
Optical Imaging Method of Synthetic-Aperture Radar for Moving Targets


Abstract
1. Introduction
2. Materials and Methods
2.1. Basic Idea
2.2. Search for the Focal Point

2.3. Multi-Target Situation
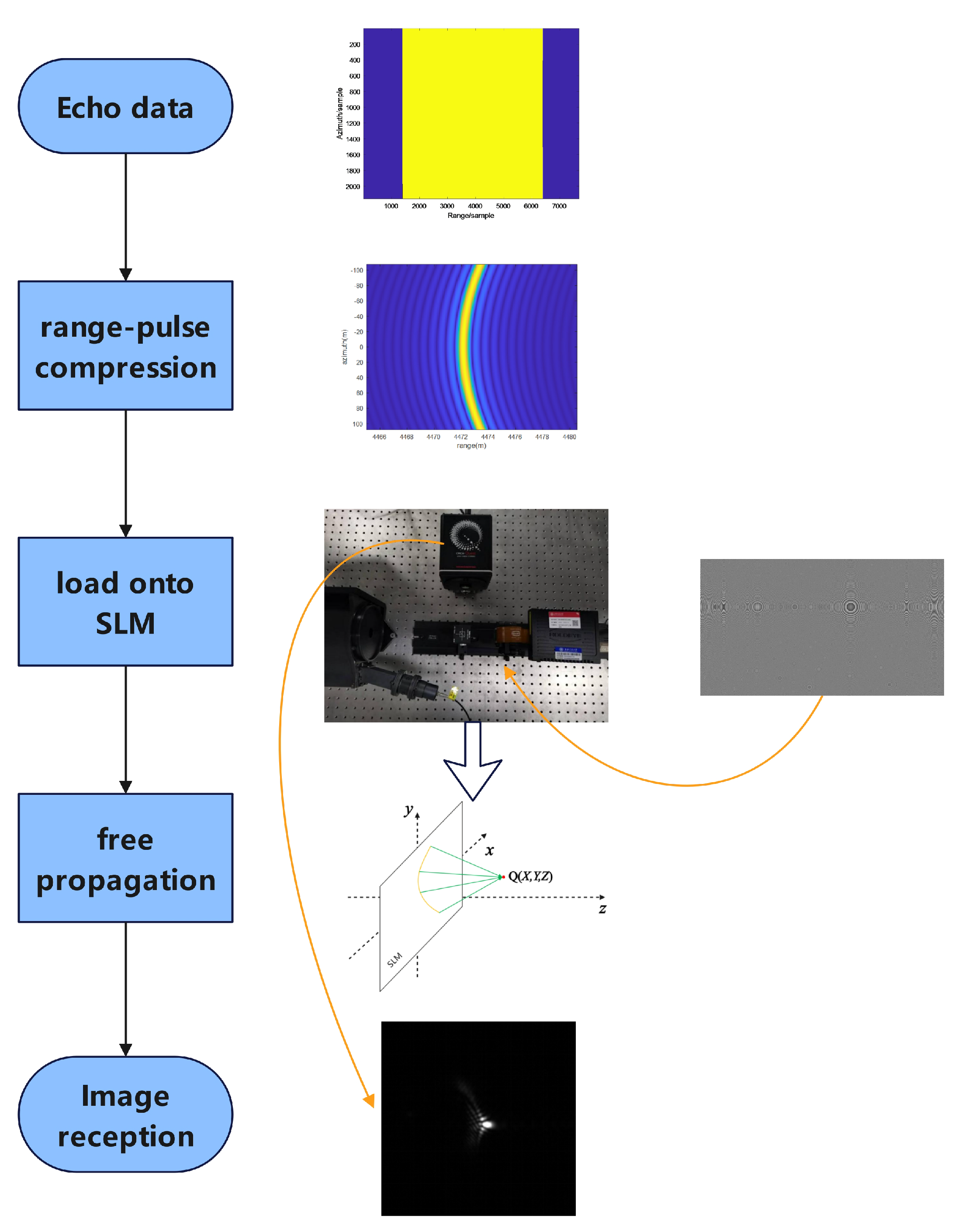
2.4. Method Summary
3. Experiments and Results
3.1. Experiment 1: Validation of Methodology
3.2. Experiment 2: Single-Point Target Focusing
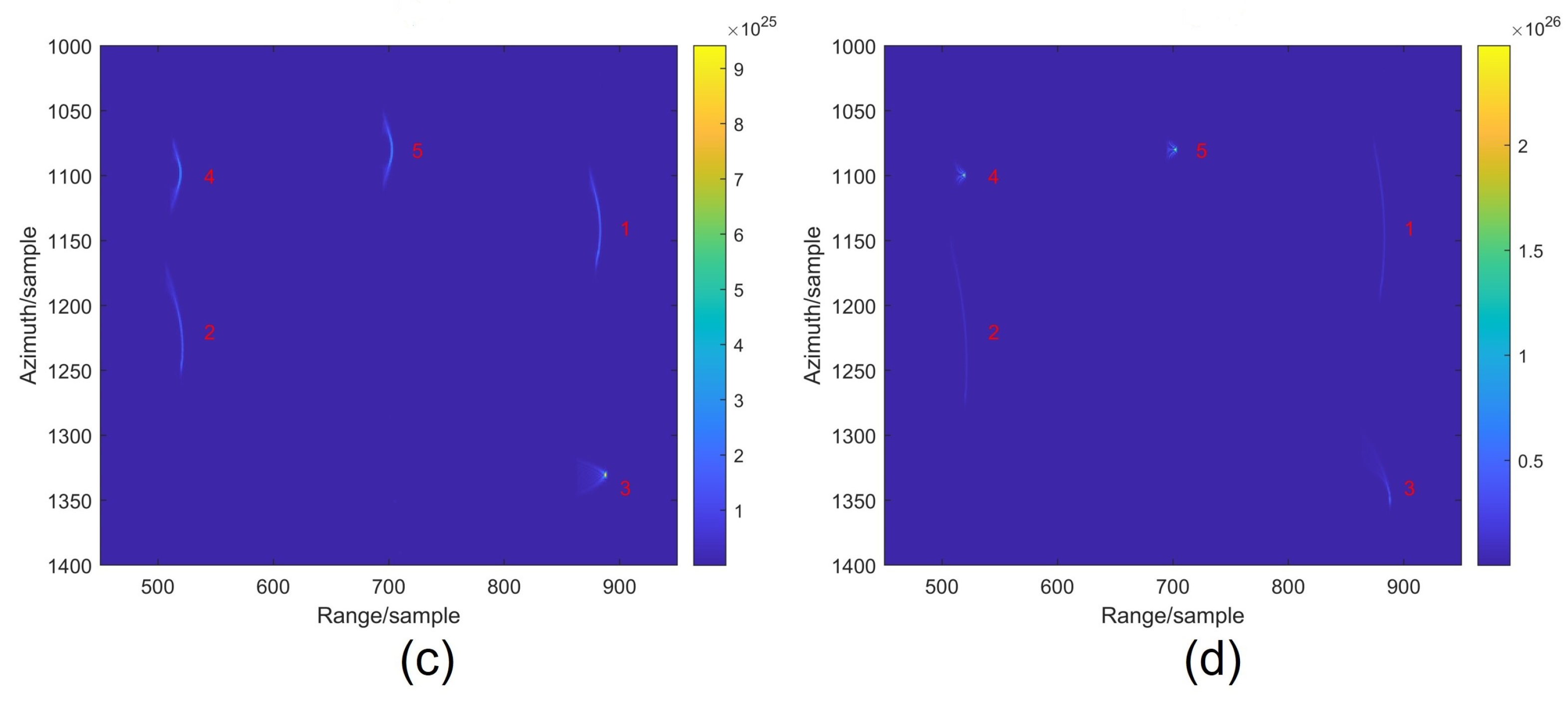
3.3. Experiment 3: Multiple Moving Point Target Focusing
3.4. Experiment 4: Area Target Focusing
3.5. Experiment 5: Focusing with Moving and Static Targets
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| SAR | synthetic-aperture radar |
| NPBS | non-polarizing beam splitter |
| PRI | pulse repetition interval |
| SLM | spatial light modulators |
| APC | antenna phase center |
| PSLR | peak-to-sidelobe ratio |
Appendix A
Appendix B
Appendix C



Appendix D

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Target | (m/s) | (m/s) | Location |
|---|---|---|---|
| 1 | 10 | 0 | (−20,2550,0) |
| 2 | 10 | 1 | (−20,2650,0) |
| 3 | 4 | 4 | (20,2550,0) |
| 4 | 0 | 1 | (20,2650,0) |
| 5 | 0 | 0 | (0,2600,0) |


References
- Lan, H.; Liu, X.; Li, L.; Li, Q.; Tian, N.; Peng, J. Remote Sensing Precursors Analysis for Giant Landslides. Remote Sens. 2022, 14, 4399. [Google Scholar] [CrossRef]
- Pham, T.D.; Yokoya, N.; Bui, D.T.; Yoshino, K.; Friess, D.A. Remote Sensing Approaches for Monitoring Mangrove Species, Structure, and Biomass: Opportunities and Challenges. Remote Sens. 2019, 11, 230. [Google Scholar] [CrossRef]
- Wang, C.; Chang, L.; Wang, X.S.; Zhang, B.; Stein, A. Interferometric Synthetic Aperture Radar Statistical Inference in Deformation Measurement and Geophysical Inversion: A review. IEEE Geosci. Remote Sens. Mag. 2024, 12, 8–35. [Google Scholar] [CrossRef]
- Bovenga, F. Special Issue “Synthetic Aperture Radar (SAR) Techniques and Applications”. Sensors 2020, 20, 1851. [Google Scholar] [CrossRef] [PubMed]
- Xie, T.; Ouyang, R.; Perrie, W.; Zhao, L.; Zhang, X. Proof and Application of Discriminating Ocean Oil Spills and Seawater Based on Polarization Ratio Using Quad-Polarization Synthetic Aperture Radar. Remote Sens. 2023, 15, 1855. [Google Scholar] [CrossRef]
- Amitrano, D.; Di Martino, G.; Guida, R.; Iervolino, P.; Iodice, A.; Papa, M.N.; Riccio, D.; Ruello, G. Earth Environmental Monitoring Using Multi-Temporal Synthetic Aperture Radar: A Critical Review of Selected Applications. Remote Sens. 2021, 13, 604. [Google Scholar] [CrossRef]
- Asiyabi, R.M.; Ghorbanian, A.; Tameh, S.N.; Amani, M.; Jin, S.; Mohammadzadeh, A. Synthetic Aperture Radar (SAR) for Ocean: A Review. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2023, 16, 9106–9138. [Google Scholar] [CrossRef]
- Nunziata, F.; Meng, T.; Buono, A.; Migliaccio, M. Observing sea oil pollution using synthetic aperture radar measurements: From theory to applications. In Proceedings of the OCEANS 2023—Limerick, Limerick, Ireland, 5–8 June 2023; pp. 1–4. [Google Scholar] [CrossRef]
- Zhang, Z.; Lin, H.; Wang, M.; Liu, X.; Chen, Q.; Wang, C.; Zhang, H. A Review of Satellite Synthetic Aperture Radar Interferometry Applications in Permafrost Regions: Current status, challenges, and trends. IEEE Geosci. Remote Sens. Mag. 2022, 10, 93–114. [Google Scholar] [CrossRef]
- Cruz, H.; Véstias, M.; Monteiro, J.; Neto, H.; Duarte, R.P. A Review of Synthetic-Aperture Radar Image Formation Algorithms and Implementations: A Computational Perspective. Remote Sens. 2022, 14, 1258. [Google Scholar] [CrossRef]
- Pi, Y.; Yang, J.; Fu, Y.; Yang, X. Principle of Synthetic Aperture Radar Imaging; University of Electronic Science and Technology of China Press: Chengdu, China, 2007. [Google Scholar]
- Munson, D.; O’brien, J.; Kenneth Jenkins, W. A Tomographic Formulation of Spotlight-Mode Synthetic Aperture Radar. Proc. IEEE 1983, 71, 917–925. [Google Scholar] [CrossRef]
- Wu, C.; Liu, K.; Jin, M. Modeling and a Correlation Algorithm for Spaceborne SAR Signals. IEEE Trans. Aerosp. Electron. Syst. 1982, AES-18, 563–575. [Google Scholar] [CrossRef]
- Raney, R.; Runge, H.; Bamler, R.; Cumming, I.; Wong, F. Precision SAR processing using chirp scaling. IEEE Trans. Geosci. Remote Sens. 1994, 32, 786–799. [Google Scholar] [CrossRef]
- Mittermayer, J.; Moreira, A.; Loffeld, O. Spotlight SAR data processing using the frequency scaling algorithm. IEEE Trans. Geosci. Remote Sens. 1999, 37, 2198–2214. [Google Scholar] [CrossRef]
- Raney, R.K. Synthetic Aperture Imaging Radar and Moving Targets. IEEE Trans. Aerosp. Electron. Syst. 1971, AES-7, 499–505. [Google Scholar] [CrossRef]
- Sheng, W.; Mao, S. An Effective Method for Ground Moving Target Imaging and Location in SAR System. J. Electron. Inf. Technol. 2004, 26, 598–606. [Google Scholar]
- Freeman, A.; Currie, A. Synthetic aperture radar (SAR) images of moving targets. GEC J. Res. 1987, 5, 106–115. [Google Scholar]
- Barbarossa, S. Doppler-Rate Filtering For Detecting Moving Targets with Synthetic Aperture Radars. In Proceedings of the Defense, Security, and Sensing, Orlando, FL, USA, 27–28 March 1989. [Google Scholar]
- Barbarossa, S.; Farina, A. A novel procedure for detecting and focusing moving objects with SAR based on the Wigner-Ville distribution. In Proceedings of the IEEE International Conference on Radar, Arlington, VA, USA, 7–10 May 1990; pp. 44–50. [Google Scholar] [CrossRef]
- Xia, X.; Wang, G.; Chen, V. Quantitative SNR analysis for ISAR imaging using joint time-frequency analysis-Short time Fourier transform. IEEE Trans. Aerosp. Electron. Syst. 2002, 38, 649–659. [Google Scholar] [CrossRef]
- Barbarossa, S.; Farina, A. Detection and imaging of moving objects with synthetic aperture radar. Part 2: Joint time-frequency analysis by Wigner-Ville distribution. IEE Proc. F (Radar Signal Process.) 1992, 139, 89–97. [Google Scholar] [CrossRef]
- Perry, R.; DiPietro, R.; Fante, R. SAR imaging of moving targets. IEEE Trans. Aerosp. Electron. Syst. 1999, 35, 188–200. [Google Scholar] [CrossRef]
- Zhu, D.; Li, Y.; Zhu, Z. A Keystone Transform Without Interpolation for SAR Ground Moving-Target Imaging. IEEE Geosci. Remote Sens. Lett. 2007, 4, 18–22. [Google Scholar] [CrossRef]
- Li, G.; Xia, X.G.; Peng, Y.N. Doppler Keystone Transform: An Approach Suitable for Parallel Implementation of SAR Moving Target Imaging. IEEE Geosci. Remote Sens. Lett. 2008, 5, 573–577. [Google Scholar] [CrossRef]
- Huang, P.; Liao, G.; Yang, Z.; Xia, X.G.; Ma, J.T.; Ma, J. Long-Time Coherent Integration for Weak Maneuvering Target Detection and High-Order Motion Parameter Estimation Based on Keystone Transform. IEEE Trans. Signal Process. 2016, 64, 4013–4026. [Google Scholar] [CrossRef]
- Zeng, C.; Li, D.; Luo, X.; Song, D.; Liu, H.; Su, J. Ground Maneuvering Targets Imaging for Synthetic Aperture Radar Based on Second-Order Keystone Transform and High-Order Motion Parameter Estimation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 4486–4501. [Google Scholar] [CrossRef]
- Jao, J.K. Theory of synthetic aperture radar imaging of a moving target. IEEE Trans. Geosci. Remote Sens. 2001, 39, 1984–1992. [Google Scholar] [CrossRef]
- Vu, V.T.; Sjogren, T.K.; Pettersson, M.I.; Gustavsson, A.; Ulander, L.M.H. Detection of Moving Targets by Focusing in UWB SAR—Theory and Experimental Results. IEEE Trans. Geosci. Remote Sens. 2010, 48, 3799–3815. [Google Scholar] [CrossRef]
- Sjogren, T.K.; Vu, V.T.; Pettersson, M.I.; Gustavsson, A.; Ulander, L.M.H. Moving Target Relative Speed Estimation and Refocusing in Synthetic Aperture Radar Images. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 2426–2436. [Google Scholar] [CrossRef][Green Version]
- Vu, V.T.; Pettersson, M.I.; Sjögren, T.K. Moving Target Focusing in SAR Image With Known Normalized Relative Speed. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 854–861. [Google Scholar] [CrossRef]
- Rosen, P.; Hensley, S.; Joughin, I.; Li, F.; Madsen, S.; Rodriguez, E.; Goldstein, R. Synthetic aperture radar interferometry. Proc. IEEE 2000, 88, 333–382. [Google Scholar] [CrossRef]
- Cutrona, L.; Leith, E.; Porcello, L.; Vivian, W. On the application of coherent optical processing techniques to synthetic-aperture radar. Proc. IEEE 1966, 54, 1026–1032. [Google Scholar] [CrossRef]
- Tomiyasu, K. Tutorial review of synthetic-aperture radar (SAR) with applications to imaging of the ocean surface. Proc. IEEE 1978, 66, 563–583. [Google Scholar] [CrossRef]
- Marchese, L.; Bourqui, P.; Turgeon, S.; Harnisch, B.; Suess, M.; Doucet, M.; Turbide, S.; Bergeron, A. Extended capability overview of real-time optronic SAR processing. In Proceedings of the IET International Conference on Radar Systems (Radar 2012), Glasgow, UK, 22–25 October 2012; pp. 1–5. [Google Scholar] [CrossRef]
- Wang, D.; Zhang, Y.; Yang, C.; Wang, K. Study on processing synthetic aperture radar data based on optical 4f system for fast imaging. Opt. Express 2022, 30, 44408–44419. [Google Scholar] [CrossRef]
- Yang, C.; Zhang, Y.; Wang, D.; Wang, K. Compact optical real-time imaging system for high-resolution SAR data based on autofocusing. Opt. Commun. 2023, 546, 129751. [Google Scholar] [CrossRef]
- Goodman, J.W. Introduction to Fourier Optics, 4th ed.; W. H. Freeman and Company: New York, NY, USA, 2017. [Google Scholar]
- Lv, N. Fourier Optics, 3rd ed.; China Machine Press: Beijing, China, 2016. [Google Scholar]













| Parameter | Value |
|---|---|
| Speed of light (c) | 3 × 108 m/s |
| Pixel size of SLM () | 3.74 × 10−6 m |
| Wavelength of laser () | 5.32 × 10−7 m |
| Wavelength of electromagnetic wave () | |
| Radar sampling rate () | 1 × 109 Hz |
| Radar pulse interval () | |
| The slant distance subtracted (R) | |
| Radar operating altitude (H) | |
| Radar velocity () | |
| Bandwidth in range direction () | 6 × 108 Hz |
| Synthetic aperture length () | |
| Target location (P) | |
| Target’s velocity along the x-axis () | |
| Target’s velocity along the y-axis () |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, J.; Yang, C.; Wang, D.; Wang, K. Optical Imaging Method of Synthetic-Aperture Radar for Moving Targets. Remote Sens. 2024, 16, 1170. https://doi.org/10.3390/rs16071170
Chen J, Yang C, Wang D, Wang K. Optical Imaging Method of Synthetic-Aperture Radar for Moving Targets. Remote Sensing. 2024; 16(7):1170. https://doi.org/10.3390/rs16071170
Chicago/Turabian StyleChen, Jiajia, Chenguang Yang, Duo Wang, and Kaizhi Wang. 2024. "Optical Imaging Method of Synthetic-Aperture Radar for Moving Targets" Remote Sensing 16, no. 7: 1170. https://doi.org/10.3390/rs16071170
APA StyleChen, J., Yang, C., Wang, D., & Wang, K. (2024). Optical Imaging Method of Synthetic-Aperture Radar for Moving Targets. Remote Sensing, 16(7), 1170. https://doi.org/10.3390/rs16071170