
SWOT Level 2 Lake Single-Pass Product: The L2_HR_LakeSP Data Preliminary Analysis for Water Level Monitoring



Abstract
1. Introduction
2. Data
2.1. SWOT
2.1.1. “L2_HR_LakeSP” Product
2.1.2. Available Attributes
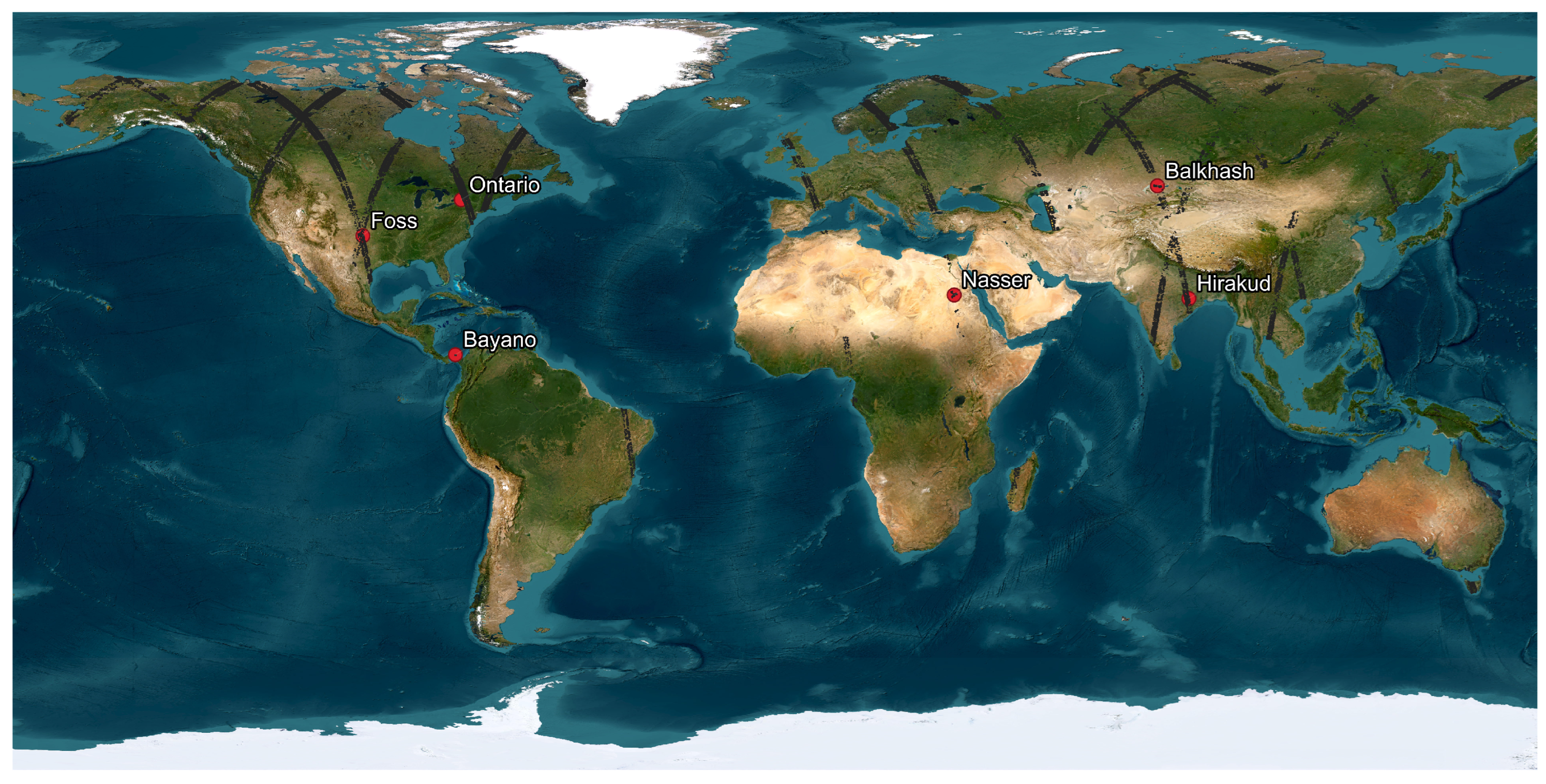
2.2. Study Area, In Situ and Validation Data
3. Method
3.1. Pre-Processing
3.2. Spatial Outlier Removal and Data Aggregation
3.3. Datum Transformation
4. Results
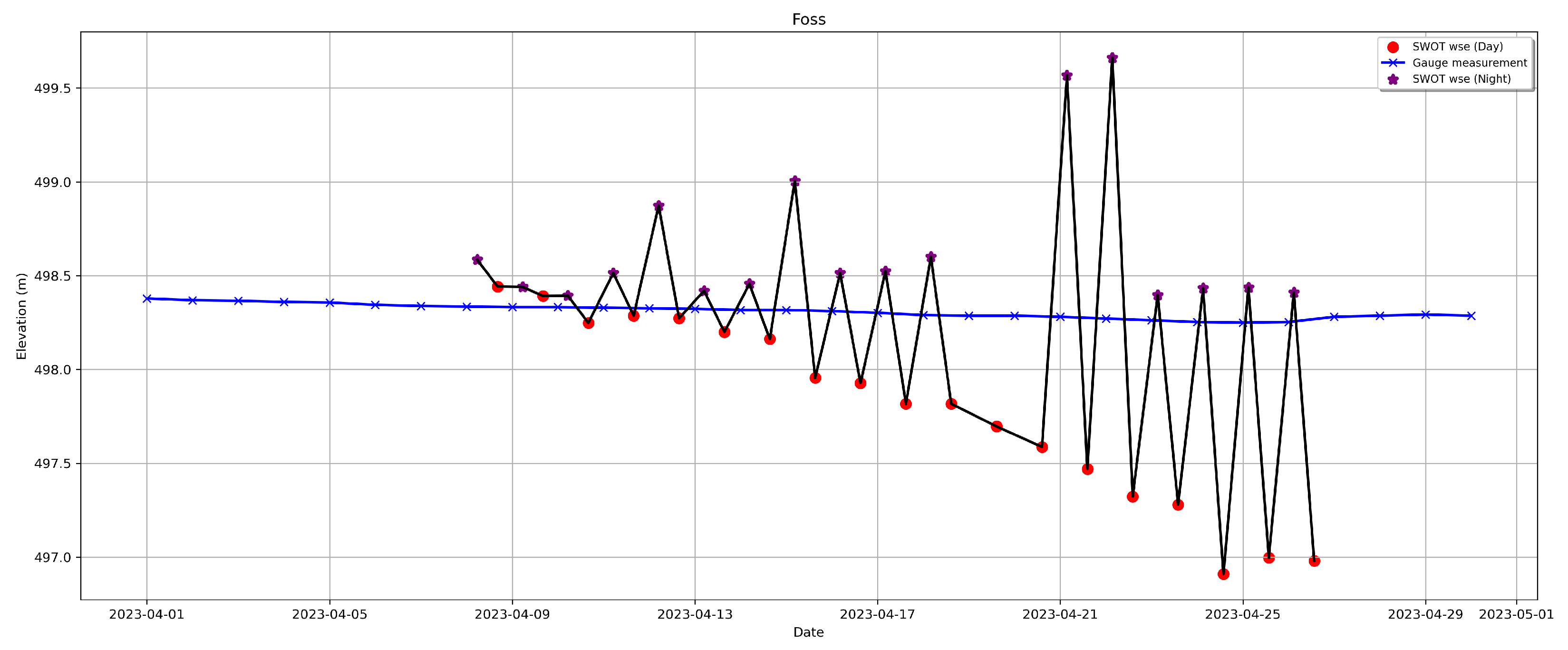
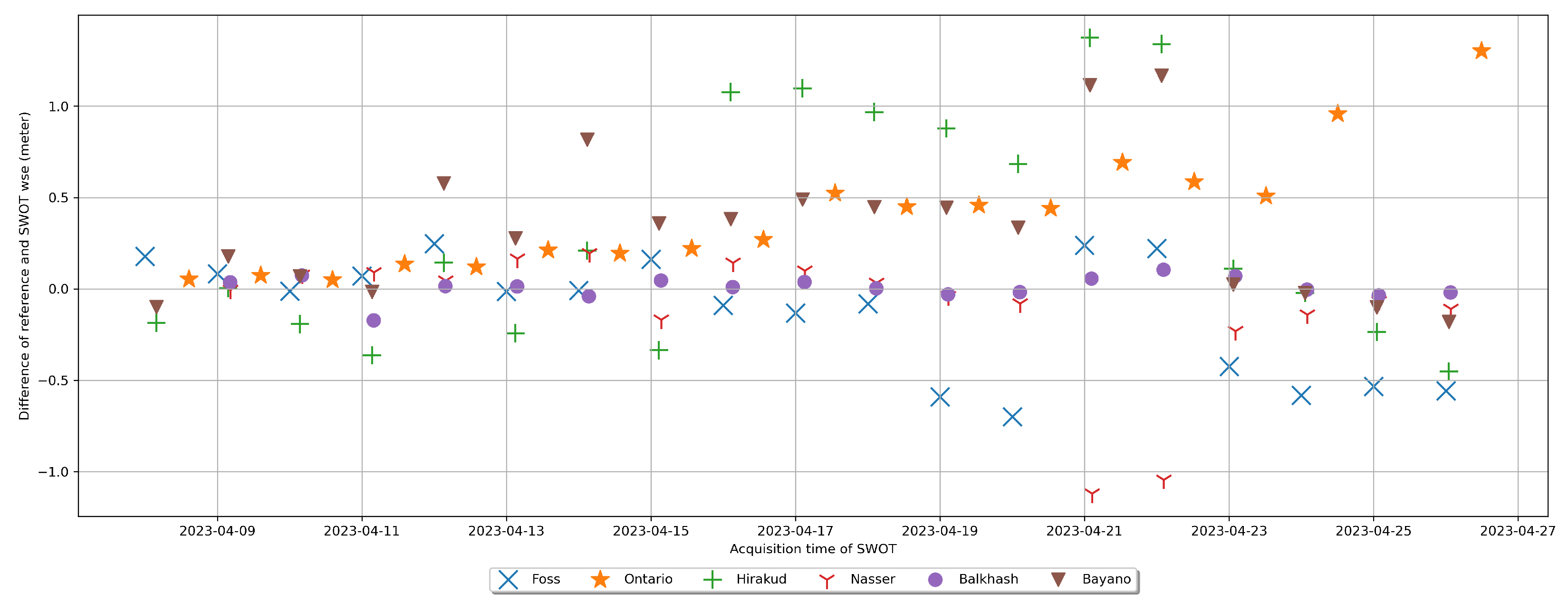
4.1. Accuracy Dependency on Time
4.2. Changes in Accuracy
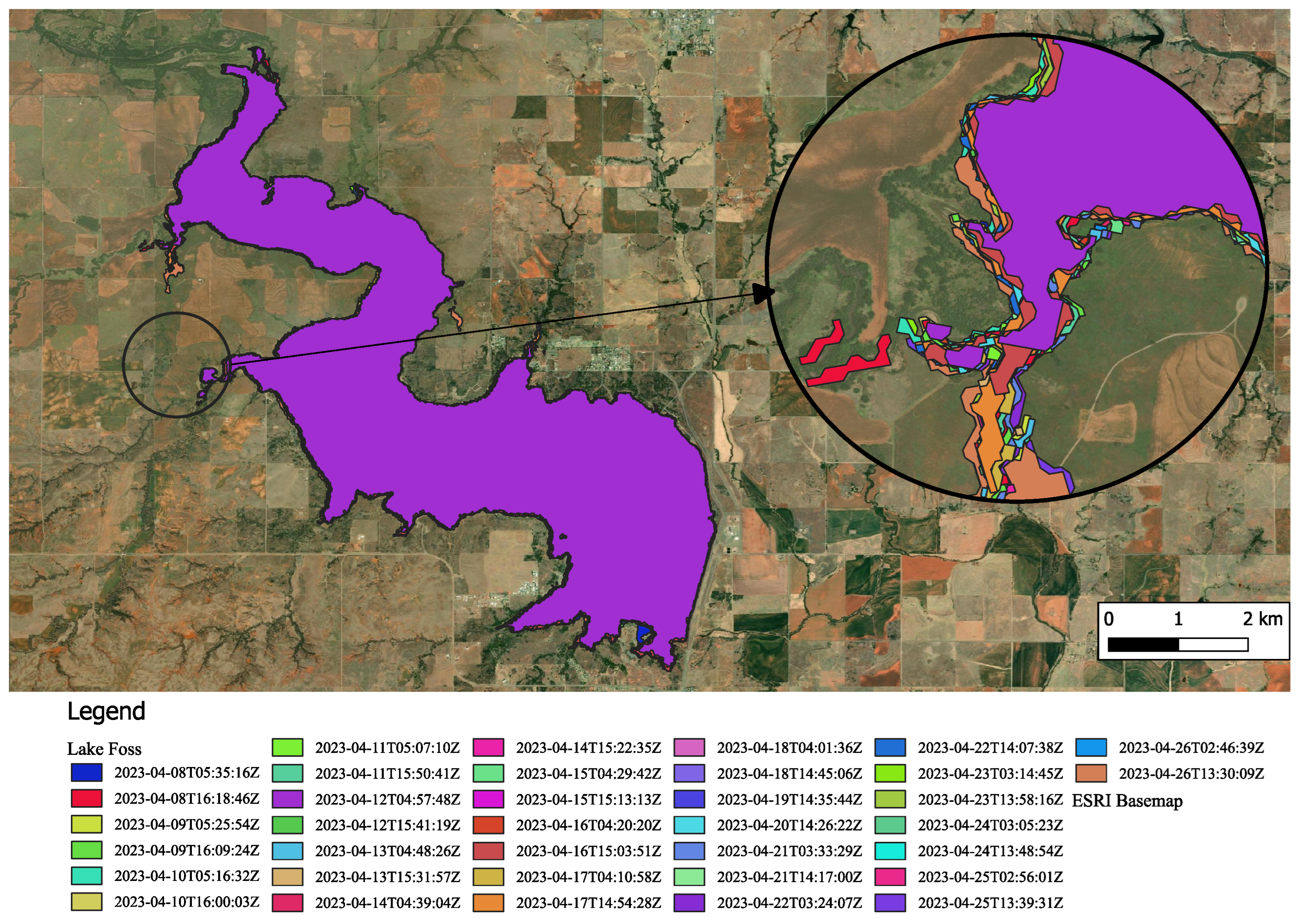
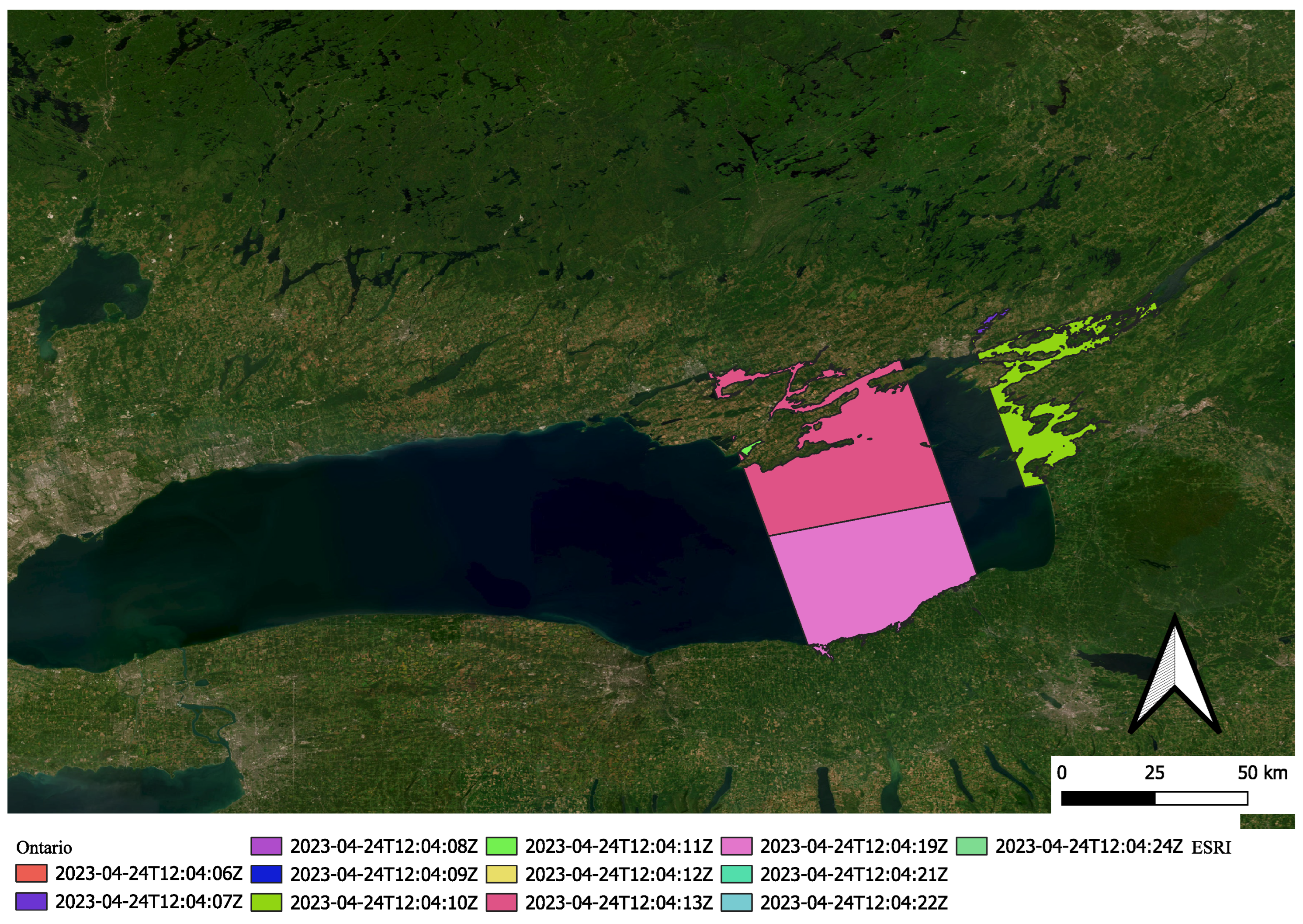
4.3. Lake Polygons Distortions
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Sekertekin, A. A survey on global thresholding methods for mapping open water body using Sentinel-2 satellite imagery and normalized difference water index. Arch. Comput. Methods Eng. 2021, 28, 1335–1347. [Google Scholar] [CrossRef]
- Hamoudzadeh, A.; Ravanelli, R.; Crespi, M. GEDI data within Google Earth Engine: Potentials and analysis for inland surface water monitoring. In Proceedings of the EGU General Assembly 2023, Vienna, Austria, 23–28 April 2023. Technical Report. Copernicus Meetings. [Google Scholar] [CrossRef]
- Crétaux, J.F.; Abarca-del Río, R.; Berge-Nguyen, M.; Arsen, A.; Drolon, V.; Clos, G.; Maisongrande, P. Lake volume monitoring from space. Surv. Geophys. 2016, 37, 269–305. [Google Scholar] [CrossRef]
- Chang, N.B.; Imen, S.; Vannah, B. Remote sensing for monitoring surface water quality status and ecosystem state in relation to the nutrient cycle: A 40-year perspective. Crit. Rev. Environ. Sci. Technol. 2015, 45, 101–166. [Google Scholar] [CrossRef]
- Xu, N.; Zheng, H.; Ma, Y.; Yang, J.; Liu, X.; Wang, X. Global estimation and assessment of monthly lake/reservoir water level changes using ICESat-2 ATL13 products. Remote Sens. 2021, 13, 2744. [Google Scholar] [CrossRef]
- Fayad, I.; Baghdadi, N.; Bailly, J.S.; Frappart, F.; Zribi, M. Analysis of GEDI elevation data accuracy for inland waterbodies altimetry. Remote Sens. 2020, 12, 2714. [Google Scholar] [CrossRef]
- Hamoudzadeh, A.; Ravanelli, R.; Crespi, M. GEDI data withinGoogle Earth Engine: Preliminary analysis of a resource for inland surface water monitoring. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2023; XLVIII-M-1-2023, 131–136. [Google Scholar] [CrossRef]
- Donlon, C.J.; Cullen, R.; Giulicchi, L.; Vuilleumier, P.; Francis, C.R.; Kuschnerus, M.; Simpson, W.; Bouridah, A.; Caleno, M.; Bertoni, R.; et al. The Copernicus Sentinel-6 mission: Enhanced continuity of satellite sea level measurements from space. Remote Sens. Environ. 2021, 258, 112395. [Google Scholar] [CrossRef]
- Taburet, N.; Zawadzki, L.; Vayre, M.; Blumstein, D.; Le Gac, S.; Boy, F.; Raynal, M.; Labroue, S.; Crétaux, J.F.; Femenias, P. S3MPC: Improvement on inland water tracking and water level monitoring from the OLTC onboard Sentinel-3 altimeters. Remote Sens. 2020, 12, 3055. [Google Scholar] [CrossRef]
- Jiang, X.; Jia, Y.; Zhang, Y. Measurement analyses and evaluations of sea-level heights using the HY-2A satellite’s radar altimeter. Acta Oceanol. Sin. 2019, 38, 134–139. [Google Scholar] [CrossRef]
- Biancamaria, S.; Schaedele, T.; Blumstein, D.; Frappart, F.; Boy, F.; Desjonquères, J.D.; Pottier, C.; Blarel, F.; Niño, F. Validation of Jason-3 tracking modes over French rivers. Remote Sens. Environ. 2018, 209, 77–89. [Google Scholar] [CrossRef]
- Schwatke, C.; Dettmering, D.; Börgens, E.; Bosch, W. Potential of SARAL/AltiKa for inland water applications. Mar. Geod. 2015, 38, 626–643. [Google Scholar] [CrossRef]
- Schwatke, C.; Dettmering, D.; Bosch, W.; Seitz, F. DAHITI—An innovative approach for estimating water level time series over inland waters using multi-mission satellite altimetry. Hydrol. Earth Syst. Sci. 2015, 19, 4345–4364. [Google Scholar] [CrossRef]
- Laboratoire d’Etudes en Geophysique et Oceanographie, Equipe Geodesie, Oceanograhie et Hydrologie Spatiale). Hydroweb: Time Series of Water Levels in the Rivers and Lakes around the World. Available online: https://hydroweb.theia-land.fr (accessed on 31 January 2024).
- Riggs, R.M.; Allen, G.H.; Brinkerhoff, C.B.; Sikder, M.S.; Wang, J. Turning lakes into river gauges using the LakeFlow algorithm. Geophys. Res. Lett. 2023, 50, e2023GL103924. [Google Scholar] [CrossRef]
- Liu, K.; Song, C.; Zhao, S.; Wang, J.; Chen, T.; Zhan, P.; Fan, C.; Zhu, J. Mapping inundated bathymetry for estimating lake water storage changes from SRTM DEM: A global investigation. Remote Sens. Environ. 2024, 301, 113960. [Google Scholar] [CrossRef]
- Ma, C.; Guo, X.; Zhang, H.; Di, J.; Chen, G. An investigation of the influences of SWOT sampling and errors on ocean eddy observation. Remote Sens. 2020, 12, 2682. [Google Scholar] [CrossRef]
- SWOT JPL NASA Mission Team. SWOT Data: First Public Release. 2023. Available online: https://swot.jpl.nasa.gov/news/113/swot-data-first-public-release/ (accessed on 31 January 2024).
- Lee, H.; Durand, M.; Jung, H.C.; Alsdorf, D.; Shum, C.; Sheng, Y. Characterization of surface water storage changes in Arctic lakes using simulated SWOT measurements. Int. J. Remote Sens. 2010, 31, 3931–3953. [Google Scholar] [CrossRef]
- Desrochers, N.M.; Peters, D.L.; Siles, G.; Cauvier Charest, E.; Trudel, M.; Leconte, R. A Remote Sensing View of the 2020 Extreme Lake-Expansion Flood Event into the Peace–Athabasca Delta Floodplain—Implications for the Future SWOT Mission. Remote Sens. 2023, 15, 1278. [Google Scholar] [CrossRef]
- Grippa, M.; Rouzies, C.; Biancamaria, S.; Blumstein, D.; Cretaux, J.F.; Gal, L.; Robert, E.; Gosset, M.; Kergoat, L. Potential of SWOT for monitoring water volumes in Sahelian ponds and lakes. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 2541–2549. [Google Scholar] [CrossRef]
- Rodriguez, E.; Fernandez, D.E.; Peral, E.; Chen, C.W.; De Bleser, J.W.; Williams, B. Wide-swath altimetry: A review. In Satellite Altimetry over Oceans and Land Surfaces; CRC Press: Boca Raton, FL, USA, 2017; pp. 71–112. [Google Scholar]
- CNES–JPL/NASA. Surface Water and Ocean Topography (SWOT) Project SWOT Product Description Long Name: Level 2 KaRIn High Rate Lake Single Pass Vector Product Short Name: L2_HR_LakeSP. 2023. Available online: https://podaac.jpl.nasa.gov/SWOT (accessed on 31 January 2024).
- SWOT. Archiving, Validation and Interpretation of Satellite Oceanographic Data (AVISO). 2024. Available online: www.aviso.altimetry.fr/en/missions/current-missions/swot.html (accessed on 31 January 2024).
- Fjørtoft, R.; Gaudin, J.M.; Pourthié, N.; Lalaurie, J.C.; Mallet, A.; Nouvel, J.F.; Martinot-Lagarde, J.; Oriot, H.; Borderies, P.; Ruiz, C.; et al. KaRIn on SWOT: Characteristics of near-nadir Ka-band interferometric SAR imagery. IEEE Trans. Geosci. Remote Sens. 2013, 52, 2172–2185. [Google Scholar] [CrossRef]
- Rodriguez, E.; Esteban-Fernandez, D. The Surface Water and Ocean Topography Mission (SWOT): The Ka-band Radar Interferometer (KaRIn) for water level measurements at all scales. In Proceedings of the Sensors, Systems, and Next-Generation Satellites XIV, Toulouse, France, 20–23 September 2010; Volume 7826, pp. 292–299. [Google Scholar]
- Pavlis, N.K.; Holmes, S.A.; Kenyon, S.C.; Factor, J.K. The development and evaluation of the Earth Gravitational Model 2008 (EGM2008). J. Geophys. Res. Solid Earth 2012, 117. [Google Scholar] [CrossRef]
- Wang, J.; Pottier, C.; Cazals, C.; Battude, M.; Sheng, Y.; Song, C.; Sikder, M.S.; Yang, X.; Ke, L.; Gosset, M.; et al. The Surface Water and Ocean Topography Mission (SWOT) Prior Lake Database (PLD): Lake mask and operational auxiliaries. ESS Open Arch. 2023, preprint. [Google Scholar]
- Williams, B.A.; Fjørtoft, R. Product Description Document—Level 2 KaRIn High Rate Water Mask Pixel Cloud Product (L2_HR_PIXC). JPL D-56411. 2023. [Google Scholar]
- Williams, B.; Fjørtoft, R. Pixel Cloud Product. 2017. Available online: https://swot.jpl.nasa.gov/system/documents/files/3761_3761_jun17_stm_37_williams.pdf (accessed on 31 January 2024).
- Pottier, C.; Stuurman, C. Algorithm Theoretical Basis Document Long Name: Level 2 KaRIn High Rate Lake Single Pass Science Algorithm Software: Level 2 Processing, Short Name: SAS_L2_HR_LakeSP: Level 2Processing. 2023. Available online: https://cmr.earthdata.nasa.gov/search/concepts/C2758162595-POCLOUD.html (accessed on 31 January 2024).
- Yaremchuk, M.; Beattie, C.; Panteleev, G.; D’Addezio, J.M.; Smith, S. The Effect of Spatially Correlated Errors on Sea Surface Height Retrieval from SWOT Altimetry. Remote Sens. 2023, 15, 4277. [Google Scholar] [CrossRef]
- Committee, P.P.S. PostGIS, Spatial and Geographic Objects for PostgreSQL. 2018. Available online: https://access.crunchydata.com/documentation/postgis/3.1.5/ (accessed on 31 January 2024).
- Rapp, R.H. Separation between reference surfaces of selected vertical datums. Bull. Géod. 1994, 69, 26–31. [Google Scholar] [CrossRef]
- National Oceanic and Atmospheric Administration. Online Vertical Datum Transformation. 2023. Available online: https://vdatum.noaa.gov/vdatumweb/ (accessed on 31 January 2024).
- Tapley, B.; Ries, J.; Bettadpur, S.; Chambers, D.; Cheng, M.; Condi, F.; Gunter, B.; Kang, Z.; Nagel, P.; Pastor, R.; et al. GGM02–An improved Earth gravity field model from GRACE. J. Geod. 2005, 79, 467–478. [Google Scholar] [CrossRef]
- Förste, C.; Bruinsma, S.; Abrikosov, O.; Lemoine, J.; Schaller, T.; Götze, H.; Ebbing, J.; Marty, J.; Flechtner, F.; Balmino, G.; et al. EIGEN-6C4. The Latest Combined Global Gravity Field Model Including GOCE Data up to Degree and Order 2190 of GFZ Potsdam and GRGS Toulouse. 2014, Volume 2190. Available online: https://dataservices.gfz-potsdam.de/icgem/showshort.php?id=escidoc:1119897 (accessed on 31 January 2024).
- Barthelmes, F. Definition of Functionals of the Geopotential and Their Calculation from Spherical Harmonic Models: Theory and Formulas Used by the Calculation Service of the International Centre for Global Earth Models (ICGEM). 2009. Available online: http://icgem.gfz-potsdam.de (accessed on 31 January 2024).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Center | Area (km2) | Reference |
|---|---|---|---|
| Ontario (North America) | 43°51′N 77°57′W | ≈19,000 | Gauge measurements |
| Foss (North America) | 35°33′N 99°13′W | ≈35 | Gauge measurements |
| Nasser (Egypt) | 22°30′N 31°52′E | ≈5250 | Hydrospace |
| Balkash (Kazakhstan) | 46°32′N 74° 52′E | ≈17,000 | Hydrospace |
| Hirakud dam (India) | 21°32′N 83°52′E | ≈740 | DAHITI |
| Bayano (Panama) | 9°09′N 78°46′W | ≈350 | DAHITI |
| time_str | cycleID_passID * | wse | wse_u | wse_r_u | wse_std | area_total |
|---|---|---|---|---|---|---|
| (UTC) | (m) | (m) | (m) | (m) | (km2) | |
| 24 April 2023 12:04:06 | 500_022 | 76.917 | 0.380 | 0.050 | 0.224 | 0.042573 |
| 24 April 2023 12:04:06 | 500_022 | 76.738 | 0.045 | 0.044 | 0.213 | 0.074521 |
| 24 April 2023 12:04:07 | 500_022 | 87.635 | 0.003 | 0.002 | 0.153 | 16.72101 |
| 24 April 2023 12:04:07 | 500_022 | 57.688 | 0.046 | 0.045 | 0.230 | 0.117021 |
| 24 April 2023 12:04:07 | 500_022 | 76.948 | 0.025 | 0.022 | 0.162 | 0.190093 |
| 24 April 2023 12:04:07 | 500_022 | 89.247 | 0.077 | 0.083 | 0.281 | 0.033036 |
| 24 April 2023 12:04:07 | 500_022 | 72.528 | 0.053 | 0.052 | 0.275 | 0.077082 |
| 24 April 2023 12:04:07 | 500_022 | 73.159 | 0.034 | 0.027 | 0.228 | 0.096808 |
| 24 April 2023 12:04:08 | 500_022 | 90.784 | 0.019 | 0.011 | 0.135 | 0.330947 |
| 24 April 2023 12:04:08 | 500_022 | 73.975 | 0.049 | 0.041 | 0.180 | 0.066079 |
| 24 April 2023 12:04:08 | 500_022 | 92.117 | 0.045 | 0.045 | 0.107 | 0.049441 |
| 24 April 2023 12:04:09 | 500_022 | 55.703 | 0.061 | 0.040 | 0.289 | 0.089956 |
| † 24 April 2023 12:04:10 | 500_022 | 73.826 | 0.001 | 0.000 | 0.495 | 723.1566 |
| 24 April 2023 12:04:11 | 500_022 | 77.038 | 0.004 | 0.003 | 0.264 | 11.26923 |
| 24 April 2023 12:04:12 | 500_022 | 83.056 | 0.051 | 0.029 | 0.099 | 0.067581 |
| 24 April 2023 12:04:12 | 500_022 | 79.763 | 0.059 | 0.061 | 0.222 | 0.049831 |
| † 24 April 2023 12:04:13 | 500_022 | 75.952 | 0.001 | 0.000 | 0.605 | 1985.917 |
| † 24 April 2023 12:04:19 | 500_022 | 76.088 | 0.001 | 0.000 | 0.535 | 1883.691 |
| 24 April 2023 12:04:21 | 500_022 | 85.217 | 0.258 | 0.039 | 0.480 | 0.036153 |
| 24 April 2023 12:04:22 | 500_022 | 93.767 | 0.238 | 0.024 | 0.276 | 0.488478 |
| 24 April 2023 12:04:24 | 500_022 | 76.930 | 0.095 | 0.083 | 0.299 | 0.029528 |
| ‡ Weighted mean | 75.67 | |||||
| ‡ Mean | 75.29 | |||||
| ‡ Median | 75.95 |
| Lake | MD | Median | SD | NMAD | RMSE | MAE | Correlation | Orbits | Total Features | Weights |
|---|---|---|---|---|---|---|---|---|---|---|
| (m) | (m) | (m) | (m) | (m) | (m) | (-) | (-) | (-) | (-) | |
| Ontario | 0.40 | 0.36 | 0.33 | 0.29 | 0.52 | 0.40 | 0.89 | 18 | 365 | 18 |
| Foss | −0.13 | −0.01 | 0.32 | 0.28 | 0.34 | 0.26 | 0.71 | 36 | 36 | 18 |
| Balkhash | 0.01 | 0.01 | 0.06 | 0.05 | 0.06 | 0.04 | 0.44 | 18 | 1735 | 10 |
| Hirakud | −0.12 | −0.02 | 0.37 | 0.17 | 0.38 | 0.21 | 0.71 | 18 | 233 | 2 |
| Nasser | −0.27 | −0.23 | 0.15 | 0.09 | 0.31 | 0.27 | 0.35 | 18 | 115 | 7 |
| Bayano | 0.33 | 0.34 | 0.39 | 0.40 | 0.50 | 0.37 | 0.78 | 19 | 122 | 2 |
| Average | 0.04 | 0.08 | 0.27 | 0.21 | 0.35 | 0.26 | 0.65 | - | 434 | - |
| wAverage | 0.06 | 0.10 | 0.26 | 0.22 | 0.35 | 0.27 | 0.68 | - | - | - |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hamoudzadeh, A.; Ravanelli, R.; Crespi, M. SWOT Level 2 Lake Single-Pass Product: The L2_HR_LakeSP Data Preliminary Analysis for Water Level Monitoring. Remote Sens. 2024, 16, 1244. https://doi.org/10.3390/rs16071244
Hamoudzadeh A, Ravanelli R, Crespi M. SWOT Level 2 Lake Single-Pass Product: The L2_HR_LakeSP Data Preliminary Analysis for Water Level Monitoring. Remote Sensing. 2024; 16(7):1244. https://doi.org/10.3390/rs16071244
Chicago/Turabian StyleHamoudzadeh, Alireza, Roberta Ravanelli, and Mattia Crespi. 2024. "SWOT Level 2 Lake Single-Pass Product: The L2_HR_LakeSP Data Preliminary Analysis for Water Level Monitoring" Remote Sensing 16, no. 7: 1244. https://doi.org/10.3390/rs16071244
APA StyleHamoudzadeh, A., Ravanelli, R., & Crespi, M. (2024). SWOT Level 2 Lake Single-Pass Product: The L2_HR_LakeSP Data Preliminary Analysis for Water Level Monitoring. Remote Sensing, 16(7), 1244. https://doi.org/10.3390/rs16071244