1. Introduction
In recent decades, airborne light detection and ranging (LiDAR) systems have been rapidly developed. LiDAR is capable of penetrating vegetation to obtain terrain elevations in forest areas and quickly acquire high-density and high-precision 3D spatial data [
1]. These systems provide advantages compared with traditional photogrammetric methods. Thus, airborne LiDAR has been widely used in various applications, such as the reconstruction of digital terrain models (DTMs) [
2,
3,
4,
5,
6], forest surveying [
7,
8], power line patrolling [
9,
10], and 3D city modeling [
11,
12]. The ground and nonground points in the original LiDAR data must be separated before these applications, which is referred to as point cloud filtering [
13,
14]. Owing to the complex terrain (e.g., large undulations, steep slopes, cliffs, and sharp ridges) and the presence of various nonground objects, achieving high accuracy point cloud filtering is a challenging task [
15]. Many methods have been proposed for filtering point clouds, which can be broadly classified into three categories: slope-, morphology-, and surface-based methods.
Slope-based methods assume that the height difference between ground points is gradual, whereas this difference between ground points and nonground points, such as buildings and vegetation, is steep. Ground points can be extracted by setting a threshold to determine slope changes. Vosselman et al. [
16] first proposed a slope-based filtering method that identifies ground points by comparing the slopes between a point and its neighbors. To increase the adaptability of the algorithm to complex terrain, adaptive thresholding strategies for slope-based filtering have been proposed [
3,
4,
17]. These methods cannot select a reasonable threshold in complex terrain, and only slope change information is used. Thus, filter performance may degrade for terrain with large undulations and steep slopes [
18].
Morphology-based methods are used to remove nonground objects from the original point cloud using morphological operations such as erosion, expansion, open, and close. The nonground objects are filtered by comparing the elevation differences between original and morphological open surfaces. However, selecting an appropriate window size for morphological operation is crucial [
19]. A small window may not filter out large nonground features, such as buildings, whereas a large window may erase terrain details. Zhang et al. [
20] proposed a progressive morphological filtering (PMF) method that optimizes the adaptability of the morphological method by gradually changing the window size of the morphological operation. The elevation difference threshold is determined using the corresponding window size and the terrain slope, which are assumed to be constant. To widen the applicability of this method to the terrain of various slopes, Chen et al. [
21] introduced a set of tunable parameters that describe the local terrain topography. Furthermore, various techniques, such as gradient constraint [
22], white top-hat transform [
23], image processing [
24], and multilevel interpolation [
25], have been employed to improve filtering performance. Morphology-based filtering methods are simple and easy to implement, and they can remove small nonground objects attached to the ground. However, terrain with a variety of nonground objects may pose a challenge for morphological filters, because properly setting the structuring element can be difficult [
26].
Surface-based methods construct a surface model that approximates the ground surface and extract points close to the surface as ground points [
27]. The common algorithms used for surface construction include the triangulated irregular network (TIN) [
2,
28,
29,
30], cloth simulation [
31], and thin plate spline (TPS) [
5,
13,
32]. Progressive TIN densification filtering (PTDF) is used to extract ground points by densifying a TIN constructed from selected seeds. This algorithm was first proposed by Axelsson et al. [
2] and achieved the best results among eight methods in an experimental comparison conducted by Sihole and Vosselman [
15]. Zhao et al. [
28] improved the performance of PTDF in forested areas by optimizing seed selection using the morphological method. Zhang et al. [
30] enhanced this algorithm by incorporating smoothness-constrained segmentation to preserve ground measurements and reduce errors. Nie et al. [
29] revised the PTDF densification process and better preserved the ground points in steep areas and removed small objects attached to the ground. Zhang et al. [
31] proposed cloth simulation filtering (CSF), which simulates a piece of cloth using a particle-constraint model that gradually falls to an inverted point cloud under the effect of gravity. The final shape of the cloth is determined by the inner forces and the interaction between the cloth and the point cloud. Under ideal circumstances, the final cloth shape is a precise approximation of the terrain. CSF achieved satisfactory accuracy for most terrain types, but postprocessing was necessary for steep terrain. Additionally, CSF cannot distinguish objects that are connected to the ground (e.g., bridges). In general, these methods are more accurate because they use more neighborhood information and perform well for flat terrain, but the missing complex terrain details and the misclassification of small nonground objects are issues that still need to be addressed [
26].
To increase the reliability of surface-based methods for complex terrain, a multiscale strategy was designed by eliminating large nonground features while preserving terrain detail by fitting the surface at varying scales. Mongus et al. [
5] generated surfaces using the TPS algorithm at different scales with a bottom-up approach. Top-hat transformation was used to enhance the discontinuities caused by surface objects. Additionally, automatic thresholding based on the standard deviation was used to achieve parameter-free ground point filtering. Chen et al. [
32] employed a top-down approach with three levels of hierarchy to filter the point cloud, selecting seeds and applying the TPS algorithm to interpolate the surfaces in each level. The ground points were identified by evaluating the residuals between the points and the surface. Hu et al. [
13] proposed a novel adaptive surface filter (ASF) to process LiDAR point clouds using a progressive densification strategy, regularization, and self-adaption. Data pyramids were constructed with a small step factor, and regularization was used to eliminate noise during the interpolation of TPS surfaces. An adaptive threshold determination algorithm was used that incorporates a bending energy function to explicitly depict terrain smoothness. Mongus et al. [
11] conducted multiscale data decomposition by forming a top-hat scale space using differential morphological profiles (DMPs) on the point residuals of the approximated surface. The ground was extracted and the buildings were detected simultaneously using the geometric attributes of the contained features estimated from the DMPs. Overall, the introduction of the multiscale strategy led to substantially increased accuracy in point cloud filtering, particularly in scenarios with complex features. By gradually adjusting the scale, the nonground objects of different sizes can be effectively filtered while retaining terrain detail. However, this strategy may be time-consuming due to the computation required at various scales.
In recent years, several learning-based pipelines have been used to classify point clouds into ground and nonground points. Jin et al. [
33] employed a point-based fully convolutional neural network (PFCN) to filter point clouds in forested environments. Zhang et al. [
6] utilized a graph convolution network to filter point clouds in forest areas. Qin et al. [
34] assessed the performance of four 3D deep neural networks (PointNet++ [
35], KPconv [
36], RandLA-Net [
37], and SCF-Net [
38]) using the OpenGF dataset. The study results showed that learning-based pipelines outperformed classical filtering methods in most scenarios, particularly in forested environments with hybrid terrain. However, in urban environments, the networks may struggle to recognize large objects and are less accurate than classical methods.
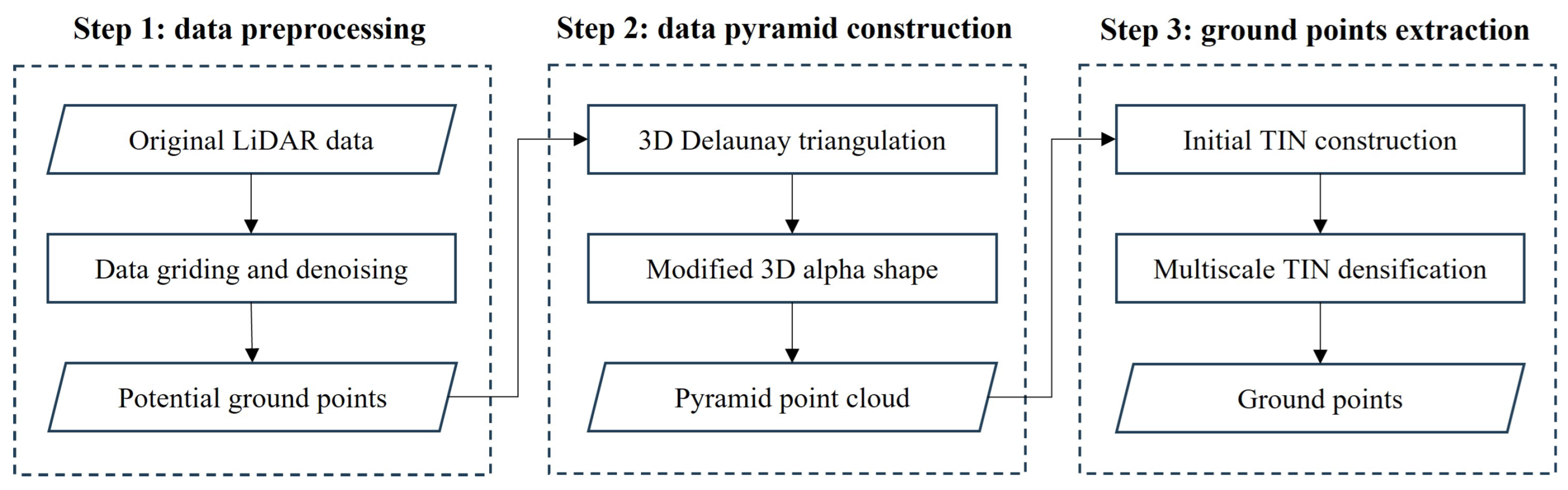
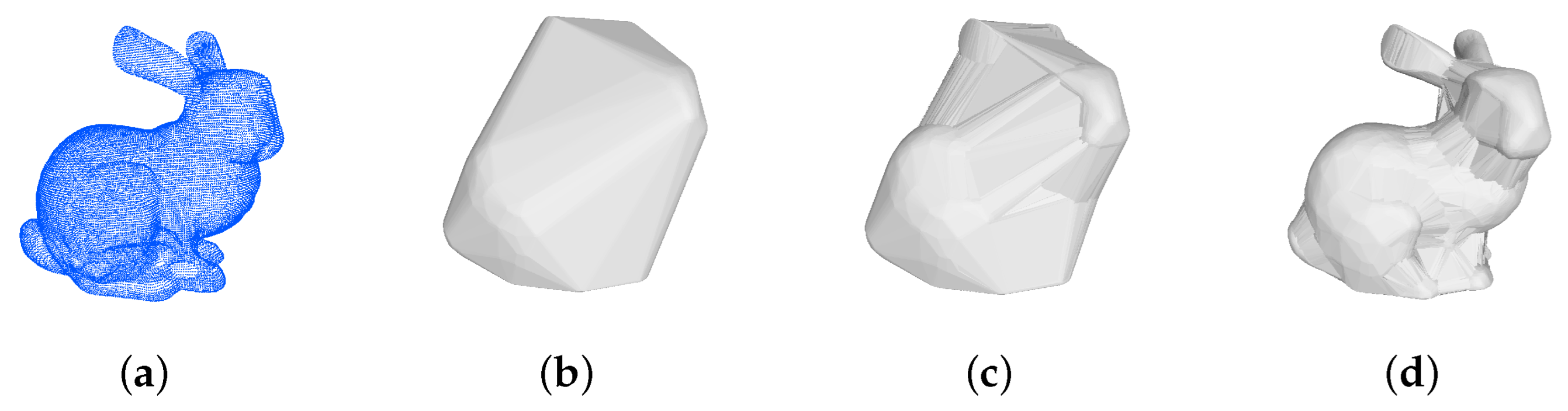
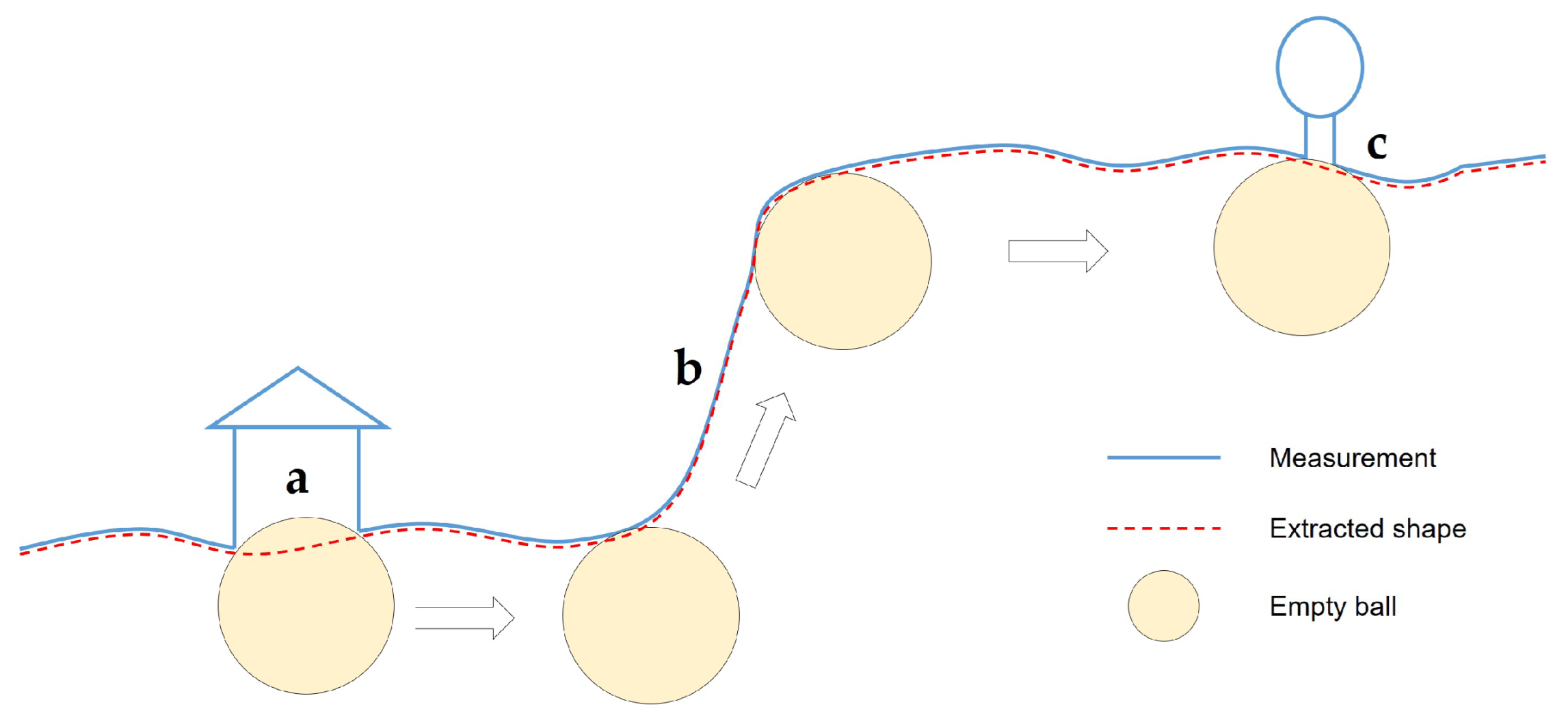
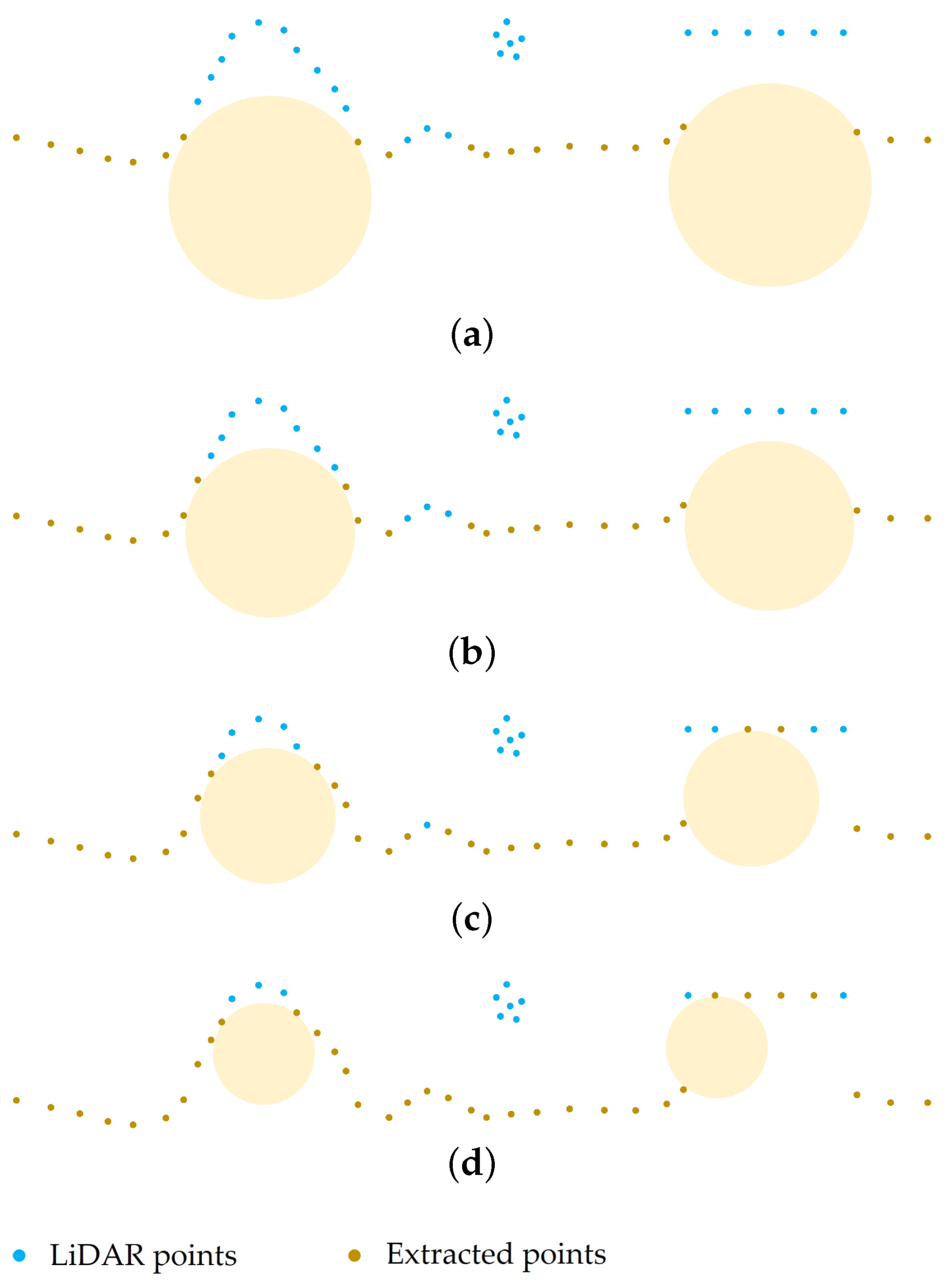
To reliably filter results for complex terrain and steep areas, we developed a filtering method called multiscale alpha shape filtering (MASF). MASF involves three key approaches: in addition to the multiscale comparison strategy and TIN densification mentioned above, the other key approach is the 3D alpha shape algorithm. The alpha shape is widely used to extract the boundary of an unorganized set of points in two or three dimensions [
39]. The extraction of geometric boundaries of objects or parts in a point cloud, such as line segments [
40] and contours [
41], is a fundamental problem in point cloud processing. This allows for more accurate segmentation and surface reconstruction [
42]. The 3D alpha shape was first applied for point cloud filtering by Ma et al. by combining the ball pivot algorithm (BPA) and spatial sorting [
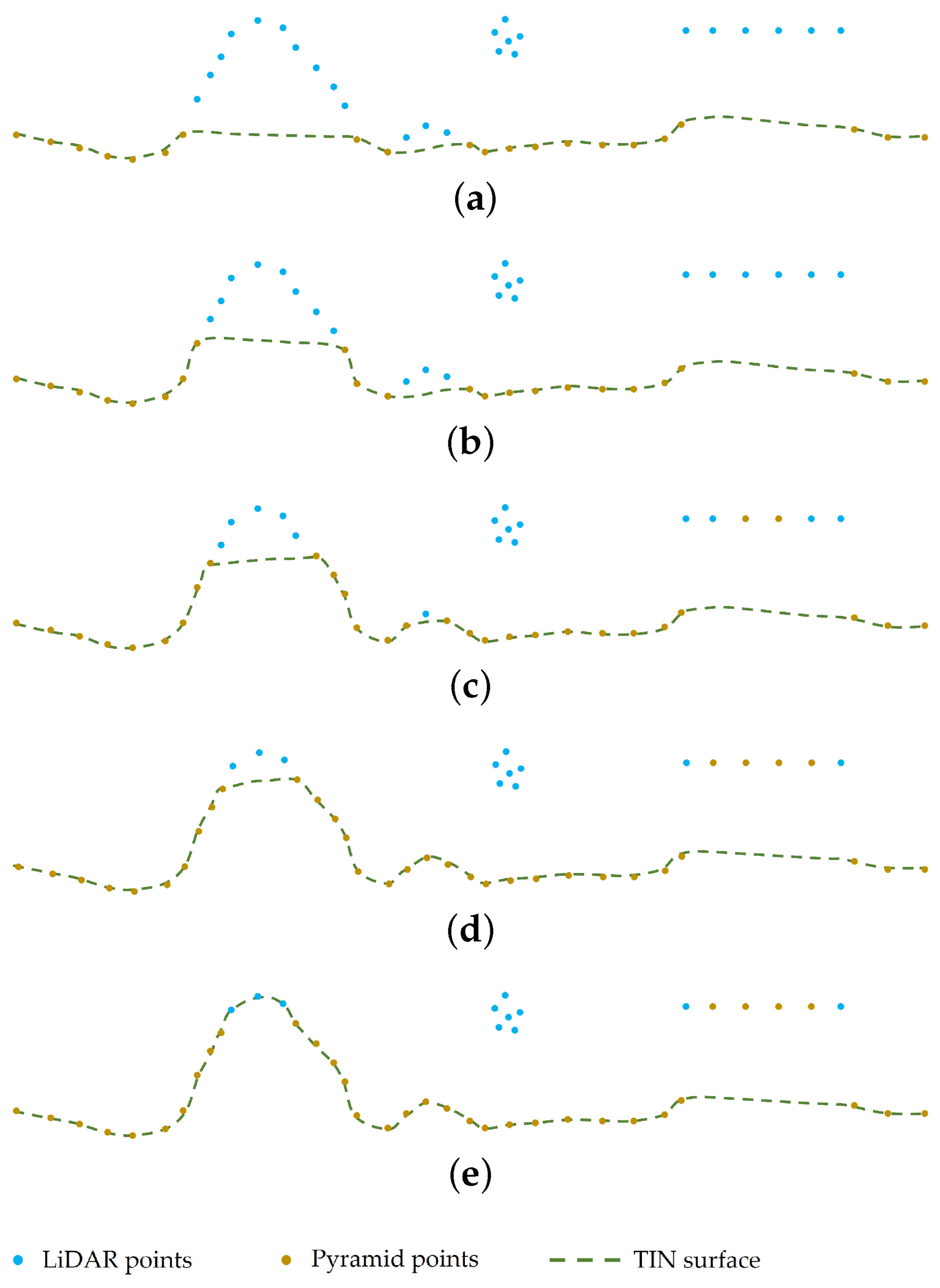
43]. The nonground points are filtered via an improved BPA traversing all the grids. In this study, we developed a novel application of the 3D alpha shape to filtering. The process of deriving a 3D alpha shape from the underlying Delaunay triangulation is modified by adding extra constraints. A data pyramid consisting of multiscale point layers is constructed using the proposed modified 3D alpha algorithm, and ground points are extracted using top-down multiscale TIN densification.
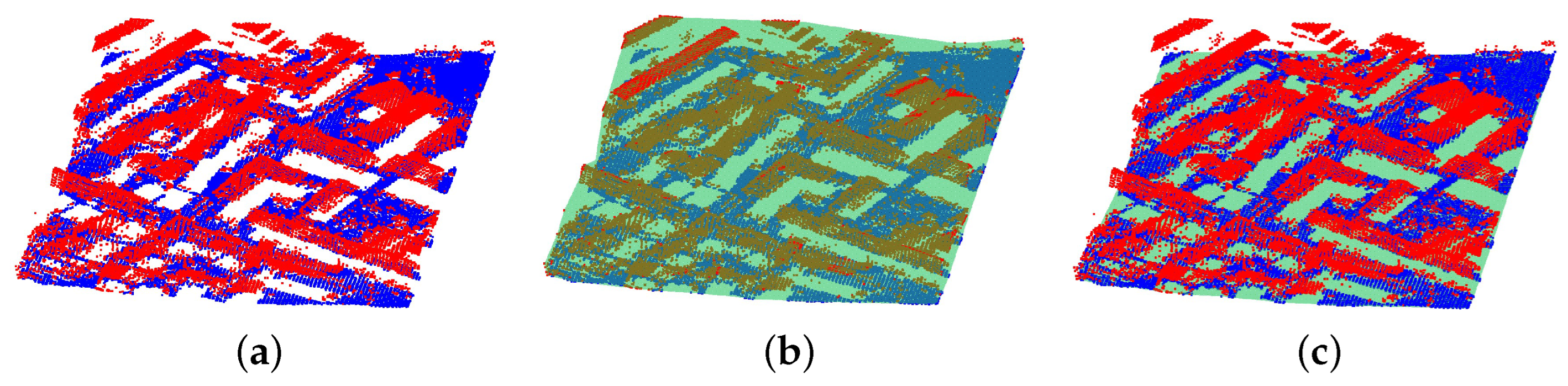
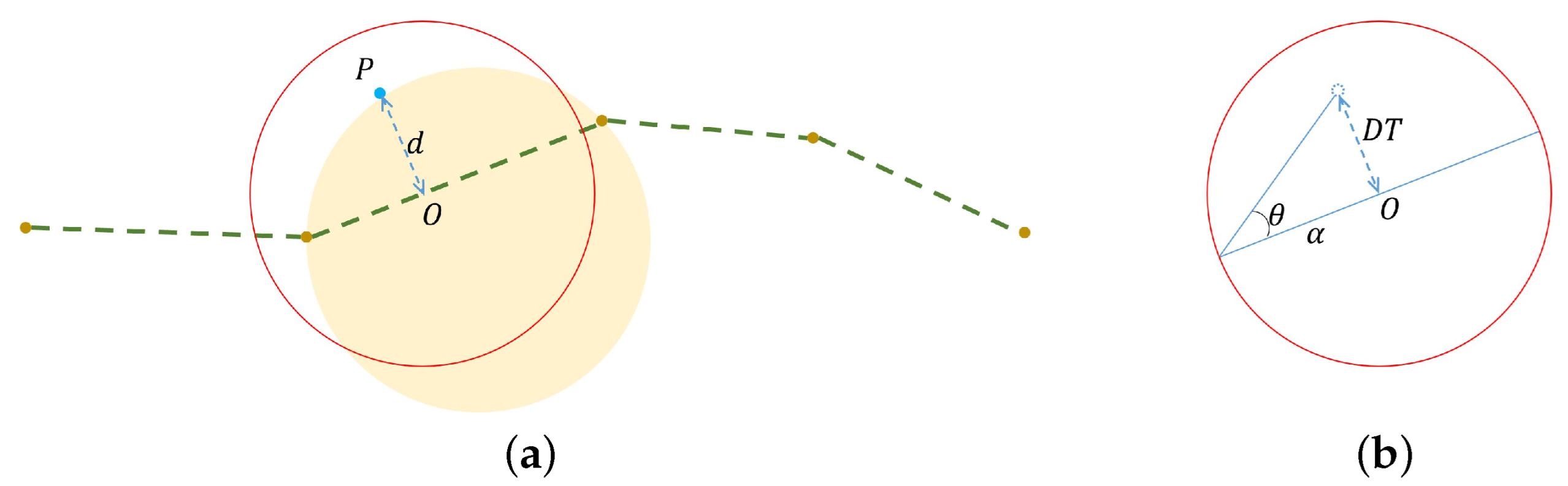
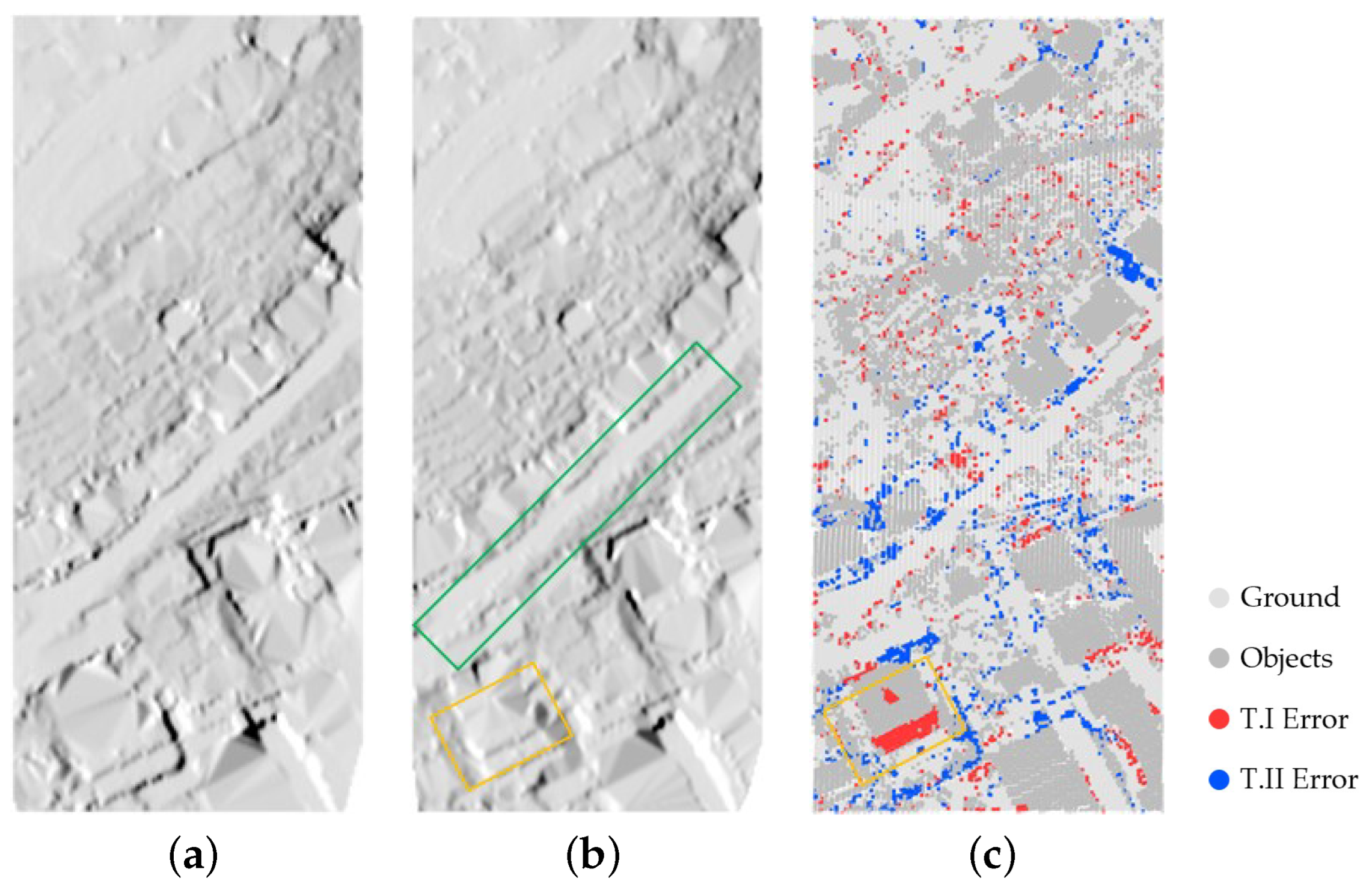
Compared with existing filtering algorithms, the proposed method is innovative in the following two aspects: (1) The data pyramid is built using a novel approach based on the 3D alpha shape. Ground undulations and nonground object points are arranged into point cloud layers at multiple scales based on their size. Compared with using the lowest grid points, this modified 3D alpha shape algorithm is more robust for steep slopes, including cliffs. (2) A multiscale TIN densification approach is used to extract ground points from the pyramid point cloud. The distance thresholds are adaptively determined at each scale, effectively increasing the extraction accuracy in complex scenarios compared with that of classical PTDF. The performance of MASF was quantitatively evaluated using the widely used benchmark dataset provided by the International Society for Photogrammetry and Remote Sensing (ISPRS) commission [
15] and an ultra-large-scale ground filtering dataset named OpenGF [
44]. The results of the proposed method were compared with those of some classical filtering methods and deep learning pipelines.
The rest of this paper is structured as follows:
Section 2 provides a detailed introduction to the proposed method, including the filtering process and parameter determination.
Section 3 presents the experimental results and their analysis. Finally,
Section 4 discusses the proposed algorithm. The conclusions are summarized in
Section 5.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}