



ITS Efficiency Analysis for Multi-Target Tracking in a Clutter Environment

Abstract
1. Introduction
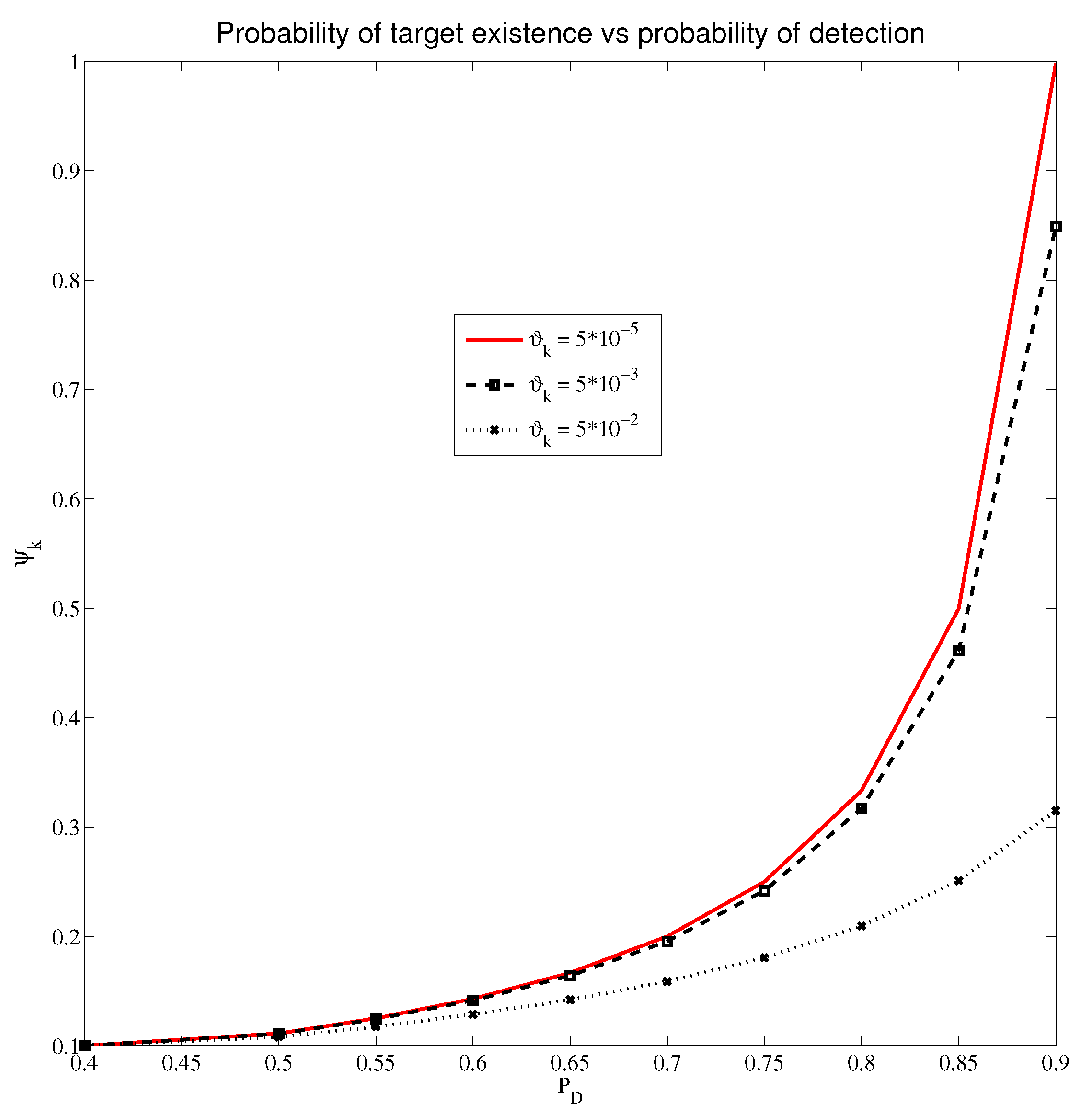
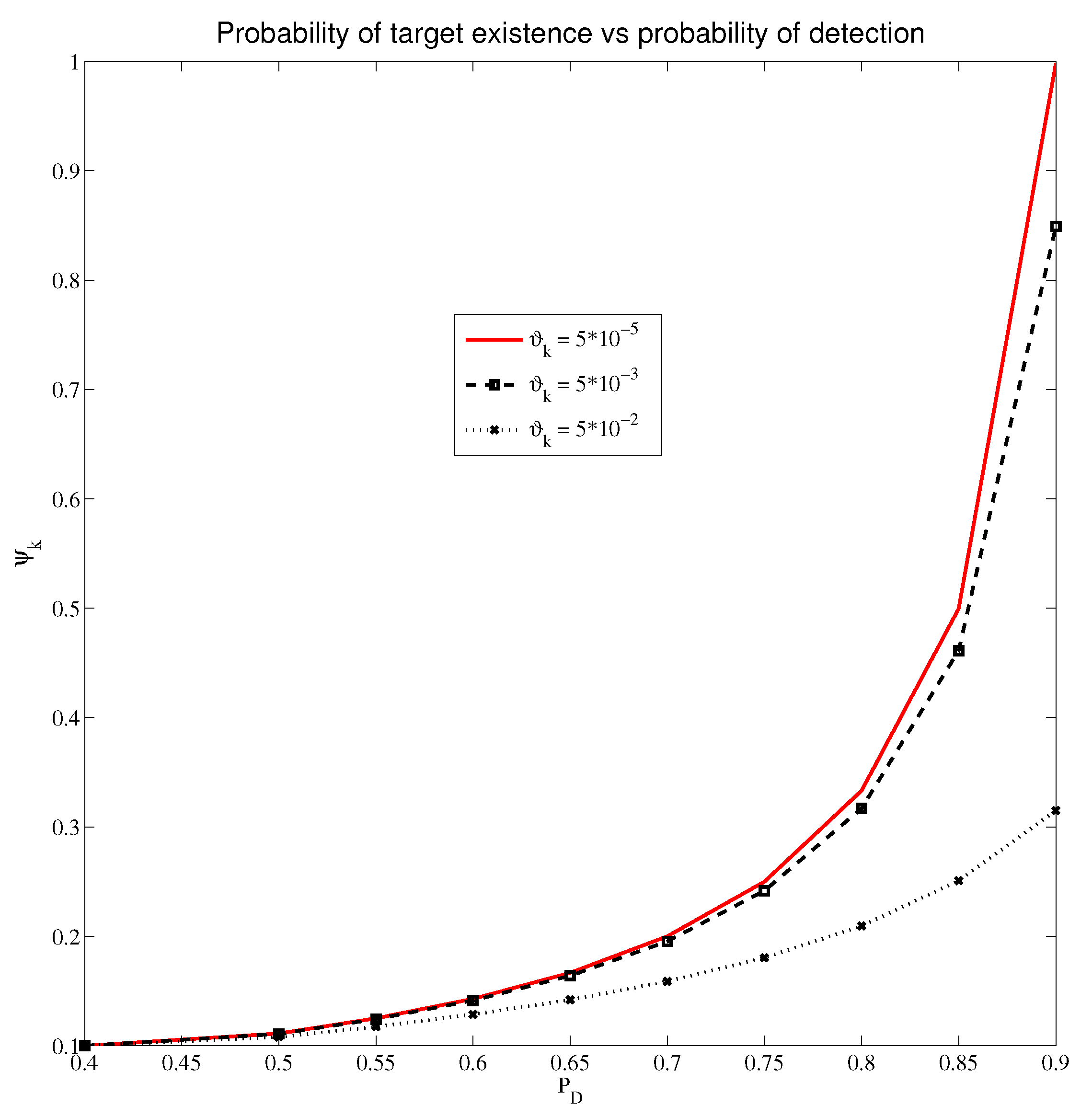
- A theoretical model of the dependence of the probability of target detection on the likelihood function (relative to the target existence probability) will be investigated for the well-known ITS algorithm, which has not been investigated in the literature so far;
- The theoretical results achieved should be proven practically, by numerical simulations, by obtaining probability of detection values that enable efficient tracking of a maneuvering target in a dense cluttered environment;
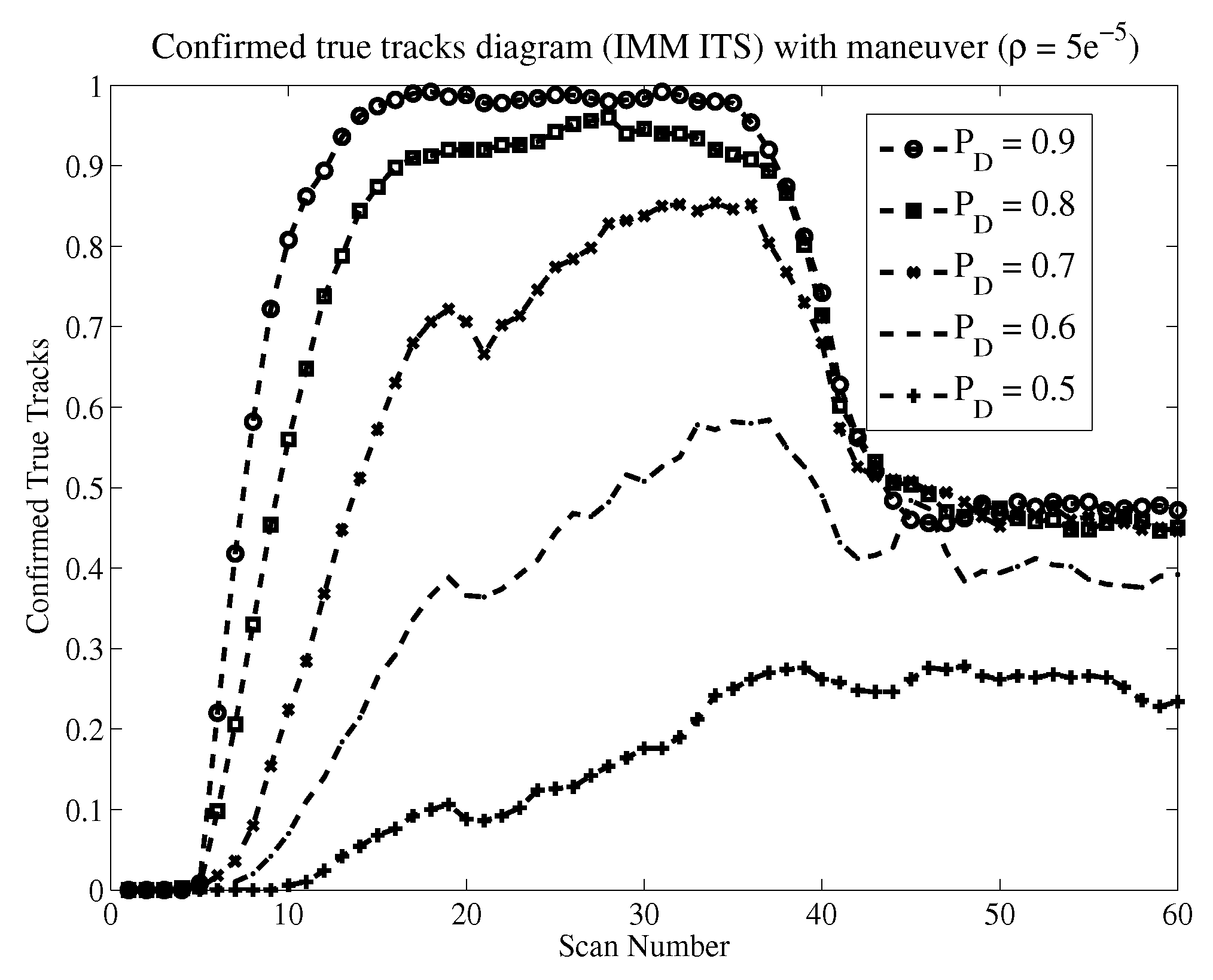
- To compare the obtained results, an efficient combined algorithm that successfully tracks maneuvering targets (IMMITS) was tested in parallel.
2. Assumptions and Models
- -the event that the track is following a target, i.e., that the target exists;
- -the event that the track is not following a target, i.e., that the target does not exist;
- -the event that the trajectory of the target uses model in the time interval between and k.
2.1. Target Measurements
2.2. Sensors
2.3. Clutter Measurements Model
3. Integrated Track Splitting Filter Approach
- if the value of is less than the threshold, the target does not exist and we terminate the track,
- if the value of is greater than the threshold, the target exists and the track is confirmed.
3.1. ITS Propagation
3.2. Measurements Selection
3.3. ITS Update
- probability of new component ,
- mean of new component , and
- covariance error of new component
3.4. ITS Algorithm: Analysis of Effectiveness
4. Interacting Multiple Model ITS Algorithm
Interacting Multiple Model ITS Approach
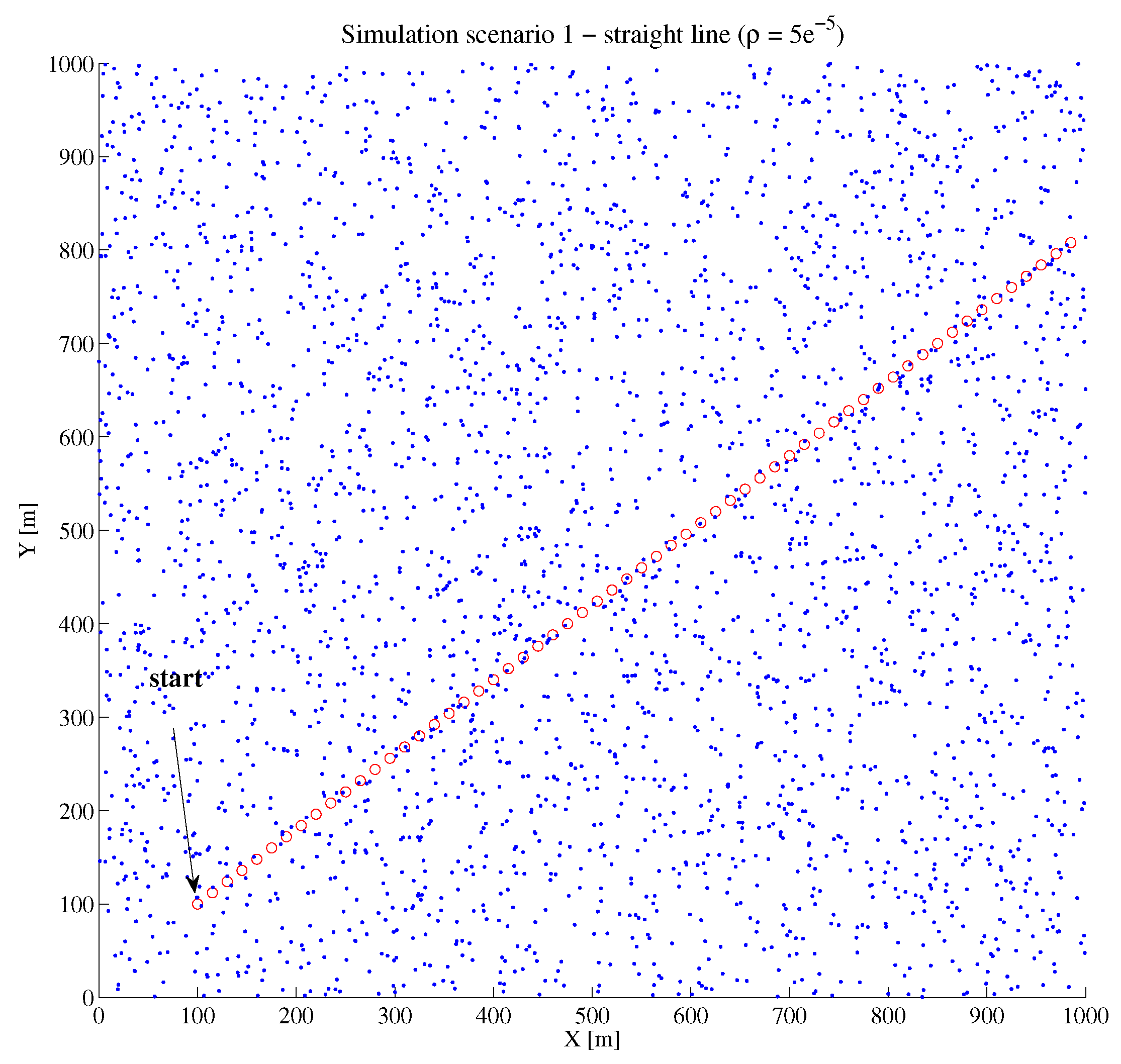
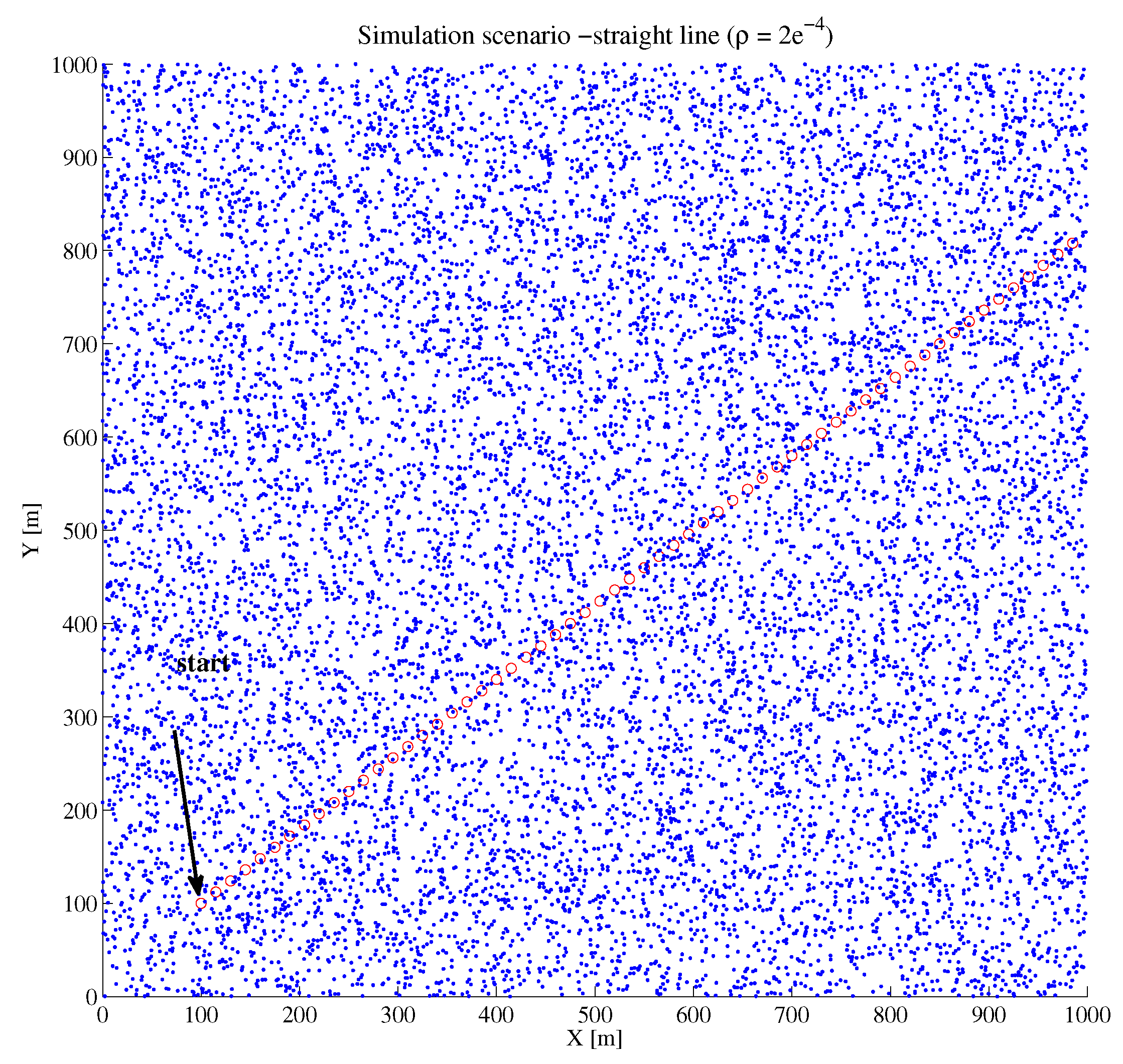
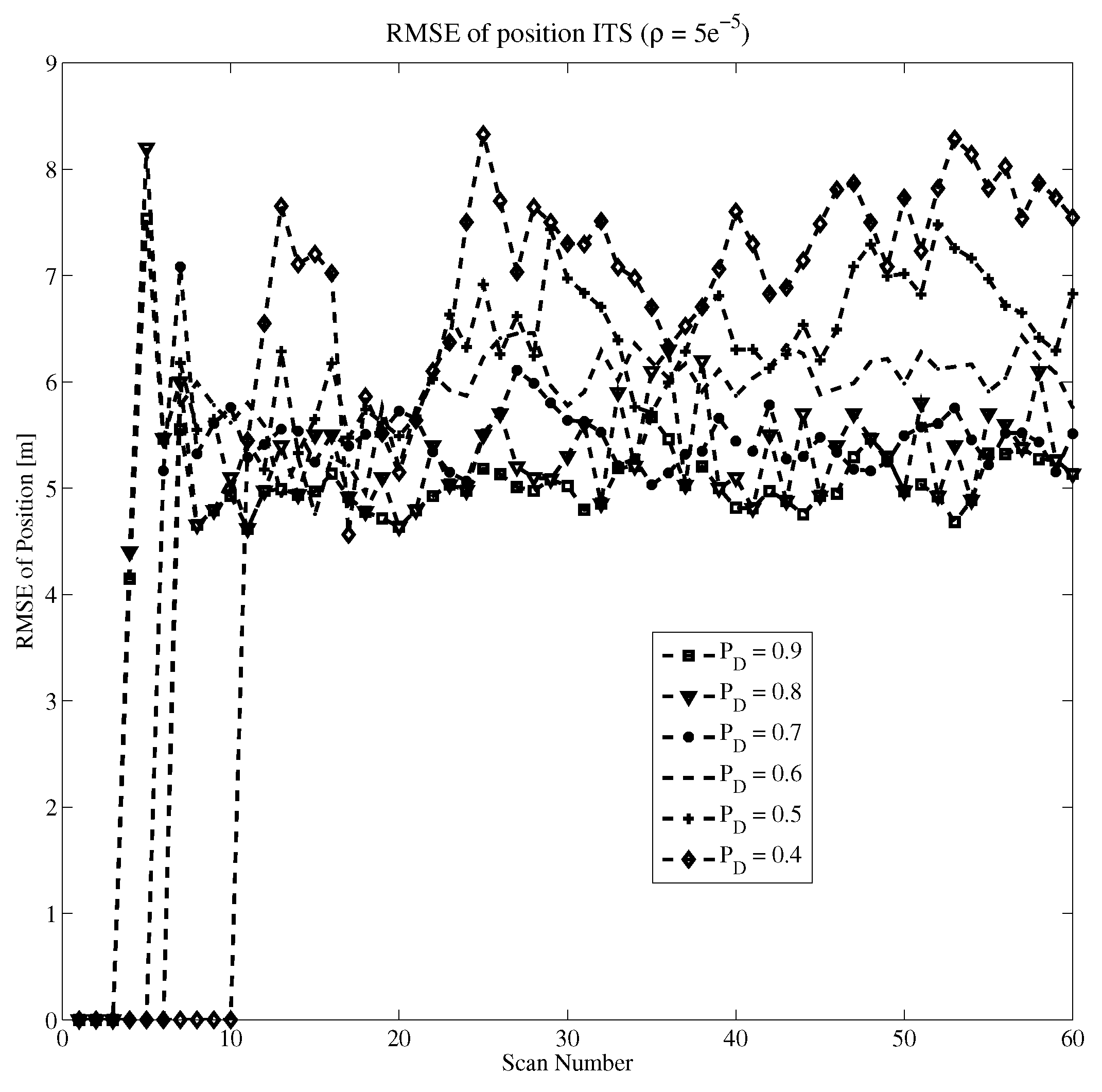
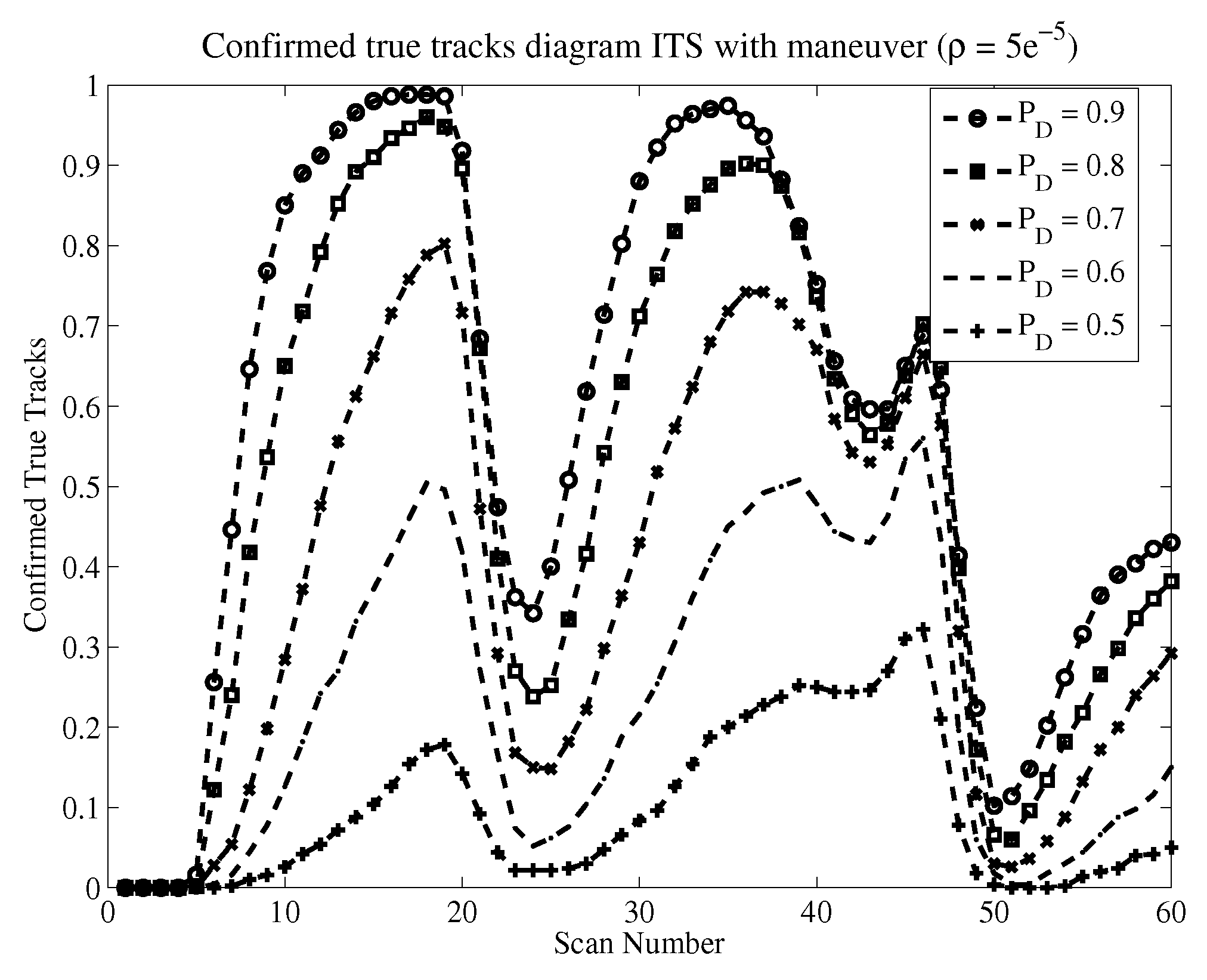
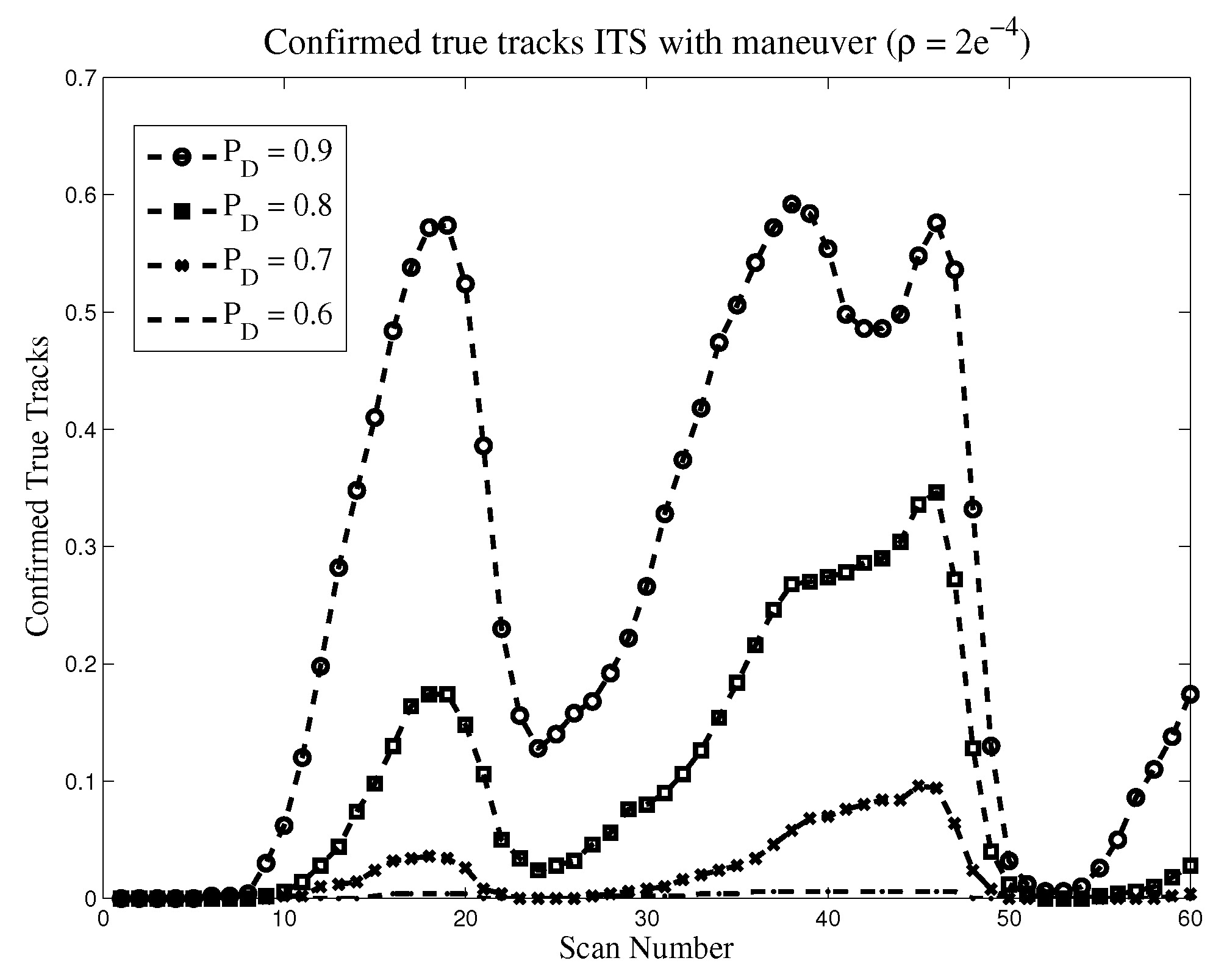
5. Simulations
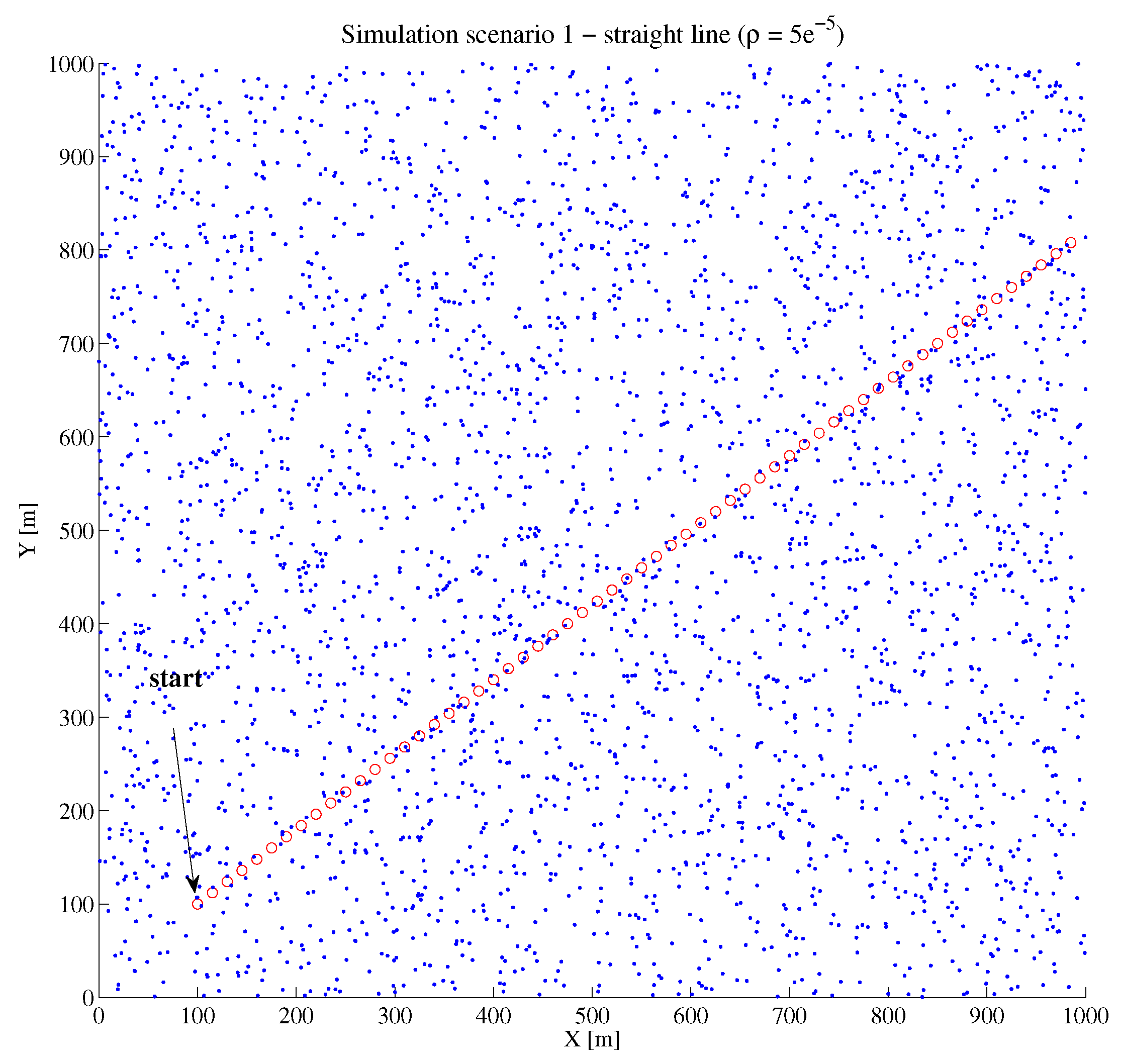
- Case 1: clutter density
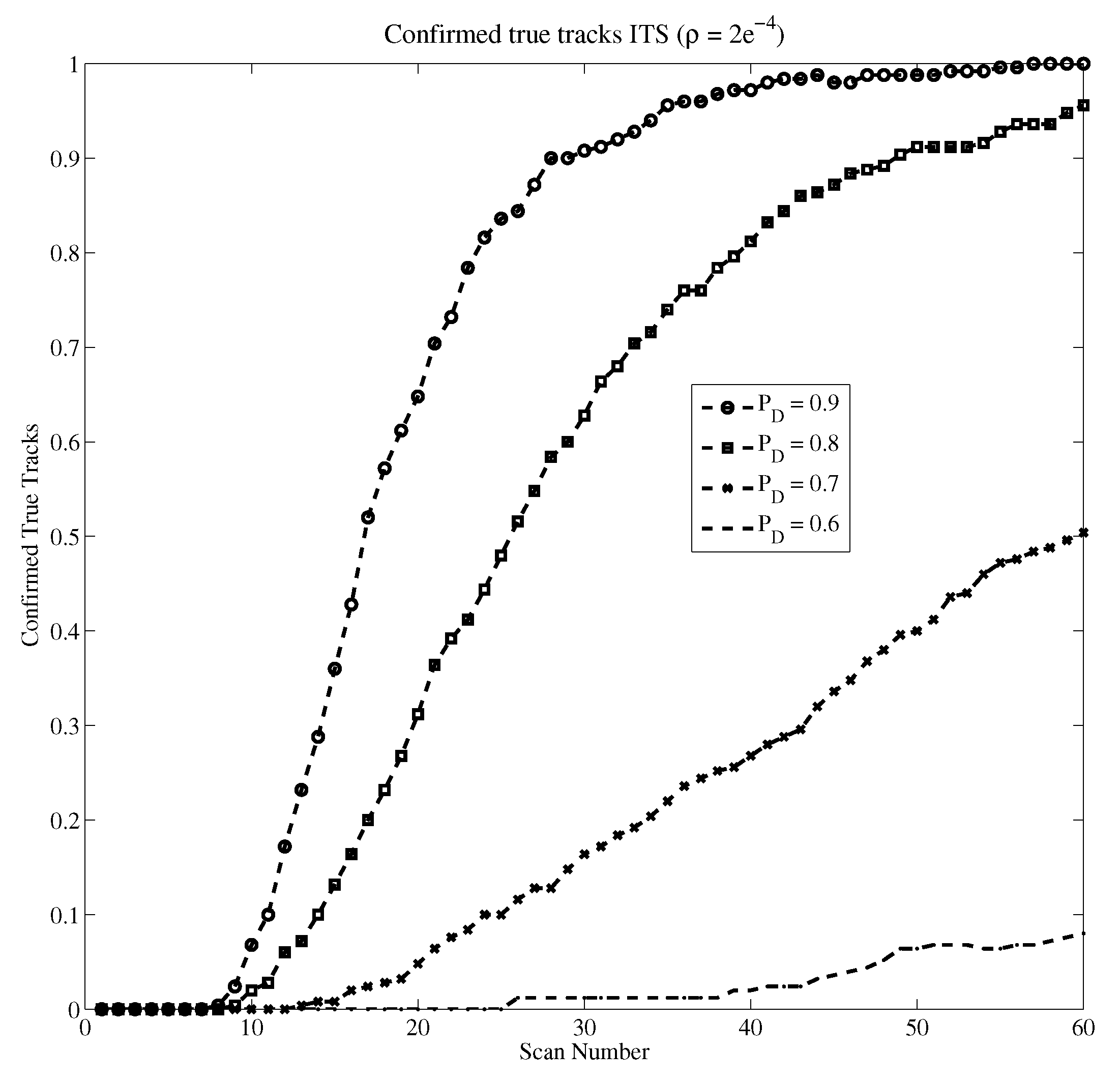
- Case 2: clutter density .
5.1. Results of Single Target Scenario
5.2. Results of Multi-Target Scenario
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| KF | Kalman Filter |
| UKF | Unscented Kalman Filter |
| EKF | Extended Kalman Filter |
| FTD | False Track Discrimination |
| GM | Gaussian Mixture |
| GMM | Gaussian Mixture measurements |
| GPB | Generalized Pseudo-Bayesian |
| PHD | Probability Hypotheses Density |
| Probability Density Function | |
| MHT | Multiple Hypotheses Testing |
| MTT | Multi-Target Tracking |
| STT | Single Target Tracking |
| IMM | Interacting Multiple Models |
| ITS | Integrated Track Splitting |
| JITS | Joint Integrated Track Splitting |
| LM ITS | Linear Multi-target Integrated Track Splitting |
| PF | Particle Filter |
| IPF | Integrated Particle Filter |
| PDA | Probabilistic Data Association |
| IPDA | Integrated Probabilistic Data Association |
| FIST | Finite Sets Statistics |
| RSS | Random Set Statistics |
| SMC | Sequential Monte Carlo |
| JIPDA | Joint Integrated Probabilistic Data Association |
| SPRT | Sequential Probability Ratio test |
References
- Blackman, S. Multiple-Target Tracking with Radar Applications; Artech House: Washington, DC, USA, 1986. [Google Scholar]
- Blackman, S.; Popoli, R. Design and Analysis of Modern Tracking Systems; Artech House: Washington, DC, USA, 1999. [Google Scholar]
- Reid, D.B. An algorithm for tracking multiple targets. IEEE Trans. Autom. Control 1979, 24, 843–854. [Google Scholar] [CrossRef]
- Kurien, T. Issues in the design of practical multitarget tracking algorithms. In Multitarget Multisensor Tracking; Bar-Shalom, Y., Ed.; Artech House: Washington, DC, USA, 1990; Volume 1, pp. 43–83. [Google Scholar]
- Challa, S.; Evans, R.; Morelande, M.; Mušicki, D. Fundamentals of Object Tracking; Cambridge University Press: Cambridge, UK, 2011. [Google Scholar]
- Mušicki, D.; Evans, R.; Stankovi’c, S. Integrated Probabilistic Data Association (IPDA). IEEE Trans. Autom. Control 1994, 9, 1237–1241. [Google Scholar] [CrossRef]
- Mušicki, D.; Evans, R. Joint Integrated Probabilistic Data Association-JIPDA. IEEE Trans. Aerosp. Electron. Syst. 2004, 40, 1093–1099. [Google Scholar] [CrossRef]
- Mušicki, D.; Scala, B.L. Multi-target tracking in clutter without measurement assignment. IEEE Trans. Aerosp. Electron. Syst. 2008, 44, 877–896. [Google Scholar] [CrossRef]
- Mušicki, D.; Suvorova, S. Tracking in clutter using IMM-IPDA based algorithms. IEEE Trans. Aerosp. Electron. Syst. 2007, 44, 111–126. [Google Scholar] [CrossRef]
- Bar-Shalom, Y.; Tse, E. Tracking in a cluttered environment with Probabilistic Data Association. Automatica 1975, 11, 451–460. [Google Scholar] [CrossRef]
- Mušicki, D.; La Scala, B.; Evans, R. The Integrated Track Splitting filter—Efficient multi-scan single target tracking in clutter. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 1409–1425. [Google Scholar]
- Mušicki, D.; Evans, R. Multi-scan multi-target tracking in clutter with Integrated Track Splitting filter. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 1432–1447. [Google Scholar] [CrossRef]
- Bar-Shalom, Y.; Li, X.R.; Kirubarajan, T. Estimation with Application to Tracking and Navigation; John Wiley and Sons: Hoboken, NJ, USA, 2001. [Google Scholar]
- Julier, S.J.; Uhlmann, J.K. Unscented filtering and nonlinear estimation. Proc. IEEE 2004, 92, 401–422. [Google Scholar] [CrossRef]
- Julier, S.J.; Uhlmann, J.K.; Durrant-Whyte, H. A new method for nonlinear transformation of means and covariances in filters and estimators. IEEE Trans. Autom. Control 2000, 45, 477–482. [Google Scholar] [CrossRef]
- Alspach, D.L.; Sorenson, H.W. Nonlinear bayesian estimation using gaussian sum approximation. IEEE Trans. Autom. Control 1972, 17, 439–448. [Google Scholar] [CrossRef]
- Alspach, D.L. A gaussian sum approach to the multitarget identification-tracking problem. Automatica 1975, 11, 285–296. [Google Scholar] [CrossRef]
- Mušicki, D.; Song, T.L.; Kim, W.C.; Nexsxić, D. Non-linear automatic target tracking in clutter using dynamic Gaussian mixture. IET Radar, Sonar Navig. 2013, 6, 937–944. [Google Scholar] [CrossRef]
- Mušicki, D. Bearings only single-sensor target tracking using Gaussian mixtures. Automatica 2009, 45, 2088–2092. [Google Scholar] [CrossRef]
- Ristić, B.; Arulampalam, S.; Gordon, N. Beyond the Kalman Filter; Artech House: Washington, DC, USA, 2004. [Google Scholar]
- Li, Q.; Gan, R.; Liang, J.; Godsill, S. An Adaptive and Scalable Multi-object Tracker based on the Non-homogeneous Poisson Process. IEEE Trans. Signal Process. 2023, 71, 105–120. [Google Scholar] [CrossRef]
- Granstrom, K.; Fatemi, M.; Svensson, L. Poisson multi-Bernoulli mixture conjugate prior for multiple extended target filtering. IEEE Trans. Aerosp. Electron. Syst. 2019, 56, 208–225. [Google Scholar] [CrossRef]
- Marrs, A.; Maskell, S.; Bar-Shalom, Y. Expected likelihood for tracking in clutter with Particle Filters. In Proceedings of the SPIE: Signal and Data Processing of Small Targets, Orlando, FL, USA, 9 July 2002; Volume 4728, pp. 230–239. [Google Scholar]
- Morelande, M.R.; Mušicki, D. Fast multiple target tracking using particle filters. In Proceedings of the 44th IEEE Conference on Decision and Control, CDC 2005, Seville, Spain, 12–15 December 2005; pp. 530–535. [Google Scholar]
- Vo, B.N.; Ma, W.M. The Gaussian mixture Probability Hypothesis Density filter. IEEE Trans. Signal Process. 2006, 54, 4091–4104. [Google Scholar] [CrossRef]
- Song, T.L.; Mušicki, D.; Kim, D.S.; Radosavljević, Z. Gaussian mixtures in multi-target tracking: A look at Gaussian Mixture Probability Hypothesis Density and Integrated Track Splitting. IET Proc. Radar, Sonar Navig. 2012, 6, 359–364. [Google Scholar] [CrossRef]
- Papoulis, A. Probability, Random Variables and Stochastic Processes; McGraw-Hill: New York, NY, USA, 1965. [Google Scholar]
- Radosavljević, Z.; Mušicki, D. Limits of target tracking in heavy clutter. In Proceedings of the ASIA-Pacific International Conference of Synthetic Aperture Radar APSAR 2011, Seoul, Republic of Korea, 26–30 September 2011. [Google Scholar]
- Radosavljević, Z.; Mušicki, D.; Kovacevixcx, B.; Kim, W.C.; Song, T.L. Integrated Particle Filter for Target Tracking. In Proceedings of the International Conference on Electronics, Information and Communications (ICEIC 2014), Kota Kinabalu, Malesya, 15–18 January 2014. [Google Scholar]
- Luan, Z.; Gu, B.; Wang, J. A Real-time Interactive Multi-Model (RT-IMM) Target Tracking Method. In Proceedings of the 2021 IEEE International Conference on Artificial Intelligence and Computer Applications (ICAICA), Dalian, China, 28–30 June 2021; pp. 503–507. [Google Scholar] [CrossRef]
- Zhou, G.; Zhu, B.; Ye, X. Switch-Constrained Multiple-Model Algorithm for Maneuvering Target Tracking. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 4414–4433. [Google Scholar] [CrossRef]
- Jiao, H.; Liu, Y.; Yan, J.; Liu, H. A Refined Tracking Filtering Algorithm Based on IMM. In Proceedings of the 12th International Conference on Control, Automation and Information Sciences (ICCAIS), Hanoi, Vietnam, 27–29 November 2023; pp. 645–650. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ↓→ | 0.9 | 0.8 | 0.7 | 0.6 | 0.5 | 0.4 | |
|---|---|---|---|---|---|---|---|
| ITS | 1.60 | 1.82 | 1.89 | 2.31 | 2.61 | 2.83 | |
| IMMITS | 2.46 | 2.68 | 3.19 | 4.10 | 4.56 | 5.05 | |
| ITS | 14.8 | 16.2 | 17.0 | 17.4 | - | ||
| IMMITS | 24.8 | 28.2 | 32.3 | 35.1 | - |
| ↓→ | 0.9 | 0.8 | 0.7 | 0.6 | 0.5 | |
|---|---|---|---|---|---|---|
| ITS | 1.84 | 2.06 | 2.23 | 2.7 | 3.0 | |
| IMMITS | 2.51 | 2.96 | 3.44 | 4.51 | 5.16 | |
| ITS | 15.9 | 17.2 | 17.8 | 19.1 | - | |
| IMMITS | 24.6 | 29.35 | 36.9 | 46.5 | - |
| ↓→ | 0.9 | 0.8 | 0.7 | 0.6 | 0.5 | 0.4 | |
|---|---|---|---|---|---|---|---|
| ITS | 4.04 | 4.8 | 5.02 | 5.33 | 5.73 | 5.9 | |
| IMMITS | 4.88 | 5.28 | 5.94 | 6.31 | 6.56 | 6.68 | |
| ITS | 4.34 | 4.64 | 4.43 | 4.12 | - | - | |
| IMMITS | 4.98 | 5.49 | 5.93 | 3.09 | - | - |
| ↓→ | 0.9 | 0.8 | 0.7 | 0.6 | 0.5 | |
|---|---|---|---|---|---|---|
| ITS | 10.04 | 11.04 | 11.0 | 10.6 | 10.1 | |
| IMMITS | 9.74 | 10.6 | 10.7 | 10.6. | 10.2 | |
| ITS | 10.5 | 8.96 | 7.24 | 2.67 | - | |
| IMMITS | 10.0 | 10.3 | 8.58 | 2.60 | - |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Radosavljević, Z.; Ivković, D.; Kovačević, B. ITS Efficiency Analysis for Multi-Target Tracking in a Clutter Environment. Remote Sens. 2024, 16, 1471. https://doi.org/10.3390/rs16081471
Radosavljević Z, Ivković D, Kovačević B. ITS Efficiency Analysis for Multi-Target Tracking in a Clutter Environment. Remote Sensing. 2024; 16(8):1471. https://doi.org/10.3390/rs16081471
Chicago/Turabian StyleRadosavljević, Zvonko, Dejan Ivković, and Branko Kovačević. 2024. "ITS Efficiency Analysis for Multi-Target Tracking in a Clutter Environment" Remote Sensing 16, no. 8: 1471. https://doi.org/10.3390/rs16081471
APA StyleRadosavljević, Z., Ivković, D., & Kovačević, B. (2024). ITS Efficiency Analysis for Multi-Target Tracking in a Clutter Environment. Remote Sensing, 16(8), 1471. https://doi.org/10.3390/rs16081471