1. Introduction
The bidirectional reflectance distribution function (BRDF), which parametrically describes the pattern of surface reflectance with respect to the observation angle [
1], is the core theoretical framework for characterizing the anisotropic reflectance properties of features in quantitative remote sensing. However, it is challenging to directly construct the complete BRDF shape because remote sensors can acquire reflection information from only limited angles [
2]. The BRDF model can be applied to extend the limited remote sensing data to the whole observation space to reconstruct the anisotropic reflectance variations in the hemispherical space, which provides an effective and convenient way to quantitatively estimate surface parameters such as the leaf area index (LAI), clumping index (CI), reflectance, and albedo [
3,
4,
5,
6,
7,
8,
9,
10]. The spectral and angular information in the BRDF model contributes to the accurate inversion of surface characteristics and supports the application of remote sensing data in land cover classification, radiation balance, ecosystem monitoring, etc. [
11].
Land surface BRDF models are generally categorized into empirical, semi-empirical, and physical models. The semi-empirical BRDF model integrates the strengths of both empirical and physical models by parameterizing certain complex factors within the physical model, thereby maintaining computational efficiency while retaining physical interpretability. For example, the semi-empirical kernel-driven BRDF model represents surface reflectance as a weighted sum of kernel functions, which are formulated on the basis of approximate physical assumptions that decompose anisotropic reflectance into isotropic scattering, volumetric scattering, and geometric-optical scattering components. The isotropic scattering kernel describes the scattering characteristics of the Lambertian surface, the volumetric scattering kernel represents the anisotropic scattering of the horizontal homogeneous layers [
12], and geometrical-optical scattering kernels simulate scattering variations induced by the three-dimensional structure of the feature, interprojected shadows, etc. [
13,
14]. Over the years, various kernel functions have been developed and validated to address diverse remote sensing applications, including Rossthick, Rossthin, LiSparse, LiDense, and LiTransit [
13,
14,
15,
16,
17]. These kernel functions and the BRDF models of kernel combinations have been validated through numerous observations to confirm robust BRDF simulation and inversion capabilities in different application scenarios [
18,
19,
20,
21,
22]. Therefore, the kernel-driven BRDF model serves as the main algorithm for deriving surface albedo and directional reflectance from multi-angle remote sensing observations such as the Polarization and Directionality of the Earth’s Reflectances (POLDER), MODIS, Multi-angle Imaging Spectroradiometer (MISR), VIIRS, and Earth Polychromatic Imaging Camera (EPIC) [
3,
23,
24,
25,
26,
27].
Since 2000, the MODIS team has generated the BRDF, Albedo, and NBAR product suite via a kernel-driven BRDF model that uses the RossThick-LiSparseReciprocal (RTLSR) kernel combination as the main operational algorithm to integrate multi-angle remote sensing observations acquired by MODIS aboard the Terra and Aqua satellites [
24,
28]. In 2012, VIIRS, similar in design to MODIS, was launched aboard the Suomi-NPP satellite. Similarly, the multi-angle observations acquired by VIIRS were integrated with RTLSR algorithms to produce the VIIRS BRDF product suite [
25], which continues MODIS’s long-term Earth record [
29,
30]. The long-term, publicly available, and standardized BRDF products provided by the official MODIS and VIIRS teams facilitate the estimation of medium-resolution surface parameters, such as albedo and reflectance, and support investigations into the structural and physiological parameters of vegetation, such as NDVI, LAI, CI, tree height, and vegetation phenology [
3,
7,
9,
31,
32,
33,
34,
35]. Researchers have long utilized MODIS data for the estimation of various geophysical parameters. With the release of VIIRS data, the migration of cross-sensor algorithms and long time-series parameter inversion have been further developed [
29].
However, ensuring the consistency and accuracy of cross-sensor algorithms and parameters is a persistent challenge in research, necessitating special attention to the uncertainties introduced by differences in sensor characteristics. Although MODIS and VIIRS share functional similarities, they still exhibit significant differences in terms of observation time, effective spatial resolution, spectral response, etc. First, MODIS is on board the Terra and Aqua satellites, which have transit times of 10:30 a.m. and 1:30 p.m. local time, respectively, whereas VIIRS is on board the Suomi-NPP satellite, which has a transit time of 1:30 p.m. It is possible that the quality and quantity of data from multi-angle observations used for BRDF parameter fitting are affected by issues such as atmospheric conditions and surface states caused by differences in transit times [
36]. Second, MODIS provides data at spatial resolutions of 250 m, 500 m, and 1 km, whereas VIIRS offers resolutions of 375 m and 750 m [
37,
38]. A higher spatial resolution enables the detection of finer surface features, enhancing the retrieval of detailed information. However, it may also increase data variability and noise, potentially introducing greater uncertainty in quantitative analyses. Third, the spectral band configurations and sensor response functions of MODIS and VIIRS are different, which influences their sensitivity to various surface features. Such differences can impact the consistency of BRDF parameter retrievals and the estimation of derived variables.
Recently, validation via multi-angle datasets and in situ measurements has demonstrated that the estimated surface directional reflectances and albedos obtained from MODIS and VIIRS exhibit strong consistency [
25]. However, the estimation of vegetation structure parameters (e.g., NDHD and CI estimation) depends on the variability in surface anisotropy, as characterized by the BRDF parameters. This dependence may increase uncertainty in the BRDF parameter fitting process, making parameter estimation more sensitive to potential uncertainties in the data source and leading to greater differences in the results when the same algorithm is applied across different sensor data [
39]. In the estimation and evaluation of different downstream parameters, it is very important to compare and analyze the consistency of the input BRDF data before exploring the consistency of the parameter estimation results. However, the current consistency assessment of BRDF parameter products between different sensors is still limited and needs to be further investigated. The consistency and potential problems of cross-sensor BRDF products must be considered and evaluated, and the specific impacts of the process of inverting the derived angular indices (e.g., NDHD) and its effects on the accuracy and consistency of the estimation results are also worthy of research, as this would help clarify some of the considerations in the application of BRDF products in the future.
This study applied the RossThickChen-LiSparseReciprocal (RTCLSR) kernel-driven BRDF model to assess the consistency of the BRDF parameter products and derived indices from MODIS and VIIRS in the red band and NIR band, respectively. In addition, we examined the response of the BRDF parameters to variations in the equal NDHD intervals and the spatial and temporal distributions of the zero-valued BRDF parameters and their impact on the NDHD estimation.
Section 2 describes the study area, the datasets utilized, and the specific methods.
Section 3 describes the results of the consistency assessment of the BRDF products at the site and regional scales and the analysis of the distribution and effects of zero-valued BRDF pixels.
Section 4 discusses the potential sources of differences between the two products and promising solutions.
Section 5 presents the main conclusions of this study.
3. Methods
3.1. BRDF Model and the Derived Indices
The kernel-driven BRDF model with the RossThickChen-LiSparseReciprocal (RTCLSR) kernel combination is employed in this study to derive BRDF-related surface indices, including hotspot reflectance (
Rhot), darkspot reflectance (
Rdark), white-sky albedo (WSA), black-sky albedo (BSA), and Normalized Difference Hotspot-Darkspot (NDHD). This model is described by Roujean et al. [
18] as a linear combination of isotropic, volumetric, and geometric-optical (GO) scattering components [Equation (1)].
where
is the reflectance in band
in the angular geometry represented by the solar zenith angle (
), view zenith angle (
), and relative azimuth angle (
).
Kvol is the volumetric kernel derived from the RossthickChen volumetric scattering radiative model [Equation (2)]. The RossthickChen kernel is a modification of the Rossthick kernel that was proposed by Jiao et al., who introduced hotspot parameters (
C1 and
C2 represent the hotspot height and hotspot width, respectively) to increase the reconstruction accuracy of the hotspot effect [
17].
Kgeo is the GO kernel derived from the LiSparseReciprocal geometric shadow casting model [Equation (3)].
is the phase angle and is defined in Equation (4).
fiso,
fvol, and
fgeo are spectrally dependent coefficients, which represent the weights of the corresponding scattering kernels.
Since the RTC kernel only corrects the shape of the BRDF in the hotspot region and inherits the rest from the RT kernel, the obtained BRDF parameter products derived from the standard RTLSR model should be applicable for use in the RTCLSR model in most cases [
7]. Jiao et al. conducted a comprehensive comparison of BRDF parameters retrieved from RTCLSR and RTLSR models using MODIS and POLDER data, demonstrating high consistency between the two models in the red and NIR bands [
3]. These results support the direct use of BRDF parameters from RTLSR-based products (MCD43A1, VNP43IA1) as inputs to the RTCLSR model for calculating derived indices, without the need for re-inversion. Moreover, the RTCLSR model enables a more accurate estimation of various indices that characterize surface reflectance anisotropy at different levels. For example,
Rhot and
Rdark, which characterize surface scattering and shading properties in specific directions, as well as WSA and BSA, which describe the surface reflectance characteristics under purely diffuse and direct illumination conditions, serve as key input parameters for energy-balance studies. The NDHD is defined by Equation (5); it retains the directional information of the BRDF parameters and is highly sensitive to structural features. The comparison and evaluation of these key parameters reveal the differences between the MODIS and VIIRS BRDF products and provide reference for improving the inversion of directional parameters and increasing the applicability of remote sensing products.
3.2. Assessment of the Consistency Between the BRDF Parameters and Derived Indices
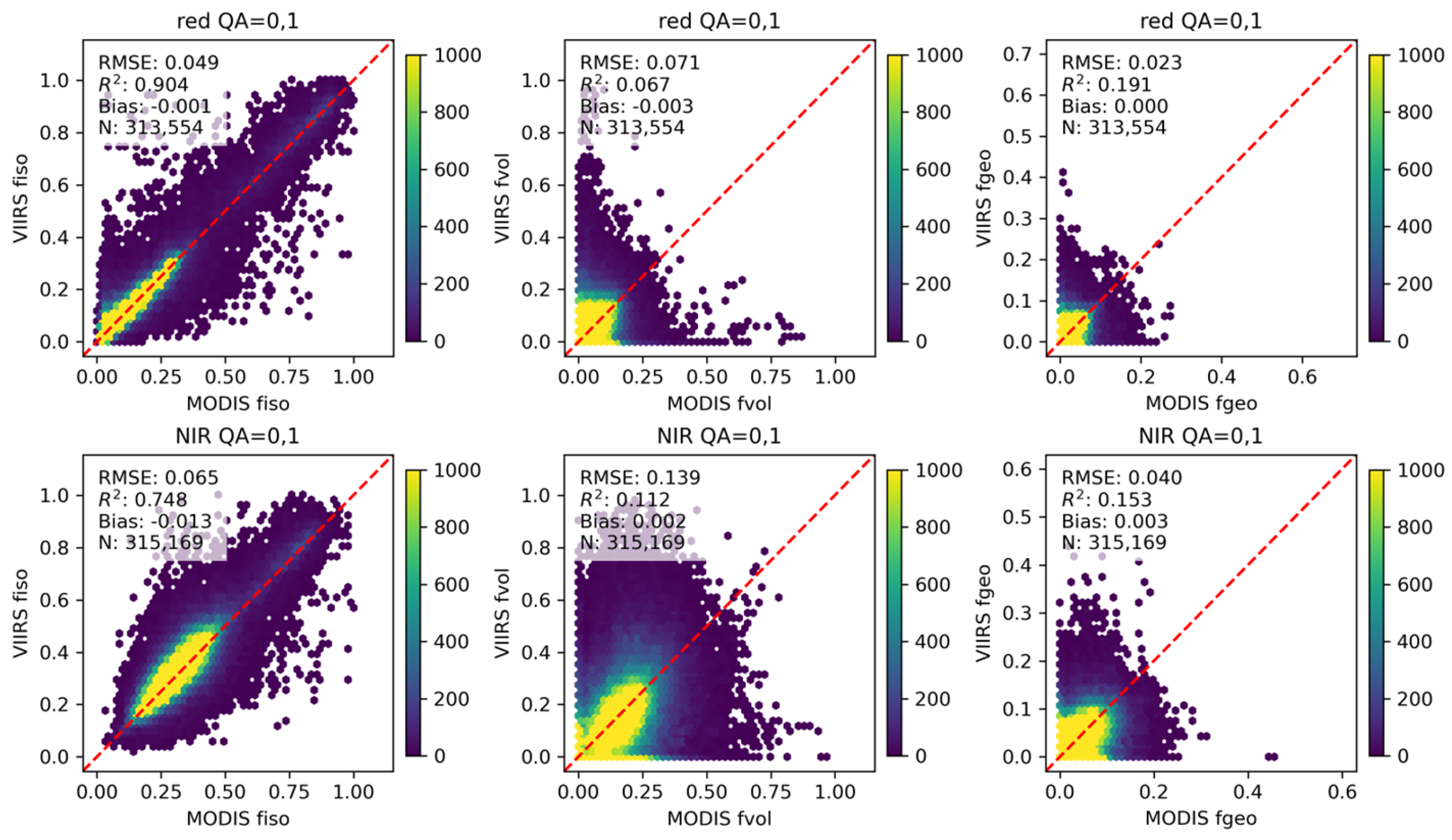
To assess the consistency of the MODIS and VIIRS BRDF parameters systematically, we utilized the BRDF products of the 359 selected sites from the BELMANIP 2.1 network in the two bands (red band and NIR band). We filtered the data to include only those pixels for which the quality assurance flags (QA) of both MCD43A1 and VNP43IA1 products were 0 or 1, which corresponded to retrievals derived from the full inversion algorithm (QA = 0) and magnitude inversion algorithm (QA = 1), respectively. Considering the potential differences in spectral response functions (SRFs) between MODIS (B1/B2) and VIIRS (I1/I2), we collected the SRF profiles for each band and integrated them with measured spectral data to calculate band-specific conversion coefficients. The results showed excellent agreement between MODIS and VIIRS (R2 > 0.999). Therefore, spectral discrepancies were not further emphasized in this study.
The root mean square error (RMSE), bias, coefficient of determination (R
2), and relative root mean square error (rRMSE) [Equations (6)–(9)] were applied to quantify the consistency of the BRDF model parameters (
fiso,
fvol, and
fgeo) and the derived indices. Given that the BRDF model parameters exhibit more extreme sensitivities because they are limited by observational distributions, model fitting, noise, etc., time-series surface parameters such as typical directional reflectance (
Rhot and
Rdark), albedo (WSA and BSA), and NDHD were simultaneously derived from the BRDF parameters for comparison; we analyzed how the differences in the BRDF model parameters propagated to the inversion results of the various parameters.
In these equations, Ai denotes the MODIS parameters, Bi denotes the VIIRS parameters, and N denotes the number of samples. Amean represents the average of all Ai values.
We then expanded the analysis to a regional scale, focusing on the contiguous United States (CONUS) as the study area, and computed the mean and relative differences in the BRDF parameters between the two sensors. Assuming that changes at the surface during a month are negligible, the coefficient of variation (CV) was used to measure the degree of variability in the BRDF parameters [Equation (10)]. A small CV indicates that the parameter is stable over time, whereas a high CV may reflect seasonal variations or significant fluctuations in the observed conditions.
3.3. Analysis of the Response of the BRDF Parameters to the NDHD
The different types of derived indices have distinct meanings and applications and are influenced by fluctuations in the BRDF parameters. In this study, NDHD is used as an example to investigate the response of the BRDF parameters as the input data to variations in NDHD. High-quality (QA = 0) MODIS BRDF data from 359 sites were selected and used as inputs to the RTCLSR model to reconstruct Rhot and Rdark at a specific solar zenith angle (30°) and to calculate the NDHD; the NDHD calculation process is complex because of the numerous interacting variables. Therefore, we partitioned the range of the NDHD into small intervals at 0.1, investigated the distributions of the corresponding BRDF parameters as the NDHD increased in equal intervals, and determined the most sensitive parameters influencing the NDHD variations. The mechanism by which the BRDF parameter product performance affected the calculation results downstream was thoroughly analyzed to support the optimization of product applications and reduce uncertainty.
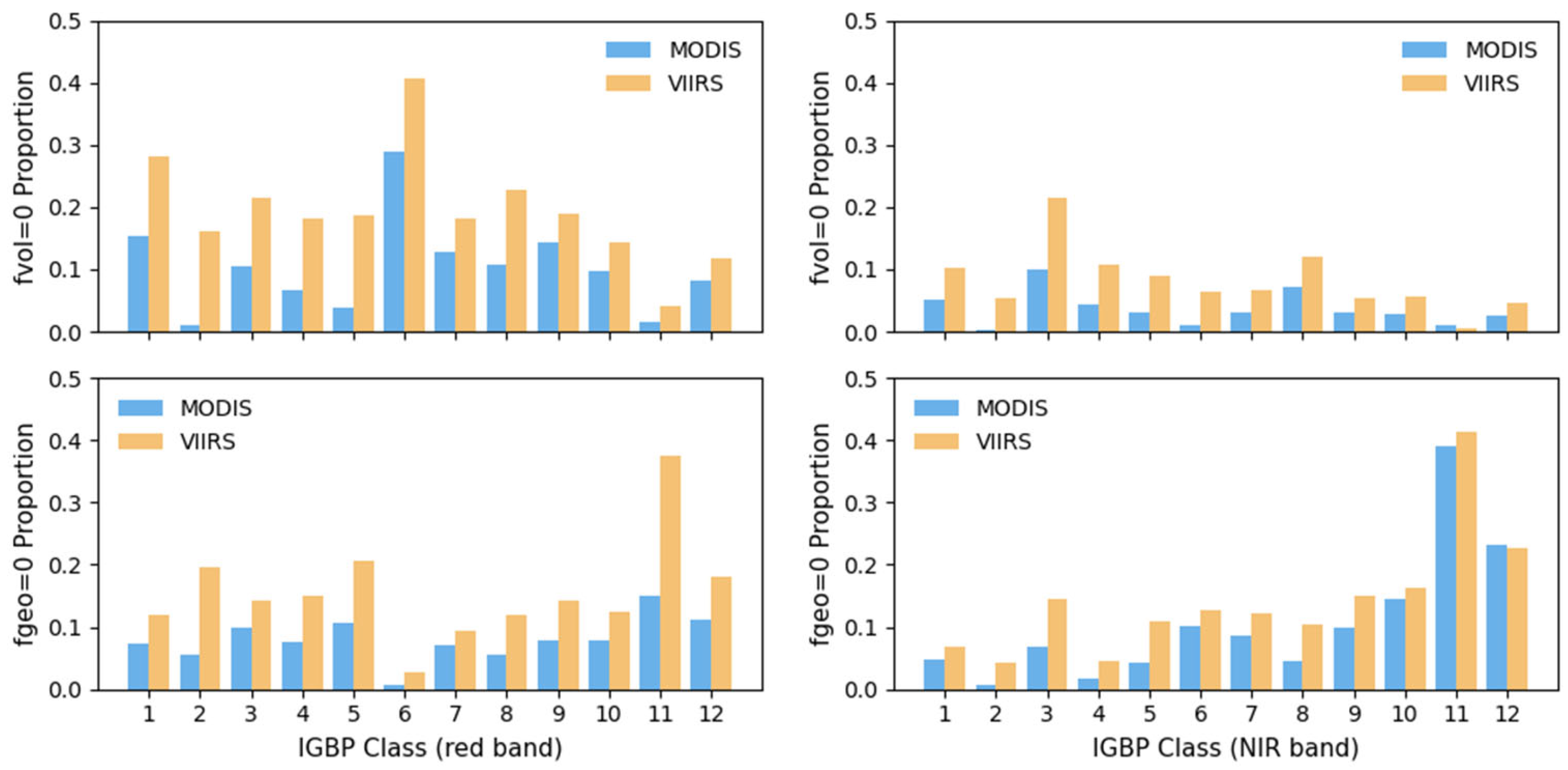
3.4. Statistical and Impact Analysis of the BRDF Parameter Zero-Valued Pixel Distributions
Among the parameters of the kernel-driven BRDF model, fvol and fgeo are crucial for reconstructing anisotropic reflection patterns. Moreover, the anisotropic reflection properties of the surface captured by the BRDF parameters are represented more directly and sensitively than are the properties measured as surface reflectance and albedo at specific angles. Owing to inherent limitations of the model and observation data constraints, there are some cases in which the fvol and fgeo inversion values of the pixels are set to zero during the multi-angle observation and BRDF model fitting process. This is reasonable in model simulations, but these cases still face limitations and uncertainties in characterizing actual anisotropic reflection patterns. First, we analyzed the variations in the distribution of zero-valued pixels across months and land cover types over the period of 2015–2017, using all available data at the 359 sites from the BELMANIP 2.1 network, and mapped their global spatial distribution. Next, we filtered out a dataset containing all pixels for which the MODIS fvol was nonzero and VIIRS fvol was zero. This dataset was used to evaluate the impact of setting fvol to zero on the reconstruction of Rhot and Rdark and the estimation of NDHD, thereby clarifying the potential effect of setting fvol to zero on subsequent parameter calculations.
5. Discussion
5.1. Potential Problems with BRDF Inversion
The fluctuations in the BRDF parameter significantly affect the estimation of derived indices that are sensitive to anisotropic reflection, and a wide distribution of zero-valued BRDF pixels may jeopardize the further application of the BRDF parameter product, particularly in producing consistent remote sensing CI products from MODIS to VIIRS, which rely on the sensitive hotspot reflectance. The impact of zero-valued BRDF parameter pixels on the estimation of derived indices is not necessarily absolute; assigning zero values to parameters in the fitting process can be justified for valid multi-angle observations, but it may contribute to the overfitting of anisotropic reflection in the hemispherical space.
Existing BRDF products rely on a limited set of multi-angle observations. MODIS BRDF products are jointly generated from multi-angle observations acquired by MODIS aboard the Terra and Aqua satellites, whereas VIIRS BRDF products are derived from VIIRS observations obtained with a single satellite. For example, the VNP43 product is derived from VIIRS observations aboard the Suomi-NPP satellite, whereas the VJ143 product originates from VIIRS data on the JPSS-1 satellite. Although VIIRS was designed as the successor to MODIS, significant differences remain. One key difference is its larger swath width, which enables VIIRS to acquire more observations at larger zenith angles [
37]. However, as the zenith angle increases, the atmospheric influence on observations can introduce greater uncertainties, and the effect of shadow overlap among features becomes increasingly complex [
43]. The kernel-driven model is considered to have a better fitting ability for interpolation from small to medium zenith angles and may struggle to accurately capture mutual occlusion and projection variations when extrapolating to large zenith angles, potentially leading to distortions in the fitting process due to noise or observational uncertainties [
22]. Another key difference is that VIIRS on a single platform collects fewer observations than does MODIS on two platforms. The VNP43 product of interest in this study is generated from multi-angle observations collected by the VIIRS onboard the Suomi-NPP satellite, which crosses the equator at 1:30 p.m., whereas the MODIS onboard the Terra satellite crosses the equator at 10:30 a.m. This SNPP-VIIRS observation is more likely to be contaminated, especially in the tropics and mid-latitudes where convection is active; in contrast, many regions have not yet formed or are in the early stages of cloud development during the morning, which has less impact on the MODIS observations. However, BRDF parameter inversion relies on sufficient high-quality multi-angle observations to accurately characterize surface anisotropy, whereas inadequate angular sampling can oversimplify BRDF inversion and increase susceptibility to noise-induced distortions.
The differences between MODIS and VIIRS are also influenced by factors such as radiometric calibration differences [
44] and inconsistencies in effective spatial resolution [
25]. These processing procedures applied to sensor observations are also highly likely to introduce systematic biases, which in turn affect the retrieval of BRDF parameters. For example, the effective spatial resolutions of MODIS and VIIRS are different. The original multi-angle observations are first resampled onto a fixed spatial grid with a nominal resolution of 500 m. Based on these gridded observations, BRDF parameters are then derived through a semi-empirical, kernel-driven BRDF model, which models surface anisotropy by fitting kernel coefficients. However, the effective spatial resolution of these products is inherently coarser than the nominal grid size due to the spatial aggregation and smoothing effects introduced during the compositing and inversion processes. Previous studies have shown that the effective resolution of MODIS 500 m BRDF/Albedo/NBAR products typically remains below 1 km, while VIIRS gridded products exhibit median effective resolutions under 600 m [
45]. Consequently, even though both MODIS and VIIRS BRDF products are provided at a nominal 500 m resolution, the actual surface areas represented by each pixel can differ between the two sensors. The mismatch in spatial representativeness becomes particularly significant in regions with strong surface heterogeneity, where variations in land cover or surface structure within a pixel can lead to noticeable differences in the BRDF parameters. In such cases, parameters representing anisotropic scattering components are especially sensitive to these differences, which may result in larger inter-sensor differences.
In addition to the impact of upstream observation sampling on the BRDF inversion accuracy, the limitations of the algorithms are also important. Both the MODIS and VIIRS BRDF products use the RTLSR model as the main algorithm and use atmospherically corrected surface reflectance observations collected over a 16-day period as inputs. The optimal BRDF model parameters are derived by minimizing the sum of squared errors between the observations and model simulations through iterative optimization to determine the globally optimal solution. Non-negativity constraints are introduced to ensure the physical plausibility of the BRDF model parameters, allowing the solutions of the kernel coefficients to remain physically meaningful and free from the interference of anomalous data; this is expected to balance the model complexity and physical consistency to derive high-quality BRDF parameter products. For cases in which the inversion fails in the main algorithm, the backup algorithm is enabled, which is designed to incorporate assumptions about the stability of surface reflectance characteristics along with prior knowledge to mitigate anomalies in the BRDF parameter fitting caused by insufficient observations. However, when the observations are affected by noise or errors introduced for atypical surfaces and extreme geometric conditions, the non-negative constraints on kernel coefficients in the main algorithm and the reliance on default parameters in the backup algorithm may simplify actual scattering contributions and surface anisotropy and lead to the forced assignment of zero values to volumetric or geometric scattering parameters.
In contrast, the MODIS BRDF operational algorithm retains advantages in current product evaluation and applications due to its longer history and multiple iterations of data versions. These advantages establish a robust foundation for MODIS data in diverse remote sensing applications and provide a benchmark for assessing the quality of future VIIRS BRDF parameter products.
5.2. Considerations for the Application of the BRDF Model Parameters Products
The semi-empirical kernel-driven BRDF model can effectively characterize the directional reflectance properties of the surface and facilitate rapid inversion, which remains a critical advantage for its sustained application to large-scale remote sensing datasets. However, the uncertainty issues associated with BRDF parameter products, as noted in this study, highlight the necessity for users to critically assess product quality and applicability in practical applications. For the estimation of derived indices that depend on spectral information, users should selectively utilize the products on the basis of the required accuracy in specific spectral bands, considering surface characteristics and the requirements of the application (e.g., vegetation index calculation or soil reflectance analysis), while avoiding the indiscriminate use of low-quality parameters. Specifically, it is recommended to prioritize data with a QA value of zero from the mandatory quality layer of the A1 products (MCD43A1 and VNP43IA1), as these retrievals are based on sufficient multi-angle observations and represent high-confidence results. For applications requiring stricter quality control or higher accuracy, users are further encouraged to incorporate the detailed quality information from the A2 products (MCD43A2 and VNP43IA2). Similar to A1, the A2 products use QA values ranging from 0 to 3, with lower values indicating better retrieval quality. We recommend selecting data with the lowest possible QA values (i.e., high-quality data) to ensure reliable results. When broader spatial and temporal coverage is prioritized, users should utilize the comprehensive quality classification provided by the A2 products to balance data availability with quality considerations. This flexible approach allows users to tailor their data selection strategies according to specific application needs and precision requirements.
In particular, the estimation of surface structural parameters, which depends on directional reflection information, requires sufficient coverage of a certain direction by multi-angle observations and sufficient BRDF information transferred from observations to simulations, both of which significantly affect the accuracy of BRDF modeling and parameter estimation. Typical directional reflectance contains rich surface structural and physiological information, which can be used for the classification and identification of surface features and estimation of vegetation structure and biochemical parameters. However, the application of typical directional reflectance, especially hotspot reflectance, is limited by the significant underestimation of the hotspot signature reconstructed by the RTLSR model, so Jiao et al. added the hotspot parameter to the volumetric scattering kernel to address this problem [
17]. This approach is ineffective for pixels with kernel coefficients set to zero because the corresponding kernel functions cannot contribute to reconstructing the BRDF shape or simulating hotspot reflectance. It is almost impossible to set
fvol and
fgeo to zero simultaneously, so the RossThick-LiSparseReciprocal_Chen (RTLSR_C) model with hotspot signature corrections for both volumetric and geometric-optical scattering kernels is a potential solution [
46]. In this model, the hotspot-corrected geometric-optical kernels remain effective even when
fvol is set to zero, thereby improving the accuracy of hotspot reconstruction. However, the actual effectiveness of this method requires comprehensive validation.
In addition, BRDF parameter products have been obtained continuously, and the considerable overlap between MODIS and VIIRS offers valuable opportunities for cross-sensor data integration. BRDF parameters are not directly measurable, making direct cross-sensor data fusion challenging. However, these parameters can be used to derive many physically meaningful measurable parameters (e.g., surface reflectance and albedo), which serve as intermediaries for developing a fusion framework that leverages extensive data sources and integrates data models to ensure cross-sensor product consistency. The integration of cross-sensor data is crucial for ecological monitoring, climate change research, and the continuity of long-term remote sensing datasets. On the one hand, integrating the long-term observation records of MODIS and VIIRS can reduce the occasional observation interruptions in single-sensor observations and expand the temporal continuity of data coverage. On the other hand, integrated and optimized cross-sensor data can offer more reliable remote sensing parameter estimates for global change studies, vegetation dynamics monitoring, and surface energy balance estimation. In the future, with the deployment of increasingly advanced sensors, cross-sensor data fusion will further increase the accuracy and expand the applicability of remote sensing products.
6. Conclusions
This study systematically analyzes the differences between MODIS and VIIRS BRDF parameter products, emphasizing the spatiotemporal variability of the differences in BRDF parameters and their derived indices. Two questions are explored: what differences exist in the BRDF parameter products, and how these differences potentially affect the derived index estimation. The comparison of MODIS and VIIRS BRDF parameter products reveals that fiso, which characterizes isotropic scattering and represents the reflectances in the direction of nadir view and nadir sun, is in highly consistent among the three BRDF parameters, with rRMSE = 33.37% in the red band and rRMSE = 19.78% in the NIR band; however, the fvol and fgeo, which characterize anisotropic scattering and angular patterns, differ significantly across sensor products. Thus, the differences in the input data affect the cross-sensor consistency of the surface-derived indices estimated from the BRDF parameters in a hierarchical way, with albedo being the least affected, followed by reflectance, whereas NDHD is more affected due to its sensitivity to surface anisotropy (e.g., in the red band, the rRMSE for albedo is less than 30%, and typical directional reflectance is more than 30% but less than 40%, whereas the rRMSE for NDHD is 53.32%).
In addition, zero-valued pixels in the fvol and fgeo layers are widespread and have periodic fluctuations in both the MODIS and VIIRS data, which are especially significant in certain land cover types and bands. However, VIIRS has a higher proportion of zero-valued pixels in the BRDF parameter product statistics than MODIS, which is more significant in the red band. This not only affects the quality of VIIRS data but is also likely to affect its reliability in various environmental remote sensing applications, such as ecological monitoring and vegetation angular index inversion. To clarify the potential impact of BRDF parameters on the estimation of derived indices, NDHD is used as an example to examine the sensitivity of different BRDF parameters to NDHD variations and investigate how the distribution of zero-valued pixels in key parameters affects NDHD estimation. The findings indicate that fiso and fvol exhibit the greatest sensitivity to NDHD variations, whereas the presence of zero-valued pixels in the fvol layer significantly increases uncertainty in NDHD estimation, thereby inevitably having an influence on the accurate inversion of vegetation structure parameters, such as the clumping index (CI); in theory, this is because the CI is linearly related to the NDHD in the multi-angular inversion algorithm. This reveals the necessity that the CI-NDHD algorithm must be adjusted and optimized when used in generating a high-quality VIIRS CI product.
In summary, this study focuses on vegetation angular index estimation to analyze the differences and potential issues in BRDF products. Given that BRDF products serve as important input data in a direct or indirect way for certain studies, these possible problems should be fully considered and resolved. Therefore, we suggest prioritizing BRDF parameter product quality, conducting cross-sensor consistency assessment of MODIS and VIIRS data, and exploring their synergistic integration to develop high-quality, cross-sensor-consistent datasets. These efforts will contribute to advancing the theoretical framework for cross-sensor product consistency assessment and enhancing data reliability in long-term global environmental monitoring and climate change research.



 ,
, 









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}