
Infrared Maritime Small-Target Detection Based on Fusion Gray Gradient Clutter Suppression


Abstract
1. Introduction
2. Small-Target Detection Based on Fusion Gray Gradient Clutter Suppression
2.1. Harmonic Contrast Map
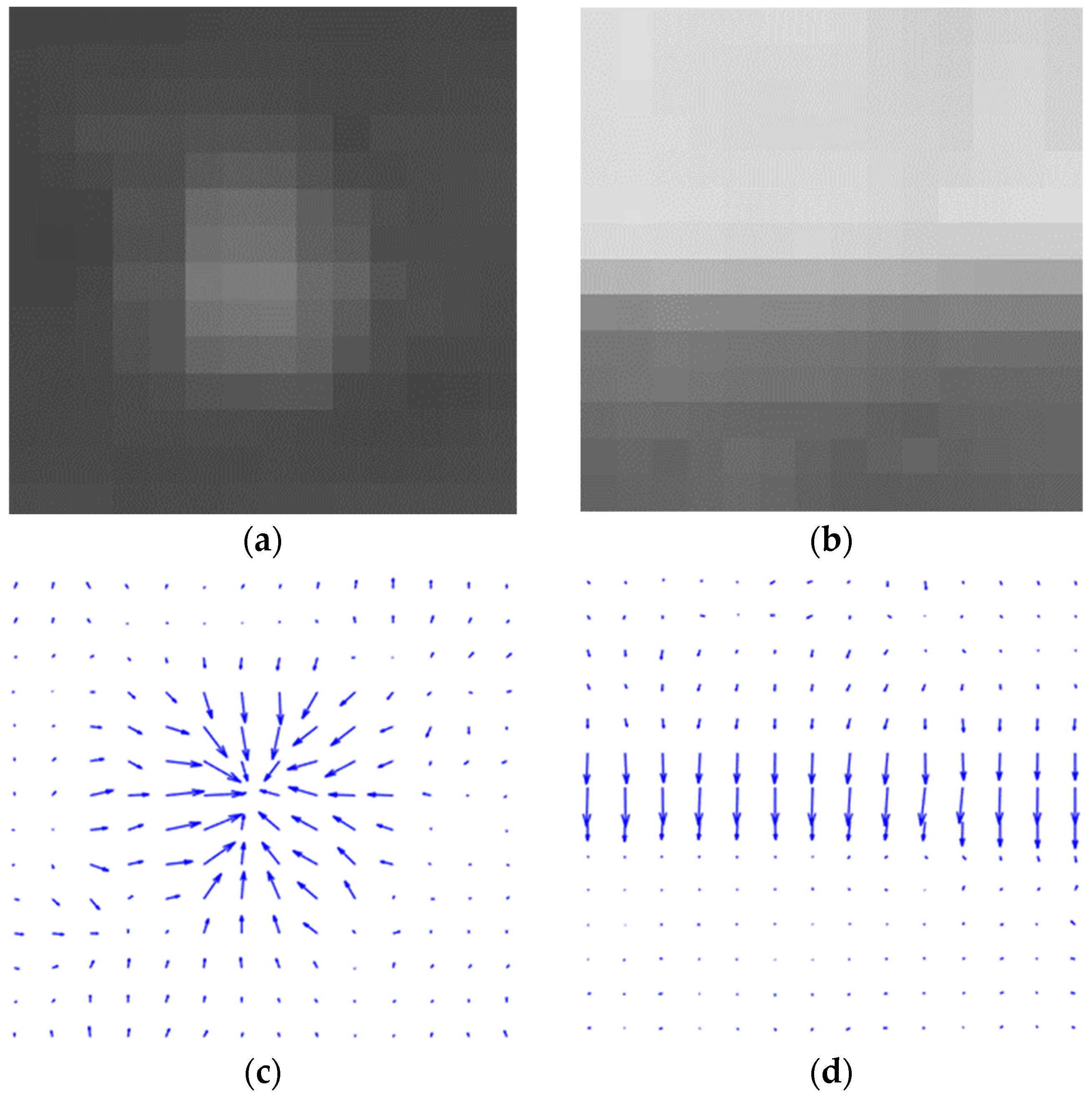
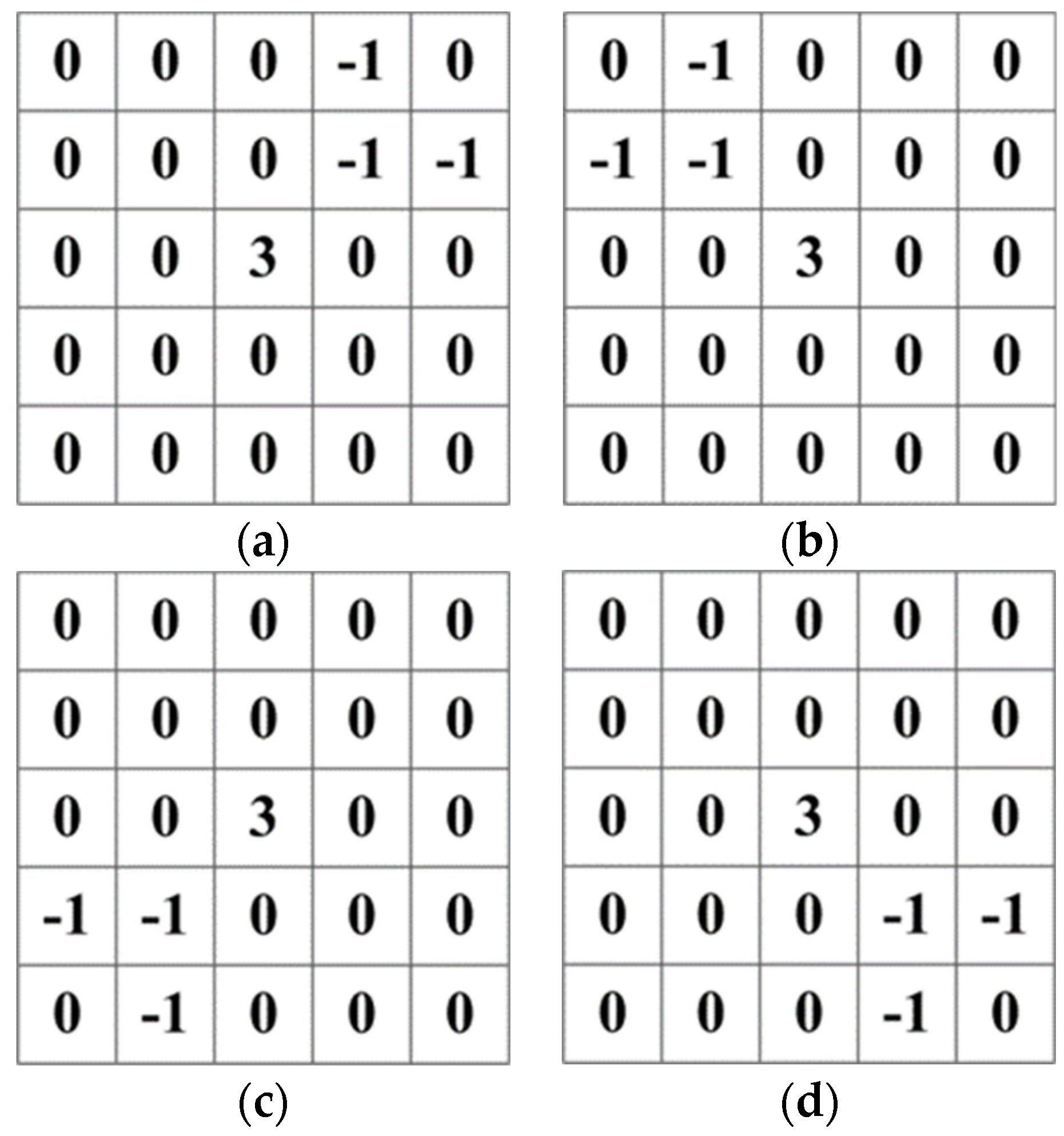
2.2. Local Gradient Difference Measure
2.3. Fusion Grayscale Gradient Clutter Suppression
2.4. Target Detection
3. Simulation Experiments and Discussion
3.1. Test Dataset and Metrics
3.1.1. Test Dataset
3.1.2. Metrics
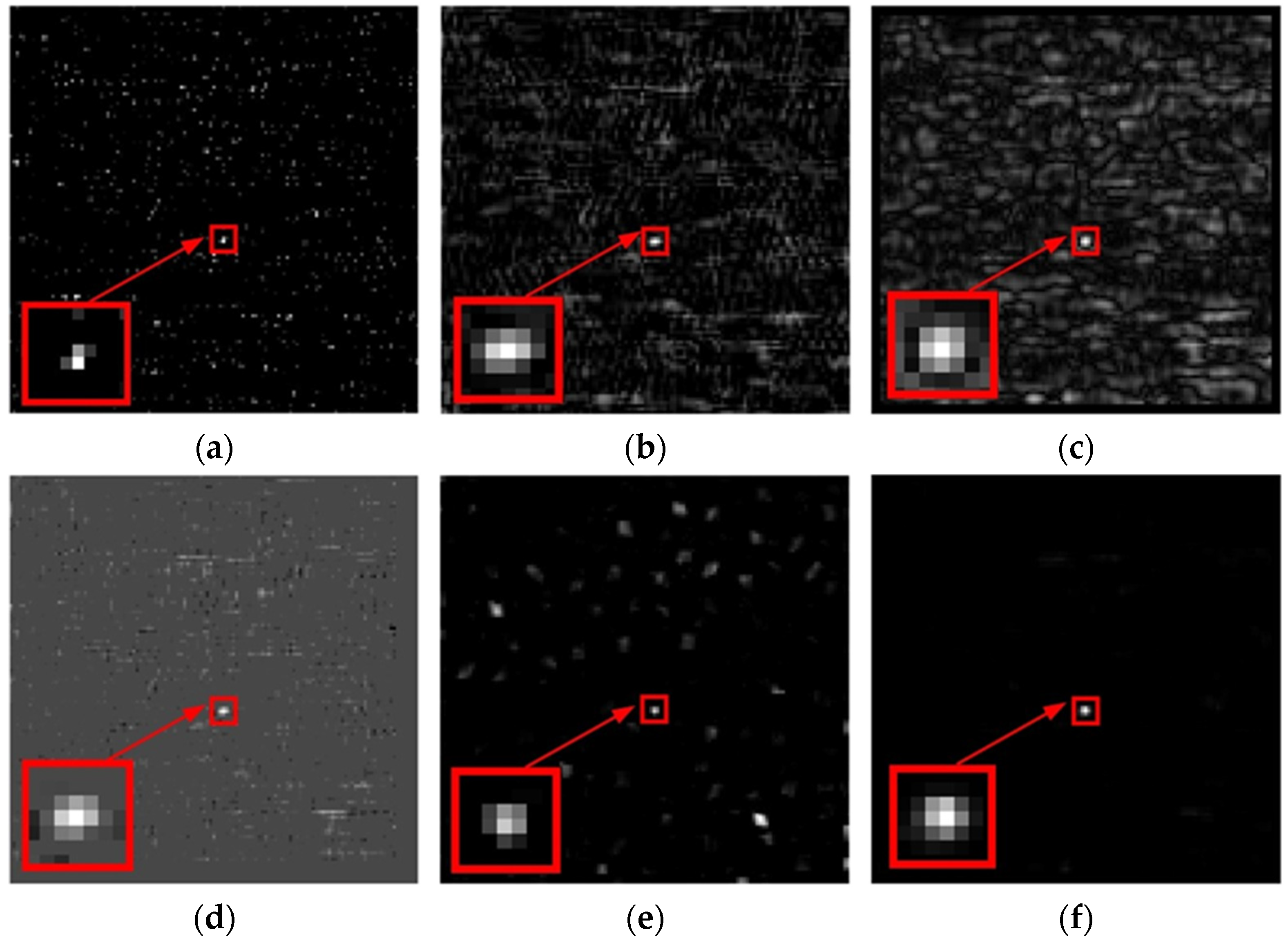
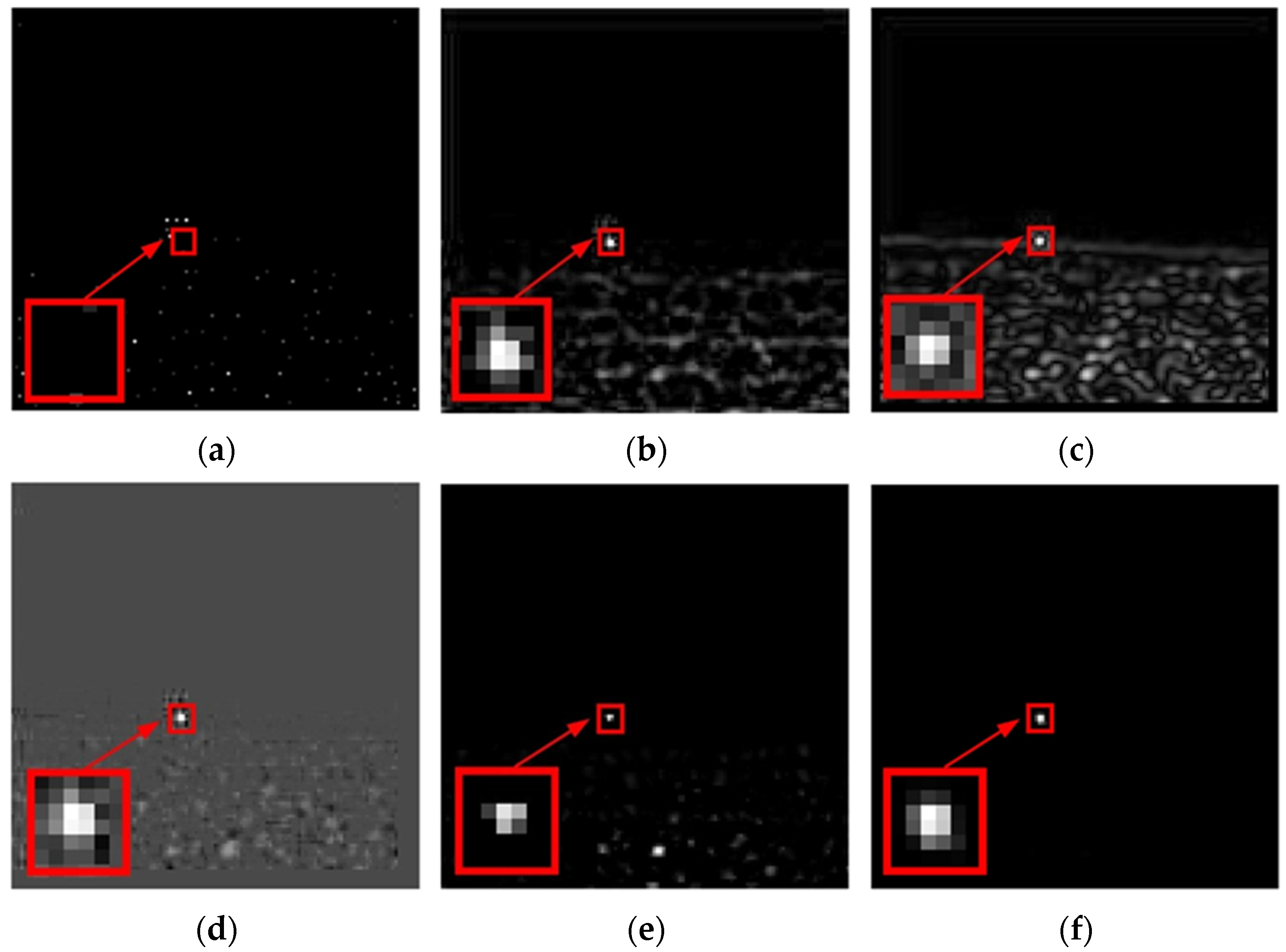
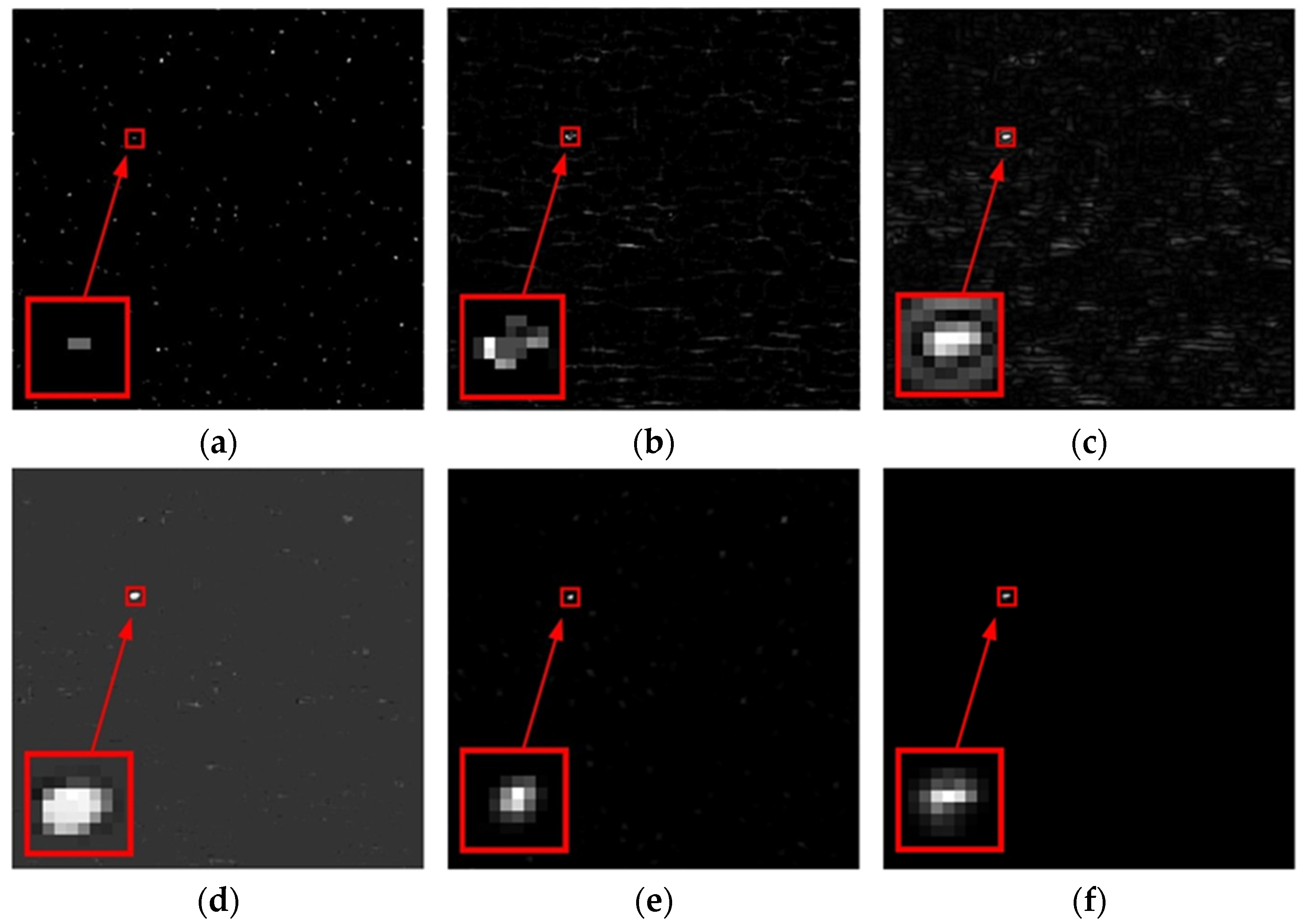
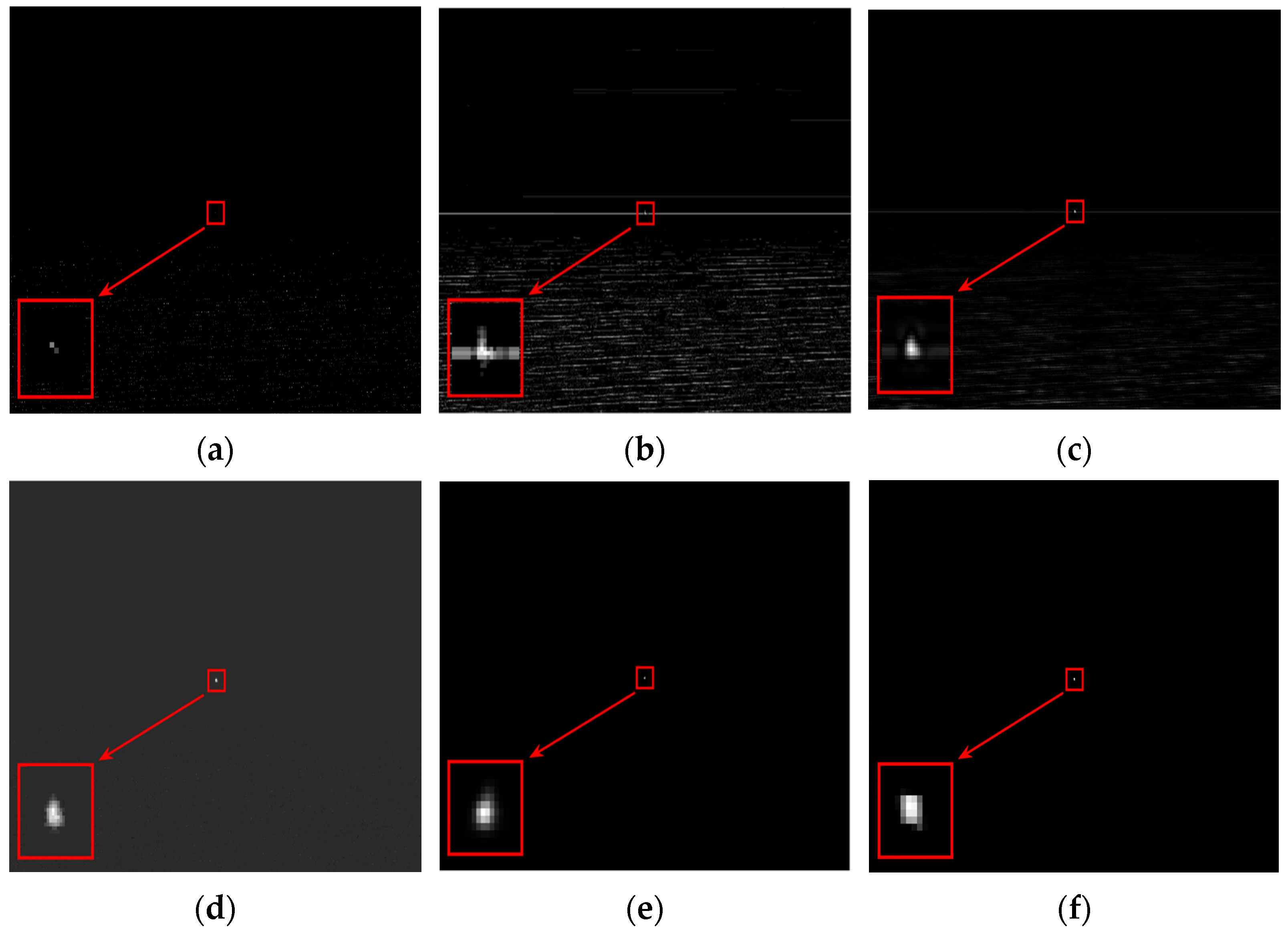
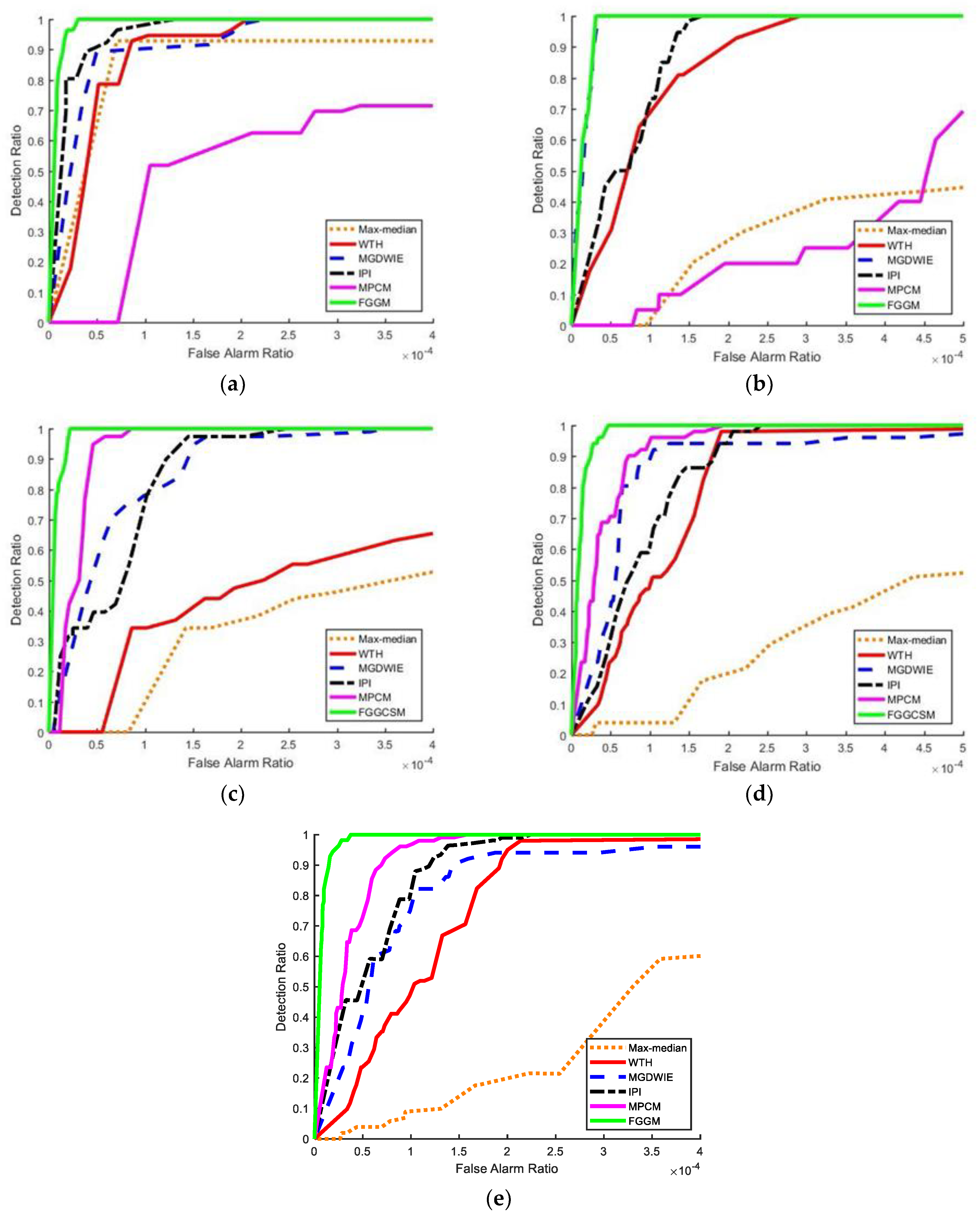
3.2. Detection Result and Disscussion
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Dong, L.; Wang, B.; Zhao, M.; Xu, W. Robust Infrared Maritime Target Detection Based on Visual Attention and Spatiotemporal Filtering. IEEE Trans. Geosci. Remote Sens. 2017, 55, 3037–3050. [Google Scholar] [CrossRef]
- Prasad, D.K.; Rajan, D.; Rachmawati, L.; Rajabally, E. Video Processing from Electro-Optical Sensors for Object Detection and Tracking in a Maritime Environment: A Survey. IEEE Trans. Intell. Transp. Syst. 2017, 18, 1993–2016. [Google Scholar] [CrossRef]
- Wu, J.; Mao, S.; Wang, X.; Zhang, T. Ship target detection and tracking in cluttered infrared imagery. Opt. Eng. 2011, 50, 057207. [Google Scholar] [CrossRef]
- Xu, X.W.; Zhang, X.L.; Zhang, T.W. Lite-YOLOv5: A Lightweight Deep Learning Detector for On-Board Ship Detection in Large-Scene Sentinel-1 SAR Images. Remote Sens. 2022, 14, 1018. [Google Scholar] [CrossRef]
- Xu, X.W.; Zhang, X.L.; Shao, Z.K.; Shi, J.; Wei, S.J.; Zhang, T.W.; Zeng, T.J. A Group-Wise Feature Enhancement-and-Fusion Network with Dual-Polarization Feature Enrichment for SAR Ship Detection. Remote Sens. 2022, 14, 5276. [Google Scholar] [CrossRef]
- Zhao, B.; Xiao, S.; Lu, H. Spatial-temporal local contrast for moving point target detection in space-based infrared imaging system. Infrared Phys. Technol. 2018, 95, 53–60. [Google Scholar] [CrossRef]
- Deshpande, S.D.; Er, M.H.; Venkateswarlu, R.; Chan, P. Max-mean and max-median filters for detection of small targets. In Proceedings of the SPIE Signal and Data Processing of Small Targets, Denver, CO, USA, 20–22 July 1999; pp. 74–84. [Google Scholar]
- Zhang, F.; Li, C.; Shi, L. Detecting and tracking dim moving point target in IR image sequence. Infrared Phys. Technol. 2005, 46, 323–328. [Google Scholar] [CrossRef]
- Bai, X.; Zhou, F. Infrared small target enhancement and detection based on modified top-hat transformations. Comput. Electr. Eng. 2010, 36, 1193–1201. [Google Scholar] [CrossRef]
- Cao, Y.; Liu, R.M.; Yang, J. Small Target Detection Using Two-Dimensional Least Mean Square (TDLMS) Filter Based on Neighborhood Analysis. Int. J. Infrared Millim. Waves 2008, 29, 188–200. [Google Scholar] [CrossRef]
- Gao, C.; Meng, D.; Yang, Y. Infrared Patch-Image Model for Small Target Detection in a Single Image. IEEE Trans. Image Process. 2013, 22, 4996–5009. [Google Scholar] [CrossRef] [PubMed]
- Dai, Y.; Wu, Y. Reweighted infrared patch-tensor model with both nonlocal and local priors for single-frame small target detection. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 3752–3767. [Google Scholar] [CrossRef]
- Gao, Z.; Dai, J.; Xie, C. Dim and small target detection based on feature mapping neural networks. J. Vis. Commun. Image Represent. 2019, 62, 206–216. [Google Scholar] [CrossRef]
- Wang, N.; Li, B.; Wei, X.; Wang, Y.; Yan, H. Ship detection in spaceborne infrared image based on lightweight CNN and multisource feature cascade decision. IEEE Trans. Geosci. Remote Sens. 2021, 59, 4324–4339. [Google Scholar] [CrossRef]
- Ma, J.; Tang, L.; Xu, M.; Zhang, H.; Xiao, G. STDFusionNet: An infrared and visible image fusion network based on salient target detection. IEEE Trans. Instrum. Measure. 2021, 70, 1–13. [Google Scholar] [CrossRef]
- Du, J.; Lu, H.; Hu, M.; Zhang, L.; Shen, X. CNN-based infrared dim small target detection algorithm using target-oriented shallow-deep features and effective small anchor. IET Image Process 2021, 15, 1–15. [Google Scholar] [CrossRef]
- Deng, H.; Sun, X.; Liu, M. Infrared small-target detection using multiscale gray difference weighted image entropy. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 60–72. [Google Scholar] [CrossRef]
- Chen, C.; Li, H.; Wei, Y. A Local Contrast Method for Small Infrared Target Detection. IEEE Trans. Geosci. Remote Sens. 2013, 52, 574–581. [Google Scholar] [CrossRef]
- Wei, Y.; You, X.; Li, H. Multiscale patch-based contrast measure for small infrared target detection. Pattern Recognit. 2016, 58, 216–226. [Google Scholar] [CrossRef]
- Kim, S.; Lee, J. Scale invariant small target detection by optimizing signal-to-clutter ratio in heterogeneous background for infrared search and track. Pattern Recognit. 2012, 45, 393–406. [Google Scholar] [CrossRef]
- Liu, D.; Cao, L.; Li, Z. Infrared small target detection based on flux density and direction diversity in gradient vector field. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 2528–2554. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sequence Number | Image Resolution | Target Number | Target Area | Minimum SCR | Maximum SCR |
|---|---|---|---|---|---|
| 1 | 127 × 127 | 1 | 9∼20 | 0.7029 | 1.9217 |
| 2 | 127 × 127 | 1 | 9∼16 | 1.2290 | 3.0872 |
| 3 | 256 × 256 | 1 | 12∼30 | 1.9884 | 3.4885 |
| 4 | 246 × 246 | 1 | 16∼30 | 1.9178 | 4.3801 |
| 5 | 768 × 1024 | 1 | 18∼32 | 1.0123 | 1.4575 |
| Method | Sequence 1 | Sequence 2 | Sequence 3 | Sequence 4 | Sequence 5 |
|---|---|---|---|---|---|
| Max-median | 1.5156 | 1.0009 | 1.1232 | 1.1365 | 4.1365 |
| WTH | 3.1943 | 25.2921 | 2.5197 | 2.7383 | 3.2121 |
| MGDWIE | 6.4378 | 17.9681 | 1.8751 | 2.9315 | 5.7624 |
| IPI | 7.7759 | 22.0548 | 10.4719 | 16.0526 * | 17.1025 |
| MPCM | 15.1403 | 145.5907 | 28.5717 | 15.5543 | 18.5409 |
| FGGCSM | 24.6023 * | 224.5436 * | 34.8075 * | 15.6391 | 20.1227 * |
| Method | Sequence 1 | Sequence 2 | Sequence 3 | Sequence 4 | Sequence 5 |
|---|---|---|---|---|---|
| Max-median | 3.1129 | 4.7336 | 5.0272 | 2.5215 | 12.6923 |
| WTH | 2.2078 | 2.4948 | 2.8281 | 2.3481 | 6.9023 |
| MGDWIE | 6.0361 | 7.8905 | 8.0536 | 8.3177 | 16.7334 |
| IPI | 6.4481 | 9.4701 | 16.9272 | 12.6419 | 20.1245 |
| MPCM | 3.6502 | 4.7313 | 20.3715 | 11.6218 | 23.7876 |
| FGGCSM | 14.2953 * | 17.2398 * | 42.6285 * | 23.9201 * | 26.5823 * |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, W.; Li, Z.; Siddique, A. Infrared Maritime Small-Target Detection Based on Fusion Gray Gradient Clutter Suppression. Remote Sens. 2024, 16, 1255. https://doi.org/10.3390/rs16071255
Wang W, Li Z, Siddique A. Infrared Maritime Small-Target Detection Based on Fusion Gray Gradient Clutter Suppression. Remote Sensing. 2024; 16(7):1255. https://doi.org/10.3390/rs16071255
Chicago/Turabian StyleWang, Wei, Zhengzhou Li, and Abubakar Siddique. 2024. "Infrared Maritime Small-Target Detection Based on Fusion Gray Gradient Clutter Suppression" Remote Sensing 16, no. 7: 1255. https://doi.org/10.3390/rs16071255
APA StyleWang, W., Li, Z., & Siddique, A. (2024). Infrared Maritime Small-Target Detection Based on Fusion Gray Gradient Clutter Suppression. Remote Sensing, 16(7), 1255. https://doi.org/10.3390/rs16071255