
A Path Planning Method for Collaborative Coverage Monitoring in Urban Scenarios


Abstract
1. Introduction
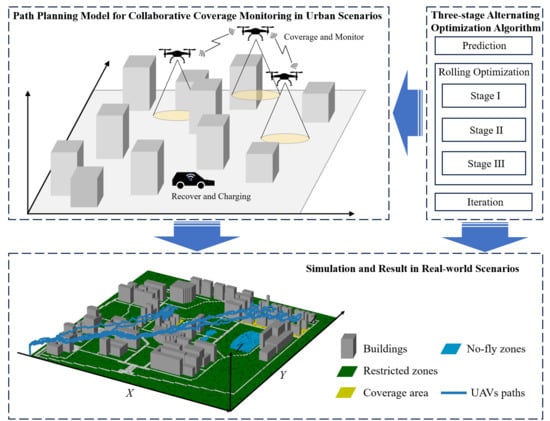
- Due to their limited endurance capability, UAVs alone are not well suited for long-term tasks. To address this limitation, this paper introduces UGVs into the model, leveraging their additional power capacity to enhance the endurance of the UAVs. By incorporating UGVs, the model forms a heterogeneous unmanned system that collaboratively tackles the path-planning problem.
- Conventional optimization methods struggle to effectively optimize problems involving complex interactions among multiple and heterogeneous agents. To tackle this challenge, we propose a Three-stage Alternating Optimization Algorithm (TAOA) to iteratively optimize the unmanned path-planning problem. This algorithm ensures both the effectiveness and efficiency of the solution.
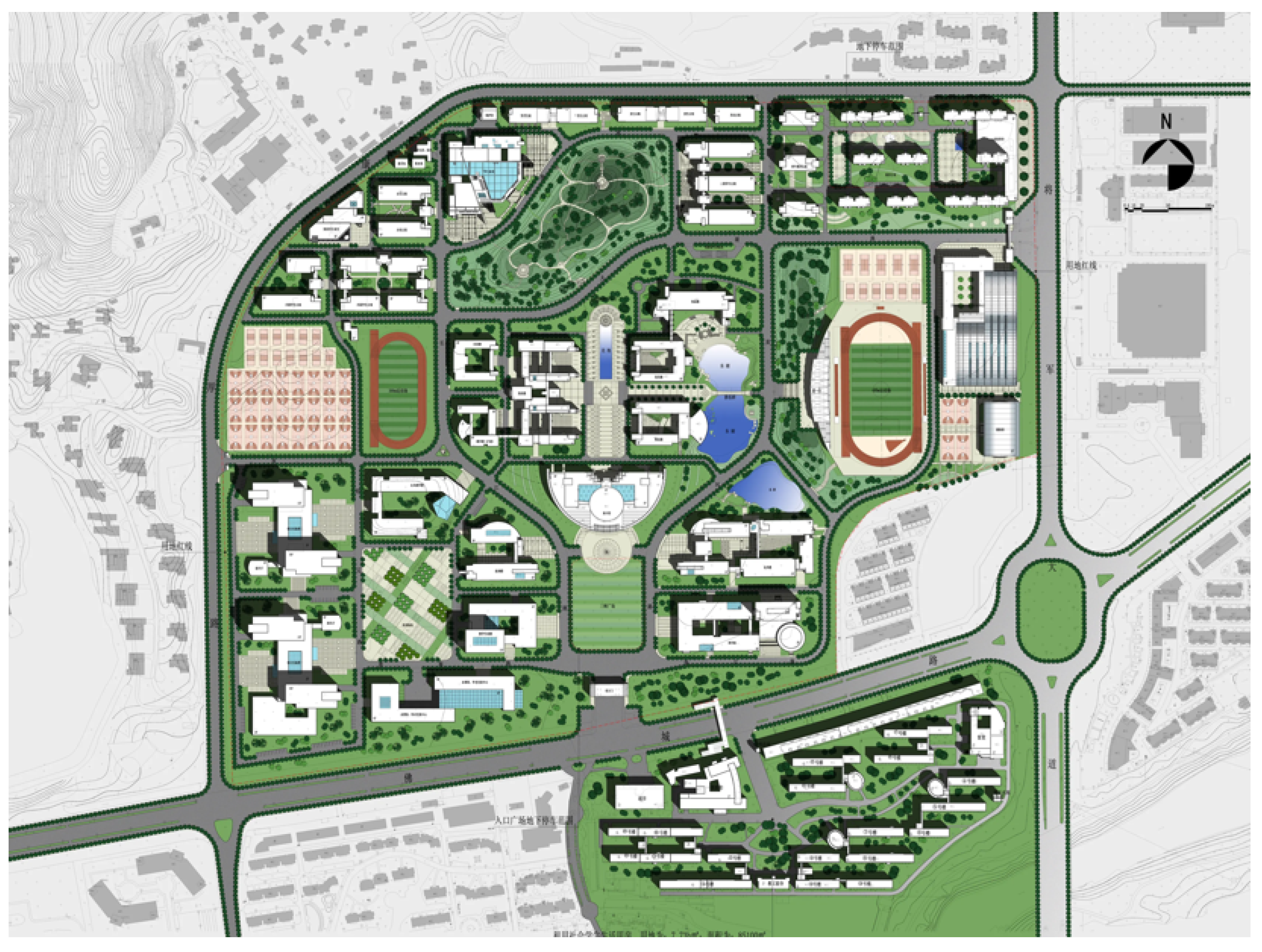
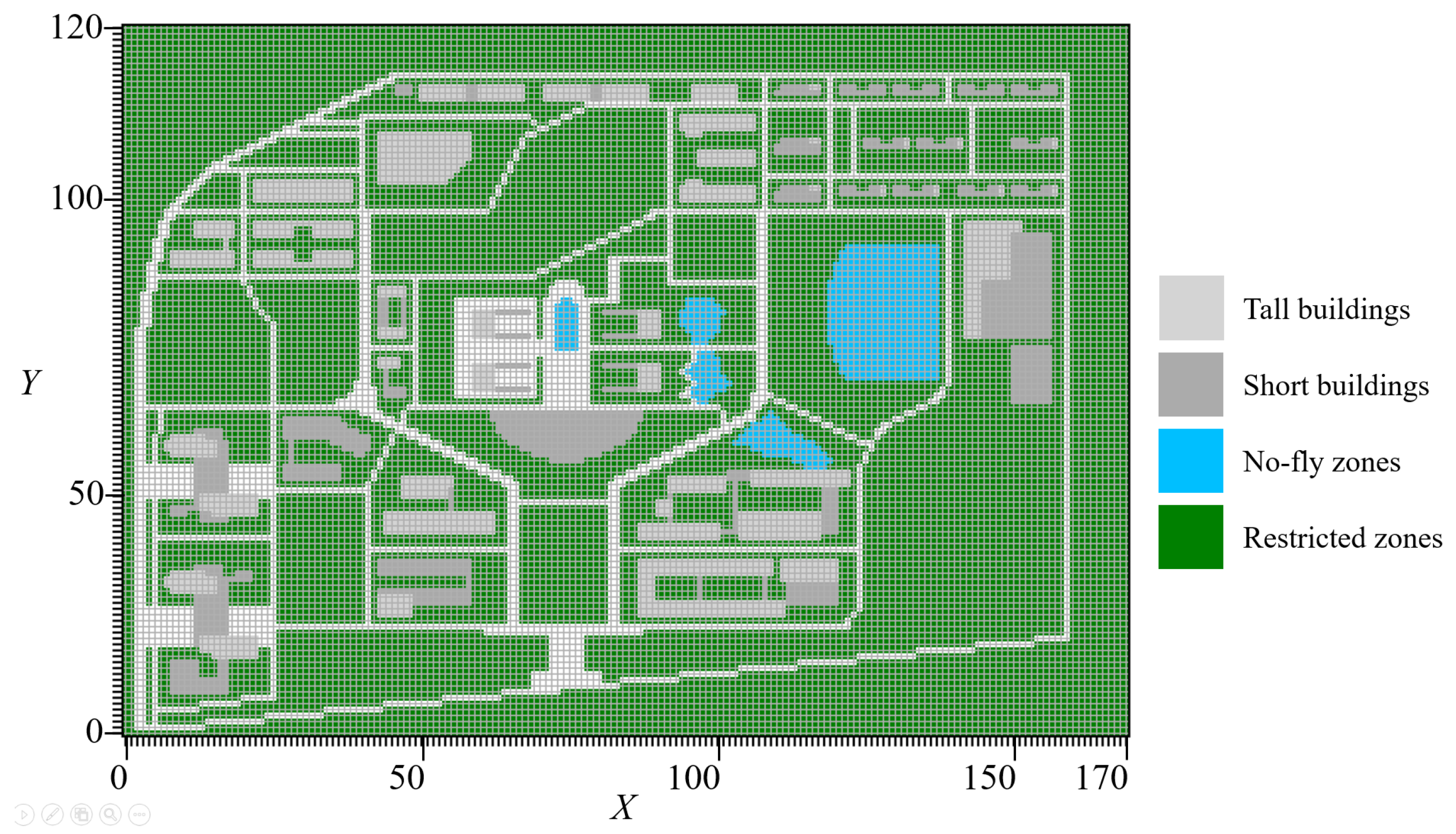
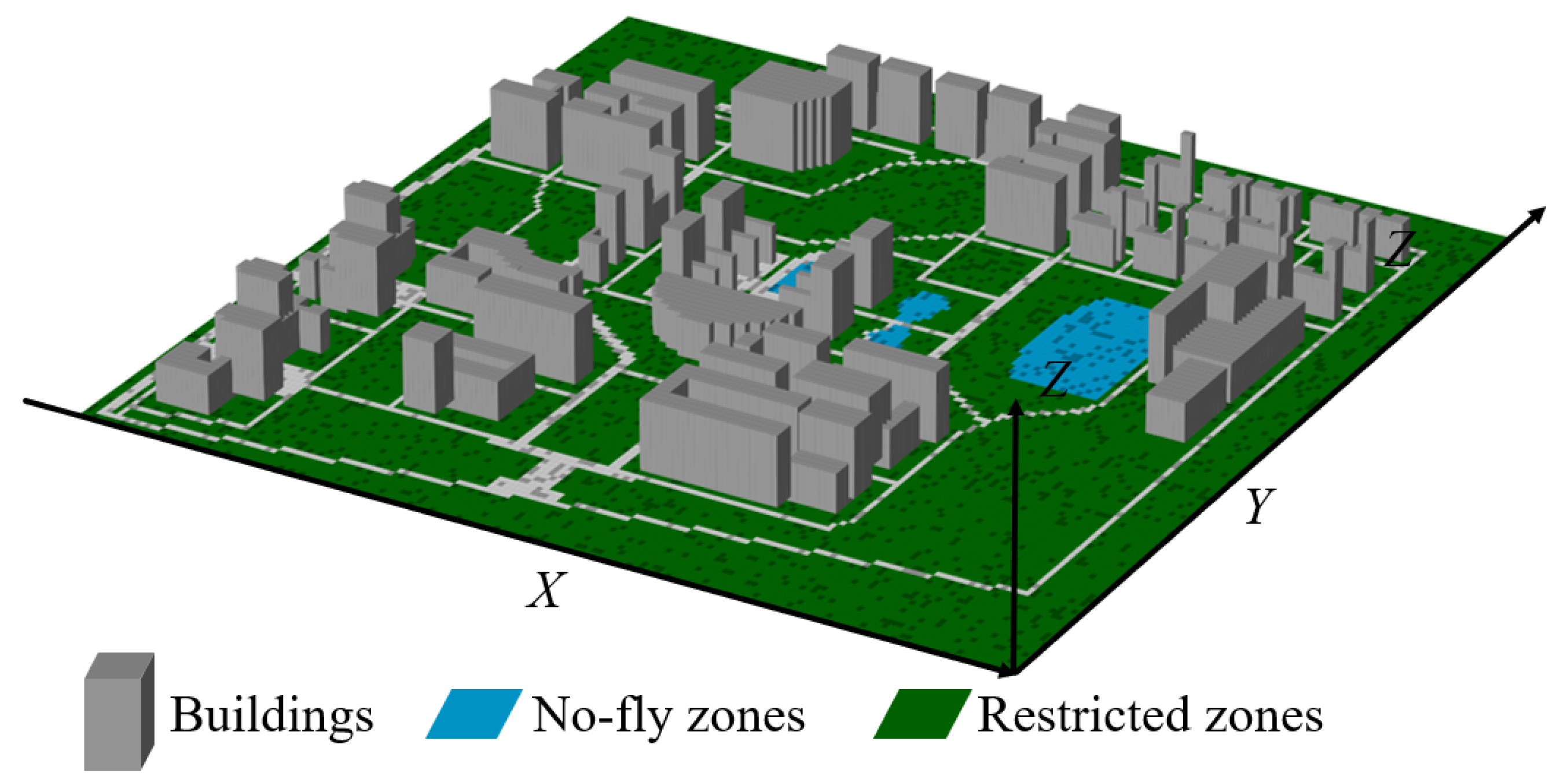
- We integrated the design of restricted zones and no-fly zones into the environmental model, thereby enhancing the authenticity and efficacy of the model. For the experiments, we constructed a simulated environment mapped based on a real-world region. Through simulation experiments conducted in both synthetic and real-world scenarios, the proposed path-planning model and optimization method demonstrated enhanced credibility.
2. Model
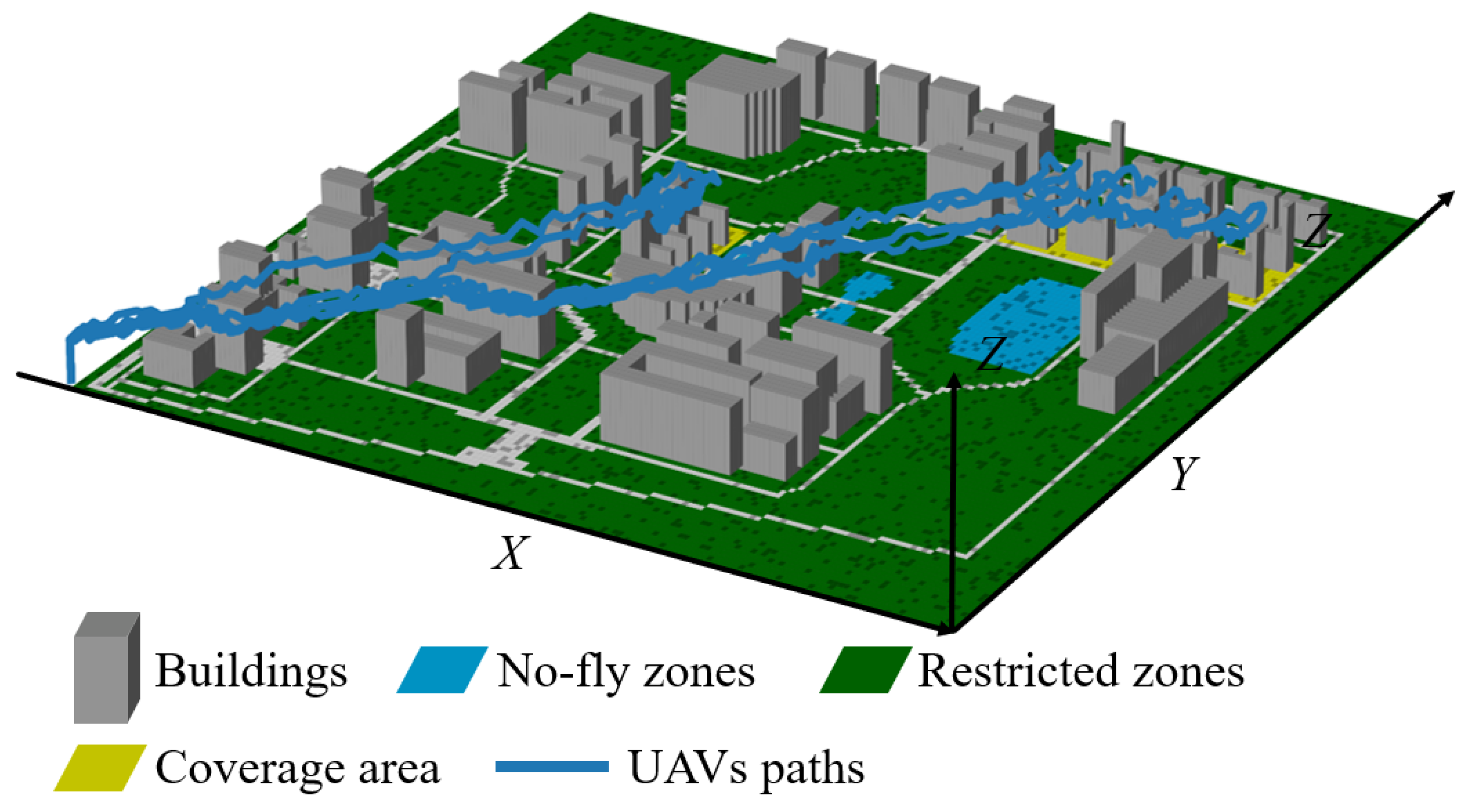
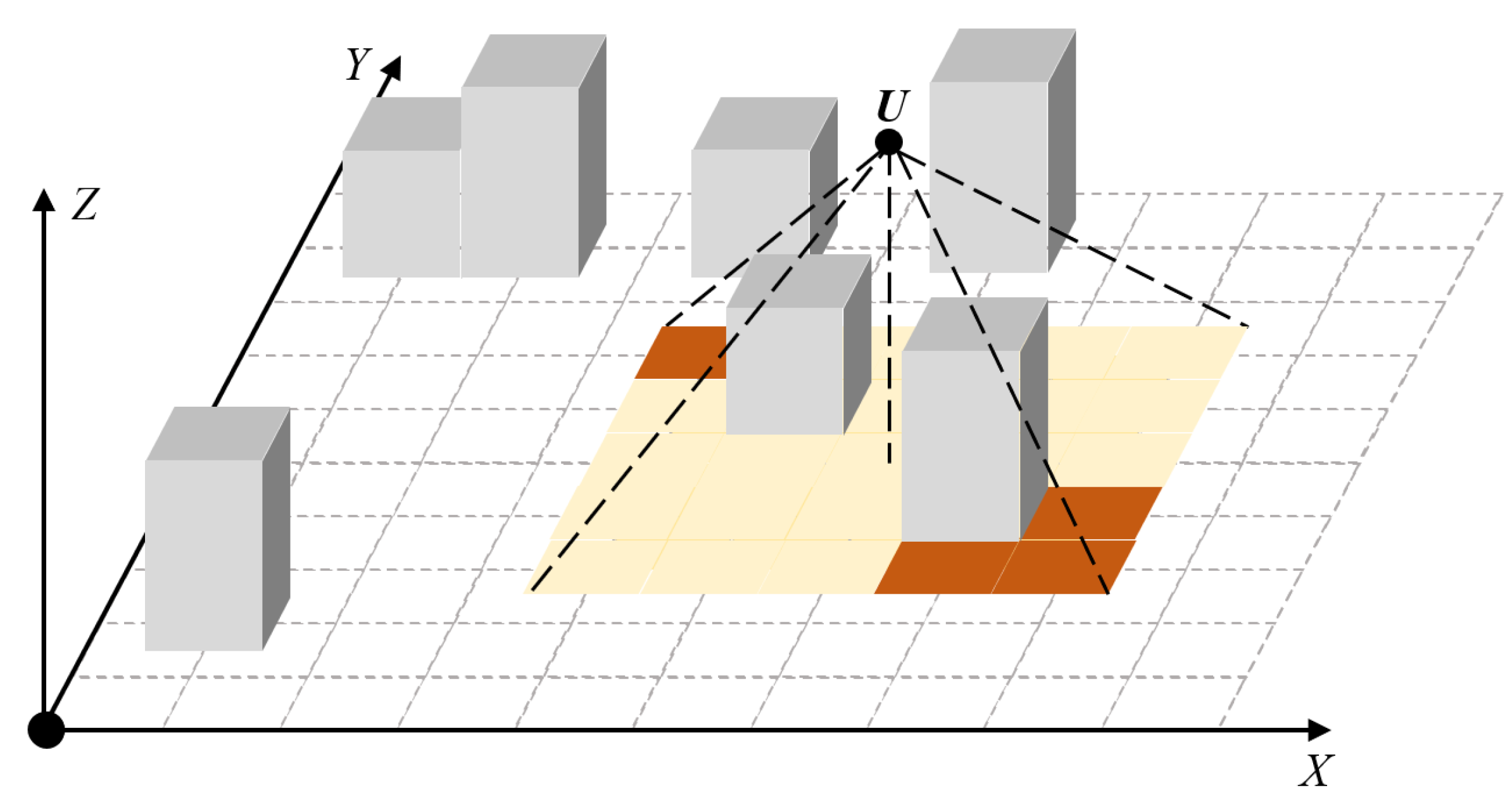
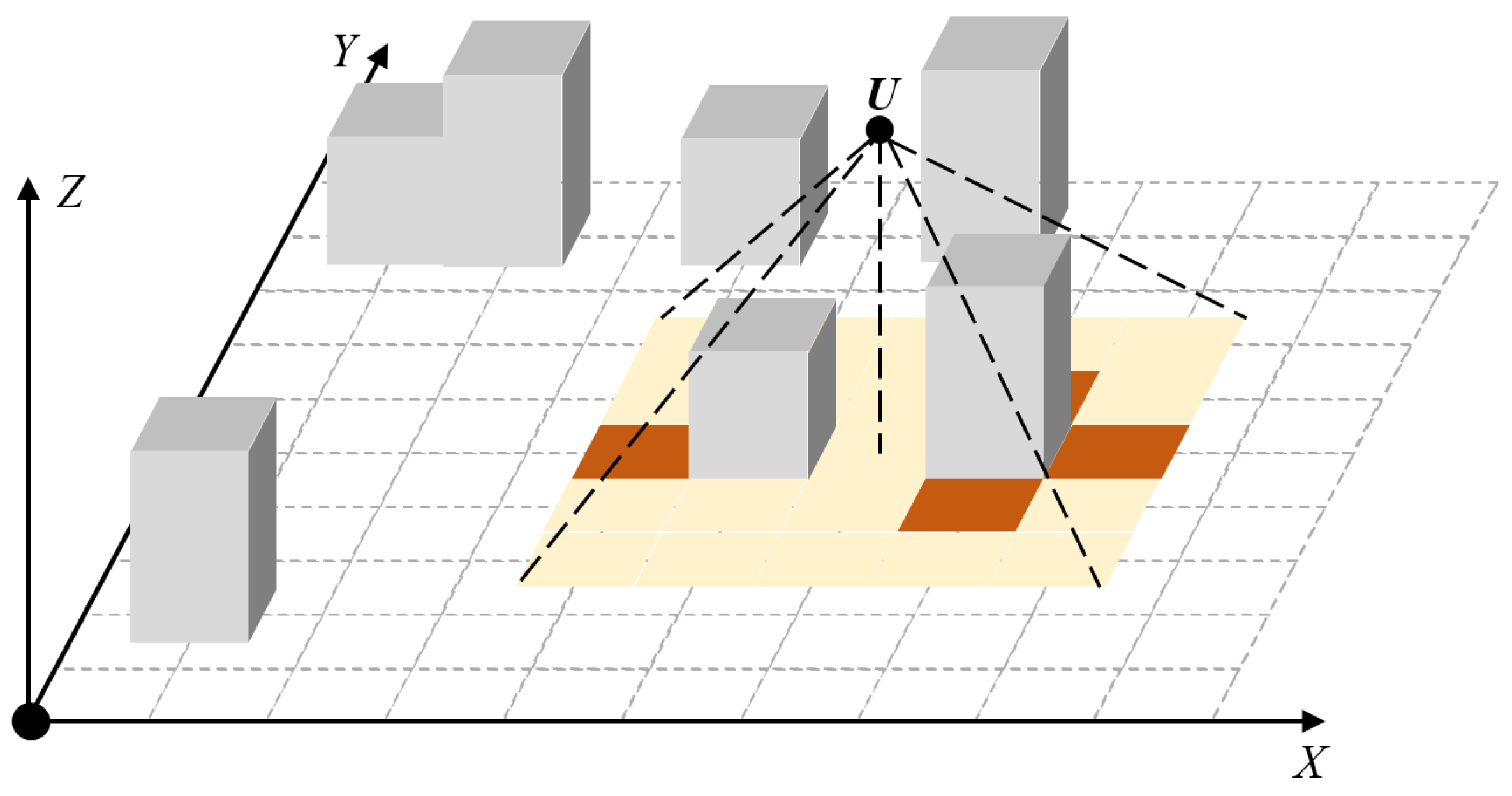
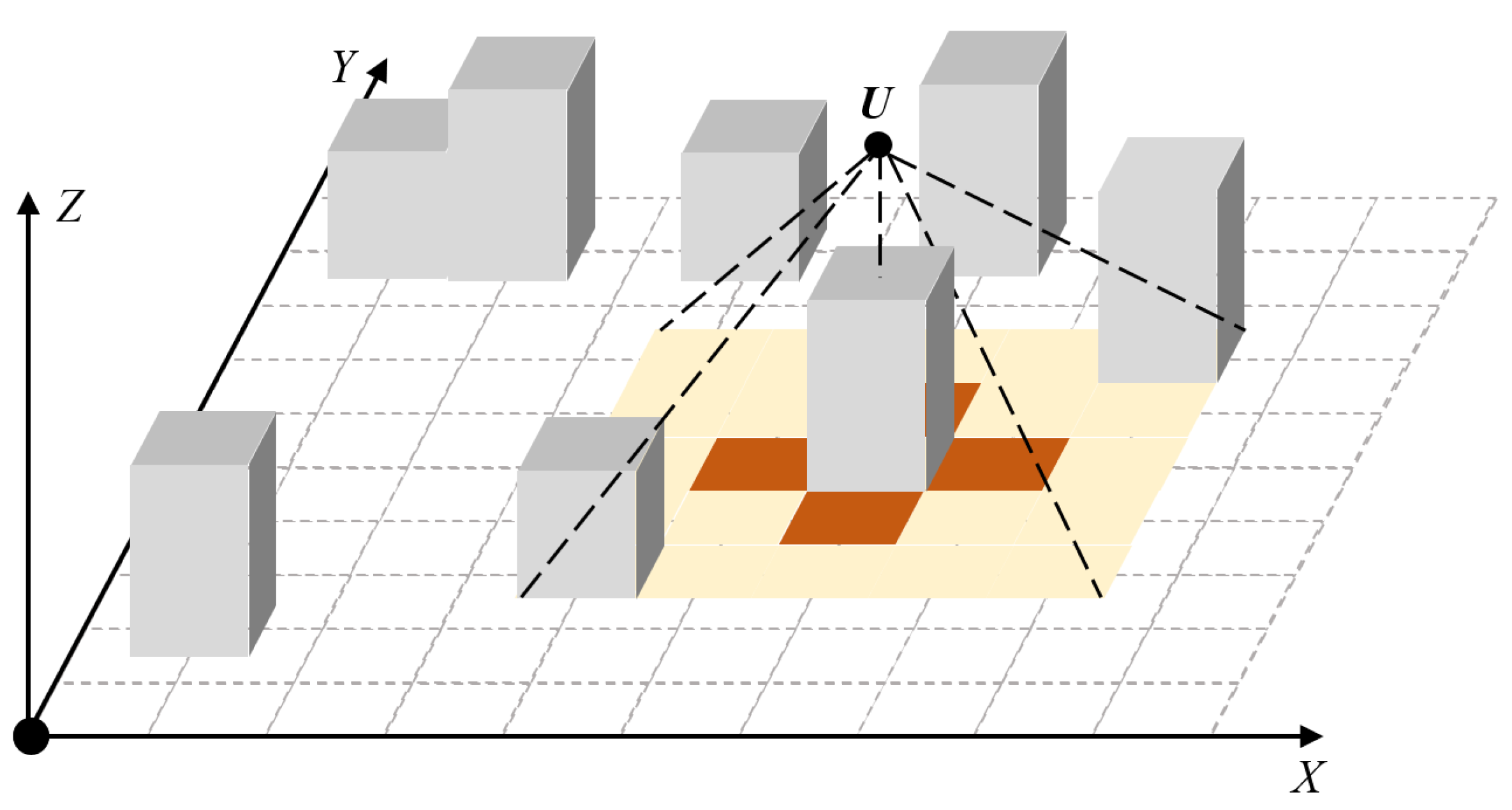
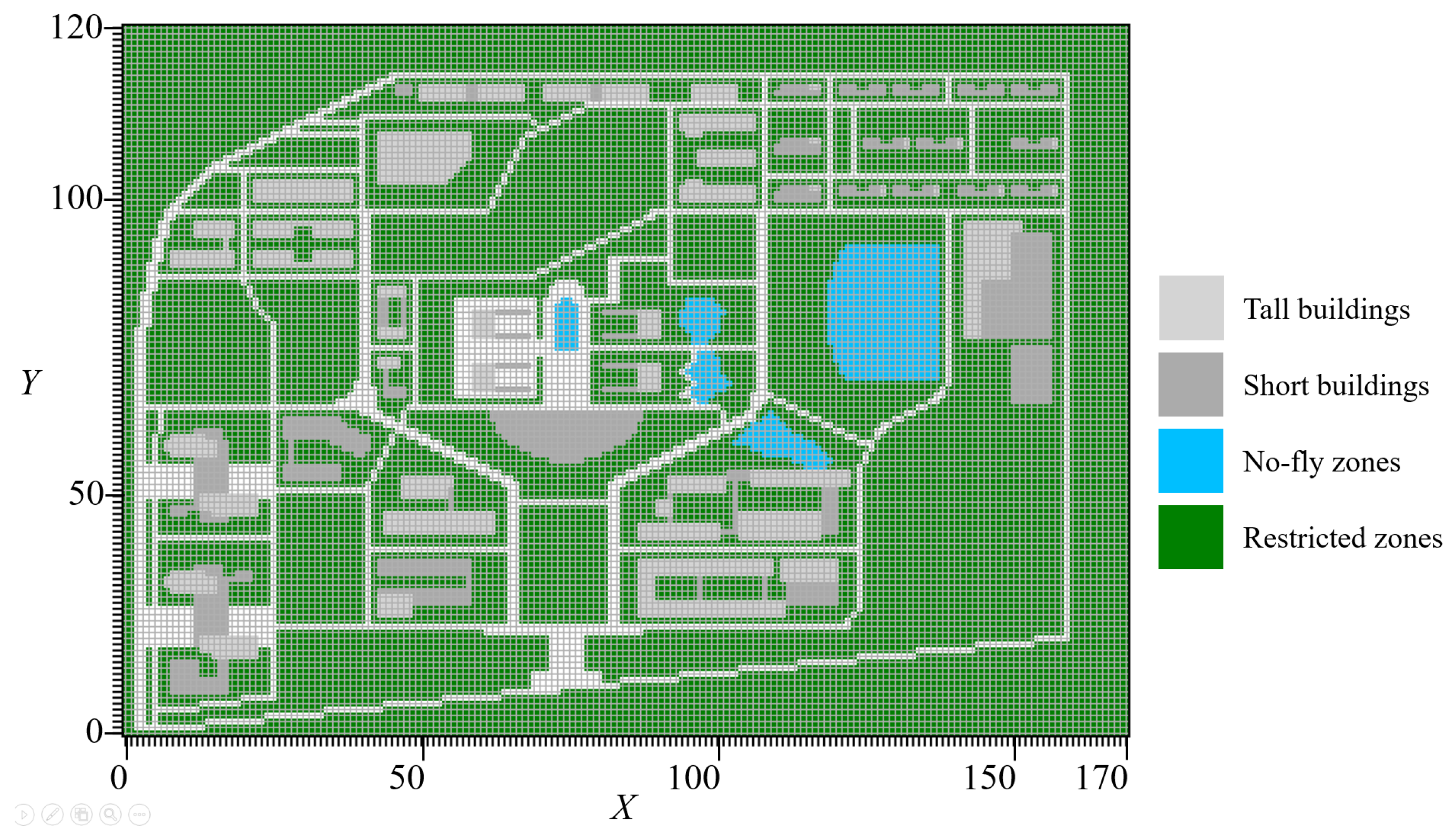
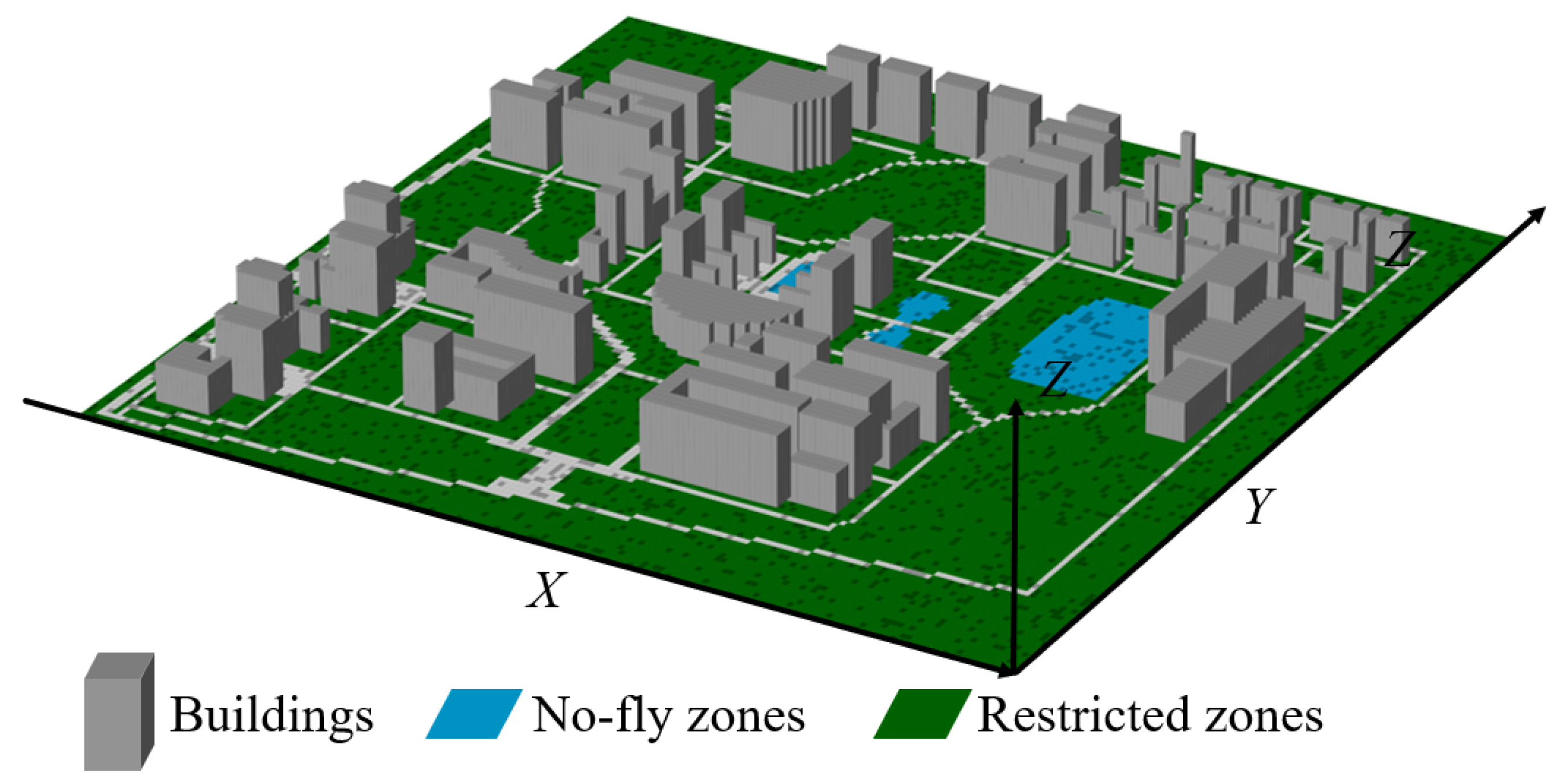
2.1. Environment Model and Problem Description
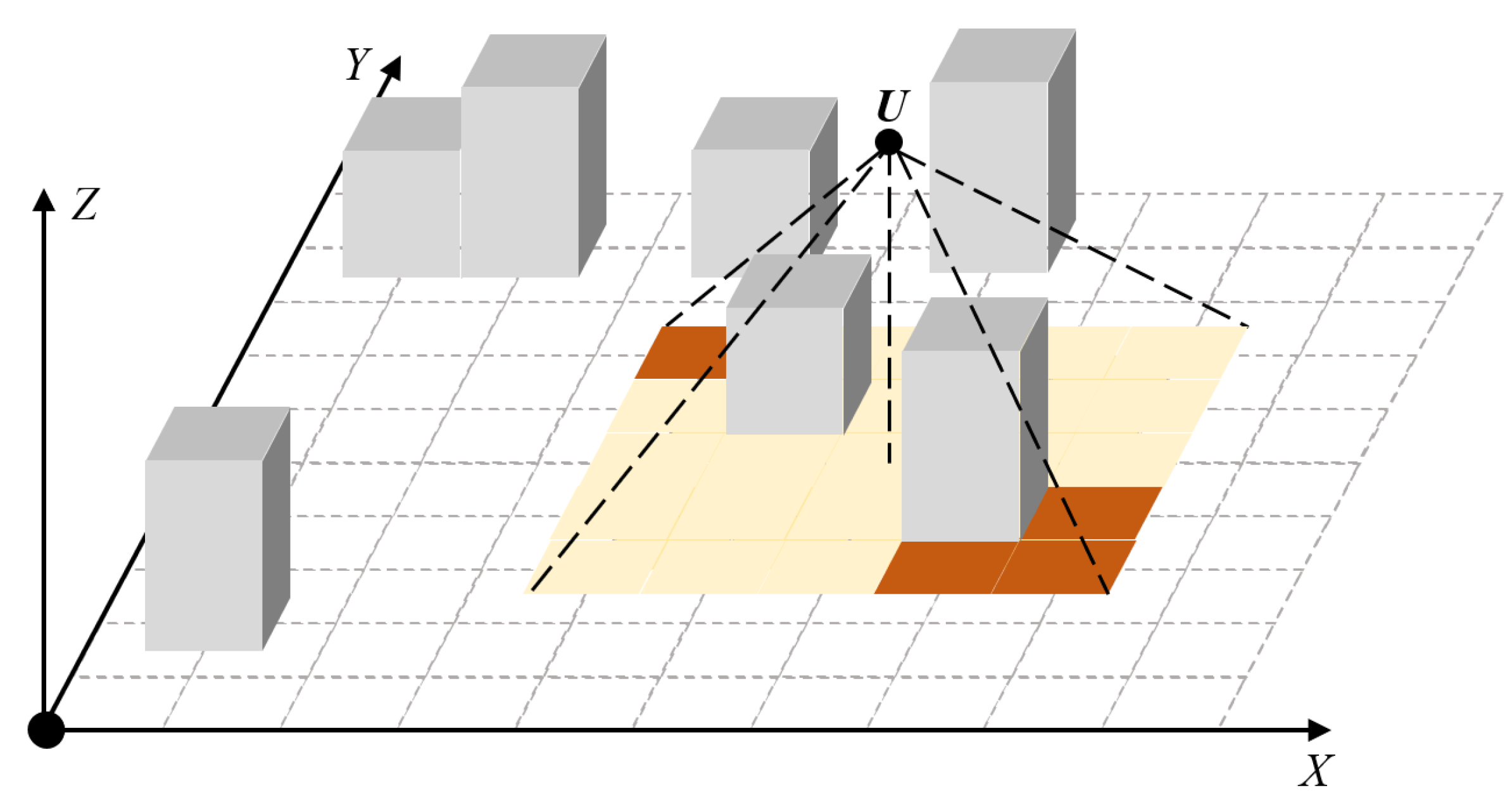
- The UAVs are prohibited from flying above any height in no-fly zones, and the UGV is not allowed to traverse restricted zones.
- The coverage search task for the UAVs has specific requirements for the image resolution, meaning the UAVs must descend to the specified flight altitude to achieve effective coverage.
- The UAVs and UGV have a constraint on the total energy.
- The UAVs need to reserve some battery capacity for hovering and waiting for the UGV to arrive for recharging.
- Only the UAVs hovering above the UGV can be reclaimed and recharged by the UGV.
2.2. Unmanned System Model
2.2.1. Motion Model
2.2.2. Endurance and Bearing Model
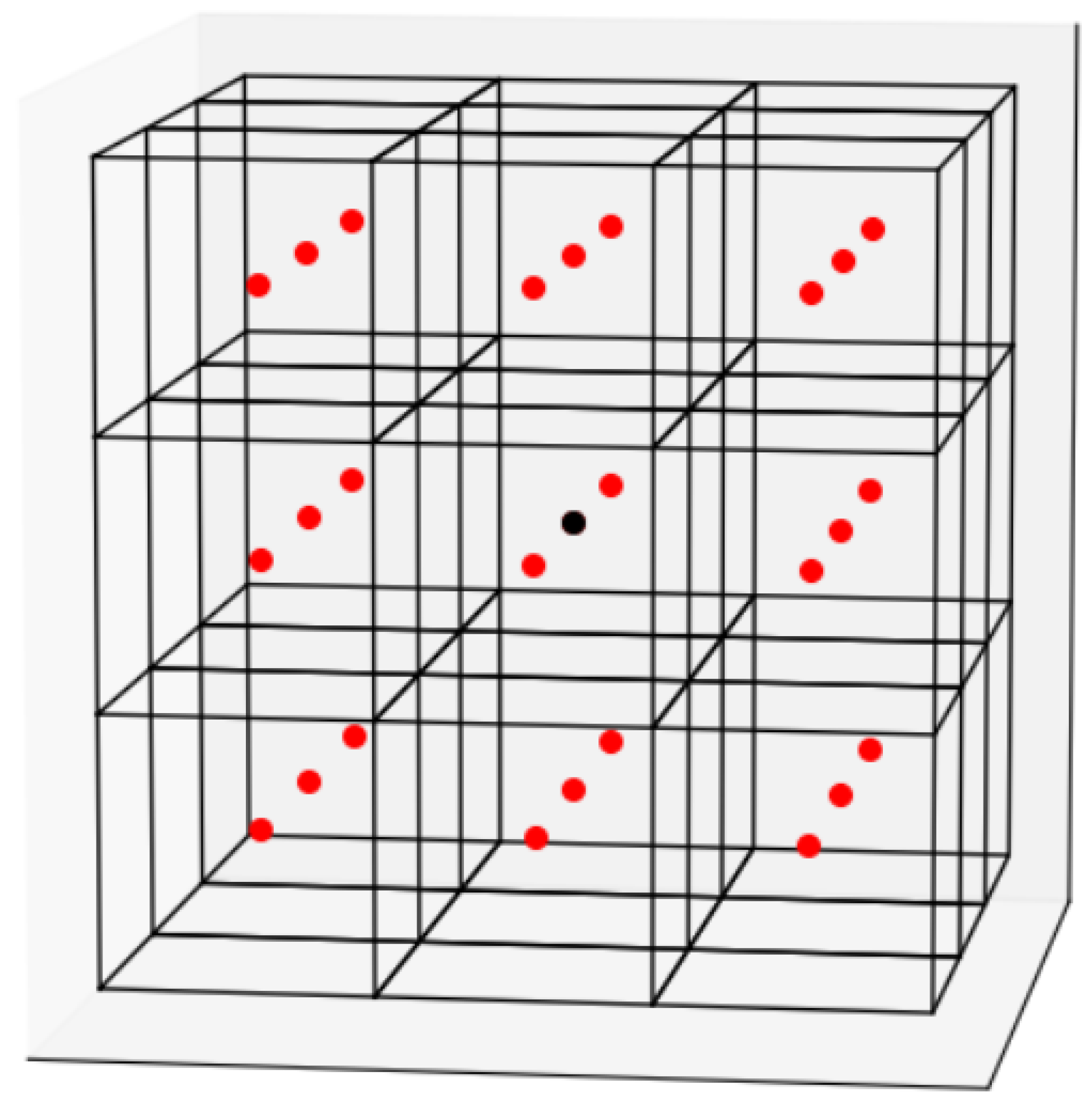
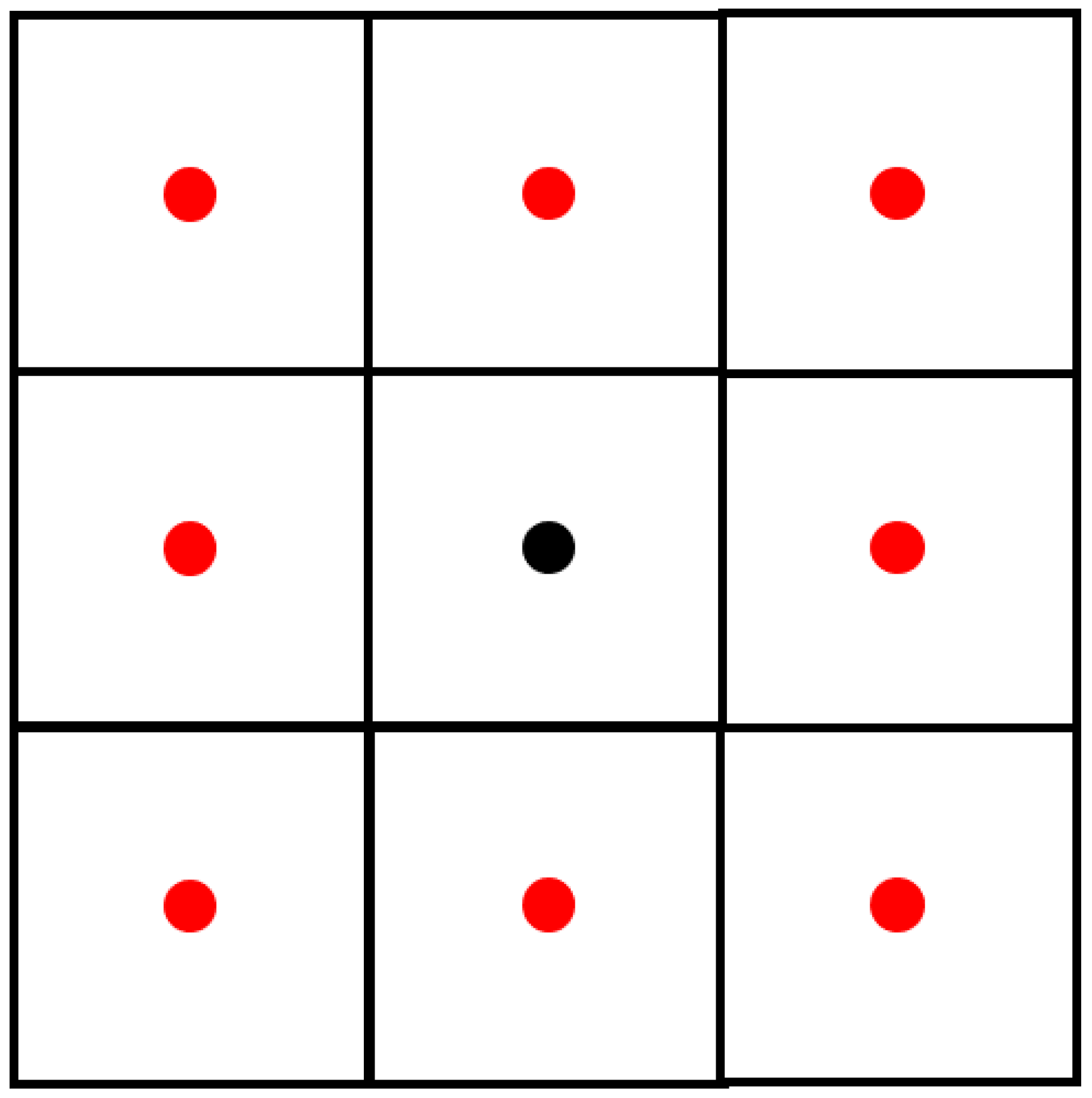
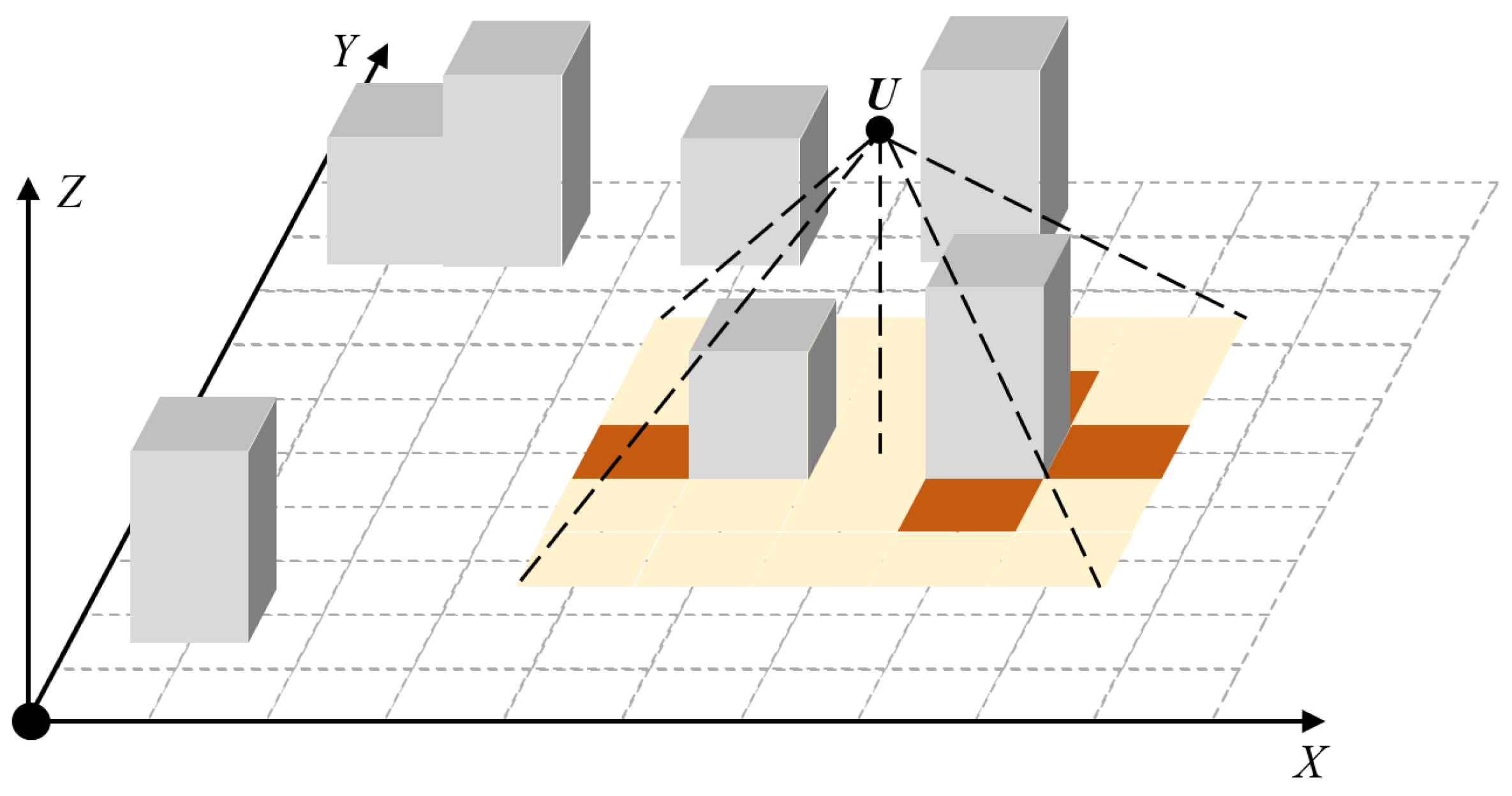
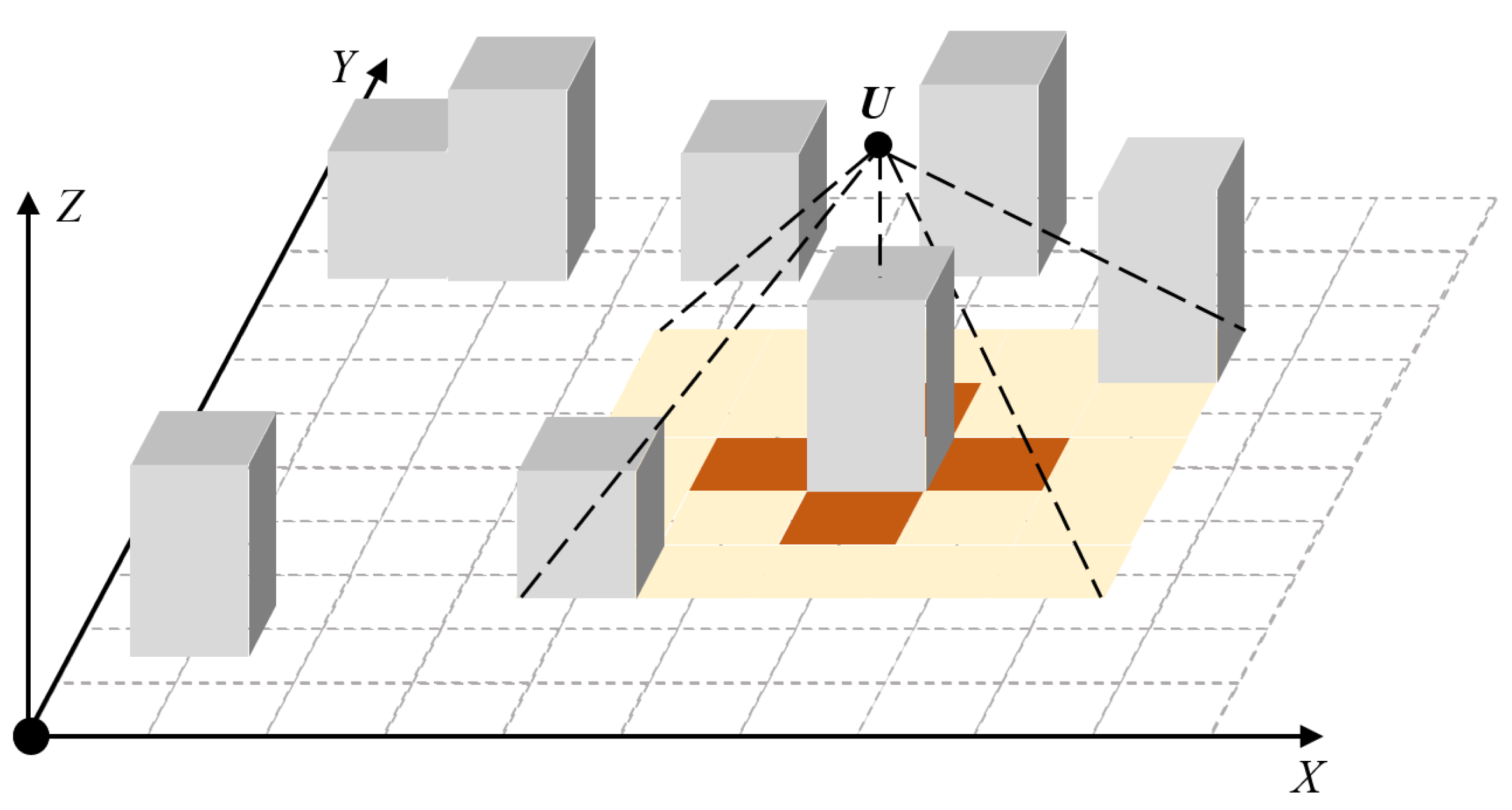
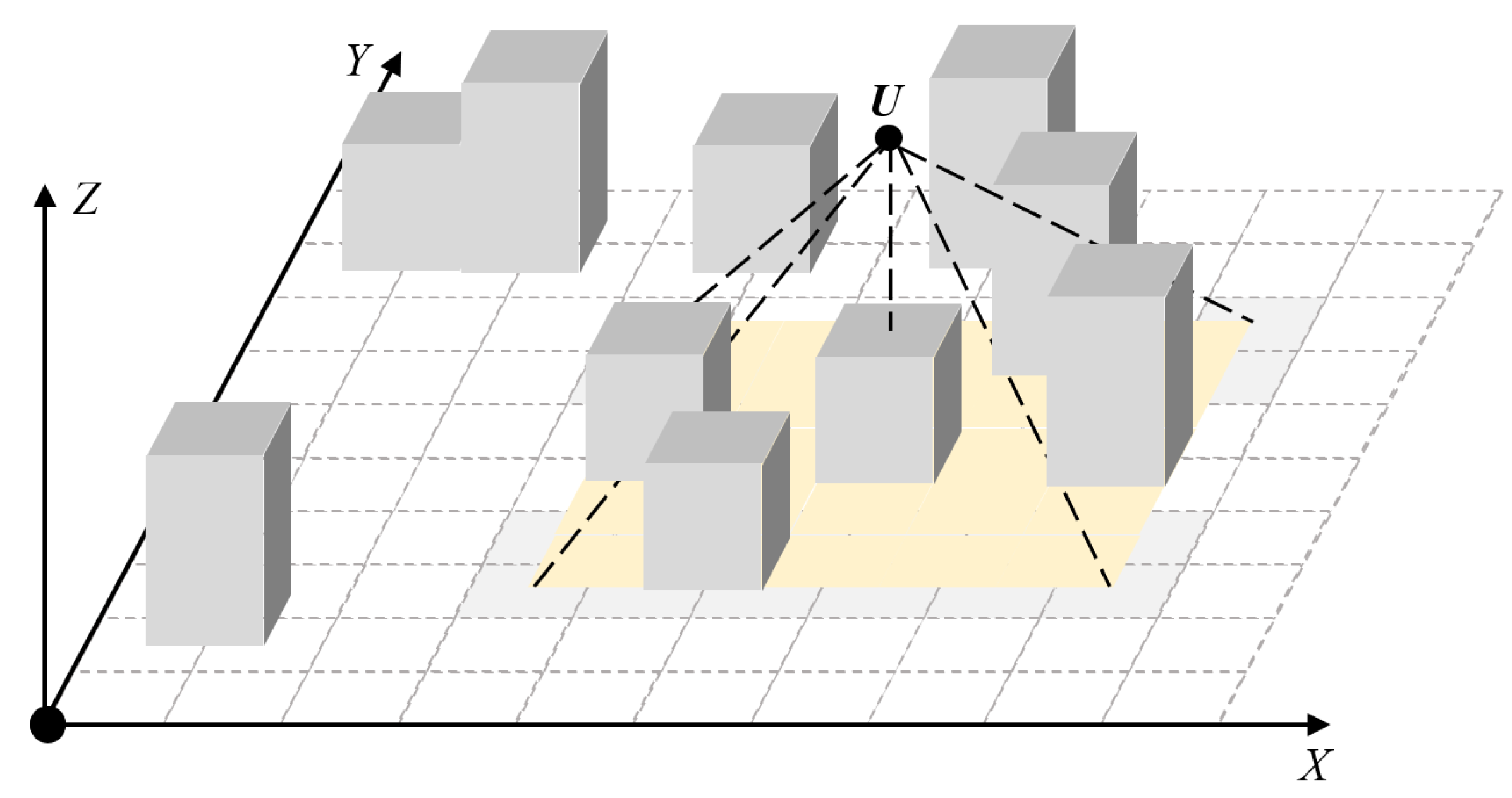
2.2.3. Sensor and Cognitive Map Model
2.3. Constraints
2.3.1. Obstacle Constraint
2.3.2. Energy Constraint
2.3.3. No-Fly Zone and Restricted Zone Constraint
2.4. Objective Functions
2.4.1. Task Time
2.4.2. Energy Consumption
3. Methods
3.1. Prediction
3.2. Rolling Optimization
3.2.1. UAVs’ Path and Charging Point Generation
3.2.2. UGV Path Generation
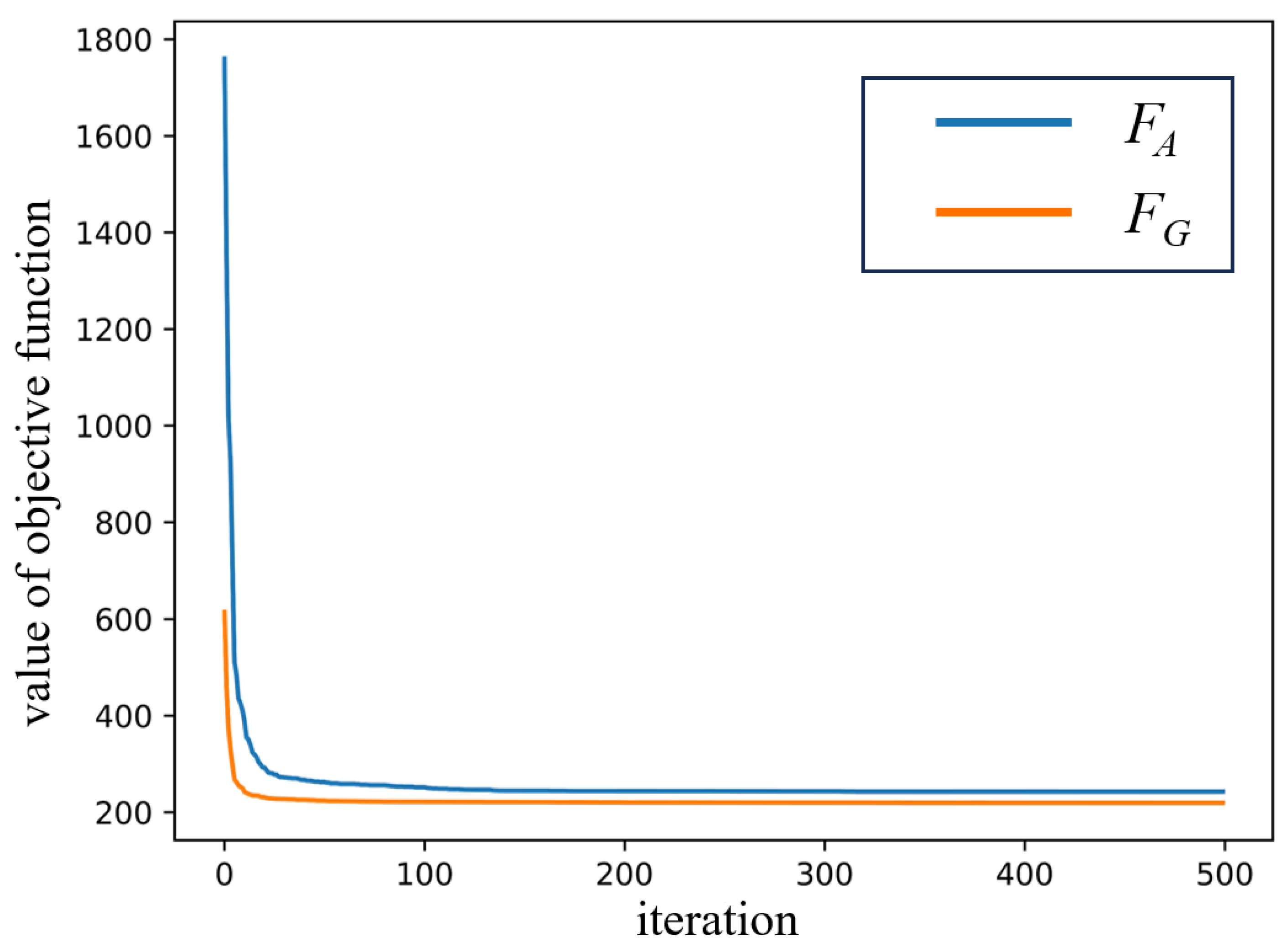
3.2.3. Iteration
3.3. Time Complexity
3.4. Summary
| Algorithm 1: Pseudocode for the TAOA. |
Input: UAVs’ initial state UGV’s initial state UAVs’ minimum energy threshold initial iteration round maximum iteration round task time optimal path planning Output: task time optimal path planning Initialize: WhileDo: Obtain from and Obtain from Equation (34) Calculate based on and in Equation (24) If Do: |
4. Results
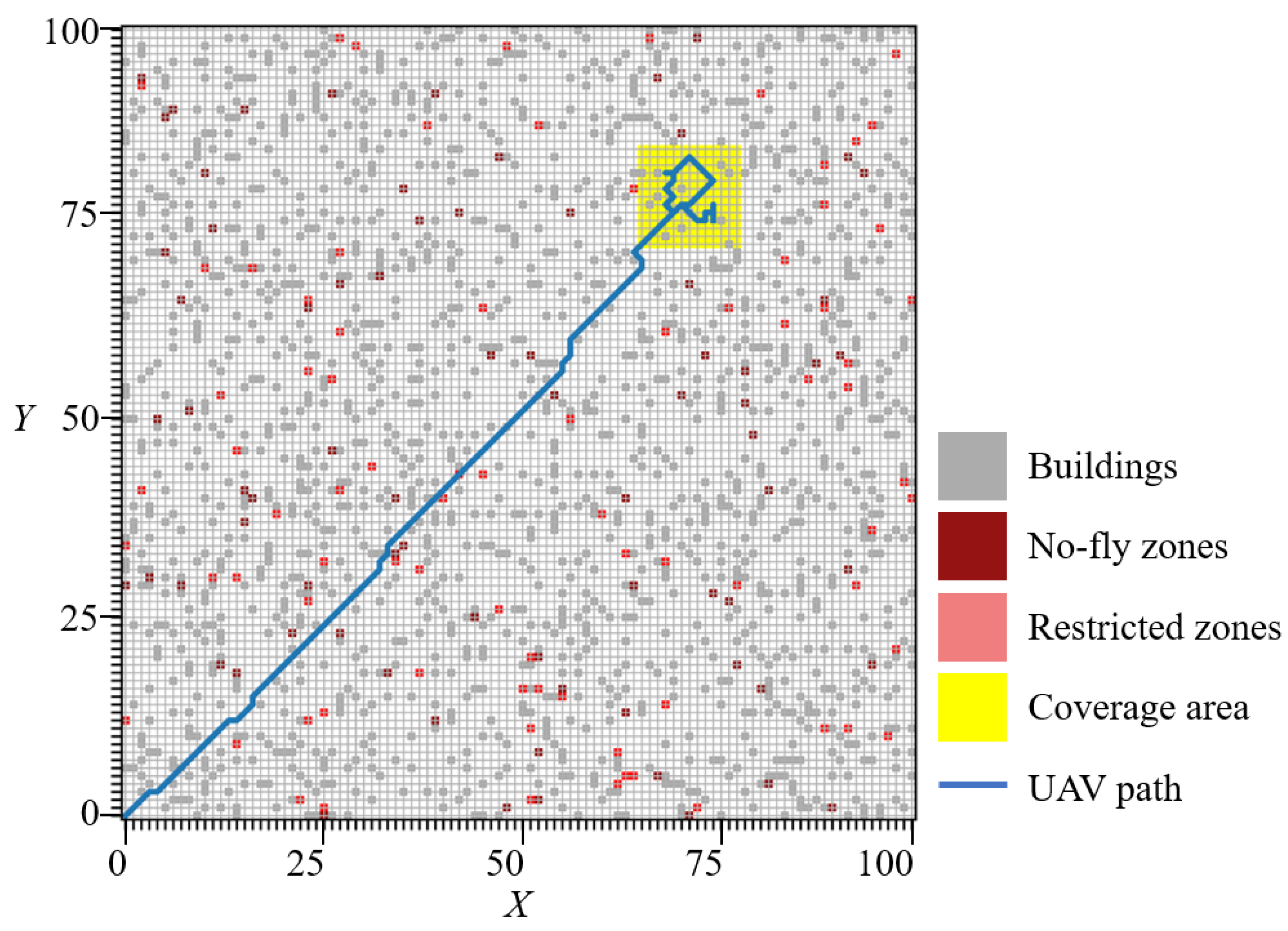
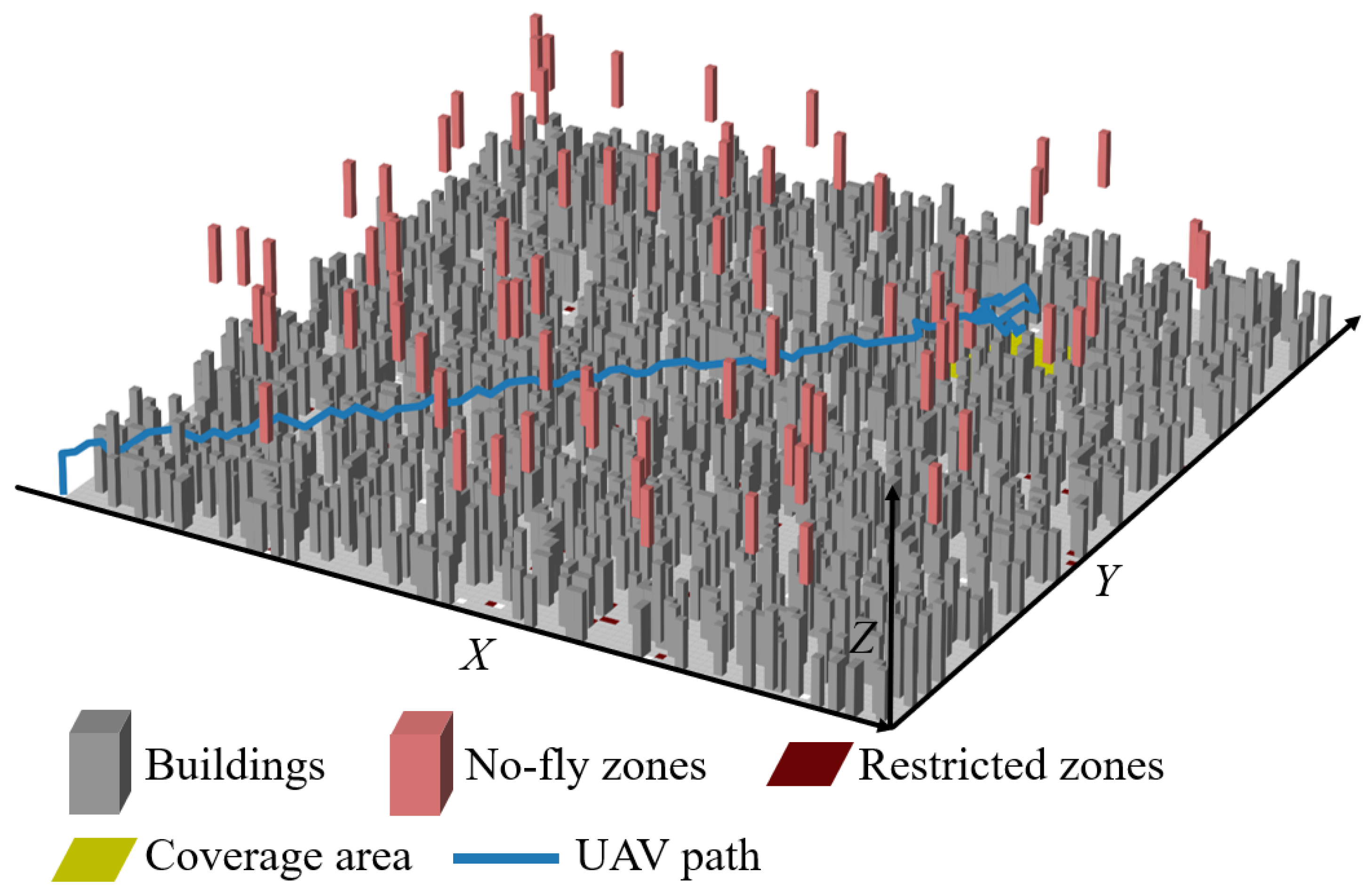
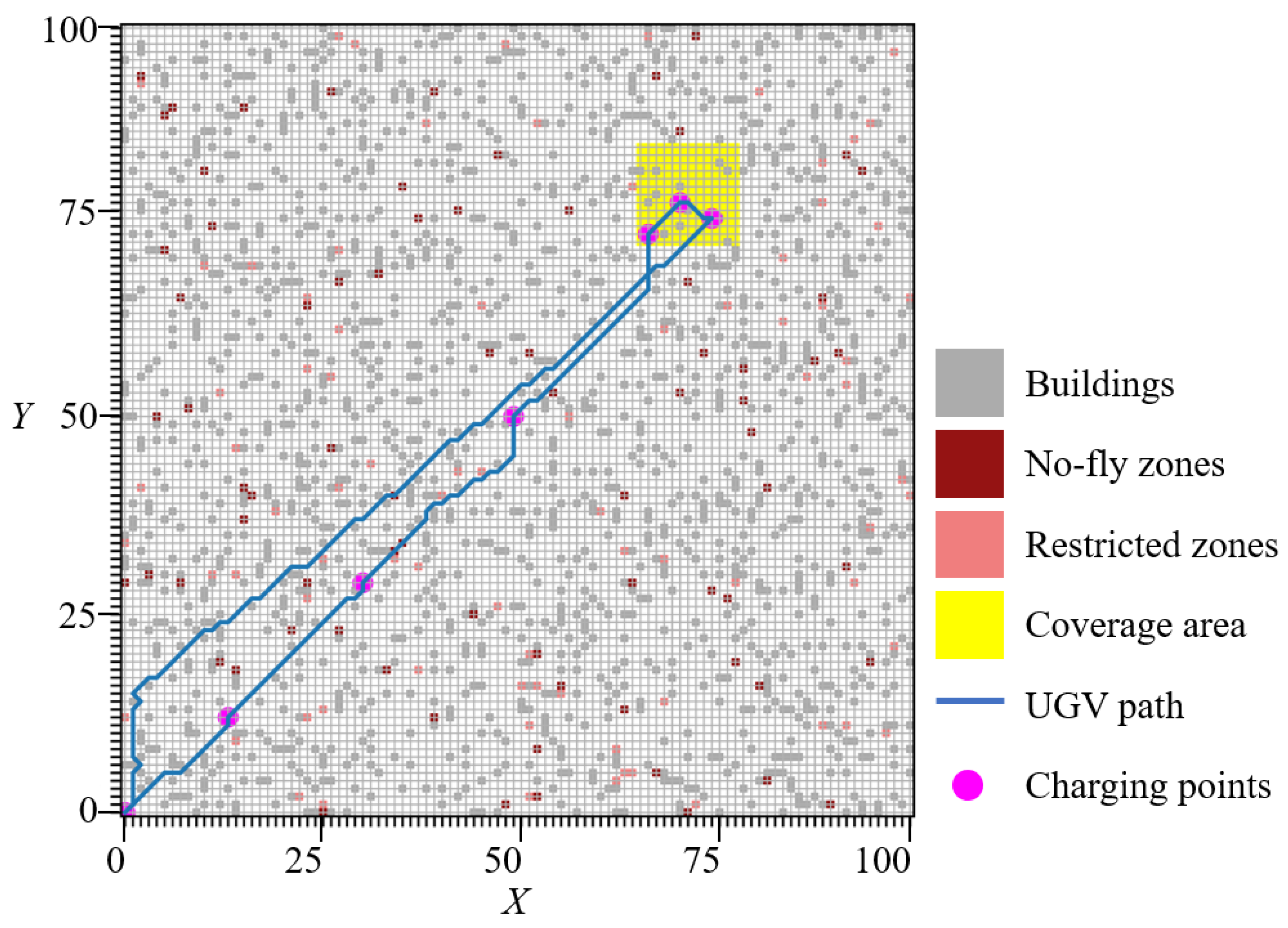
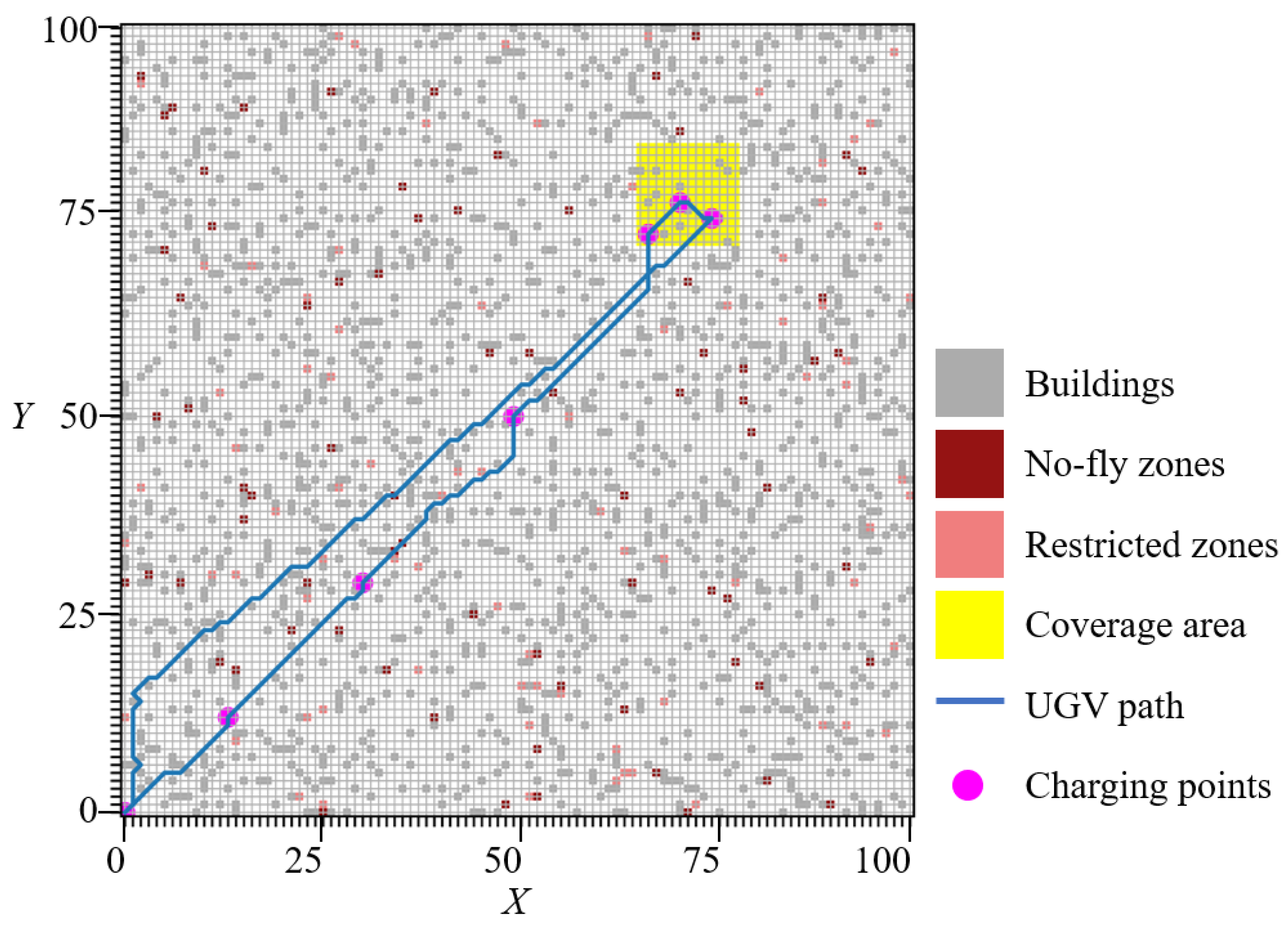
4.1. Simulation of One UAV and One UGV
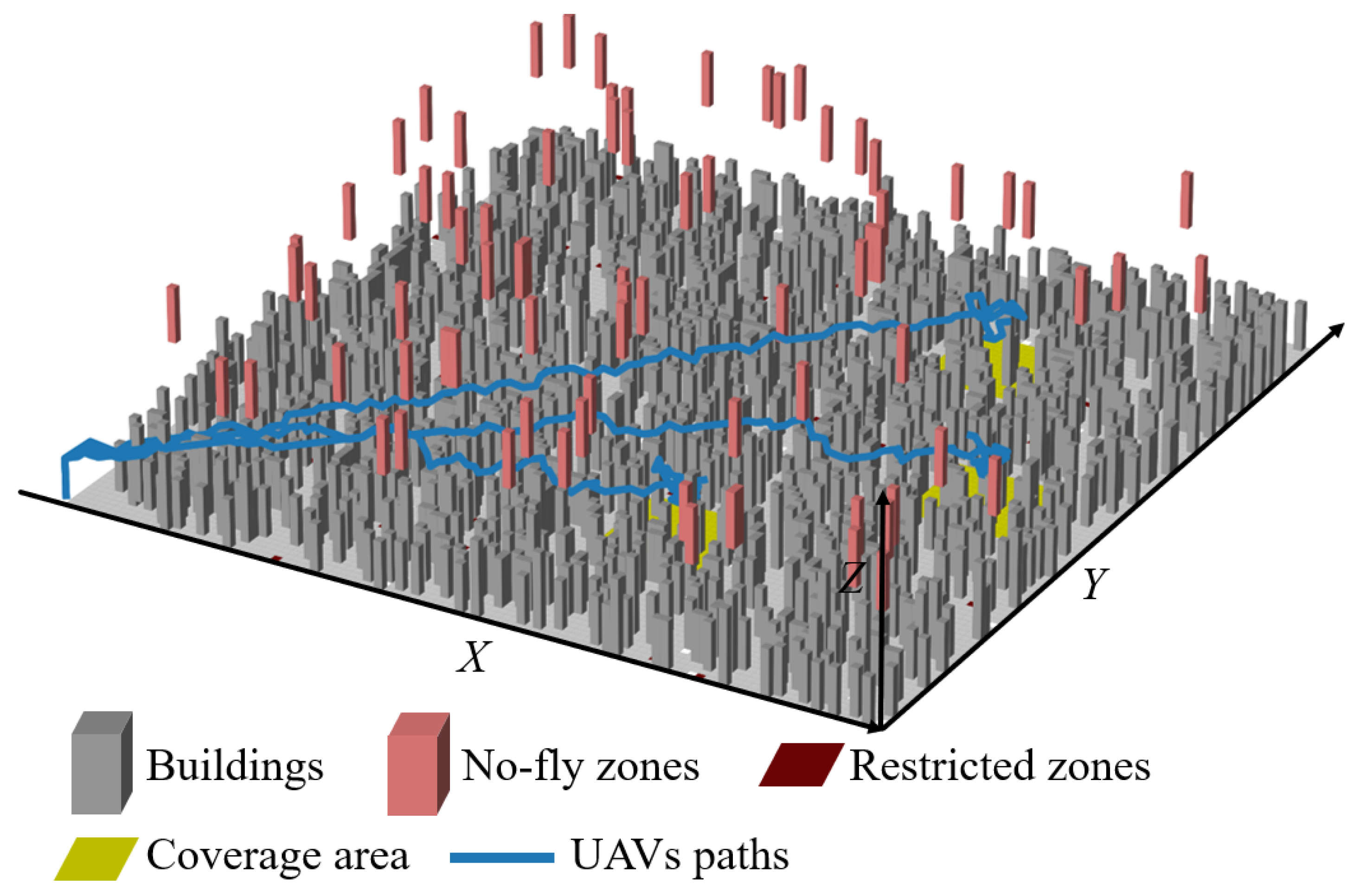
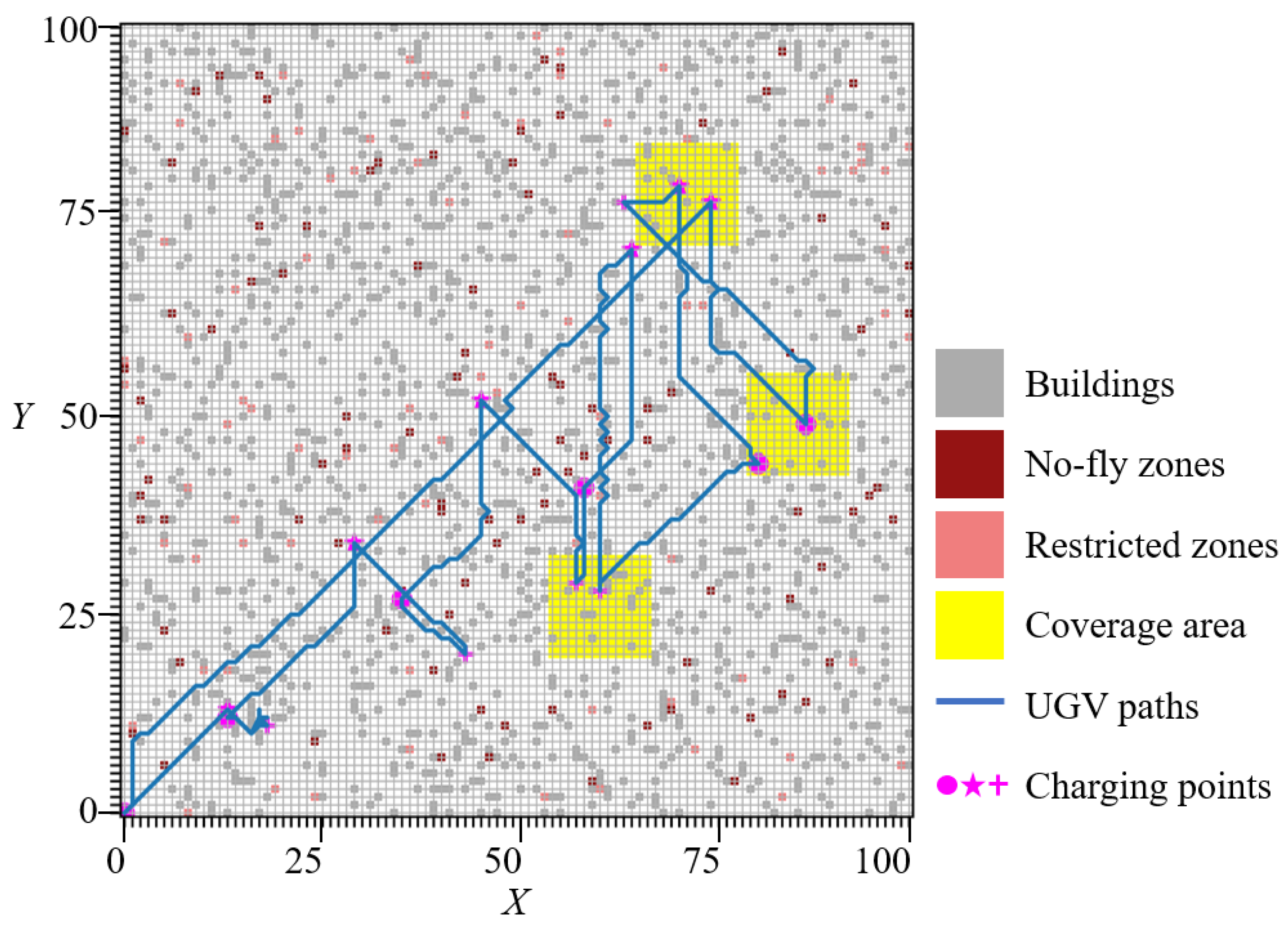
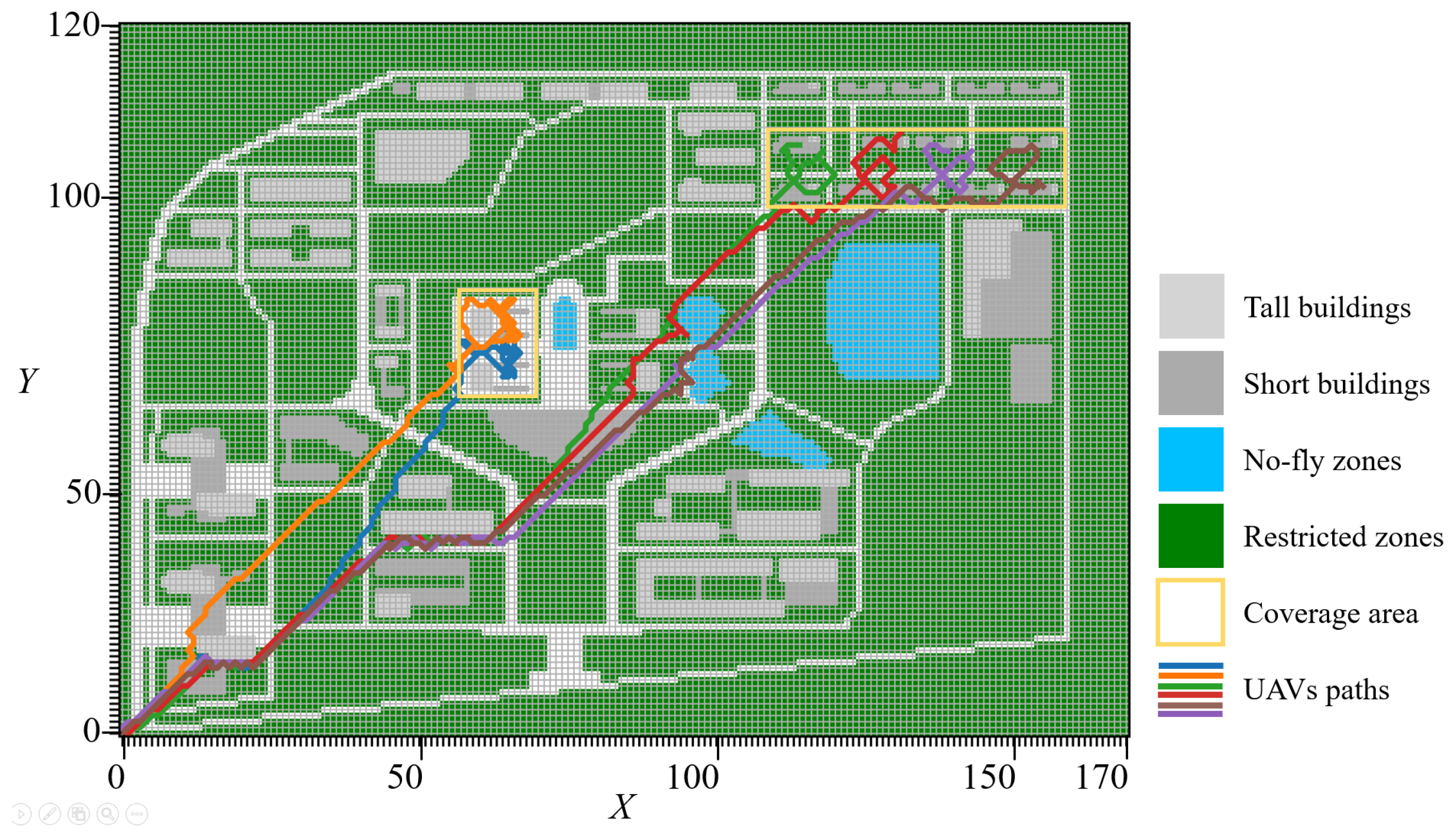
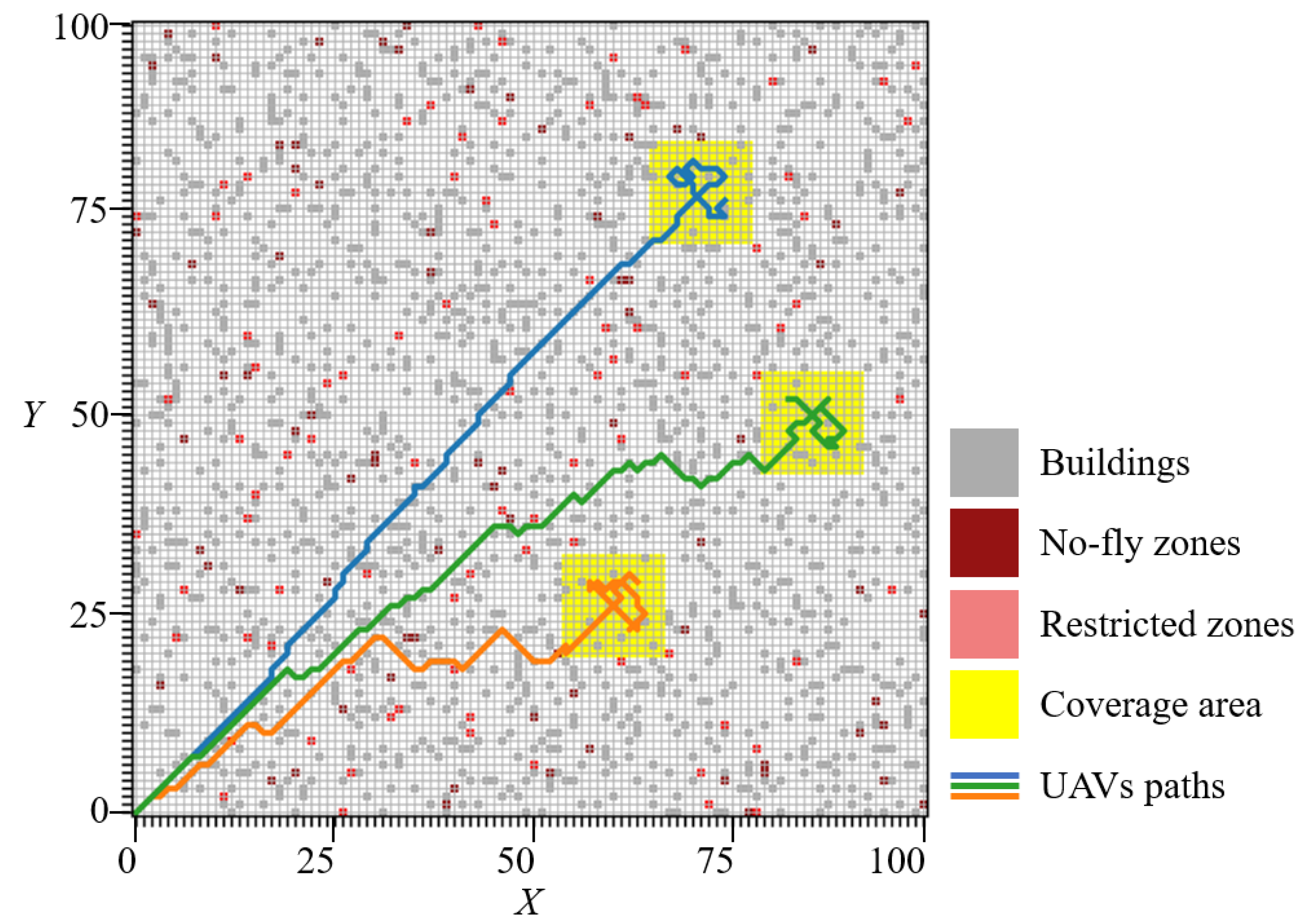
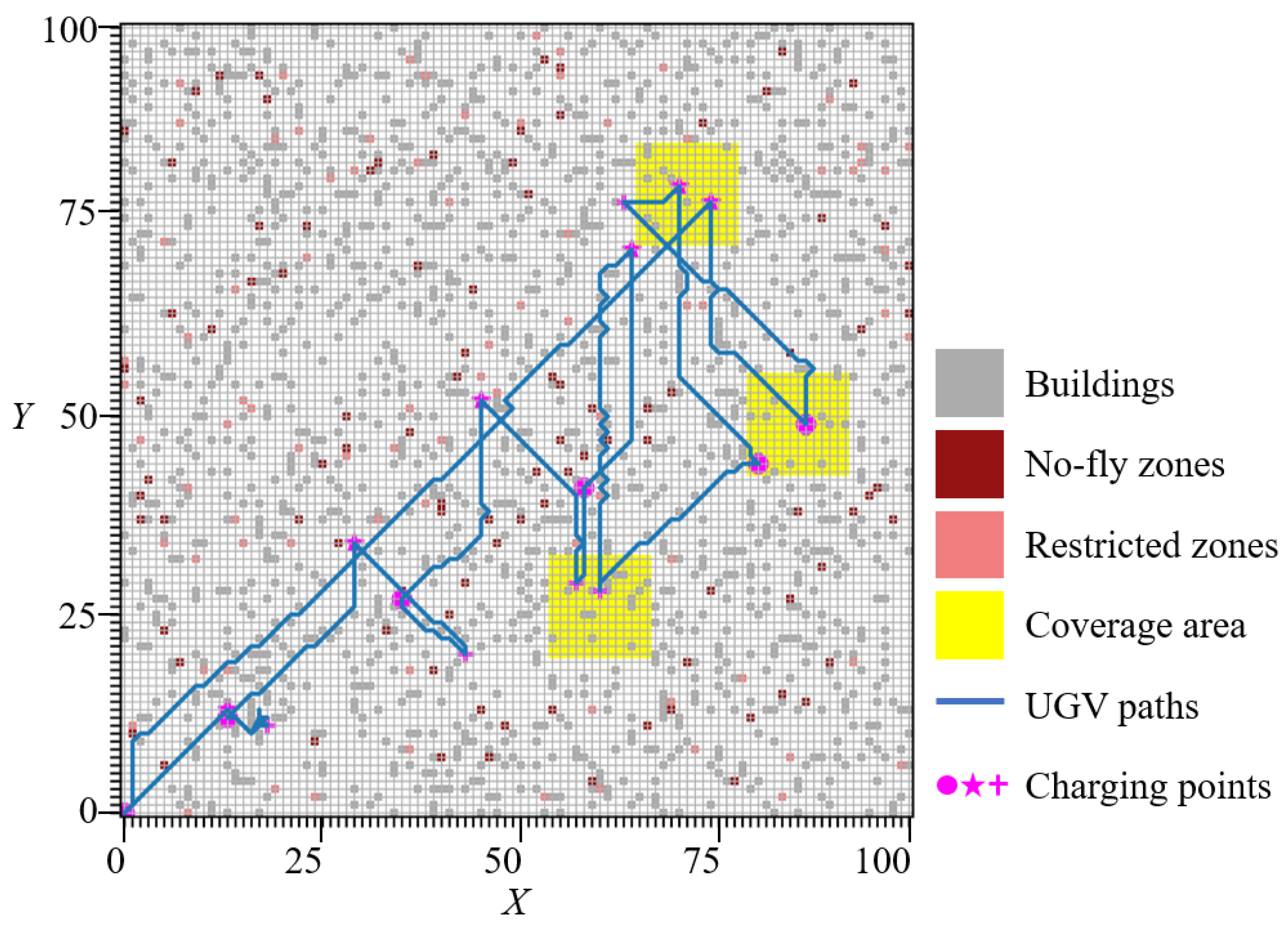
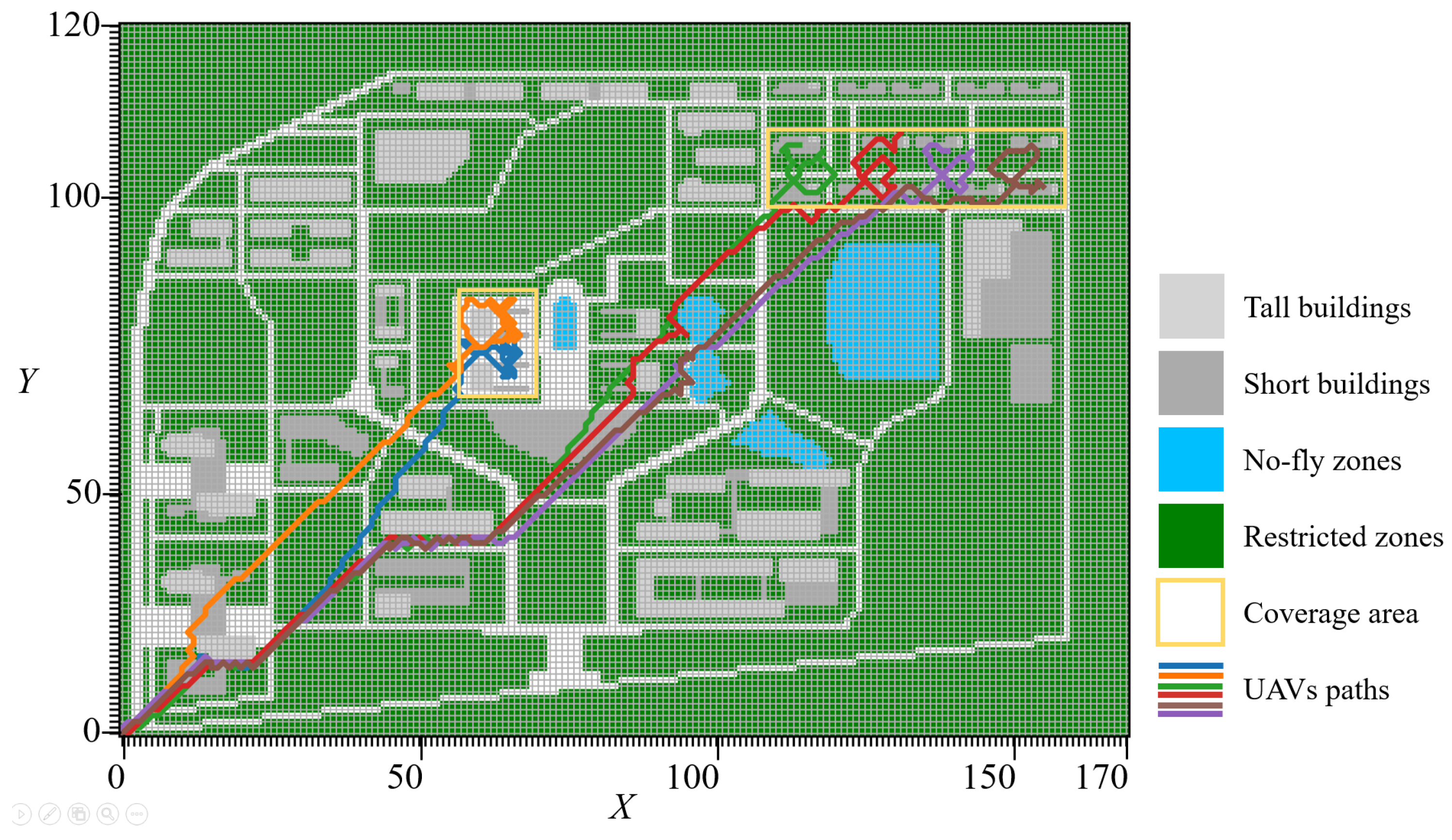
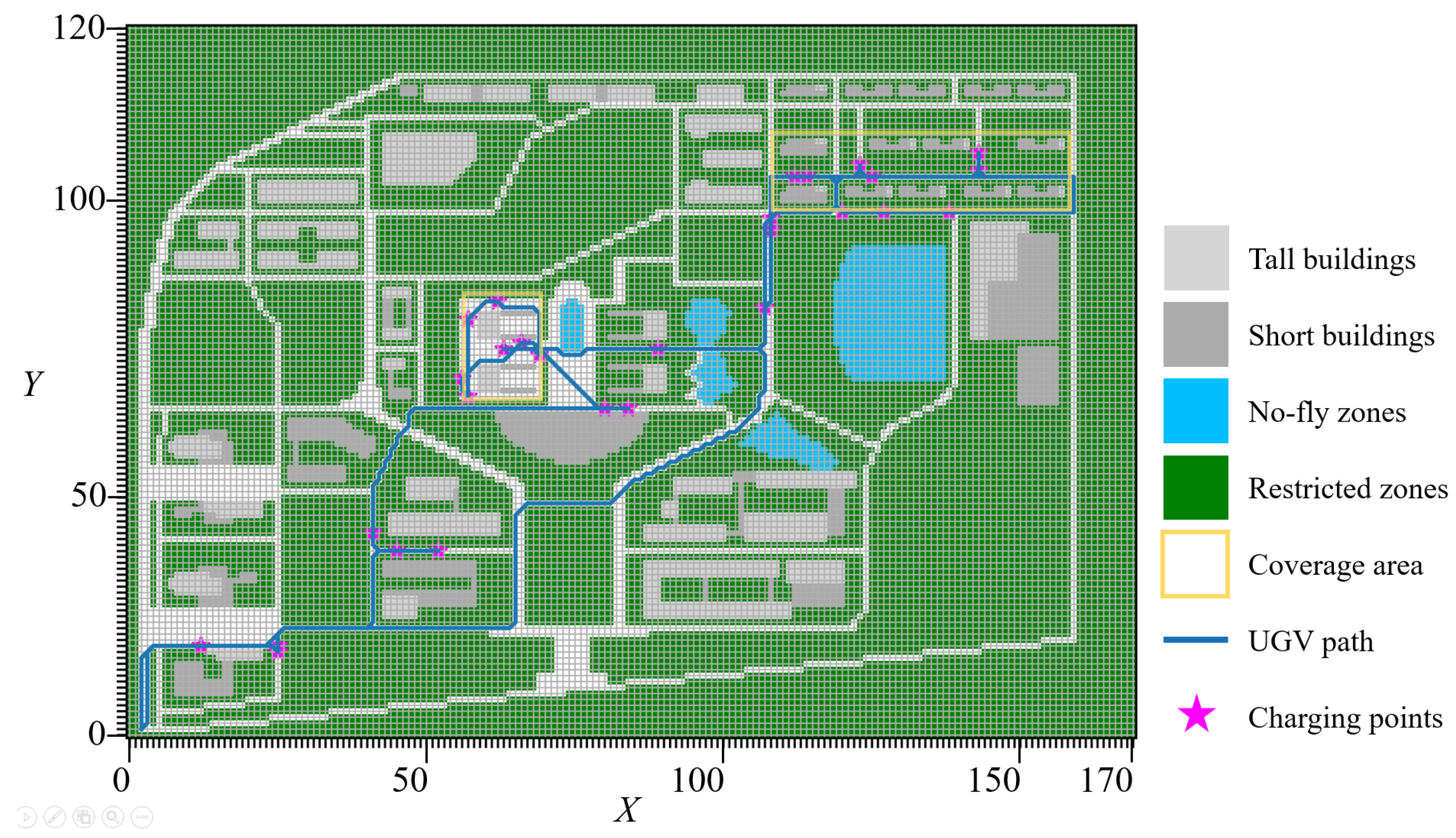
4.2. Simulation of UAVs and One UGV
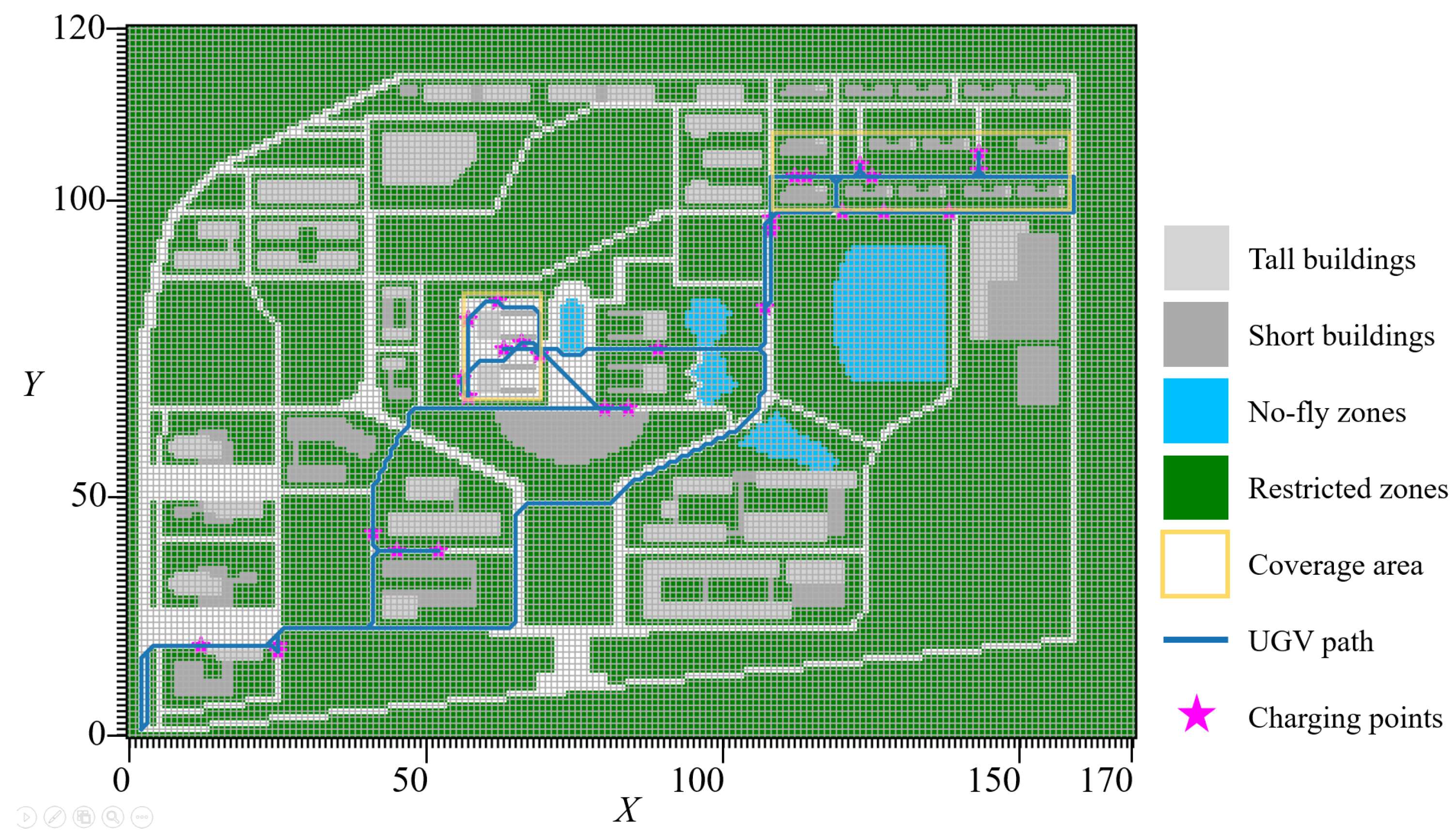
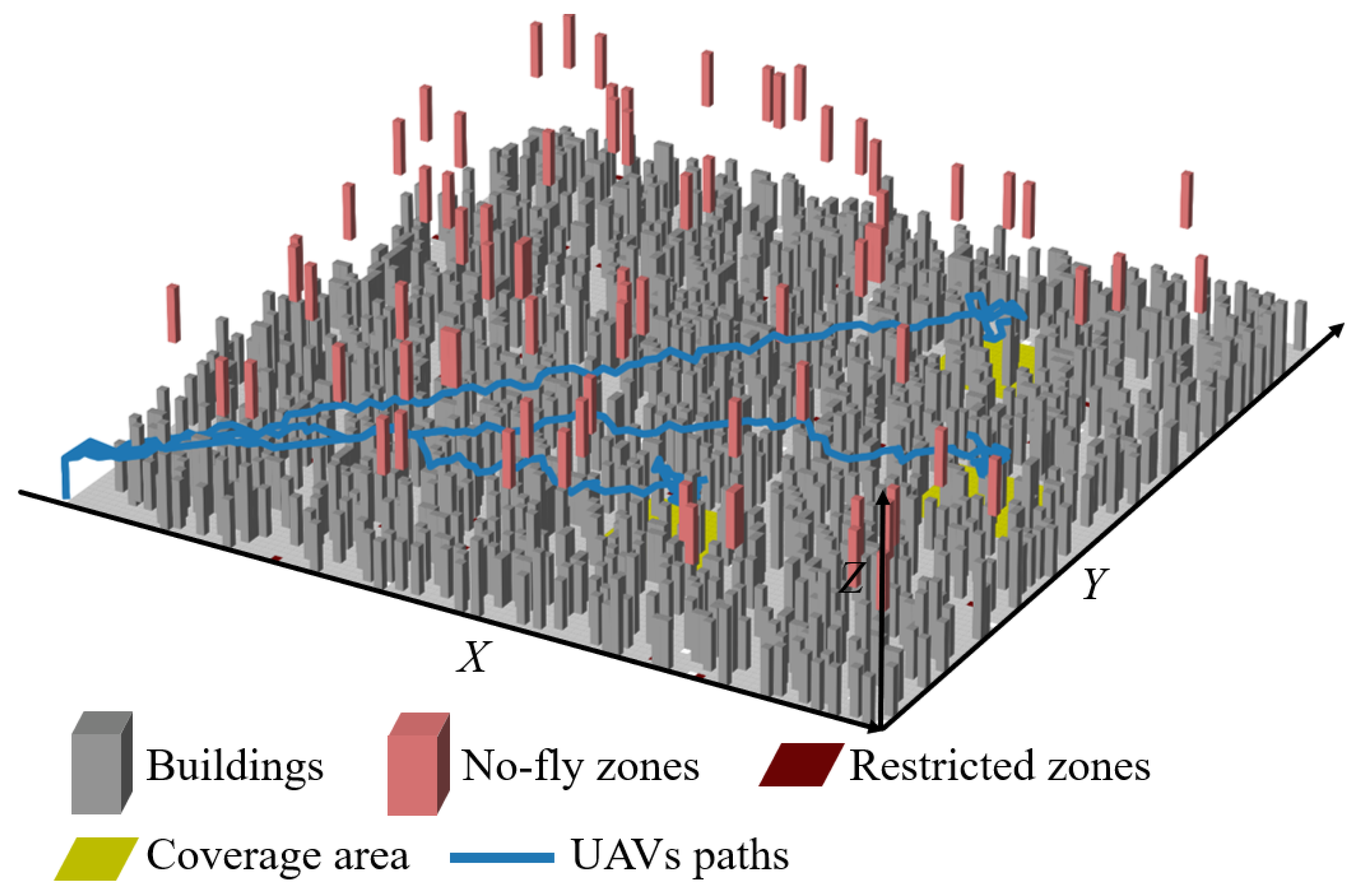
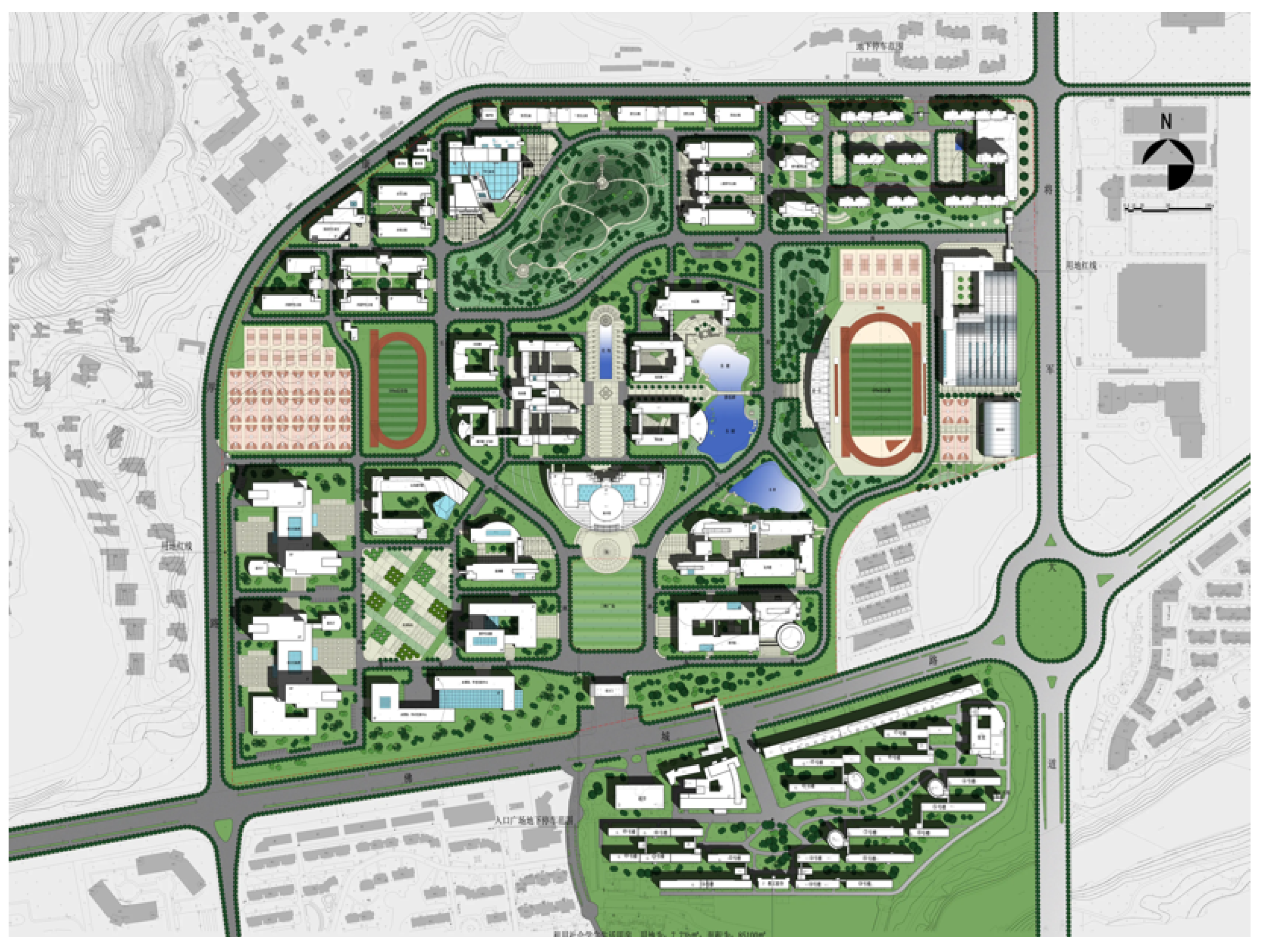
4.3. Simulation of Real-World Scenarios
5. Discussion
5.1. Feasibility and Effectiveness
5.2. Applicability in Real-World Scenarios
5.3. Summary
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Casper, J.; Murphy, R. Human-robot interactions during the robot assisted urban search and rescue response at the world trade center. IEEE Trans. Syst. Man Cybernetics. Part B Cybern. A Publ. IEEE Syst. Man Cybern. Soc. 2003, 33, 367–385. [Google Scholar] [CrossRef] [PubMed]
- Yin, C.; Xiao, Z.; Cao, X.; Xi, X.; Yang, P.; Wu, D. Offline and online search: UAV multiobjective path planning under dynamic urban environment. IEEE Internet Things J. 2018, 5, 546–558. [Google Scholar] [CrossRef]
- Cao, C.; Zhang, J.; Travers, M.; Choset, H. Hierarchical coverage path planning in complex 3d environments. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation, Paris, France, 31 May–31 August 2020; Volume 5, pp. 3206–3212. [Google Scholar]
- Chen, Y.; Yang, D.; Yu, J. Multi-UAV task assignment with parameter and time-sensitive uncertainties using modified two-part wolf pack search algorithm. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 2853–2872. [Google Scholar] [CrossRef]
- Li, L.; Gu, Q.; Liu, L. Research on path planning algorithm for multi-UAV maritime targets search based on genetic algorithm. In Proceedings of the 2020 IEEE International Conference on Information Technology, Big Data and Artificial Intelligence (ICIBA), Chongqing, China, 6–8 November 2020; pp. 840–843. [Google Scholar]
- Papaioannou, S.; Kolios, P.; Theocharides, T.; Panayiotou, C.G.; Polycarpou, M.M. Integrated ray-tracing and coverage planning control using reinforcement learning. In Proceedings of the 2022 IEEE 61st Conference on Decision and Control, Cancun, Mexico, 6–9 December 2022; pp. 7200–7207. [Google Scholar]
- Theile, M.; Bayerlein, H.; Nai, R.; Gesbert, D.; Caccamo, M. UAV coverage path planning under varying power constraints using deep reinforcement learning. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems, Las Vegas, NV, USA, 24 October 2020–24 January 2021; pp. 1444–1449. [Google Scholar]
- Tolstaya, E.; Paulos, J.; Kumar, V.; Ribeiro, A. Multi-robot coverage and exploration using spatial graph neural networks. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems, Prague, Czech Republic, 27 September–1 October 2021; pp. 8944–8950. [Google Scholar]
- Papaioannou, S.; Kolios, P.; Theocharides, T.; Panayiotou, C.G.; Polycarpou, M.M. Cooperative receding horizon 3D coverage control with a team of networked aerial agents. In Proceedings of the 2023 62nd IEEE Conference on Decision and Control, Singapore, 13–15 December 2023; pp. 4399–4404. [Google Scholar]
- Choi, Y.; Briceno, S.; Mavris, D.N. Energy-constrained multi-UAV coverage path planning for an aerial imagery mission using column generation. J. Intell. Robot. Syst. Theory Appl. 2020, 97, 125–139. [Google Scholar] [CrossRef]
- Papaioannou, S.; Kolios, P.; Theocharides, T.; Panayiotou, C.G.; Polycarpou, M.M. Distributed search planning in 3-D environments with a dynamically varying number of agents. IEEE Trans. Syst. Man Cybern. Syst. 2023, 53, 4117–4130. [Google Scholar] [CrossRef]
- Chen, J.; Du, C.; Zhang, Y.; Han, P.; Wei, W. A clustering-based coverage path planning method for autonomous heterogeneous UAVs. IEEE Trans. Intell. Transp. Syst. 2022, 23, 25546–25556. [Google Scholar] [CrossRef]
- Papaioannou, S.; Kolios, P.; Theocharides, T.; Panayiotou, C.G.; Polycarpou, M.M. Integrated guidance and gimbal control for coverage planning with visibility constraints. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 1276–1291. [Google Scholar] [CrossRef]
- Misra, S.; Biswas, S.; Minai, A.A.; Sharma, R. Cooperative search area optimization using multiple unmanned aerial vehicles in a GPS-denied environment. In Proceedings of the International Conference on Unmanned Aircraft Systems, Atlanta, GA, USA, 11–14 June 2019; pp. 580–587. [Google Scholar]
- Zhang, X.; Duan, H. An improved constrained differential evolution algorithm for unmanned aerial vehicle global route planning. Appl. Soft Comput. 2015, 26, 270–284. [Google Scholar] [CrossRef]
- Zhen, Z.; Chen, Y.; Wen, L.; Han, B. An intelligent cooperative mission planning scheme of UAV swarm in uncertain dynamic environment. Aerosp. Sci. Technol. 2020, 100, 105826. [Google Scholar] [CrossRef]
- Chen, J.; Ling, F.; Zhang, Y.; You, T.; Liu, Y.; Du, X. Coverage path planning of heterogeneous unmanned aerial vehicles based on ant colony system. Swarm Evol. Comput. 2022, 69, 101005. [Google Scholar] [CrossRef]
- Gao, L.; Han, Z.; Hong, D.; Zhang, B.; Chanussot, J. CyCU-Net: Cycle-consistency unmixing network by learning cascaded autoencoders. IEEE Trans. Geosci. Remote. Sens. 2022, 60, 5503914. [Google Scholar] [CrossRef]
- Gao, L.; Li, J.; Zheng, K.; Jia, X. Enhanced autoencoders with attention-embedded degradation learning for unsupervised hyperspectral image super-resolution. IEEE Trans. Geosci. Remote. Sens. 2023, 61, 5509417. [Google Scholar] [CrossRef]
- Su, Y.; Gao, L.; Jiang, M.; Plaza, A.; Sun, X.; Zhang, B. NSCKL: Normalized spectral clustering with kernel-based learning for semisupervised hyperspectral image classification. IEEE Trans. Cybern. 2023, 53, 6649–6662. [Google Scholar] [CrossRef] [PubMed]
- Yao, P.; Wang, H.; Ji, H. Multi-UAVs tracking target in urban environment by model predictive control and improved grey wolf optimizer. Aerosp. Sci. Technol. 2016, 55, 131–143. [Google Scholar] [CrossRef]
- Riehl, J.R.; Collins, G.E.; Hespanha, J.P. Cooperative search by UAV teams: A model predictive approach using dynamic graphs. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 2637–2656. [Google Scholar] [CrossRef]
- Huang, L.; Qu, H.; Ji, P.; Liu, X.; Fan, Z. A novel coordinated path planning method using k-degree smoothing for multi-UAVs. Appl. Soft Comput. 2016, 48, 182–192. [Google Scholar] [CrossRef]
- Wu, Y.; Wu, S.; Hu, X. Cooperative path planning of UAVs & UGVs for a persistent surveillance task in urban environments. IEEE Internet Things J. 2021, 8, 4906–4919. [Google Scholar]
- Wang, J.; Wu, Z.; Yan, S.; Tan, M.; Yu, J. Real-time path planning and following of a gliding robotic dolphin within a hierarchical framework. IEEE Trans. Veh. Technol. 2021, 70, 3243–3255. [Google Scholar] [CrossRef]
- Wu, N.; Chacon, C.; Hakl, Z.; Petty, K.; Smith, D. Design and implementation of an unmanned aerial and ground vehicle recharging system. In Proceedings of the 2019 IEEE National Aerospace and Electronics Conference (NAECON), Dayton, OH, USA, 15–19 July 2019. [Google Scholar]
- Grocholsky, B.; Keller, J.; Kumar, V.; Pappas, G. Cooperative air and ground surveillance. IEEE Robot. Autom. Mag. 2006, 13, 16–25. [Google Scholar] [CrossRef]
- Minaeian, S.; Liu, J.; Son, Y.J. Vision-Based Target Detection and Localization via a Team of Cooperative UAV and UGVs. IEEE Trans. Syst. Man Cybern. Syst. 2016, 46, 1005–1016. [Google Scholar] [CrossRef]
- Ghamry, K.A.; Kamel, M.A.; Zhang, Y. Cooperative forest monitoring and fire detection using a team of UAVs-UGVs. In Proceedings of the International Conference on Unmanned Aircraft Systems, Arlington, VA, USA, 7–10 June 2016. [Google Scholar]
- Qin, H.; Meng, Z.; Meng, W.; Chen, X.; Sun, H.; Lin, F.; Ang, M.H. Autonomous exploration and mapping system using heterogeneous UAVs and UGVs in GPS-denied environments. IEEE Trans. Veh. Technol. 2018, 68, 1339–1350. [Google Scholar] [CrossRef]
- Lakas, A.; Belkhouche, B.; Benkraouda, O.; Shuaib, A.; Alasmawi, H.J. A framework for a cooperative UAV-UGV system for path discovery and planning. In Proceedings of the 2018 International Conference on Innovations in Information Technology (IIT), Al Ain, United Arab Emirates, 18–19 November 2018. [Google Scholar]
- Asadi, K.; Suresh, A.K.; Ender, A.; Gotad, S.; Maniyar, S.; An, S.; Noghabaei, M.; Han, K.; Lobaton, E.; Wu, T. An integrated UGV-UAV system for construction site data collection. Autom. Constr. 2020, 112, 103068. [Google Scholar] [CrossRef]
- Wei, Y.; Qiu, H.; Liu, Y.; Du, J.; Pun, M.O. Unmanned aerial vehicle (UAV)-assisted unmanned ground vehicle (UGV) systems design, implementation and optimization. In Proceedings of the 2017 3rd IEEE International Conference on Computer and Communications (ICCC), Chengdu, China, 13–16 December 2017. [Google Scholar]
- Li, J.; Deng, G.; Luo, C.; Lin, Q.; Yan, Q.; Ming, Z. A hybrid path planning method in unmanned air/ground vehicle (UAV/UGV) cooperative systems. IEEE Trans. Veh. Technol. 2016, 65, 9585–9596. [Google Scholar] [CrossRef]
- Li, J.; Sun, T.; Huang, X.; Ma, L.; Lin, Q.; Chen, J.; Leung, V.C. A memetic path planning algorithm for unmanned air/ground vehicle cooperative detection systems. IEEE Trans. Autom. Sci. Eng. 2021, 99, 1–14. [Google Scholar] [CrossRef]
- Yu, W.; Liu, J.; Zhou, J. A novel sparrow particle swarm algorithm (SPSA) for unmanned aerial vehicle path planning. Sci. Program. 2021, 2021, 5158304. [Google Scholar] [CrossRef]
- Niu, G.; Yang, Q.; Gao, Y.; Pun, M.O. Vision-based autonomous landing for unmanned aerial and ground vehicles cooperative systems. IEEE Robot. Autom. Lett. 2022, 3, 6234–6241. [Google Scholar] [CrossRef]
- Ropero, F.; Muñoz, P.; R-Moreno, M.D. TERRA: A path planning algorithm for cooperative UGV–UAV exploration. Eng. Appl. Artif. Intell. 2019, 78, 260–272. [Google Scholar] [CrossRef]
- Zheng, J.; Ding, M.; Sun, L.; Liu, H. Distributed stochastic algorithm based on enhanced genetic algorithm for path planning of multi-UAV cooperative area search. IEEE Trans. Intell. Transp. Syst. 2023, 24, 8290–8303. [Google Scholar] [CrossRef]
- Zhong, M.; Cassandras, C.G. Distributed coverage control and data collection with mobile sensor networks. IEEE Trans. Autom. Control 2011, 56, 2445–2455. [Google Scholar] [CrossRef]
- Hu, J.; Xie, L.; Lum, K.Y.; Xu, J. Multi-agent information fusion and cooperative control in target search. EEE Trans. Control Syst. Technol. 2013, 21, 1223–1235. [Google Scholar] [CrossRef]
- Xiao, L.; Boyd, S.; Lall, S. A scheme for robust distributed sensor fusion based on average consensus In Proceedings of the IPSN 2005. Fourth International Symposium on Information Processing in Sensor Networks on 2005, Boise, ID, USA, 15 April 2005; pp. 63–70. [Google Scholar]
- Gao, L.; Wang, Z.; Zhuang, L.; Yu, H.; Zhang, B.; Chanussot, J. Using low-rank representation of abundance maps and nonnegative tensor factorization for hyperspectral nonlinear unmixing. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5504017. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| 2000 m × 2000 m × 100 m | |
| 20 m × 20 m × 10 m | |
| 100 m | |
| 60 m | |
| 90 m | |
| 60 m | |
| 2 | |
| 2s | |
| 1 | |
| P | 200 |
| T | 500 |
| 5000 |
| Coverage Area | Vertices |
|---|---|
| Coverage area 1 | (1300 m,1420 m) |
| (1540 m,1660 m) | |
| (1540 m,1420 m) | |
| (1300 m,1660 m) | |
| Coverage area 2 | (1080 m,680 m) |
| (1320 m,680 m) | |
| (1080 m,440 m) | |
| (1320 m,440 m) | |
| Coverage area 3 | (1620 m,1120 m) |
| (1620 m,900 m) | |
| (1880 m,1120 m) | |
| (1880 m,900 m) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, S.; Zhou, Z.; Liu, H.; Zhang, X.; Li, J.; Gao, H. A Path Planning Method for Collaborative Coverage Monitoring in Urban Scenarios. Remote Sens. 2024, 16, 1152. https://doi.org/10.3390/rs16071152
Xu S, Zhou Z, Liu H, Zhang X, Li J, Gao H. A Path Planning Method for Collaborative Coverage Monitoring in Urban Scenarios. Remote Sensing. 2024; 16(7):1152. https://doi.org/10.3390/rs16071152
Chicago/Turabian StyleXu, Shufang, Ziyun Zhou, Haiyun Liu, Xuejie Zhang, Jianni Li, and Hongmin Gao. 2024. "A Path Planning Method for Collaborative Coverage Monitoring in Urban Scenarios" Remote Sensing 16, no. 7: 1152. https://doi.org/10.3390/rs16071152
APA StyleXu, S., Zhou, Z., Liu, H., Zhang, X., Li, J., & Gao, H. (2024). A Path Planning Method for Collaborative Coverage Monitoring in Urban Scenarios. Remote Sensing, 16(7), 1152. https://doi.org/10.3390/rs16071152