
The Amazon’s 2023 Drought: Sentinel-1 Reveals Extreme Rio Negro River Contraction
 , ,
, , 
Abstract
1. Introduction
2. Materials and Methods
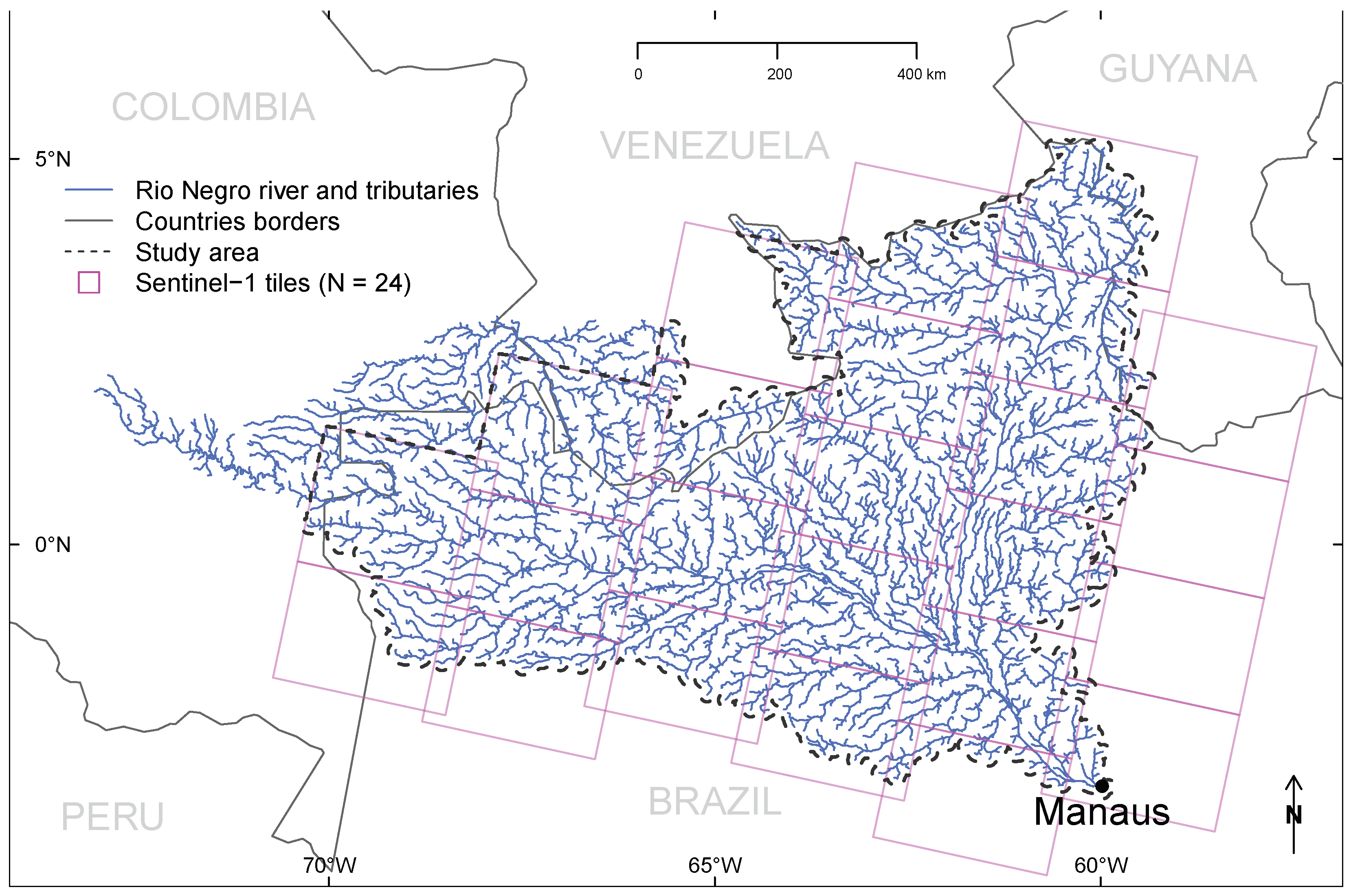
2.1. Study Site
2.2. Sentinel-1 Satellite Images of the Rio Negro Basin
2.3. Sentinel-1 Mountain Shade Mask from SRTM
2.4. High-Resolution Water Masks and Water Levels
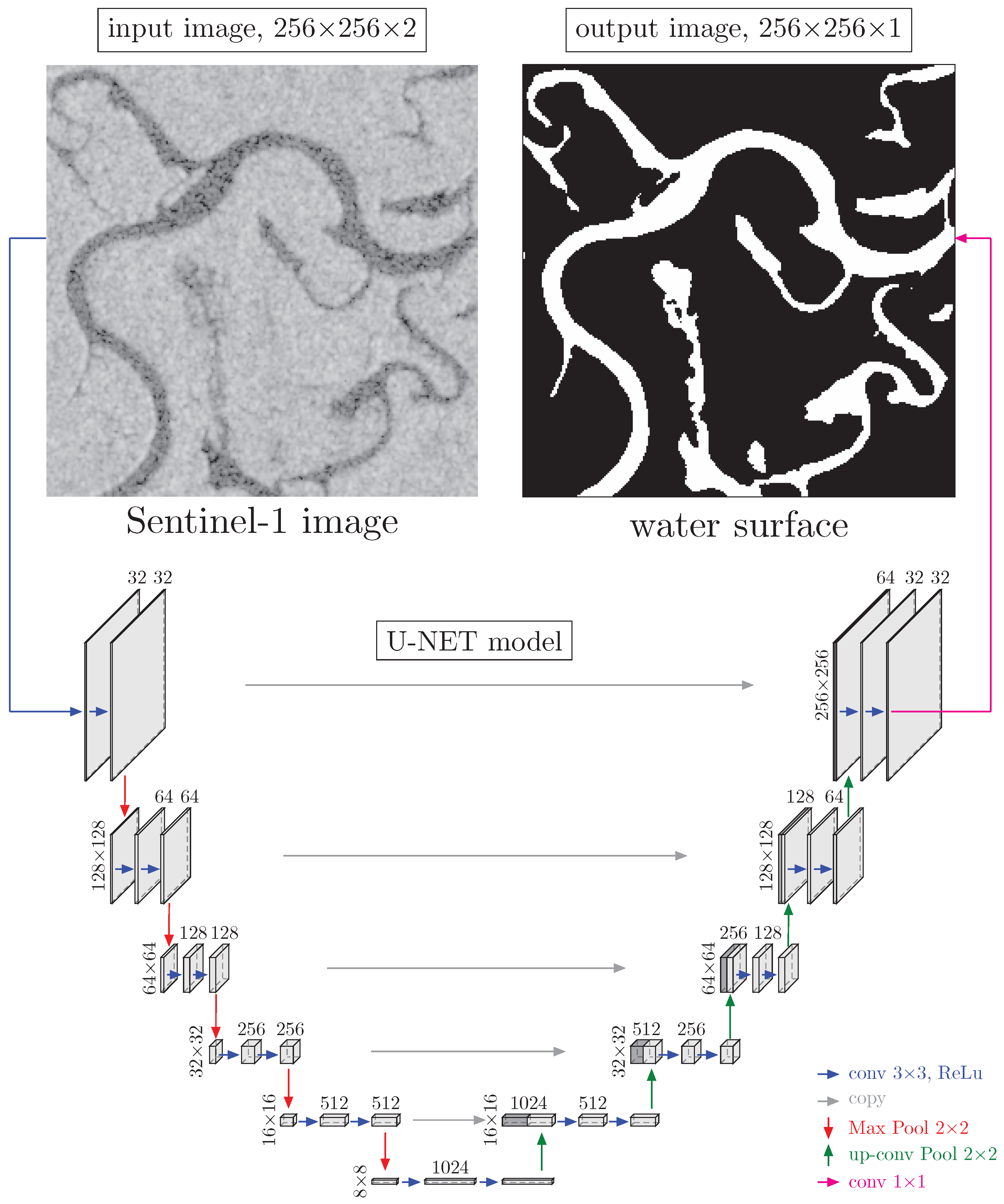
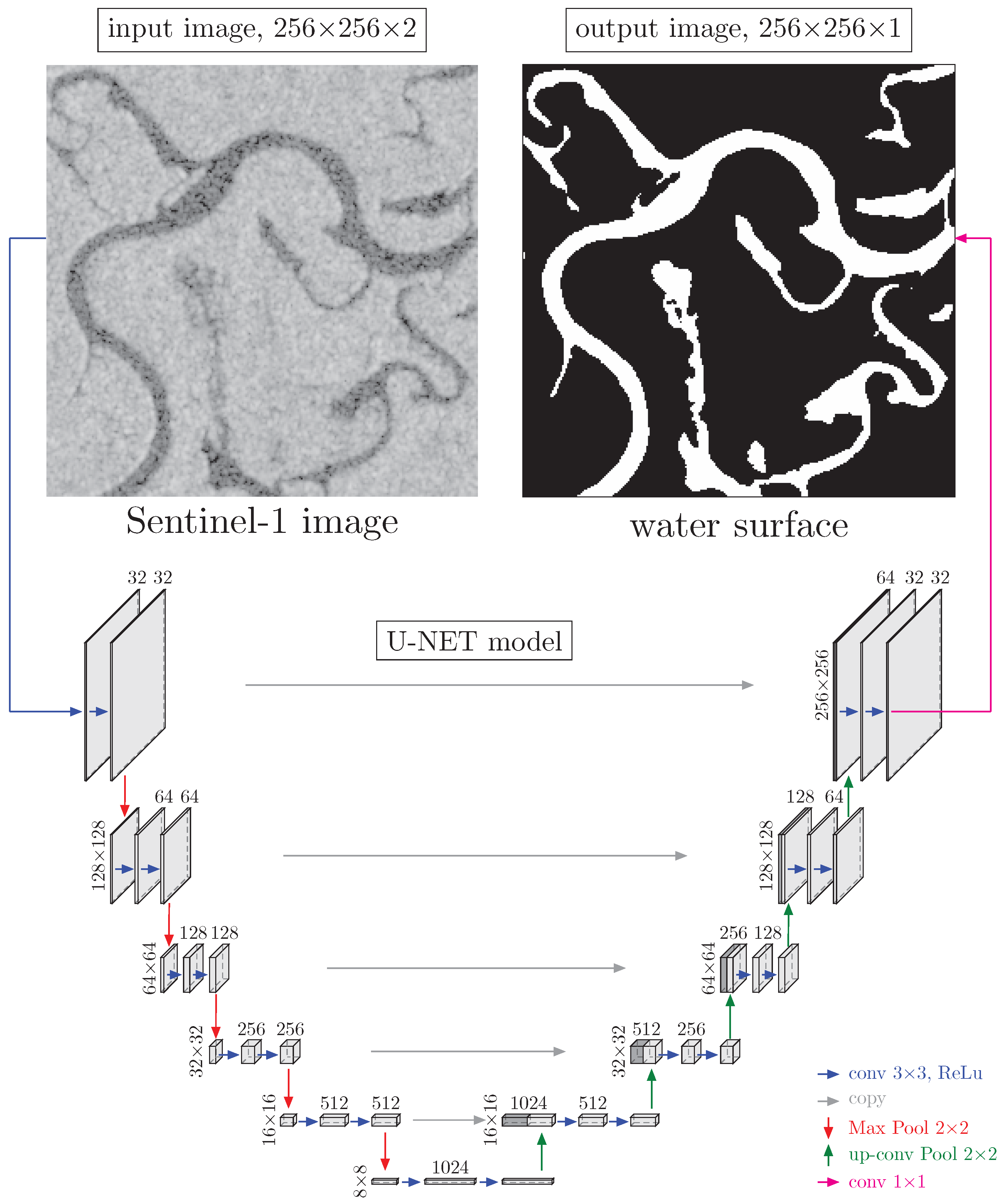
2.5. Model Architecture
2.6. Network Training
2.7. Prediction
2.8. Filtering for Artifacts in Sentinel-1 Images
2.9. Segmentation Accuracy Assessment
3. Results
3.1. Model Accuracy
3.2. LBA-ECO LC-07 Wetland Dataset
3.3. Comparison with MapBiomas Water Initiative Data—Year 2022
3.4. Comparison with Global Water Surface (JRC)—Period 1984–2015
3.5. Regional Results and 2023 Drought at 10 m Spatial Resolution
4. Discussion
4.1. Mapping Water Surface of the Rio Negro River and Perspectives
4.2. Limitations of the Water Surface Model
4.3. Water Surface Segmentation Model Application on Larger Scale
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Alho, C.J.; Reis, R.E.; Aquino, P.P. Amazonian freshwater habitats experiencing environmental and socioeconomic threats affecting subsistence fisheries. Ambio 2015, 44, 412–425. [Google Scholar] [CrossRef]
- Filizola, N.; Spínola, N.; Arruda, W.; Seyler, F.; Calmant, S.; Silva, J. The Rio Negro and Rio Solimões confluence point–hydrometric observations during the 2006/2007 cycle. In River, Coastal and Estuarine Morphodynamics: RCEM; Taylor & Francis Group: London, UK, 2009; pp. 1003–1006. [Google Scholar]
- Fassoni-Andrade, A.C.; Fleischmann, A.S.; Papa, F.; Paiva, R.C.D.D.; Wongchuig, S.; Melack, J.M.; Moreira, A.A.; Paris, A.; Ruhoff, A.; Barbosa, C.; et al. Amazon hydrology from space: Scientific advances and future challenges. Rev. Geophys. 2021, 59, e2020RG000728. [Google Scholar] [CrossRef]
- Pekel, J.F.; Cottam, A.; Gorelick, N.; Belward, A.S. High-resolution mapping of global surface water and its long-term changes. Nature 2016, 540, 418–422. [Google Scholar] [CrossRef]
- Hess, L.; Melack, J.; Affonso, A.; Barbosa, C.; Gastil-Buhl, M.; Novo, E. LBA-ECO LC-07 Wetland Extent, Vegetation, and Inundation: Lowland Amazon Basin. ORNL DAAC. 2015. Available online: http://dx.doi.org/10.3334/ORNLDAAC/1284 (accessed on 13 January 2024).
- MapBiomas. Project MapBiomas, Collection 8.0 of Brazilian Land Cover & Use Map Series; Technical Report; MapBiomas. 2024. Available online: https://brasil.mapbiomas.org/colecoes-mapbiomas/ (accessed on 13 January 2024).
- Souza, C.M.; Kirchhoff, F.T.; Oliveira, B.C.; Ribeiro, J.G.; Sales, M.H. Long-Term Annual Surface Water Change in the Brazilian Amazon Biome: Potential Links with Deforestation, Infrastructure Development and Climate Change. Water 2019, 11, 566. [Google Scholar] [CrossRef]
- Adeli, S.; Salehi, B.; Mahdianpari, M.; Quackenbush, L.J.; Brisco, B.; Tamiminia, H.; Shaw, S. Wetland Monitoring Using SAR Data: A Meta-Analysis and Comprehensive Review. Remote Sens. 2020, 12, 2190. [Google Scholar] [CrossRef]
- Hess, L.L.; Melack, J.M.; Filoso, S.; Wang, Y. Delineation of inundated area and vegetation along the Amazon floodplain with the SIR-C synthetic aperture radar. IEEE Trans. Geosci. Remote Sens. 1995, 33, 896–904. [Google Scholar] [CrossRef]
- Alsdorf, D.E.; Melack, J.M.; Dunne, T.; Mertes, L.A.; Hess, L.L.; Smith, L.C. Interferometric radar measurements of water level changes on the Amazon flood plain. Nature 2000, 404, 174–177. [Google Scholar] [CrossRef]
- Silva, T.S.; Costa, M.P.; Melack, J.M.; Novo, E.M. Remote sensing of aquatic vegetation: Theory and applications. Environ. Monit. Assess. 2008, 140, 131–145. [Google Scholar] [CrossRef] [PubMed]
- Sartori, L.R.; Imai, N.N.; Mura, J.C.; de Moraes Novo, E.M.L.; Silva, T.S.F. Mapping macrophyte species in the Amazon floodplain wetlands using fully polarimetric ALOS/PALSAR data. IEEE Trans. Geosci. Remote Sens. 2011, 49, 4717–4728. [Google Scholar] [CrossRef]
- Da Silva, J.S.; Seyler, F.; Calmant, S.; Rotunno Filho, O.C.; Roux, E.; Araújo, A.A.M.; Guyot, J.L. Water level dynamics of Amazon wetlands at the watershed scale by satellite altimetry. Int. J. Remote Sens. 2012, 33, 3323–3353. [Google Scholar] [CrossRef]
- Arnesen, A.S.; Silva, T.S.; Hess, L.L.; Novo, E.M.; Rudorff, C.M.; Chapman, B.D.; McDonald, K.C. Monitoring flood extent in the lower Amazon River floodplain using ALOS/PALSAR ScanSAR images. Remote Sens. Environ. 2013, 130, 51–61. [Google Scholar] [CrossRef]
- De Almeida Furtado, L.F.; Silva, T.S.F.; de Moraes Novo, E.M.L. Dual-season and full-polarimetric C band SAR assessment for vegetation mapping in the Amazon várzea wetlands. Remote Sens. Environ. 2016, 174, 212–222. [Google Scholar] [CrossRef]
- Cao, N.; Lee, H.; Jung, H.C.; Yu, H. Estimation of water level changes of large-scale Amazon wetlands using ALOS2 ScanSAR differential interferometry. Remote Sens. 2018, 10, 966. [Google Scholar] [CrossRef]
- Canisius, F.; Brisco, B.; Murnaghan, K.; Van Der Kooij, M.; Keizer, E. SAR backscatter and InSAR coherence for monitoring wetland extent, flood pulse and vegetation: A study of the Amazon lowland. Remote Sens. 2019, 11, 720. [Google Scholar] [CrossRef]
- Gao, B.C. NDWI—A normalized difference water index for remote sensing of vegetation liquid water from space. Remote Sens. Environ. 1996, 58, 257–266. [Google Scholar] [CrossRef]
- Huang, W.; DeVries, B.; Huang, C.; Lang, M.W.; Jones, J.W.; Creed, I.F.; Carroll, M.L. Automated extraction of surface water extent from Sentinel-1 data. Remote Sens. 2018, 10, 797. [Google Scholar] [CrossRef]
- Huang, Z.; Wu, W.; Liu, H.; Zhang, W.; Hu, J. Identifying Dynamic Changes in Water Surface Using Sentinel-1 Data Based on Genetic Algorithm and Machine Learning Techniques. Remote Sens. 2021, 13, 3745. [Google Scholar] [CrossRef]
- Tang, H.; Lu, S.; Ali Baig, M.H.; Li, M.; Fang, C.; Wang, Y. Large-Scale Surface Water Mapping Based on Landsat and Sentinel-1 Images. Water 2022, 14, 1454. [Google Scholar] [CrossRef]
- Bioresita, F.; Puissant, A.; Stumpf, A.; Malet, J.P. A Method for Automatic and Rapid Mapping of Water Surfaces from Sentinel-1 Imagery. Remote Sens. 2018, 10, 217. [Google Scholar] [CrossRef]
- Xing, L.; Tang, X.; Wang, H.; Fan, W.; Wang, G. Monitoring monthly surface water dynamics of Dongting Lake using Sentinel-1 data at 10 m. PeerJ 2018, 6, e4992. [Google Scholar] [CrossRef] [PubMed]
- Uddin, K.; Matin, M.A.; Meyer, F.J. Operational flood mapping using multi-temporal Sentinel-1 SAR images: A case study from Bangladesh. Remote Sens. 2019, 11, 1581. [Google Scholar] [CrossRef]
- Tiwari, V.; Kumar, V.; Matin, M.A.; Thapa, A.; Ellenburg, W.L.; Gupta, N.; Thapa, S. Flood inundation mapping-Kerala 2018; Harnessing the power of SAR, automatic threshold detection method and Google Earth Engine. PLoS ONE 2020, 15, e0237324. [Google Scholar] [CrossRef]
- Markert, K.N.; Markert, A.M.; Mayer, T.; Nauman, C.; Haag, A.; Poortinga, A.; Bhandari, B.; Thwal, N.S.; Kunlamai, T.; Chishtie, F.; et al. Comparing sentinel-1 surface water mapping algorithms and radiometric terrain correction processing in southeast asia utilizing google earth engine. Remote Sens. 2020, 12, 2469. [Google Scholar] [CrossRef]
- Pham-Duc, B.; Prigent, C.; Aires, F. Surface Water Monitoring within Cambodia and the Vietnamese Mekong Delta over a Year, with Sentinel-1 SAR Observations. Water 2017, 9, 366. [Google Scholar] [CrossRef]
- Mayer, T.; Poortinga, A.; Bhandari, B.; Nicolau, A.P.; Markert, K.; Thwal, N.S.; Markert, A.; Haag, A.; Kilbride, J.; Chishtie, F.; et al. Deep learning approach for Sentinel-1 surface water mapping leveraging Google Earth Engine. ISPRS Open J. Photogramm. Remote Sens. 2021, 2, 100005. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation. arXiv 2015, arXiv:1505.04597. [Google Scholar]
- Bonafilia, D.; Tellman, B.; Anderson, T.; Issenberg, E. Sen1Floods11: A georeferenced dataset to train and test deep learning flood algorithms for sentinel-1. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops, Seattle, WA, USA, 14–19 June 2020; pp. 210–211. [Google Scholar]
- Konapala, G.; Kumar, S.V.; Ahmad, S.K. Exploring Sentinel-1 and Sentinel-2 diversity for flood inundation mapping using deep learning. ISPRS J. Photogramm. Remote Sens. 2021, 180, 163–173. [Google Scholar] [CrossRef]
- Nemni, E.; Bullock, J.; Belabbes, S.; Bromley, L. Fully convolutional neural network for rapid flood segmentation in synthetic aperture radar imagery. Remote Sens. 2020, 12, 2532. [Google Scholar] [CrossRef]
- Katiyar, V.; Tamkuan, N.; Nagai, M. Near-Real-Time Flood Mapping Using Off-the-Shelf Models with SAR Imagery and Deep Learning. Remote Sens. 2021, 13, 2334. [Google Scholar] [CrossRef]
- Gorelick, N.; Hancher, M.; Dixon, M.; Ilyushchenko, S.; Thau, D.; Moore, R. Google Earth Engine: Planetary-scale geospatial analysis for everyone. Remote Sens. Environ. 2017, 202, 18–27. [Google Scholar] [CrossRef]
- Hess, L.L.; Melack, J.M.; Novo, E.M.; Barbosa, C.C.; Gastil, M. Dual-season mapping of wetland inundation and vegetation for the central Amazon basin. Remote Sens. Environ. 2003, 87, 404–428. [Google Scholar] [CrossRef]
- Souza, C.M.; Z Shimbo, J.; Rosa, M.R.; Parente, L.L.; A Alencar, A.; Rudorff, B.F.; Hasenack, H.; Matsumoto, M.; G Ferreira, L.; Souza-Filho, P.W.; et al. Reconstructing three decades of land use and land cover changes in brazilian biomes with landsat archive and earth engine. Remote Sens. 2020, 12, 2735. [Google Scholar] [CrossRef]
- Meade, R.H.; Rayol, J.M.; Da Conceicão, S.C.; Natividade, J.R. Backwater effects in the Amazon River basin of Brazil. Environ. Geol. Water Sci. 1991, 18, 105–114. [Google Scholar] [CrossRef]
- Frappart, F.; Papa, F.; Famiglietti, J.S.; Prigent, C.; Rossow, W.B.; Seyler, F. Interannual variations of river water storage from a multiple satellite approach: A case study for the Rio Negro River basin. J. Geophys. Res. Atmos. 2008, 113. [Google Scholar] [CrossRef]
- Marinho, R.R.; Filizola Junior, N.P.; Cremon, É.H. Analysis of suspended sediment in the Anavilhanas archipelago, Rio Negro, Amazon Basin. Water 2020, 12, 1073. [Google Scholar] [CrossRef]
- Moreira-Turcq, P.; Seyler, P.; Guyot, J.L.; Etcheber, H. Exportation of organic carbon from the Amazon River and its main tributaries. Hydrol. Process. 2003, 17, 1329–1344. [Google Scholar] [CrossRef]
- Liebmann, B.; Marengo, J. Interannual variability of the rainy season and rainfall in the Brazilian Amazon Basin. J. Clim. 2001, 14, 4308–4318. [Google Scholar] [CrossRef]
- Marengo, J.A.; Liebmann, B.; Kousky, V.E.; Filizola, N.P.; Wainer, I.C. Onset and end of the rainy season in the Brazilian Amazon Basin. J. Clim. 2001, 14, 833–852. [Google Scholar] [CrossRef]
- FAO. Rivers of South America; Technical Report; FAO: Rome, Italy, 2022. [Google Scholar]
- Farr, T.G.; Rosen, P.A.; Caro, E.; Crippen, R.; Duren, R.; Hensley, S.; Kobrick, M.; Paller, M.; Rodriguez, E.; Roth, L.; et al. The shuttle radar topography mission. Rev. Geophys. 2007, 45. [Google Scholar] [CrossRef]
- GDAL/OGR Contributors. GDAL/OGR Geospatial Data Abstraction Software Library; Open Source Geospatial Foundation: Beaverton, WA, USA, 2023. [Google Scholar]
- Hijmans, R.J. Terra: Spatial Data Analysis; R Package Version 1.7-46; R Foundation: Vienna, Austria, 2023. [Google Scholar]
- Pebesma, E.; Bivand, R. Spatial Data Science: With Applications in R; Chapman and Hall/CRC: Boca Raton, FL, USA, 2023. [Google Scholar] [CrossRef]
- Pebesma, E. Simple Features for R: Standardized Support for Spatial Vector Data. R J. 2018, 10, 439–446. [Google Scholar] [CrossRef]
- Dorman, M. Nngeo: K-Nearest Neighbor Join for Spatial Data; R Package Version 0.4.7; R Foundation: Vienna, Austria, 2023. [Google Scholar]
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2016. [Google Scholar]
- Chollet, F. Keras. 2015. Available online: https://keras.io (accessed on 15 March 2024).
- Allaire, J.; Chollet, F. Keras: R Interface to ‘Keras’; R Package Version 2.1.4; R Foundation: Vienna, Austria, 2016. [Google Scholar]
- Allaire, J.; Tang, Y. Tensorflow: R Interface to ‘TensorFlow’; R Package Version 2.2.0; R Foundation: Vienna, Austria, 2020. [Google Scholar]
- Abadi, M.; Agarwal, A.; Barham, P.; Brevdo, E.; Chen, Z.; Citro, C.; Corrado, G.S.; Davis, A.; Dean, J.; Devin, M.; et al. TensorFlow: Large-Scale Machine Learning on Heterogeneous Systems. 2015. Available online: https://www.tensorflow.org/ (accessed on 15 March 2024).
- Wagner, F.H.; Dalagnol, R.; Silva-Junior, C.H.; Carter, G.; Ritz, A.L.; Hirye, M.C.; Ometto, J.P.; Saatchi, S. Mapping tropical forest cover and deforestation with Planet NICFI satellite images and deep learning in Mato Grosso State (Brazil) from 2015 to 2021. Remote Sens. 2023, 15, 521. [Google Scholar] [CrossRef]
- Planet. Planet Imagery Product Specifications; Planet Labs: San Francisco, CA, USA, 2021; p. 91. [Google Scholar]
- Wagner, F.H. The flowering of Atlantic Forest Pleroma trees. Sci. Rep. 2021, 11, 20437. [Google Scholar] [CrossRef]
- Dice, L.R. Measures of the amount of ecologic association between species. Ecology 1945, 26, 297–302. [Google Scholar] [CrossRef]
- Kingma, D.P.; Ba, J. Adam: A Method for Stochastic Optimization. arXiv 2014. [Google Scholar] [CrossRef]
- Doblas, J.; Carneiro, A.; Shimabukuro, Y.; Sant’Anna, S.; Aragão, L. Assessment of rainfall influence on sentinel-1 time series on amazonian tropical forests aiming deforestation detection improvement. In Proceedings of the 2020 IEEE Latin American GRSS & ISPRS Remote Sensing Conference (LAGIRS), Santiago, Chile, 22–26 March 2020; pp. 397–402. [Google Scholar] [CrossRef]
- Ottoni, F.P.; Filgueira, C.T.S.; Lima, B.N.; Vieira, L.O.; Rangel-Pereira, F.; Oliveira, R.F. Extreme drought threatens the Amazon. Science 2023, 382, 1253. [Google Scholar] [CrossRef]
- Ionova, A.; Albeck-Ripka, L. A Lake Turned to a Hot ‘Soup.’ Then the River Dolphins Died. The New York Times, 4 October 2023. [Google Scholar]
- Gloor, M.; Brienen, R.J.; Galbraith, D.; Feldpausch, T.R.; Schöngart, J.; Guyot, J.L.; Espinoza, J.C.; Lloyd, J.; Phillips, O.L. Intensification of the Amazon hydrological cycle over the last two decades. Geophys. Res. Lett. 2013, 40, 1729–1733. [Google Scholar] [CrossRef]
- Marengo, J.A.; Espinoza, J.C. Extreme seasonal droughts and floods in Amazonia: Causes, trends and impacts. Int. J. Climatol. 2016, 36, 1033–1050. [Google Scholar] [CrossRef]
- Da Silva, S.S.; Brown, F.; de Oliveira Sampaio, A.; Silva, A.L.C.; dos Santos, N.C.R.S.; Lima, A.C.; de Souza Aquino, A.M.; da Costa Silva, P.H.; do Vale Moreira, J.G.; Oliveira, I.; et al. Amazon climate extremes: Increasing droughts and floods in Brazil’s state of Acre. Perspect. Ecol. Conserv. 2023, 21, 311–317. [Google Scholar] [CrossRef]
- Biancamaria, S.; Lettenmaier, D.P.; Pavelsky, T.M. The SWOT mission and its capabilities for land hydrology. In Remote Sensing and Water Resources; Springer: Berlin/Heidelberg, Germany, 2016; pp. 117–147. [Google Scholar]
- Lin, L.; Di, L.; Tang, J.; Yu, E.; Zhang, C.; Rahman, M.S.; Shrestha, R.; Kang, L. Improvement and validation of NASA/MODIS NRT global flood mapping. Remote Sens. 2019, 11, 205. [Google Scholar] [CrossRef]
- Kumar, D. Urban objects detection from C-band synthetic aperture radar (SAR) satellite images through simulating filter properties. Sci. Rep. 2021, 11, 6241. [Google Scholar] [CrossRef]
- Wang, Y.; Hess, L.L.; Filoso, S.; Melack, J.M. Understanding the radar backscattering from flooded and nonflooded Amazonian forests: Results from canopy backscatter modeling. Remote Sens. Environ. 1995, 54, 324–332. [Google Scholar] [CrossRef]
- Rosen, P.A.; Kumar, R. NASA-ISRO SAR (NISAR) Mission Status. In Proceedings of the 2021 IEEE Radar Conference (RadarConf21), Atlanta, GA, USA, 7–14 May 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Bian, X.; Shao, Y.; Zhang, C.; Xie, C.; Tian, W. The feasibility of assessing swell-based bathymetry using SAR imagery from orbiting satellites. ISPRS J. Photogramm. Remote Sens. 2020, 168, 124–130. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Products | Satellite Data | Spatial Resolution | Temporal Resolution | References |
|---|---|---|---|---|
| Water masks for training | Planet NICFI derivative | 4.78 m | Monthly | This paper |
| Our water surface model | Sentinel-1 | 10 m | 12 days | This paper |
| Global Surface Water (GSW) | Landsat Data Archive | 30 m | Multiyear | [4] |
| MapBiomas Water Initiative | Landsat Data Archive | 30 m | Yearly | [6,7,36] |
| LBA-ECO LC-07 | JERS-1 SAR | 90m | November 1995/July 1996 | [5,35] |
| SRTM | C-band SAR (Space Shuttle) | 30 m | February 2000 | [44] |
| Rio Negro water level | — | Port of Manaus | Daily | https://www.portodemanaus.com.br/?pagina=nivel-do-rio-negro-hoje |
| Model | Sample | Images | Precision | Recall | F1-Score |
|---|---|---|---|---|---|
| Water mask | Training | 59,387 | 0.935 | 0.926 | 0.930 |
| Validation | 6057 | 0.934 | 0.926 | 0.930 |
| Our Model | False Negative | False Negative | ||
|---|---|---|---|---|
| Vegetation Type and Dual-Season Flooding State from LBA-ECO LC-07 Data | GWS | MapBiomas | ||
| Cover at Low Water Stage | Cover at High Water Stage | Freq. (%) | Freq. (%) | Freq. (%) |
| Non-wetland within Amazon Basin | Non-wetland within Amazon Basin | 3,040,627 (12) | 310,982 (10.2) | 743,987 (9.6) |
| Open water | Open water | 7,564,727 (29.7) | 338,274 (11.1) | 256,448 (3.3) |
| Open water | Aquatic macrophyte (flooded herbaceous) | 214,580 (0.8) | 8275 (0.3) | 22,046 (0.3) |
| Non-flooded bare soil or herbaceous | Open water | 894,024 (3.5) | 317,612 (10.4) | 392,493 (5.0) |
| Non-flooded bare soil or herbaceous | Aquatic macrophyte (flooded herbaceous) | 590,643 (2.3) | 199,393 (6.5) | 343,246 (4.4) |
| Aquatic macrophyte (flooded herbaceous) | Aquatic macrophyte (flooded herbaceous) | 366,235 (1.4) | 121,902 (4) | 223,821 (2.9) |
| Non-flooded shrub | Open water | 48,268 (0.2) | 2645 (0.1) | 1290 (0.0) |
| Non-flooded shrub | Flooded shrub | 3,239,111 (12.7) | 499,891 (16.4) | 1,700,976 (21.9) |
| Flooded shrub | Open water | 496,599 (2) | 206,689 (6.8) | 318,729 (4.1) |
| Flooded shrub | Flooded shrub | 25,446 (0.1) | 3748 (0.1) | 4115 (0.1) |
| Non-flooded woodland | Flooded woodland | 501,838 (2) | 30,312 (1) | 17,367 (0.2) |
| Flooded woodland | Flooded woodland | 2,059,197 (8.1) | 619,445 (20.3) | 2,003,905 (25.7) |
| Non-flooded forest | Non-flooded forest | 1,692,959 (6.7) | 136,088 (4.5) | 697,255 (9.0) |
| Non-flooded forest | Flooded forest | 2,863,932 (11.3) | 94,924 (3.1) | 343,367 (4.4) |
| Flooded forest | Flooded forest | 1,723,735 (6.8) | 147,859 (4.9) | 632,938 (8.1) |
| Elevation >= 500 m, in Basin | Elevation >= 500 m, in Basin | 105,759 (0.4) | 10,394 (0.3) | 81,478 (1.0) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wagner, F.H.; Favrichon, S.; Dalagnol, R.; Hirye, M.C.M.; Mullissa, A.; Saatchi, S. The Amazon’s 2023 Drought: Sentinel-1 Reveals Extreme Rio Negro River Contraction. Remote Sens. 2024, 16, 1056. https://doi.org/10.3390/rs16061056
Wagner FH, Favrichon S, Dalagnol R, Hirye MCM, Mullissa A, Saatchi S. The Amazon’s 2023 Drought: Sentinel-1 Reveals Extreme Rio Negro River Contraction. Remote Sensing. 2024; 16(6):1056. https://doi.org/10.3390/rs16061056
Chicago/Turabian StyleWagner, Fabien H., Samuel Favrichon, Ricardo Dalagnol, Mayumi C. M. Hirye, Adugna Mullissa, and Sassan Saatchi. 2024. "The Amazon’s 2023 Drought: Sentinel-1 Reveals Extreme Rio Negro River Contraction" Remote Sensing 16, no. 6: 1056. https://doi.org/10.3390/rs16061056
APA StyleWagner, F. H., Favrichon, S., Dalagnol, R., Hirye, M. C. M., Mullissa, A., & Saatchi, S. (2024). The Amazon’s 2023 Drought: Sentinel-1 Reveals Extreme Rio Negro River Contraction. Remote Sensing, 16(6), 1056. https://doi.org/10.3390/rs16061056