
Direct Comparison of Infrared Channel Measurements by Two ABIs to Monitor Their Calibration Stability


Abstract

1. Introduction
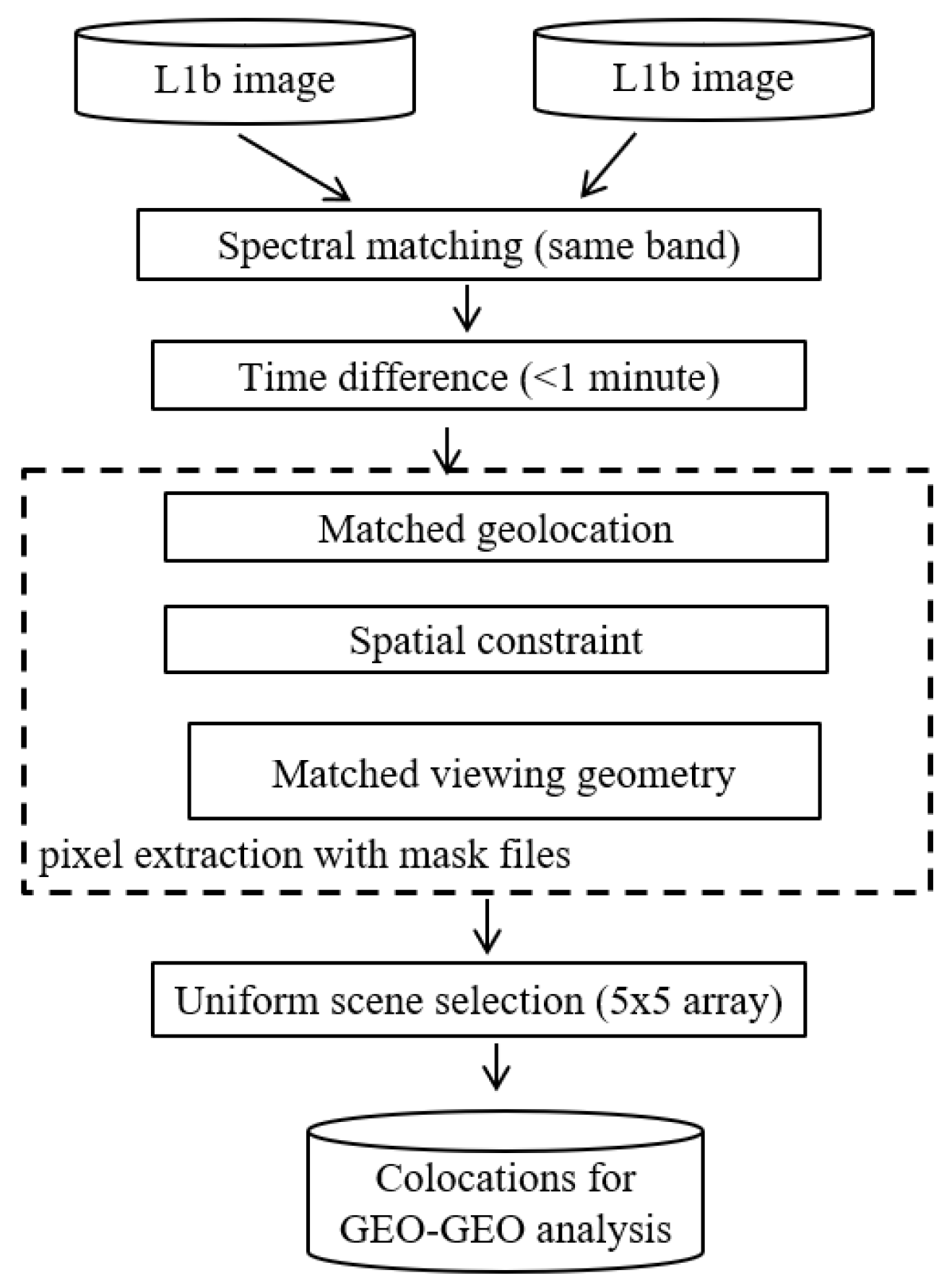
2. Algorithm of GEO-GEO Inter-Comparison
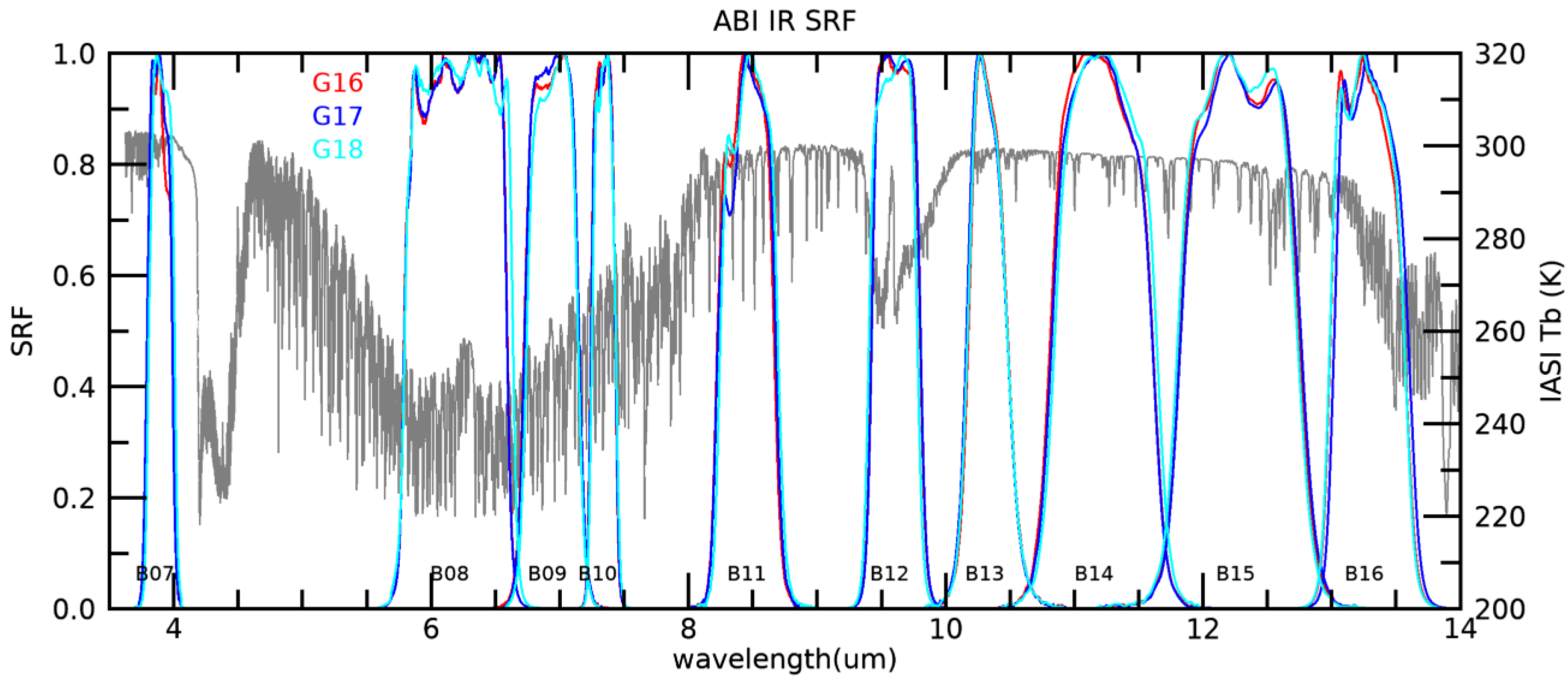
2.1. Spectral Matching
2.2. Temporal Matching
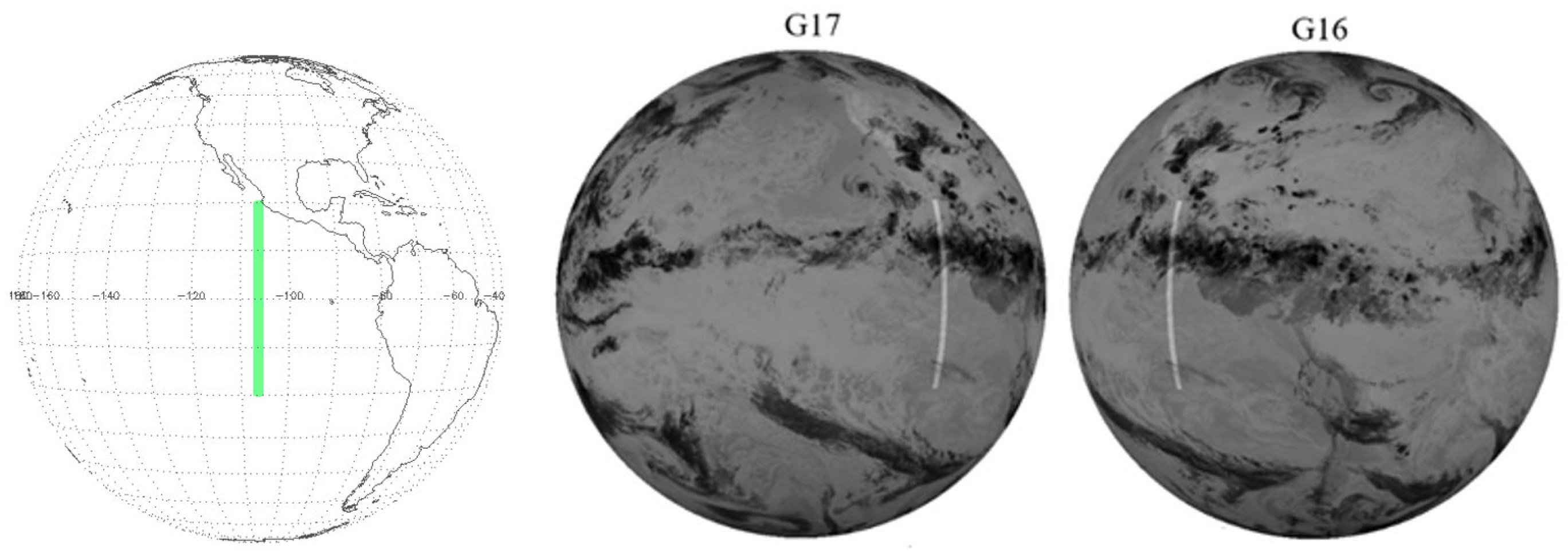
2.3. Geolocation Matching
2.4. Spatial Constraint
2.5. Viewing Zenith Matching
2.6. Uniformity
2.7. Tb Difference at Equivalent Brightness Temperature 300 K
3. Characteristics of GEO-GEO Inter-Comparison
3.1. Temperature Range
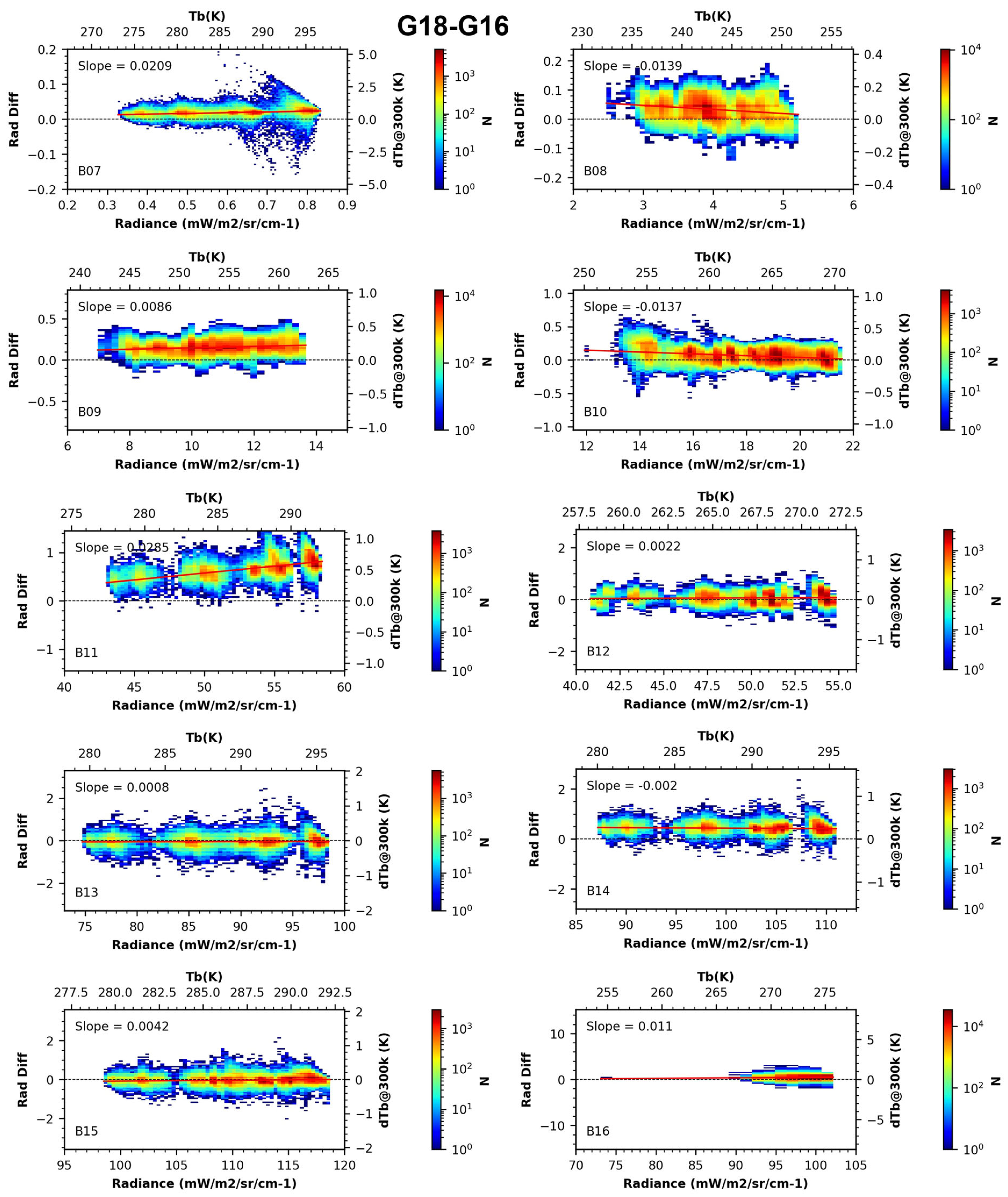
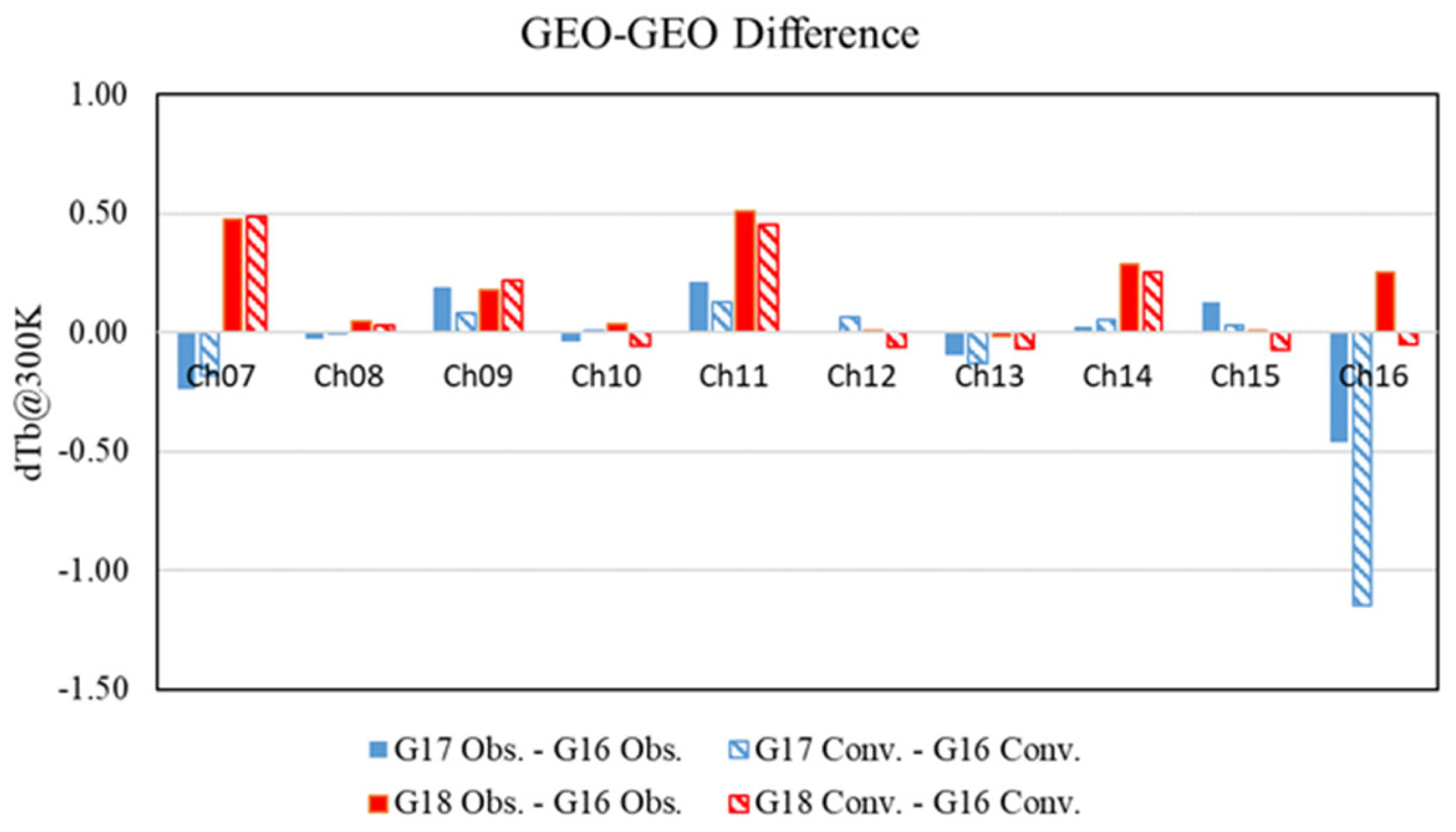
3.2. Mean Differences
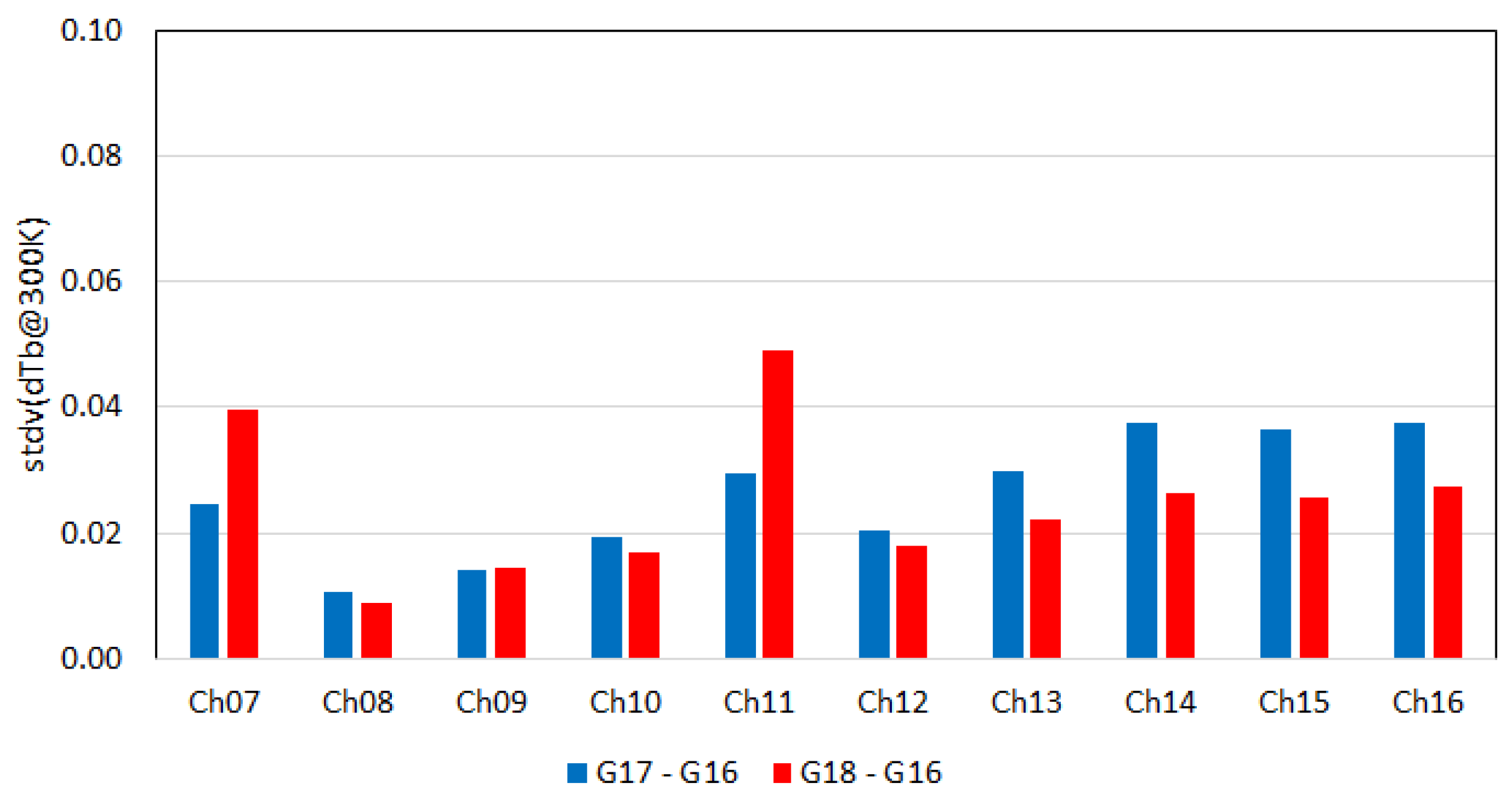
3.3. Uncertainty
4. Applications of GEO-GEO Comparisons
4.1. Monitoring Calibration in near Real Time
4.2. Revising Calibration Algorithm
4.3. Improving Calibration Operation
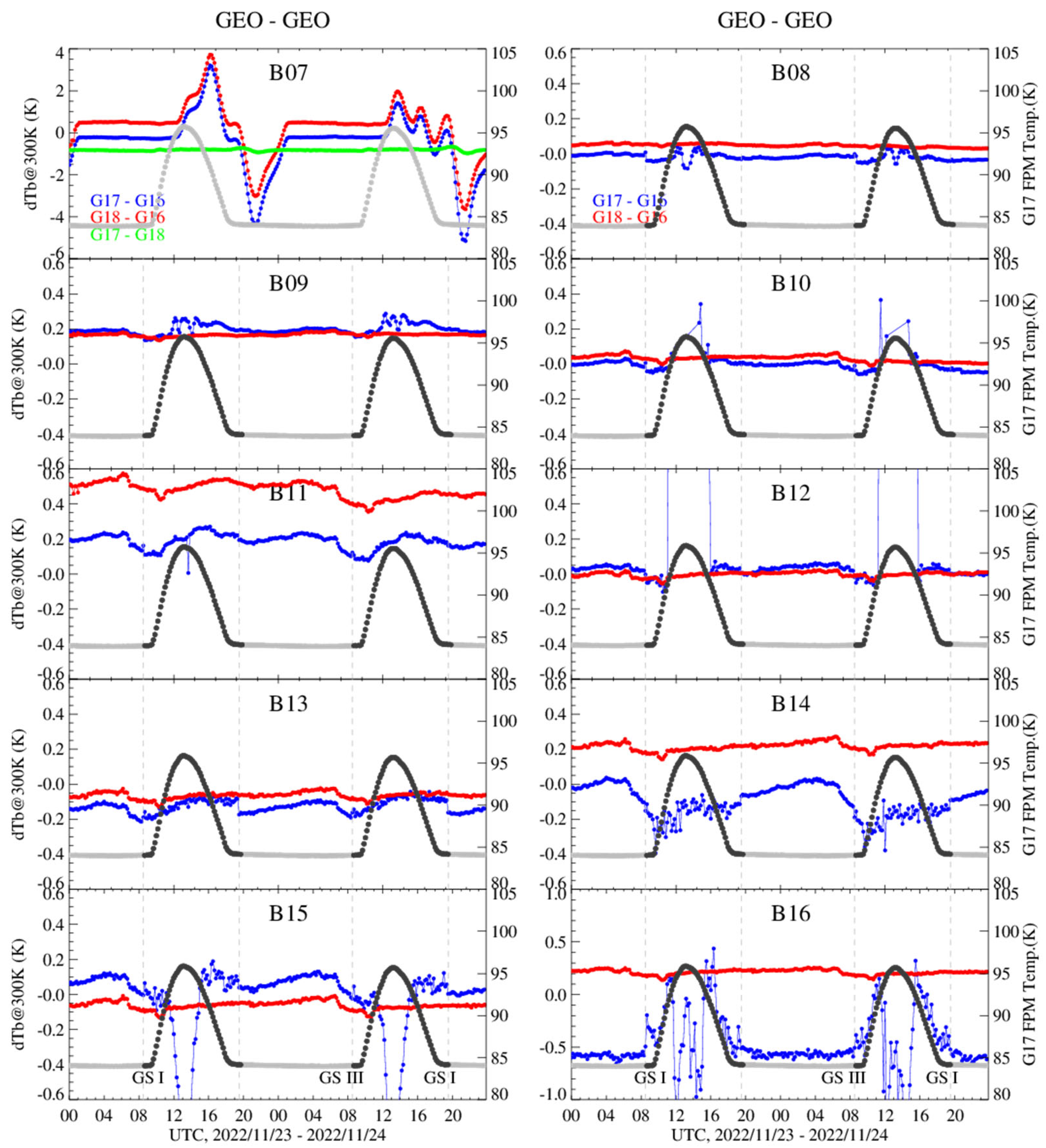
4.4. Detecting Calibration Anomalies
4.5. Assessing Calibration Stability
5. Summary and Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Uniformity Considerations
Appendix A.1. Displacement Due to Parallax
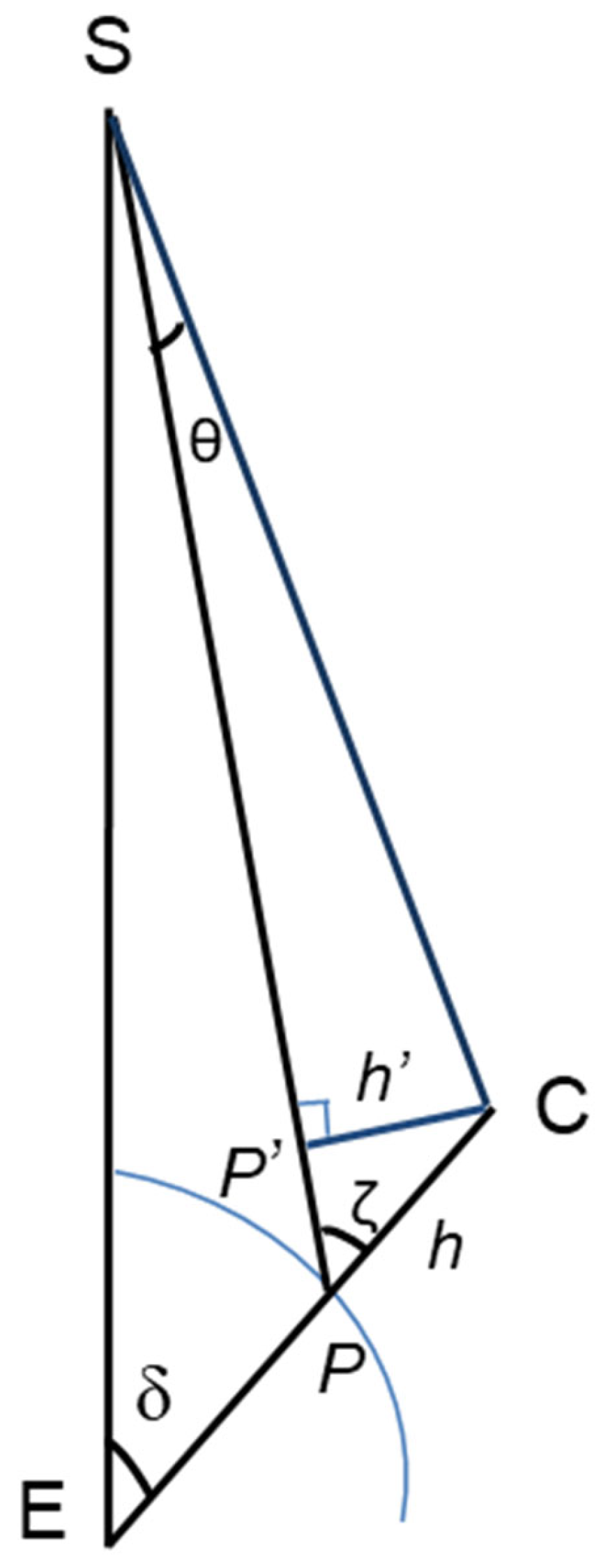
Appendix A.2. Displacement Due to Atmospheric Refraction
References
- GOES-R Product Algorithm Theoretical Basis Documents (ATBDS). Available online: https://www.goes-r.gov/resources/docs.html (accessed on 5 May 2025).
- Kalluri, S.; Alcala, C.; Carr, J.; Griffith, P.; Lebair, W.; Lindsey, D.; Race, R.; Wu, X.; Zierk, S. From photons to pixels: Processing data from the Advanced Baseline Imager. Remote Sens. 2018, 10, 177. [Google Scholar] [CrossRef]
- Wu, X.; Hewison, T.; Tahara, Y. GSICS GEO-LEO inter-calibration: Baseline algorithm and early results. Proc. SPIE 2009, 7456, 745604-1–745604-12. [Google Scholar]
- Hewison, T.J.; Wu, X.; Yu, F.; Tahara, Y.; Hu, X.; Kim, D.; Koenig, M. GSICS inter-calibration of infrared channels of Geostationary Imagers using Metop/IASI. IEEE Trans. Geosci. Remote Sens. 2013, 51, 1160–1170. [Google Scholar] [CrossRef]
- Yu, F.; Wu, X.; Yoo, H.; Qian, H.; Shao, X.; Wang, Z.; Iacovazzi, R. Radiometric calibration accuracy and stability of GOES-16 ABI Infrared radiance. J. Appl. Remote Sens. 2021, 15, 048504. [Google Scholar] [CrossRef]
- Daniels, J.M.; Schmit, T.J. NESDIS 103 GOES-11 Imager and Sounder Radiance and Product Validations for the GOES-11 Science Test; NESDIS 103; U.S. Department of Commerce National Oceanic and Atmospheric Administration: Washington, DC, USA, 2001. [Google Scholar]
- Hillger, D.W.; Schmit, T.J.; Daniels, J.M. The GOES-12 Science Test: Imager and Sounder Radiance and Product Validations. NOAA Technical Report NESDIS 115. 2002. Available online: https://rammb.cira.colostate.edu/research/calibration_validation_and_visualization/docs/GOES-12-TechReport.pdf (accessed on 5 May 2025).
- Hillger, D.W.; Schmit, T.J. The GOES-13 Science Test: Imager and Sounder Radiance and Product Validations. NOAA Technical Report NESDIS 125. 2007. Available online: https://rammb.cira.colostate.edu/projects/goes-n/NOAA_Tech_Report_NESDIS_125_GOES-13_Science_Test.pdf (accessed on 5 May 2025).
- Hillger, D.W.; Schmit, T.J. The GOES-14 Science Test: Imager and Sounder Radiance and Product Validations. NOAA Technical Report NESDIS 131. 2010. Available online: https://rammb.cira.colostate.edu/projects/goes-o/NOAA_Tech_Report_NESDIS_131_GOES-14_Science_Test_with_Corrigendum.pdf (accessed on 5 May 2025).
- Hillger, D.W.; Schmit, T.J. The GOES-15 Science Test: Imager and Sounder Radiance and Product Validations. NOAA Technical Report NESDIS 141. 2011. Available online: https://rammb.cira.colostate.edu/projects/goes-p/noaa_technical_report_141_goes-15_science_test.pdf (accessed on 5 May 2025).
- Johnson, R.X.; Weinreb, M.P. GOES-8 imager midnight effects and slope correction. In GOES-8 and Beyond; Washwell, E.R., Ed.; SPIE: Bellingham, WA, USA, 1996; Volume 2812, pp. 596–607. [Google Scholar]
- Hewison, T.; Wagner, S. Can We Modify GSICS GEO-LEO IR ATBD to Apply to GEO-GEO Inter-Comaprisons? GSICS IR Subgroup Meeting. 17 October 2019. Available online: https://gsics.atmos.umd.edu/bin/view/Development/20191017 (accessed on 5 May 2025).
- Yu, F.; Wu, X.; Rama Varma Raja, M.K.; Wang, L.; Li, Y.; Goldberg, M. Evaluation of the diurnal and scan angle calibration variations of the GOES Imager Infrared instruments. IEEE Trans. Geosci. Remote Sens. 2013, 51, 671–683. [Google Scholar] [CrossRef]
- Wu, X.; Schmit, T.J. Product Performance Guide for Data Users of GOES-16 ABI Level1b (L1b) and Cloud and Moisture Imagery (CMI) Released for Full Validation Data Quality. NOAA Satellite Information System. 2019. Available online: https://www.ncei.noaa.gov/sites/default/files/2021-08/GOES-16_ABI-L1b-CMI_Full-Validation_ProductPerformanceGuide_v2.pdf (accessed on 5 May 2025).
- Van Naarden, J.; Lindsey, D. Saving GOES-17. Aerospace America. 2019. Available online: https://aerospaceamerica.aiaa.org/departments/saving-goes-17/ (accessed on 5 May 2025).
- McCorkel, J.; Van Naarden, J.; Lindsey, D.; Efremova, B.; Coakley, M.; Black, M.; Krimchansky, A. GOES-17 Advanced Baseline Imager performance recovery summary. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019. [Google Scholar] [CrossRef]
- Wang, Z.; Wu, X.; Yu, F.; Fulbright, J.; Kline, E.; Yoo, H.; Schmit, T.; Gunshor, M.; Coakley, M.; Black, M.; et al. On-orbit calibration and characterization of GOES-17 ABI IR bands under dynamic thermal condition. J. Appl. Remote Sens. 2020, 14, 034527. [Google Scholar] [CrossRef]
- Murata, H.; Yogo, Y.; Takahashi, M. Himawari-8/9 AHI GEO-GEO comparisons. In Proceedings of the GSICS Annual Meeting, Shanghai, China, 19–23 March 2018; Available online: http://gsics.atmos.umd.edu/bin/view/Development/20180319 (accessed on 5 May 2025).
- Minnis, P.; Khaiyer, M. Anisotropy of land surface skin temperature derived from satellite data. J. Appl. Meteorol. Climatol. 2020, 39, 1117–1129. [Google Scholar] [CrossRef]
- Yu, F.; Wu, X.; Yoo, H.; Wang, Z. GEO-GEO inter-comparison for G17 IR radiance monitoring and anomaly detection. In Proceedings of the GSICS Annual Meeting, Frascati, Italy, 4–8 March 2019. [Google Scholar]
- Yoo, H.; Yu, F.; Wu, X. Evaluation of radiometric calibration consistency of GOES-17 ABI using GEO-GEO collocations. In Proceedings of the AGU Fall Meeting, Washington, DC, USA, 10–14 December 2018. [Google Scholar]
- Yoo, H.; Yu, F.; Wu, X. GEO-GEO inter-comparison as a tool for ABI performance validation and monitoring. In Proceedings of the AMS Conference, Boston, MA, USA, 16 January 2020. [Google Scholar]
- Wu, X.; Yu, F. Correction for GOES Imager spectral response functions using GSICS: Theory. IEEE Trans. Geosci. Remote Sens. 2013, 51, 1215–1223. [Google Scholar] [CrossRef]
- Yu, F.; Wu, X. Correction for GOES Imager spectral response functions using GSICS: Applications. IEEE Trans. Geosci. Remote Sens. 2013, 51, 1200–1214. [Google Scholar] [CrossRef]
- Gunshor, M.; Schmit, T.; Nelson, J.; Bachmeier, S. GOES-18 versus GOES-17 ABI. In Proceedings of the AMS 2023 Annual Meeting, Denver, CO, USA, 8–12 January 2023; Available online: https://ams.confex.com/ams/103ANNUAL/meetingapp.cgi/Paper/418091 (accessed on 5 May 2025).
- Shao, X.; Wu, X.; Yu, F.; Cao, C. Characterization and monitoring of GOES-16 ABI stray light and comparison with Himawari-8 AHI and GOES-17 ABI. J. Appl. Remote Sens. 2021, 15, 017503. [Google Scholar] [CrossRef]
- Xu, H.; Wu, X.; Yu, F. Characterize straylight in GOES ABI and Himawari AHI CH07. In Proceedings of the GSICS Annual Meeting, College Park, MD, USA, 27 February–3 March 2023; Available online: http://gsics.atmos.umd.edu/bin/view/Development/Gsicsannualmeeting2023/ (accessed on 5 May 2025).
- Yu, F.; Wu, X.; Xu, H.; Qian, H. GOES ABI IR midnight calibration variations. In Proceedings of the SPIE Proceeding, San Diego, CA, USA, 18–22 August 2024. [Google Scholar]
- Bennett, G.G. The Calculation of Astronomical Refraction in Marine Navigation. J. Navig. 1982, 35, 255–259. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Satellite | Launch | Operational | Nominal SSP | Actual SSP | Status |
|---|---|---|---|---|---|
| GOES-16 | 19 November 2016 | 18 December 2017–7 April 2025 | 75.0°W | 75.2°W 18 December 2017–17 March 2025; 75.5°W 17 March 2025–7 April 2025 | Storage |
| GOES-17 | 1 March 2018 | 12 February 2019–4 January 2023 | 137.0°W | 137.2°W (12 February 2019–15 July 2022) | Storage |
| 137.3°W (15 July 2022–4 January 2023) | |||||
| GOES-18 | 1 March 2022 | 4 January 2023 | 137.0°W | 137.0°W since 21 July 2022 | Operational |
| GOES-19 | 25 June 2024 | 7 April 2025 | 75.0°W | 75.2°W | Operational |
| Channel No. | Central Wavelength (µm) | Noise (NEdT at 300 K) (K) |
|---|---|---|
| Ch07 | 3.9 | 0.1 |
| Ch08 | 6.2 | 0.1 |
| Ch09 | 6.9 | 0.1 |
| Ch10 | 7.3 | 0.1 |
| Ch11 | 8.4 | 0.1 |
| Ch12 | 9.6 | 0.1 (0.12) |
| Ch13 | 10.3 | 0.1 |
| Ch14 | 11.2 | 0.1 |
| Ch15 | 12.3 | 0.1 |
| Ch16 | 13.3 | 0.3 (0.37) |
| Ch07 | Ch08 | Ch09 | Ch10 | Ch11 | Ch12 | Ch13 | Ch14 | Ch15 | Ch16 | |
|---|---|---|---|---|---|---|---|---|---|---|
| G16/G18 | 0.74 | 0.13 | 0.15 | 0.23 | 0.19 | 0.18 | 0.28 | 0.19 | 0.22 | 0.34 |
| G17 | 0.70 | 0.20 | 0.20 | 0.40 | 0.20 | 1.00 | 0.35 | 0.30 | 0.90 | 3.37 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, F.; Wu, X.; Yoo, H.; Xu, H.; Qian, H. Direct Comparison of Infrared Channel Measurements by Two ABIs to Monitor Their Calibration Stability. Remote Sens. 2025, 17, 1656. https://doi.org/10.3390/rs17101656
Yu F, Wu X, Yoo H, Xu H, Qian H. Direct Comparison of Infrared Channel Measurements by Two ABIs to Monitor Their Calibration Stability. Remote Sensing. 2025; 17(10):1656. https://doi.org/10.3390/rs17101656
Chicago/Turabian StyleYu, Fangfang, Xiangqian Wu, Hyelim Yoo, Hui Xu, and Haifeng Qian. 2025. "Direct Comparison of Infrared Channel Measurements by Two ABIs to Monitor Their Calibration Stability" Remote Sensing 17, no. 10: 1656. https://doi.org/10.3390/rs17101656
APA StyleYu, F., Wu, X., Yoo, H., Xu, H., & Qian, H. (2025). Direct Comparison of Infrared Channel Measurements by Two ABIs to Monitor Their Calibration Stability. Remote Sensing, 17(10), 1656. https://doi.org/10.3390/rs17101656