
Ocean Temperature Profiling Lidar: Analysis of Technology and Potential for Rapid Ocean Observations

 , and
, and
Abstract
1. Introduction
2. Materials and Methods
2.1. ECCO Model Solutions
2.2. Ocean Mixed Layer Depths
2.3. Brillouin Lidar Signal to Noise Ratio (SNR) Calculations
2.4. Lidar Return Probability, and Standard Error Calculations
2.5. Global Ocean Diffuse Attenuation Coefficients at 490 nm
2.6. OSSE Satellite Simulations
2.7. Brillouin Lidar Mixed Layer Depth Measurement Probabilities
2.8. Ocean Heat Content (OHC) and Heat Storage Rates (HSR) Calculations
3. Results
3.1. Probability of Profiling to Mixed Layer Depth Measurements
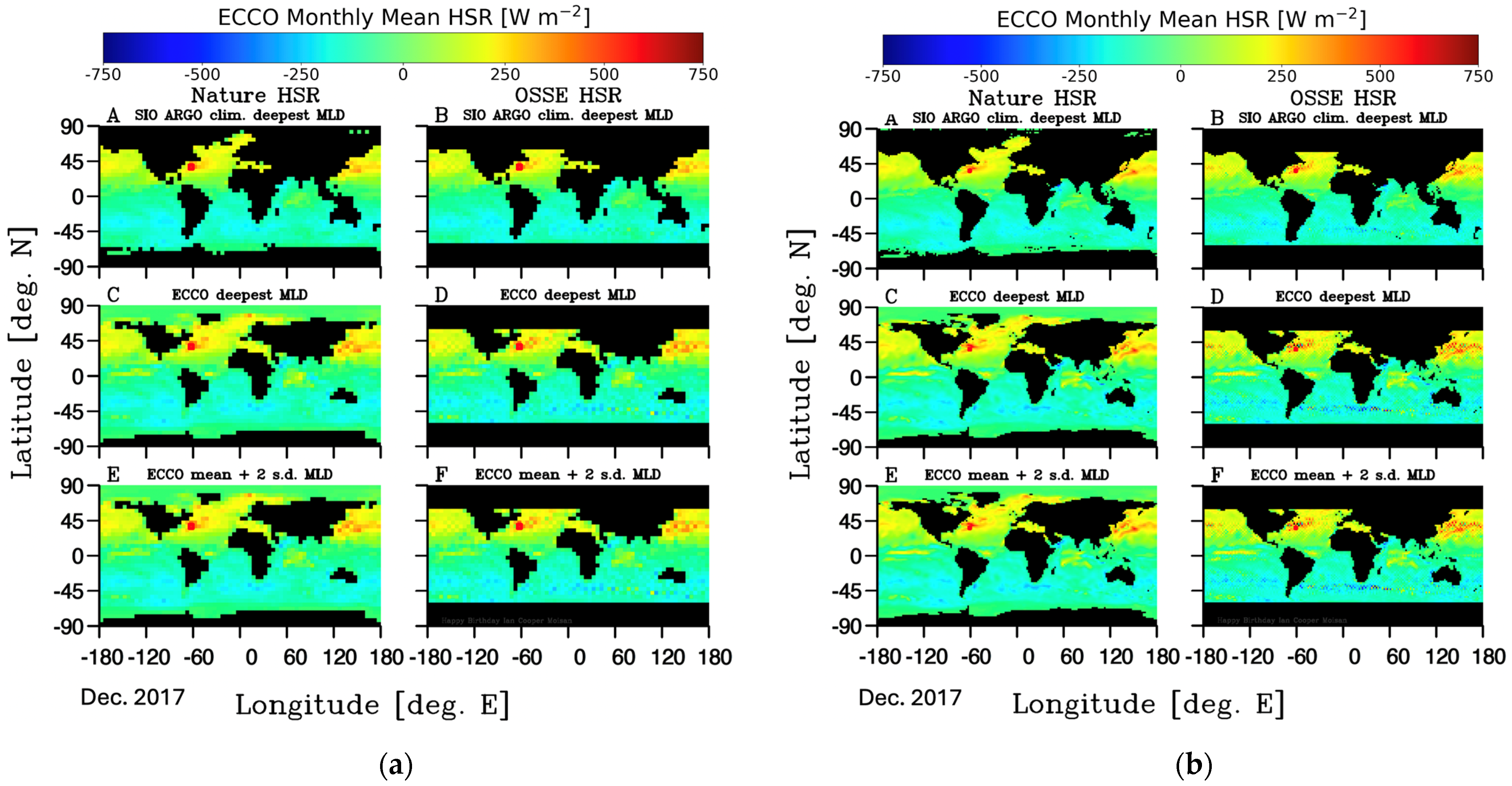
3.2. ‘Nature’ and OSSE Solutions: ECCOv4r4 Heat Storage Rates (HSRs)
3.2.1. HSR from Integration to the ECCO Ocean Bottom
3.2.2. HSRs from Integration to the SIO Argo Deepest MLD
3.2.3. HSR from Integration to the ECCO Deepest MLD
3.2.4. HSR from Integration to the ECCO Deepest Mean + 2 std. dev. MLD Climatology
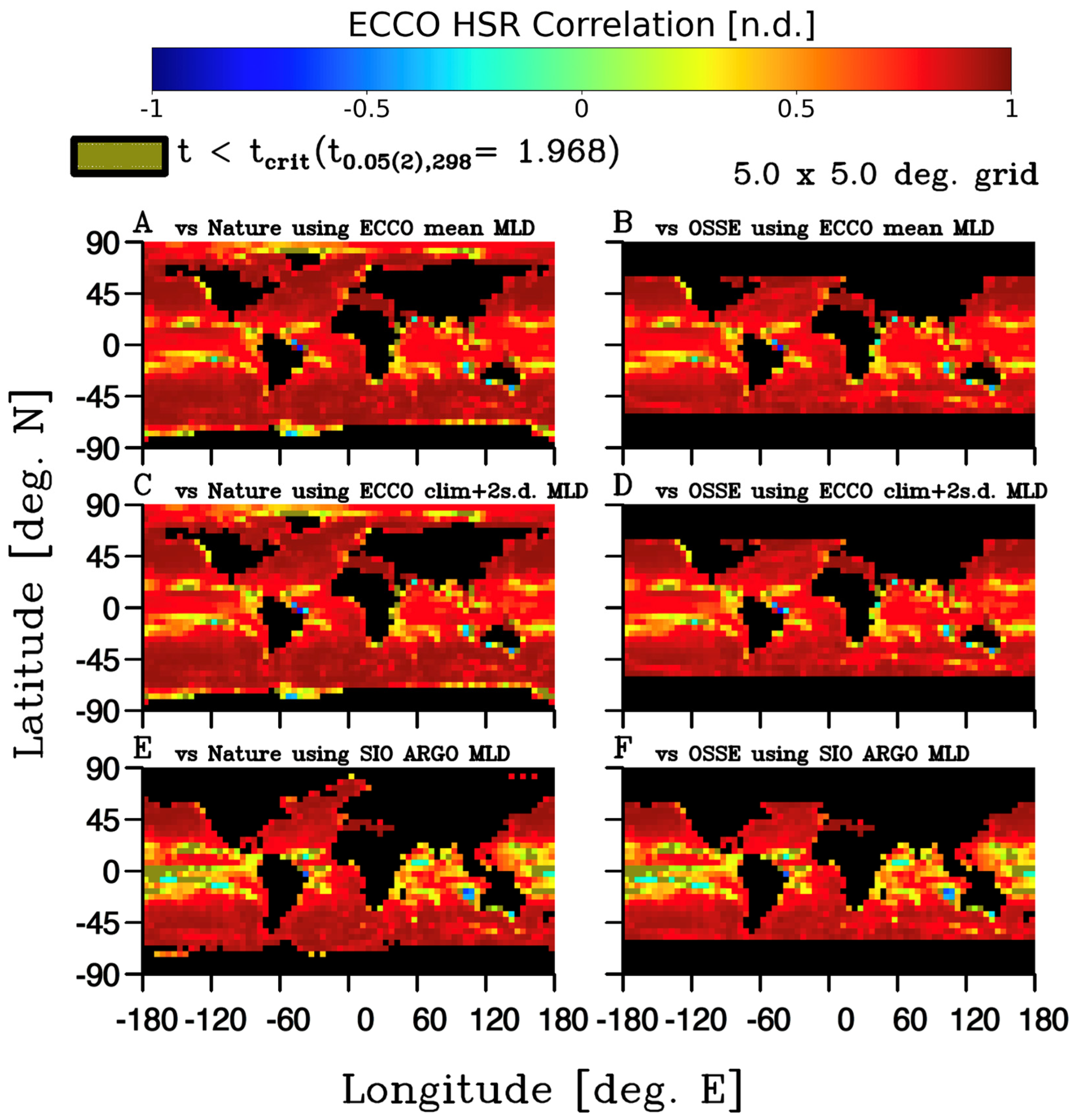
3.2.5. HSR Time Series Comparisons and Global Correlations
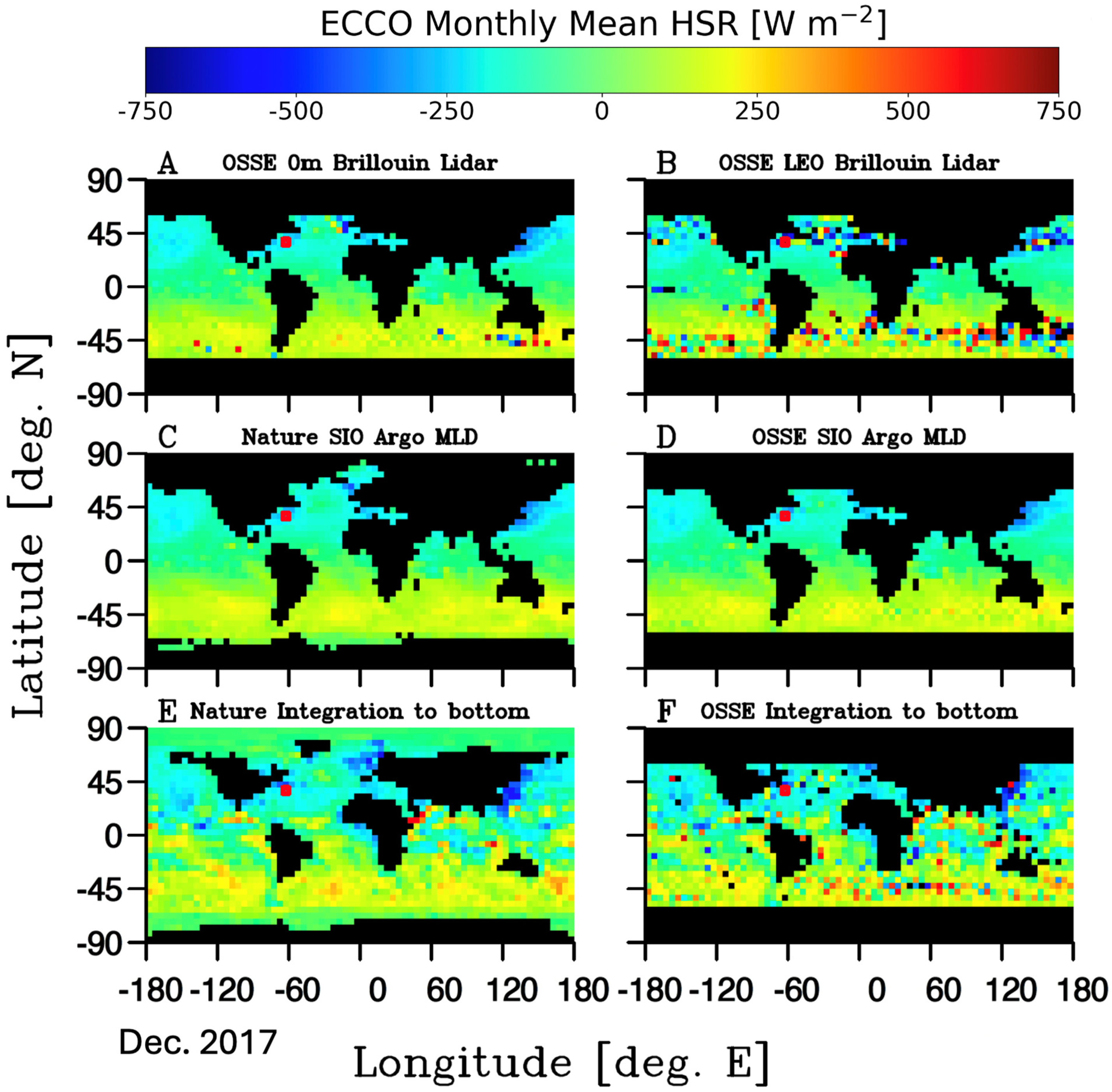
3.3. OSSE: Brillouin Lidar Heat Storage Rate (HSR)
3.3.1. Brillouin Lidar OSSE Flown at 0 m (Ocean Surface) with HSR Integration to SIO Argo Deepest MLD
3.3.2. OHC Brillouin Lidar Flown at LEO with HSRs from Integration to SIO Argo Deepest MLD
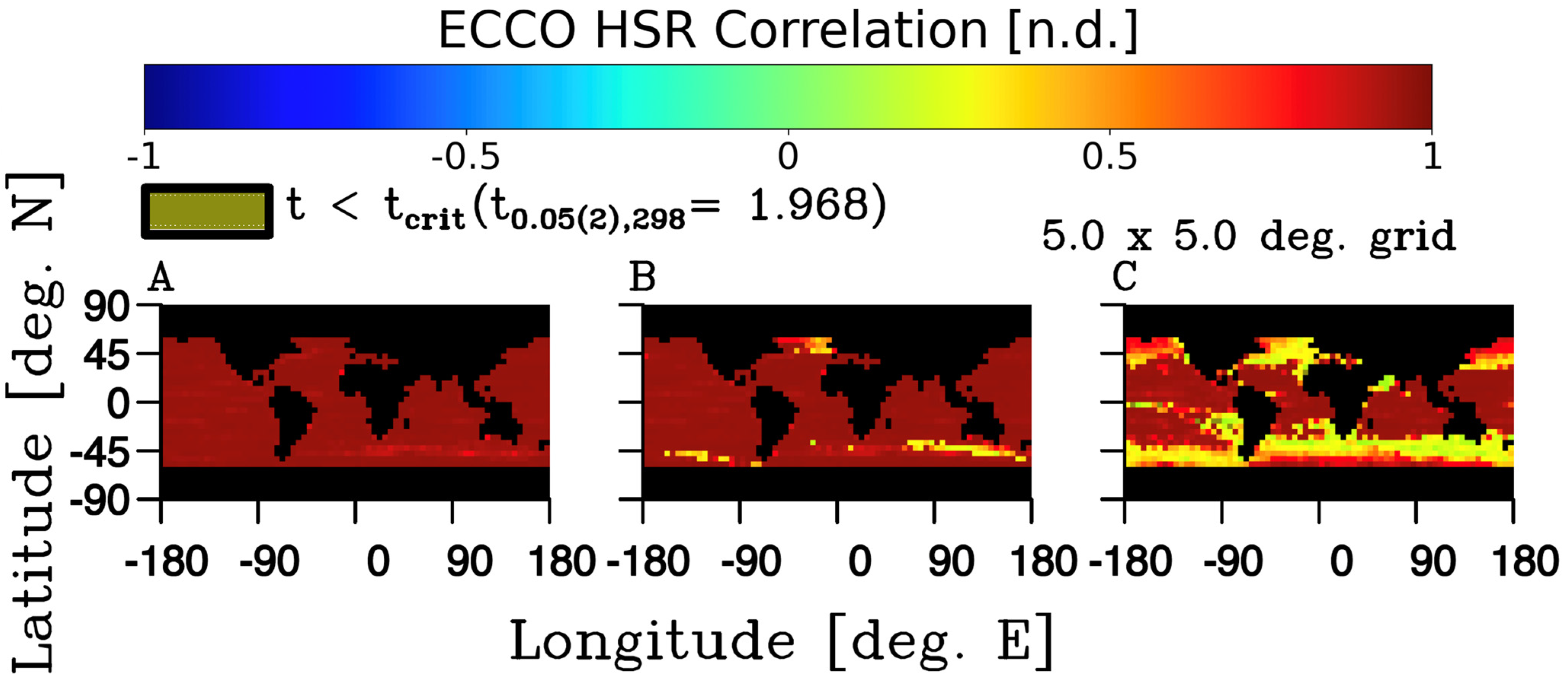
3.4. Comparison of OSSE Brillouin Lidar Flights with Other HSR Calculations
4. Discussion
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Church, J.A.; White, N.J.; Konikow, L.F.; Dominques, C.M.; Cogley, J.G.; Rignot, E.; Gregory, J.M.; van den Broeke, M.R.; Monaghan, A.J.; Velicogna, I. Revisiting the Earth’s sea-level and energy budgets from 1961 to 2008. Geophys. Res. Lett. 2011, 38, L18601. [Google Scholar] [CrossRef]
- Levitus, S.; Antonov, J.I.; Boyer, T.P.; Baranova, O.K.; Garcia, H.E.; Locarnini, R.A.; Mishonov, A.V.; Reagan, J.R.; Seidov, D.; Yarosh, E.S.; et al. World ocean heat content and thermosteric sea level change (0–2000 m), 1955–2010. Geophys. Res. Lett. 2012, 23, L10603. [Google Scholar] [CrossRef]
- Seneviratne, S.I.; Zhang, X.; Adnan, M.; Badi, W.; Dereczynski, C.; Di Luca, A.; Ghosh, S.; Iskandar, I.; Kossin, J.; Lewis, S.; et al. Weather and Climate Extreme Events in a Changing Climate. In Climate Change 2021: The Physical Science Basis: Contribution of Working Group I to the Sixth Assessment Report of the Intergovernmental Panel on Climate Change; Masson-Delmotte, V., Zhai, P., Pirani, A., Connors, S.L., Péan, C., Berger, C., Caud, N., Chen, Y., Goldfarb, L., Gomis, M.I., et al., Eds.; Cambridge University Press: Cambridge, UK; New York, NY, USA, 2021; pp. 1513–1766. [Google Scholar] [CrossRef]
- Rhein, M.; Rintoul, S.R.; Aoki, S.; Campos, E.; Chambers, D.; Feely, R.A.; Gulev, S.; Johnson, G.C.; Josey, S.A.; Kostianoy, A.; et al. Observations: Ocean. In Climate Change 2013: The Physical Science Basis. Contribution of Working Group I to the Fifth Assessment Report of the Intergovernmental Panel on Climate Change; Stocker, T.F., Qin, D., Plattner, G.-K., Tignor, M., Allen, S.K., Boschung, J., Nauels, A., Xia, Y., Bex, V., Midgley, P.M., Eds.; Cambridge University Press: Cambridge, UK; New York, NY, USA, 2013; pp. 215–314. [Google Scholar]
- Fox-Kemper, B.; Hewitt, H.T.; Xiao, C.; Alðalgeirsdóttir, G.; Drijfhout, S.S.; Edwards, T.L.; Golledge, N.R.; Hemer, M.; Kopp, R.E.; Krinner, G.; et al. Ocean Cryosphere and Sea Level Change. In Climate Change 2021: The Physical Science Basis. Contribution of Working Group I to the Sixth Assessment Report of the Intergovernmental Panel on Climate Change; Masson-Delmotte, V., Zhai, P., Pirani, A., Conners, S.L., Péan, C., Berger, S., Caud, N., Chen, Y., Goldfarb, L., Gomis, M.I., et al., Eds.; Cambridge University Press: Cambridge, UK; New York, NY, USA, 2021; pp. 1211–1362. [Google Scholar] [CrossRef]
- Bindoff, N.L.; Cheung, W.W.L.; Kairo, J.G.; Arístegui, J.; Guinder, V.A.; Hallberg, R.; Hilmi, N.; Jiao, N.; Karim, M.S.; Levin, L.; et al. Changing Ocean, Marine ecosystems, and Dependent Communities. In IPCC Special Report on the Ocean and Cryosphere in a Changing Climate; Pötner, H.-O., Roberts, D.C., Masson-Delmotte, V., Zhai, P., Tignor, M., Poloczanska, E., Mintenbeck, K., Alegría, A., Nicolai, M., Okem, A., et al., Eds.; Cambridge University Press: Cambridge, UK; New York, NY, USA, 2019; pp. 447–587. [Google Scholar] [CrossRef]
- Pötner, H.-O.; Roberts, D.C.; Masson-Delmotte, V.; Zhai, P.; Tignor, M.; Poloczanska, E.; Mintenbeck, K.; Alegría, A.; Nicolai, M.; Okem, A.; et al. (Eds.) IPCC Special Report on the Ocean and Cryosphere in a Changing Climate; Cambridge University Press: Cambridge, UK; New York, NY, USA, 2019; 755p. [Google Scholar] [CrossRef]
- Hughes, T.P.; Kerry, J.T.; Baird, A.H.; Connolly, S.R.; Dietzel, A.; Eakin, C.M.; Heron, S.F.; Hoey, A.S.; Hoogenboom, M.O.; Liu, G.; et al. Global warming transforms coral reef assemblages. Nature 2018, 566, 492–496. [Google Scholar] [CrossRef]
- Wong, A.P.; Wijffels, S.E.; Riser, S.C.; Pouliquen, S.; Hosoda, S.; Roemmich, D.; Gilson, J.; Johnson, G.C.; Martini, K.; Murphy, D.J.; et al. Argo Data 1999–2019: Two million temperature-salinity profiles and subsurface velocity observations from a global array of profiling floats. Front. Mar. Sci. 2020, 7, 700. [Google Scholar] [CrossRef]
- Argo. Argo float data and metadata from Global Data Assembly Centre (Argo GDAC). Seanoe 2024. [Google Scholar] [CrossRef]
- Elipot, S.; Lumpkin, R.; Perez, R.C.; Lilly, J.M.; Early, J.J.; Sykulski, A.M. A global surface drifter data set at hourly resolution. J. Geophys. Res. Ocean. 2016, 121, 2937–2966. [Google Scholar] [CrossRef]
- Elipot, S.; Sykulski, A.; Lumpkin, R.; Centurioni, L.; Pazos, M. A dataset of hourly sea surface temperature from drifting buoys. Sci. Data 2022, 9, 567. [Google Scholar]
- Dong, S.; Goni, G.; Domingues, R.; Bringas, F.; Goes, M.; Christophersen, J.; Baringer, M. Synergy of in situ and satellite ocean observations in determining meridional heat transport in the Atlantic Ocean. J. Geophys. Res. Ocean. 2021, 6, e2020JC017073. [Google Scholar] [CrossRef]
- Boers, N. Observation-based early-warning signals for a collapse of the Atlantic Meridional Overturning Circulation. Nat. Clim. Change 2021, 11, 680–688. [Google Scholar] [CrossRef]
- Li, S.; Chen, C.; Wu, Z.; Beardsley, R.C.; Li, M. Impacts of oceanic mixed layer in hurricanes: A simulation experiment with Hurricane Sandy. J. Geophys. Res. Ocean. 2020, 125, e2019JC015851. [Google Scholar] [CrossRef]
- Gu, C.; Qi, J.; Zhao, Y.; Yin, W.; Zhu, S. Estimation of the mixed layer depth in the Indian Ocean from surface parameters: A clustering-neural network method. Sensors 2022, 22, 5600. [Google Scholar] [CrossRef]
- Yuan, D.; Chen, P.; Mao, Z.; Zhang, X.; Zhang, Z.; Xie, C.; Zhong, C.; Qian, Z. Ocean mixed layer depth estimation using airborne Brillouin scattering lidar: Simulation and model. Appl. Opt. 2021, 60, 11180–11188. [Google Scholar] [CrossRef] [PubMed]
- Domingues, C.M.; Church, J.A.; White, N.J.; Glecker, P.J.; Wijffels, S.E.; Barker, P.M.; Dunn, J.R. Improved estimates of upper-ocean warming and multi-decadal sea-level rise. Nature 2008, 453, 1090–1093. [Google Scholar] [CrossRef] [PubMed]
- Wijffels, S.; Roemmich, D.; Monselesan, D.; Church, J.; Gilson, J. Ocean temperatures chronicle the ongoing warming of Earth. Nat. Clim Change 2016, 6, 116–118. [Google Scholar] [CrossRef]
- Von Schuckmann, K.; Minière, A.; Gues, F.; Cuesta-Valero, F.J.; Kirchengast, G.; Adusumilli, S.; Straneo, F.; Ablain, M.; Allan, R.P.; Barker, P.M.; et al. Heat stored in the Earth system 1960–2020: Where does the energy go? Earth Syst. Sci. Data 2023, 15, 1675–1709. [Google Scholar] [CrossRef]
- Moisan, J.R.; Niiler, P.P. The seasonal heat budget of the North Pacific: Net Heat Flux and Heat Storage Rates (1950–1990). J. Phys. Oceanogr. 1998, 28, 401–421. [Google Scholar] [CrossRef]
- Hunter, K. The temperature dependence of pH in surface seawater. Deep Sea Res. Part I Oceanogr. Res. Pap. 1998, 45 Pt 1, 1919–1930. [Google Scholar] [CrossRef]
- Millero, F.J.; Lee, K.; Roche, M. Distribution of alkalinity in the surface waters of the major oceans. Mar. Chem. 1998, 60, 111–130. [Google Scholar] [CrossRef]
- Stramma, L.; Johnson, G.C.; Sprintall, J.; Mohrholz, V. Expanding oxygen-minimum zones in the tropical oceans. Science 2008, 320, 655–658. [Google Scholar] [CrossRef]
- Schmidtko, S.; Stramma, L.; Visbeck, M. Decline in global oceanic oxygen content during the past five decades. Nature 2017, 542, 335–339. [Google Scholar] [CrossRef]
- Bakker, D.C.E.; de Baar, H.J.W.; de Jong, E. The dependence on temperature and salinity of dissolved inorganic carbon in East Atlantic surface waters. Mar. Chem. 1999, 65, 263–280. [Google Scholar] [CrossRef]
- Eppley, R.W. Temperature and phytoplankton growth in the sea. Fish. Bull. 1972, 70, 1063–1085. [Google Scholar]
- Moisan, J.R.; Moisan, T.A.; Abbott, M.R. Modeling the effect of temperature on the maximum growth rates of phytoplankton populations. Ecol. Model. 2002, 153, 197–215. [Google Scholar] [CrossRef]
- Grimaud, G.M.; Le Guennec, V.; Ayata, S.-D.; Mairet, F.; Sciandra, A.; Bernard, O. Modeling the effect of temperature on phytoplankton growth across global ocean. IFAC-PapersOnLine 2015, 48, 228–233. [Google Scholar] [CrossRef]
- Huntley, M.W.; Lopez, M.D.G. Temperature-dependent production of marine copepods: A global synthesis. Am. Nat. 1992, 140, 201–242. [Google Scholar] [CrossRef]
- Merchant, C.J.; Embury, O.; Bulgin, C.E.; Block, T.; Corlett, G.K.; Fielder, E.; Good, S.A.; Mittaz, J.; Rayner, N.A.; Berry, D.; et al. Satellite-based time-series of sea surface temperature since 1981 for climate applications. Sci. Data 2019, 6, 223. [Google Scholar] [CrossRef]
- Forget, G.; Campin, J.-M.; Heimbach, P.; Hill, C.N.; Ponte, R.M.; Wunsch, C. ECCO version 4: An integrated framework for non-linear inverse modeling and global ocean state estimation. Geosci. Model Dev. 2015, 8, 3071–3104. [Google Scholar] [CrossRef]
- Hirschberg, J.G.; Wouters, A.W.; Cooke, F.N.; Simon, K.M.; Byrne, J.D. Laser Application to Measure Vertical Sea Temperature and Turbidity. 1975. Available online: https://ntrs.nasa.gov/citations/19770006465 (accessed on 2 January 2024).
- Hirschberg, J.G.; Byrne, J.D.; Wouters, A.W.; Boynton, G.C. Speed of sound and temperature in the ocean by Brillouin scattering. Appl. Opt. 1984, 23, 2624–2628. [Google Scholar] [CrossRef]
- Fry, E.S.; Emery, Y.; Quan, X.; Katz, J.W. Accuracy limitations on Brillouin lidar measurements of temperature and sound speed in the ocean. Appl. Opt. 1997, 36, 6887–6894. [Google Scholar] [CrossRef]
- Rudolf, A.; Walther, T. Laboratory demonstration of a Brillouin lidar to remotely measure temperature profiles of the ocean. Opt. Eng. 2014, 53, 051407. [Google Scholar] [CrossRef]
- Hickman, G.D.; Harding, J.M.; Carnes, M.; Pressman, A.; Kattawar, G.W.; Fry, S. Aircraft laser sensing of sound velocity in water: Brillouin scattering. Remote Sens. Environ. 1991, 36, 165–178. [Google Scholar] [CrossRef]
- Millar, R.C.; Seaver, G. An index of refraction algorithm for seawater over temperature, pressure, salinity, density, and wavelength. Deep-Sea Res. 1990, 37, 1909–1926. [Google Scholar] [CrossRef]
- Chen, C.-T.; Millero, F.J. Speed of sound in seawater at high pressure. J. Acoust. Soc. Am. 1977, 62, 1129–1135. [Google Scholar] [CrossRef]
- Wong, G.S.K.; Zhu, S. Speed of sound in seawater as a function of salinity, temperature, and pressure. J. Acoust. Soc. Am. 1995, 97, 1732–1736. [Google Scholar] [CrossRef]
- Collins, D.J.; Bell, J.; Zanoni, R.; McDermid, I.S.; Breckenridge, J.; Sepulveda, C.A. Recent progress in the measurement of temperature and salinity by optical scattering. Ocean. Opt. VII 1984, 489, 247–269. [Google Scholar] [CrossRef]
- Yang, Y.; Shangguan, M. Inversion of seawater temperature, salinity, and sound velocity based on Brillouin lidar. J. Mod. Opt. 2023, 70, 470–482. [Google Scholar] [CrossRef]
- Wang, Y.; Xu, Y.; Chen, P.; Liang, K. Remote sensing of seawater temperature profiles by the Brillouin lidar based on a Frizeau interferometer and multichannel photomultiplier tube. Sensors 2023, 23, 446. [Google Scholar] [CrossRef] [PubMed]
- Liang, K.; Ma, Y.; Yu, Y.; Huang, J.; Li, H. Research on simultaneous measurement of ocean temperature and salinity using Brillouin shift and linewidth. Opt. Eng. 2012, 51, 066002. [Google Scholar] [CrossRef]
- Yu, Y.; Ma, Y.; Li, H.; Huang, J.; Fang, Y.; Liang, K.; Zhou, B. Simulation of simultaneously obtaining ocean temperature and salinity using dual-wavelength Brillouin lidar. Laser Phys. Lett. 2014, 11, 036001. [Google Scholar] [CrossRef]
- Trees, C.; Arnone, R. Airborne LIDAR as a tool for estimating inherent optical properties. Ocean. Sens. Monit. IV 2012, 83, 187–191. [Google Scholar] [CrossRef]
- Yuan, D.; Chen, P.; Mao, Z.; Zhenhua, Z. Potential of spaceborne Brillouin scattering lidar for global ocean optical profiling. Opt. Express 2021, 29, 43049–43067. [Google Scholar] [CrossRef]
- Garcia, H.E.; Boyer, T.P.; Baranova, O.K.; Locarnini, R.A.; Mishonov, A.V.; Grodsky, A.; Paver, C.R.; Weathers, K.W.; Smolyar, I.V.; Reagan, J.R.; et al. World Ocean Atlas 2018: Product Documentation. 2019. Available online: https://data.nodc.noaa.gov/woa/WOA18/DOC/woa18documentation.pdf (accessed on 6 November 2023).
- Del Grosso, V.A. New equation for the speed of sound in natural waters (with comparisons to other equations). J. Acoust. Soc. Am. 1974, 56, 1084–1091. [Google Scholar] [CrossRef]
- Xu, N.; Liu, Z.; Zhang, X.; Xu, Y.; Luo, N.; Li, S.; Xu, J.; He, X.; Shi, J. Influence of temperature-salinity-depth structure of the upper-ocean on the frequency shift of Brillouin LiDAR. Opt. Express 2021, 29, 36442–36452. [Google Scholar] [CrossRef] [PubMed]
- Shi, J.; Xu, N.; Luo, N.; Li, S.; Xu, J.; He, X. Retrieval of sound-velocity profile in ocean by employing Brillouin scattering LiDAR. Opt. Express 2022, 30, 16419–16431. [Google Scholar] [CrossRef]
- Forget, G.; Campin, J.-M.; Heimbach, P.; Hill, C.N.; Ponte, R.M.; Wunsch, C. ECCO Version 4: Second Release; MIT Libraries: Boston, MA, USA, 2016; Available online: http://hdl.handle.net/1721.1/102062 (accessed on 2 January 2024).
- Fukumori, I.; Wang, O.; Fenty, I.; Forgot, G.; Heimbach, P.; Ponte, R.M. ECCO Version 4 Release 4. 2020. Available online: https://www.ecco-group.org/docs/v4r4_synopsis.pdf (accessed on 9 January 2022).
- ECCO Consortium; Fukumori, I.; Wang, O.; Fenty, I.; Forgot, G.; Heimbach, P.; Ponte, R.M. ECCO Central Estimate (Version 4 Release 4). Available online: https://archive.podaac.earthdata.nasa.gov/-podaac-ops-cumulus-protected/ECCO_L4_-TEMP_SALINITY_05DEG_DAILY_V4R4/ (accessed on 9 January 2022).
- Von Schuckmann, K.; Minière, A.; Gues, F.; Cuesta-Valero, F.J.; Kirchengast, G.; Adusumilli, S.; Straneo, F.; Allan, R.; Barker, P.M.; Beltrami, H.; et al. GCOS EHI 1960–2020 Earth Heat Inventory Ocean Heat Content; World Data Center for Climate (WDCC) at DKRZ: Hamburg, Germany, 2022. [Google Scholar] [CrossRef]
- De Boyer Montégut, C.; Madec, G.; Fischer, A.S.; Lazar, A.; Iudicone, D. Mixed layer depth over the global ocean: An examination of profile data and a profile-based climatology. J. Geophys. Res. 2004, 109, C12003. [Google Scholar] [CrossRef]
- Holte, J.; Talley, L.D.; Gilson, J.; Roemmich, D. An Argo mixed layer climatology and database. Geophys. Res. Lett. 2017, 44, 5618–5626. [Google Scholar] [CrossRef]
- Holte, J.; Talley, L. A New algorithm for finding mixed layer depths with applications to Argo data and Subantarctic Mode Water formation. J. Atmos. Ocean. Tech. 2009, 26, 1920–1939. [Google Scholar] [CrossRef]
- Kara, A.B.; Rochford, P.A.; Hurlburt, H.E. An optimal definition for ocean mixed layer depth. J. Geophys. Res. 2000, 105, 16803–16821. [Google Scholar] [CrossRef]
- Kara, A.B.; Rochford, P.A.; Hurlburt, H.E. Mixed layer depth variability over the global ocean. J. Geophys. Res. 2003, 108, 3079. [Google Scholar] [CrossRef]
- Wilson, R.T. Py6S: A Python interface to the 6S radiative transfer model. Comput. Geosci. 2013, 51, 166–171. [Google Scholar] [CrossRef]
- McManamon, P.F. Field Guide to Lidar; SPIE Press: Bellingham, WA, USA, 2015. [Google Scholar]
- Yura, H.T. Threshold detection in the presence of atmospheric turbulence. Appl. Opt. 1995, 34, 1097–1102. [Google Scholar] [CrossRef]
- Gordon, H.R. Interpretation of airborne oceanic lidar: Effects of multiple scattering. Appl. Opt. 1982, 21, 2996–3001. [Google Scholar] [CrossRef] [PubMed]
- Joelson, B.D.; Kattawar, G.W. Multiple scattering effects on the remote sensing of the speed of sound in the ocean by Brillouin scattering. Appl. Opt. 1996, 35, 2693–2701. [Google Scholar] [CrossRef] [PubMed]
- Solonenko, M.G.; Mobley, C.D. Inherent optical properties of Jerlov water types. Appl. Opt. 2015, 54, 5392–5401. [Google Scholar] [CrossRef] [PubMed]
- Huguenin, M.F.; Holmes, R.M.; England, M.H. Drivers and distribution of global ocean heat uptake over the last half century. Nat. Commun. 2022, 13, 4921. [Google Scholar] [CrossRef] [PubMed]
- Chambers, D.P.; Tapley, B.D.; Stewart, R.H. Long-period heat storage rates and basin-scale heat fluxes from TOPEX. J. Geophys. Res. Oceans. 1997, 102, 10525–10533. [Google Scholar] [CrossRef]
- Cheng, L.; Trenberth, K.E.; Fasullo, J.; Boyer, T.; Abraham, J.; Zhu, J. Improved estimates of ocean heat content from 1960 to 2015. Sci. Adv. 2017, 3, e1601545. [Google Scholar] [CrossRef] [PubMed]
- Cheng, L.; Abraham, J.; Trenberth, K.E.; Fasullo, J.; Boyer, T.; Mann, M.E.; Zhu, J.; Wang, F.; Locarnini, R.; Li, Y.; et al. Another year of record heat for the oceans. Adv. Atmos. Sci. 2023, 40, 963–974. [Google Scholar] [CrossRef] [PubMed]
- Schutgens, N.A.J.; Gryspeerdt, E.; Weigum, N.; Tsyro, S.; Goto, D.; Schluz, M.; Steir, P. Will a perfect model agree with observations? The impact of spatial sampling. Atmos. Chem. Phys. 2016, 16, 6335–6353. [Google Scholar] [CrossRef]
- Goni, G.J.; Sprintall, J.; Bringas, F.; Cheng, L.; Cirano, M.; Dong, S.; Domingues, R.; Goes, M.; Lopez, H.; Morrow, R.; et al. More than 50 years of successful continuous temperature section measurements by the Global Expendable Bathythermograph Network, its integrability, societal benefits, and future. Front. Mar. Sci. 2019, 6, 452. [Google Scholar] [CrossRef]
- Gwyther, D.E.; Roughan, M.; Colette, K.; Keating, S.R. Impact of assimilating repeated subsurface temperature transects on state estimates of a western boundary current. Front. Mar. Sci. 2023, 9, 1084784. [Google Scholar] [CrossRef]
- Gwyther, D.E.; Kerry, C.; Roughan, M.; Keating, S.R. Observing system simulation experiments reveal that subsurface temperature observations improve estimates of circulation and heat content in a dynamic western boundary current. Geosci. Model. Dev. 2022, 15, 6541–6565. [Google Scholar] [CrossRef]
- Gwyther, D.E.; Keating, S.R.; Kerry, C.; Roughan, M. How does 4DVar data assimilation effect the vertical representation of mesoscale eddies? A case study with observing system simulation experiments (OSSEs) using ROMS v3.9. Geosci. Model. Dev. 2023, 16, 157–178. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Symbol | Parameter Name [units] | Value |
|---|---|---|
| Earth Orbital Period | [s] | 86,400 |
| Satellite Orbital Period | [s] | 5988.4 |
| Initial Time | [s] | |
| Satellite orbital inclination |
| Experiment No. | ‘Nature’ vs. OSSE | Gridded vs. Flight Sampling Simulation | Integration Depth Criteria |
|---|---|---|---|
| 1 | Nature Baseline Solution | Gridded | ECCO model bottom |
| 2 | Nature | Gridded | SIO Argo deepest climatology MLD |
| 3 | Nature | Gridded | ECCO deepest MLD |
| 4 | Nature | Gridded | ECCO deepest climatology mean + 2 std. dev. MLD * |
| 5 | OSSE | Flight sampling simulation | ECCO model bottom |
| 6 | OSSE | Flight sampling simulation | SIO Argo deepest climatology MLD |
| 7 | OSSE | Flight sampling simulation | ECCO deepest MLD |
| 8 | OSSE | Flight sampling simulation | ECCO deepest climatology mean + 2 std. dev. MLD * |
| 9 | OSSE | Ship-mounted [0 m] flight simulation | SIO Argo deepest climatology MLD with Brillouin lidar probability-limited |
| 10 | OSSE | LEO flight simulation | SIO Argo deepest climatology MLD with Brillouin lidar probability-limited |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Moisan, J.R.; Rousseaux, C.S.; Stysley, P.R.; Clarke, G.B.; Poulios, D.P. Ocean Temperature Profiling Lidar: Analysis of Technology and Potential for Rapid Ocean Observations. Remote Sens. 2024, 16, 1236. https://doi.org/10.3390/rs16071236
Moisan JR, Rousseaux CS, Stysley PR, Clarke GB, Poulios DP. Ocean Temperature Profiling Lidar: Analysis of Technology and Potential for Rapid Ocean Observations. Remote Sensing. 2024; 16(7):1236. https://doi.org/10.3390/rs16071236
Chicago/Turabian StyleMoisan, John R., Cecile S. Rousseaux, Paul R. Stysley, Gregory B. Clarke, and Demetrios P. Poulios. 2024. "Ocean Temperature Profiling Lidar: Analysis of Technology and Potential for Rapid Ocean Observations" Remote Sensing 16, no. 7: 1236. https://doi.org/10.3390/rs16071236
APA StyleMoisan, J. R., Rousseaux, C. S., Stysley, P. R., Clarke, G. B., & Poulios, D. P. (2024). Ocean Temperature Profiling Lidar: Analysis of Technology and Potential for Rapid Ocean Observations. Remote Sensing, 16(7), 1236. https://doi.org/10.3390/rs16071236