



Inland Water Level Monitoring from Satellite Observations: A Scoping Review of Current Advances and Future Opportunities



Abstract
1. Introduction
2. Methodological Framework
2.1. Search and Selection Strategy
2.2. Selection Criteria
- Peer-reviewed scientific journals, proceedings, and review papers have to be published between 1 January 2018 and 31 December 2022;
- Publications must be written in the English language;
- Publications encompass data from satellite missions with in-situ sensors or other spaceborne missions for the validation/assessment of the proposed methods;
- Studies that include statistical accuracy metrics for the validation/assessment of the performances of satellite missions.
- Publications that are not mainly oriented in inland water level monitoring but generally in the water cycle, water dynamics (such as water volume variations, surface water extent, and river discharge), or in hydrologic/hydrodynamic models of a river;
- Any article that is mainly oriented in sea surface, coastal, or ocean water level monitoring, and not in inland water level monitoring;
- Exclusion of publications that do not calculate water level heights but are focused only on the analysis of a satellite mission.
2.3. Charting the Data: Transformation, Analysis, and Interpretation
2.4. From Data to Information, towards Decision Making
2.5. Bias Control
3. Review Results
3.1. Satellite Missions for Inland Water Level Monitoring
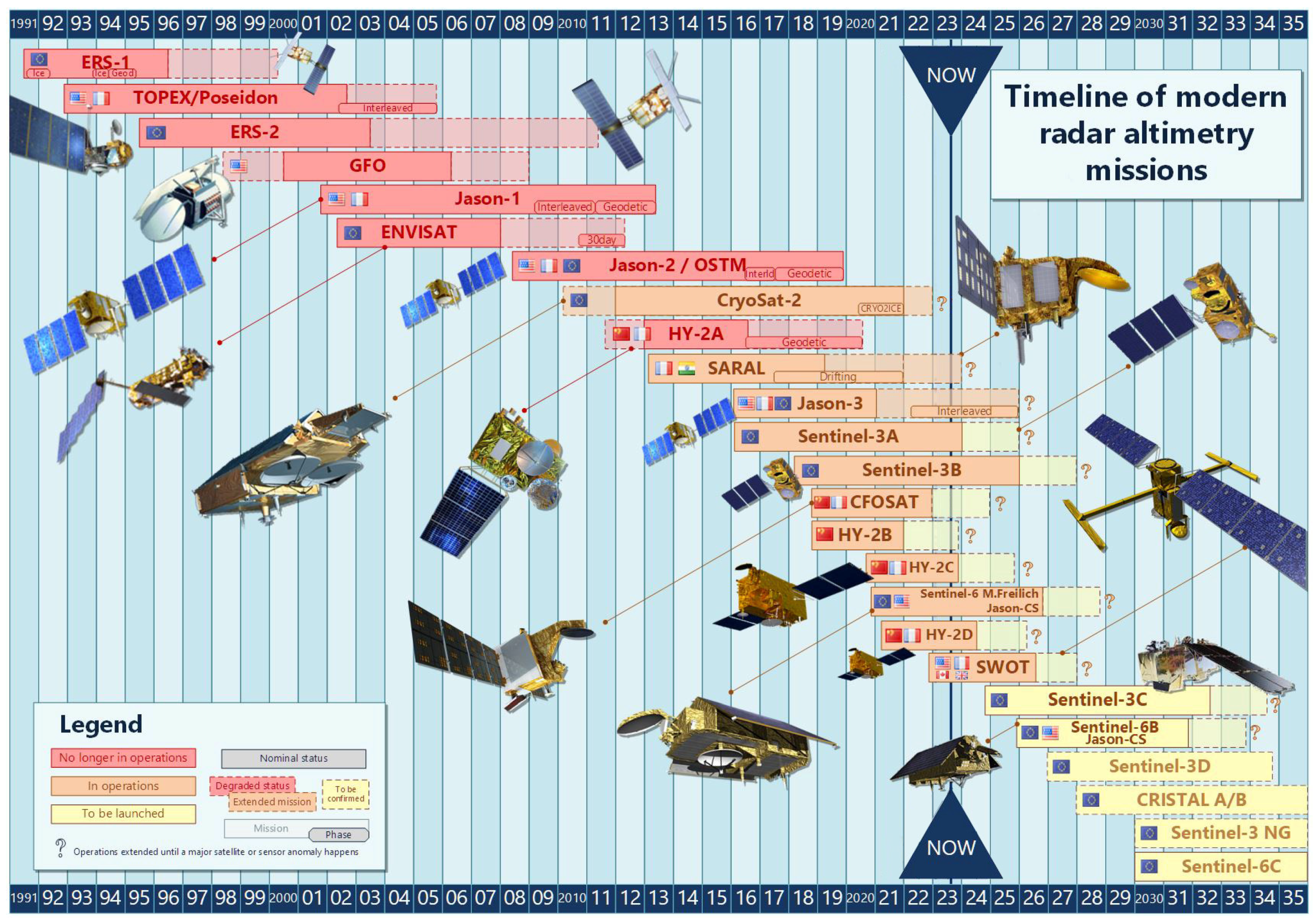
3.1.1. Radar Altimetry Satellite Missions
3.1.2. Laser Altimetry Satellite Missions
3.1.3. Other Satellite Missions
3.2. Waveform Retracking
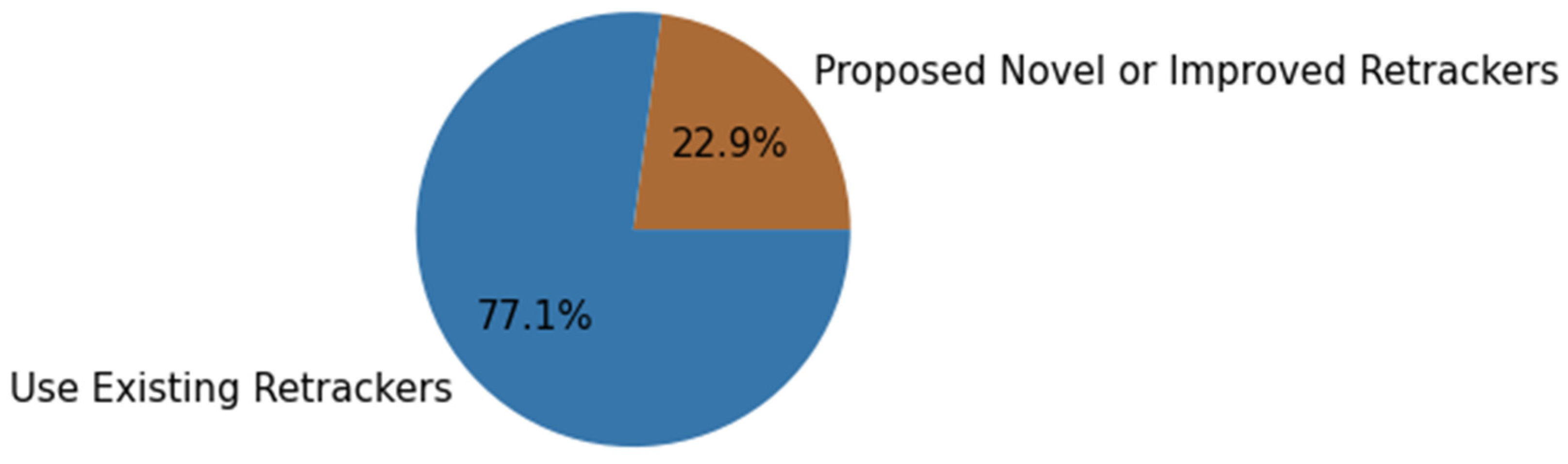
3.2.1. Novel and Improved Retracking Algorithms
3.2.2. Official Retracking Algorithms
3.3. Study Regions
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Agency | Webpage |
|---|---|
| National Water Information System, America | https://maps.waterdata.usgs.gov/mapper/index.html |
| National Hydrometric Network, Canada | https://wateroffice.ec.gc.ca/ |
| Meteorological and Hydrological Institute, Sweden | https://www.smhi.se/data/meteorologi/ |
| Center for Operational Oceanographic Products and Services, U.S. | https://tidesandcurrents.noaa.gov/ |
| River Water and Snowpack Data, Colorado | http://lakemead.water-data.com/ |
| Water Data, Texas | https://www.waterdatafortexas.org/reservoirs/ |
| Water Data, Australia | http://www.bom.gov.au/waterdata/ |
| Finnish Environment Institute (SYKE), Finland | https://www.syke.fi/en-US |
| Ministry of Water Resources, China | http://www.yellowriver.gov.cn/ |
| Chinese Academy of Sciences, China | http://www.tpedatabase.cn/ |
| Sindh Irrigation and Drainage Authority, Pakistan | https://sida.org.pk/ |
| Environmental Protection Agency, U.S. | https://www.epa.gov/climate-indicators/great-lakes |
| Federal Office for the Environment, Hydrology Department, Switzerland | https://www.hydrodaten.admin.ch/ |
| National Service of Meteorology and Hydrology of Peru | https://www.gob.pe/senamhi |
| Mekong River Commission | https://portal.mrcmekong.org/time-series/water-level |
| Ministry of Infrastructure and Water Management, Netherlands | https://waterinfo.rws.nl/#!/kaart/waterhoogte-t-o-v-nap/ |
| Rivers Agency Coleraine | https://www.dardni.gov.uk/rivers-agency |
| Electricity Supply Board | https://www.esb.ie/ |
| Data Center for Eco-Environment Protection in the Qinghai Lake | http://qhh.qhemdc.cn/ |
| Jiangsu Provincial Department of water resources | http://jssslt.jiangsu.gov.cn/ |
| Ma’anshan water management system | http://www.masswj.net:9009/ahwater/website/index.html |
| Hydrologic Information System, Ebro data hub, Spain | http://www.saihebro.com/saihebro/index.php |
| Brazilian Water Agency ANA | http://www2.ana.gov.br |
| Malian Hydrological Service, Ministry of Energy and Water | https://dnhmali.org/ |
| US Army Corps of Engineers | https://rivergages.mvr.usace.army.mil/WaterControl/new/layout.cfm |
| India-Water Resource Information System (WRIS) | https://indiawris.gov.in/wris/#/ |
| Water resources data of the Qinghai Tibet Plateau | https://data.casearth.cn/en/sdo/detail/614c6a4008415d75145ecb9e |
| Water resources data of France | https://www.hydro.eaufrance.fr/ |
| Changjiang Water Resources Commission, China | http://www.cjh.com.cn/ |
| Interregional Agency of Po River, Italy | https://www.agenziapo.it/ |
| Database/Product | Website | Operated by |
|---|---|---|
| DAHITI | https://dahiti.dgfi.tum.de/en/ | German Geodetic Research Institute-Technical University of Munich (DGFI-TUM) |
| Hydroweb | https://hydroweb.theia-land.fr/ | CNES |
| Hydrosat | http://hydrosat.gis.uni-stuttgart.de | Institute of Geodesy-University of Stuggart |
| G-REALM | https://ipad.fas.usda.gov/cropexplorer/global_reservoir/ | United States Department of Agriculture |
| GRRATS | https://doi.org/10.5067/PSGRA-SA2V1 | Ohio State University |
| C3S LWL | https://doi.org/10.24381/cds.5714c668 | Copernicus and European Commision |
| Water Level by CGLS | https://land.copernicus.eu/global/products/wl | Copernicus Global Land Operations CNES, CLS, and LEGOS |
References
- Postel, S.L. Entering an Era of Water Scarcity: The Challenges Ahead. Ecol. Appl. 2000, 10, 941–948. [Google Scholar] [CrossRef]
- Albert, J.S.; Destouni, G.; Duke-Sylvester, S.M.; Magurran, A.E.; Oberdorff, T.; Reis, R.E.; Winemiller, K.O.; Ripple, W.J. Scientists’ warning to humanity on the freshwater biodiversity crisis. Ambio 2021, 50, 85–94. [Google Scholar] [CrossRef]
- Vörösmarty, C.J.; McIntyre, P.B.; Gessner, M.O.; Dudgeon, D.; Prusevich, A.; Green, P.; Glidden, S.; Bunn, S.E.; Sullivan, C.A.; Liermann, C.R.; et al. Global threats to human water security and river biodiversity. Nature 2010, 467, 555–561. [Google Scholar] [CrossRef] [PubMed]
- Bastviken, D.; Tranvik, L.J.; Downing, J.A.; Crill, P.M.; Enrich-Prast, A. Freshwater Methane Emissions Offset the Continental Carbon Sink. Science 2011, 331, 50. [Google Scholar] [CrossRef]
- Shao, C.; Chen, J.; Stepien, C.A.; Chu, H.; Ouyang, Z.; Bridgeman, T.B.; Czajkowski, K.P.; Becker, R.H.; John, R. Diurnal to annual changes in latent, sensible heat, and CO2 fluxes over a Laurentian Great Lake: A case study in Western Lake Erie. J. Geophys. Res. Biogeosci. 2015, 120, 1587–1604. [Google Scholar] [CrossRef]
- Stephens, G.L.; Slingo, J.M.; Rignot, E.; Reager, J.T.; Hakuba, M.Z.; Durack, P.J.; Worden, J.; Rocca, R. Earth’s water reservoirs in a changing climate. Proc. R. Soc. A Math. Phys. Eng. Sci. 2020, 476, 20190458. [Google Scholar] [CrossRef] [PubMed]
- Chahine, M.T. The hydrological cycle and its influence on climate. Nature 1992, 359, 373–380. [Google Scholar] [CrossRef]
- Blango, M.M.; Cooke, R.A.; Moiwo, J.P. Effect of soil and water management practices on crop productivity in tropical inland valley swamps. Agric. Water Manag. 2019, 222, 82–91. [Google Scholar] [CrossRef]
- Tranvik, L.J.; Downing, J.A.; Cotner, J.B.; Loiselle, S.A.; Striegl, R.G.; Ballatore, T.J.; Dillon, P.; Finlay, K.; Fortino, K.; Knoll, L.B.; et al. Lakes and reservoirs as regulators of carbon cycling and climate. Limnol. Oceanogr. 2009, 54, 2298–2314. [Google Scholar] [CrossRef]
- Trenberth, K.E.; Fasullo, J.T.; Mackaro, J. Atmospheric Moisture Transports from Ocean to Land and Global Energy Flows in Reanalyses. J. Clim. 2011, 24, 4907–4924. [Google Scholar] [CrossRef]
- GRDC: Global Runoff Database Center—River Discharge Data. Available online: https://www.bafg.de/GRDC (accessed on 28 February 2024).
- Riegger, J.; Tourian, M.; Devaraju, B.; Sneeuw, N. Analysis of grace uncertainties by hydrological and hydro-meteorological observations. J. Geodyn. 2012, 59–60, 16–27. [Google Scholar] [CrossRef]
- Strassberg, G.; Scanlon, B.R.; Rodell, M. Comparison of seasonal terrestrial water storage variations from GRACE with groundwater-level measurements from the High Plains Aquifer (USA). Geophys. Res. Lett. 2007, 34, L14402. [Google Scholar] [CrossRef]
- Papa, F.; Frappart, F. Surface Water Storage in Rivers and Wetlands Derived from Satellite Observations: A Review of Current Advances and Future Opportunities for Hydrological Sciences. Remote Sens. 2021, 13, 4162. [Google Scholar] [CrossRef]
- Massachusetts Institute of Technology. Williamstown Report, NASA CR-1579; Massachusetts Institute of Technology: Cambridge, MA, USA, 1970. Available online: http://ilrs.gsfc.nasa.gov/docs/williamstown_1968.pdf (accessed on 28 February 2024).
- Pierson, W.J.; Mehr, E. Average Return Pulse Form and Bias for the S193 Radar Altimeter on Skylab as a Function of Wave Conditions. Use Artif. Satell. Geod. 1972, 15, 217–226. [Google Scholar] [CrossRef]
- Fu, L. Recent progress in the application of satellite altimetry to observing the mesoscale variability and general circulation of the oceans. Rev. Geophys. 1983, 21, 1657–1666. [Google Scholar] [CrossRef]
- Vignudelli, S.; Birol, F.; Benveniste, J.; Fu, L.-L.; Picot, N.; Raynal, M.; Roinard, H. Satellite Altimetry Measurements of Sea Level in the Coastal Zone. Surv. Geophys. 2019, 40, 1319–1349. [Google Scholar] [CrossRef]
- McConathy, D.R.; Kilgus, C.C. The navy geosat mission: An overview. Johns Hopkins APL Tech. Dig. 1987, 8, 170–175. [Google Scholar]
- Fu, L.; Christensen, E.J.; Yamarone, C.A.; Lefebvre, M.; Ménard, Y.; Dorrer, M.; Escudier, P. TOPEX/POSEIDON mission overview. J. Geophys. Res. Ocean. 1994, 99, 24369–24381. [Google Scholar] [CrossRef]
- Desjonquères, J.D.; Carayon, G.; Steunou, N.; Lambin, J. Poseidon-3 Radar Altimeter: New Modes and In-Flight Performances. Mar. Geod. 2010, 33, 53–79. [Google Scholar] [CrossRef]
- Nielsen, K.; Stenseng, L.; Andersen, O.B.; Villadsen, H.; Knudsen, P. Validation of CryoSat-2 SAR mode based lake levels. Remote Sens. Environ. 2015, 171, 162–170. [Google Scholar] [CrossRef]
- Villadsen, H.; Deng, X.; Andersen, O.B.; Stenseng, L.; Nielsen, K.; Knudsen, P. Improved inland water levels from SAR altimetry using novel empirical and physical retrackers. J. Hydrol. 2016, 537, 234–247. [Google Scholar] [CrossRef]
- Taburet, N.; Zawadzki, L.; Vayre, M.; Blumstein, D.; Le Gac, S.; Boy, F.; Raynal, M.; Labroue, S.; Crétaux, J.-F.; Femenias, P. S3MPC: Improvement on Inland Water Tracking and Water Level Monitoring from the OLTC Onboard Sentinel-3 Altimeters. Remote Sens. 2020, 12, 3055. [Google Scholar] [CrossRef]
- Biancamaria, S.; Lettenmaier, D.P.; Pavelsky, T.M. The SWOT Mission and Its Capabilities for Land Hydrology. Surv. Geophys. 2016, 37, 307–337. [Google Scholar] [CrossRef]
- Wunsch, C.; Gaposchkin, E.M. On using satellite altimetry to determine the general circulation of the oceans with application to geoid improvement. Rev. Geophys. 1980, 18, 725–745. [Google Scholar] [CrossRef]
- Fu, L.; Cheney, R.E. Application of satellite altimetry to ocean circulation studies: 1987–1994. Rev. Geophys. 1995, 33, 213–223. [Google Scholar] [CrossRef]
- Calmant, S.; Seyler, F.; Cretaux, J.F. Monitoring Continental Surface Waters by Satellite Altimetry. Surv. Geophys. 2008, 29, 247–269. [Google Scholar] [CrossRef]
- Berry, P.A.M.; Garlick, J.D.; Freeman, J.A.; Mathers, E.L. Global inland water monitoring from multi-mission altimetry. Geophys. Res. Lett. 2005, 32, L16401. [Google Scholar] [CrossRef]
- Berry, P.A.M.; Wheeler, J.; Smith, R.G. Inland Water Monitoring from Multi-mission Satellite Radar Altimetry—Current Status and Future Capability. In Proceedings of the Symposium Earth Observation and Water Cycle Science, Frascati, Italy, 18–20 November 2009; ISBN 978-92-9221-238-4. [Google Scholar]
- Benveniste, J.; Berry, P.A.M. 2004 Monitoring River and Lakes from Space. ESA Bull. 2004, 117, 36–42. Available online: https://earth.esa.int/eogateway/documents/20142/37627/Monitoring-River-and-Lake-Levels-from-Space.pdf/5a14ce2e-3a67-e165-b525-cdd161590d7a?t=1624448249272 (accessed on 28 February 2024).
- Berry, P.A.M.; Freeman, J.A.; Garlick, J.D.; Smith, R.G.; Benveniste, J. A Decade of Global River and Lake Heights from ESA Altimeter Missions. In Proceedings of the Symposium on 15 Years of Progress in Radar Altimetry, Venice, Italy, 13–18 March 2006; Available online: https://altimetry.esa.int/riverlake/rl_docs/493_ber.pdf (accessed on 28 February 2024).
- Berry, P.A.M.; Benveniste, J. Measurement of Inland Surface Water from Multi-mission Satellite Radar Altimetry: Sustained Global Monitoring for Climate Change. In Gravity, Geoid and Earth Observation. International Association of Geodesy Symposia; Mertikas, S., Ed.; Springer: Berlin/Heidelberg, Germany, 2010; Volume 135. [Google Scholar] [CrossRef]
- Michailovsky, C.I.; McEnnis, S.; Berry, P.A.M.; Smith, R.; Bauer-Gottwein, P. River monitoring from satellite radar altimetry in the Zambezi River basin. Hydrol. Earth Syst. Sci. 2012, 16, 2181–2192. [Google Scholar] [CrossRef]
- Abdalla, S.; Kolahchi, A.A.; Ablain, M.; Adusumilli, S.; Bhowmick, S.A.; Alou-Font, E.; Amarouche, L.; Andersen, O.B.; Antich, H.; Aouf, L.; et al. Altimetry for the future: Building on 25 years of progress. Adv. Space Res. 2021, 68, 319–363. [Google Scholar] [CrossRef]
- Yang, L.; Lin, L.; Fan, L.; Liu, N.; Huang, L.; Xu, Y.; Mertikas, S.P.; Jia, Y.; Lin, M. Satellite Altimetry: Achievements and Future Trends by a Scientometrics Analysis. Remote Sens. 2022, 14, 3332. [Google Scholar] [CrossRef]
- Daudt, H.M.L.; Van Mossel, C.; Scott, S.J. Enhancing the scoping study methodology: A large, inter-professional team’s experience with Arksey and O’Malley’s framework. BMC Med. Res. Methodol. 2013, 13, 48. [Google Scholar] [CrossRef] [PubMed]
- Arksey, H.; O’Malley, L. Scoping studies: Towards a methodological framework. Int. J. Soc. Res. Methodol. 2005, 8, 19–32. [Google Scholar] [CrossRef]
- Moher, D.; Liberati, A.; Tetzlaff, J.; Altman, D.G. Preferred Reporting Items for Systematic Reviews and Meta-Analyses: The PRISMA Statement. PLoS Med. 2009, 6, e1000097. [Google Scholar] [CrossRef] [PubMed]
- Munn, Z.; Peters, M.D.J.; Stern, C.; Tufanaru, C.; McArthur, A.; Aromataris, E. Systematic review or scoping review? Guidance for authors when choosing between a systematic or scoping review approach. BMC Med. Res. Methodol. 2018, 18, 143. [Google Scholar] [CrossRef]
- Tricco, A.C.; Lillie, E.; Zarin, W.; O’Brien, K.; Colquhoun, H.; Kastner, M.; Levac, D.; Ng, C.; Sharpe, J.P.; Wilson, K.; et al. A scoping review on the conduct and reporting of scoping reviews. BMC Med. Res. Methodol. 2016, 16, 15. [Google Scholar] [CrossRef] [PubMed]
- Peters, M.D.J.; Godfrey, C.M.; Khalil, H.; McInerney, P.; Parker, D.; Soares, C.B. Guidance for conducting systematic scoping reviews. JBI Evid. Implement. 2015, 13, 141–146. [Google Scholar] [CrossRef] [PubMed]
- Mendeley Ltd. Mendeley Desktop (Version 1.19.4) [Computer Software]. Available online: https://www.mendeley.com/ (accessed on 3 November 2023).
- Howard, B.E.; Phillips, J.; Miller, K.; Tandon, A.; Mav, D.; Shah, M.R.; Holmgren, S.; Pelch, K.E.; Walker, V.; Rooney, A.A.; et al. SWIFT-Review: A text-mining workbench for systematic review. Syst. Rev. 2016, 5, 87. [Google Scholar] [CrossRef] [PubMed]
- Jonnalagadda, S.; Petitti, D. A new iterative method to reduce workload in systematic review process. Int. J. Comput. Biol. Drug Des. 2013, 6, 5–17. [Google Scholar] [CrossRef]
- Levac, D.; Colquhoun, H.; O’Brien, K.K. Scoping studies: Advancing the methodology. Implement. Sci. 2010, 5, 69. [Google Scholar] [CrossRef]
- Bryman, A.; Burgess, B. Analyzing Qualitative Data, 1st ed.; Routledge: London, UK, 1994. [Google Scholar] [CrossRef]
- Quartly, G.D.; Rinne, E.; Passaro, M.; Andersen, O.B.; Dinardo, S.; Fleury, S.; Guillot, A.; Hendricks, S.; Kurekin, A.A.; Müller, F.L.; et al. Retrieving Sea Level and Freeboard in the Arctic: A Review of Current Radar Altimetry Methodologies and Future Perspectives. Remote Sens. 2019, 11, 881. [Google Scholar] [CrossRef]
- Cavanillas, J.M.; Edward, C.; Wahlster, W. (Eds.) New Horizons for a Data-Driven Economy, Springer; Cham, Switzerland, 2005. [CrossRef]
- Van Eck, N.J.; Waltman, L. Software survey: VOSviewer, a computer program for bibliometric mapping. Scientometrics 2010, 84, 523–538. [Google Scholar] [CrossRef] [PubMed]
- Lapierre, N.; Neubauer, N.; Miguel-Cruz, A.; Rincon, A.R.; Liu, L.; Rousseau, J. The state of knowledge on technologies and their use for fall detection: A scoping review. Int. J. Med. Inform. 2018, 111, 58–71. [Google Scholar] [CrossRef] [PubMed]
- Liberati, A.; Altman, D.G.; Tetzlaff, J.; Mulrow, C.; Gøtzsche, P.C.; Ioannidis, J.P.A.; Clarke, M.; Devereaux, P.J.; Kleijnen, J.; Moher, D. The PRISMA statement for reporting systematic reviews and meta-analyses of studies that evaluate health care interventions: Explanation and elaboration. PLoS Med. 2009, 6, e1000100. [Google Scholar] [CrossRef] [PubMed]
- Tourian, M.J.; Elmi, O.; Shafaghi, Y.; Behnia, S.; Saemian, P.; Schlesinger, R.; Sneeuw, N. HydroSat: Geometric quantities of the global water cycle from geodetic satellites. Earth Syst. Sci. Data 2022, 14, 2463–2486. [Google Scholar] [CrossRef]
- Donlon, C.; Berruti, B.; Buongiorno, A.; Ferreira, M.-H.; Féménias, P.; Frerick, J.; Goryl, P.; Klein, U.; Laur, H.; Mavrocordatos, C.; et al. The Global Monitoring for Environment and Security (GMES) Sentinel-3 mission. Remote Sens. Environ. 2012, 120, 37–57. [Google Scholar] [CrossRef]
- Le Gac, S.; Boy, F.; Blumstein, D.; Lasson, L.; Picot, N. Benefits of the Open-Loop Tracking Command (OLTC): Extending conventional nadir altimetry to inland waters monitoring. Adv. Space Res. 2021, 68, 843–852. [Google Scholar] [CrossRef]
- Nielsen, K.; Stenseng, L.; Andersen, O.B.; Knudsen, P. The Performance and Potentials of the CryoSat-2 SAR and SARIn Modes for Lake Level Estimation. Water 2017, 9, 374. [Google Scholar] [CrossRef]
- Normandin, C.; Frappart, F.; Diepkilé, A.T.; Marieu, V.; Mougin, E.; Blarel, F.; Lubac, B.; Braquet, N.; Ba, A. Evolution of the Performances of Radar Altimetry Missions from ERS-2 to Sentinel-3A over the Inner Niger Delta. Remote Sens. 2018, 10, 833. [Google Scholar] [CrossRef]
- Thakur, P.K.; Garg, V.; Kalura, P.; Agrawal, B.; Sharma, V.; Mohapatra, M.; Kalia, M.; Aggarwal, S.P.; Calmant, S.; Ghosh, S.; et al. Water level status of Indian reservoirs: A synoptic view from altimeter observations. Adv. Space Res. 2021, 68, 619–640. [Google Scholar] [CrossRef]
- Raney, R. The delay/Doppler radar altimeter. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1578–1588. [Google Scholar] [CrossRef]
- Wingham, D.; Francis, C.; Baker, S.; Bouzinac, C.; Brockley, D.; Cullen, R.; de Chateau-Thierry, P.; Laxon, S.; Mallow, U.; Mavrocordatos, C.; et al. CryoSat: A mission to determine the fluctuations in Earth’s land and marine ice fields. Adv. Space Res. 2006, 37, 841–871. [Google Scholar] [CrossRef]
- Jiang, L.; Schneider, R.; Andersen, O.B.; Bauer-Gottwein, P. CryoSat-2 Altimetry Applications over Rivers and Lakes. Water 2017, 9, 211. [Google Scholar] [CrossRef]
- Roohi, S.; Sneeuw, N.; Benveniste, J.; Dinardo, S.; Issawy, E.; Zhang, G. Evaluation of CryoSat-2 water level derived from different retracking scenarios over selected inland water bodies. Adv. Space Res. 2021, 68, 947–962. [Google Scholar] [CrossRef]
- Schneider, R.; Tarpanelli, A.; Nielsen, K.; Madsen, H.; Bauer-Gottwein, P. Evaluation of multi-mode CryoSat-2 altimetry data over the Po River against in situ data and a hydrodynamic model. Adv. Water Resour. 2018, 112, 17–26. [Google Scholar] [CrossRef]
- Xue, H.; Liao, J.; Zhao, L. A Modified Empirical Retracker for Lake Level Estimation Using Cryosat-2 SARin Data. Water 2018, 10, 1584. [Google Scholar] [CrossRef]
- Chen, J.; Liao, J. Monitoring lake level changes in China using multi-altimeter data (2016–2019). J. Hydrol. 2020, 590, 125544. [Google Scholar] [CrossRef]
- Chen, P.; An, Z.; Xue, H.; Yao, Y.; Yang, X.; Wang, R.; Wang, Z. INPPTR: An improved retracking algorithm for inland water levels estimation using Cryosat-2 SARin data. J. Hydrol. 2022, 613, 128439. [Google Scholar] [CrossRef]
- Chen, J.; Liao, J.; Wang, C. Improved Lake Level Estimation from Radar Altimeter Using an Automatic Multiscale-Based Peak Detection Retracker. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 1246–1259. [Google Scholar] [CrossRef]
- Moore, P.; Birkinshaw, S.; Ambrózio, A.; Restano, M.; Benveniste, J. CryoSat-2 Full Bit Rate Level 1A processing and validation for inland water applications. Adv. Space Res. 2018, 62, 1497–1515. [Google Scholar] [CrossRef]
- Kleinherenbrink, M.; Naeije, M.; Slobbe, C.; Egido, A.; Smith, W. The performance of CryoSat-2 fully-focussed SAR for inland water-level estimation. Remote Sens. Environ. 2020, 237, 111589. [Google Scholar] [CrossRef]
- Liu, Z.; Yao, Z.; Wang, R. Evaluation and Validation of CryoSat-2-Derived Water Levels Using In Situ Lake Data from China. Remote Sens. 2019, 11, 899. [Google Scholar] [CrossRef]
- An, Z.; Chen, P.; Tang, F.; Yang, X.; Wang, R.; Wang, Z. Evaluating the Performance of Seven Ongoing Satellite Altimetry Missions for Measuring Inland Water Levels of the Great Lakes. Sensors 2022, 22, 9718. [Google Scholar] [CrossRef] [PubMed]
- Bogning, S.; Frappart, F.; Blarel, F.; Niño, F.; Mahé, G.; Bricquet, J.-P.; Seyler, F.; Onguéné, R.; Etamé, J.; Paiz, M.-C.; et al. Monitoring Water Levels and Discharges Using Radar Altimetry in an Ungauged River Basin: The Case of the Ogooué. Remote Sens. 2018, 10, 350. [Google Scholar] [CrossRef]
- Deng, X.; Wang, R.-B.; Peng, F.; Yang, Y.; Mo, N.-M. Retracking Cryosat-2 Data in SARIn and LRM Modes for Plateau Lakes: A Case Study for Tibetan and Dianchi Lakes. Remote Sens. 2021, 13, 1078. [Google Scholar] [CrossRef]
- Perbos, J.; Escudier, P.; Parisot, F.; Zaouche, G.; Vincent, P.; Menard, Y.; Manon, F.; Kunstmann, G.; Royer, D.; Fu, L.-L. Jason-1: Assessment of the System Performances Special Issue: Jason-1 Calibration/Validation. Mar. Geod. 2010, 26, 147–157. [Google Scholar] [CrossRef]
- Yang, Y.; Moore, P.; Li, Z.; Li, F. Lake Level Change From Satellite Altimetry Over Seasonally Ice-Covered Lakes in the Mackenzie River Basin. IEEE Trans. Geosci. Remote Sens. 2020, 59, 8143–8152. [Google Scholar] [CrossRef]
- Shu, S.; Liu, H.; Beck, R.A.; Frappart, F.; Korhonen, J.; Lan, M.; Xu, M.; Yang, B.; Huang, Y. Evaluation of historic and operational satellite radar altimetry missions for constructing consistent long-term lake water level records. Hydrol. Earth Syst. Sci. 2021, 25, 1643–1670. [Google Scholar] [CrossRef]
- Frappart, F.; Blarel, F.; Fayad, I.; Bergé-Nguyen, M.; Crétaux, J.-F.; Shu, S.; Schregenberger, J.; Baghdadi, N. Evaluation of the Performances of Radar and Lidar Altimetry Missions for Water Level Retrievals in Mountainous Environment: The Case of the Swiss Lakes. Remote Sens. 2021, 13, 2196. [Google Scholar] [CrossRef]
- Li, S.; Chen, J.; Xiang, J.; Pan, Y.; Huang, Z.; Wu, Y. Water level changes of Hulun Lake in Inner Mongolia derived from Jason satellite data. J. Vis. Commun. Image Represent. 2018, 58, 565–575. [Google Scholar] [CrossRef]
- Neto, A.R.; Behnia, S.; Tourian, M.J.; da Costa, F.A.; Sneeuw, N. Satellite altimetry over small reservoirs in the Brazilian semiarid region. RBRH 2021, 26, e21. [Google Scholar] [CrossRef]
- Biancamaria, S.; Schaedele, T.; Blumstein, D.; Frappart, F.; Boy, F.; Desjonquères, J.-D.; Pottier, C.; Blarel, F.; Niño, F. Validation of Jason-3 tracking modes over French rivers. Remote Sens. Environ. 2018, 209, 77–89. [Google Scholar] [CrossRef]
- Donlon, C.J.; Cullen, R.; Giulicchi, L.; Vuilleumier, P.; Francis, C.R.; Kuschnerus, M.; Simpson, W.; Bouridah, A.; Caleno, M.; Bertoni, R.; et al. The Copernicus Sentinel-6 mission: Enhanced continuity of satellite sea level measurements from space. Remote Sens. Environ. 2021, 258, 112395. [Google Scholar] [CrossRef]
- Jiang, M.; Xu, K.; Wang, J. Evaluation of Sentinel-6 Altimetry Data over Ocean. Remote Sens. 2022, 15, 12. [Google Scholar] [CrossRef]
- Benveniste, J.; Roca, M.; Levrini, G.; Vincent, P.; Baker, S.; Zanife, O.; Zelli, C.; Bombaci, O. The radar altimetry mission: RA-2, MWR, DORIS and LRR. ESA Bull. 2001, 106, 25101–25108. [Google Scholar]
- Dibarboure, G.; Lamy, A.; Pujol, M.-I.; Jettou, G. The Drifting Phase of SARAL: Securing Stable Ocean Mesoscale Sampling with an Unmaintained Decaying Altitude. Remote Sens. 2018, 10, 1051. [Google Scholar] [CrossRef]
- Verron, J.; Sengenes, P.; Lambin, J.; Noubel, J.; Steunou, N.; Guillot, A.; Picot, N.; Coutin-Faye, S.; Sharma, R.; Gairola, R.M.; et al. The SARAL/AltiKa Altimetry Satellite Mission. Mar. Geod. 2015, 38, 2–21. [Google Scholar] [CrossRef]
- Steunou, N.; Desjonquères, J.D.; Picot, N.; Sengenes, P.; Noubel, J.; Poisson, J.C. AltiKa Altimeter: Instrument Description and In Flight Performance. Mar. Geod. 2015, 38, 22–42. [Google Scholar] [CrossRef]
- Vignudelli, S.; Kostianoy, A.G.; Cipollini, P.; Benveniste, J. Coastal Altimetry; Springer Science and Business Media LLC: Berlin/Heidelberg, Germany, 2011; pp. 3–50. [Google Scholar]
- Barry, R.; Finkelstein, J.; Kilgus, C.; Mooers, C.N.K.; Needham, B.; Crawford, M. Geosat follow-on satellite to supply ocean sciences data. Eos Trans. Am. Geophys. Union 1995, 76, 33–36. [Google Scholar] [CrossRef]
- Yang, L.; Xu, Y.; Lin, M.; Ma, C.; Mertikas, S.P.; Hu, W.; Wang, Z.; Mu, B.; Zhou, X. Monitoring the Performance of HY-2B and Jason-2/3 Sea Surface Height via the China Altimetry Calibration Cooperation Plan. IEEE Trans. Geosci. Remote Sens. 2021, 60, 1002013. [Google Scholar] [CrossRef]
- Guo, H.; Guo, J.; Yang, Z.; Wang, G.; Qi, L.; Lin, M.; Peng, H.; Ji, B. On Satellite-Borne GPS Data Quality and Reduced-Dynamic Precise Orbit Determination of HY-2C: A Case of Orbit Validation with Onboard DORIS Data. Remote Sens. 2021, 13, 4329. [Google Scholar] [CrossRef]
- Schutz, B.E.; Zwally, H.J.; Shuman, C.A.; Hancock, D.; DiMarzio, J.P. Overview of the ICESat Mission. Geophys. Res. Lett. 2005, 32, L21S01. [Google Scholar] [CrossRef]
- Neuenschwander, A.; Guenther, E.; White, J.C.; Duncanson, L.; Montesano, P. Validation of ICESat-2 terrain and canopy heights in boreal forests. Remote Sens. Environ. 2020, 251, 112110. [Google Scholar] [CrossRef]
- Dandabathula, G.; Rao, S.S. Validation of ICESat-2 Surface Water Level Product ATL13 with Near Real Time Gauge Data. Hydrology 2020, 8, 19. [Google Scholar] [CrossRef]
- Xu, N.; Zheng, H.; Ma, Y.; Yang, J.; Liu, X.; Wang, X. Global Estimation and Assessment of Monthly Lake/Reservoir Water Level Changes Using ICESat-2 ATL13 Products. Remote Sens. 2021, 13, 2744. [Google Scholar] [CrossRef]
- Narin, O.G.; Abdikan, S. Multi-temporal analysis of inland water level change using ICESat-2 ATL-13 data in lakes and dams. Environ. Sci. Pollut. Res. 2022, 30, 15364–15376. [Google Scholar] [CrossRef] [PubMed]
- Guo, X.; Jin, S.; Zhang, Z. Evaluation of Water Level Estimation in the Upper Yangtze River from ICESat-2 Data. In Proceedings of the 2021 Photonics & Electromagnetics Research Symposium (PIERS), Hangzhou, China, 21–25 November 2021; Volume 2021-Novem, pp. 2260–2264. [Google Scholar] [CrossRef]
- Han, W.; Huang, C.; Gu, J.; Hou, J.; Zhang, Y.; Wang, W. Water Level Change of Qinghai Lake from ICESat and ICESat-2 Laser Altimetry. Remote Sens. 2022, 14, 6212. [Google Scholar] [CrossRef]
- Lao, J.; Wang, C.; Nie, S.; Xi, X.; Wang, J. Monitoring and Analysis of Water Level Changes in Mekong River from ICESat-2 Spaceborne Laser Altimetry. Water 2022, 14, 1613. [Google Scholar] [CrossRef]
- Xiang, J.; Li, H.; Zhao, J.; Cai, X.; Li, P. Inland water level measurement from spaceborne laser altimetry: Validation and comparison of three missions over the Great Lakes and lower Mississippi River. J. Hydrol. 2021, 597, 126312. [Google Scholar] [CrossRef]
- Dubayah, R.; Blair, J.B.; Goetz, S.; Fatoyinbo, L.; Hansen, M.; Healey, S.; Hofton, M.; Hurtt, G.; Kellner, J.; Luthcke, S.; et al. The Global Ecosystem Dynamics Investigation: High-resolution laser ranging of the Earth’s forests and topography. Sci. Remote Sens. 2020, 1, 100002. [Google Scholar] [CrossRef]
- Zhang, Z.; Bo, Y.; Jin, S.; Chen, G.; Dong, Z. Dynamic water level changes in Qinghai Lake from integrating refined ICESat-2 and GEDI altimetry data (2018–2021). J. Hydrol. 2022, 617, 129007. [Google Scholar] [CrossRef]
- Zhang, Z.; Chen, G.; Bo, Y.; Guo, X.; Bao, J. Performance evaluation of combining ICESat-2 and GEDI laser altimetry missions for inland lake level retrievals. Geosci. Lett. 2022, 9, 35. [Google Scholar] [CrossRef]
- Fayad, I.; Baghdadi, N.; Frappart, F. Comparative Analysis of GEDI’s Elevation Accuracy from the First and Second Data Product Releases over Inland Waterbodies. Remote Sens. 2022, 14, 340. [Google Scholar] [CrossRef]
- Xu, N.; Ma, Y.; Wei, Z.; Huang, C.; Li, G.; Zheng, H.; Wang, X.H. Satellite observed recent rising water levels of global lakes and reservoirs. Environ. Res. Lett. 2022, 17, 074013. [Google Scholar] [CrossRef]
- Fok, H.S.; He, Q. Water Level Reconstruction Based on Satellite Gravimetry in the Yangtze River Basin. ISPRS Int. J. Geoinf. 2018, 7, 286. [Google Scholar] [CrossRef]
- Li, W.; Cardellach, E.; Fabra, F.; Ribó, S.; Rius, A. Lake Level and Surface Topography Measured with Spaceborne GNSS-Reflectometry From CYGNSS Mission: Example for the Lake Qinghai. Geophys. Res. Lett. 2018, 45, 13332–13341. [Google Scholar] [CrossRef]
- Rodriguez-Alvarez, N.; Munoz-Martin, J.F.; Morris, M. Latest Advances in the Global Navigation Satellite System—Reflectometry (GNSS-R) Field. Remote Sens. 2023, 15, 2157. [Google Scholar] [CrossRef]
- Ruf, C.S.; Chew, C.; Lang, T.; Morris, M.G.; Nave, K.; Ridley, A.; Balasubramaniam, R. A New Paradigm in Earth Environmental Monitoring with the CYGNSS Small Satellite Constellation. Sci. Rep. 2018, 8, 8782. [Google Scholar] [CrossRef]
- Holden, L.D.; Larson, K.M. Ten years of Lake Taupō surface height estimates using the GNSS interferometric reflectometry. J. Geod. 2021, 95, 74. [Google Scholar] [CrossRef]
- Park, E.; Merino, E.; Lewis, Q.W.; Lindsey, E.O.; Yang, X. A Pathway to the Automated Global Assessment of Water Level in Reservoirs with Synthetic Aperture Radar (SAR). Remote Sens. 2020, 12, 1353. [Google Scholar] [CrossRef]
- Liao, J.; Xue, H. Estimation of lake level using Tiangong-2 InIRA data. In Proceedings of the 2019 Tiangong-2 Remote Sensing Application Conference; Springer: Singapore, 2019; Volume 541, pp. 333–343. [Google Scholar] [CrossRef]
- Wahr, J.; Swenson, S.; Zlotnicki, V.; Velicogna, I. Time-variable gravity from GRACE: First results. Geophys. Res. Lett. 2004, 31, L11501. [Google Scholar] [CrossRef]
- Tapley, B.D.; Bettadpur, S.; Watkins, M.; Reigber, C. The gravity recovery and climate experiment: Mission overview and early results. Geophys. Res. Lett. 2004, 31, L09607. [Google Scholar] [CrossRef]
- Pham, H.T.; Marshall, L.; Johnson, F.; Sharma, A. Deriving daily water levels from satellite altimetry and land surface temperature for sparsely gauged catchments: A case study for the Mekong River. Remote Sens. Environ. 2018, 212, 31–46. [Google Scholar] [CrossRef]
- Cretaux, J.; Berge-Nguyen, M.; Sensing, S.C. Absolute Calibration or Validation of the Altimeters on the Sentinel-3A and the Jason-3 over Lake Issykkul (Kyrgyzstan). Remote Sens. 2018, 10, 1679. [Google Scholar] [CrossRef]
- Birkett, C.M. Contribution of the TOPEX NASA Radar Altimeter to the global monitoring of large rivers and wetlands. Water Resour. Res. 1998, 34, 1223–1239. [Google Scholar] [CrossRef]
- Wingham, D.J.; Rapley, C.G.; Griffiths, H. New techniques in satellite altimeter tracking systems. In Proceedings of the IGARSS, Zürich, Switzerland, 8–11 September 1986. [Google Scholar]
- Davis, C.H. Growth of the Greenland ice sheet: A performance assessment of altimeter retracking algorithms. IEEE Trans. Geosci. Remote Sens. 1995, 33, 1108–1116. [Google Scholar] [CrossRef]
- Jain, M.; Andersen, O.B.; Dall, J.; Stenseng, L. Sea surface height determination in the Arctic using Cryosat-2 SAR data from primary peak empirical retrackers. Adv. Space Res. 2015, 55, 40–50. [Google Scholar] [CrossRef]
- Roohi, S.; Amini, A.; Battles, D. Lake Monitoring from a Combination of Multi Copernicus Missions: Sentinel-1 A and B and Sentinel-3A. J. Hydrogeol. Hydrol. Eng. 2019, 8, 3. [Google Scholar]
- Mostafavi, M.; Delpeche-Ellmann, N.; Ellmann, A. Accurate Sea Surface heights from Sentinel-3A and Jason-3 retrackers by incorporating High-Resolution Marine Geoid and Hydrodynamic Models. J. Géod. Sci. 2021, 11, 58–74. [Google Scholar] [CrossRef]
- Ray, C.; Martin-Puig, C.; Clarizia, M.P.; Ruffini, G.; Dinardo, S.; Gommenginger, C.; Benveniste, J. SAR Altimeter Backscattered Waveform Model. IEEE Trans. Geosci. Remote Sens. 2015, 53, 911–919. [Google Scholar] [CrossRef]
- Passaro, M.; Rose, S.K.; Andersen, O.B.; Boergens, E.; Calafat, F.M.; Dettmering, D.; Benveniste, J. ALES+: Adapting a homogenous ocean retracker for satellite altimetry to sea ice leads, coastal and inland waters. Remote Sens. Environ. 2018, 211, 456–471. [Google Scholar] [CrossRef]
- Peng, F.; Deng, X. Validation of Sentinel-3A SAR mode sea level anomalies around the Australian coastal region. Remote Sens. Environ. 2020, 237, 111548. [Google Scholar] [CrossRef]
- Peng, F.; Deng, X. A New Retracking Technique for Brown Peaky Altimetric Waveforms. Mar. Geod. 2017, 41, 99–125. [Google Scholar] [CrossRef]
- Jiang, L.; Nielsen, K.; Dinardo, S.; Andersen, O.B.; Bauer-Gottwein, P. Evaluation of Sentinel-3 SRAL SAR altimetry over Chinese rivers. Remote Sens. Environ. 2020, 237, 111546. [Google Scholar] [CrossRef]
- Dinardo, S.; Fenoglio-Marc, L.; Buchhaupt, C.; Becker, M.; Scharroo, R.; Fernandes, M.J.; Benveniste, J. Coastal SAR and PLRM altimetry in German Bight and West Baltic Sea. Adv. Space Res. 2018, 62, 1371–1404. [Google Scholar] [CrossRef]
- Gao, Q.; Makhoul, E.; Escorihuela, M.J.; Zribi, M.; Seguí, P.Q.; García, P.; Roca, M. Analysis of Retrackers’ Performances and Water Level Retrieval over the Ebro River Basin Using Sentinel-3. Remote Sens. 2019, 11, 718. [Google Scholar] [CrossRef]
- Makhoul, E.; Roca, M.; Ray, C.; Escolà, R.; Garcia-Mondéjar, A. Evaluation of the precision of different Delay-Doppler Processor (DDP) algorithms using CryoSat-2 data over open ocean. Adv. Space Res. 2018, 62, 1464–1478. [Google Scholar] [CrossRef]
- Shu, S.; Liu, H.; Beck, R.A.; Frappart, F.; Korhonen, J.; Xu, M.; Yang, B.; Hinkel, K.M.; Huang, Y.; Yu, B. Analysis of Sentinel-3 SAR altimetry waveform retracking algorithms for deriving temporally consistent water levels over ice-covered lakes. Remote Sens. Environ. 2020, 239, 111643. [Google Scholar] [CrossRef]
- Dinardo, S.; Lucas, B.; Benveniste, J. Sentinel-3 STM SAR ocean retracking algorithm and SAMOSA model. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; pp. 5320–5323. [Google Scholar]
- Boy, F.; Cretaux, J.-F.; Boussaroque, M.; Tison, C. Improving Sentinel-3 SAR Mode Processing Over Lake Using Numerical Simulations. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5220518. [Google Scholar] [CrossRef]
- Boy, F.; Crétaux, J.-F.; Boussaroque, M.; Tison, C. Estimation of Lake Heights from Sentinel-3 Sar Mode Through Numerical Simulations. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11–16 July 2021; pp. 6128–6131. [Google Scholar] [CrossRef]
- Nielsen, K.; Andersen, O.B.; Ranndal, H. Validation of Sentinel-3A Based Lake Level over US and Canada. Remote Sens. 2020, 12, 2835. [Google Scholar] [CrossRef]
- Zaidi, A.Z.; Vignudelli, S.; Khero, Z.; Ghauri, B.M.; Muzaffer, R.; Naeem, B.; Panhwar, V.; Zafar, S.; Haque, S.U. Indus river water level monitoring using satellite radar altimetry. Adv. Space Res. 2020, 68, 641–651. [Google Scholar] [CrossRef]
- Diepkilé, A.T.; Egon, F.; Blarel, F.; Mougin, E.; Frappart, F. Validation of the altimetry-based water levels from Sentinel-3A and B in the Inner Niger Delta. Proc. Int. Assoc. Hydrol. Sci. 2021, 384, 31–35. [Google Scholar] [CrossRef]
- Kittel, C.M.M.; Jiang, L.; Tøttrup, C.; Bauer-Gottwein, P. Sentinel-3 radar altimetry for river monitoring—A catchment-scale evaluation of satellite water surface elevation from Sentinel-3A and Sentinel-3B. Hydrol. Earth Syst. Sci. 2021, 25, 333–357. [Google Scholar] [CrossRef]
- Halicki, M.; Niedzielski, T. The accuracy of the Sentinel-3A altimetry over Polish rivers. J. Hydrol. 2022, 606, 127355. [Google Scholar] [CrossRef]
- Ray, C.; Roca, M.; Martin-Puig, C.; Escola, R.; Garcia, A. Amplitude and Dilation Compensation of the SAR Altimeter Backscattered Power. IEEE Geosci. Remote Sens. Lett. 2015, 12, 2473–2476. [Google Scholar] [CrossRef]
- Nino, F.; Coggiola, C.; Blumstein, D.; Lasson, L.; Calmant, S. Monitoring of Inland Water Levels by Satellite Altimetry and Deep Learning. IEEE Trans. Geosci. Remote Sens. 2022, 60, 4205814. [Google Scholar] [CrossRef]
- Crétaux, J.-F.; Birkett, C. Lake studies from satellite radar altimetry. Comptes Rendus Geosci. 2006, 338, 1098–1112. [Google Scholar] [CrossRef]
- Kern, M.; Cullen, R.; Berruti, B.; Bouffard, J.; Casal, T.; Drinkwater, M.R.; Gabriele, A.; Lecuyot, A.; Ludwig, M.; Midthassel, R.; et al. The Copernicus Polar Ice and Snow Topography Altimeter (CRISTAL) high-priority candidate mission. Cryosphere 2020, 14, 2235–2251. [Google Scholar] [CrossRef]
- Frasson, R.P.d.M.; Schumann, G.J.; Kettner, A.J.; Brakenridge, G.R.; Krajewski, W.F. Will the Surface Water and Ocean Topography (SWOT) Satellite Mission Observe Floods? Geophys. Res. Lett. 2019, 46, 10435–10445. [Google Scholar] [CrossRef]
- Wang, J.; Fu, L.-L.; Qiu, B.; Menemenlis, D.; Farrar, J.T.; Chao, Y.; Thompson, A.F.; Flexas, M.M.; Farrar, T. An Observing System Simulation Experiment for the Calibration and Validation of the Surface Water Ocean Topography Sea Surface Height Measurement Using In Situ Platforms. J. Atmos. Ocean. Technol. 2018, 35, 281–297. [Google Scholar] [CrossRef]
- Fablet, R.; Verron, J.; Mourre, B.; Chapron, B.; Pascual, A. Improving Mesoscale Altimetric Data From a Multitracer Convolutional Processing of Standard Satellite-Derived Products. IEEE Trans. Geosci. Remote Sens. 2018, 56, 2518–2525. [Google Scholar] [CrossRef]
- Blumstein, D.; Biancamaria, S.; Amiot, T.; Guérin, A.; Le Gac, S.; Maisongrande, P.; Cherchali, S.; Picot, N.; Coutin-Faye, S.; Rey, L.; et al. SMASH: A Mission to Better Monitor Inland Waters and Esturaies. 2021. Available online: https://www.hydrospace2021.org/ (accessed on 15 September 2023).
- Giuliani, G.; Egger, E.; Italiano, J.; Poussin, C.; Richard, J.-P.; Chatenoux, B. Essential Variables for Environmental Monitoring: What Are the Possible Contributions of Earth Observation Data Cubes? Data 2020, 5, 100. [Google Scholar] [CrossRef]
- Bojinski, S.; Verstraete, M.; Peterson, T.C.; Richter, C.; Simmons, A.; Zemp, M. The Concept of Essential Climate Variables in Support of Climate Research, Applications, and Policy. Bull. Am. Meteorol. Soc. 2014, 95, 1431–1443. [Google Scholar] [CrossRef]



| Question Components | Search Keywords |
|---|---|
| Inland Water Level Satellite | (“Inland Water Level” OR “Inland Water Level Monitoring” OR “Inland Water Monitoring” OR “Monitoring Inland Water”) AND (Satellite)–“Monitoring Inland Water Quality”–“Water Quality Monitoring” |
| Total Number of Publications | Relevant Publications Classified as Relevant | Non-Relevant Publications Classified as Relevant | Sensitivity Score | |
|---|---|---|---|---|
| Relevant publications classified as Relevant | 69 | 57 | 12 | 82.6% |
| Publication | Satellite Mission | Data | Validation | Accuracy Metrics |
|---|---|---|---|---|
| [94] | ICESat-2 | ATL13 products–version V003 | In situ gauge and ATL08 products | RMSE = 0.08 m, r = 0.999 (RMSE = 0.28 m, r = 0.999 for ATL08 product) |
| [104] | ICESat, ICESat-2 | GLAH14–V034 (ICESat), ATL13 products V005 (ICESat-2) | In situ gauge and G-REALM and HYDROWEB | For In situ: RMSE = 0.06 m/yr., MAPE = 15.58%, r = 0.98. For databases: RMSE = 0.06 m/yr., MAPE = 22.79%, r = 0.92 |
| [77] | ICESat-2, GEDI | ATL13 (ICESat-2), L1B and L2A (GEDI) | In situ gauge | ICESat-2: RMSE ≤ 0.06 m, R ≥ 0.95, bias (0.42 ± 0.03) m, GEDI: RMSE: 0.16–0.51 m, R > 0.75, bias std: 0.08–0.3 m |
| [97] | ICESat, ICESat-2 | L2-GLAH14 (ICESat), ATL13 products V005 (ICESat-2) | In situ gauge | ICESat: R = 0.85, RMSE = 0.15 m, MAE = 0.1 m, MAD: 0.05–0.25 m, σ: 0.078–0.37 m and for ICESat-2: R = 0.69, RMSE = 0.05 m, MAE = 0.06 m, MAD = 0.03–0.05 m, σ = 0.04–0.07 m |
| [95] | ICESat-2 | ATL13 products | In situ gauge | R2 = 0.28–0.99, RMSE = 0.4–1 m |
| [102] | GEDI, ICESat-2 | ATL13–V004 (ICESat-2), L2A (GEDI) | In situ gauge | ICESat-2: R = 0.96–0.99, MAE = 0.03–0.1, RMSE = 0.04–0.13 m and GEDI: R = 0.56–0.95, MAE = 0.31–0.38, RMSE = 0.35–0.46 m |
| [99] | ICESat, ICESat-2, GEDI | GLA14, ATL13–V003, L2B | In situ gauge | ICESat-2: RMSE = 0.06–0.12 m, biases = −0.08 ± 0.07 m, ICESat: RMSE = 0.10–0.25 m, biases = −0.18 ± 0.16 m, GEDI: RMSE = 0.28–0.40 m, biases = −0.24 ± 0.24 m |
| [71] | ICESat-2 | ATL13 | In situ gauge | RMSE = 0.05–0.14 m, R = 0.74–0.95 |
| [98] | ICESat-2 | ATL13 | In situ gauge | RMSE = 0.24 m, bias = −0.11 m, MSD = 0.04 |
| [101] | ICESat-2, GEDI | ATL13–V004 (ICESat-2), L2A (GEDI) | In situ gauge, DAHITI, and Hydroweb | ICESat-2: std = 0.03 m, GEDI: std = 0.11 m, Combining two missions: R > 0.8 |
| [96] | ICESat-2 | ATL13–V003 | In situ gauge | RMSE = 0.32 m, R > 0.99 |
| [103] | GEDI | L1B and L2A | In situ gauge | ubRMSE = 0.27–0.43 m, R = 0.34–0.66, bias = 0.35–0.54 m |
| Publication | Satellite Mission | Data | Retracker | Validation Data | Accuracy Metrics |
|---|---|---|---|---|---|
| [64] | CryoSat-2 (InSAR) | Baseline C Level-1b (L1b) and Level-2 (L2) | ImpMWaPP | Retrackers (NPPTR [0.5], NPPTR [0.8], NPPOR, MwaPP, ESAL2) and in-situ | RMSEs = 0.085 m–0.573 m, lowest mean RMSE = 0.175 m and lowest Std = 0.23 m obtained by ImpMWaPP |
| [75] | T/P, Jason-1/-2/-3 | SGDR versions-T/P: MGDR-B, J-1: E, J-2: D, J-3:D | Modified algorithm to use the first subwaveform | Retrackers (Ice, MLE3, MLE4, T, ST, MST) and in-situ | Jason-2: Std = 0.06 m with new retracker. Std = 0.08 m–0.11 m with Ice. T/P: Std = 0.07 m |
| [120] | Sentinel-3A | L1b and L2 | A new approach to selecting an optimal peak of a waveform | In-situ gauge, Level-2 data, and retrackers (Ocean, OCOG, Ice-sheet, Sea-ice) | RMSE = 0.07 m and R = 87% using optimal sub-waveform, RMSE = 0.08 m and R = 85% using Mean-all sub-waveform. RMSE= 0.14 m and R = 65% using L2 |
| [67] | CryoSat-2 (InSAR), Sentinel-3, Jason-2/3 | - | AMPDR (AMPDTR + AMPDOR) | In-situ gauge and 7 Retrackers (NPPTR [0.5], NPPTR [0.8], NPPOR, MWaPP, WWMFW/ESA L2, SAMOSA, ALES+) | mean-RMSEs = 0.149, 0.139, and 0.181 m and Std = 0.16, 0.16, and 0.24 m obtained by Cryosat-2, Sentinel-3, and Jason-2/3 respectively. |
| [73] | CryoSat-2 (LRM, InSAR) | Baseline-C L2 for LRM and L1B for InSAR | APD-PPT | Jason-2 LRM, In-situ gauge, and Retrackers (WWMFW, PPT, OCOG, MBP, ALES) | Smallest mean-Stds (0.186 m and 0.303 m). R > 0.7 for Jason-2 and Cryosat-2 using APD-PPT. MAD = 0.23–0.43 m |
| [66] | CryoSat-2 (InSAR) | L1b | INPPTR | Retrackers (NPPTR, NPPOR, MWaPP) and In-situ gauge data | RMSE = 0.17–0.58 m, std = 0.78–0.52 m |
| [126] | Sentinel-3A | L1b | MWaPP+ | Retrackers (OCOG, SAMOSA+, PPCOG, MWaPP) and In-situ gauge data | RMSE = 0.13–2.08 m |
| [65] | CryoSat-2 (InSAR), Jason-2/-3, Sentinel-3A | InSAR L1b, S-GDR, LAN L2 | another modified MWaPP+ | Retrackers (OCOG, NPPTR, NPPTR [0.5], NPPTR [0.8], NPPOR, MwaPP), In-situ gauge and Hydroweb product | mean-RMSEs = 0.08–0.16 m, std = 0.25–0.30 m, R > 0.79, |
| [128] | Sentinel-3 | L1b | New waveform portion selection method | L2 Ocean retracked data, In-situ gauge, Retrackers (Threshold, OCOG, two-step SAR physical-based) | OCOG: RMSEs = 0.29–1.39 m and ubRMSE = 0.28–1.38 m, Threshold: RMSEs= 0.30–1.39 m and ubRMSE = 0.16–1.38 m, Physical: RMSEs= 0.18–1.39 m and ubRMSE = 0.16–1.39 m, |
| [130] | Sentinel-3 | L2 | Bimodal correction algorithm | In-situ gauge, Retrackers (Ice-sheet, SAMOSA-3, OCOG, Sea-Ice) | r = 0.93, RMSE = 0.05 m instead of r = 0.13, RMSE = 0.6 m using SAMOSA-3 retracker |
| [132] | Sentinel-3 | L1b | Novel retracker based on numerical simulations | In-situ gauge data, OCOG | ubRMSE = 0.03–0.07 m and biased-RMSE = 0.10–0.13 m |
| Publication | Satellite Mission | Data | Retracker | Validation Data | Accuracy Metrics |
|---|---|---|---|---|---|
| [134] | Sentinel-3 | Level-2 (L-2) | Ocean, OCOG | In-situ gauge | Ocean: median-RMSE = 0.25–0.30 m, R = 0.86 and for OCOG: median-RMSE = 0.19–0.24 m, R = 0.93. Percentage of outliers is 11–16%. |
| [135] | Sentinel-3 | Acquired by G-POD | OCOG | In-situ gauge | R = 0.937–0.941, RMSD = 0.43–0.45 m, ubRMSE = 0.37–0.42 m |
| [136] | Sentinel-3 | Acquired by CTOH | OCOG | In-situ gauge | R> 0.79, RMSE = 0.15–1.39 m |
| [137] | Sentinel-3 | L-1b, L-2 | SAMOSA+ (G-POD), OCOG (SciHub) | In-situ gauge | RMSD = 0.03–0.31 m, WRMSD = 4.9%–18.9% of the in-situ std, and R > 0.98 |
| [138] | Sentinel-3 | Altimetric data acquired by Hydroweb | OCOG | In-situ gauge | RMSE = 0.12–0.44 m, mean-RMSE = 0.22 m, NSE = 0.40–0.98, mean-NSE = 0.84 |
| [57] | ERS-2, ENVISAT, SARAL, Jason-1/-2/-3, Sentinel-3 | GDRs data: E for Jason-1, D for Jason-2/-3, ERS-2 (CTOH), ENVISAT (V2.1), SARAL (T), Sen-3 (ESA IPF 06.07 land) | OCOG | In-situ gauge | R > 0.8 in 80% of cases and RMSE < 0.4 m in 48% of cases. |
| [76] | GeoSat, ERS-1/-2, T/P, GEOSatFO, Jason-1/-2/-3, ENVISAT, SARAL, Sen-3 | ERS-1 (REAPER), T/P (GDR-M), ERS-2 (CTOH), GFO (GDR), J-1 (GDR-E), ENVISAT (V3), SARAL (GDR-T), J-2/-3 (GDR-D), Sen-3 (Baseline 2.45) | See Table 2 | In situ gauge | Sen-3 OCOG: RMSE = 0.06 m, r = 0.93, data loss rate = 2.32% (best performance). GeoSat: data loss rate = 65.42%. ERS-1: mean-RMSE = 0.35 m. Jason-2 ice: r = 0.93, RMSE = 0.08 m |
| [77] | Jason-1/-2/-3, ERS-2, ENVISAT, SARAL, Sen-3 | GDRs data: E for Jason-1, D for Jason-2/-3, ERS-2 (CTOH), ENVISAT (V2.1), SARAL (T), Sen-3 (ESA IPF 06.07 land) | OCOG | In situ gauge | Sen-3: RMSE< 0.07 m, R > 0.85, bias = (−0.17 ± 0.04) m. ERS-2: RMSE = 0.28–0.41 m, R = 0.45–0.65. ENVISAT: RMSE = 0.52 m. SARAL: RMSE ≤ 0.08 m, R> 0.8. |
| [79] | Envisat, SARAL, Sen-3, Jason-2/-3 | Envisat (GDR-V3), SARAL(GDR-T), J-2 (PISTACH), J-3 (GDR-D), Sen-3 (O_NT_003) | OCOG | In situ gauge | Sen-3B: max-RMSE = 0.21 m, Sen-3 A: RMSE = 0.14–1.01 m, Envisat: RMSE = 0.28–0.40 m, SARAL: RMSE = 0.17–0.40 m, J-2: RMSE = 0.21–0.86 m, J-3: RMSE = 0.14–0.84 m |
| [115] | Sentinel-3, Jason-3 | Jason-3: GDR-D, Sent-3: ESA Land_IPF_06.07_V1.5 | Jason-3: (Ocean, OCOG) Sen-3: (OCOG, SAMOSA) | In situ gauge | Absolute biases: Jason-3: −0.03 ± 0.04 m (Ocean), 0.2± 0.03 m (OCOG) and Sen-3: −0.01± 0.02 m (SAMOSA), 0.29± 0.02 m (OCOG). Lowest RMS = 0.02 m for Sen-3 with OCOG. RMS of J-3 > 0.03 m. |
| [71] | CryoSat-2, HY-2B, HY-2C, Jason-3, Sen-3, Sen-6 | CryoSat-2: LRM_L2, HY-2B/-2C: SDR_L2, J-3: GDR_L2, Sen3A: SAR_NTC_L2, Sen-6: LR_L2 | Jason-3, Sen-3A, CryoSat-2, Sen-6 (Ocean) | In situ gauge | RMSEs: CryoSat-2 (0.05–0.30 m), HY-2B (0.04–0.23 m), HY-2C (0.07–0.26 m), J-3 (0.04–0.14 m), Sen-3A (0.04–0.13 m), Sen-6 (0.04–0.14 m) and R: CryoSat-2 (−0.70–0.94), HY-2B (0.34–0.97), HY-2C (0.83–0.92), J-3(0.69–0.99), Sen-3A (0.18–0.99), Sen-6 (0.87–0.98) |
| [72] | Jason-2/-3, ERS-2, ENVISAT, CryoSat-2, SARAL, Sen-3 | Jason-2/-3 (GDR-D), Envisat (GDR v2.1), SARAL (GDR-T), CryoSat-2 (GDR-C), ERS-2 (CTOH), Sen-3 (ESA IPF 06.07 land) | OCOG | In situ gauge | Sen-3: R > 0.94 and RMSE < 0.4 m, CryoSat-2: R = 0.98 and RMSE = 0.25 m, Envisat: R > 0.9 and RMSE < 0.5 m, SARAL: R > 0.95 and RMSE < 0.4 m |
| [58] | ERS-2, ENVISAT RA-2, SARAL, Sen-3 | ERS-2: ERS_ALT_2 L2, Envisat RA-2: GDR V3, SARAL: L2, Sen-3: NTC L2 LRM | OCOG | In situ gauge | Sen-3: RMSE = 0.19–0.79 m, ERS-2: RMSE = 0.26–2.77 m, ENVISAT: RMSE = 0.44–4.57 m, SARAL: RMSE = 0.03–1.67 m |
| [68] | CryoSat-2 | Full Bit Rate SAR L-1A | 5 Empirical retrackers, SAMOSA2, OCOG, Threshold | In situ and T/P, Envisat, J-2, SARAL data | RMS: Tonle Sap: 0.4 m for CryoSat-2, 0.4 m for J-2. 0.6 m for CryoSat-2, Mekong: 0.35–0.52 m for Envisat. Amazon: 0.27 m for CryoSat-2, 0.26 m for SARAL. |
| [69] | CryoSat-2 | L-1b, L-2 (FF-SAR) | SAMOSA+ and Threshold | In situ gauge | SAMOSA+: std = 0.05–0.15 m, Precision = 0.03–0.14 m and Threshold retracker: std = 0.04–0.14 m, Precision = 0.04–0.14 m. |
| [62] | CryoSat-2 | L-1b, L-2 (LRM, SAR, InSAR) | OCOG, threshold, b-parameters and SAMOSA3 | In situ and L2 products of Envisat and J-2 | SAR mode: RMS = 0.13–0.15 m, while 0.28–1 m for Envisat. InSAR mode: RMS = 0.16–0.25 cm, while for Envisat: 0.19 and J-2: 0.54 m. LRM mode: RMS = 0.13–0.15 m, while Envisat: 0.17 m |
| [70] | CryoSat-2 | GDR L-2(SAR, LRM) | SAMOSA | In-situ gauge. DAHITI and Hydroweb to validate in-situ | absolute mean difference = 0.09 m, absolute std difference = 0.04 m, mean RMSE = 0.27 m, mean R = 0.84 |
| [63] | CryoSat-2 | L-2, based on 20 Hz level 1b baseline C (LRM, SAR, InSAR) | NPPR | In situ gauge | RMSE = 0.38 m |
| [80] | Jason-2/-3 | GDR-D | OCOG | In situ gauge | RMSE = 0.20–0.30 m, |
| [78] | Jason-1/-2 | GDR-C (Jason-1), GDR-D (Jason-2) | OCOG | Landsat TM/ETM/OLI_TRIS images | RMSE = 0.237 m, R = 0.986 |
| [140] | Jason-3 | - | OCOG (also for validation) | In-situ gauge | R > 0.95, RMSE = 0.26–0.43 m |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kossieris, S.; Tsiakos, V.; Tsimiklis, G.; Amditis, A. Inland Water Level Monitoring from Satellite Observations: A Scoping Review of Current Advances and Future Opportunities. Remote Sens. 2024, 16, 1181. https://doi.org/10.3390/rs16071181
Kossieris S, Tsiakos V, Tsimiklis G, Amditis A. Inland Water Level Monitoring from Satellite Observations: A Scoping Review of Current Advances and Future Opportunities. Remote Sensing. 2024; 16(7):1181. https://doi.org/10.3390/rs16071181
Chicago/Turabian StyleKossieris, Stylianos, Valantis Tsiakos, Georgios Tsimiklis, and Angelos Amditis. 2024. "Inland Water Level Monitoring from Satellite Observations: A Scoping Review of Current Advances and Future Opportunities" Remote Sensing 16, no. 7: 1181. https://doi.org/10.3390/rs16071181
APA StyleKossieris, S., Tsiakos, V., Tsimiklis, G., & Amditis, A. (2024). Inland Water Level Monitoring from Satellite Observations: A Scoping Review of Current Advances and Future Opportunities. Remote Sensing, 16(7), 1181. https://doi.org/10.3390/rs16071181