

A New Synthetic Aperture Radar Ship Detector Based on Clutter Intensity Statistics in Complex Environments



Abstract
1. Introduction
- Algorithm principles. The threshold estimation of the traditional methods is based on a theoretical clutter statistical model such as Log-normal, Rayleigh, and Otsu. This means that the threshold is adaptive to changes in sea clutter as long as the clutter statistics fit the known model. CNN-based methods learn ship target features autonomously and then fix the weight parameters. However, as the CNN deepens, the learned features become unexplainable gradually.
- Detection rules. In the traditional methods, each pixel is determined by comparing it with an adaptive threshold. CNN-based methods determine ship targets according to the confidence levels calculated from the statistical features of SAR ship images such as shape and texture.
- Detection results. Binary segmentation images are the output results of traditional methods. For most CNN-based methods, the ships are marked by external boxes.
- Parameters. Artificial intelligence algorithms must be trained towards the dataset and save the necessary number of parameters. Traditional methods are the opposite.
- Clutter intensity statistics (CIS) are proposed to detect SAR ships in complex environments. CIS establishes the relationship between the ship target and the outlier, which expands their difference. The influence of outliers is effectively alleviated, especially for complex scenes. Although the CIS detector is irrelevant to traditional clutter statistical distribution models and PFA, it still projects outstanding performance.
- The structure of the detection window is no longer a sensitive factor for SAR ship detection. As the max intensity of outliers in a sliding window becomes one term of the adaptive threshold estimation formula, the threshold estimation is less affected by the intensities and quantity of outliers in clutter samples.
- Adjustment factor λ is an adjustor that is utilized to adjust thresholds to raise the probability of detection or decrease false alarms. λ is the only global parameter. The optimal λ is determined according to the experimental results on detection performance under the different simulated clutters.
2. Related Work
3. Methods
3.1. TP-CFAR Detector
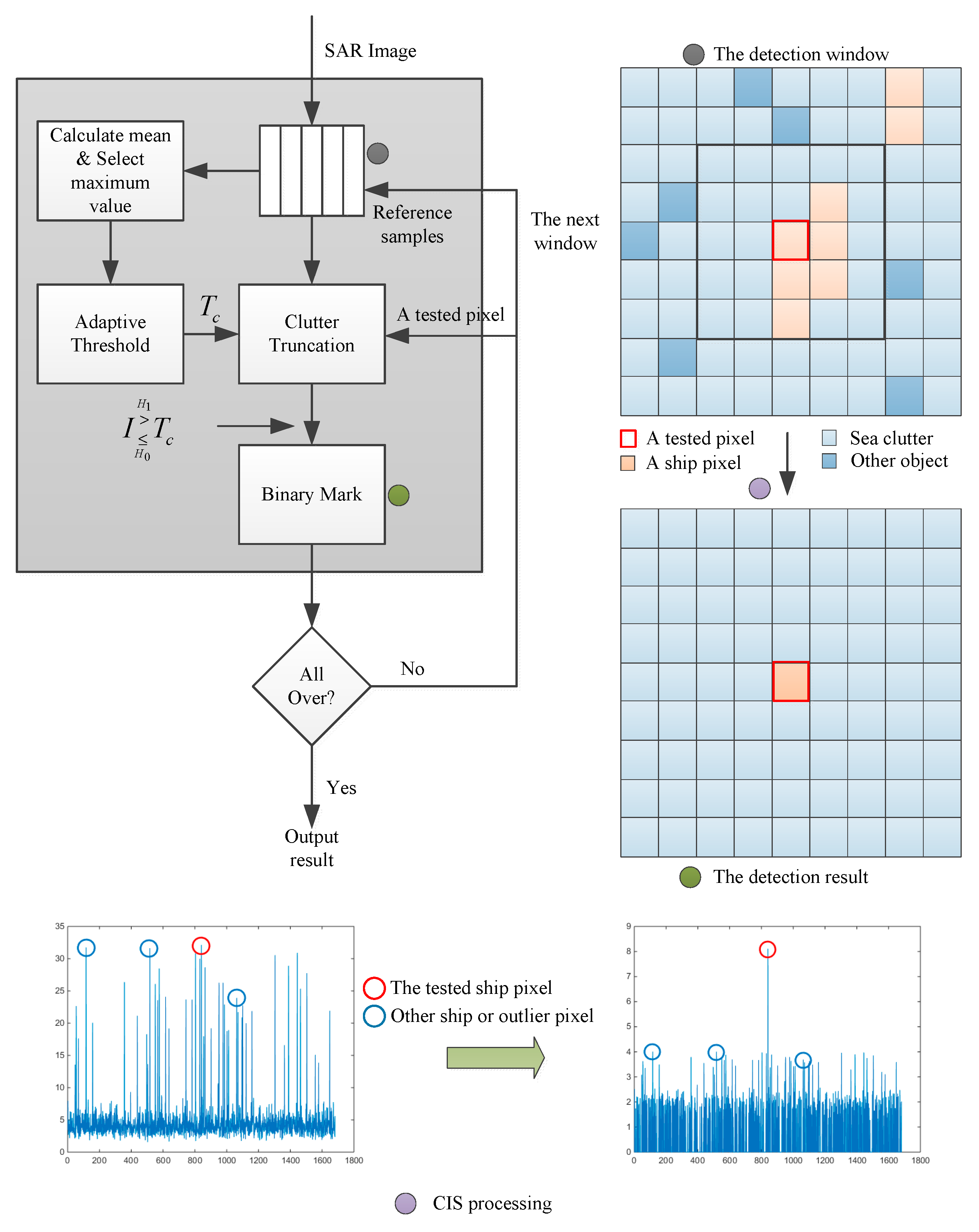
3.2. CIS Detection
3.3. The Rule of the CIS Detection
- The adjustment factor λ is initialized. The size of the test window is determined according to the sizes of the ships in a SAR image.
- The parameters μ, ξ, and σ of clutter samples in the background window are computed according to formulas (1), (2), and (6).
- The adaptive threshold Tc is estimated using the CIS model, as shown in formula (12). Tc is used to separate the ship pixels from sea clutter in a local window.
- The intensity value of the tested pixel is compared with Tc. The rule of CIS detection is
- 5.
- If all the pixels are detected, the final detection result is the output. Otherwise, the next pixel is moved it and steps from (2) to (4) are repeated.
4. Experiment
4.1. Experiment Introduction
- The structures of the detection windows of the reference methods are listed in Table 3. The size of the detection window is set according to the sizes of the ships.
- According to [35], a false-alarm rate of 0.00001 is set for all the CFAR detectors, and the truncation depth γ of OR-CFAR is 2.0.
- The symmetric image block is used to detect the edge pixels of a SAR image.
- The adjustment factor λ of CIS is set to 1.0, 2.0, and 3.0. The aim is to investigate the detection performance of CIS under different adjustment factors.
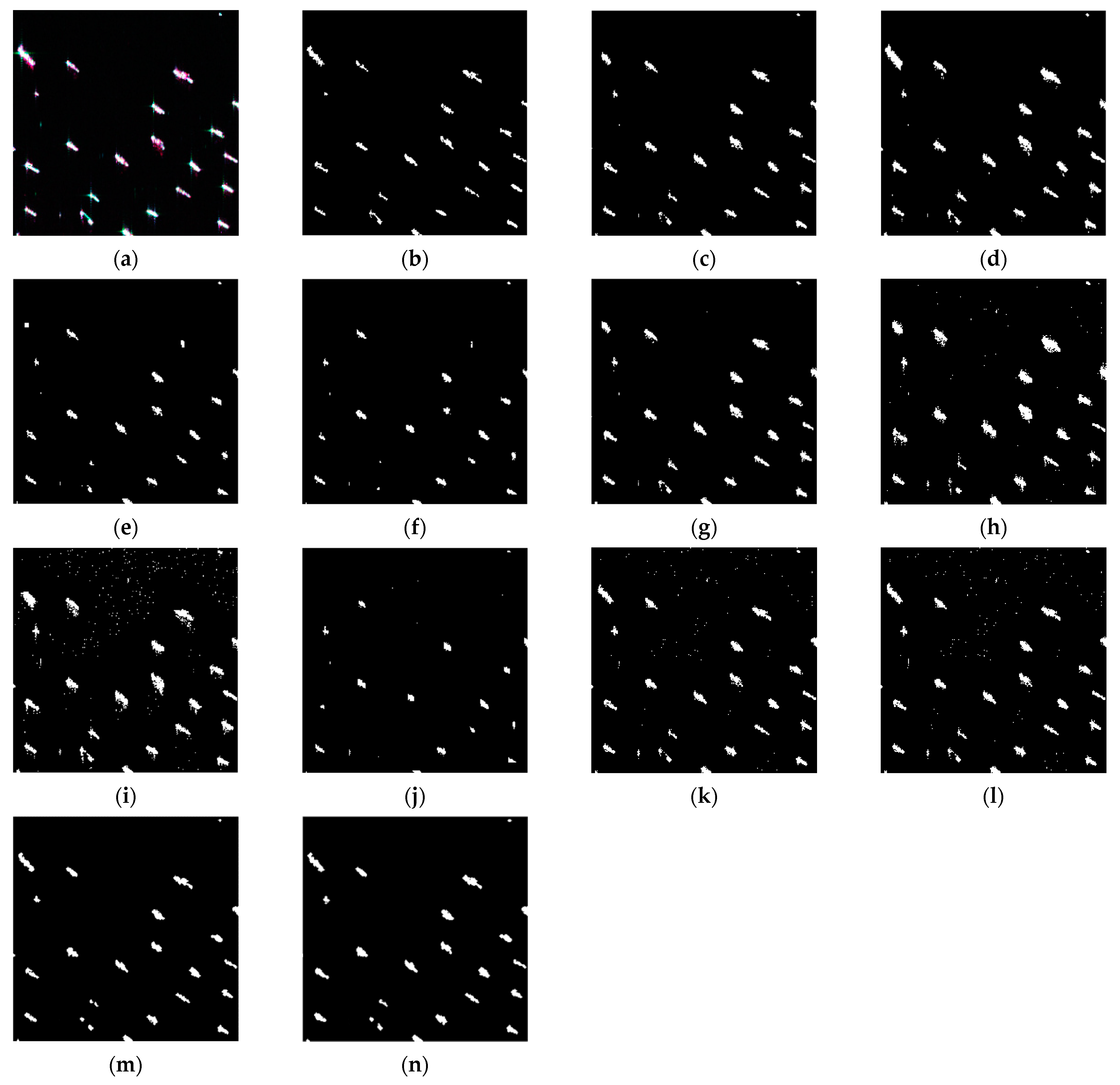
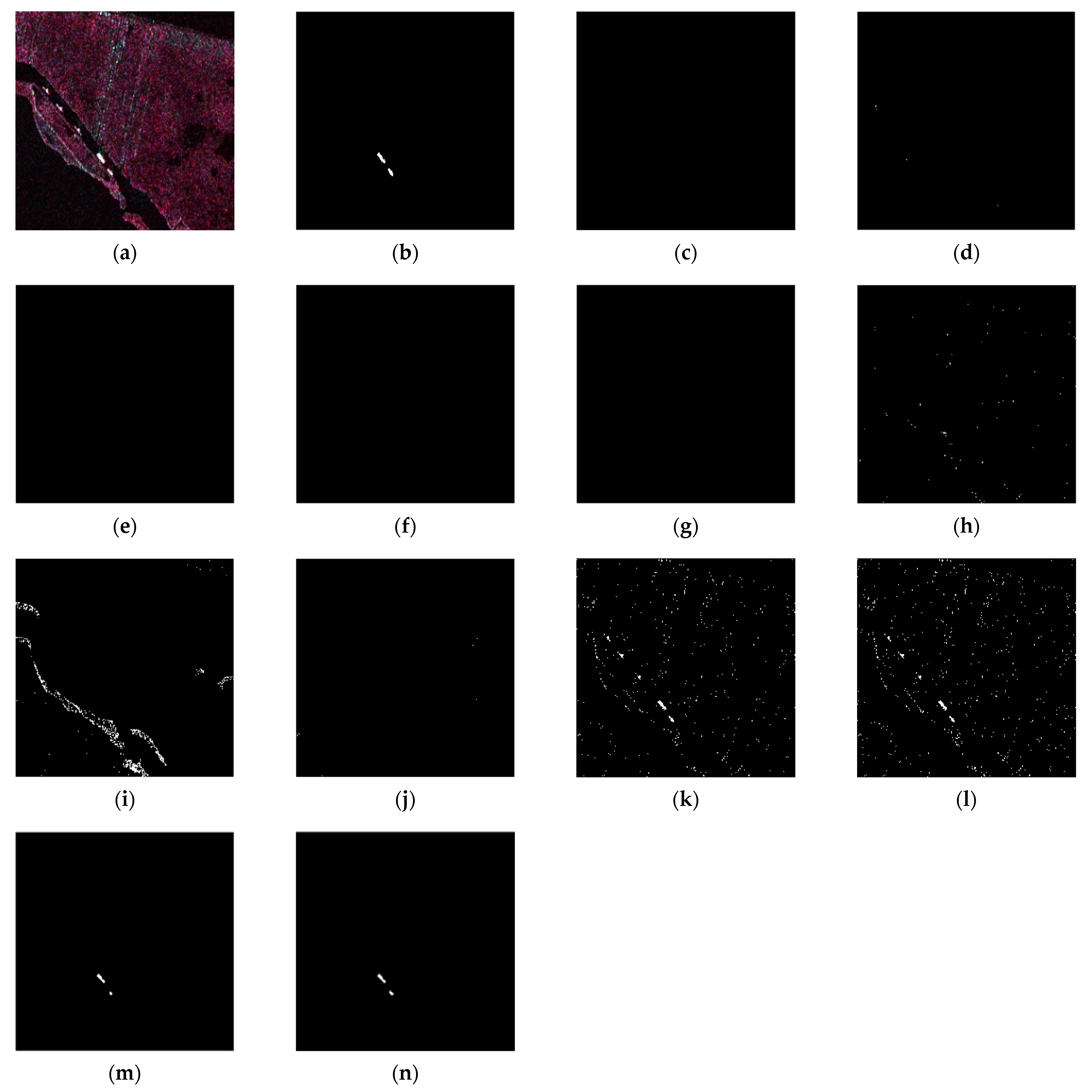
4.2. Detection Results
4.3. Analysis
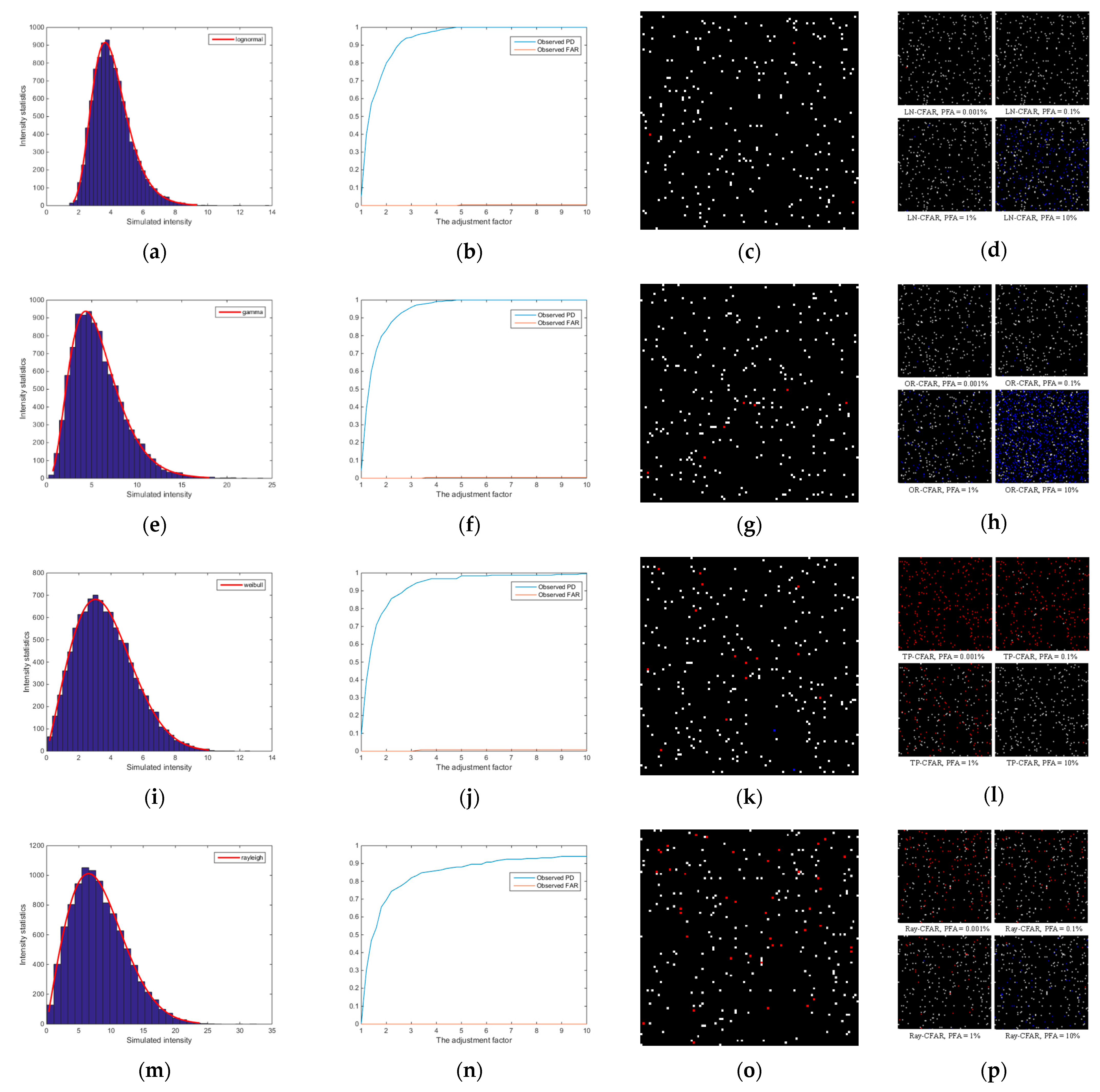
4.3.1. The Analysis of the Optimal Adjustment Factor
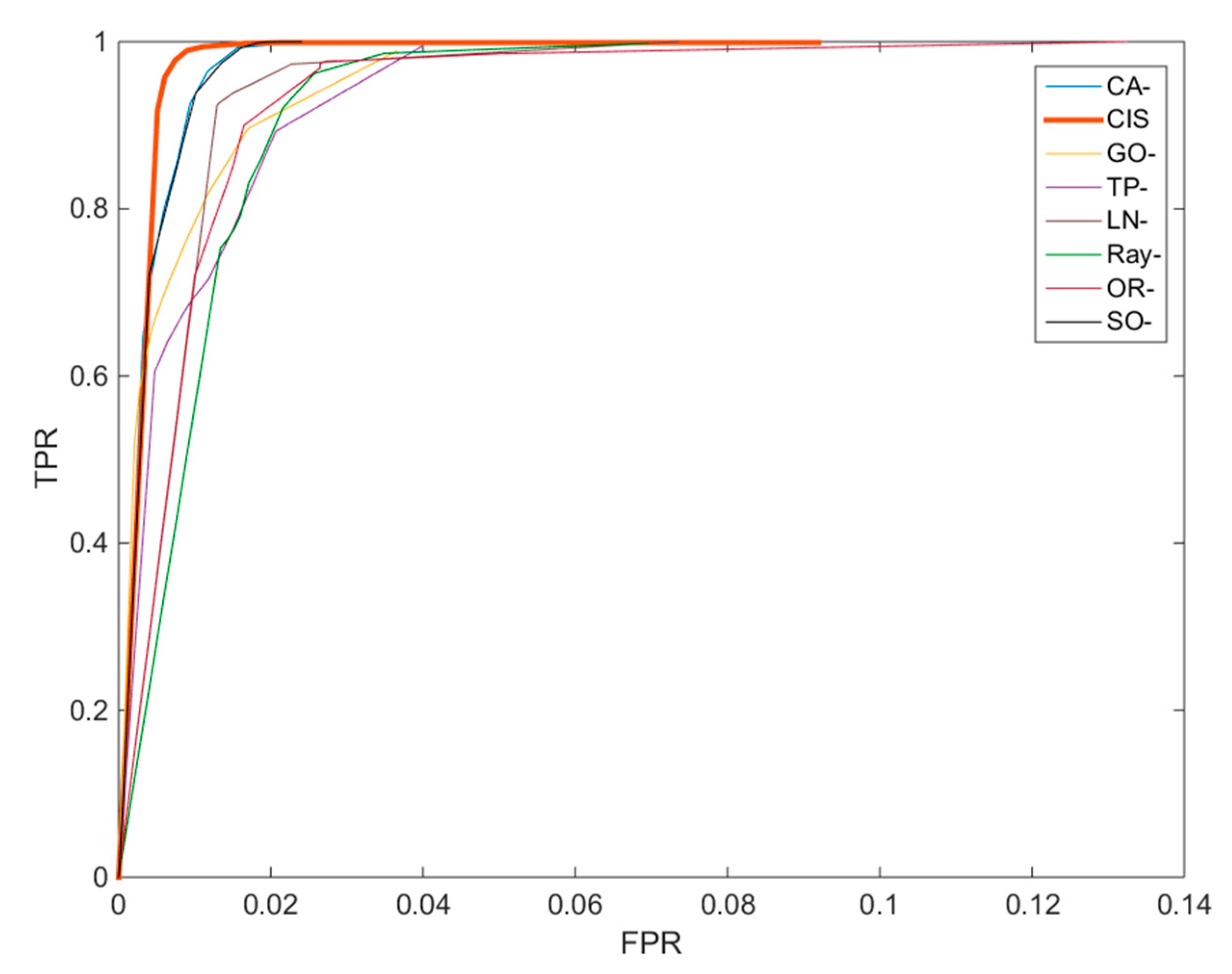
4.3.2. Detection Performance Analysis
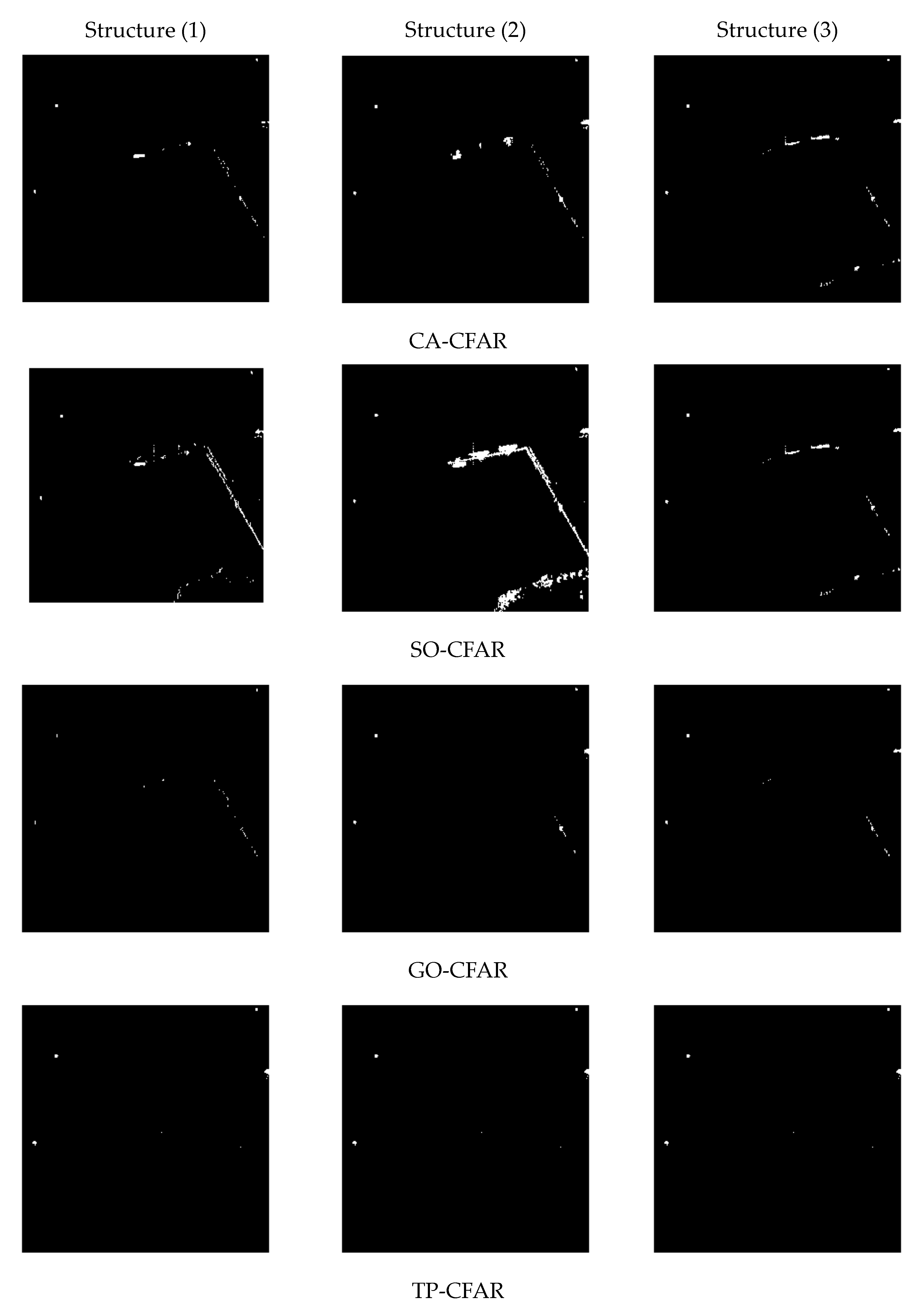
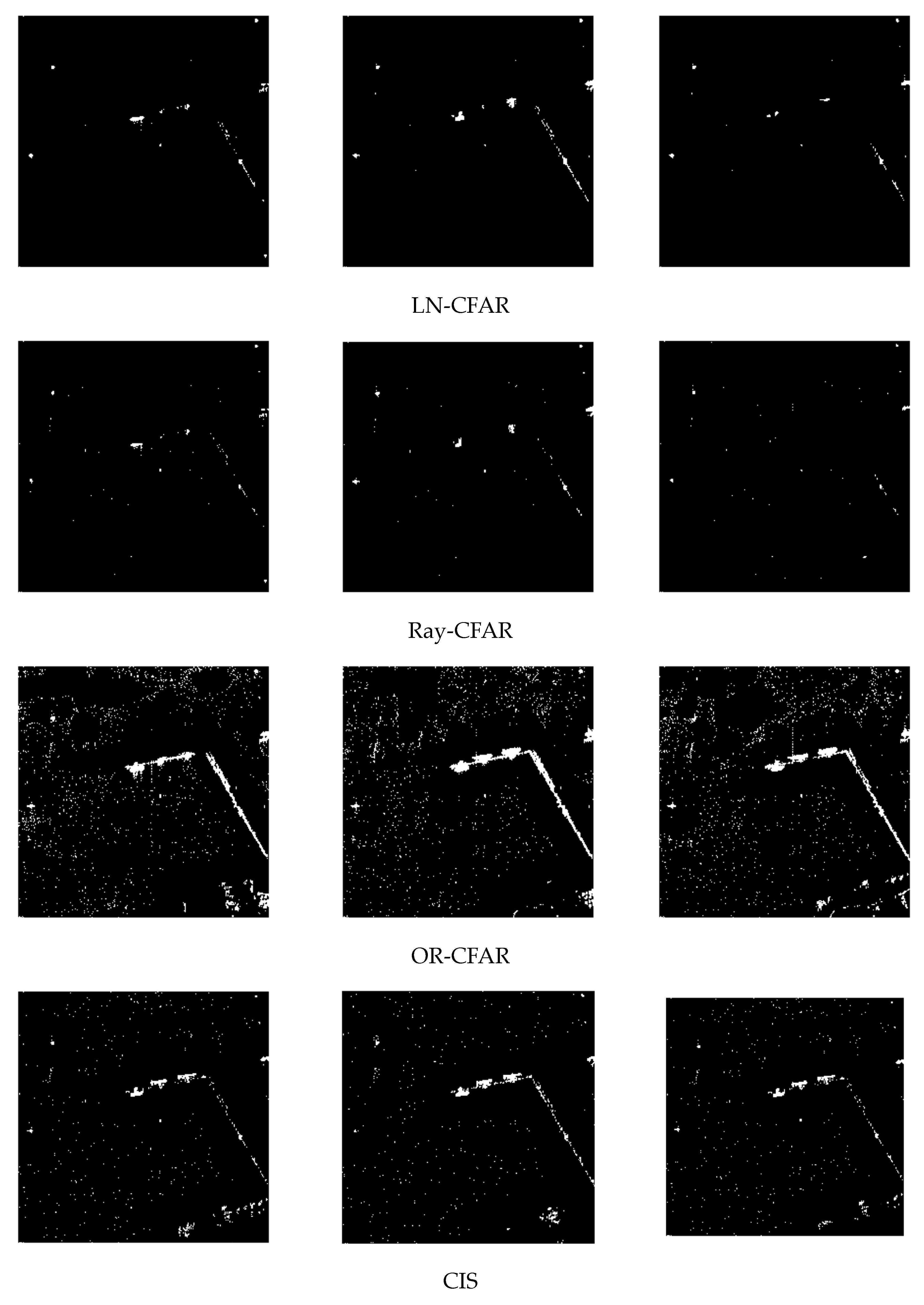
4.3.3. Analysis of the Structure of the Detection Window
4.3.4. Computational Efficiency Analysis
5. Discussion
5.1. Size of the Detection Window
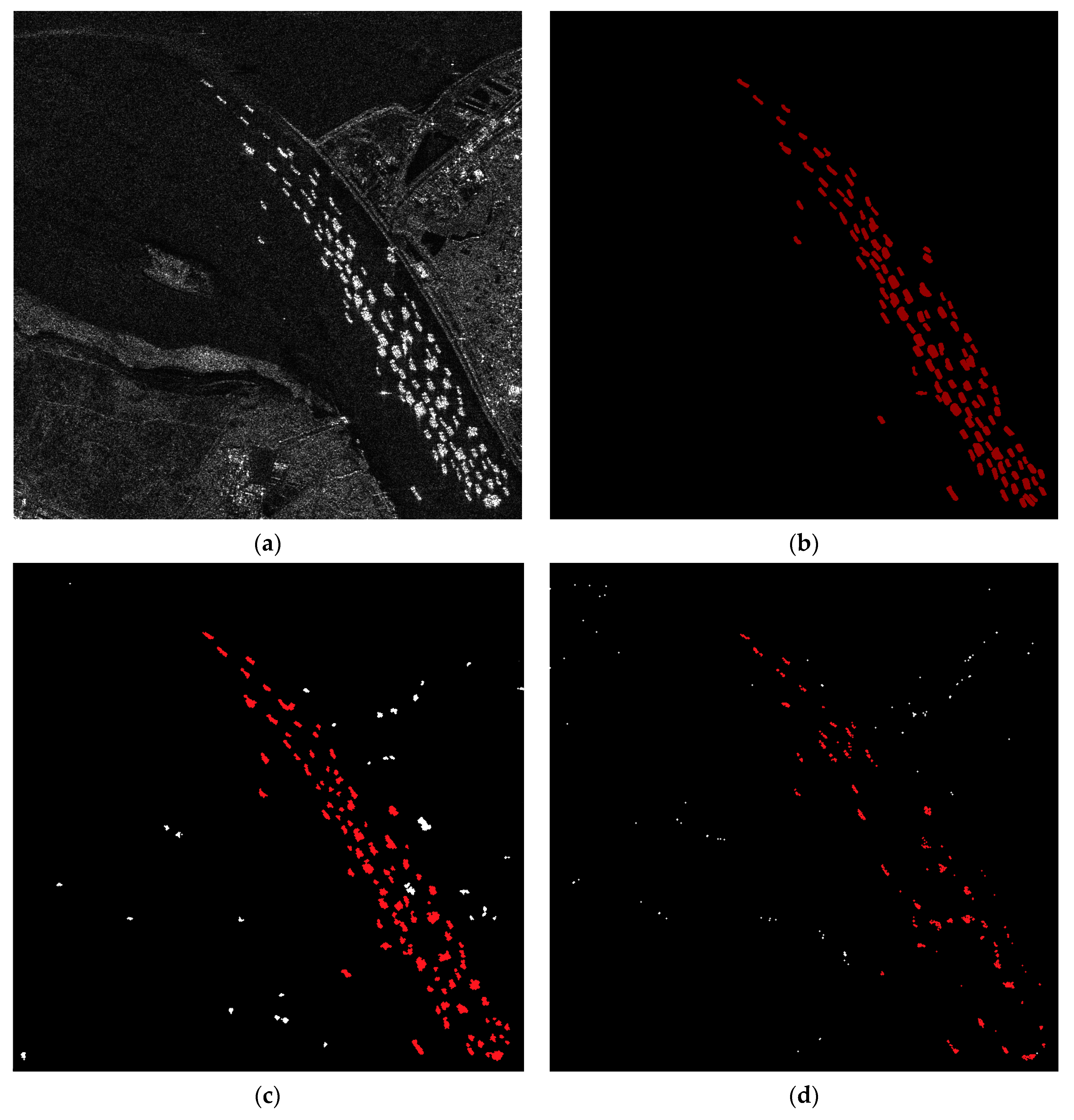
5.2. Analysis of Large-Scale Images
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ai, J.; Qi, X.; Yu, W.; Deng, Y.; Liu, F.; Shi, L. A new CFAR ship detection algorithm based on 2-D joint log-normal distribution in SAR images. IEEE Geosci. Remote Sens. Lett. 2010, 7, 806–810. [Google Scholar] [CrossRef]
- Lin, C.; Tang, S.; Zhang, L.; Guo, P. Focusing High-Resolution Airborne SAR with Topography Variations Using an Extended BPA Based on a Time/Frequency Rotation Principle. Remote Sens. 2018, 10, 1275. [Google Scholar] [CrossRef]
- Dudczyk, J.; Kawalec, A. Optimizing the minimum cost flow algorithm for the phase unwrapping process in SAR radar. Bull. Pol. Acad. Sci. Tech. Sci. 2014, 62, 511–516. [Google Scholar] [CrossRef]
- Hu, Y.; Li, Y.; Pan, Z. A Dual-Polarimetric SAR Ship Detection Dataset and a Memory-Augmented Autoencoder-Based Detection Method. Sensors 2021, 21, 8478. [Google Scholar] [CrossRef]
- Raghavan, R.S. CFAR Detection in clutter with a Kronecker covariance structure. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 619–629. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, S.; Suo, J.; Zhang, J.; Yao, T. Research on a New Comprehensive CFAR (Comp-CFAR) Processing Method. IEEE Access 2019, 7, 19401–19413. [Google Scholar] [CrossRef]
- Crisp, D.J. The state-of-the-art in ship detection in synthetic aperture radar imagery. Org. Lett. 2004, 35, 2165–2168. [Google Scholar]
- Oliver, C. A Model for non-Rayleigh scattering statistics. Opt. Acta Int. J. Opt. 1984, 31, 701–722. [Google Scholar] [CrossRef]
- Gu, X.; Fu, K.; Qiu, X. Basics of SAR Image Interpretation; Science Press: Beijing, China, 2017. [Google Scholar]
- Gao, G.; Liu, L.; Zhao, L.; Shi, G.; Kuang, G. An adaptive and fast CFAR algorithm based on automatic censoring for target detection in high-resolution SAR images. IEEE Trans. Geosci. Remote Sens. 2009, 47, 1685–1697. [Google Scholar] [CrossRef]
- Qin, X.; Zhou, S.; Zou, H.; Gao, G. A CFAR detection algorithm for generalized gamma distributed background in high-resolution SAR images. IEEE Geosci. Remote Sens. Lett. 2013, 10, 806–810. [Google Scholar] [CrossRef]
- Liao, M.; Wang, C.; Wang, Y.; Jiang, L. Using SAR Images to Detect Ships from Sea Clutter. IEEE Geosci. Remote Sens. Lett. 2008, 5, 194–198. [Google Scholar] [CrossRef]
- Mao, Y.; Yang, Y.; Ma, Z.; Li, M.; Su, H.; Zhang, J. Efficient low-cost ship detection for SAR imagery based on simplified U-Net. IEEE Access 2020, 8, 69742–69753. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhao, L.; Xiong, B.; Kuang, G. Attention receptive pyramid network for ship detection in SAR images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 2738–2756. [Google Scholar] [CrossRef]
- Lin, T.Y.; Dollár, P.; Girshick, R.; He, K.; Hariharan, B.; Belongie, S. Feature pyramid networks for object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar] [CrossRef]
- Chen, H.; Zhang, F.; Tang, B.; Yin, Q.; Sun, X. Slim and Efficient Neural Network Design for Resource-Constrained SAR Target Recognition. Remote Sens. 2018, 10, 1618. [Google Scholar] [CrossRef]
- Wang, S.; Cai, Z.; Yuan, J. Automatic SAR Ship Detection Based on Multifeature Fusion Network in Spatial and Frequency Domains. IEEE Trans. Geosci. Remote Sens. 2023, 61, 4102111. [Google Scholar] [CrossRef]
- Zhou, Z.; Cui, Z.; Cao, Z.; Yang, J. Feature-transferable pyramid network for dense multi-scale object detection in SAR images. In Proceedings of the IGARSS 2022–2022 IEEE International Geoscience and Remote Sensing Symposium, Kuala Lumpur, Malaysia, 17–22 July 2022; pp. 647–650. [Google Scholar]
- Cui, Z.; Li, Q.; Cao, Z.; Liu, N. Dense attention pyramid networks for multi-scale ship detection in SAR images. IEEE Trans. Geosci. Remote Sens. 2019, 57, 8983–8997. [Google Scholar] [CrossRef]
- Li, L.; Lv, M.; Jia, Z.; Ma, H. Sparse Representation-Based Multi-Focus Image Fusion Method via Local Energy in Shearlet Domain. Sensors 2023, 23, 2888. [Google Scholar] [CrossRef]
- Finn, H.M.; Johnson, R.S. Adaptive detection mode with threshold control as a function of spatially sampled clutter-level estimates. RCA Rev. 1968, 29, 414–464. [Google Scholar]
- Rohling, H. Radar CFAR Thresholding in clutter and multiple target situations. IEEE Trans. Aerosp. Electron. Syst. 1983, 19, 608–621. [Google Scholar] [CrossRef]
- Hansen, V.G.; Sawyers, J.H. Detectability loss due to “greatest of” selection in a cell-averaging CFAR. IEEE Trans. Aerosp. Electron. Syst. 1980, 16, 115–118. [Google Scholar] [CrossRef]
- Trunk, G.V. Range resolution of targets using automatic detectors. IEEE Trans. Aerosp. Electron. Syst. 1978, 14, 750–755. [Google Scholar] [CrossRef]
- Smith, M.E.; Varshney, P.K. Intelligent CFAR processor based on data variability. IEEE Trans. Aerosp. Electron. Syst. 2000, 36, 837–847. [Google Scholar] [CrossRef]
- Tao, D.; Anfinsen, S.N.; Brekke, C. Robust CFAR detector based on truncated statistics in multiple-target situations. IEEE Trans. Geosci. Remote Sens. 2016, 54, 117–134. [Google Scholar] [CrossRef]
- Ai, J.; Yang, X.; Zhou, F.; Dong, Z.; Jia, L.; Yan, H. A Correlation-based joint CFAR detector using adaptively-truncated statistics in SAR imagery. Sensors 2017, 17, 686. [Google Scholar] [CrossRef]
- Ai, J.; Yang, X.; Song, J.; Dong, Z.; Jia, L.; Zhou, F. An Adaptively truncated clutter-statistics-based two-parameter CFAR Detector in SAR imagery. IEEE J. Ocean. Eng. 2018, 43, 267–279. [Google Scholar] [CrossRef]
- Leng, X.; Ji, K.; Xing, X.; Zhou, S.; Zou, H. Area ratio invariant feature group for ship detection in SAR imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 2376–2388. [Google Scholar] [CrossRef]
- Cui, Y.; Zhou, G.; Yang, J.; Yamaguchi, Y. On the iterative censoring for target detection in SAR images. IEEE Geosci. Remote Sens. Lett. 2011, 8, 641–645. [Google Scholar] [CrossRef]
- Chang, J.; Zhao, J.; Li, N. Improved 2P-CFAR SAR ship detection method. Foreign Electron. Meas. Technol. 2021, 40, 7–12. [Google Scholar]
- Wu, R. Two-Parameter CFAR Ship Detection Algorithm Based on Rayleigh Distribution in SAR Images. Preprints 2021, 2021120280. [Google Scholar] [CrossRef]
- Ai, J.; Cao, Z.; Mao, Y.; Wang, Z.; Wang, F.; Jin, J. An Improved Bilateral CFAR Ship Detection Algorithm for SAR Image in Complex Environment. J. Radars 2021, 10, 499–515. [Google Scholar]
- Ai, J.; Luo, Q.; Yang, X.; Yin, Z.; Xu, H. Outliers-Robust CFAR Detector of Gaussian Clutter Based on the Truncated-Maximum-Likelihood-Estimator in SAR Imagery. IEEE Trans. Intell. Transp. 2020, 21, 2039–2049. [Google Scholar] [CrossRef]
- Bocquet, S.; Rosenberg, L.; Gierull, C.H. Parameter Estimation for a Compound Radar Clutter Model With Trimodal Discrete Texture. IEEE Trans. Geosci. Remote Sens. 2020, 58, 7062–7073. [Google Scholar] [CrossRef]
- Sana, S.; Ahsan, F.; Khan, S. Design and implementation of multi-mode CFAR processor. In Proceedings of the 19th International Multi-Topic Conf (INMIC), Islamabad, Pakistan, 2 February 2017. [Google Scholar]
- Zhu, C.; Zhou, H.; Wang, R.; Guo, J. A Novel hierarchical method of ship detection from spaceborne optical image based on shape and texture features. IEEE Trans. Geosci. Remote Sens. 2010, 48, 3446–3456. [Google Scholar] [CrossRef]
- Schwegmann, C.P.; Kleynhans, W.; Salmon, B.P. Synthetic aperture radar ship detection using haar-like features. IEEE Geosci. Remote Sens. Lett. 2017, 14, 154–158. [Google Scholar] [CrossRef]
- Jiao, J.; Zhang, Y.; Sun, H.; Yang, X.; Gao, X.; Hong, W.; Fu, K.; Sun, X. A Densely connected end-to-end neural network for multiscale and Multiscene SAR ship detection. IEEE Access 2018, 6, 20881–20892. [Google Scholar] [CrossRef]
- Fawcett, T. An Introduction to ROC analysis. Pattern Recogn. Lett. 2006, 27, 861–874. [Google Scholar] [CrossRef]
- Wei, S.; Zeng, X.; Qu, Q.; Wang, M.; Su, H.; Shi, J. HRSID: A High-Resolution SAR Images Dataset for Ship Detection and Instance Segmentation. IEEE Access 2020, 8, 120234–120254. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Information | The Original Sentinel-1 Imagery |
|---|---|
| Region | Shanghai, the Suez Canal, etc. |
| Band | C-band |
| Imaging mode | Interferometric wide swath (IW) mode |
| Resolution | 2.3 m × 14.0 m (Rg. × Az.) |
| Polarization | VV + VH |
| Number of looks | Single |
| Production level | L1A |
| Information | DSSDD |
|---|---|
| Open date | 3 November 2021 |
| Enhancement | Pseudo-color |
| Quantity | 1236 |
| Image size | 256 × 256 pixels |
| Channel (R,G,B) | |C11|, |C12|, |C22| elements of polarimetric covariance matrix |
| Bit depth | 8-bit, 16-bit |
| Method | Test | Guard | Background |
|---|---|---|---|
| CA-CFAR | 1 × 1 | 21 × 21 | 41 × 41 |
| SO-CFAR | 1 × 1 | 21 × 21 | 41 × 41 |
| GO-CFAR | 1 × 1 | 21 × 21 | 41 × 41 |
| TP-CFAR | 1 × 1 | 21 × 21 | 41 × 41 |
| LN-CFAR | 1 × 1 | 21 × 21 | 41 × 41 |
| Ray-CFAR | 1 × 1 | 40 × 40 | 41 × 41 |
| OR-CFAR | 1 × 1 | -- | 41 × 41 |
| CIS | 1 × 1 | 21 × 21 | 41 × 41 |
| Model | Mean | Standard Deviation |
|---|---|---|
| Log-normal | 4.1 | 1.4 |
| Gamma | 5.7 | 2.9 |
| Weibull | 3.6 | 1.8 |
| Rayleigh | 8.2 | 4.3 |
| Condition | Method | Figure 4a | Figure 5a | Figure 6a | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| PA | PR | PP | PA | PR | PP | PA | PR | PP | ||
| PFA = 0.001% | CA-CFAR | 97.9 | 86.2 | 60.8 | 99.8 | 0.0 | 0.0 | 99.0 | 45.9 | 29.8 |
| SO-CFAR | 97.4 | 99.3 | 57.5 | 99.8 | 0.0 | 0.0 | 96.4 | 99.1 | 15.5 | |
| GO-CFAR | 97.7 | 71.7 | 65.5 | 99.8 | 0.0 | 0.0 | 99.2 | 7.28 | 9.97 | |
| TP-CFAR | 98.5 | 69.2 | 56.2 | 99.8 | 0.0 | 0.0 | 99.2 | 5.24 | 7.36 | |
| LN-CFAR | 98.6 | 92.5 | 56.1 | 99.6 | 0.0 | 0.0 | 98.9 | 30.8 | 21.5 | |
| Ray-CFAR | 98.5 | 73.2 | 57.1 | 99.4 | 33.9 | 15.4 | 98.6 | 24.5 | 16.1 | |
| OR-CFAR (γ = 2.0) | 97.3 | 95.7 | 39.1 | 97.4 | 20.3 | 2.9 | 92.9 | 32.7 | 4.3 | |
| PFA = 0.1% | CA-CFAR | 96.9 | 99.3 | 53.3 | 99.8 | 0.7 | 1.3 | 98.2 | 91.3 | 26.2 |
| SO-CFAR | 95.8 | 100.0 | 45.4 | 99.3 | 6.2 | 3.9 | 94.7 | 100.0 | 11.0 | |
| GO-CFAR | 97.1 | 81.6 | 55.8 | 99.8 | 0.0 | 0.0 | 98.8 | 14.2 | 12.6 | |
| TP-CFAR | 96.3 | 77.3 | 48.2 | 99.7 | 14.1 | 17.6 | 98.9 | 9.7 | 10.0 | |
| LN-CFAR | 96.9 | 93.7 | 53.1 | 99.5 | 2.67 | 2.37 | 98.7 | 48.8 | 24.9 | |
| Ray-CFAR | 98.4 | 83.7 | 53.4 | 98.3 | 69.2 | 9.9 | 97.6 | 68.7 | 18.6 | |
| OR-CFAR (γ = 2.0) | 96.8 | 95.8 | 35.7 | 96.9 | 21.2 | 2.5 | 91.9 | 37.3 | 4.1 | |
| PFA = 1% | CA-CFAR | 95.5 | 99.7 | 43.8 | 99.46 | 63.8 | 25.1 | 96.8 | 97.3 | 17.0 |
| SO-CFAR | 93.8 | 100.0 | 35.6 | 97.4 | 67.4 | 6.8 | 93.1 | 100 | 8.6 | |
| GO-CFAR | 96.4 | 89.6 | 48.6 | 99.7 | 27.3 | 27.7 | 98.5 | 46.4 | 21.5 | |
| TP-CFAR | 95.7 | 89.3 | 43.7 | 99.1 | 49.5 | 15.2 | 98.4 | 33.1 | 17.5 | |
| LN-CFAR | 95.6 | 94.8 | 43.5 | 98.5 | 51.0 | 9.54 | 97.6 | 96.4 | 21.6 | |
| Ray-CFAR | 93.3 | 89.8 | 49.3 | 95.8 | 75.0 | 4.43 | 95.1 | 88.9 | 11.3 | |
| OR-CFAR (γ = 2.0) | 90.5 | 95.3 | 25.8 | 95.0 | 21.3 | 1.59 | 87.6 | 71.3 | 4.1 | |
| CIS (λ = 3.0) | 98.2 | 97.5 | 63.3 | 99.8 | 71.1 | 52.5 | 99.3 | 74.0 | 43.1 | |
| Method | No. | Test | Guard | Background |
|---|---|---|---|---|
| CIS | (1) | 1 × 1 | -- | 41 × 41 |
| (2) | 1 × 1 | 21 × 21 | 41 × 41 | |
| (3) | 1 × 1 | 40 × 40 | 41 × 41 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, M.; Zhu, B.; Ma, H. A New Synthetic Aperture Radar Ship Detector Based on Clutter Intensity Statistics in Complex Environments. Remote Sens. 2024, 16, 664. https://doi.org/10.3390/rs16040664
Liu M, Zhu B, Ma H. A New Synthetic Aperture Radar Ship Detector Based on Clutter Intensity Statistics in Complex Environments. Remote Sensing. 2024; 16(4):664. https://doi.org/10.3390/rs16040664
Chicago/Turabian StyleLiu, Minqin, Bo Zhu, and Hongbing Ma. 2024. "A New Synthetic Aperture Radar Ship Detector Based on Clutter Intensity Statistics in Complex Environments" Remote Sensing 16, no. 4: 664. https://doi.org/10.3390/rs16040664
APA StyleLiu, M., Zhu, B., & Ma, H. (2024). A New Synthetic Aperture Radar Ship Detector Based on Clutter Intensity Statistics in Complex Environments. Remote Sensing, 16(4), 664. https://doi.org/10.3390/rs16040664