
Development and Calibration of 532 nm Standard Aerosol Lidar with Low Blind Area

 and
and 
Abstract
1. Introduction
2. REAL with Low Bow Blind Area and High Dynamic Gain
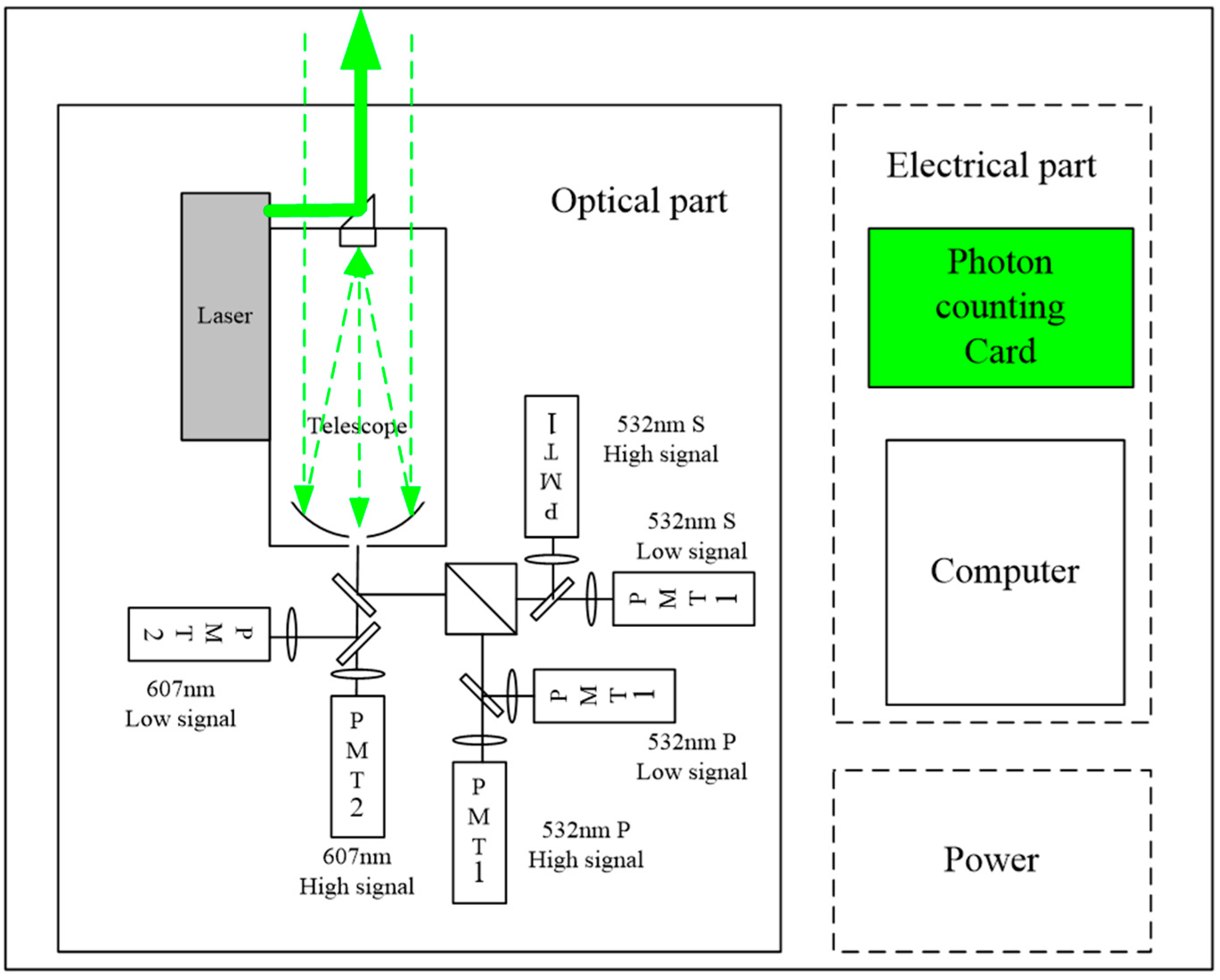
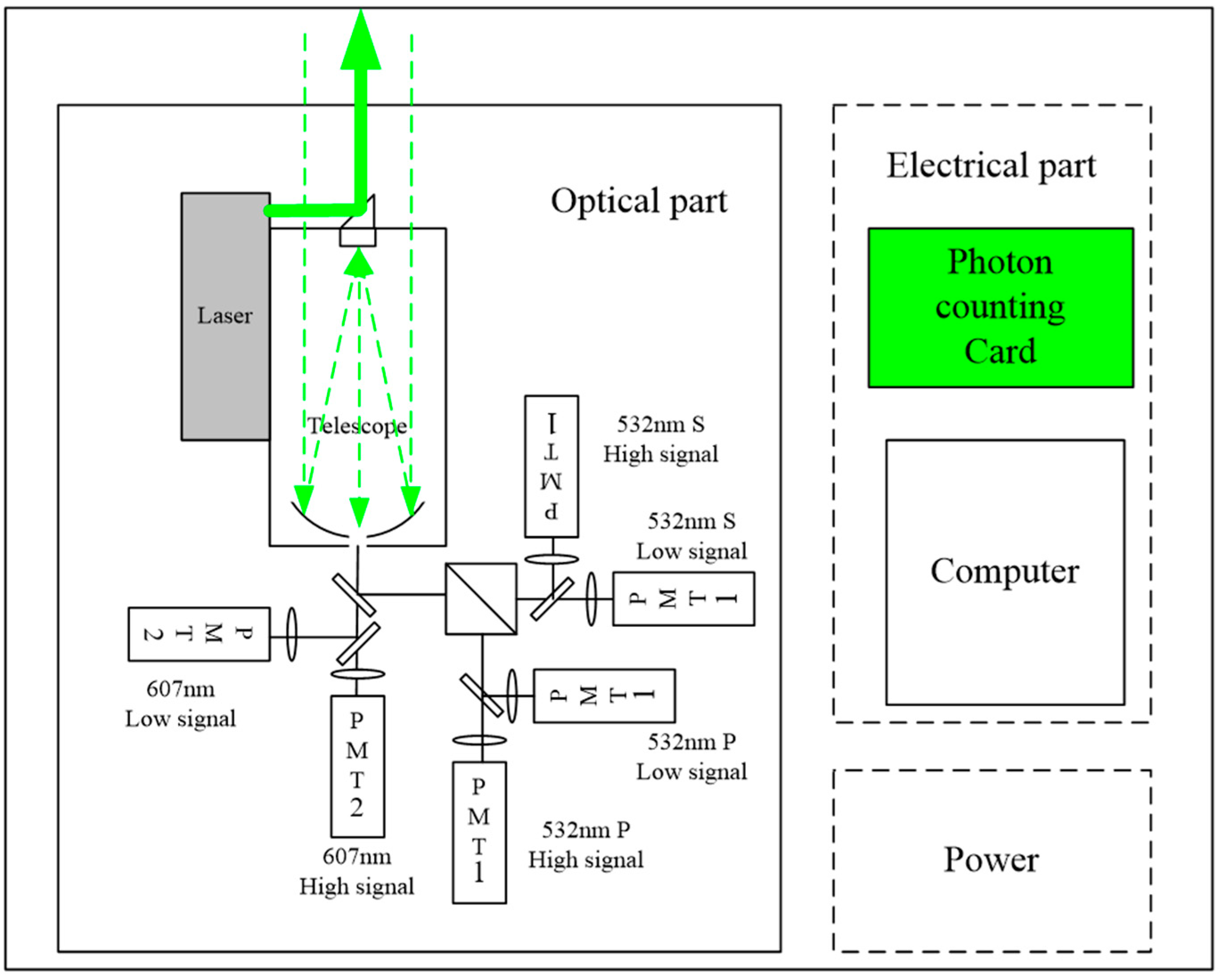
2.1. Six-Channel Raman–Mie Scattering Detection
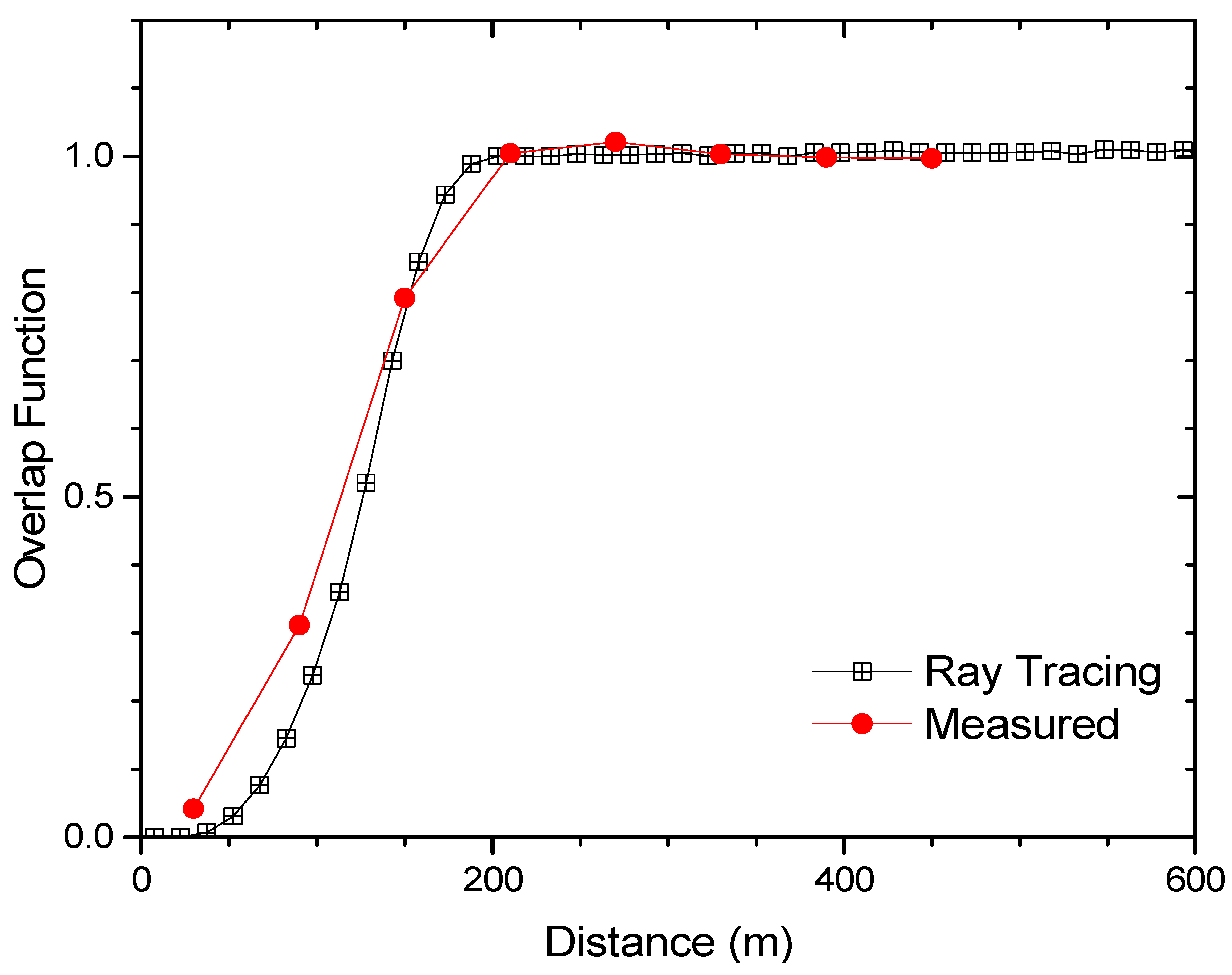
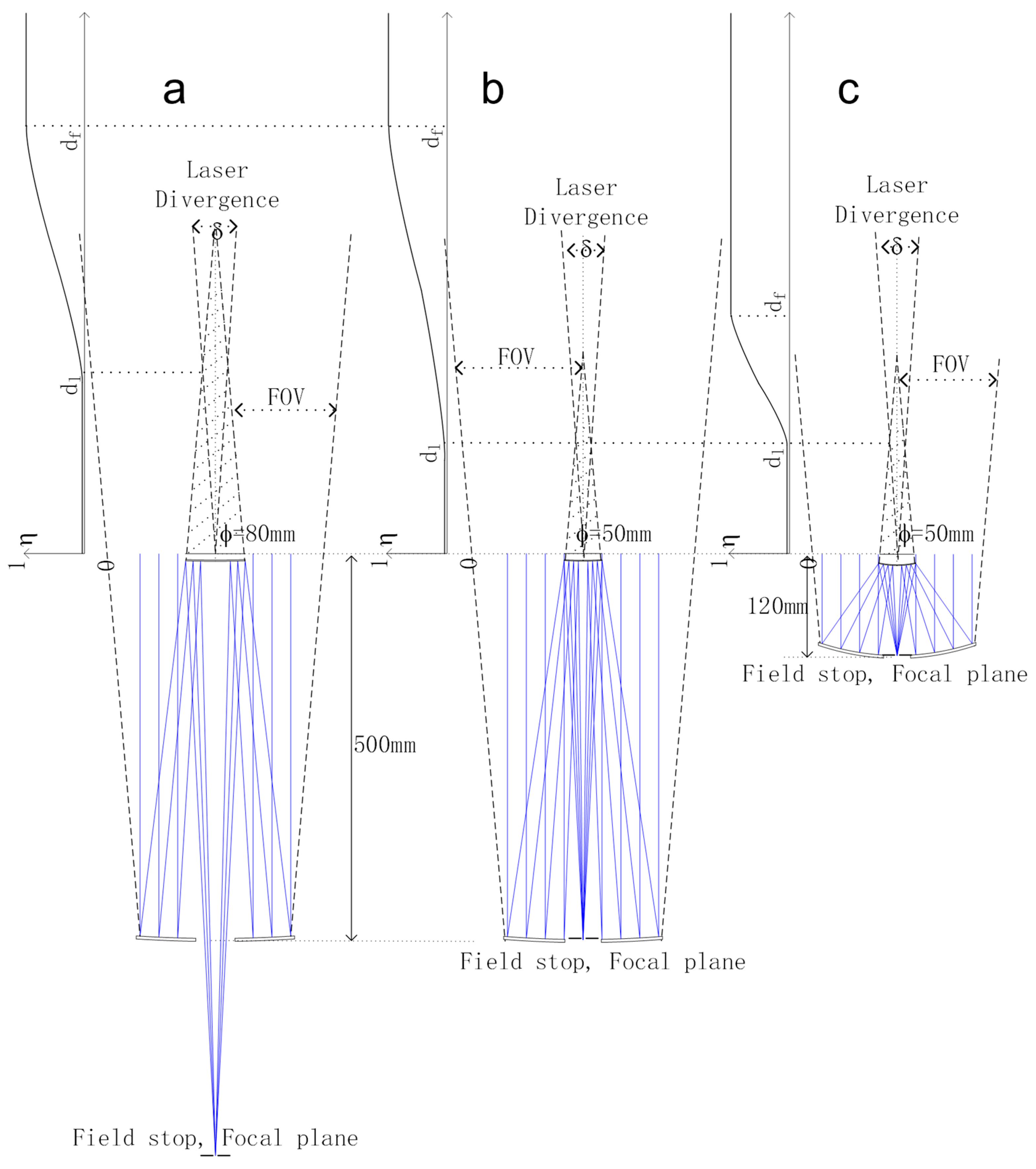
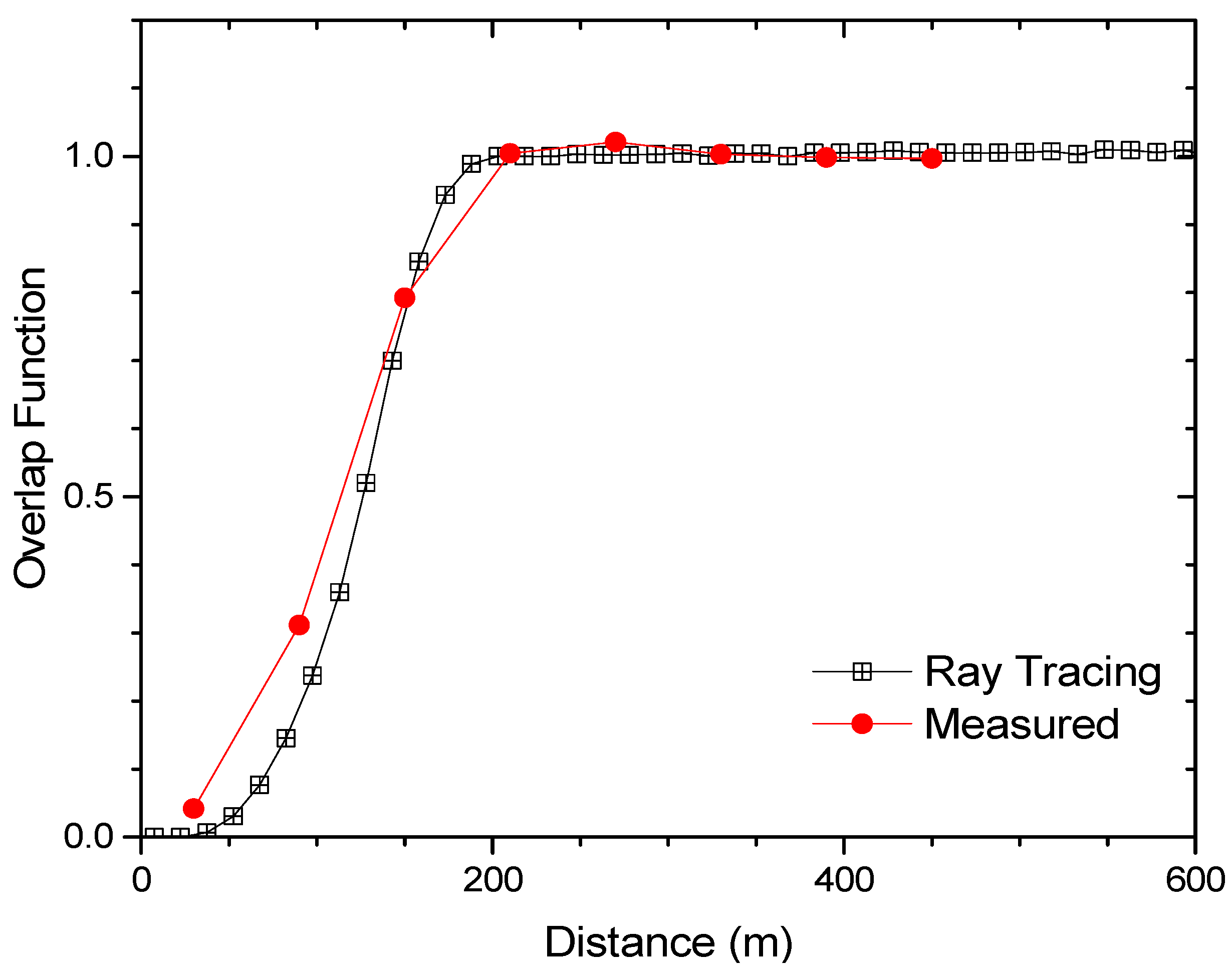
2.2. Low Blind Zone Optical Design
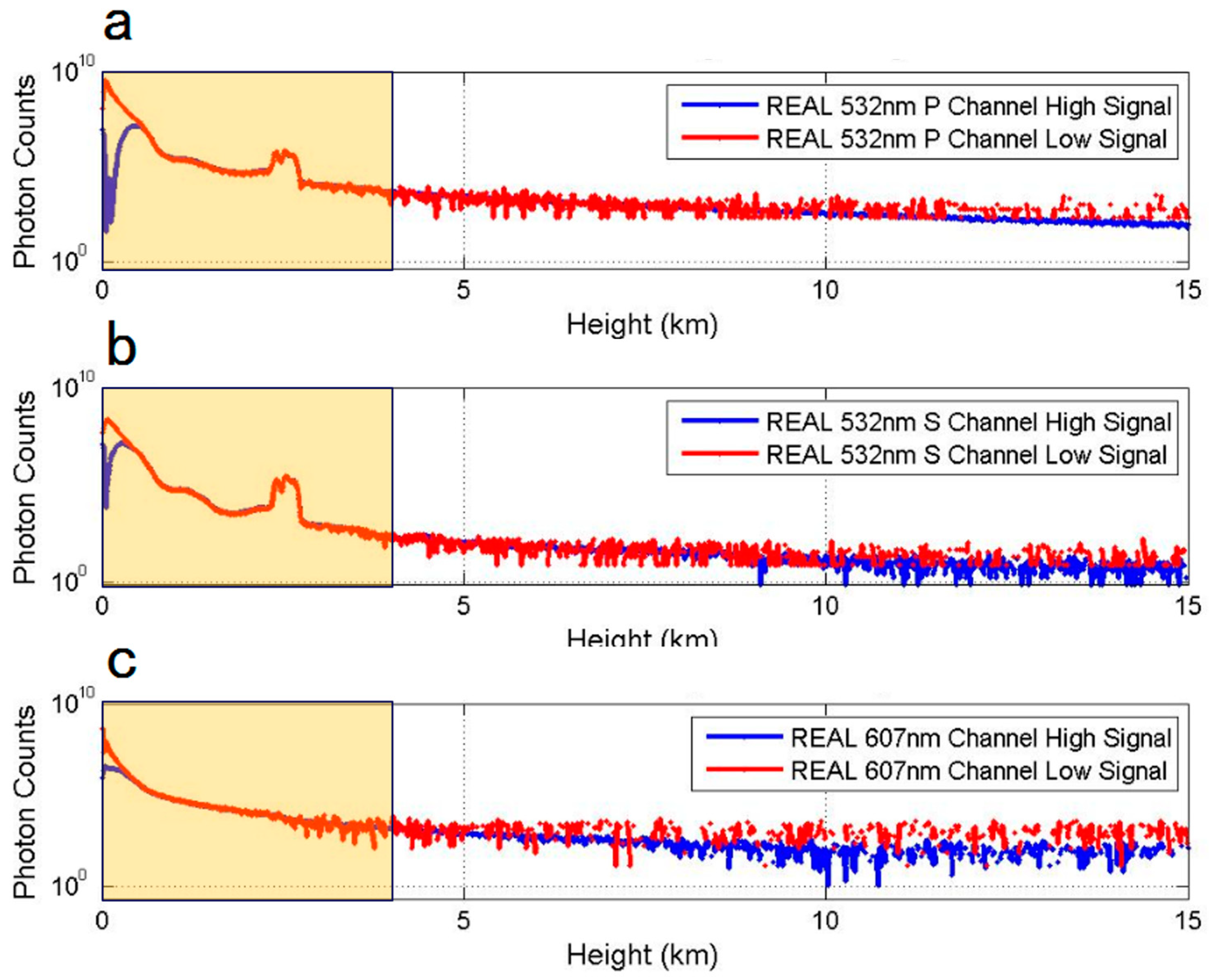
2.3. Fusion of High and Low Space Signals and Optimization of Dynamic Range
3. REAL Self-Test Data Analysis
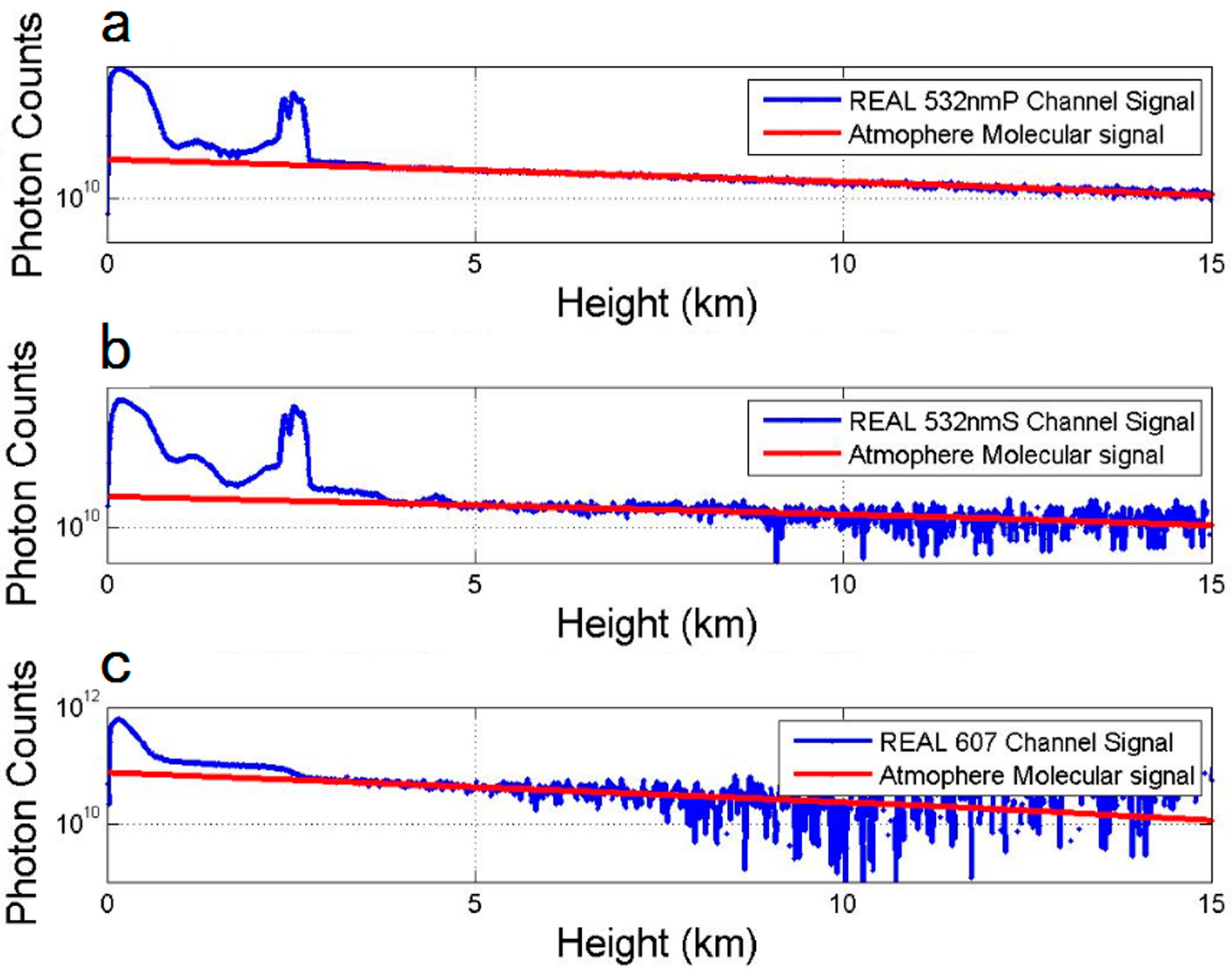
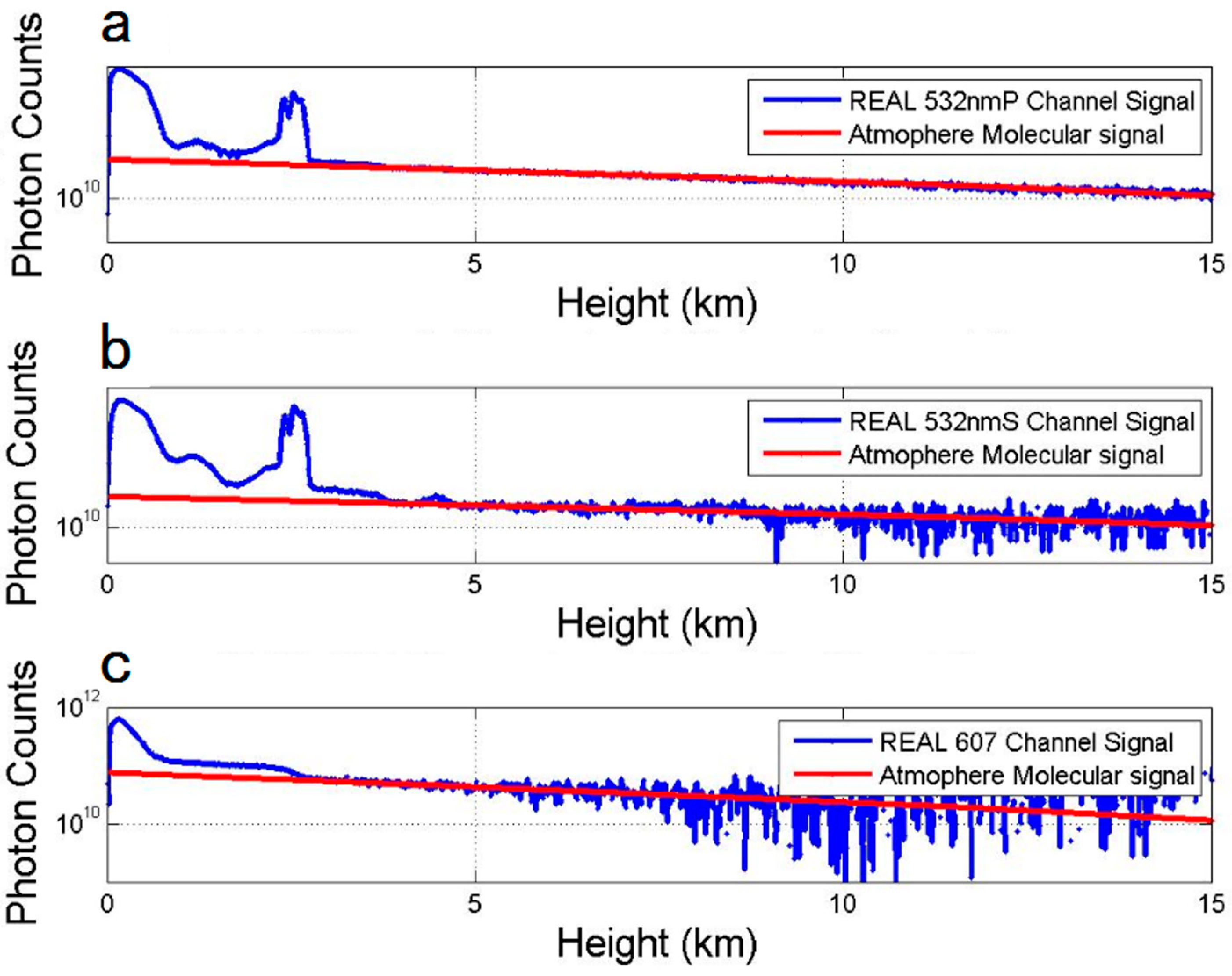
3.1. Consistency Analysis between REAL Echo Signal and Atmospheric Molecular Model Signal
3.2. REAL Low Blind Zone Data Analysis
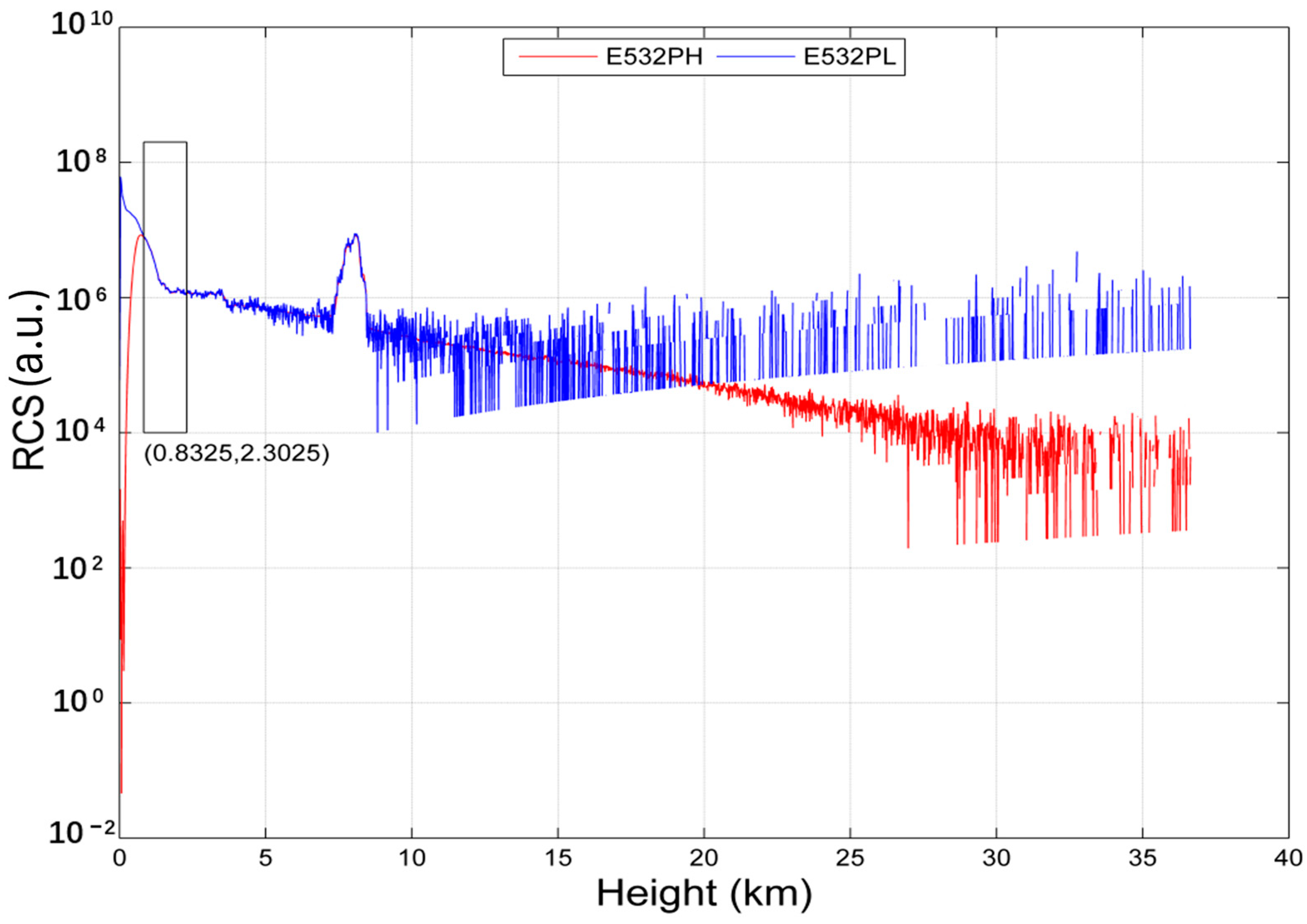
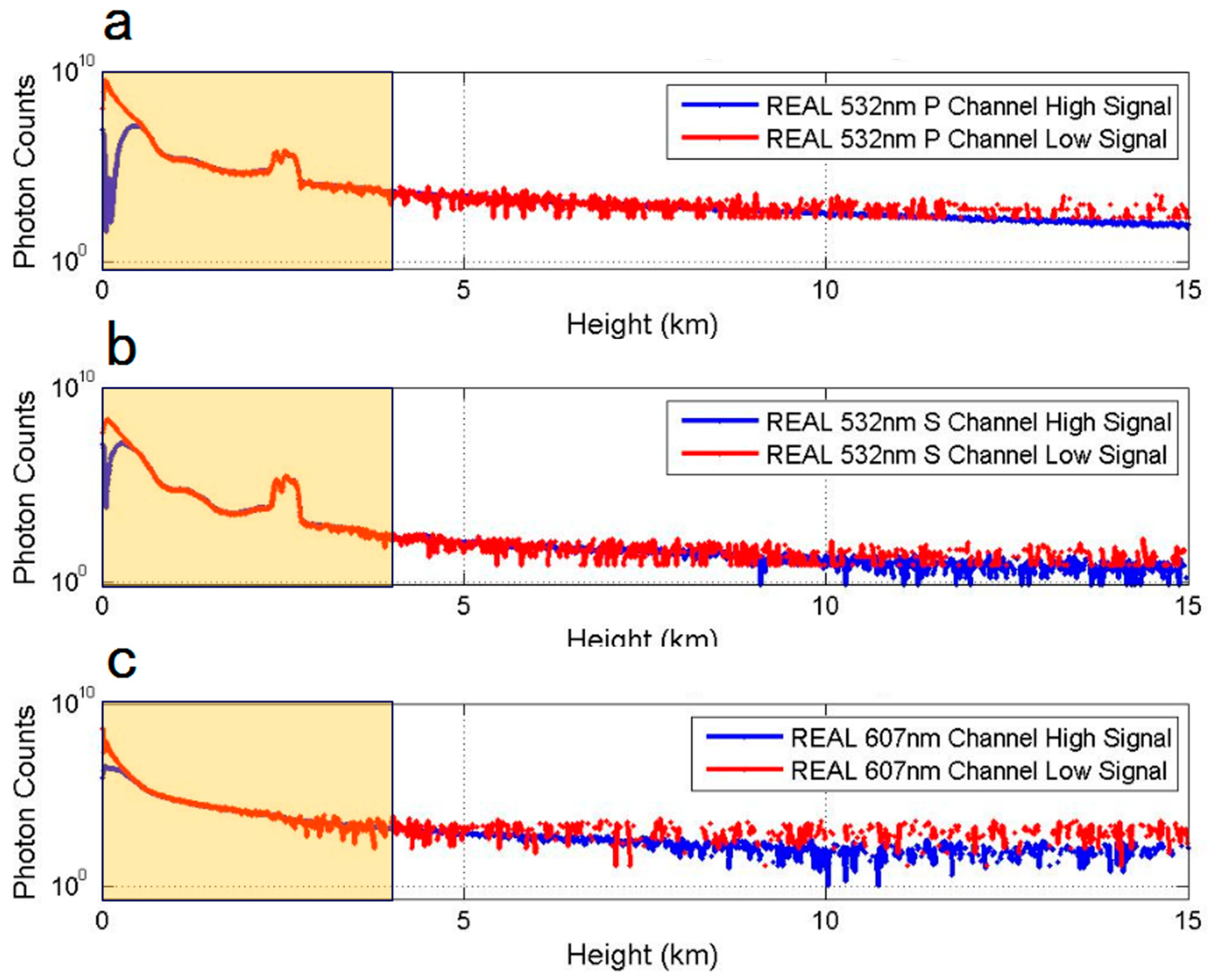
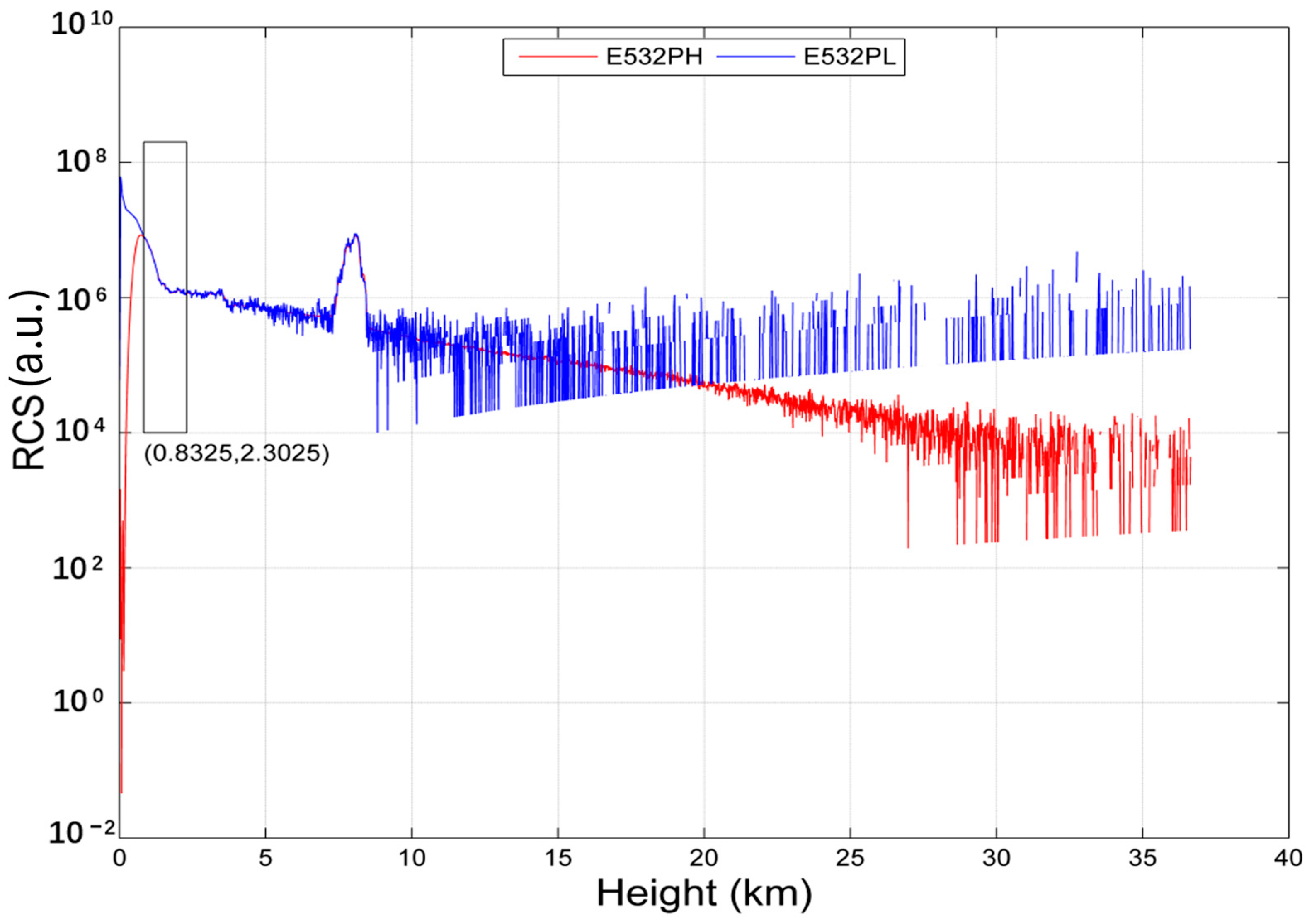
3.3. Dynamic Range Analysis of REAL Signal
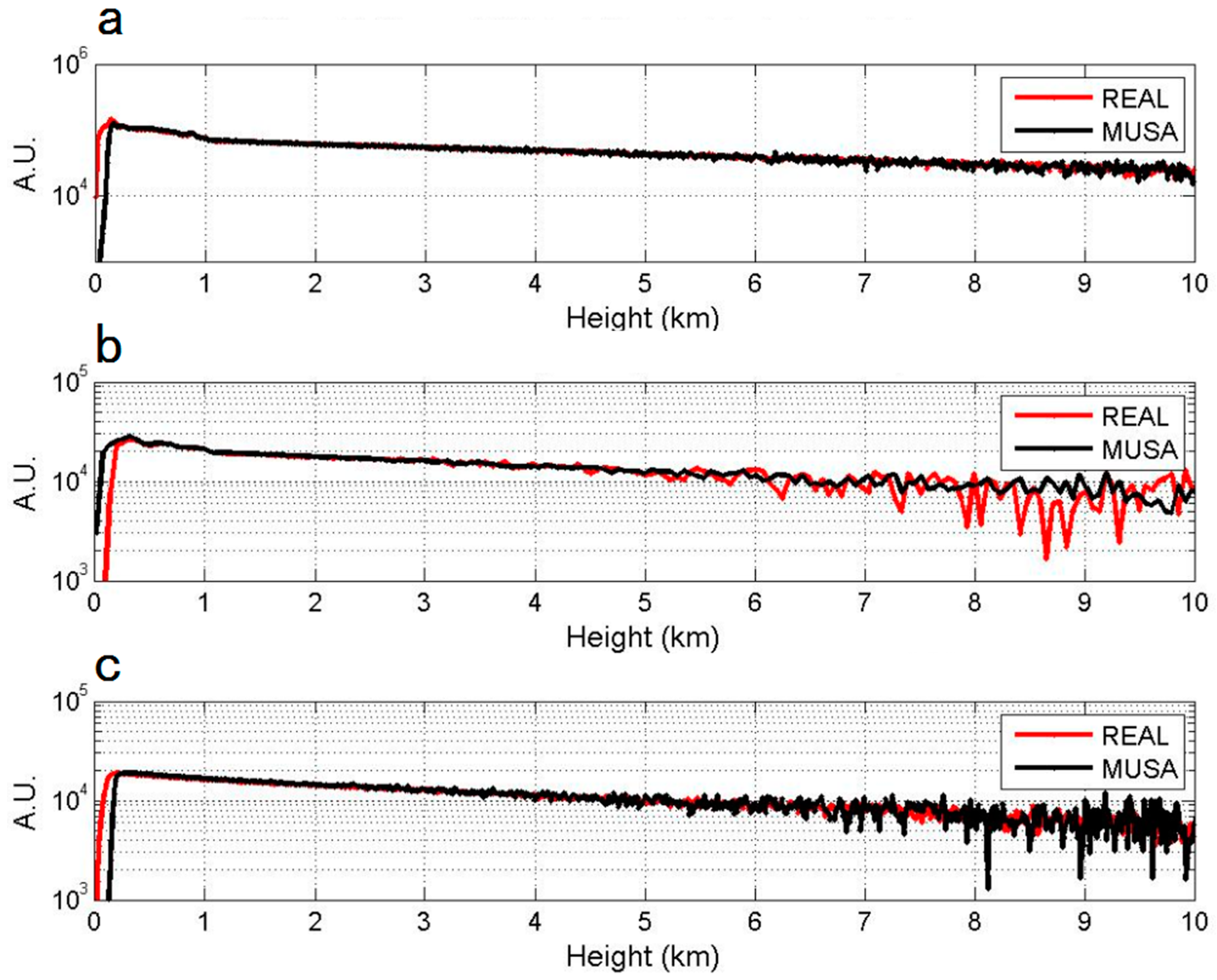
4. Comparative Analysis of REAL and MUSA Detection Data
4.1. Data Analysis Method
4.2. Comparative Analysis of Original Data
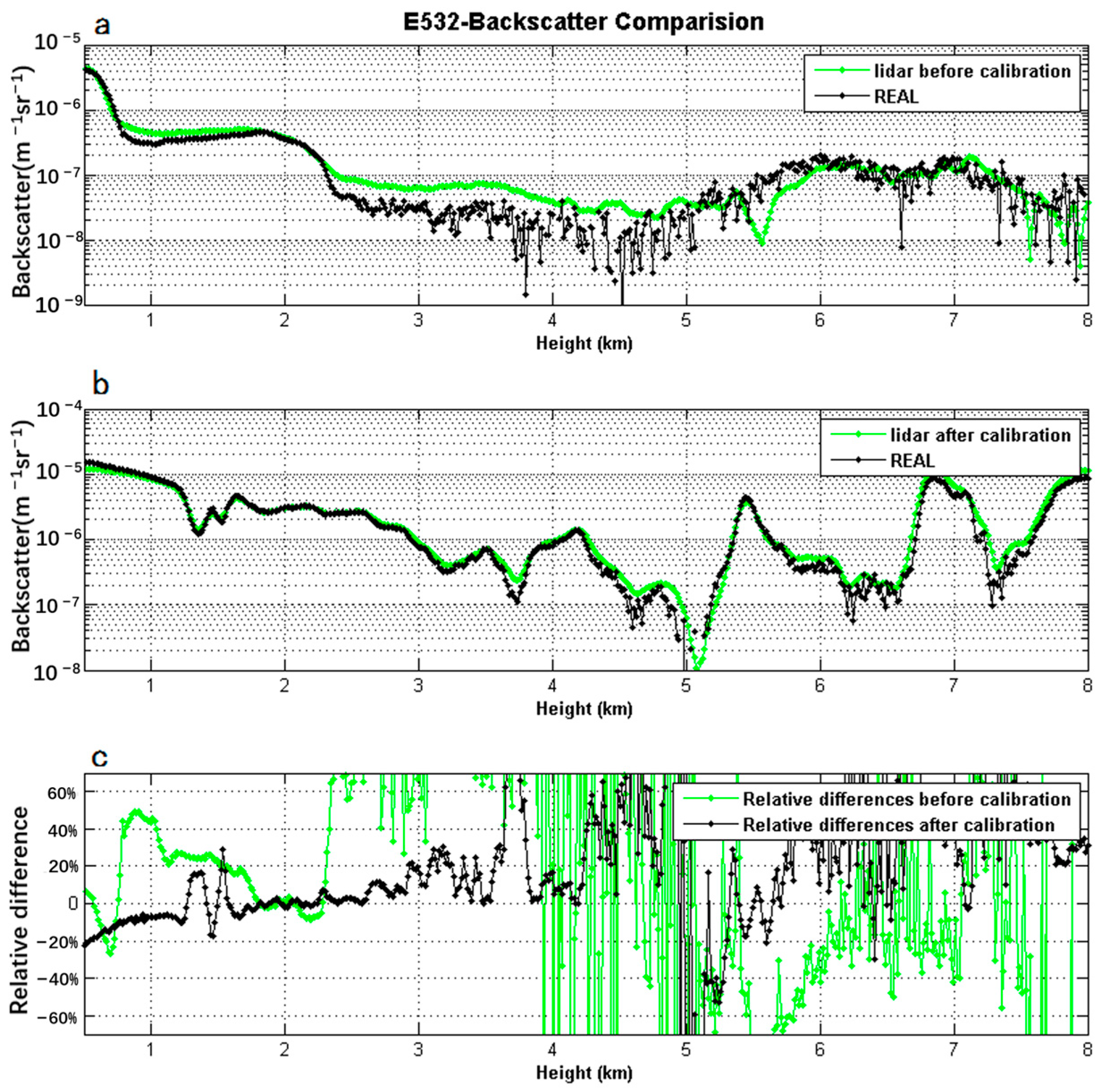
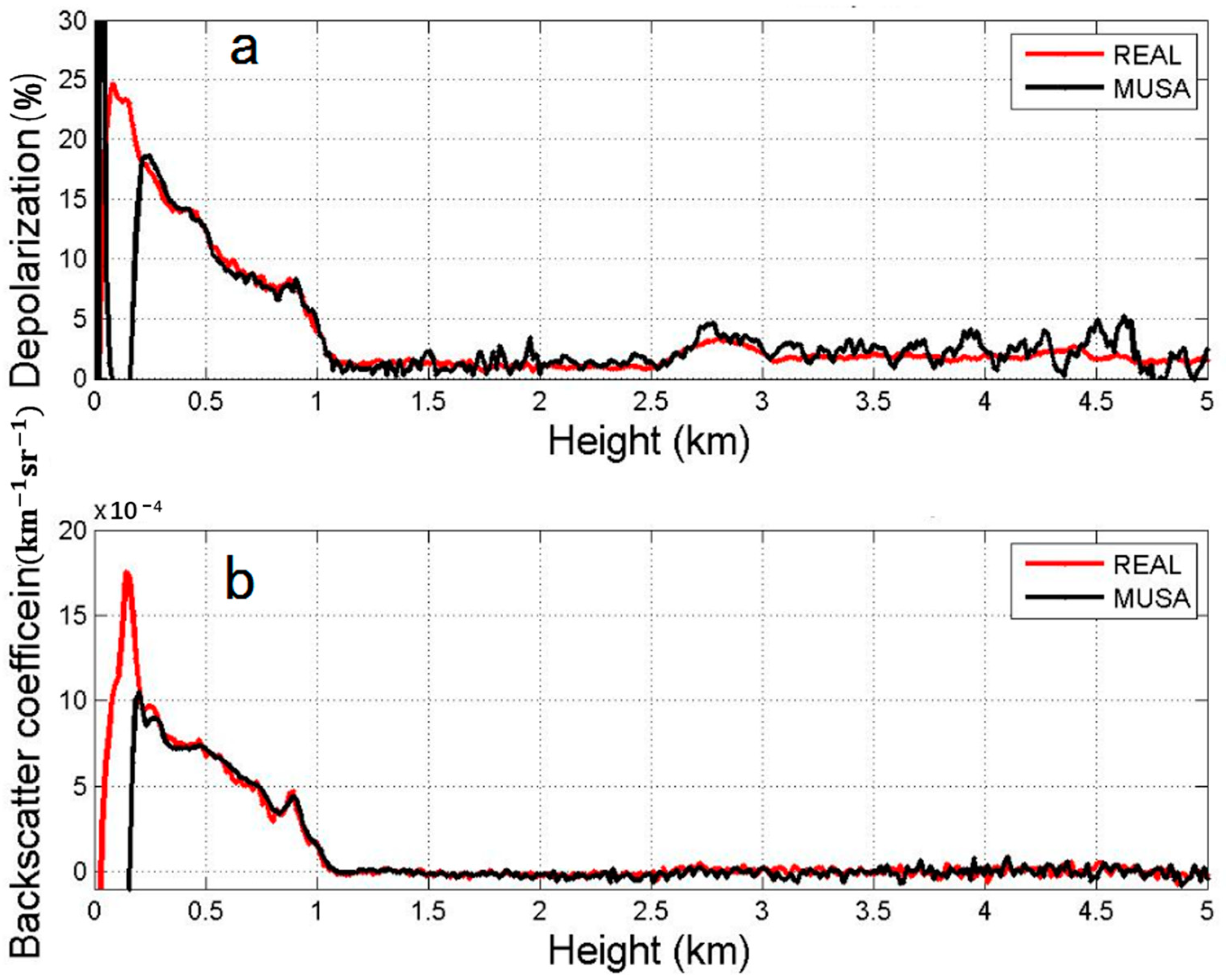
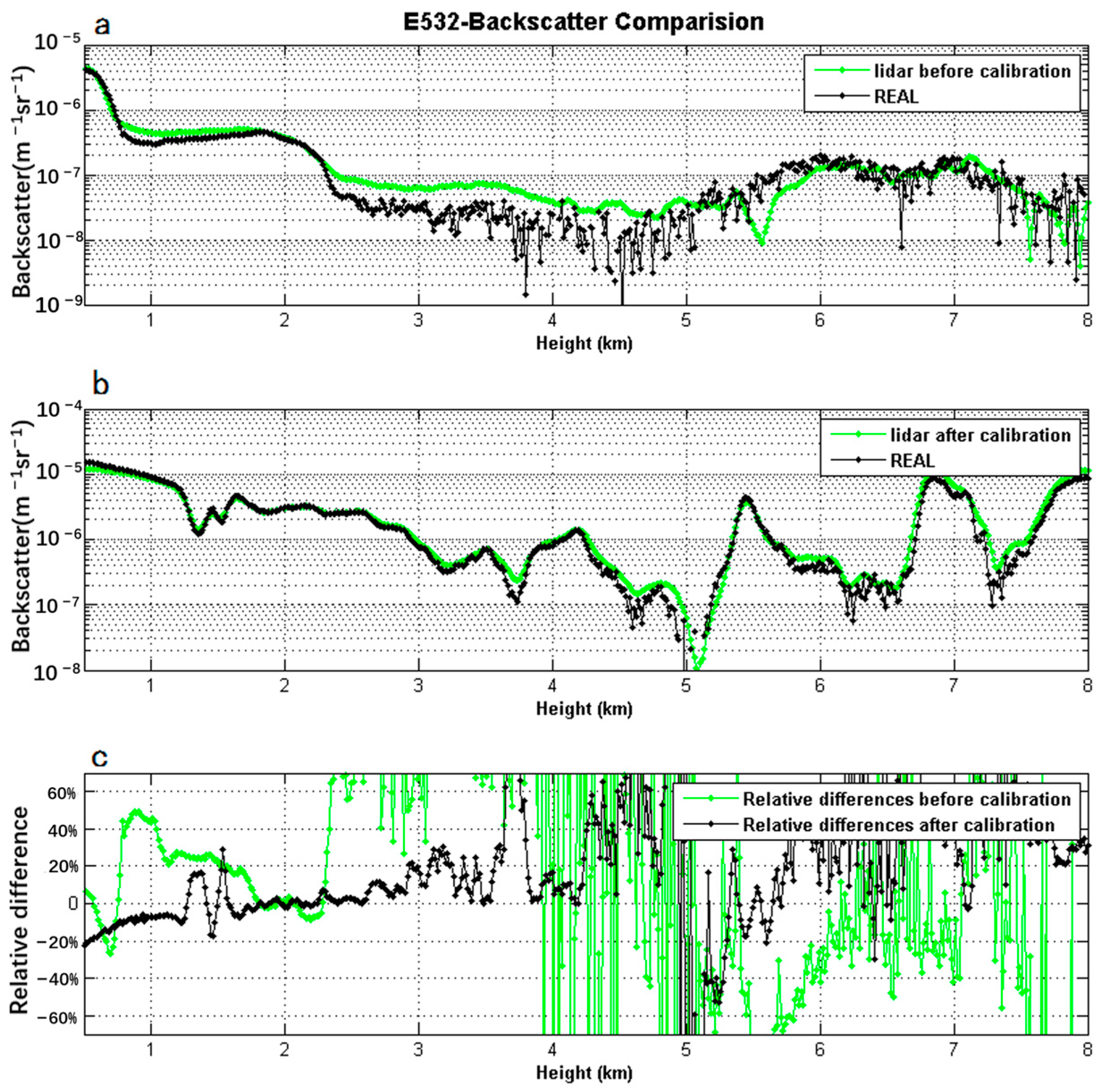
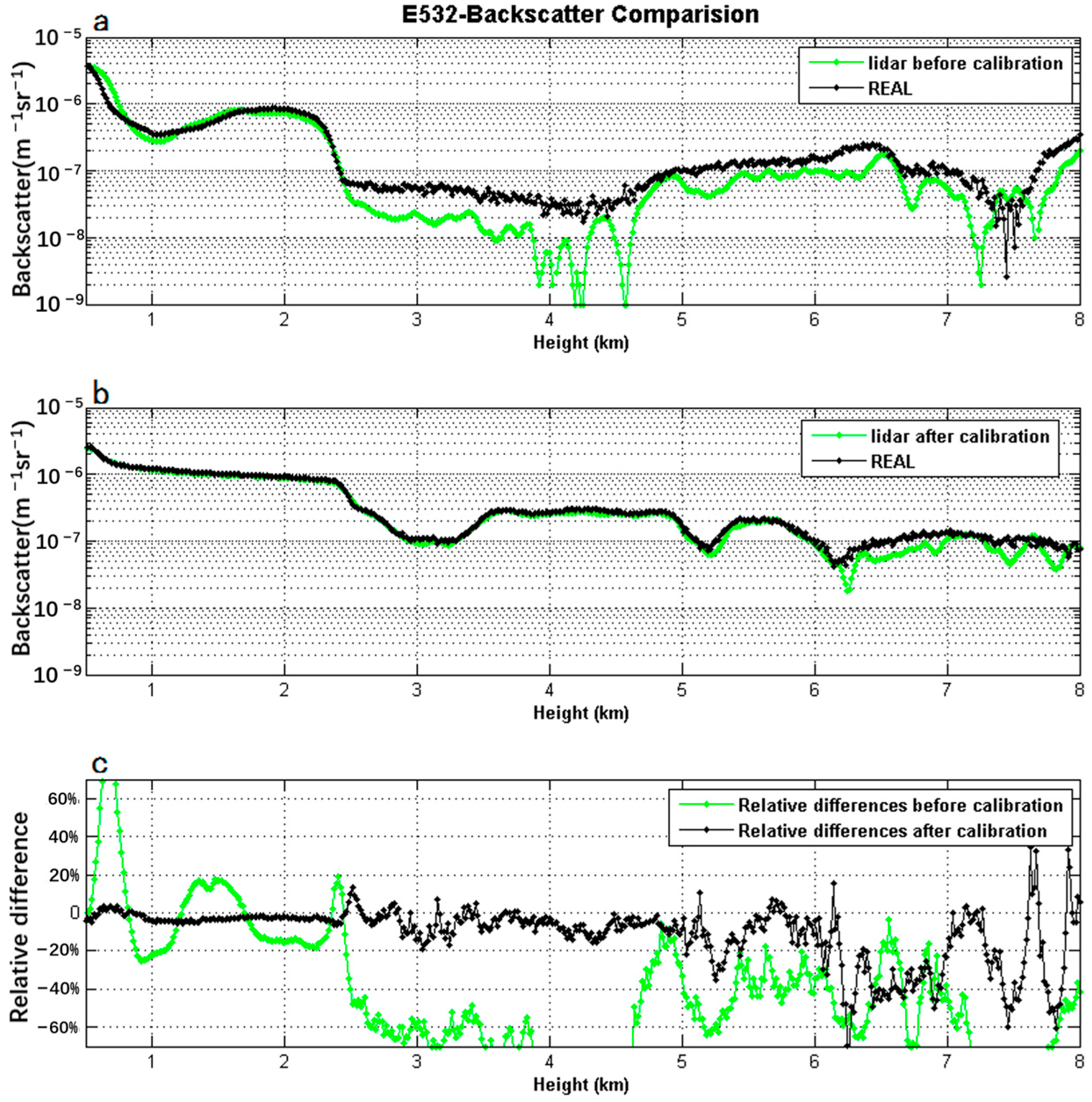
5. Comparative Analysis of 532 nm Depolarization Ratio and Backscattering Coefficient Products
6. Application Research of REAL
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Bösenberg, J.; Linné, H.; Matthias, V.; Böckmann, C.; Mironova, I.; Schneidenbach; Kirsche, A.; Mekler, A.; Wiegner, M.; Freudenthaler, V.; et al. EARLINET: A European Aerosol Research Lidar Network. In Laser Remote Sensing of the Atmosphere, Proceedings of the 20th International Laser Radar Conference, Vichy, France, 10–14 July 2000; Dabas, A., Loth, C., Pelon, J., Eds.; EcolePolytechnique: Palaiseau, France, 2001; pp. 155–158. [Google Scholar]
- Matthais, V.; Freudenthaler, V.; Amodeo, A.; Balin, I.; Balis, D.; Bösenberg, J.; Chaikovsky, A.; Chourdakis, G.; Comeron, A.; Delaval, A.; et al. Aerosol lidar intercomparison in the framework of the EARLINET project. 1. Instruments. Appl. Opt. 2004, 43, 961–976. [Google Scholar] [CrossRef] [PubMed]
- Böckmann, C.; Wandinger, U.; Ansmann, A.; Bösenberg, J.; Amiridis, V.; Boselli, A.; Delaval, A.; De Tomasi, F.; Frioud, M.; Grigorov, I.V.; et al. Aerosol lidar intercomparison in the framework of the EARLINET project. 2. Aerosol backscatter algorithms. Appl. Opt. 2004, 43, 977–989. [Google Scholar] [CrossRef]
- Wandinger, U.; Freudenthaler, V.; Baars, H.; Amodeo, A.; Engelmann, R.; Mattis, I.; Groß, S.; Pappalardo, G.; Giunta, A.; D’Amico, G.; et al. EARLINET instrument intercomparison campaigns: Overview on strategy and results. Atmos. Meas. Tech. 2016, 9, 1001–1023. [Google Scholar] [CrossRef]
- D’Amico, G.; Amodeo, A.; Baars, H.; Binietoglou, I.; Freudenthaler, V.; Mattis, I.; Wandinger, U.; Pappalardo, G. EARLINET Single Calculus Chain—Overview on methodology and strategy. Atmos. Meas. Tech. 2015, 8, 4891–4916. [Google Scholar] [CrossRef]
- Pappalardo, G.; Amodeo, A.; Apituley, A.; Comeron, A.; Freudenthaler, V.; Linné, H.; Ansmann, A.; Bösenberg, J.; D’Amico, G.; Mattis, I.; et al. EARLINET: Towards an advanced sustainable European aerosol lidar network. Atmos. Meas. Tech. 2014, 7, 2389–2409. [Google Scholar] [CrossRef]
- Papagiannopoulos, N.; Mona, L.; Alados-Arboledas, L.; Amiridis, V.; Baars, H.; Binietoglou, I.; Bortoli, D.; D’Amico, G.; Giunta, A.; Guerrero-Rascado, J.L.; et al. CALIPSO climatological products: Evaluation and suggestions from EARLINET. Atmos. Chem. Phys. 2016, 16, 2341–2357. [Google Scholar] [CrossRef]
- Donovan, D.P.; Apituley, A. Practical depolarization-ratio-based inversion procedure: Lidar measurements of the Eyjafjallajökull ash cloud over the Netherlands. Appl. Opt. 2013, 52, 2394–2415. [Google Scholar] [CrossRef]
- Madonna, F.; Amodeo, A.; Boselli, A.; Cornacchia, C.; Cuomo, V.; D’Amico, G.; Giunta, A.; Mona, L.; Pappalardo, G. CIAO: The CNR-IMAA Advanced Observatory for Atmospheric Research. Atmos. Meas. Tech. 2011, 4, 1191–1208. [Google Scholar] [CrossRef]
- Zhou, B.; Zhang, L.; Jiang, D.; Cao, X.; Sui, B. Analysis of aerosol optical depth over Lanzhou based on lidar measurement. Arid. Meteorol. 2013, 31, 666–671. [Google Scholar]
- Chen, B.; Zhang, Y.; Chen, S.; Chen, H.; Guo, P. Fitting aerosol optical depth and PM2.5 in atmospheric boundary layer by using rotational Roman-mielidar. Trans. Beijing Inst. Technol. 2016, 36, 857–861. [Google Scholar]
- Chen, Y.; Li, F.; Shao, N.; Wang, X.; Wang, Y.; Hu, X.; Wang, X. Aerosol Lidar Intercomparison in the Framework of the MEMO Project. 1. Lidar Self Calibration and 1st Comparison Observation Calibration Based on Statistical Analysis Method. In Proceedings of the 2019 International Conference on Meteorology Observations (ICMO), Chengdu, China, 28–31 December 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Lv, L.; Liu, W.; Zhang, T.; Lu, Y.; Dong, Y.; Chen, Z.; Fan, G.; Qi, S. A new micro-pulse lidar for atmospheric horizontal visibility measurement. Chin. J. Lasers. 2014, 41, 0908005. [Google Scholar]
- Guo, W.; Bu, L.; Jia, X.; Liu, D.; Lei, Y.; Chen, D.; Wang, B. Analyses on sand-dust aerosol properties with ceilometer in Beijing. Meteorol. Mon. 2016, 42, 1540–1546. [Google Scholar]
- Zhang, Z.; Su, L.; Chen, L. Retrieval and analysis of aerosol lidar ratio at several typical regions in China. Chin. J. Lasers 2013, 40, 513002. [Google Scholar] [CrossRef]
- Liu, W.; Lun, W.; Kuang, J.; Liu, J.; Xie, P. PBL aerosol monitoring by lidar over GuangZhou in winter. Guangzhou Environ. Sci. 2011, 26, 7–10. [Google Scholar]
- Zhang, Y.; Wang, L.; Wang, C.; Sun, Y.; Chen, S.; Guo, P.; Tan, W.; Jiang, Y.; Chen, H. Analysis and Research on Influencing Factors of Non-Coaxial Lidar Overlap Factor Based on Ray Tracing. Trans. Beijing Inst. Technol. 2023, 43, 213–220. [Google Scholar] [CrossRef]
- Wandinger, U.; Ansmann, A. Experimental determination of the lidar overlap profile with Raman lidar. Appl. Opt. 2002, 41, 511–514. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y. Applied Optics; Publishing House of Electronics Industry: Beijing, China, 2011; pp. 29–71. (In Chinese) [Google Scholar]
- Bu, Z.; Wang, X.; Wang, Y.; Liu, J.; Wang, X.; Li, F.; Shao, N.; Zhou, Z.; Hu, X.; Chen, Y.; et al. Comparison and Analysis of Aerosol Lidar Network. Mega City of Beijing Using Real Lidar. In Proceedings of the International Conference on Meteorology Observations (ICMO), Chengdu, China, 28–31 December 2019; Volume 2019. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Specification |
|---|---|
| Laser system | |
| Wavelength | 532 nm |
| Repetition frequency | 1000 Hz |
| Average power | ≥2 W |
| Cooling method | Air-cooled |
| Receiving system | |
| Telescope diameter | 250 mm |
| Photoelectric converter | PMT |
| Interference filter | ≤1 nm |
| Receiving channel | 532 nm P channel high signal 532 nm P channel low signal 532 nm S channel high signal 532 nm S channel low signal 607 nm channel high signal 607 nm channel low signal |
| Data acquisition boards | Photon counter |
| Channel | Relative Error | Relative Standard Deviation | ||
|---|---|---|---|---|
| 5–7 km | 7–10 km | 5–7 km | 5–7 km | |
| 532 nm P | 0.63% | 3.6% | 532 nm P | 0.63% |
| 532 nm S | −0.07% | −8.7% | 532 nm S | −0.07% |
| 607 nm | −1.7% | 9.5% | 607 nm | −1.7% |
| Channel | High Signal Channel Dynamic Range | The Change in Dynamic Range of the Signal after Fusing |
|---|---|---|
| 532 nm P | 3.3 × 109 | ≥200 times |
| 532 nm S | 2.2 × 108 | ≥10 times |
| 607 nm | 8.9 × 107 | ≥20 times |
| Channel with Resolution | Results | |||||
|---|---|---|---|---|---|---|
| 0.5–2 km | 2–4 km | 4–5 km | ||||
| Relative Mean Deviation | Relative Standard Deviation | Relative Mean Deviation | Relative Standard Deviation | Relative Mean Deviation | Relative Standard Deviation | |
| 532 nm P (15 m, nighttime) | −2.1% | 3.2% | 0.2% | 3.2% | −0.4% | 4.7% |
| 532 nm P (60 m, daytime) | −0.0% | 2.0% | −2.3% | 7.8% | −1.5% | 13.3% |
| 607 nm (15 m) | −2.1% | 2.5% | 1.1% | 4.3% | 0.5% | 7.6% |
| Depolarization | Backscatter Coefficient | |||||||
|---|---|---|---|---|---|---|---|---|
| Mean Deviation (%) | Relative Deviation (%) | Standard Deviation (%) | Relative Standard Deviation (%) | Mean Deviation (sr−1m−1) | Relative Deviation (%) | Standard Deviation (sr−1m−1) | Relative Standard Deviation (%) | |
| 0.3–1 km | −0.017 | −0.189 | 0.059 | 0.656 | 1.1 × 10−8 | 1.556 | 3.6 × 10−8 | 5.143 |
| 1–2 km | −0.049% | \ | 0.60% | \ | 2.7 × 10−9 | \ | 1.3 × 10−8 | \ |
| 2–3 km | 0.20% | \ | 0.30% | \ | −1.1 × 10−8 | \ | 2.4 × 10−8 | \ |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Y.; Bu, Z.; Wang, X.; Dai, Y.; Li, Z.; Lu, T.; Liu, Y.; Wang, X. Development and Calibration of 532 nm Standard Aerosol Lidar with Low Blind Area. Remote Sens. 2024, 16, 570. https://doi.org/10.3390/rs16030570
Chen Y, Bu Z, Wang X, Dai Y, Li Z, Lu T, Liu Y, Wang X. Development and Calibration of 532 nm Standard Aerosol Lidar with Low Blind Area. Remote Sensing. 2024; 16(3):570. https://doi.org/10.3390/rs16030570
Chicago/Turabian StyleChen, Yubao, Zhichao Bu, Xiaopeng Wang, Yaru Dai, Zhigang Li, Tong Lu, Yuan Liu, and Xuan Wang. 2024. "Development and Calibration of 532 nm Standard Aerosol Lidar with Low Blind Area" Remote Sensing 16, no. 3: 570. https://doi.org/10.3390/rs16030570
APA StyleChen, Y., Bu, Z., Wang, X., Dai, Y., Li, Z., Lu, T., Liu, Y., & Wang, X. (2024). Development and Calibration of 532 nm Standard Aerosol Lidar with Low Blind Area. Remote Sensing, 16(3), 570. https://doi.org/10.3390/rs16030570