
Adaptive Multi-Radar Anti-Bias Track Association Algorithm Based on Reference Topology Features


Abstract
1. Introduction
- (a)
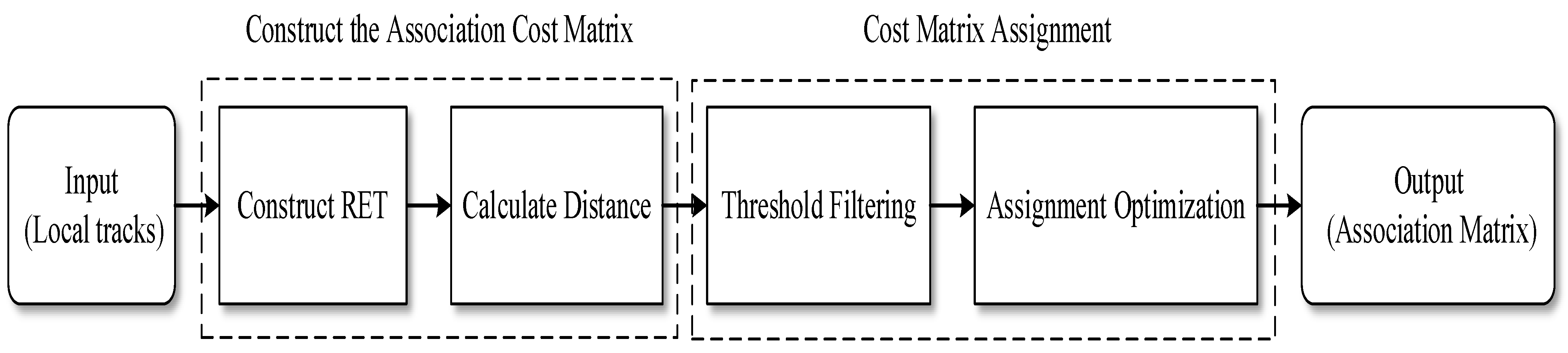
- The multi-radar adaptive RET algorithm proposed in this paper addresses the instability caused by manually setting the association threshold in the OSPA metric. It improves the traditional OSPA metric and threshold by modifying the Mahalanobis distance to account for offset bias, and constructs a multi-dimensional association cost matrix. This modification replaces the fixed threshold with an adaptive one, which enhances robustness against offset bias and measurement noise.
- (b)
- To address the issue of incorrect associations caused by radar missed detections, we derived a threshold filtering method, which filters the association costs at the matrix dimension level to reduce the occurrence of forced associations between tracks from different sources. Subsequently, the Lagrangian relaxation algorithm was used to assign the association cost matrix and determine the final track association relationships.
- (c)
- The multi-radar adaptive RET algorithm achieves track association using only the radar’s position measurement information of the target, without the need for radar tracking or state estimation of the target. As a result, the algorithm is able to adapt to multi-radar track association problems in various complex motion scenarios, and simulation data have validated the effectiveness of the algorithm.
2. Track Association Problem Modeling
2.1. Target Measurement Modeling
2.2. Definition of RETs
2.3. Track Association Metric from Multi-Radars
3. Improved Adaptive Threshold and Cost Matrix Assignment
3.1. Improvement in Association Metric in the Presence of Radar Bias
3.2. Assignment of Multi-Dimensional Association Cost Matrix
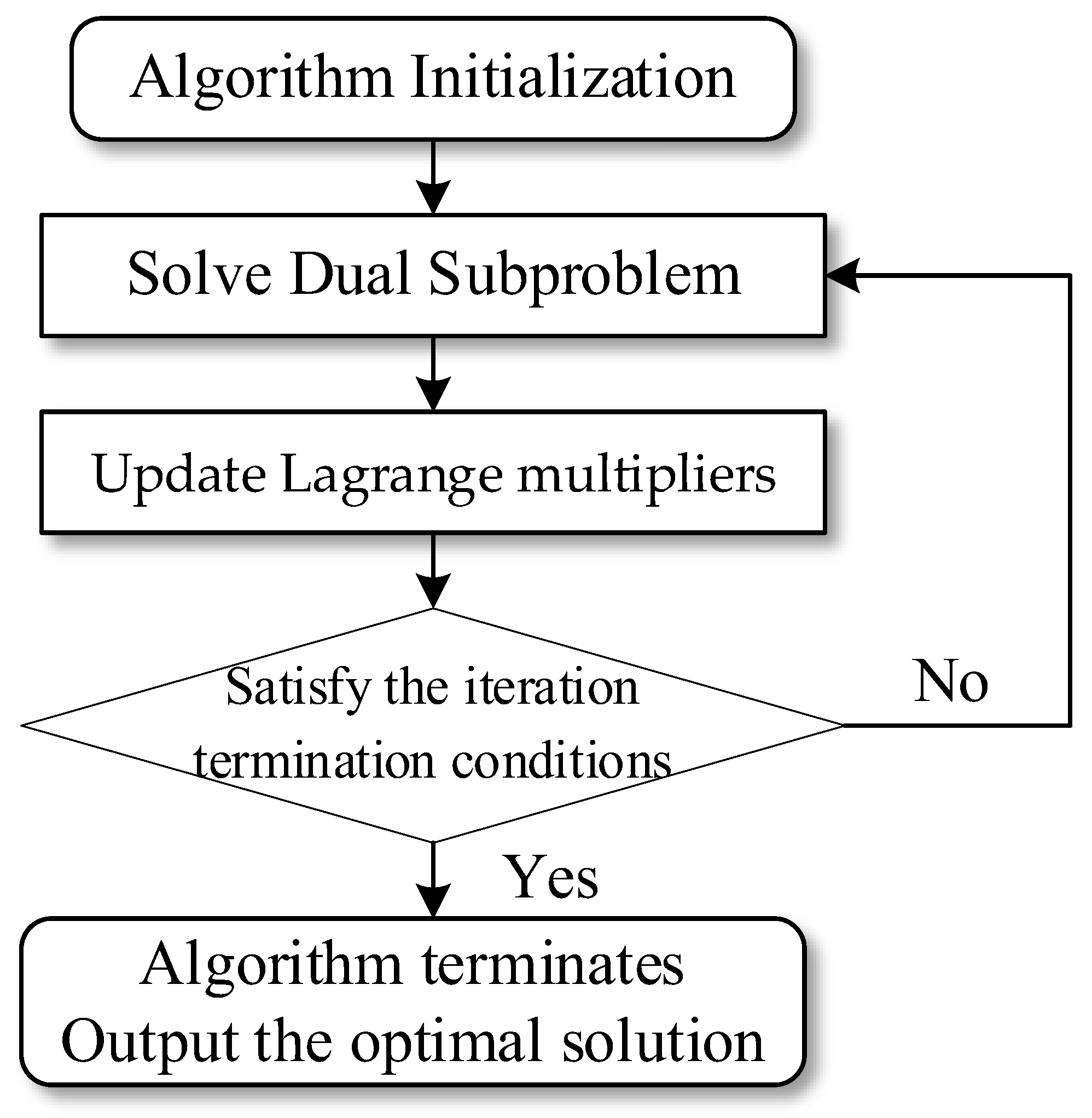
- (1)
- Initialization: , , , and iteration count , with the maximum number of iterations set to .
- (2)
- Calculate the cost of the dual problem:
- (3)
- Solve the dual subproblem:
- (4)
- Update the Lagrange multipliers: To generate a series of dual vectors , with representing the iteration count, we have
- (5)
- Construct feasible solutions: , where satisfies:
- (6)
- Iteration: Improve the quality of the solution.
4. Simulation Results and Discussion
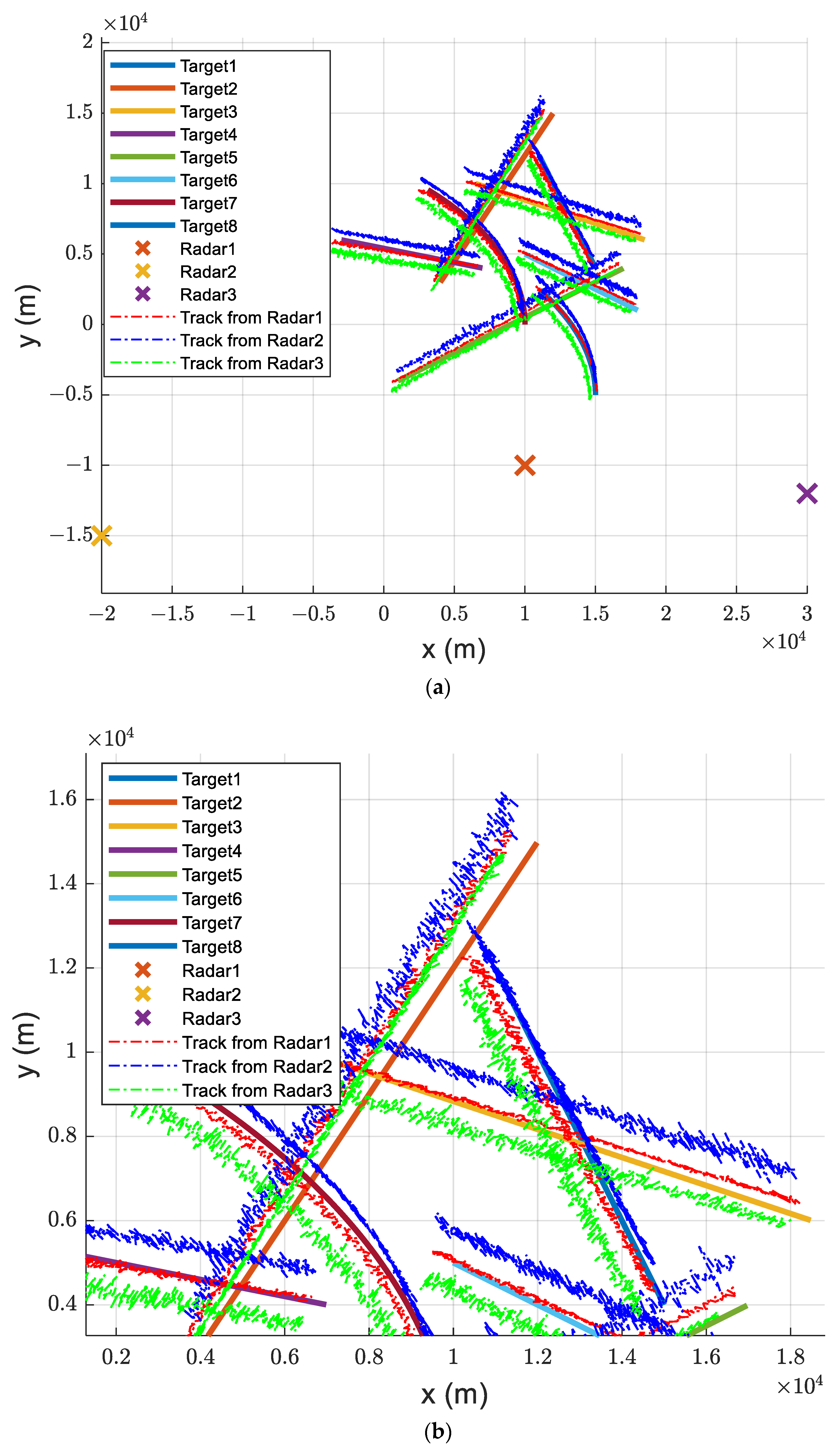
4.1. Simulation Environment
4.2. Track Association Performance
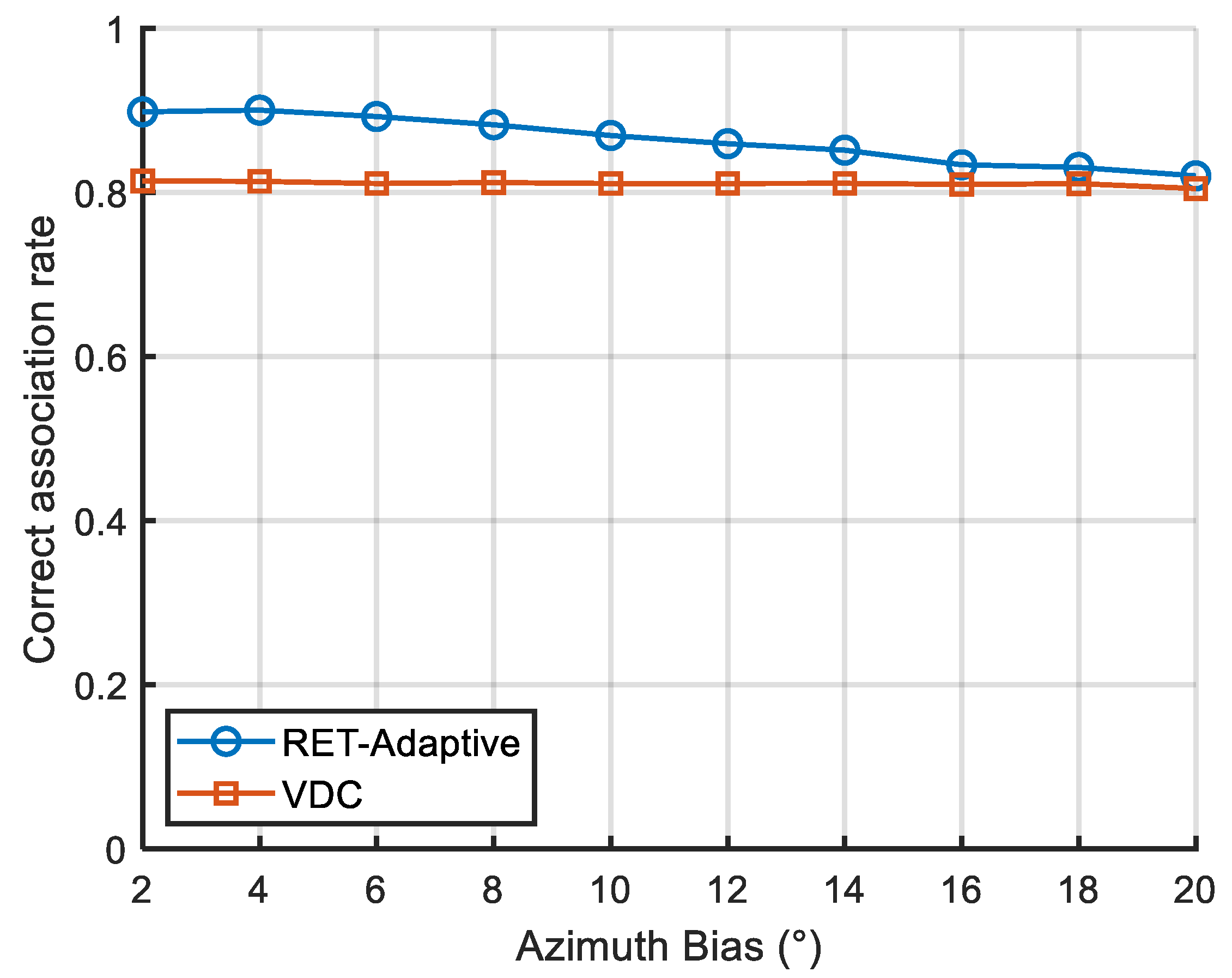
4.3. Influence of Radar Offset Bias on Algorithm Performance
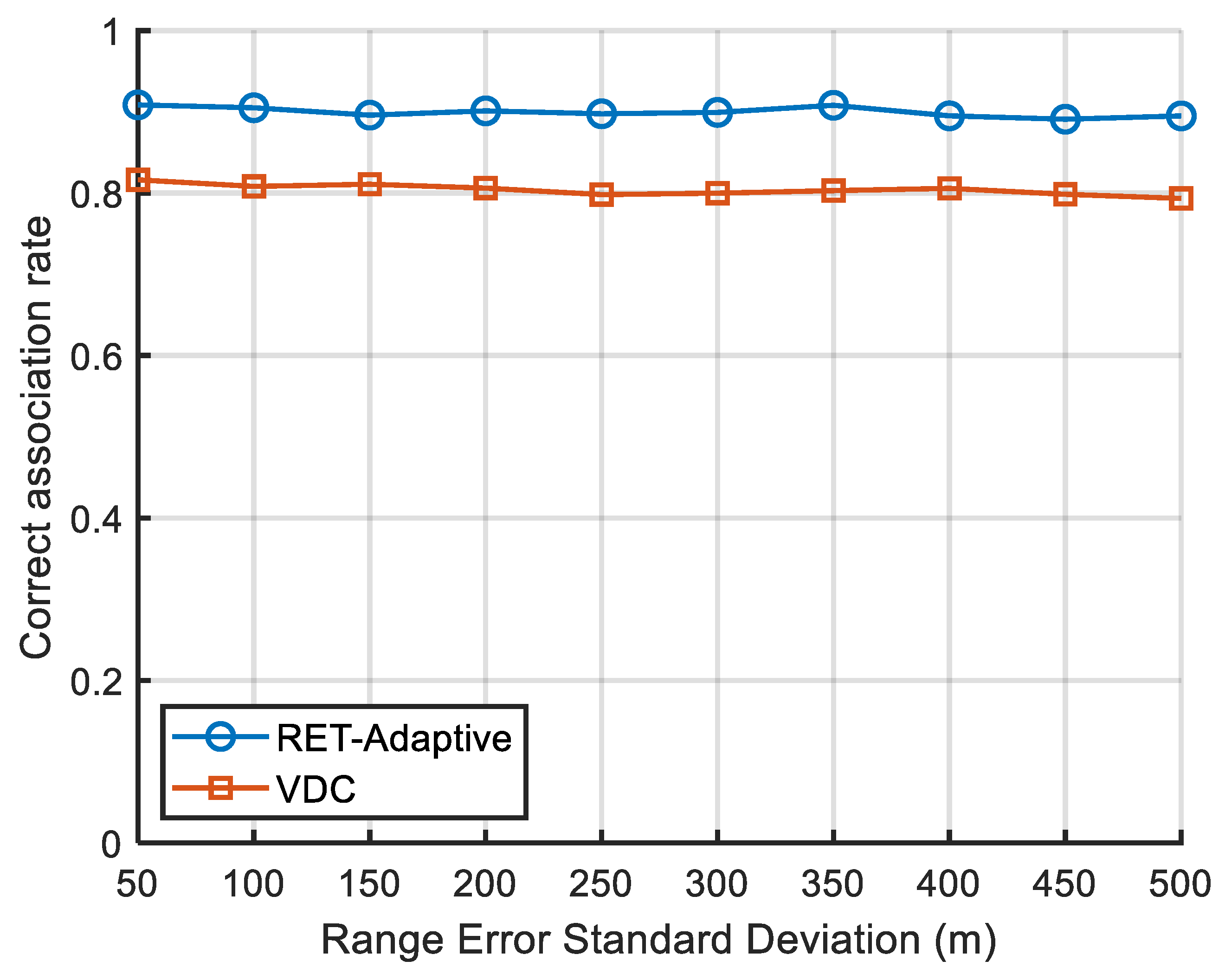
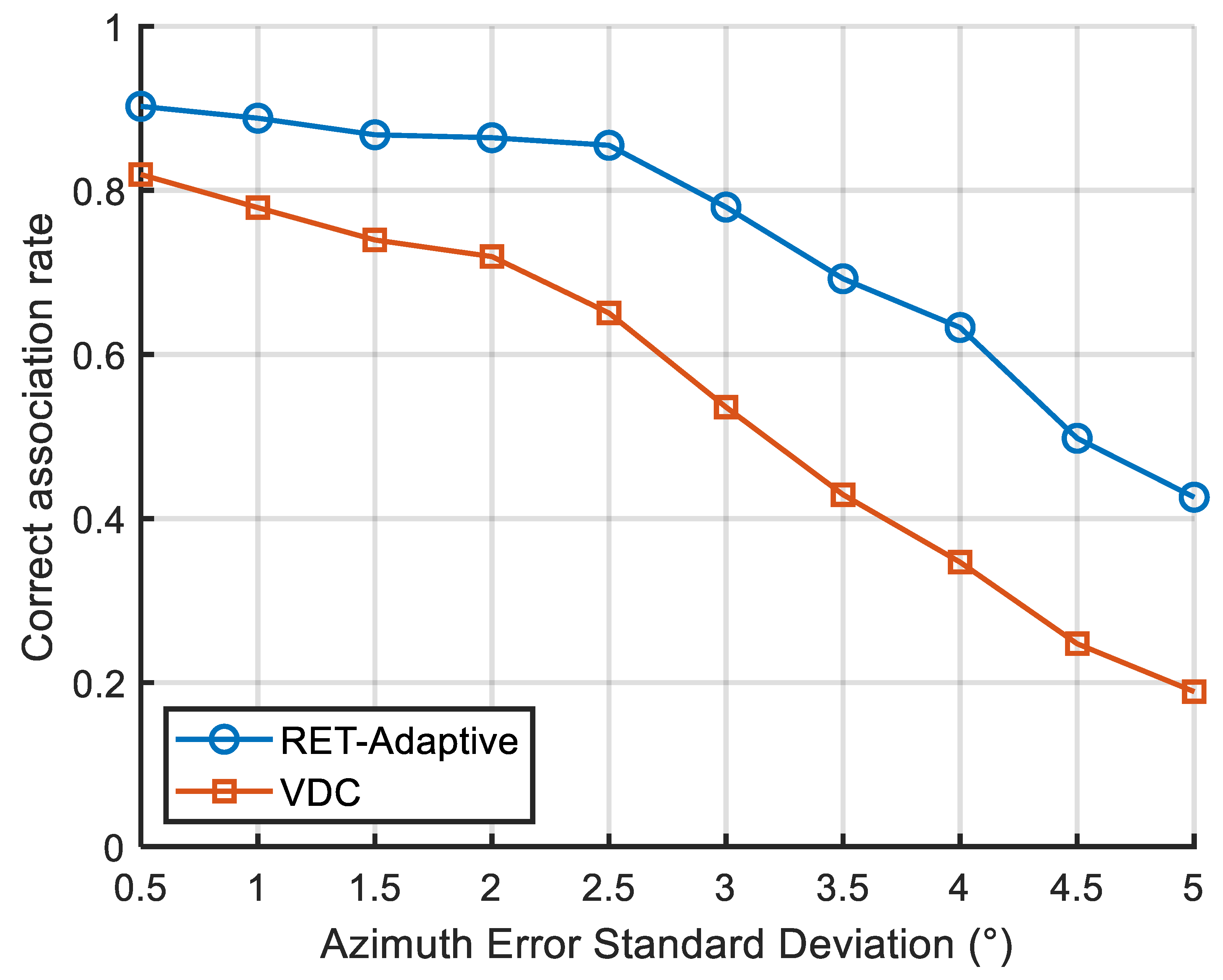
4.4. Influence of Measurement Noise on Algorithm Performance
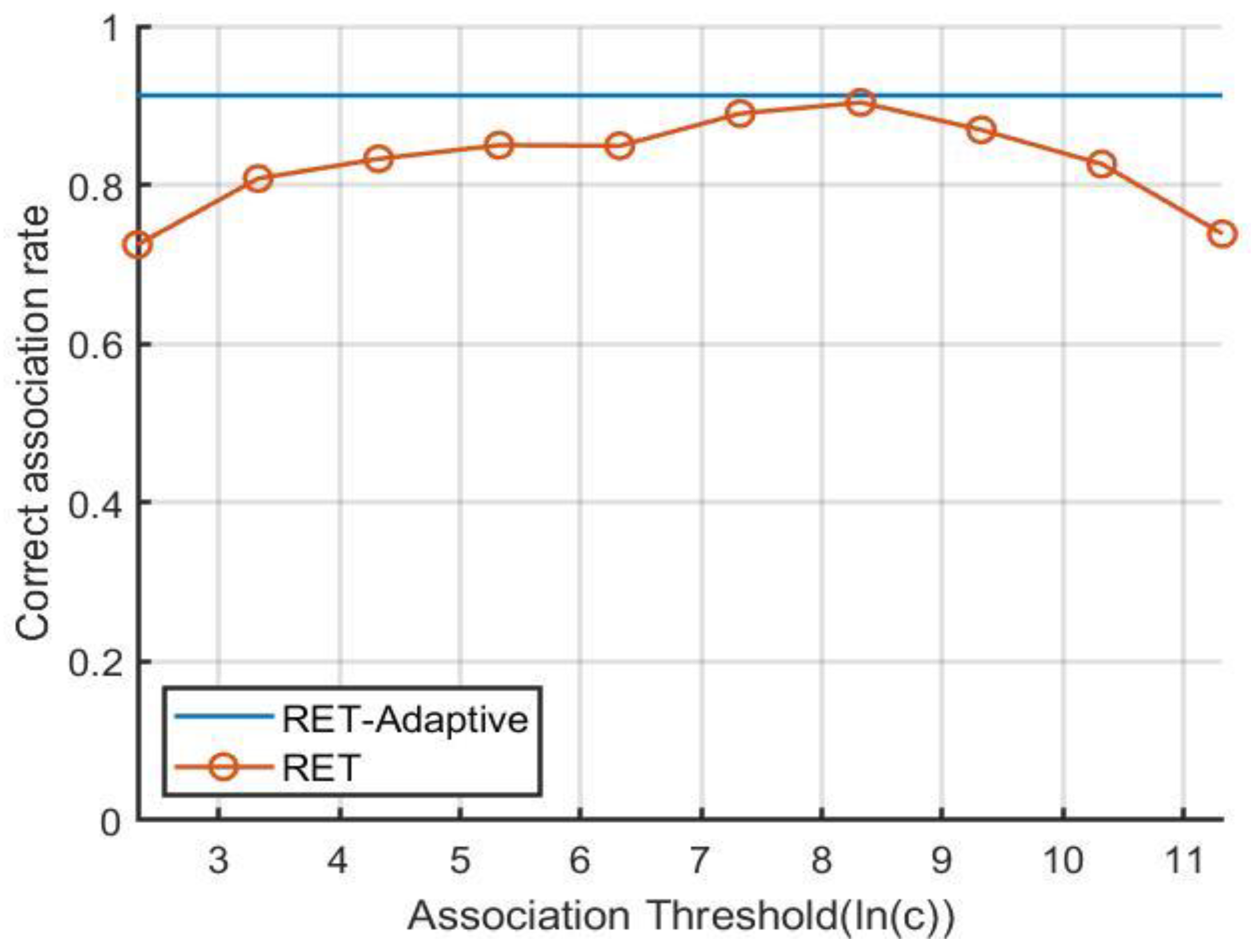
4.5. Performance Verification of Adaptive Threshold
4.6. Performance Verification of the Improved Assignment Algorithm
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhao, S.; Huang, Y.; Wang, K.; Chen, T. Multi-source data fusion method based on nearest neighbor plot and track data association. In Proceedings of the 2021 IEEE Sensors, Sydney, Australia, 31 October–3 November 2021; pp. 1–4. [Google Scholar]
- Chandrasekaran, B.; Gangadhar, S.; Conrad, J.M. A survey of multisensor fusion techniques, architectures and methodologies. In Proceedings of the IEEE SoutheastCon 2017, Concord, NC, USA, 30 March–2 April 2017; pp. 1–8. [Google Scholar] [CrossRef]
- Wang, J.; Zeng, Y.; Wei, S.; Wei, Z.; Wu, Q.; Savaria, Y. Multi-Sensor Track-to-Track Association and Spatial Registration Algorithm Under Incomplete Measurements. IEEE Trans. Signal Process. 2021, 69, 3337–3350. [Google Scholar] [CrossRef]
- Stone, L.; Williams, M.; Tran, T. Track-to-track association and bias removal. In Proceedings of the Aerosense 2002: Signal and Data Processing of Small Targets 2002, Orlando, FL, USA, 1–5 April 2002; Volume 4728, p. 315. [Google Scholar]
- Sinha, A.; Ding, Z.; Kirubarajan, T.; Farooq, M. Track quality based multitarget tracking approach for global nearest-neighbor association. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 1179–1191. [Google Scholar] [CrossRef]
- Shi, M.; Ling, Q.; Yu, Z.; Zhu, J. Association using modified Global Nearest Neighbor in the presence of bias. In Proceedings of the 32nd Chinese Control Conference, Xi’an, China, 26–28 July 2013; pp. 4688–4691. [Google Scholar]
- Thomas, T.; Sreeja, S. Comparison of Nearest Neighbor and Probabilistic Data Association Filters for Target Tracking in Cluttered Environment. In Proceedings of the 2021 IEEE 6th International Conference on Computing, Communication and Automation (ICCCA), Arad, Romania, 17–19 December 2021; pp. 272–277. [Google Scholar] [CrossRef]
- Sun, W.; Li, X.; Pang, Z.; Ji, Y.; Dai, Y.; Huang, W. Track-to-Track Association Based on Maximum Likelihood Estimation for T/R-R Composite Compact HFSWR. IEEE Trans. Geosci. Remote. Sens. 2023, 61, 1–12. [Google Scholar] [CrossRef]
- Chen, J.; Zhang, Y.; Yang, Y.; Qu, C. Multi-target Track-to-Track Association Based on Relative Coordinate Assignment Matrix. In Proceedings of the 2021 33rd Chinese Control and Decision Conference (CCDC), Kunming, China, 22–24 May 2021; pp. 1255–1260. [Google Scholar] [CrossRef]
- Tian, W.; Wang, Y.; Shan, X.; Yang, J. Analytic Performance Prediction of Track-to-Track Association with Biased Data in Multi-Sensor Multi-Target Tracking Scenarios. Sensors 2013, 13, 12244–12265. [Google Scholar] [CrossRef]
- Bu, S.; Zhou, G. Joint Data Association, Spatiotemporal Bias Compensation and Fusion for Multisensor Multitarget Tracking. IEEE Trans. Signal Process. 2023, 71, 1509–1523. [Google Scholar] [CrossRef]
- Ren, H.; Tang, M.; Zou, L.; Zhou, Y.; Li, M.; Wang, X. Variable structure bidimensional reference pattern-based anti-bias track to track association. Signal Process. 2024, 220, 109479. [Google Scholar] [CrossRef]
- Li, Z.; Chen, S.; Leung, H.; Bosse, E. Joint data association, registration, and fusion using EM-KF. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 496–507. [Google Scholar] [CrossRef]
- Zhu, H.; Leung, H.; Yuen, K.-V. A joint data association, registration, and fusion approach for distributed tracking. Inf. Sci. 2015, 324, 186–196. [Google Scholar] [CrossRef]
- Zhu, H.; Wang, W.; Wang, C. Robust track-to-track association in the presence of sensor biases and missed detections. Inf. Fusion 2016, 27, 33–40. [Google Scholar] [CrossRef]
- Levedahl, M. Explicit pattern matching assignment algorithm. In Proceedings of the Aerosense 2002: Signal and Data Processing of Small Targets 2002, Orlando, FL, USA, 1–5 April 2002; Volume 4728, pp. 461–469. [Google Scholar] [CrossRef]
- Papageorgiou, D.J.; Sergi, J.-D. Simultaneous Track-to-Track Association and Bias Removal Using Multistart Local Search. In Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, 1–8 March 2008; p. 114. [Google Scholar] [CrossRef]
- Baozhu, L.; Guan, J.; Dong, Y. Anti-bias Track Association Algorithm of Radar and Electronic Support Measurements Based on Track Vectors Detection. J. Electron. Inf. Technol. 2019, 41, 123–129. [Google Scholar]
- Tian, W.; Wang, Y.; Shan, X.; Yang, J. Track-to-Track Association for Biased Data Based on the Reference Topology Feature. IEEE Signal Process. Lett. 2014, 21, 449–453. [Google Scholar] [CrossRef]
- Lang, H.; Yu, S.; Ren, W.; Han, C.; Hu, X.; Ji, Z. Track-to-Track Association Algorithm with Spatio-Temporal Features. In Proceedings of the 2024 11th International Conference on Behavioural and Social Computing (BESC), Harbin, China, 16–18 August 2024; pp. 1–6. [Google Scholar] [CrossRef]
- Sönmez, H.H.; Hocaoğlu, A.K. Asynchronous track-to-track association algorithm based on reference topology feature. Signal, Image Video Process. 2021, 16, 789–796. [Google Scholar] [CrossRef]
- Cengiz, S.K.; Abu-Khalaf, M.; Yeniçeri, R. A Review of Multidimensional Assignment in Multi-Sensor Multi-Target Tracking. In Proceedings of the 2024 Integrated Communications, Navigation and Surveillance Conference (ICNS), Herndon, VA, USA, 23–25 April 2024; pp. 1–15. [Google Scholar] [CrossRef]
- Zhu, H.; Han, S. Track-to-Track Association Based on Structural Similarity in the Presence of Sensor Biases. J. Appl. Math. 2014, 2014, 1–8. [Google Scholar] [CrossRef]
- Zhu, H.; Wang, C. Joint track-to-track association and sensor registration at the track level. Digit. Signal Process. 2015, 41, 48–59. [Google Scholar] [CrossRef]
- Qi, L.; Liu, Y.; Ren, H.; He, Y. Air-platform multi-radar anti-bias tracks association algorithm. Acta Aeronaut. Astronaut. Sin. 2018, 39, 321691. [Google Scholar]
- Zou, W.; Sun, W. A multi-dimensional data association algorithm for multi-sensor fusion. In Intelligent Science and Intelligent Data Engineering: Third Sino-Foreign-Interchange Workshop, IScIDE 2012, Nanjing, China, 15–17 October 2012; Revised Selected Papers 3; Springer: Berlin/Heidelberg, Germany, 2013; pp. 280–288. [Google Scholar]
- Tong, C.; Lin, Y.; Guo, Y.; Zuo, Y. A Fast and Efficient Data Association of Passive Sensor Tracking. In Proceedings of the 2010 International Conference on Intelligent Computation Technology and Automation, Changsha, China, 11–12 May 2010; pp. 88–91. [Google Scholar]
- Levedahl, M.; Glass, J. Analysis of Costs for the GNP Problem. J. Adv. Inf. Fusion 2021, 16, 17. [Google Scholar]
- Zhu, J.; Yin, T.; Guo, W.; Zhang, B.; Zhou, Z. An Underwater Target Azimuth Trajectory Enhancement Approach in BTR. Appl. Acoust. 2025, 230, 110373. [Google Scholar] [CrossRef]
- Tian, W.; Huang, G.; Du, X.; Wang, Y.; Peng, H. Track to track association based on iterative reference pattern. In Proceedings of the 2017 International Conference on Computer Technology, Electronics and Communication (ICCTEC), Dalian, China, 19–21 December 2017; pp. 289–294. [Google Scholar]
- Lin, X.; Li, C.T.; Sanchez, V.; Maple, C. On the detection-to-track association for online multi-object tracking. Pattern Recognit. Lett. 2021, 146, 200–207. [Google Scholar] [CrossRef]
- Qi, L.; He, Y.; Dong, K.; Liu, J. Multi-radar anti-bias track association based on the reference topology feature. IET Radar Sonar Navig. 2018, 12, 366–372. [Google Scholar] [CrossRef]
- Zhu, J.; Xie, Z.; Jiang, N.; Song, Y.; Han, S.; Liu, W.; Huang, X. Delay-Doppler Map Shaping through Oversampled Complementary Sets for High-Speed Target Detection. Remote. Sens. 2024, 16, 2898. [Google Scholar] [CrossRef]
- Chen, S.; Zhang, H.; Ma, J.; Xie, H. Asynchronous Track-to-Track Association Based on Pseudo Nearest Neighbor Distance for Distributed Networked Radar System. Electronics 2023, 12, 1794. [Google Scholar] [CrossRef]
- Yin, T.; Guo, W.; Zhu, J.; Wu, Y.; Zhang, B.; Zhou, Z. Underwater Broadband Target Detection by Filtering Scanning Azimuths Based on Features of Subband Peaks. IEEE Sens. J. 2025, 25, 13601–13609. [Google Scholar] [CrossRef]
- Tian, W. Reference pattern-based track-to-track association with biased data. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 501–512. [Google Scholar] [CrossRef]
- Shi, Y.; Wang, Y.; Wang, S.G. Fuzzy data association based on target topology of reference. J. Natl. Univ. Def. Technol. 2006, 28, 105. [Google Scholar]
- Song, Q.; Xiong, W.; He, Y. A track alignment-correlation algorithm based on topological description of complex number field. J. Astronaut. 2011, 32, 560. [Google Scholar]
- Tokta, A.; Hocaoglu, A.K. A track to track association algorithm based on weighted state correlation similarity. In Proceedings of the 2018 International Conference on Artificial Intelligence and Data Processing (IDAP), Malatya, Turkey, 28–30 September 2018; pp. 1–4. [Google Scholar]
- Kaplan, L.M.; Bar-Shalom, Y.; Blair, W.D. Assignment costs for multiple sensor track-to-track association. IEEE Trans. Aerosp. Electron. Syst. 2008, 44, 655–677. [Google Scholar] [CrossRef]
- Ristic, B.; Vo, B.-N.; Clark, D. Performance evaluation of multi-target tracking using the OSPA metric. In Proceedings of the IEEE Conference on Information Fusion, Edinburgh, UK, 26–29 July 2010. [Google Scholar] [CrossRef]
- Beard, M.; Vo, B.T.; Vo, B.-N. OSPA(2): Using the OSPA metric to evaluate multi-target tracking performance. In Proceedings of the 2017 International Conference on Control, Automation and Information Sciences (ICCAIS), Chiang Mai, Thailand, 31 October–1 November 2017; pp. 86–91. [Google Scholar]
- Gaudioso, M. A view of Lagrangian relaxation and its applications. In Numerical Nonsmooth Optimization: State of the Art Algorithms; Springer: Berlin/Heidelberg, Germany, 2020; pp. 579–617. [Google Scholar]
- Pattipati, K.; Deb, S.; Bar-Shalom, Y.; Washburn, R. A new relaxation algorithm and passive sensor data association. IEEE Trans. Autom. Control. 1992, 37, 198–213. [Google Scholar] [CrossRef]
- Cheng, L.; Ning, Y.-s.; Song, M.-c. Lagrangian relaxation heuristic algorithm of arc routing problem under time-space network. J. Traffic Transp. Eng. 2022, 22, 273–284. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experiment | ||
|---|---|---|
| Experiment 1 | ||
| Experiment 2 |
| Experiment | ||
|---|---|---|
| Experiment 1 | ||
| Experiment 2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wei, S.; Zhou, X.; Wang, J.; Pang, R.; Li, X.; Liu, Q. Adaptive Multi-Radar Anti-Bias Track Association Algorithm Based on Reference Topology Features. Remote Sens. 2025, 17, 1876. https://doi.org/10.3390/rs17111876
Wei S, Zhou X, Wang J, Pang R, Li X, Liu Q. Adaptive Multi-Radar Anti-Bias Track Association Algorithm Based on Reference Topology Features. Remote Sensing. 2025; 17(11):1876. https://doi.org/10.3390/rs17111876
Chicago/Turabian StyleWei, Shaoming, Xuan Zhou, Jun Wang, Rui Pang, Xueqing Li, and Qiang Liu. 2025. "Adaptive Multi-Radar Anti-Bias Track Association Algorithm Based on Reference Topology Features" Remote Sensing 17, no. 11: 1876. https://doi.org/10.3390/rs17111876
APA StyleWei, S., Zhou, X., Wang, J., Pang, R., Li, X., & Liu, Q. (2025). Adaptive Multi-Radar Anti-Bias Track Association Algorithm Based on Reference Topology Features. Remote Sensing, 17(11), 1876. https://doi.org/10.3390/rs17111876