
Surface Heat Monitoring with High-Resolution UAV Thermal Imaging: Assessing Accuracy and Applications in Urban Environments



Abstract
1. Introduction
2. Materials and Methods
2.1. Materials
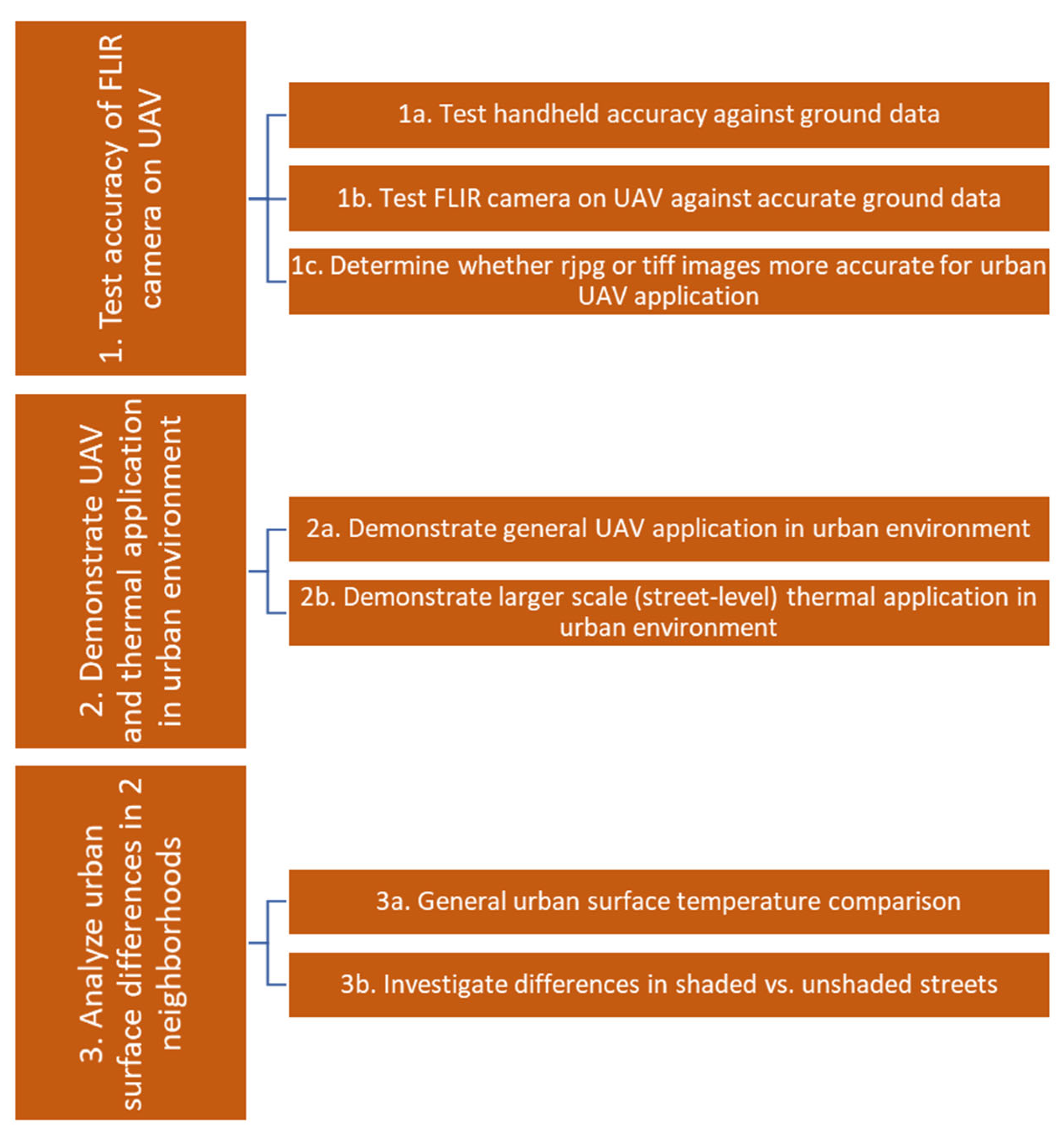
2.2. Initial Testing (Objective 1)
2.2.1. Overview
2.2.2. Test Handheld Accuracy against Ground Data (Objective 1a)
2.2.3. Testing the FLIR Camera on a UAV against Accurate Ground Data (Objectives 1b and 1c)
2.2.4. Determining the Best Flying Height (Objective 1b)
2.3. Demonstrating UAV and Thermal Applications in Urban Environments for Urban Surface Analysis (Objectives 2 and 3)
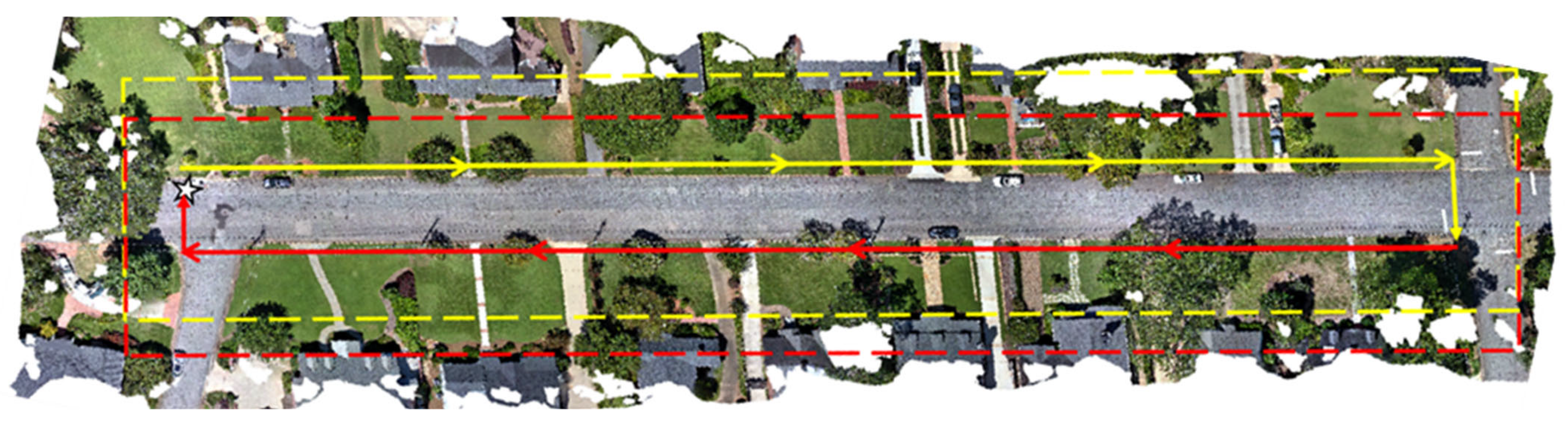
2.3.1. Demonstrating General UAV Applications and Larger Scale (Street-Level) Thermal Applications in Urban Environments (Objectives 2a and 2b)
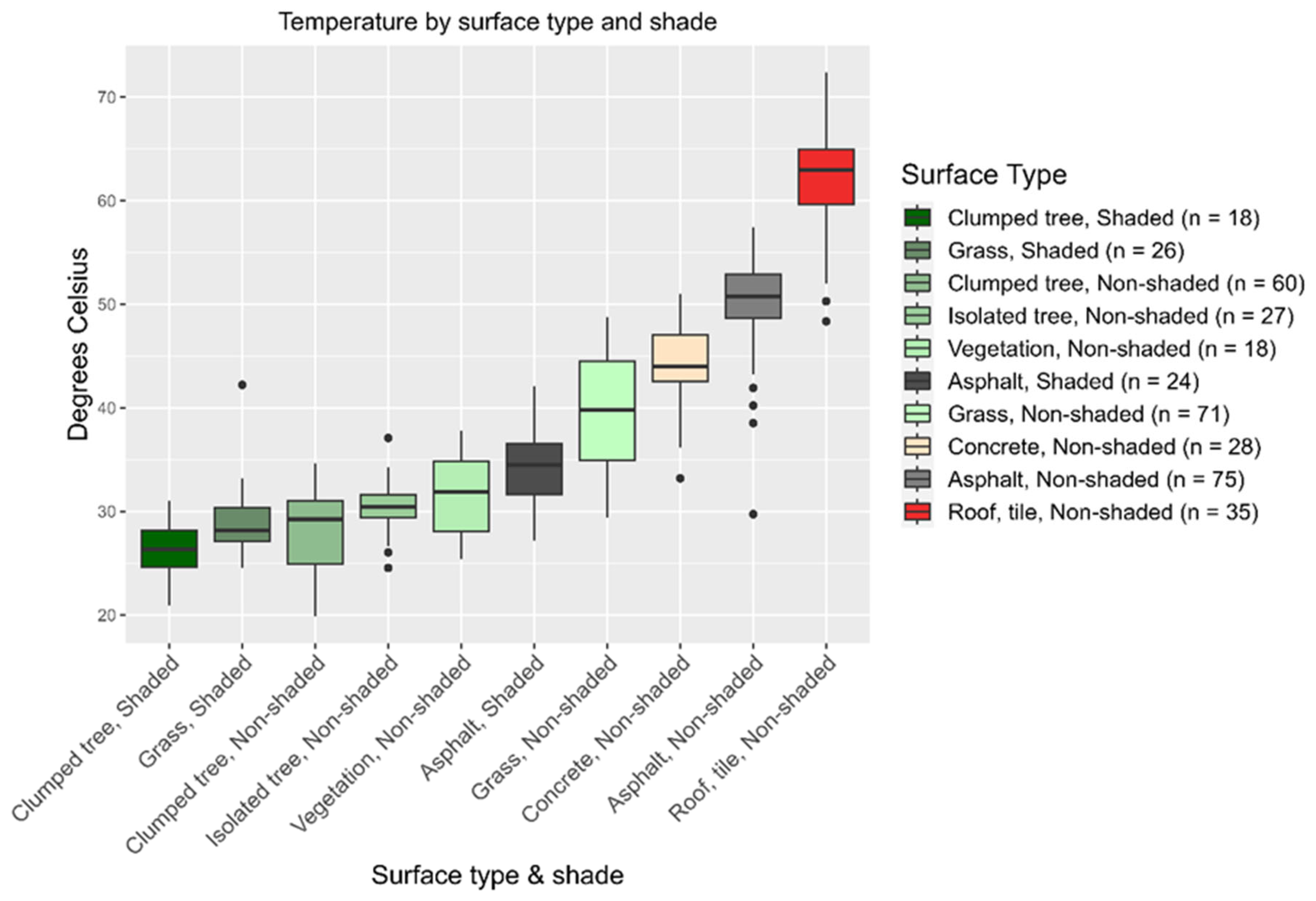
2.3.2. General Urban Surface Temperature Comparison (Objective 3a)
2.4. Data Processing and Analysis
3. Results
3.1. Initial Testing (Objective 1)
3.1.1. Handheld Accuracy (Objective 1a)
3.1.2. Vue Pro R Accuracy for All Three File Format Methods (Objectives 1b and 1c)
3.1.3. Optimal Flying Height (Objective 1b)
3.2. Urban Surface Thermal Analysis (Objective 3)
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reading | White | Gray | Black | Measurement Error (ME %) | |||
|---|---|---|---|---|---|---|---|
| Handheld FLIR Infrared Imaging Camera | Average Tile Reading | Handheld FLIR Infrared Imaging Camera | Average Tile Reading | Handheld FLIR Infrared Imaging Camera | Average Tile Reading | White Gray Black | |
| 1 | 35.6 | 35.9 | 43.0 | 43.8 | 56.4 | 56.4 | 0.3 (0.9) 0.8 (1.8) 0.0 (0.1) |
| 2 | 35.6 | 36.2 | 42.5 | 44.2 | 55.9 | 56.6 | 0.6 (1.6) 1.7 (3.8) 0.7 (1.3) |
| 3 | 36.2 | 36.7 | 43.5 | 44.5 | 57.2 | 56.9 | 0.5 (1.4) 1.0 (2.3) −0.3 (−0.5) |
| 4 | 36.0 | 37.0 | 43.6 | 45.1 | 57.0 | 57.5 | 1.0 (2.8) 1.5 (3.2) 0.5 (0.9) |
| 5 | 36.44 | 37.0 | 44.2 | 45.6 | 58.4 | 58.0 | 0.6 (1.6) 1.4 (3.0) −0.4 (−0.7) |
| 6 | 36.5 | 37.3 | 44.7 | 45.9 | 58.3 | 58.3 | 0.8 (2.0) 1.2 (2.7) 0.0 (0.0) |
| 7 | 38.7 | 38.7 | 47.9 | 48.7 | 61.3 | 61.1 | 0 (0.1) 0.8 (1.7) −0.2 (−0.3) |
| 8 | 38.6 | 38.8 | 47.8 | 48.9 | 61.0 | 61.1 | 0.2 (0.6) 1.1 (2.3) 0.1 (0.1) |
| 9 | 38.6 | 38.8 | 48.1 | 49.0 | 60.6 | 60.8 | 0.2 (0.5) 0.9 (1.8) 0.2 (0.3) |
| 10 | 38.6 | 38.9 | 47.8 | 49.0 | 60.7 | 60.4 | 0.3 (0.8) 1.2 (2.5) −0.3 (−0.5) |
| 11 | 38.6 | 39.0 | 47.7 | 49.2 | 60.1 | 60.4 | 0.4 (1.1) 1.5 (3.0) 0.3 (0.5) |
| 12 | 38.4 | 39.1 | 48.0 | 49.3 | 60.0 | 60.1 | 0.7 (1.8) 1.3 (2.6) 0.1 (0.2) |
References
- Oke, T.R.; Mills, G.; Christen, A.; Voogt, J.A. Urban Heat Island. In Urban Climates; Cambridge University Press: Cambridge, UK, 2017; pp. 197–237. [Google Scholar]
- Mills, G. Luke Howard and the climate of London. Weather 2008, 63, 153–157. [Google Scholar] [CrossRef]
- Nuruzzaman, M. Urban Heat Island: Causes, Effects and Mitigation Measures—A Review. Int. J. Environ. Monit. Anal. 2015, 3, 67–73. [Google Scholar] [CrossRef]
- Mohajerani, A.; Bakaric, J.; Jeffrey-Bailey, T. The urban heat island effect, its causes, and mitigation, with reference to the thermal properties of asphalt concrete. J. Environ. Manag. 2017, 197, 522–538. [Google Scholar] [CrossRef]
- Vaidyanathan, A.; Malilay, J.; Schramm, P.; Saha, S. Heat-Related Deaths—United States, 2004–2018. Morb. Mortal. Wkly. Rep. 2020, 69, 729. [Google Scholar] [CrossRef] [PubMed]
- Wilson, B. Urban Heat Management and the Legacy of Redlining. J. Am. Plan. Assoc. 2020, 86, 443–457. [Google Scholar] [CrossRef]
- Mitchell, B.C.; Chakraborty, J. Landscapes of thermal inequity: Disproportionate exposure to urban heat in the three largest US cities. Environ. Res. Lett. 2015, 10, 115005. [Google Scholar] [CrossRef]
- Li, X.; Zhou, Y.; Yu, S.; Jia, G.; Li, H.; Li, W. Urban heat island impacts on building energy consumption: A review of approaches and findings. Energy 2019, 174, 407–419. [Google Scholar] [CrossRef]
- Yang, Y.; Chen, H.; Abdullah Al, M.; Ndayishimiye, J.C.; Yang, J.R.; Isabwe, A.; Luo, A.; Yang, J. Urbanization reduces resource use efficiency of phytoplankton community by altering the environment and decreasing biodiversity. J. Environ. Sci. 2022, 112, 140–151. [Google Scholar] [CrossRef]
- McGrane, S.J. Impacts of urbanisation on hydrological and water quality dynamics, and urban water management: A review. Hydrol. Sci. J. 2016, 61, 2295–2311. [Google Scholar] [CrossRef]
- Gago, E.J.; Roldan, J.; Pacheco-Torres, R.; Ordóñez, J. The city and urban heat islands: A review of strategies to mitigate adverse effects. Renew. Sustain. Energy Rev. 2013, 25, 749–758. [Google Scholar] [CrossRef]
- Abulibdeh, A. Analysis of urban heat island characteristics and mitigation strategies for eight arid and semi-arid gulf region cities. Environ. Earth Sci. 2021, 80, 259. [Google Scholar] [CrossRef] [PubMed]
- Zhou, Y.; Shepherd, J.M. Atlanta’s urban heat island under extreme heat conditions and potential mitigation strategies. Nat. Hazards 2009, 52, 639–668. [Google Scholar] [CrossRef]
- Katpatal, Y.B.; Kute, A.; Satapathy, D.R. Surface-and air-temperature studies in relation to land use/land cover of Nagpur urban area using Landsat 5 TM data. J. Urban Plan. Dev. ASCE 2008, 134, 110–118. [Google Scholar] [CrossRef]
- Ziter, C.D.; Pedersen, E.J.; Kucharik, C.J.; Turner, M.G. Scale-dependent interactions between tree canopy cover and impervious surfaces reduce daytime urban heat during summer. Proc. Natl. Acad. Sci. USA 2019, 116, 7575–7580. [Google Scholar] [CrossRef] [PubMed]
- Bechtel, B.; Zakšek, K.; Oßenbrügge, J.; Kaveckis, G.; Böhner, J. Towards a satellite based monitoring of urban air temperatures. Sustain. Cities Soc. 2017, 34, 22–31. [Google Scholar] [CrossRef]
- Alonzo, M.; Baker, M.E.; Gao, Y.; Shandas, V. Spatial configuration and time of day impact the magnitude of urban tree canopy cooling. Environ. Res. Lett. 2021, 16, 084028. [Google Scholar] [CrossRef]
- Coutts, A.M.; Harris, R.J.; Phan, T.; Livesley, S.J.; Williams, N.S.G.; Tapper, N.J. Thermal infrared remote sensing of urban heat: Hotspots, vegetation, and an assessment of techniques for use in urban planning. Remote Sens. Environ. 2016, 186, 637–651. [Google Scholar] [CrossRef]
- Sagan, V.; Maimaitijiang, M.; Sidike, P.; Eblimit, K.; Peterson, K.; Hartling, S.; Esposito, F.; Khanal, K.; Newcomb, M.; Pauli, D.; et al. UAV-Based High Resolution Thermal Imaging for Vegetation Monitoring, and Plant Phenotyping Using ICI 8640 P, FLIR Vue Pro R 640, and thermoMap Cameras. Remote Sens. 2019, 11, 330. [Google Scholar] [CrossRef]
- Silvestri, M.; Marotta, E.; Buongiorno, M.F.; Avvisati, G.; Belviso, P.; Bellucci Sessa, E.; Caputo, T.; Longo, V.; De Leo, V.; Teggi, S. Monitoring of Surface Temperature on Parco delle Biancane (Italian Geothermal Area) Using Optical Satellite Data, UAV and Field Campaigns. Remote Sens. 2020, 12, 2018. [Google Scholar] [CrossRef]
- Sangha, H.S.; Sharda, A.; Koch, L.; Prabhakar, P.; Wang, G. Impact of camera focal length and sUAS flying altitude on spatial crop canopy temperature evaluation. Comput. Electron. Agric. 2020, 172, 105344. [Google Scholar] [CrossRef]
- Lacerda, L.N.; Snider, J.L.; Cohen, Y.; Liakos, V.; Gobbo, S.; Vellidis, G. Using UAV-based thermal imagery to detect crop water status variability in cotton. Smart Agric. Technol. 2022, 2, 100029. [Google Scholar] [CrossRef]
- Dong, Y.; Cai, Y.; Li, C.; Wang, H.; Zhou, L.; Sun, J.; Li, C.; Song, B.; Zhou, G. Vertical thermal environment of subtropical broad-leaved urban forests and the influence of canopy structure. Build. Environ. 2022, 224, 109521. [Google Scholar] [CrossRef]
- Smith, P.; Sarricolea, P.; Peralta, O.; Aguila, J.P.; Thomas, F. Study of the urban microclimate using thermal UAV. The case of the mid-sized cities of Arica (arid) and Curicó (Mediterranean), Chile. Build. Environ. 2021, 206, 108372. [Google Scholar] [CrossRef]
- Song, B.; Park, K. Verification of Accuracy of Unmanned Aerial Vehicle (UAV) Land Surface Temperature Images Using In-Situ Data. Remote Sens. 2020, 12, 288. [Google Scholar] [CrossRef]
- Soto-Estrada, E.; Correa-Echeveria, S.; Posada-Posada, M.I. Thermal analysis of urban environments in Medellin, Colombia, using an unmanned aerial vehicle (UAV). J. Urban Environ. Eng. 2017, 11, 142–149. [Google Scholar]
- Yang, C.; Zhu, W.; Sun, J.; Xu, X.; Wang, R.; Lu, Y.; Zhang, S.; Zhou, W. Assessing the effects of 2D/3D urban morphology on the 3D urban thermal environment by using multi-source remote sensing data and UAV measurements: A case study of the snow-climate city of Changchun, China. J. Clean. Prod. 2021, 321, 128956. [Google Scholar] [CrossRef]
- Feng, L.; Tian, H.; Qiao, Z.; Zhao, M.; Liu, Y. Detailed Variations in Urban Surface Temperatures Exploration Based on Unmanned Aerial Vehicle Thermography. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 204–216. [Google Scholar] [CrossRef]
- Caputo, T.; Bellucci Sessa, E.; Marotta, E.; Caputo, A.; Belviso, P.; Avvisati, G.; Peluso, R.; Carandente, A. Estimation of the Uncertainties Introduced in Thermal Map Mosaic: A Case of Study with PIX4D Mapper Software. Remote Sens. 2023, 15, 4385. [Google Scholar] [CrossRef]
- Jensen, J.R. Remote Sensing of the Environment: An Earth Resource Perspective 2/e; Pearson Education: Bengaluru, India, 2009. [Google Scholar]
- FLIR. Radiometric Temperature Measurements; Academic Press: Cambridge, MA, USA, 2009. [Google Scholar]
- Oke, T.R.; Mills, G.; Christen, A.; Voogt, J.A. Radiation. In Urban Climates; Cambridge University Press: Cambridge, UK, 2017; pp. 122–155. [Google Scholar]
- FLIR. FLIR Vue Pro and FLIR Vue Pro R Datasheet. 2019. Available online: https://flir.netx.net/file/asset/10907/original/attachment (accessed on 19 April 2021).
- Percival, G.C. Heat tolerance of urban trees—A review. Urban For. Urban Green. 2023, 86, 128021. [Google Scholar] [CrossRef]
- Teskey, R.; Wertin, T.; Bauweraerts, I.; Ameye, M.; McGuire, M.A.; Steppe, K. Responses of tree species to heat waves and extreme heat events. Plant Cell Env. 2015, 38, 1699–1712. [Google Scholar] [CrossRef]
- Duarte, A.G.; Katata, G.; Hoshika, Y.; Hossain, M.; Kreuzwieser, J.; Arneth, A.; Ruehr, N.K. Immediate and potential long-term effects of consecutive heat waves on the photosynthetic performance and water balance in Douglas-fir. J. Plant Physiol. 2016, 205, 57–66. [Google Scholar] [CrossRef]




| Instrument | Sensor Technology | Lens and FOV | Radiometric Accuracy | Spectral Range | Operating Temperature Range | Operational Altitude |
|---|---|---|---|---|---|---|
| FLIR Vue Pro R 640 | Uncooled VOx microbolometer | 13 mm; 45° × 37° | ±5 °C | 7.5–13.5 µm | −20 °C to 50 °C | 12,192 m (40,000 ft) |
| FLIR E6-XT (handheld) | Focal plane array (FPA), uncooled microbolometer | 45° × 34° | ±2 °C (±3.6 °F) or ±2% of reading for ambient temperatures of 10 °C to 35 °C (50 °F to 95 °F) and object temperature above 0 °C (32 °F) | 7.5–13.5 µm | −20 °C to 550 °C | N/A |
| Day | Sky Conditions | Temperature (°C), Relative Humidity |
|---|---|---|
| 2 September | Sunny with passing clouds, wind moving east at 3.6 m/s (8.1 mph) | 30°, 48% |
| 3 September | Sunny, winds moving east-southeast at 3.1 m/s (6.9 mph) | 28.3°, 37% |
| 9 September | Sunny with scattered clouds, winds moving north-northwest at 4.6 m/s (10.4 mph) | 30.6°, 43% |
| 10 September | Sunny, winds still at 0 m/s (0 mph) | 30°, 41% |
| Surface Type | Emissivity Value | Source |
|---|---|---|
| Asphalt | 0.94 | [31] |
| Concrete | 0.92 | [31] |
| Grass | 0.97 | [30] |
| Roof: Tile, shingles Galvanized steel | 0.90 0.25 | [32] |
| Soil | 0.90 | [31] |
| Vegetation | 0.97 | [30] |
| Handheld Infrared Imaging Camera | Average Tile Reading | Average Measurement Error (Direction Included) | Average Absolute Measurement Error | Average RMSE | |
|---|---|---|---|---|---|
| White | 37.3 | 37.8 | 0.5 | 0.5 | 0.7 |
| Gray | 45.7 | 46.9 | 1.2 | 1.2 | 1.3 |
| Black | 58.9 | 58.9 | 0.1 | 0.3 | 0.1 |
| Temperature (°C) Per Surface by Height Level | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Ground Truth Temperature (°C) | TIFF FLIR Formula | TIFF Linear Regression | RJPG | ||||||||
| Height (m) | Tile Color/Surface Type | Tiff Flight Average (St. dev) | n | Rjpg Flight Average (St. dev) | n | Average (St. dev) | RMSE | Average (St. dev) | RMSE | Average (St. dev) | RMSE |
| 30.5 (100 ft) | White | 38.3 (0.2) | 9 | 35.9 (0.2) | 6 | 41.3 (1.0) | 3.1 | 35.6 (1.2) | 2.8 | 38.4 (2.3) | 4.4 |
| Gray | 48.4 (0.2) | 5 | 43.8 (0.2) | 6 | 49.0 (0.9) | 0.7 | 45.2 (1.1) | 3.6 | 44.8 (2.1) | 1.8 | |
| Black | 60.9 (0.2) | 6 | 56.4 (0.7) | 6 | 60.7 (0.8) | 0.7 | 59.8 (1.0) | 1.5 | 56.7 (2.0) | 0.6 | |
| Grass1 | 34.4 | 1 | 32.9 | 1 | 38.2 (0.8) | 4.4 | 31.9 (1.0) | 2.1 | 37.0 (1.9) | 7.0 | |
| Grass2 | 36.6 | 1 | 35.7 | 1 | 39.4 (0.9) | 3.4 | 33.3 (1.1) | 2.8 | 39.2 (2.1) | 6.0 | |
| 45.7 (150 ft) | White | 38.5 (0.1) | 3 | 36.2 (0.1) | 3 | 43.6 (0.3) | 5.2 | 38.5 (0.4) | 0.3 | 39.8 (3.2) | 6.4 |
| Gray | 48.7 (0.2) | 4 | 44.2 (0.1) | 3 | 50.8 (0.3) | 2.0 | 47.5 (0.4) | 1.4 | 45.7 (3.2) | 2.9 | |
| Black | 61.1 (0.3) | 3 | 56.6 (0.7) | 3 | 61.6 (0.4) | 0.6 | 61.0 (0.4) | 0.4 | 56.9 (3.5) | 0.7 | |
| Grass1 | 33.8 | 1 | 33.4 | 1 | 39.7 (0.5) | 6.5 | 33.7 (0.6) | 0.7 | 37.4 (2.5) | 7.0 | |
| Grass2 | 35.6 | 1 | 35.8 | 1 | 41.0 (0.5) | 6.0 | 35.3 (0.6) | 0.6 | 39.7 (3.6) | 6.8 | |
| 50.3 (165 ft) | White | 38.7 (0.1) | 6 | 36.4 (0.2) | 4 | 44.2 (0.3) | 5.6 | 39.2 (0.4) | 0.7 | 39.0 (0.6) | 4.7 |
| Gray | 48.9 (0.2) | 5 | 44.5 (0.2) | 5 | 51.3 (0.1) | 2.3 | 48.1 (0.1) | 0.9 | 44.9 (0.6) | 0.8 | |
| Black | 61.1 (0.4) | 6 | 56.9 (0.7) | 5 | 61.9 (0.1) | 1.1 | 61.3 (0.2) | 0.5 | 56.2 (0.4) | 0.9 | |
| Grass1 | 33.7 | 1 | 33.5 | 1 | 40.1 (0.2) | 7.1 | 34.2 (0.3) | 1.3 | 37.1 (0.6) | 6.2 | |
| Grass2 | 34.4 | 1 | 36 | 1 | 41.0 (0.2) | 7.2 | 35.4 (0.2) | 1.6 | 38.7 (0.7) | 4.6 | |
| 53.3 (175 ft) | White | 38.8 (0.1) | 5 | 36.7 (0.2) | 7 | 45.4 (0.7) | 6.7 | 40.8 (0.8) | 2.1 | 40.1 (0.3) | 5.8 |
| Gray | 49.0 (0.3) | 6 | 45.1 (0.2) | 6 | 51.9 (0.7) | 3.4 | 49.5 (0.8) | 0.8 | 46.0 (0.3) | 1.7 | |
| Black | 60.8 (0.7) | 5 | 57.5 (0.7) | 5 | 62.6 (0.6) | 2.2 | 62.2 (0.8) | 1.9 | 57.0 (0.4) | 0.9 | |
| Grass1 | 33.7 | 1 | 33.4 | 1 | 40.9 (0.8) | 7.9 | 35.2 (1.0) | 2.4 | 37.8 (0.3) | 7.6 | |
| Grass2 | 36.2 | 1 | 36.1 | 1 | 42.0 (0.8) | 6.6 | 36.7 (0.9) | 1.4 | 39.6 (0.4) | 6.1 | |
| 56.4 (185 ft) | White | 38.8 (0.1) | 8 | 37.0 (0.2) | 5 | 45.9 (0.8) | 7.1 | 41.3 (1.0) | 2.7 | 40.3 (0.0) | 5.8 |
| Gray | 49.0 (0.4) | 10 | 45.6 (0.2) | 5 | 52.4 (0.7) | 3.6 | 49.8 (0.7) | 1.0 | 46.4 (0.3) | 1.5 | |
| Black | 60.4 (1.0) | 8 | 58.0 (0.5) | 5 | 62.5 (0.5) | 2.1 | 62.0 (0.7) | 1.7 | 57.1 (0.4) | 1.5 | |
| Grass1 | 32.8 | 1 | 33.9 | 1 | 41.5 (0.9) | 9.2 | 36.0 (1.1) | 3.8 | 38.5 (0.3) | 7.9 | |
| Grass2 | 34.7 | 1 | 35.9 | 1 | 42.9 (0.8) | 8.9 | 37.8 (1.0) | 3.8 | 39.5 (0.6) | 6.3 | |
| 61 (200 ft) | White | 38.9 (0.2) | 5 | 37.3 (0.1) | 5 | 41.3 (2.6) | 3.3 | 35.6 (3.2) | 4.2 | 39.3 (0.9) | 3.6 |
| Gray | 49.2 (0.4) | 8 | 45.9 (0.2) | 4 | 48.5 (2.3) | 2.1 | 44.7 (2.9) | 5.2 | 45.6 (0.9) | 0.1 | |
| Black | 60.4 (1.0) | 7 | 58.3 (0.3) | 6 | 58.0 (2.2) | 2.9 | 56.5 (2.8) | 4.4 | 56.6 (0.6) | 2.9 | |
| Grass1 | 33.4 | 1 | 34.1 | 1 | 37.1 (2.7) | 4.8 | 30.5 (3.3) | 3.6 | 37.1 (0.9) | 5.3 | |
| Grass2 | 36.2 | 1 | 35.7 | 1 | 37.8 (3.1) | 3.4 | 31.4 (3.8) | 5.2 | 38.4 (1.2) | 4.7 | |
| Neighborhood | Day | Surface | Shaded | n | Handheld Reading Average | Thermal Camera Average | Measurement Error Range | Absolute Measurement Error Average | Measurement Error Average (Direction Included) | RMSE |
|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 9/2/2021 | Asphalt | No | 10 | 49.2 | 49.7 | 11.9 | 3.5 | −0.5 | 4.1 |
| Yes | 6 | 30.3 | 34.3 | 7.1 | 4.0 | −4.0 | 4.9 | |||
| Concrete | No | 13 | 44.8 | 45.8 | 16.8 | 4.2 | −1.0 | 5.0 | ||
| Yes | 9 | 29.6 | 32.5 | 7.4 | 3.5 | −3.0 | 4.1 | |||
| Grass | No | 7 | 36.5 | 41.2 | 14.0 | 5.5 | −4.7 | 6.3 | ||
| Yes | 7 | 26.2 | 30.5 | 16.5 | 5.6 | −4.4 | 7.0 | |||
| 9/3/2021 | Asphalt | No | 15 | 52.8 | 53.2 | 9.6 | 2.7 | −0.4 | 3.1 | |
| Yes | 9 | 29.6 | 35.2 | 18.9 | 7.0 | −5.6 | 8.0 | |||
| Concrete | No | 14 | 43.7 | 45.6 | 17.3 | 3.2 | −1.9 | 4.5 | ||
| Grass | No | 18 | 36.8 | 39.3 | 14.7 | 4.4 | −2.5 | 5.0 | ||
| Yes | 9 | 22.6 | 31.3 | 10.5 | 8.7 | −8.7 | 9.5 | |||
| Pine straw | No | 6 | 48.3 | 46.9 | 17.6 | 5.3 | 1.5 | 6.4 | ||
| 2 | 9/9/2021 | Asphalt | No | 31 | 50.1 | 49.4 | 10.8 | 2.1 | 0.8 | 2.7 |
| Yes | 19 | 32.5 | 37.0 | 13.7 | 5.0 | −4.6 | 6.4 | |||
| Concrete | No | 27 | 44.5 | 45.0 | 14.9 | 2.9 | −0.4 | 3.5 | ||
| Grass | No | 31 | 40.8 | 44.0 | 20.7 | 5.1 | −3.2 | 6.2 | ||
| Yes | 9 | 29.4 | 35.4 | 9.8 | 6.0 | −6.0 | 6.6 | |||
| 9/10/2021 | Asphalt | No | 20 | 50.7 | 49.1 | 8.7 | 2.1 | 1.6 | 2.7 | |
| Yes | 19 | 32.0 | 36.4 | 12.4 | 4.4 | −4.4 | 5.6 | |||
| Concrete | No | 10 | 44.4 | 42.9 | 8.1 | 2.5 | 1.6 | 3.0 | ||
| Grass | No | 23 | 40.2 | 42.0 | 16.9 | 4.0 | −1.8 | 4.8 | ||
| Yes | 10 | 26.2 | 31.2 | 9.2 | 5.0 | −5.0 | 5.7 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Henn, K.A.; Peduzzi, A. Surface Heat Monitoring with High-Resolution UAV Thermal Imaging: Assessing Accuracy and Applications in Urban Environments. Remote Sens. 2024, 16, 930. https://doi.org/10.3390/rs16050930
Henn KA, Peduzzi A. Surface Heat Monitoring with High-Resolution UAV Thermal Imaging: Assessing Accuracy and Applications in Urban Environments. Remote Sensing. 2024; 16(5):930. https://doi.org/10.3390/rs16050930
Chicago/Turabian StyleHenn, Katrina Ariel, and Alicia Peduzzi. 2024. "Surface Heat Monitoring with High-Resolution UAV Thermal Imaging: Assessing Accuracy and Applications in Urban Environments" Remote Sensing 16, no. 5: 930. https://doi.org/10.3390/rs16050930
APA StyleHenn, K. A., & Peduzzi, A. (2024). Surface Heat Monitoring with High-Resolution UAV Thermal Imaging: Assessing Accuracy and Applications in Urban Environments. Remote Sensing, 16(5), 930. https://doi.org/10.3390/rs16050930