Abstract
Unmanned aerial vehicles (UAVs) are increasing in popularity in various sectors, simultaneously rasing the challenge of detecting those with low radar cross sections (RCS). This review paper aims to assess the current state-of-the-art in radar technology, focusing on multiple-input multiple-output (MIMO) and beamforming techniques, to address this growing concern. It explores the challenges associated with detecting UAVs in urban settings and adverse weather conditions, where traditional radar systems often do not succeed. This paper examines the existing literature and technological advancements to understand how these methodologies can significantly boost detection capabilities under the constraints of low RCS. In particular, MIMO technology, renowned for its spatial multiplexing, and beamforming, with its directional signal enhancement, are evaluated for their efficacy in the context of UAV surveillance and defense strategies. Ultimately, a comprehensive comparison is presented, drawing on a variety of studies to illustrate the combined potential of integrating these technologies, providing the way for future developments in radar system design and UAV detection.
1. Introduction
Unmanned aerial vehicles (UAVs) have considerably expanded the horizons of contemporary surveillance and security, while simultaneously posing complicated challenges to radar detection. A major concern is the detection of UAVs with low radar cross sections (RCS) as they become more prevalent across a broad range of industries. Conventional radar systems face inherent limitations when trying to track such unknown small targets, increasing the need for sophisticated radar systems with advanced detection capabilities.
Multiple-input multiple-output (MIMO) technology has become popular in response to those problems. By leveraging multiple antenna elements, MIMO radar enhances spatial resolution and empowers the discrimination of targets, performing better than traditional radar systems; meanwhile, beamforming techniques have risen to prominence for their ability to focus the radar’s energy in specified directions, substantially improving the signal-to-clutter ratio (SCR) and mitigating clutter, which is critical for the precise detection of low RCS UAVs [1].
The purpose of this paper is to review the effectiveness of beamforming and MIMO technologies specifically for low RCS UAV detection. The paper discusses the evaluation of these technologies and their pivotal role in overcoming the complex challenges presented by UAV detection. By analyzing the capabilities and comparative advantages of MIMO and beamforming, the paper illustrates their potential to consider radar detection paradigms. The paper is organized carefully to present a critical review of the existing literature, a detailed analysis of the technological merits, and provide a path for future research efforts and direct the advancement of radar technology by highlighting the innovative contributions of MIMO and beamforming to the field. To ensure a comprehensive review, we employed a systematic methodology for selecting and analyzing the relevant literature to the detection of low RCS UAVs using MIMO and beamforming technologies. Our search strategy included a combination of keywords such as “low RCS UAV detection”, “MIMO radar”, “Beamforming”, and “advanced radar technologies” across several academic databases including IEEE Xplore, Scopus, and Google Scholar. The selection criteria were focused on the relevance to the core topics, the novelty of the research, and the contribution to the field of radar technology. This process led to the identification of 98 key references, including pioneering works as well as recent studies that provide insight into both the theoretical basis and practical application of MIMO and beamforming for UAV detection. The review explicitly considers the advantages and limitations of these technologies, providing a balanced perspective that acknowledges potential biases inherent in the available literature. By outlining this methodology, we aim to offer readers a clear understanding of the scope and depth of our review, ensuring transparency and reliability in our synthesis of the current state of the art.
The organization of this paper is outlined as follows: Section 2 provides a short theoretical overview of low RCS UAVs, and Section 3 offers a brief review of the existing radar-based detection technologies. The application of MIMO technology and beamforming in the detection of low RCS UAVs is explored in Section 4. The future research directions are presented in Section 5. Finally, the paper is concluded in Section 6.
2. Low Radar Cross Section Unmanned Aerial Vehicles
Detecting low RCS UAVs poses significant challenges due to their small size and material composition, which often includes engineering plastics, leading to inadequate SNR for radar detection [2]. Other sensor technologies also play a crucial role in the detection of UAVs in addition to radar [3,4]. A few examples are electronic support measure (ESM) systems, electro-optical (EO) sensors, infrared (IR) imaging, and acoustic detection methods [5]. There are distinct advantages to each technology when it comes to identifying and tracking UAVs under different conditions, expanding their capabilities well beyond those available with radar alone. Table 1 presents various sensors for UAV detection.

Table 1.
Overview of the Different Technologies Used in Drone Detection [3,4].
According to Table 1, radar holds a significant advantage in detecting UAVs for several reasons. Radar is a useful instrument in many operational scenarios because when operating within the appropriate frequency band, it is less affected by weather and lighting conditions [6] compared to other detection systems. Radar has a greater ability to reliably detect UAVs than optical or acoustic sensors, which are sometimes constrained by factors such as visibility or noise levels. Radar systems can also identify and monitor a UAV’s velocity and range, which is vital information for assessing threats and preparing for actions. The accuracy of speed detection is deemed so critical that it is the main focus of a specific research study [7].
A potential hurdle for radar-based detection is that the small RCS of UAVs contributes to weak radar returns, often buried in noise and clutter, making them difficult to distinguish from the background [8]. To address this challenge, NATO has categorized UAVs based on size and RCS, among other parameters, which are crucial for defining radar-based detection capabilities. Table 2 presents these classifications, outlining the distinct features of each UAV class, including weight range, operational altitude, mission radius, and payload capacity. Understanding how to detect low RCS UAVs following NATO classification is, therefore, essential [3,9]. Typically, Class I (micro, mini, and small) UAVs do not have a high RCS as they are too small and made of plastic, making them hard to distinguish as their radar signatures are similar to those of birds. Although Class II UAVs are larger than Class I, they may still have a relatively low RCS, especially if designed with stealthiness in mind, resulting in a slightly higher RCS than Class I but lower than larger, manned aircraft. Class III being larger and often designed for more complex missions, Class III UAVs might have a higher RCS. However, they can employ advanced design techniques, such as low observability technology, to reduce their RCS.
Table 2.
UAV classification based on weight, altitude, and range [3].
Moreover, in the context of low RCS UAV detection, the shape of UAVs significantly influences their radar detectability [10,11]. A smaller UAV, like a toy drone made of light materials, usually has a lower RCS, making it harder to detect. Conversely, professional UAVs often have a higher RCS due to their larger sizes and complex materials [12]. Despite their larger size, fixed-wing UAVs often have lower RCS due to their aerodynamically efficient or smooth designs, unlike rotary-wing UAVs such as quadcopters, hexacopters, or octocopters, which have higher RCS due to complex rotor blade designs producing distinctive Doppler signatures, as illustrated in Figure 1. The authors in [13] explain that the variety of UAV designs, from simple toys to advanced fixed-wing and rotary-wing types, makes radar detection more difficult. This variety forces radar systems to constantly improve and adopt new methods and technology for better UAV detection and classification.
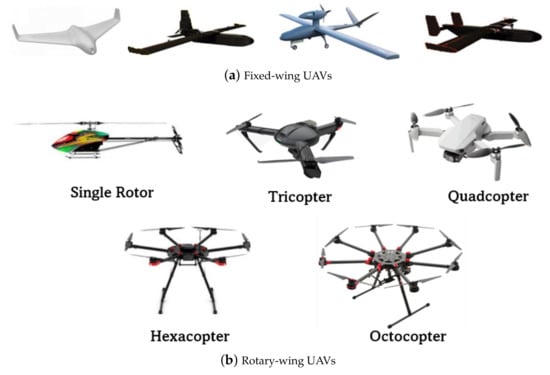
Figure 1.
Categorization of drones.
Additionally, in radar-based detection, some modern radar technologies, such as frequency-modulated continuous-wave (FMCW) [14], and continuous-wave (CW) radar [15], have enhanced capabilities in distinguishing UAVs from other objects. FMCW radar, in particular, is adept at filtering out background noise and clutter, challenges that are prevalent in urban and complex environments. The effectiveness of FMCW radar can be attributed to the de-chirping process [16]. This involves mixing the received signal with the transmitted chirp signal, which is crucial for accurately measuring the range and velocity of targets. One of the main challenges in FMCW radar performance is phase noise, which affects the coherence between the transmitted and received signals, thereby impacting the radar’s precision and SNR. The study [17] shows that phase noise can potentially originate from components like the fractional-N phase-locked loop (Frac-N PLL). This noise can significantly affect the radar’s precision by impacting the phase coherence between the transmitted and received signals. The study demonstrated an approach for estimating the effect of Frac-N PLL phase noise on FMCW radar precision, taking into account the actual shape of the phase noise profile. Similarly, frequency ramp nonlinearity can lead to inaccuracies in the intermediate frequency (IF) signal and target range estimation. To combat these issues, advanced signal processing techniques, such as the modified short-time Fourier transform method using the short-time Chirp-Z transform, have been developed [18]. These methods enhance the linearity of the IF signal and improve the accuracy of target range estimation by mitigating the effects of phase noise and frequency ramp nonlinearity. Unlike pulsed radar systems, where the amount of noise energy received is proportional to the pulse width, FMCW radar leverages these sophisticated methodologies to refine its noise rejection capabilities, thus, improving detection accuracy in challenging environments [19].
This ability to discern UAVs in dense environments underscores the superiority of radar in scenarios where other sensors might struggle. Furthermore, ref. [20] notes that UAVs, often characterized by low-speed flight, are difficult to detect against stationary or slow-moving clutter in urban and suburban areas, which highlights the value of advanced radar systems such as linear frequency-modulation continuous-wave (LFMCW). Furthermore, ref. [21] extends our understanding of FMCW radar capabilities, specifically in modeling micro-Doppler signatures of small UAVs, which is crucial for distinguishing UAVs in complex radar environments. Building upon these advancements in FMCW radar, the authors in [7] further enhance radar detection techniques specifically by addressing the Doppler range compensation in step-frequency continuous-wave (SFCW) radar. This research highlights the importance of advanced radar modifications to accurately detect small, low RCS UAVs in complex environments.
On the other hand, CW radar operates by transmitting a continuous signal at a single frequency, making it highly effective for measuring the velocity of targets via the Doppler effect [22]. While CW radar does not inherently provide range information without additional modulation techniques, it works best in scenarios where high-resolution velocity measurements are critical. This makes CW radar particularly useful in applications where tracking the movement and speed of UAVs is more important than determining their exact range. In [23], the authors showcase how CW radar can detect drones by examining propeller blade Doppler signatures. In contrast, ref. [24] focuses on classifying UAVs by analyzing their propeller characteristics through sophisticated radar signal processing techniques.
Regarding the challenges in radar-based UAV detection, ref. [20] illustrates the complexities of identifying low–small–slow UAVs (LSS-UAVs) within urban settings, where a variety of objects may mask UAV signals, making it difficult to distinguish them from background clutter. It provides an in-depth analysis of the LFMCW radar systems’ detection capabilities, exploring the complexity of signal processing in cluttered environments and underscoring the pivotal role of velocity dimension detection and the adoption of broad bandwidth signals, supported by Monte-Carlo simulations, to enhance detection efficacy in densely populated areas. Ref. [4] explores the identification of drones and their controllers using a variety of detection methods, as well as combined techniques that integrate these different approaches. It highlights the challenge of distinguishing UAVs from other objects, such as birds, since they can appear similar on radar screens due to their comparable RCS, leading to potential misidentifications. In [25], the authors offer critical insights into the RCS profiles of various UAV types, especially those operating at low altitudes and high speeds. They highlight the requirement for advanced radar systems like inverse synthetic aperture radar (ISAR), which can distinguish small RCS differences, a key factor in effective UAV detection. Finally, ref. [26] outlines the challenge of detecting micro-UAVs that are both slow-moving and have a small RCS. These UAVs are difficult to identify, as their radar signals are weak and often lost in the noise and clutter of the environment. However, the use of digital array radar (DAR) and digital beamforming (DBF) techniques can enhance radar detection capabilities. By combining multiple surveillance beams simultaneously, DAR can effectively monitor a broad area, allowing for extended focus on targets and significantly improving Doppler resolution.
Following an investigation of the existing challenges associated with detecting low RCS UAVs, it becomes necessary to augment the capabilities of radars with innovative solutions. Among the technologies that have shown promise in this regard are multiple-input multiple-output (MIMO) and beamforming. They play a critical role in significantly improving the tracking and detection capabilities of UAVs and are at the forefront of radar technology advancements. These technologies are discussed in detail in the following sections, which explain how they work and what advantages they offer.
3. Insight into Radar-Based Detection Techniques
3.1. MIMO Technology in Radar Systems
Multiple-input multiple-output (MIMO) radar technology, a pivotal innovation in radar systems, fundamentally employs multiple transmitting and receiving antennas [1,27,28]. This approach significantly differs from the conventional monostatic radars by allowing each antenna to operate independently, thereby creating a more complex and informative view of the target area. The essence of MIMO lies in its utilization of these multiple antennas to enhance communication performance, thereby improving target detection and resolution. This improvement is achieved through spatial multiplexing and time diversity, achieved by transmitting diverse waveforms from different antennas. Such an approach enables the radar system to gather more data, constructing a more detailed image of the target scene. Spatial multiplexing, in particular, leads to significant advancements in signal processing, including better clutter rejection, enhanced target identification, and increased robustness against interference. Additionally, the sensitivity of MIMO systems to phase and positioning errors is a crucial aspect for understanding their impact on the accuracy and reliability of MIMO radar systems [29], especially in configurations with dense or randomly arranged antenna arrays. Table 3 offers a comparative analysis between MIMO and conventional radar systems, considering the same hardware complexity and physical antenna elements.
Table 3.
Comparison between MIMO and Conventional Radar systems, taking into account the same hardware complexity and the number of physical antenna elements.
Providing an insight into the details of MIMO radar [30] explores its application in radar, a concept originally derived from communications that is particularly beneficial in multipath fading environments. The paper gives information on several MIMO radar configurations with a particular emphasis on within-aperture MIMO. This involves the coherent combination of multiple orthogonal signals from transmitter elements of a phased array upon reception. Additionally, Ref. [31] emphasizes how MIMO radar systems have better parameter identifiability than conventional phased-array radars. This is explained by the fact that MIMO radars’ inherent waveform diversity makes it possible to identify a much greater number of targets. This improvement in target identification capacity highlights the core benefit of MIMO radar systems and shows how they can be used in more productive applications. Specifically, time division multiplexing (TDM) MIMO and frequency division multiplexing (FDM) MIMO contribute distinctly to this diversity. TDM MIMO, where transmit antennas send signals at different times, ensures temporal orthogonality, useful in limited frequency environments or to avoid frequency interference [32]. Conversely, FDM MIMO utilizes a unique frequency for each antenna, providing a rapid transmission and frequency separation when temporal separation is not feasible [33].
Addressing the technical challenges and solutions, Ref. [34] investigates the argument that MIMO radars are more effective than conventional radars in combating clutter and repeater jammers. In this regard, a notable advancement is the introduction of adaptive–adaptive array processing (AAAP), also known as cognitive adaptive array processing (CAAP), which is a sophisticated radar jamming countermeasure that utilizes the locations of jammers to optimize jammer cancellation. This method significantly reduces the need for a large number of training samples and computational resources that conventional methods like sample matrix inversion (SMI) typically require. With this method, the interference covariance matrix calculation computational demands are significantly reduced, and it can be applied to both MIMO and conventional array systems. By focusing on a more efficient process for estimating the interference covariance matrix, crucial for effectively filtering out jamming signals and maintaining the radar’s target detection capabilities, AAAP enhances the radar’s resilience to interference. This provides significant advancements over conventional techniques and is consistent with the digital beamforming trend. The fundamentals of angle estimation and MIMO radar principles, including different multiplexing techniques and the application of MIMO radar on mmWave sensors, are covered in [35]. The focus is on using different antennas to transmit independently and makes the use of adaptive techniques easier.
Regarding novel methodologies and comparative analyses, Ref. [36] addresses two categories of MIMO radars; collocated MIMO radars and statistical MIMO radars with widely separated antennas. With its higher angle resolution and improved target parameter identification, the former is recognized as a novel and promising idea in radar technology. On the other hand, since statistical MIMO radars are essentially a component of multisite radar systems, they are criticized for not being innovative. Instead, in contrast to conventional radar systems, Ref. [37] introduces the concept of a statistical MIMO radar, which leverages target scattering diversity, significantly enhancing detection performance in multiple-target scenarios. It uses spatial diversity to counteract fluctuations in target RCS, thereby producing a more stable SNR. In [38], a new method called phased-MIMO radar is presented. It combines the advantages of MIMO radar with collocated antennas and phased-array radar’s coherent processing gain. This method improves robustness against interference and boosts angular resolution. To enhance radar functions like detection and parameter estimation, Ref. [39] investigates the interaction between MIMO radar and centralized processing. Despite signal bandwidth limitation, the paper shows how MIMO radar can resolve scatterers with high resolution and locate targets with accuracy. The article in [40] explores the use of MIMO techniques in radar systems, emphasizing adaptive transmit and receive beamforming and better search radar scan performance. The study highlights how MIMO radar offers significant improvements over conventional radar methods, including better target resolution and clutter rejection.
When examining the state-of-the-art advancements in MIMO radar technology, refs. [41,42,43] are essential, especially when talking about statistical MIMO radar and sophisticated processing methods. Additionally, ref. [44] presents a significant development in antenna design by applying compressive sensing integrated into a MIMO configuration that can dramatically enhance radar imaging capabilities. With these advances in antenna technology, MIMO radar systems in complex detection scenarios can attain higher angular resolution and greater effectiveness.
Likewise, there have been some studies performed on the applications of MIMO radar. These include automotive radar systems [45,46], maritime scenarios [47], and the detection of stealthy air objects [48]. These references aim to draw attention to the various and dynamic ways that MIMO radar technology is being used in modern situations, highlighting its adaptability and significance.
3.2. Beamforming Technology in Radar Systems
As mentioned in [49], the idea of beamforming in radar systems involves adjusting the signal’s phase and amplitude at each array element to direct the beam in the desired direction. Radar performance has been improved by this technique, which has developed from conventional methods to sophisticated hybrid beamforming. In [50], beamforming benefits are discussed with an emphasis on millimeter-wave (mmWave) hybrid beamformers with spatial path index modulation. This innovation enhances spectral efficiency, a crucial benefit for modern radar systems. In [51], the implementation of hybrid beamforming with sub-arrayed MIMO radar in the mmWave band is discussed. It demonstrates a favorable balance between sensing capabilities and communication efficiency. To further investigate the variety of beamforming techniques, Table 4 categorizes the main methods employed within both narrowband and wideband beamforming paradigms. Notably, while both narrowband and wideband beamforming techniques have distinct applications, narrowband beamforming is often considered superior for its enhanced accuracy in target detection and localization under limited bandwidth conditions, a critical factor in many conventional radar scenarios. This precision is crucial in applications such as aircraft tracking, weather monitoring, navigation aids, and particularly in UAV detection, where the ability to accurately localize and detect UAVs is important. The enhanced accuracy of narrowband beamforming in such applications ensures the reliable monitoring and management of UAVs in various operational contexts. Conversely, wideband beamforming with its broader frequency range offers better resolution and is more adept at operating in complex or cluttered environments, making it a potentially more effective technique in advanced radar systems [52,53,54]. The wider frequency range of wideband beamforming is advantageous for special scenario applications such as through-the-wall radar detection and ground-penetrating radar, due to its improved ability to better handle multipath propagation effects. While wideband beamforming might also be applied in UAV characterization, offering detailed information on UAV features in cluttered environments, the focus on narrowband beamforming for UAV detection is due to superior target localization capabilities.
Table 4.
Categorization of Beamforming Techniques.
Subsequently, Table 5 provides a detailed and comprehensive overview of how these techniques are applied in radar systems, explaining the specific advantages that each type brings to radar technology [55,56,57,58,59,60,61,62,63], and Figure 2 depicts the various narrowband beamforming techniques and modes of operation. A switched beamforming system in radar operations highlights a network that steers predefined beams using a series of switches (k1–k4) to control the direction of each beam (P1–P4). The initial signal in this system is produced by digital baseband processing and is subsequently up-converted to the proper frequency for transmission by the RF chain. The switch in the beamforming network determines which of the predetermined beam paths is activated at any given time. The control mechanism determines the optimal beam path for each target by assessing which beam provides the highest SNR. Once the beam with the highest SNR is identified, the system uses the corresponding key to switch to the appropriate beam path. This configuration enables a straightforward but efficient method to focus radar energy on several targets, with each beam able to be used by various users in the same coverage area. When a radar system needs to quickly switch between beams to track multiple targets or cover different areas of the surveillance area, the switched beamforming approach becomes useful.
Table 5.
Narrow Beamforming Techniques and Their Applications in Radar Systems.
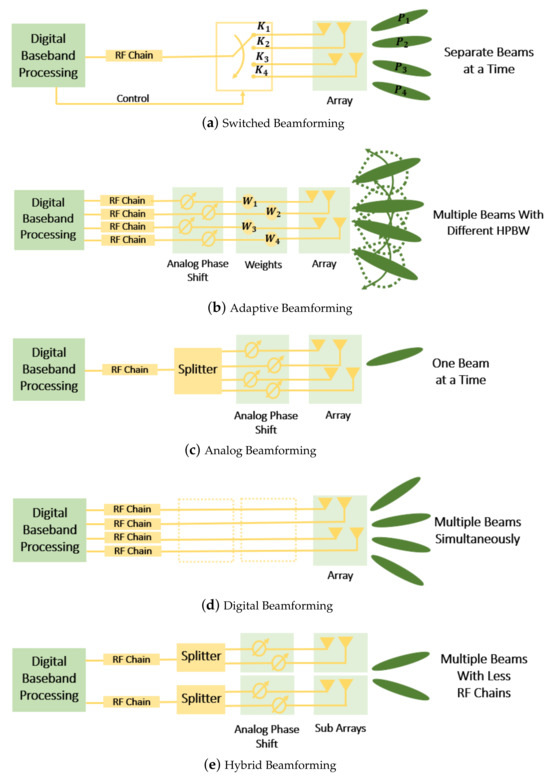
Figure 2.
Various Beamforming Techniques.
Unlike switched beamforming, which relies on a static set of predefined beams, adaptive beamforming dynamically adjusts beam patterns to optimize signal reception and transmission, adapting to changing environments and target movements. Each antenna element is equipped with its own RF chain, which is essential for up-converting the digitally processed baseband signals to the necessary radio frequencies. Weights (w1–w4) are applied to control the phase shifts required for each antenna element’s signal during the beamforming process’ adjustments. This system allows for the generation of several directionally variable beams with different half-power beam widths (HPBW), which guarantees accurate focus and low interference. The advantage of adaptive beamforming is its accurate direction-of-arrival (DOA) calculation, which facilitates better power consumption and interference control. Although adaptive beamforming is complex, its accuracy makes it essential for contemporary radar systems functioning in dynamic, signal-dense settings.
In analog beamforming, digital baseband processing generates the initial signal, which is then transmitted via a single RF chain. After being up-converted to the RF domain, the signal is divided into several paths. Every path is linked to an analog phase shifter, which applies a particular phase delay and is controlled by weights that are probably set in the digital domain but used in the analog domain. These phase delays are crucial for steering the beam in the desired direction, as they determine the constructive and destructive interference patterns necessary for beamforming. The multiple signals, now phase-aligned according to the weights, are combined in the antenna array to produce a single, focused beam at a time. This configuration illustrates the simplicity of analog beamforming, which is power-efficient and cost-effective due to its minimalistic use of hardware components. However, this simplicity also means that analog beamforming systems have less flexibility in adjusting to rapidly changing environments or complex beamforming needs, such as those required for tracking multiple or fast-moving targets. The system works well in situations where the targets move slowly or are stationary and the beam pattern is not required to be quickly adjusted due to external factors.
Digital beamforming (DBF) allows the generation of multiple beams simultaneously by giving each RF chain in the array independent control over the amplitude and phase of the signal. This process, all conducted digitally before DAC conversion, affords precise beam shaping and steering. Adjusting patterns for improved target resolution and interference mitigation is one of DBF’s benefits, especially in receiving. High resolution and low sidelobes are achieved with techniques such as adaptive pattern reducing and array element pattern correction.
Finally, using the advantages of both analog and digital beamforming, hybrid beamforming effectively creates multiple beams with fewer RF chains. The process starts with digital baseband processing, which directs signals through a minimal set of RF chains. A splitter receives the signal from each chain and distributes it to analog phase shifters located within subarrays. This configuration allows for the complex beam shaping and steering capabilities typical of digital beamforming while maintaining the hardware simplicity of analog beamforming. Hybrid beamforming, which is widely used in 5G networks, uses precoding at both the baseband and RF levels to create the exact beam patterns required for high FM-wave applications. This method offers a cost-effective alternative to fully digital systems by dramatically cutting down on hardware expenses and power consumption, without sacrificing the ability to manage multiple communication streams simultaneously.
Regarding insights into the challenges associated with beamforming, ref. [64] highlights a specific challenge, achieving high angular resolution. It highlights the complexities involved in sustaining high-gain beams within FMCW radar systems, a key factor for precise target identification. Furthermore, ref. [65] investigates the complexities of designing transmit and receive beamforming in MIMO radar systems among signal-dependent interference, highlighting computational challenges and proposing innovative solutions. The authors in [66,67] highlight the transition from traditional analog beamforming methods to advanced digital beamforming techniques in radar systems. This evolution is significant for spaceborne SAR and FMCW MIMO radar networks, marking a pivotal point in the development of radar technology. Additionally, refs. [68,69] detail the implementation of digital beamforming in multi-channel SAR systems. This technique is shown to significantly enhance system capabilities, notably in achieving finer resolution and broader swath imaging. Such advancements are particularly important in remote sensing applications, where capturing detailed imagery over large areas is essential. Ref. [70] shows the use of overlapped subarray-based hybrid beamforming in millimeter-wave (mmWave) MIMO radar systems. The paper in [71] investigates whether different beams and phase centers in digital beamforming SAR systems are equivalent. This study adds to our knowledge of how digital methods may approximate the features of conventional hardware configurations, emphasizing the versatility of current beamforming technologies. In [72], the focus is on the application of hybrid beamforming in mmWave MIMO systems to mitigate intended jamming. This aspect is crucial for maintaining the integrity and reliability of radar systems in potentially hostile or adversarial environments, where external interference can pose significant challenges.
Observing the most recent developments in beamforming radar technology, ref. [73] discusses the implementation of the sparse iterative covariance-based estimation (SPICE) algorithm for hyperparameter-free sparse source location in massive TDM-MIMO radar systems. While traditional SPICE algorithms are effective in enhancing resolution and suppressing sidelobes, they require numerous iterations involving complex, high-dimensional matrix operations, making them impractical for real-time hardware implementation with large-scale TDM-MIMO data. To address this issue, the paper introduces a subaperture-recursive (SAR) SPICE method that enables the recursive refinement of location parameters with each new block of received data, significantly reducing computational demands and hardware requirements. This method is demonstrated through a high-throughput architecture on an FPGA, showcasing rapid processing capabilities, as confirmed by the experimental data from a cascaded MIMO radar system. The authors highlight the SAR SPICE method’s potential for efficient and accurate source location in practical applications, representing a significant advancement over conventional techniques and aligning with the trend toward digital beamforming.
Ultimately, Table 6 offers a detailed comparison between radar systems, highlighting the enhancements in the performance achieved through the integration of beamforming technology, as opposed to systems that lack this advanced feature.
Table 6.
Performance Achievements with the Application of Beamforming Technologies.
3.3. MIMO and Beamforming Working Principle
In the former subsections, we conducted a comprehensive review of the advantages offered by MIMO and beamforming technologies in radar systems, highlighting their pivotal role in enhancing spatial resolution, target detection capabilities, and minimizing interference. Building on this basis, we now turn our attention to the underlying principles of these technologies, aiming to explain how they function and contribute to the advanced performance of modern radar systems. Figure 3 illustrates the complexity of integrating MIMO and beamforming in radar systems. The MIMO technology is mathematically represented by the equation
where is the received signal matrix, is the steering matrix based on the arrival angle , denotes the transmitted signal matrix, and is the noise. Meanwhile, beamforming can be characterized by the beamforming Gain, denoted as , which is a critical measure in antenna array theory. It reflects the improvement in signal strength achieved by coherently combining signals from multiple antenna elements to focus energy in a specific direction. This gain is pivotal for enhancing the system’s detection capabilities and communication quality by steering the beam toward a target or desired direction, thereby increasing the signal-to-clutter ratio (SCR) and effectively mitigating clutter. The equation representing beamforming is as follows:
where is the gain of a single antenna element, N is the number of elements, is related to the phase of the signal and depends on the wavelength, , of the transmitted signal. It converts the physical distance, d, which is the distance between each antenna element and angle into a phase shift. is the sine of the angle of beam steering, which is the direction in which the beam is focused, and is the steering direction.
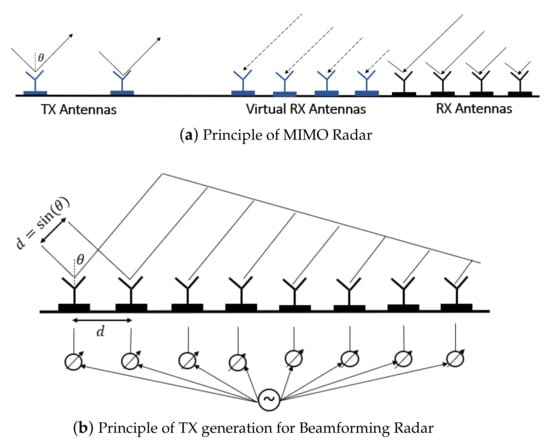
Figure 3.
Advanced Technology Solutions.
Beamforming technology significantly impacts radar systems by focusing the transmission energy in a desired direction using the whole set of transmitting antennas at the same time. Controlling the phase displacement between elements, the transmission beam is steered in specific directions. As this, the set of transmitting antennas works as a phased array with more elements, thus, increasing its transmission gain and reducing the pattern half power beam width (HPBW). The HPBW is a critical parameter that determines the resolution of the radar and its ability to reject the clutter. It is defined as the width of the beam at which the power drops to half of its peak value, and from beamforming composition, the results are
where is the HPBW of an individual antenna element, and is the total number of transmitting antennas in the beamforming array. A lower HPBW improves the radar system capability to focus signal energy to a specific direction, decreasing the amount of signal energy sent to targets placed in different directions. This feature is particularly appealing when dealing with high-clutter scenarios, as clutter back-scatter signals coming from unwanted directions can saturate the radar receiver stage, reducing its sensitivity, actually reducing detection capability for smaller targets.
Conversely, MIMO radar technology uses the different transmitting antennas in separate time windows, exploiting time diversity, to obtain a bigger amount of information for image focusing. Therefore, the transmission HPBW for MIMO configuration results are as follows:
For the MIMO approach, each transmitting antenna provides a set of signals that can be used to produce a final radar image. With this, a MIMO image acquisition provides separate signals that can be related to an identical amount of virtual receiving antenna elements, dramatically improving the cross-range resolution. In conclusion, The beamforming technique improves the radar clutter rejection capability through better energy focusing while reducing the cross-range resolution. Alternatively, the MIMO approach maximizes the latter, but it is more exposed to desensitization issues, which can reduce detection capability for smaller targets in cluttery environments.
Through the combined application of the MIMO and beamforming technologies, radar systems can achieve unparalleled precision and flexibility in target detection and tracking, representing a notable advancement in radar technology. However, the fusion of MIMO and beamforming technologies transcends a simple mathematical equation, as it involves a complex interplay between MIMO’s spatial diversity and beamforming’s directional gain. This integration leads to a sophisticated radar system capable of superior performance in challenging environments by effectively utilizing the spatial multiplexing of MIMO for enhanced resolution and the focused energy delivery of beamforming for improved UAV detection [74,75]. To conceptualize the fusion of MIMO and beamforming in radar systems, we introduce an integrated equation:
where represents the received signal matrix, integrating the effects of both MIMO and beamforming technologies. is the steering matrix that encapsulates the essence of the array’s spatial diversity. For a uniform linear array (ULA) with N antenna elements, the steering vector for a particular direction can be expressed as
The full steering matrix for the MIMO system can be constructed by concatenating steering vectors for all desired steering angles . denotes the beamforming gain, enhancing the signal strength in the beamformed directions; is the transmitted signal matrix from the MIMO system, which is enhanced by the beamforming gain for improved directivity and focus; and represents the noise matrix, accounting for the system’s inherent and environmental noise. This formulation demonstrates the effective enhancement of radar capabilities through the combined use of MIMO’s spatial diversity and beamforming’s focused energy delivery, enabling superior target detection and tracking performance, especially in complex environments.
4. Application of MIMO and Beamforming in Low RCS UAV Detection
In our previous discussions, we explored the realms of MIMO and beamforming technology in radar systems, as well as the details of detecting low RCS UAVs via radar. Building upon these fundamental concepts, we now shift our focus to the collaborative application of MIMO and beamforming technologies in the specific context of low RCS UAV detection. Figure 4 shows a mindmap that helps us understand how these advanced technologies work together.
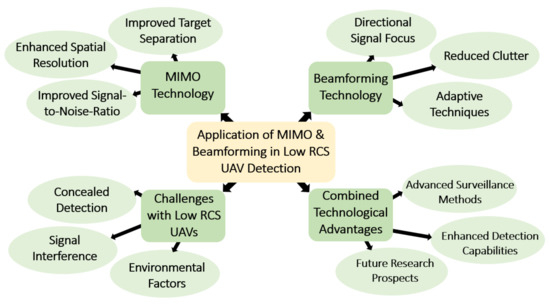
Figure 4.
Mindmap of MIMO and Beamforming in UAV Detection.
Referencing Figure 4, the heart of this integration is MIMO technology, well-known for its enhanced spatial resolution and improved SNR. These attributes are pivotal in detecting low RCS UAVs, which often blend into background noise. Complementing MIMO, beamforming technology emerges as a critical player with its directional signal focus and clutter removal.Through adaptive techniques, which involve the real-time calibration of antenna patterns to focus on the desired signal while suppressing interference and noise, beamforming enhances detection accuracy. These smart adjustments make it a valuable asset in modern radar systems, adapting to the constantly changing environment and maintaining optimal performance.
The mindmap further illuminates the challenges posed by low RCS UAVs, encompassing concealed detection difficulties, signal interference, and environmental factors that can adversely affect radar performance. However, the fusion of MIMO and beamforming technologies presents a robust solution, not only enhancing detection capabilities but also paving the way for advanced surveillance methods. This integration is a testament to the evolving landscape of radar technology, where precision and adaptability are paramount.
4.1. MIMO Technology in Low RCS UAV Detection
This subsection presents a comprehensive study of low RCS UAV detection using MIMO technology. The authors in [76] highlight the efficiency of MIMO radar technology in UAV surveillance. They present the testing of an S-band MIMO scanning radar system, specifically designed to address the challenges of tracking small, fast-moving targets. Ref. [77] outlines the development of an S-band MIMO scanning radar system. It emphasizes employing sparse array optimization and a specialized calibration method for MIMO radar arrays, and these techniques are adapted to enhance the detection of small drones. Ref. [78] explores various radar technologies for UAV detection, underscoring challenges like small RCS and complex flight patterns. It compares different systems: passive radar, which relies on external electromagnetic sources; active multi-static radar, with multiple transmitters and receivers for enhanced angles; MIMO radar, noted for its advanced target detection and tracking; and cognitive radar, adaptable to environment and target dynamics. Particularly, MIMO radar stands out for its enhanced UAV observation capabilities, which demonstrate its usefulness in the developing field of UAV defense. The authors in [79] specifically detail a MIMO OFDM radar system for UAV detection, emphasizing its setup with software-defined radios and a MIMO antenna array. This setup aims to enhance angular resolution and enable effective drone detection, even in challenging conditions. The aim of [80] is to introduce a sophisticated anti-drone framework that utilizes 3D FMCW MIMO radar combined with a 2.4 GHz directional jammer, designed especially to protect regions against unauthorized commercial drone operations. In [81], the authors demonstrate the capabilities of MIMO radar for the detection and tracking of UAVs. They highlight the effectiveness of MIMO radar technology in UAV surveillance by presenting experimental results from a multi-sensor measurement campaign.
Ref. [82] is distinguished by its use of affordable MIMO CW radars and Doppler-only localization techniques, with the study’s key contribution being the successful demonstration of the MIMO cyclic spectral density (MCSD) method’s effectiveness in drone surveillance, as evidenced through simulations, experimental results, and a thorough analysis of performance and cost-efficiency. In [16], the study focuses on developing a MIMO radar system using gallium nitride technology at 37.5 GHz, specifically for UAV detection. This research includes a detailed system-level analysis, covering sub-system specifications and performance evaluations, and highlights the radar system’s effectiveness in UAV surveillance, with a particular emphasis on detecting small drones. The development of a MIMO radar system, verified by simulations and experimental results, is presented in [83]. It makes use of a Doppler division multiple access (DDMA) waveform and sparse arrays to improve angle estimation and suppress beam pattern grating lobes, thereby improving the detection of low, slow, and small targets, like UAVs. Through the study in [84] the authors present the results of an extensive measurement campaign that demonstrate the capabilities of the MIMO radar-configurable in Ka-band (MIRA-CLE Ka), for identifying UAVs that are used for spying or terrorist purposes, emphasizing the importance of advanced sensors and techniques for monitoring UAVs. Ref. [85] indeed presents a study on various technologies for detecting, localizing, and tracking unauthorized UAS and jammers, including MIMO radar. It specifically highlights the advantages of MIMO radar, notably, its higher spatial diversity, which enhances its effectiveness in accurately detecting and estimating parameters of small UAVs. This capability is particularly valuable for addressing challenges like small RCS and the low-altitude, low-speed maneuvers of UAVs.
The study [86] extensively covers sensor technologies for UAS detection, emphasizing MIMO radars for their enhanced detection sensitivity and real-time Doppler resolution. It demonstrates how MIMO radars, using a 32-by-8 element L-Band receiver array, effectively distinguish small drones from other objects like birds, employing machine learning for precise identification. In the paper [87], the authors introduce a novel approach for detecting low-observable moving targets using a frequency diverse array MIMO (FDA-MIMO) radar system. They also present the space-range-Doppler focus (SRDF) processing technique, which utilizes the high-resolution and flexible capabilities of FDA-MIMO radar, where this approach is effective in differentiating moving targets from clutter, enhancing the signal-to-clutter ratio, and providing precise measurements of the motion parameters of these targets.
4.2. Beamforming Technology in Low RCS UAV Detection
When it comes to beamforming, in [88], the authors detail an advanced radar signal processing technique for UAV detection, utilizing a multi-channel phased-array system with beamforming. This approach, enhanced by super-resolution processing, significantly enhances the radar’s capability to distinguish UAVs in complex scenarios, enhancing detection accuracy, particularly when multiple UAVs are present or in proximity to other objects, showing the effectiveness of beamforming in challenging environments. In [89], the author focuses on developing a compact radar system for small UAS, considering size, weight, power, and range compatibility for sense and avoid capabilities. This radar, featuring a four-element phased-array receiver, is adapted for detecting and avoiding other UAVs, enhancing UAS safety. Key highlights include its multi-target tracking ability, minimal form factor, and the use of beamforming techniques for efficient target detection and tracking. In [90], the authors explore using a phase-interferometric approach with a dual-channel Doppler radar for drone detection and tracking, focusing on differentiating drones from similar small, low-flying objects like birds through micro-Doppler signature analysis. This study employs beamforming techniques, specifically FFT-based beamforming, to measure the angle-of-arrival of the detected targets, thereby enhancing drone trajectory tracking by creating a combined 3-D range-Doppler-angle map from two channels. In [91], three distributed beamforming algorithms are introduced for UAV arrays, aiming to address the positioning and signal phase errors that decrease beamforming effectiveness. The study analyzes the array’s signal phase error model under near-field conditions and puts forth solutions leveraging the extended Kalman filter (EKF), Kalman filter (KF), and unscented Kalman filter (UKF), modified to the availability of the navigation data and noise characteristics. In [5], the authors highlight the vital role of radar in C-UAS operations for UAV detection, tracking, and classification. They emphasize the importance of high-performance radars to counter UAS threats and discuss the challenges faced in C-UAS radar applications. The paper also delves into the use of advanced digital beamforming techniques, such as elemental and quasi-elemental, to enhance radar’s ability to precisely target and classify aerial threats, thus, improving counter-UAS strategies.
In [92], the authors present an algorithm aimed at improving the detection of low, slow, and small (LSS) targets, like UAVs, among significant ground clutter. This algorithm utilizes a beamforming approach, particularly a transmit beam control method based on second-order cone programming (SOCP), to effectively minimize ground clutter, especially from moving targets such as small UAVs. This approach not only reduces energy spread across the ground but also maintains the integrity of the main lobe and aligns to peak-to-average power ratio (PAPR) constraints, ensuring the efficient use of emission power. Another study emphasizing enhancing drone and airscrew signature detection in cluttered environments using optimized beamforming techniques is presented in [93]. It examines the impact of drone airscrews’ micro-Doppler signatures on passive radar’s ability to detect and track drones. A significant feature of this research is the implementation of a bi-dimensional tracker, which relies on the Kalman filter. This tracker is pivotal for both tracking drones and extracting crucial features from their micro-Doppler signatures. The work in [88] utilizes beamforming to enhance UAV detection, integrating echo energy for improved accuracy. This technique’s advantage lies in its ability to boost signal-to-noise ratios, leading to more precise UAV identification, especially in complex scenarios with multiple targets. The authors of [94] develop a radar system using beamforming control within a two-dimensional electronic scanning active phased array. This approach significantly improves the detection of low-altitude, slow-moving, small targets, especially in environments with strong ground clutter. Another study [95] focuses on improving the detection of small drones using passive radars (PRs) with digital video broadcasting signals. The paper highlights the use of optimized beamforming techniques to enhance the signal-to-interference ratio (SIR), and it mentions a specific two-stage frequency-domain spatial filtering processing scheme. The study [88] presents an adaptive radar signal processor designed for UAV detection, utilizing a multi-channel phased-array radar system. It tackles the challenge of detecting closely spaced UAVs in range and Doppler, and the key to its functionality is beamforming, which enhances detection and resolution by directing signal transmission and reception.
4.3. Fusion of MIMO and Beamforming Technology in Low RCS UAV Detection
Highlighting the efficacy of MIMO technology and digital beamforming in UAV detection, ref. [96] delves into creating a MIMO radar utilizing software defined radio (SDR) technology. It underscores the critical role of MIMO and beamforming in enhancing the detection of low RCS, slow-moving UAVs within background clutter. The research demonstrates MIMO’s advanced spatial resolution and target separation capabilities, effectively addressing UAV surveillance challenges. The study [97] combines MIMO radar technology with the super-resolution MUSIC algorithm for UAV localization. The focus is on using mmWave radar for reliable 3D localization of drones, enhanced by analyzing micro-Doppler effects from rotating propellers. The application of MIMO provides spatial diversity, improving detection, while the MUSIC algorithm, a form of beamforming, aids in accurately estimating the drones’ locations. Another study [80] focuses on how MIMO and digital beamforming technology are good at detecting UAVs. It uses MIMO radar because it can pinpoint locations very well, along with beamforming to locate accurately. This combination helps in effectively tracking and blocking small drones, which is important for protecting important places. The advanced detection ability of MIMO radar and the precise blocking power of beamforming work together to disrupt the controls of drones, which shows how well MIMO radar and beamforming work together in stopping drone threats. The paper [98] describes an advanced system designed for detecting and locating UAVs using various signal features. It uses two key technologies: digital beamforming (DBF) and MIMO. The DBF is integrated into the radar to improve its ability to search, especially effective for finding micro-UAVs that are far away and moving slowly. Meanwhile, MIMO imaging radar is used to identify and follow UAVs, managing to detect them up to 150 m away even in environments with a lot of clutter. The authors of [99] discuss the use of both MIMO and beamforming technologies for the detection, tracking, and classification of aerial threats, particularly UAVs. They highlight the advantages of using MIMO radars, which include dramatically improved refresh rates, effective performance against UAV swarms, and the capability to eliminate ground clutter, thus, offering better performance compared to conventional radars. Additionally, they note the use of digital and adaptive beamforming techniques, which contribute to higher detection probabilities of small UAVs, better angular resolution, and increased update plot frequency. This combination of MIMO and beamforming technologies provides a robust framework for effectively handling the challenges posed by small and agile aerial threats like UAVs. In paper [100], the radar system combines FMCW MIMO and digital beamforming technologies for UAV swarming tracking and collision avoidance scenarios. MIMO processing helps in effectively tracking and avoiding collisions. Digital beamforming, performed after converting signals from analog to digital, allows for precise control in the tracking process. This integration of MIMO with digital beamforming enhances the system’s performance in managing UAV swarms.
5. A Comparative Evaluation of MIMO and Beamforming Technologies for Low-RCS UAV Detection
Following our previous discussions, we now turn our attention to a comprehensive comparison of the above two technologies in the detection of low RCS UAVs, particularly under conditions of equivalent hardware complexity. While both MIMO and beamforming technologies have individually contributed to the advancements in UAV detection capabilities, they present unique challenges and limitations that need to be addressed to further their application in radar systems. To clarify these points at a glance, Table 7 compares the benefits and drawbacks of MIMO and beamforming technologies for low RCS UAV detection.
Table 7.
Comparative Analysis of MIMO and Beamforming under Equivalent System Complexity.
MIMO technology improves target detection and spatial resolution by creating a virtual array with multiple transmitters and receivers. This feature is particularly valuable in scenarios requiring multiple target tracking and detailed spatial information. MIMO offers these advantages with hardware complexity comparable to beamforming technology. Nevertheless, the system’s complexity, due to the need for several transmitters and receivers, increases hardware demands and poses potential scalability issues, making the system more sensitive to interference and problems with signal coherence.
This complexity particularly affects the practical use of radar systems, especially when trying to maintain performance in cluttered environments. Conversely, beamforming is known for its directed energy focus and offers robust clutter rejection by focusing the radar beam on specific targets. This focus enhances the signal-to-clutter Ratio (SCR), helping in the detection of low RCS UAVs, particularly in cluttered environments. When beamforming systems are designed with hardware complexity comparable to MIMO setups, they retain their clutter rejection capabilities. However, to ensure comprehensive coverage and effective target tracking, these systems must adeptly manage beam steering to balance focus and field of view.
6. Future Directions in Radar Technology
The future research aiming at further enhancing the adaptability and effectiveness of radar systems will have a strong foundation due to the significant advancements in radar detection capabilities made possible by the integration of MIMO and beamforming technologies, especially for low RCS UAVs. The creation of sophisticated signal-processing algorithms is one of the main areas that needs to be explored since it is essential to future developments. The goal is to significantly improve signal clarity and noise reduction, which will enhance the radar’s capacity to detect UAVs against a variety of backgrounds. To create algorithms that provide target detection and identification capabilities across a range of scenarios will include utilizing the spatial diversity of MIMO and the directional precision of beamforming. The future studies should also focus on creative designs for radar systems that emphasize simplicity without losing functionality. The development of methods such as compressive sensing and multi-sensor fusion offers promising paths toward smaller antennas without compromising the precision or reliability of data analysis. To facilitate simple and rapid deployment across a range of platforms and environments, this minimization effort should also involve an evaluation of system architectures. Additionally, investigating cascade radar systems may open up new radar performance prospects by enabling multiple sensing and data integration to enable more advanced tracking and detection capabilities.
Furthermore, there is a chance to significantly increase target detection and system efficiency with new beamforming techniques like adaptive and hybrid beamforming. Especially in difficult environments, digital beamforming integrated with MIMO systems may result in improved resolution and clutter rejection. To overcome the existing constraints and enable new radar capabilities, optimizing beamforming algorithms for improved directionality and focus, particularly in multi-target scenarios, will be essential. The potential fusion of MIMO and beamforming with cutting-edge technologies like quantum radar and artificial intelligence (AI)-based signal processing marks an exciting frontier. While AI and machine learning algorithms may offer dynamic and adaptive signal processing and target recognition capabilities, quantum radar may offer previously unavailable sensitivity and detection capabilities. Radar systems could be completely transformed by this combination, becoming faster, more intelligent, and able to handle threats that are becoming more and more complex. The introduction of AI and machine learning into radar systems signals the beginning of a new era of enhanced detection precision and real-time adaptability. As AI continues to progress, radar systems may be able to dynamically modify their operational parameters in response to changing environmental factors and threats, greatly enhancing detection precision and system adaptability.
As radar technologies continue to advance, computational demands and the complexity of integrating diverse technological components will also increase. The future research must address these challenges to ensure the practical realization and deployment of advancements, which involves developing effective computational frameworks and uniform integration techniques for various technologies all integrated into one radar system. The fusion of MIMO and beamforming with these innovative approaches is going to take radar systems into a new era, enhancing their capability to meet the complex challenges of detecting low RCS UAVs. As the threat environment in the air continues to evolve, radar technologies are being developed to identify and eliminate these threats, providing continuous protection and monitoring in a rapidly changing landscape.
7. Conclusions
This paper presents an analysis of beamforming and MIMO technologies, highlighting them as cutting-edge approaches for low RCS UAV detection. An in-depth review of the literature and a critical evaluation of the recent technological advancements demonstrate that MIMO, with its improved spatial resolution, and beamforming, with its accurate signal directivity, represent significant improvements over conventional radar systems. However, this comparative study also highlights the inherent difficulties that come with each technology, providing the framework for a more sophisticated comprehension of their potential applications.
MIMO technology is popular for its spatial diversity and multiplexing, which greatly improve target resolution and discrimination and assist to detect and track low RCS UAVs. This makes it very efficient in environments that require precision in detail, but more optimization is required due to its complexity and susceptibility to interference. On the other hand, beamforming works best in situations where focused signal transmission and clutter rejection are required. Its focused energy level enhances SCR and is crucial in cluttered environments. However, its effectiveness in dynamic situations requiring extensive coverage may be limited by the fixed patterns and demands for precise beam steering, highlighting areas for integrated research and development.
To overcome individual limitations and achieve their integrated advantages in radar system design and UAV detection, future research directions promise to explore the potential of the fusion of MIMO and beamforming. The development of more intelligent, flexible, and efficient radar systems is positioned to completely change how we respond to the sophisticated aerial threats posed by low RCS UAVs. This is demonstrated by the investigation of new radar system designs and the fusion with cutting-edge technologies like AI and quantum radar.
Author Contributions
Investigation, N.R.; methodology, N.R.; supervision, G.S.; writing—original draft, N.R.; writing—review and editing, G.S. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
Data are contained within the article.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Bergin, J.; Guerci, J.R. MIMO Radar: Theory and Application; Artech House: Boston, MA, USA, 2018. [Google Scholar]
- Wang, J.; Liu, Y.; Song, H. Counter-Unmanned Aircraft System(s) (C-UAS): State of the Art, Challenges, and Future Trends. IEEE Aerosp. Electron. Syst. Mag. 2021, 36, 4–29. [Google Scholar] [CrossRef]
- Nichols, R.K.; Mumm, H.C.; Lonstein, W.D.; Ryan, J.J.; Carter, C.; Hood, J.P. Counter Unmanned Aircraft Systems Technologies and Operations; New Prairie Press: Manhattan, KS, USA, 2020. [Google Scholar]
- Yousaf, J.; Zia, H.; Alhalabi, M.; Yaghi, M.; Basmaji, T.; Shehhi, E.A.; Gad, A.; Alkhedher, M.; Ghazal, M. Drone and Controller Detection and Localization: Trends and Challenges. Appl. Sci. 2022, 12, 12612. [Google Scholar] [CrossRef]
- Brown, A.D. Radar Challenges, Current Solutions, and Future Advancements for the Counter Unmanned Aerial Systems Mission. IEEE Aerosp. Electron. Syst. Mag. 2023, 38, 34–50. [Google Scholar] [CrossRef]
- Bean, B.R.; Dutton, E.; Warner, B. Weather effects on radar. In Radar Handbook; Environmental Research Laboratories, The University of Michigan: Ann Arbor, MI, USA, 1971. [Google Scholar]
- Pieraccini, M.; Miccinesi, L.; Rojhani, N. A Doppler range compensation for step-frequency continuous-wave radar for detecting small UAV. Sensors 2019, 19, 1331. [Google Scholar] [CrossRef] [PubMed]
- Coluccia, A.; Parisi, G.; Fascista, A. Detection and classification of multirotor drones in radar sensor networks: A review. Sensors 2020, 20, 4172. [Google Scholar] [CrossRef] [PubMed]
- Lykou, G.; Moustakas, D.; Gritzalis, D. Defending airports from UAS: A survey on cyber-attacks and counter-drone sensing technologies. Sensors 2020, 20, 3537. [Google Scholar] [CrossRef] [PubMed]
- Ezuma, M.; Anjinappa, C.; Semkin, V.; Guvenc, I. Comparative Analysis of Radar Cross Section Based UAV Classification Techniques. arXiv 2021, arXiv:2112.09774. [Google Scholar]
- Yang, Y.; Bai, Y.; Wu, J.N.; Wang, X.S. Experimental analysis of fully polarimetric radar returns of a fixed-wing UAV. IET Radar Sonar Navig. 2020, 14, 525–531. [Google Scholar] [CrossRef]
- Pieraccini, M.; Miccinesi, L.; Rojhani, N. RCS measurements and ISAR images of small UAVs. IEEE Aerosp. Electron. Syst. Mag. 2017, 32, 28–32. [Google Scholar] [CrossRef]
- Kapoulas, I.K.; Hatziefremidis, A.; Baldoukas, A.; Valamontes, E.S.; Statharas, J. Small Fixed-Wing UAV Radar Cross-Section Signature Investigation and Detection and Classification of Distance Estimation Using Realistic Parameters of a Commercial Anti-Drone System. Drones 2023, 7, 39. [Google Scholar] [CrossRef]
- Oh, B.S.; Lin, Z. Extraction of global and local micro-Doppler signature features from FMCW radar returns for UAV detection. IEEE Trans. Aerosp. Electron. Syst. 2020, 57, 1351–1360. [Google Scholar] [CrossRef]
- Liang, C.; Cao, N.; Lu, X.; Ye, Y. UAV detection using continuous wave radar. In Proceedings of the 2018 IEEE International Conference on Information Communication and Signal Processing (ICICSP), Singapore, 28–30 September 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–5. [Google Scholar]
- Cidronali, A.; Passafiume, M.; Colantonio, P.; Collodi, G.; Florian, C.; Leuzzi, G.; Pirola, M.; Ramella, C.; Santarelli, A.; Traverso, P. System level analysis of millimetre-wave gan-based mimo radar for detection of micro unmanned aerial vehicles. In Proceedings of the 2019 PhotonIcs & Electromagnetics Research Symposium-Spring (PIERS-Spring), Rome, Italy, 17–20 June 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 438–450. [Google Scholar]
- El-Shennawy, M.; Al-Qudsi, B.; Joram, N.; Ellinger, F. Fundamental limitations of phase noise on FMCW radar precision. In Proceedings of the 2016 IEEE International Conference on Electronics, Circuits and Systems (ICECS), Monte Carlo, Monaco, 11–14 December 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 444–447. [Google Scholar]
- Ayhan, S.; Scherr, S.; Bhutani, A.; Fischbach, B.; Pauli, M.; Zwick, T. Impact of frequency ramp nonlinearity, phase noise, and SNR on FMCW radar accuracy. IEEE Trans. Microw. Theory Tech. 2016, 64, 3290–3301. [Google Scholar] [CrossRef]
- Rezaei, M.; Mohammadpour-Aghdam, K. On postprocessing reduction of phase noise in FMCW radars. IEEE Trans. Microw. Theory Tech. 2020, 68, 5103–5114. [Google Scholar] [CrossRef]
- Yu, Q.; Rao, B.; Luo, P. Detection performance analysis of small target under clutter based on LFMCW radar. In Proceedings of the 2018 IEEE 3rd International Conference on Signal and Image Processing (ICSIP), Shenzhen, China, 13–15 July 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 121–125. [Google Scholar]
- Passafiume, M.; Rojhani, N.; Collodi, G.; Cidronali, A. Modeling small UAV micro-Doppler signature using millimeter-wave FMCW radar. Electronics 2021, 10, 747. [Google Scholar] [CrossRef]
- Nanzer, J.A.; Chen, V.C. Microwave interferometric and Doppler radar measurements of a UAV. In Proceedings of the 2017 IEEE Radar Conference (RadarConf), Seattle, WA, USA, 8–12 May 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1628–1633. [Google Scholar]
- Mazumder, J.; Raj, A.B. Detection and classification of UAV using propeller Doppler profiles for counter UAV systems. In Proceedings of the 2020 5th International Conference on Communication and Electronics Systems (ICCES), Coimbatore, India, 10–12 June 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 221–227. [Google Scholar]
- Balal, N.; Richter, Y.; Pinhasi, Y. Identifying low-RCS targets using micro-Doppler high-resolution radar in the millimeter waves. In Proceedings of the 2020 14th European Conference on Antennas and Propagation (EuCAP), Copenhagen, Denmark, 15–20 March 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–5. [Google Scholar]
- Pieraccini, M.; Rojhani, N.; Miccinesi, L. 2D and 3D-ISAR Images of a Small Quadcopter. In Proceedings of the 2017 European Radar Conference (EURAD), Nuremberg, Germany, 11–13 October 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 307–310. [Google Scholar]
- Aldowesh, A.; Alnuaim, T.; Alzogaiby, A. Slow-moving micro-UAV detection with a small scale digital array radar. In Proceedings of the 2019 IEEE Radar Conference (RadarConf), Boston, MA, USA, 22–26 April 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–5. [Google Scholar]
- Li, J.; Stoica, P. MIMO Radar Signal Processing; John Wiley & Sons: Hoboken, NJ, USA, 2008. [Google Scholar]
- Chen, C.Y. Signal Processing Algorithms for MIMO Radar; California Institute of Technology: Pasadena, CA, USA, 2009. [Google Scholar]
- Pieraccini, M.; Rojhani, N.; Miccinesi, L. MIMO Radar with Dense or Random Pattern: Analysis of Phase and Positioning Error Sensitivity. In Proceedings of the 2019 PhotonIcs & Electromagnetics Research Symposium-Spring (PIERS-Spring), Rome, Italy, 17–20 June 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1098–1105. [Google Scholar]
- Donnet, B.; Longstaff, I. MIMO radar, techniques and opportunities. In Proceedings of the Proceedings of the 2006 European Radar Conference, Manchester, UK, 13–15 September 2006; IEEE: Piscataway, NJ, USA, 2006; pp. 112–115. [Google Scholar]
- Li, J.; Stoica, P.; Xu, L.; Roberts, W. On parameter identifiability of MIMO radar. IEEE Signal Process. Lett. 2007, 14, 968–971. [Google Scholar]
- Bekar, M.; Baker, C.J.; Hoare, E.G.; Gashinova, M. Joint MIMO radar and communication system using a PSK-LFM waveform with TDM and CDM approaches. IEEE Sens. J. 2020, 21, 6115–6124. [Google Scholar] [CrossRef]
- Xue, B.; Zhang, G.; Dai, Q.; Fang, Z.; Leung, H. Waveform Diversity Design of OFDM Chirp for Miniature Millimeter-Wave MIMO Radar Based on Dechirp. IEEE Trans. Geosci. Remote Sens. 2023. [Google Scholar] [CrossRef]
- Brookner, E. MIMO versus conventional radar performance against jammers. In Proceedings of the 2017 IEEE Radar Conference (RadarConf), Seattle, WA, USA, 8–12 May 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 0703–0708. [Google Scholar]
- Instruments, T. MIMO Radar. 2018. Available online: https://www.ti.com/lit/an/swra554a/swra554a.pdf?ts=1702490011052&ref_url=https%253A%252F%252Fwww.google.com%252F (accessed on 19 January 2024).
- Chernyak, V. On the concept of MIMO radar. In Proceedings of the 2010 IEEE Radar Conference, Arlington, VA, USA, 10–14 May 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 327–332. [Google Scholar]
- Bliss, D.; Forsythe, K. Multiple-input multiple-output (MIMO) radar and imaging: Degrees of freedom and resolution. In Proceedings of the Thirty-Seventh Asilomar Conference on Signals, Systems & Computers, Pacific Grove, CA, USA, 9–12 November 2003; IEEE: Piscataway, NJ, USA, 2003; Volume 1, pp. 54–59. [Google Scholar]
- Hassanien, A.; Vorobyov, S. Phased-MIMO radar: A tradeoff between phased-array and MIMO radars. IEEE Trans. Signal Process. 2010, 58, 3137–3151. [Google Scholar] [CrossRef]
- Lehmann, N.; Haimovich, A.; Blum, R.; Cimini, L. High resolution capabilities of MIMO radar. In Proceedings of the 2006 Fortieth Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 29 October–1 November 2006; IEEE: Piscataway, NJ, USA, 2006; pp. 25–30. [Google Scholar]
- Robey, F.; Coutts, S.; Weikle, D.; McHarg, J.; Cuomo, K. MIMO radar theory and experimental results. In Proceedings of the Conference Record of the Thirty-Eighth Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 7–10 November 2004; IEEE: Piscataway, NJ, USA, 2004; Volume 1, pp. 300–304. [Google Scholar]
- Haimovich, A.; Blum, R.; Cimini, L. MIMO radar with widely separated antennas. IEEE Signal Process. Mag. 2007, 25, 116–129. [Google Scholar] [CrossRef]
- Fishler, E.; Haimovich, A.; Blum, R.; Cimini, L.; Chizhik, D.; Valenzuela, R. Spatial diversity in radars—Models and detection performance. IEEE Trans. Signal Process. 2006, 54, 823–838. [Google Scholar] [CrossRef]
- Brooker, G. Mutual interference of millimeter-wave radar systems. IEEE Trans. Electromagn. Compat. 2007, 49, 170–181. [Google Scholar] [CrossRef]
- Rojhani, N.; Passafiume, M.; Lucarelli, M.; Collodi, G.; Cidronali, A. Assessment of compressive sensing 2 × 2 mimo antenna design for millimeter-wave radar image enhancement. Electronics 2020, 9, 624. [Google Scholar] [CrossRef]
- Cassidy, S.; Pooni, S.; Cherniakov, M.; Hoare, E.; Gashinova, M. High-Resolution Automotive Imaging Using MIMO Radar and Doppler Beam Sharpening. IEEE Trans. Aerosp. Electron. Syst. 2022, 59, 1495–1505. [Google Scholar] [CrossRef]
- Sun, S.; Petropulu, A.; Poor, H. MIMO radar for advanced driver-assistance systems and autonomous driving: Advantages and challenges. IEEE Signal Process. Mag. 2020, 37, 98–117. [Google Scholar] [CrossRef]
- Bechter, J.; Rameez, M.; Waldschmidt, C. Analytical and experimental investigations on mitigation of interference in a DBF MIMO radar. IEEE Trans. Microw. Theory Tech. 2017, 65, 1727–1734. [Google Scholar] [CrossRef]
- Lishchenko, V.; Khudov, H.; Solomonenko, Y. Mimo technology in multi-radar systems for detecting stealthy air objects. In Proceedings of the Technology Transfer: Fundamental Principles and Innovative Technical Solutions, Tallinn, Estonia, 29 November 2022; pp. 21–23. [Google Scholar]
- Cheng, Z.; He, Z.; Liao, B. Hybrid beamforming for multi-carrier dual-function radar-communication system. IEEE Trans. Cogn. Commun. Netw. 2021, 7, 1002–1015. [Google Scholar] [CrossRef]
- Elbir, A.; Mishra, K.; Celik, A.; Eltawil, A. Millimeter-wave radar beamforming with spatial path index modulation communications. In Proceedings of the 2023 IEEE Radar Conference (RadarConf23), San Antonio, TX, USA, 1–5 May 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 1–6. [Google Scholar]
- Liu, F.; Masouros, C. Hybrid beamforming with sub-arrayed MIMO radar: Enabling joint sensing and communication at mmWave band. In Proceedings of the ICASSP 2019–2019 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Brighton, UK, 12–17 May 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 7770–7774. [Google Scholar]
- Liu, W.; Weiss, S. Wideband Beamforming: Concepts and Techniques; John Wiley & Sons: Hoboken, NJ, USA, 2010. [Google Scholar]
- Fu, W.; Jiang, D. Radar wideband digital beamforming based on time delay and phase compensation. Int. J. Electron. 2018, 105, 1144–1158. [Google Scholar] [CrossRef]
- Del-Rey-Maestre, N.; Mata-Moya, D.; Jarabo-Amores, M.P.; Almodóvar-Hernández, A.; Rosado-Sanz, J. DoA techniques in UAV detection with DVB-T based Passive Radar. In Proceedings of the 2023 IEEE International Radar Conference (RADAR), Sydney, Australia, 6–10 November 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 1–6. [Google Scholar]
- Barton, P. Digital beam forming for radar. In Proceedings of the IEE Proceedings F (Communications, Radar and Signal Processing); IET: London, UK, 1980; Volume 127, pp. 266–277. [Google Scholar]
- Kumari, P.; Myers, N.J.; Heath, R.W. Adaptive and fast combined waveform-beamforming design for mmWave automotive joint communication-radar. IEEE J. Sel. Top. Signal Process. 2021, 15, 996–1012. [Google Scholar] [CrossRef]
- Neoh, H.S.; Pritsker, D.; Lee, S.B. Time-Delay Digital Beamforming with 1.3 GHz Bandwidth Using Direct RF ADC. Time-Delay Digital Beamforming with 1.3 GHz Bandwidth Using Direct RF ADC, Dayton, OH, USA, 28–31 August 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 131–137. [Google Scholar]
- Gaudio, L.; Kobayashi, M.; Caire, G.; Colavolpe, G. Hybrid digital-analog beamforming and MIMO radar with OTFS modulation. arXiv 2020, arXiv:2009.08785. [Google Scholar]
- Elbir, A.M.; Mishra, K.V.; Chatzinotas, S. Terahertz-band joint ultra-massive MIMO radar-communications: Model-based and model-free hybrid beamforming. IEEE J. Sel. Top. Signal Process. 2021, 15, 1468–1483. [Google Scholar] [CrossRef]
- Chu, C.H.; Zhang, Q.; Chen, Y.J. MIMO radar waveform joint optimization in spatial-spectral domain for anti-interference. IEEE Access 2021, 9, 160383–160390. [Google Scholar] [CrossRef]
- Anajemba, J.H.; Tang, Y.; Ansere, J.A.; Sackey, S.H. Efficient switched digital beamforming radar system based on SIMO/MIMO receiver. In Proceedings of the 2019 Computing, Communications and IoT Applications (ComComAp), Shenzhen, China, 26–28 October 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 411–416. [Google Scholar]
- Feil, P.; Chaloun, T. Active switched antenna array for 77 GHz digital beamforming radar. In Proceedings of the 5th European Conference on Antennas and Propagation (EUCAP), Rome, Italy, 11–15 April 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 2951–2953. [Google Scholar]
- Cao, P. Pareto Optimal Analog Beamforming Design for Integrated MIMO Radar and Communication. IEEE Signal Process. Lett. 2022. [Google Scholar]
- Pfeffer, C.; Feger, R.; Wagner, C.; Stelzer, A. A multimode-beamforming 77-GHz FMCW radar system. In Proceedings of the 2013 IEEE MTT-S International Microwave Symposium Digest (MTT), Seattle, WA, USA, 2–7 June 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 1–4. [Google Scholar]
- Cheng, Z.; Liao, B.; He, Z.; Li, J.; Xie, J. Joint design of the transmit and receive beamforming in MIMO radar systems. IEEE Trans. Veh. Technol. 2019, 68, 7919–7930. [Google Scholar] [CrossRef]
- Younis, M.; De Almeida, F.; Villano, M.; Huber, S.; Krieger, G.; Moreira, A. Digital Beamforming for Spaceborne Reflector-Based Synthetic Aperture Radar, Part 2: Ultrawide-swath imaging mode. IEEE Geosci. Remote Sens. Mag. 2022, 10, 10–31. [Google Scholar] [CrossRef]
- Nguyen, M.; Feger, R.; Bechter, J.; Pichler-Scheder, M.; Stelzer, A. High angular resolution digital beamforming method for coherent FMCW MIMO radar networks. In Proceedings of the 2021 IEEE MTT-S International Microwave Symposium (IMS), Atlanta, GA, USA, 7–25 June 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 756–759. [Google Scholar]
- Younis, M.; De Almeida, F.Q.; Bordoni, F.; López-Dekker, P.; Krieger, G. Digital beamforming techniques for multi-channel synthetic aperture radar. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 1412–1415. [Google Scholar]
- Krieger, G.; Gebert, N.; Moreira, A. Multidimensional waveform encoding: A new digital beamforming technique for synthetic aperture radar remote sensing. IEEE Trans. Geosci. Remote Sens. 2007, 46, 31–46. [Google Scholar] [CrossRef]
- Song, N.; Yang, T.; Sun, H. Overlapped subarray based hybrid beamforming for millimeter wave multiuser massive MIMO. IEEE Signal Process. Lett. 2017, 24, 550–554. [Google Scholar] [CrossRef]
- Bertl, S.; Lopez-Dekker, P.; Younis, M.; Krieger, G. Equivalency of multiple beams and multiple phase centres for digital beamforming SAR systems. In Proceedings of the EUSAR 2014, 10th European Conference on Synthetic Aperture Radar, Berlin, Germany, 2–6 June 2014; VDE: Berlin, Germany, 2014; pp. 1–4. [Google Scholar]
- Zhu, J.; Wang, Z.; Li, Q.; Chen, H.; Ansari, N. Mitigating intended jamming in mmWave MIMO by hybrid beamforming. IEEE Wirel. Commun. Lett. 2019, 8, 1617–1620. [Google Scholar] [CrossRef]
- Zhang, Y.; Huang, Y.; Zhang, Y.; Liu, S.; Luo, J.; Zhou, X.; Yang, J.; Jakobsson, A. High-Throughput Hyperparameter-Free Sparse Source Location for Massive TDM-MIMO Radar: Algorithm and FPGA Implementation. IEEE Trans. Geosci. Remote Sens. 2023, 61, 5110014. [Google Scholar] [CrossRef]
- Sayed, A.N.; Ramahi, O.M.; Shaker, G. Detection and Classification of Drones using Radars, AI, and Full-Wave Electromagnetic CAD Tool; IntechOpen: London, UK, 2023. [Google Scholar]
- Sayed, A.N.; Ramahi, O.M.; Shaker, G. Machine Learning for UAV Classification Employing Mechanical Control Information. IEEE Trans. Aerosp. Electron. Syst. 2023, 60, 68–81. [Google Scholar] [CrossRef]
- Yang, F.; Xu, F.; Fioranelli, F.; Le Kernec, J.; Chang, S.; Long, T. Practical Investigation of a MIMO radar system capabilities for small drones detection. IET Radar Sonar Navig. 2021, 15, 760–774. [Google Scholar] [CrossRef]
- Yang, F.; Qu, K.; Hao, M.; Liu, Q.; Chen, X.; Xu, F. Practical investigation of a MIMO radar system for small drones detection. In Proceedings of the 2019 International Radar Conference (RADAR), Toulon, France, 23–27 September 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–5. [Google Scholar]
- Wellig, P.; Speirs, P.; Schuepbach, C.; Oechslin, R.; Renker, M.; Boeniger, U.; Pratisto, H. Radar systems and challenges for C-UAV. In Proceedings of the 2018 19th International Radar Symposium (IRS), Bonn, Germany, 20–22 June 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–8. [Google Scholar]
- Nuss, B.; Sit, L.; Fennel, M.; Mayer, J.; Mahler, T.; Zwick, T. MIMO OFDM radar system for drone detection. In Proceedings of the 2017 18th International Radar Symposium (IRS), Prague, Czech Republic, 28–30 June 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–9. [Google Scholar]
- Multerer, T.; Ganis, A.; Prechtel, U.; Miralles, E.; Meusling, A.; Mietzner, J.; Vossiek, M.; Loghi, M.; Ziegler, V. Low-cost jamming system against small drones using a 3D MIMO radar based tracking. In Proceedings of the 2017 European Radar Conference (EURAD), Nuremberg, Germany, 11–13 October 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 299–302. [Google Scholar]
- Klare, J.; Biallawons, O.; Cerutti-Maori, D. UAV detection with MIMO radar. In Proceedings of the 2017 18th International Radar Symposium (IRS), Prague, Czech Republic, 28–30 June 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–8. [Google Scholar]
- Yazici, A.; Baykal, B. Detection and Localization of Drones in MIMO CW Radar. IEEE Trans. Aerosp. Electron. Syst. 2023, 60, 226–238. [Google Scholar]
- Yang, F.; Xu, F.; Yang, X.; Liu, Q. DDMA MIMO radar system for low, slow, and small target detection. J. Eng. 2019, 2019, 5932–5935. [Google Scholar] [CrossRef]
- Klare, J.; Biallawons, O.; Cerutti-Maori, D. Detection of UAVs using the MIMO radar MIRA-CLE Ka. In Proceedings of the EUSAR 2016: 11th European Conference on Synthetic Aperture Radar, Hamburg, Germany, 6–9 June 2016; VDE: Berlin, Germany, 2016; pp. 1–4. [Google Scholar]
- Güvenç, I.; Ozdemir, O.; Yapici, Y.; Mehrpouyan, H.; Matolak, D. Detection, localization, and tracking of unauthorized UAS and jammers. In Proceedings of the 2017 IEEE/AIAA 36th Digital Avionics Systems Conference (DASC), St. Petersburg, FL, USA, 17–21 September 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–10. [Google Scholar]
- Besada, J.A.; Campaña, I.; Carramiñana, D.; Bergesio, L.; de Miguel, G. Review and simulation of counter-UAS sensors for unmanned traffic management. Sensors 2021, 22, 189. [Google Scholar] [CrossRef] [PubMed]
- Chen, X.; Chen, B.; Guan, J.; Huang, Y.; He, Y. Space-range-Doppler focus-based low-observable moving target detection using frequency diverse array MIMO radar. IEEE Access 2018, 6, 43892–43904. [Google Scholar] [CrossRef]
- Yang, T.; De Maio, A.; Zheng, J.; Su, T.; Carotenuto, V.; Aubry, A. An adaptive radar signal processor for UAVs detection with super-resolution capabilities. IEEE Sens. J. 2021, 21, 20778–20787. [Google Scholar] [CrossRef]
- Spencer, J.C. A Compact Phased Array Radar for UAS Sense and Avoid; Brigham Young University: Provo, UT, USA, 2015. [Google Scholar]
- Jian, M.; Lu, Z.; Chen, V.C. Drone detection and tracking based on phase-interferometric Doppler radar. In Proceedings of the 2018 IEEE Radar Conference (RadarConf18), Oklahoma City, OK, USA, 23–27 April 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1146–1149. [Google Scholar]
- Zhang, Y.; Wang, G.; Peng, S.; Leng, Y.; Yu, G.; Wang, B. Near-Field Beamforming Algorithms for UAVs. Sensors 2023, 23, 6172. [Google Scholar] [CrossRef] [PubMed]
- Li, H.; Ding, Z.; Tian, S.; Jin, S. Transmit Beam Control in Low-Altitude Slow-Moving Small Targets Detection Based on Peak to Average Power Ratio Constraint. Electronics 2022, 11, 3456. [Google Scholar] [CrossRef]
- Jarabo-Amores, M.P.; Mata-Moya, D.; Gómez-del Hoyo, P.J.; del Rey-Maestre, N.; Rosado-Sanz, J. On the impact of drone airscrews signature on passive radar detection and tracking stages. In Proceedings of the 2020 IEEE Radar Conference (RadarConf20), Florence, Italy, 21–25 September 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–6. [Google Scholar]
- Cai, L.; Qian, H.; Xing, L.; Zou, Y.; Qiu, L.; Liu, Z.; Tian, S.; Li, H. A Software-Defined Radar for Low-Altitude Slow-Moving Small Targets Detection Using Transmit Beam Control. Remote Sens. 2023, 15, 3371. [Google Scholar] [CrossRef]
- Del Rey-Maestre, N.; Mata-Moya, D.; Jarabo-Amores, M.P.; Gomez-del Hoyo, P.J.; Rosado-Sanz, J. Optimum Beamforming to Improve UAV’s Detection Using DVB-T Passive Radars. In Proceedings of the 2019 International Radar Conference (RADAR), Toulon, France, 23–27 September 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–6. [Google Scholar]
- Al-Nuaim, T.; Alam, M.; Aldowesh, A. Low-cost implementation of a multiple-input multiple-output radar prototype for drone detection. In Proceedings of the 2019 International Symposium ELMAR, Zadar, Croatia, 23–25 September 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 183–186. [Google Scholar]
- Paredes, J.A.; Álvarez, F.J.; Hansard, M.; Rajab, K.Z. A Gaussian Process model for UAV localization using millimetre wave radar. Expert Syst. Appl. 2021, 185, 115563. [Google Scholar] [CrossRef]
- Nie, W.; Han, Z.C.; Li, Y.; He, W.; Xie, L.B.; Yang, X.L.; Zhou, M. UAV detection and localization based on multi-dimensional signal features. IEEE Sens. J. 2021, 22, 5150–5162. [Google Scholar] [CrossRef]
- Khawaja, W.A.G. A Survey on Radar Techniques for Detection, Tracking, and Classification of Aerial Threats. Authorea Prepr. 2023. [Google Scholar]
- Tierney, B.B.; States, N.R.L.W.D.W.U. 3D MIMO Radar Prototype for UAV Swarming, Tracking, and Collision Avoidance: Karle Fellowship Final Report; Naval Research Lab: Washington, DC, USA, 2019. [Google Scholar]
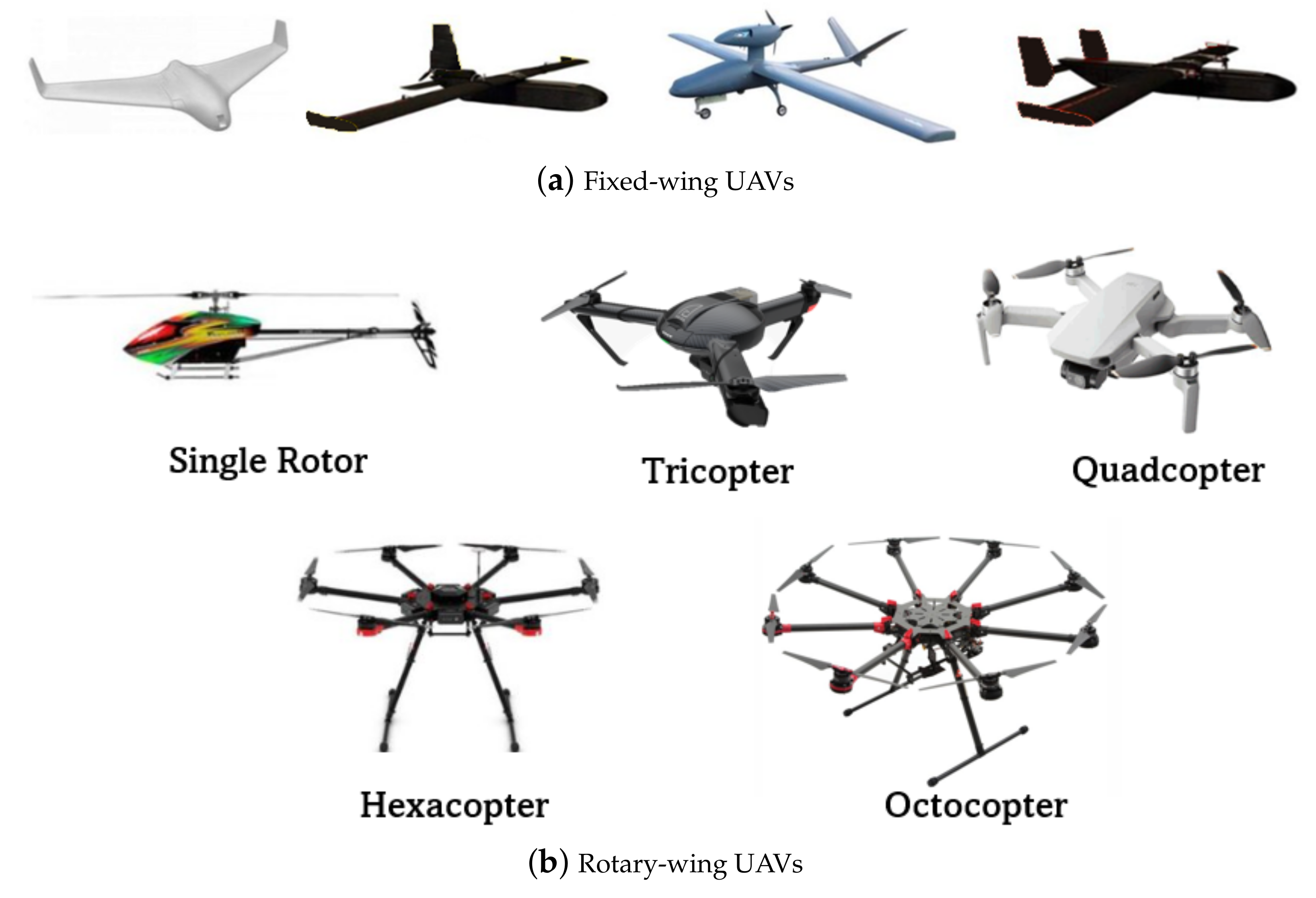
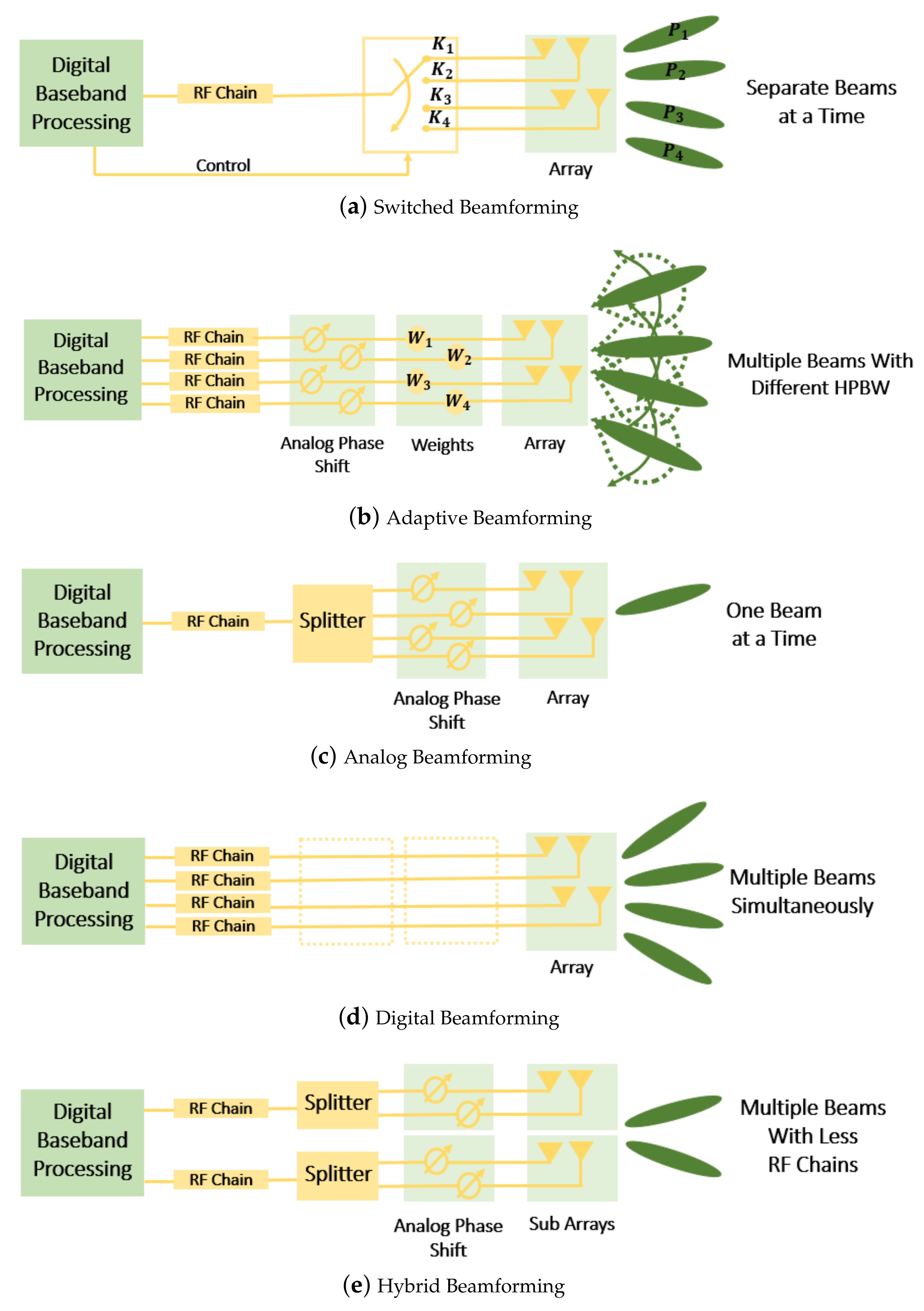
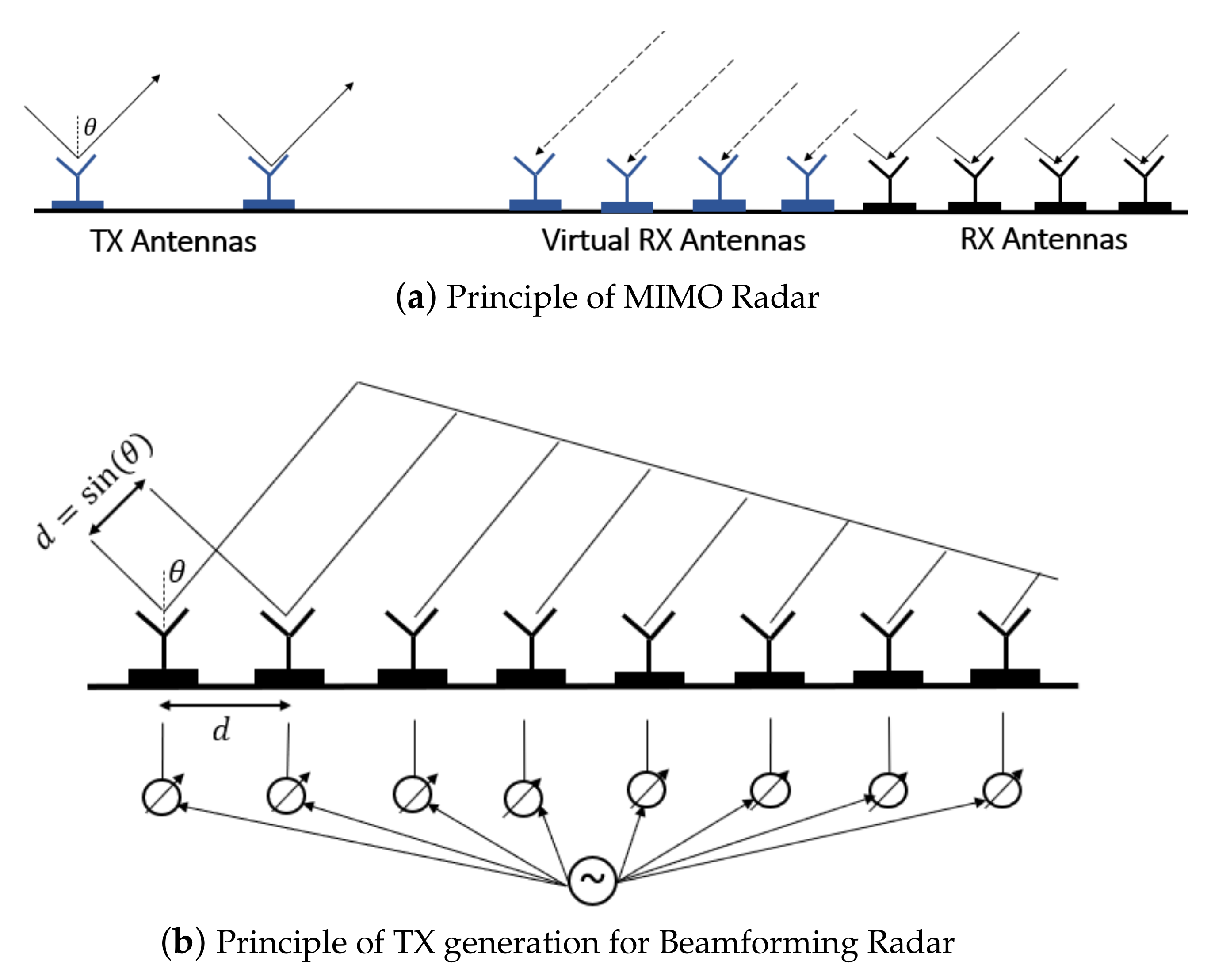
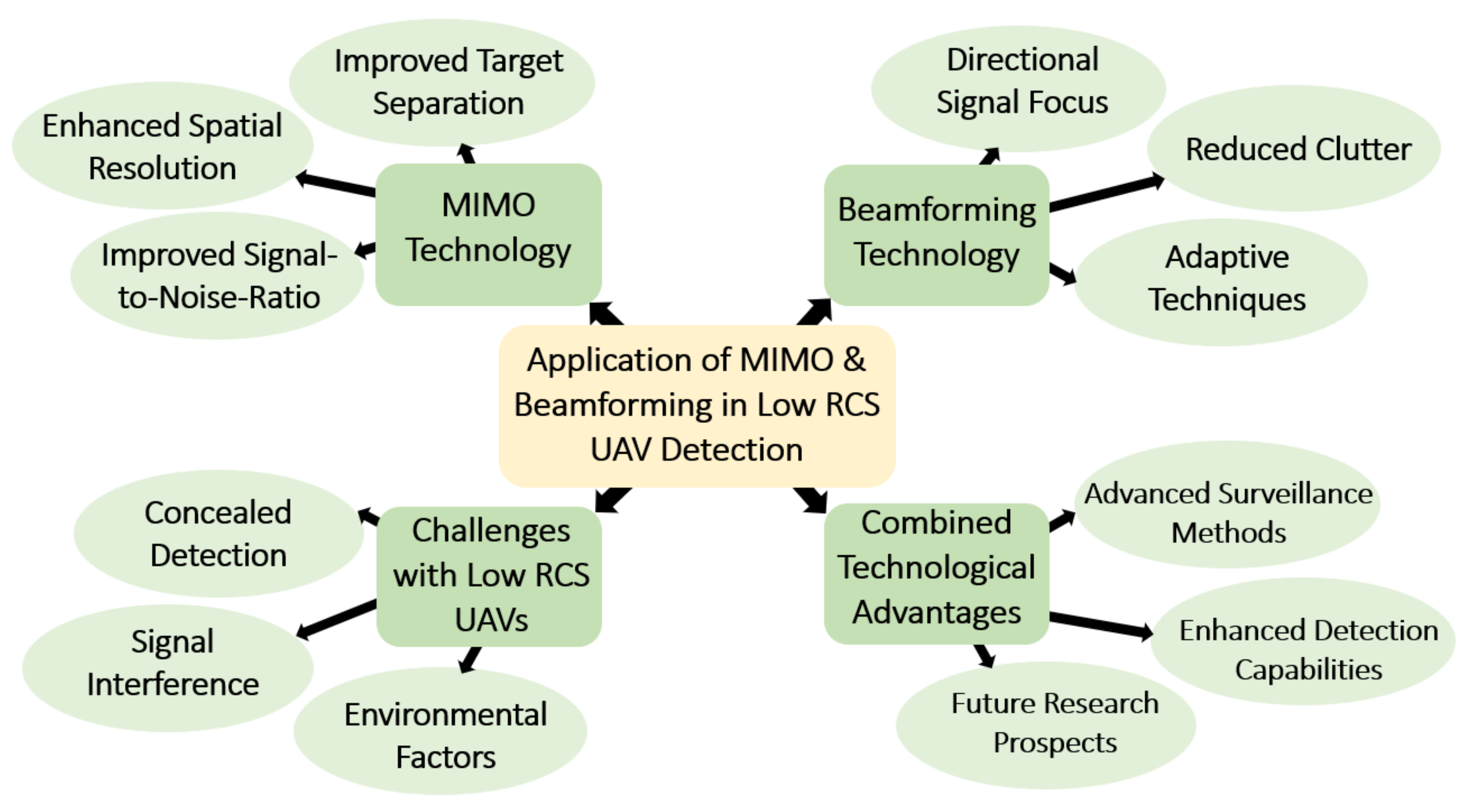
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).