
A Systematic Review of Ship Wake Detection Methods in Satellite Imagery


Abstract

1. Introduction
- Section 2 provides an overview of the materials and methodology used while conducting the research and data gathering required for this review;
- Section 3 provides the results of the review. In particular, it first covers an overview of the characteristics of ship wakes, then moves onto traditional and state-of-the-art DL-based methods of ship wake detection;
- Section 4 contains a more high-level discussion of the field as a whole, as well as the challenges posed by ship wake detection, and the strengths and weaknesses of the state-of-the-art approaches. A meta-analysis is also provided in this section.
- Section 5 contains the conclusions of the review.
2. Materials and Methods
2.1. Literature Search Strategy
2.2. Inclusion and Exclusion Criteria
- Studies that propose or evaluate methods for ship wake detection using remote sensing imagery, both SAR and optical.
- Research involving traditional and learning-based image processing techniques.
- Articles published in peer-reviewed journals or reputable conference proceedings.
- Publications in English.
- Studies focusing solely on ship detection without considering wake detection.
- Papers dealing with wake detection in non-maritime contexts (e.g., aircraft wakes).
- Articles not available in full text.
- Non-peer-reviewed literature such as theses, dissertations, and white papers.
- Duplicate publications or extended versions of previously published works without significant new contributions.
2.3. Data Extraction and Synthesis
2.4. Quality Assessment
- Clarity and completeness of the methodological description, including data preprocessing steps, algorithm implementation details, and parameter settings.
- Adequacy of the experimental design, including the use of appropriate datasets, validation techniques (e.g., cross-validation), and statistical significance testing.
- Availability of datasets, code repositories, or detailed explanations that enable other researchers to replicate the study.
- The extent to which the study introduces novel approaches or significantly improves upon existing methods.
- Acknowledgment and discussion of any limitations, potential biases, or assumptions made in the study.
2.5. Limitations
- Only articles published in English were included, which may have excluded relevant studies in other languages.
- Despite using multiple databases, some relevant studies may have been missed due to the limitations of the search algorithms or restricted access.
- Given the fast-paced developments in DL and remote sensing technologies, some recent advancements may not be fully captured if they were published after our search had been completed.
- There is a possibility of publication bias, as studies reporting significant or positive results are more likely to be published.
- It would have been ideal to be able to reproduce and test the described methods on publicly available data. This, however, was not done for this review due to the inherent cost of such a thorough analysis.
3. Results
3.1. Overview of Ship Wake Characteristics
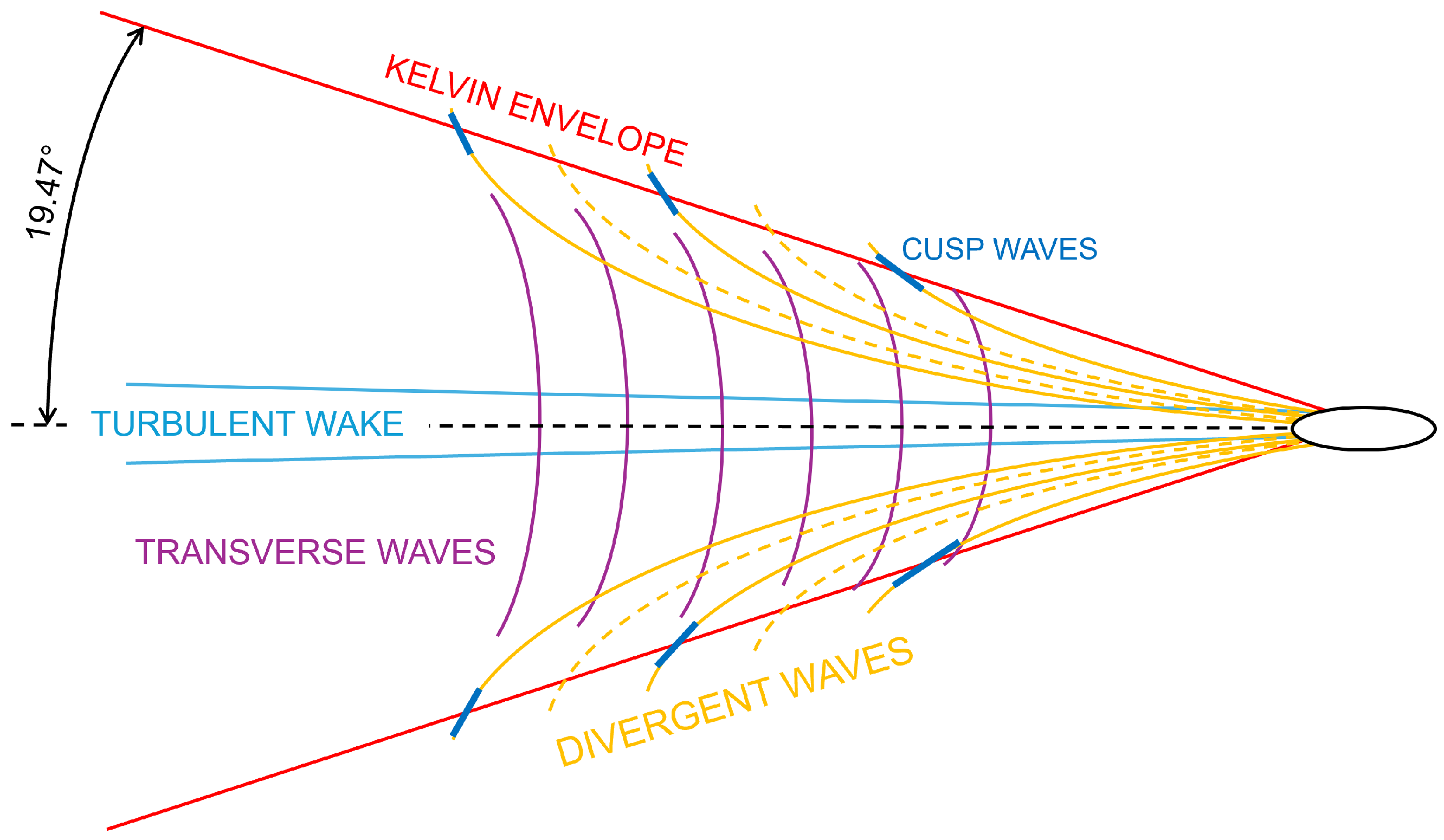
- Turbulent wakes, which stretch directly behind the vessel. With favorable conditions, a turbulent wake can be observed for several kilometers behind the ship itself.
- Kelvin wakes, formed by transverse and divergent waves. Divergent waves, as they propagate outwards from the track of the vessel, interact with transverse waves and generate a V-shaped pattern of cusp waves. These wave groups are strongly influenced by the depth of the seabed and the Froude number of the vessel, as shown in Equation (1):where u is the local flow velocity (in m/s), g is the local gravity field (in m/s2), and L is a characteristic length (in m) usually selected as the ship’s length along the center-line [14].
- Narrow-V wakes, visible through Bragg scattering from short centimeter-scale waves along the vessel.
- Internal wave wakes, generated under certain conditions of shallow stratification.
3.2. Overview of Traditional Methods of Wake Detection
3.2.1. Methods Based on the Extraction of Linear Features
3.2.2. Methods Based on Polarimetric Enhancement
3.2.3. Other Methods
3.3. Introduction to DL-Based Methods for Wake Detection
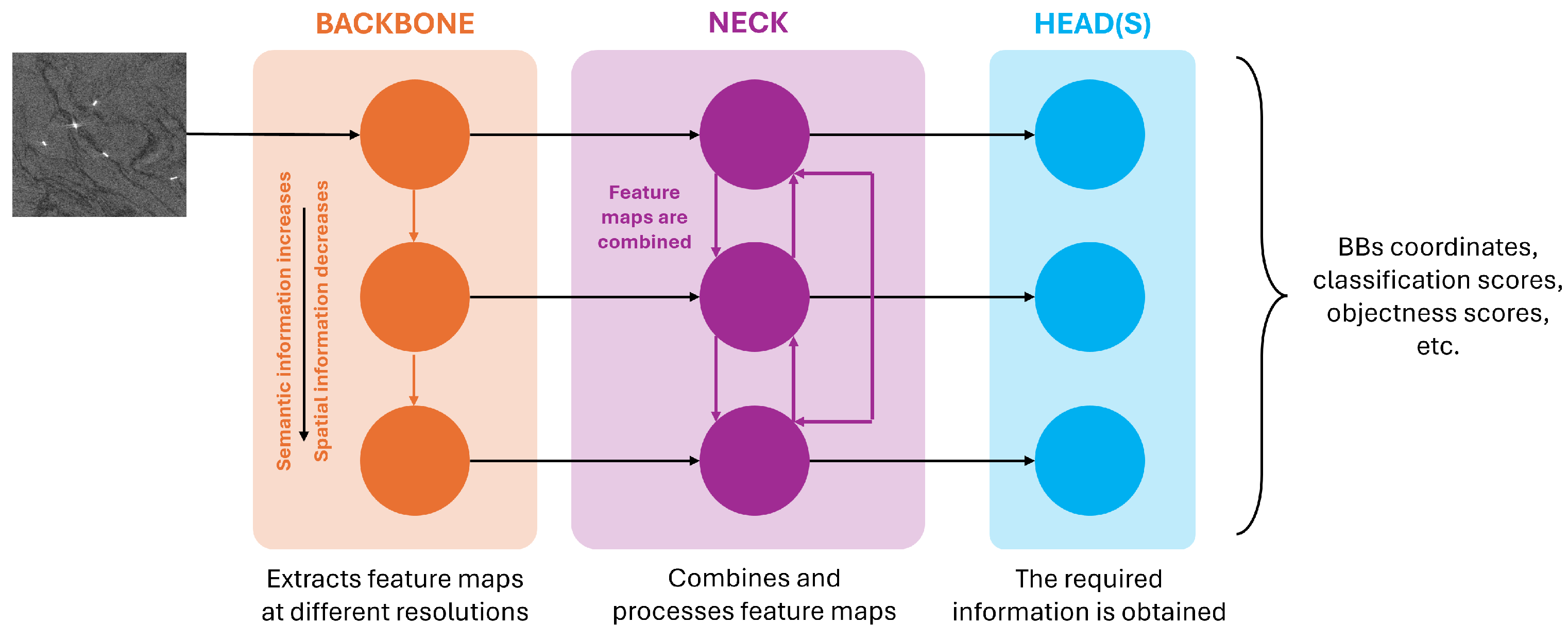
3.3.1. Backbone, Neck, and Heads
3.3.2. Single-Stage and Two-Stage Detectors
- Region proposal is performed by region proposal networks (RPNs), where the image is scanned for a set number of regions in the image that most likely contain objects of interest. In general, the output on an RPN will be a set number of BB proposals and scores representing the probability of the presence of objects at each location.
- Classification, where the content in each BB is classified as one of the object classes of interest or discarded as background. During this stage, BBs are also adjusted through regression to better fit the detected objects.
3.3.3. Anchors and Key-Points
3.3.4. Attention Modules
- Pang et al. [85] increased classification accuracy by better utilizing small object contextual semantics through the usage of a global attention module.
- A spatial and scale attention module was developed by Zhang et al. [86] to allow varying kinds of objects with varying scale attributes to have varying intensity responses at each layer of the FPN.
- Yang et al. [87] used a supervised semantic segmentation method to change the weights of the features of objects of different classes into different channels and, respectively, enhanced and weakened the object and background features in the spatial domain.
3.4. DL-Based Applications for Optical Imagery
- A backbone CNN for feature extraction.
- An FPN with a MSAM that enhances the contextual spatial relevance of feature maps at different scales.
- Classic heads for oriented bounding box (OBB) classification and regression
- An additional head for landmark regression.
3.5. DL-Based Applications for SAR Imagery
- The sea surface was simulated utilizing the Elfouhaily wave spectrum and Mitsuyasu directional function to simulate the sea surface’s randomness and anisotropic characteristics.
- A Kelvin wake mathematical model was used to simulate the wake’s wave height, considering ship speed and direction.
- An SAR image simulation was obtained combining the facet scattering distribution and the SAR imaging mechanism to produce SAR images of the composite sea surface and wake scenes under various conditions.
3.6. Final Overview
4. Discussion
- The quality of wake imaging is strongly dependent on local and, often, global meteo-marine conditions. Even with SAR, which is heavily researched due to its all-weather all-time capabilities, the visualization of wake structures is influenced by wind, sea, and local atmospheric conditions;
- The mechanism behind wake generation is not consistent at a high-level analysis, and real images often feature different combinations of wake structures, if any at all;
- Wake detection near coasts and low depth areas is, in general, particularly problematic and requires different considerations. Very few works have focused on wake detection in these conditions;
- Ship wake detection is limited to moving ships.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- IMO. AIS Transponders—Regulations for Carriage of AIS; IMO: London, UK, 2024. [Google Scholar]
- Pichel, G.W.; Clemente-Colón, P.; Wackerman, C.C.; Friedman, K.S. Chapter 12: Ship and Wake Detection. In Synthetic Aperture Radar Marine User’s Manual; National Environmental Satellite: Silver Spring, MD, USA, 2004. [Google Scholar]
- Graziano, M.D.; D’Errico, M.; Rufino, G. Ship heading and velocity analysis by wake detection in SAR images. Acta Astronaut. 2016, 128, 72–82. [Google Scholar] [CrossRef]
- Graziano, M.; Rufino, G.; D’Errico, M. Wake-based ship route estimation in high-resolution SAR images. In SAR Image Analysis, Modeling, and Techniques XIV; SPIE: Bellingham, WA, USA, 2014; Volume 9243. [Google Scholar] [CrossRef]
- Kang, K.m.; Kim, D.j. Ship Velocity Estimation From Ship Wakes Detected Using Convolutional Neural Networks. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 4379–4388. [Google Scholar] [CrossRef]
- Liu, Y.; Zhao, J.; Qin, Y. A novel technique for ship wake detection from optical images. Remote Sens. Environ. 2021, 258, 112375. [Google Scholar] [CrossRef]
- Arnold, A.; Khenchaf, A.; Martin, A. An evaluation of current ship wake detection algorithms in SAR images. In Caractérisation du Milieu Marin, Brest, France; Citeseer: Princeton, NJ, USA, 2006. [Google Scholar]
- Ding, K.; Yang, J.; Lin, H.; Wang, Z.; Wang, D.; Wang, X.; Ni, K.; Zhou, Q. Towards real-time detection of ships and wakes with lightweight deep learning model in Gaofen-3 SAR images. Remote Sens. Environ. 2023, 284, 113345. [Google Scholar] [CrossRef]
- O’Shea, K.; Nash, R. An Introduction to Convolutional Neural Networks. arXiv 2015, arXiv:1511.08458. [Google Scholar]
- Xue, F.; Jin, W.; Qiu, S.; Yang, J. Rethinking Automatic Ship Wake Detection: State-of-the-Art CNN-Based Wake Detection via Optical Images. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–22. [Google Scholar] [CrossRef]
- Liu, Y.; Zhao, J. Kelvin wake detection from large-scale optical imagery using simulated data trained deep neural network. Ocean Eng. 2024, 297, 117075. [Google Scholar] [CrossRef]
- Li, L.; Wang, S.; Wang, H. A Review on The Vessel of Hull and Wake Detection for Infrared Remote Sensing Images. In Proceedings of the 2022 IEEE 24th International Workshop on Multimedia Signal Processing (MMSP), Shanghai, China, 26–28 September 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Liu, Y.; Deng, R.; Zhao, J. Simulation of Kelvin wakes in optical images of rough sea surface. Appl. Ocean Res. 2019, 89, 36–43. [Google Scholar] [CrossRef]
- White, F.M. Fluid Mechanics, 4th ed.; WCB/McGraw-Hill: New York, NY, USA, 1999; p. 465. [Google Scholar]
- Panico, A.; Graziano, M.D.; Renga, A. SAR-Based Vessel Velocity Estimation From Partially Imaged Kelvin Pattern. IEEE Geosci. Remote Sens. Lett. 2017, 14, 2067–2071. [Google Scholar] [CrossRef]
- Liu, Y.; Deng, R. Ship Wakes in Optical Images. J. Atmos. Ocean. Technol. 2018, 35, 1633–1648. [Google Scholar] [CrossRef]
- Tings, B.; Pleskachevsky, A.; Wiehle, S. Comparison of detectability of ship wake components between C-Band and X-Band synthetic aperture radar sensors operating under different slant ranges. ISPRS J. Photogramm. Remote Sens. 2023, 196, 306–324. [Google Scholar] [CrossRef]
- Tings, B.; Pleskachevsky, A.; Velotto, D.; Jacobsen, S. Extension of Ship Wake Detectability Model for Non-Linear Influences of Parameters Using Satellite Based X-Band Synthetic Aperture Radar. Remote Sens. 2019, 11, 563. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, R.; Deng, R.; Zhao, J. Ship detection and classification based on cascaded detection of hull and wake from optical satellite remote sensing imagery. GIScience Remote Sens. 2023, 60, 2196159. [Google Scholar] [CrossRef]
- Yang, L.; Chen, X.; Chang, S.; Xu, E.; Wang, X.; Wang, Y.; Zhao, X.; Du, Y.; Kou, W.; Fan, C. Infrared imaging simulation and detection of ship wake. In Proceedings of the AOPC 2015: Optical and Optoelectronic Sensing and Imaging Technology, Beijing, China, 5–7 May 2015; Gong, H., Wu, N., Ni, Y., Chen, W., Lu, J., Eds.; International Society for Optics and Photonics, SPIE: Bellingham, WA, USA, 2015; Volume 9674, p. 96741F. [Google Scholar] [CrossRef]
- Zhang, S.; Yang, L.; Shi, H. Infrared characterization and detection of ship wake based on ray tracing method. Hongwai Yu Jiguang Gongcheng/Infrared Laser Eng. 2015, 44, 1450–1455. [Google Scholar]
- Iersel, M.; Devecchi, B. Modeling the infrared and radar signature of the wake of a vessel. In Proceedings of the SPIE Remote Sensing and Security + Defence, Toulouse, France, 21–24 September 2015; Volume 9653-11. [Google Scholar] [CrossRef]
- Sun, Y.X.; Liu, P.; Jin, Y.Q. Ship Wake Components: Isolation, Reconstruction, and Characteristics Analysis in Spectral, Spatial, and TerraSAR-X Image Domains. IEEE Trans. Geosci. Remote Sens. 2018, 56, 4209–4224. [Google Scholar] [CrossRef]
- Wang, J.; Guo, L.; Wei, Y.; Chai, S. Study on Ship Kelvin Wake Detection in Numerically Simulated SAR Images. Remote Sens. 2023, 15, 1089. [Google Scholar] [CrossRef]
- D’Errico, M.; Graziano, M.D. Observation Frequency Analysis for Multiconstellation RadarSystems over the Mediterranean Sea. Int. J. Aerosp. Eng. 2023, 2023, 3209006. [Google Scholar] [CrossRef]
- Radon, J. On the determination of functions from their integral values along certain manifolds. IEEE Trans. Med. Imaging 1986, 5, 170–176. [Google Scholar] [CrossRef]
- Hough, P.V.C. A Method and Means for Recognition Complex Patterns. US3069654A, 18 December 1962. [Google Scholar]
- El Mejdani, S.; Egli, R.; Dubeau, F. Old and new straight-line detectors: Description and comparison. Pattern Recognit. 2008, 41, 1845–1866. [Google Scholar] [CrossRef]
- Eldhuset, K. An automatic ship and ship wake detection system for spaceborne SAR images in coastal regions. IEEE Trans. Geosci. Remote Sens. 1996, 34, 1010–1019. [Google Scholar] [CrossRef]
- Graziano, M. Preliminary Results of Ship Detection Technique by Wake Pattern Recognition in SAR Images. Remote Sens. 2020, 12, 2869. [Google Scholar] [CrossRef]
- Rey, M.; Tunaley, J.; Folinsbee, J.; Jahans, P.; Dixon, J.; Vant, M. Application of Radon Transform Techniques to Wake Detection in Seasat-A SAR Images. IEEE Trans. Geosci. Remote Sens. 1990, 28, 553–560. [Google Scholar] [CrossRef]
- Copeland, A.; Ravichandran, G.; Trivedi, M. Localized Radon transform-based detection of ship wakes in SAR images. IEEE Trans. Geosci. Remote Sens. 1995, 33, 35–45. [Google Scholar] [CrossRef]
- Scherbakov, A.; Hanssen, R.; Vosselman, G.; Feron, R. Ship wake detection using Radon transforms of filtered SAR imagery. In Proceedings of the SPIE—The International Society for Optical Engineering, Taormina, Italy, 23–27 September 1996; Microwave Sensing and Synthetic Aperture Radar. Volume 2958, pp. 96–106. [Google Scholar] [CrossRef]
- Biondi, F. Low-Rank Plus Sparse Decomposition and Localized Radon Transform for Ship-Wake Detection in Synthetic Aperture Radar Images. IEEE Geosci. Remote Sens. Lett. 2018, 15, 117–121. [Google Scholar] [CrossRef]
- Zilman, G.; Zapolski, A.; Marom, M. The speed and beam of a ship from its wake’s SAR images. IEEE Trans. Geosci. Remote Sens. 2004, 42, 2335–2343. [Google Scholar] [CrossRef]
- Graziano, M.D.; D’Errico, M.; Rufino, G. Wake Component Detection in X-Band SAR Images for Ship Heading and Velocity Estimation. Remote Sens. 2016, 8, 498. [Google Scholar] [CrossRef]
- Warrick, A.; Delaney, P. Detection of linear features using a localized Radon transform with a wavelet filter. In Proceedings of the 1997 IEEE International Conference on Acoustics, Speech, and Signal Processing, Munich, Germany, 21–24 April 1997; Volume 4, pp. 2769–2772. [Google Scholar] [CrossRef]
- Courmontagne, P. An improvement of ship wake detection based on the radon transform. Signal Process. 2005, 85, 1634–1654. [Google Scholar] [CrossRef]
- Graziano, M.; Grasso, M.; D’Errico, M. Performance Analysis of Ship Wake Detection on Sentinel-1 SAR Images. Remote Sens. 2017, 9, 1107. [Google Scholar] [CrossRef]
- Biondi, F. A Polarimetric Extension of Low-Rank Plus Sparse Decomposition and Radon Transform for Ship Wake Detection in Synthetic Aperture Radar Images. IEEE Geosci. Remote Sens. Lett. 2019, 16, 75–79. [Google Scholar] [CrossRef]
- Aggarwal, N.; Karl, W. Line detection in images through regularized hough transform. IEEE Trans. Image Process. 2006, 15, 582–591. [Google Scholar] [CrossRef]
- Jiaqiu, A.; Xiangyang, Q.; Weidong, Y.; Yunkai, D.; Fan, L.; Li, S.; Yafei, J. A Novel Ship Wake CFAR Detection Algorithm Based on SCR Enhancement and Normalized Hough Transform. IEEE Geosci. Remote Sens. Lett. 2011, 8, 681–685. [Google Scholar] [CrossRef]
- Graziano, M.D.; Renga, A. Towards Automatic Recognition of Wakes Generated by Dark Vessels in Sentinel-1 Images. Remote Sens. 2021, 13, 1955. [Google Scholar] [CrossRef]
- Krishnaveni, M.; Thakur, S.; Subashini, P. An Optimal Method For Wake Detection In SAR Images Using Radon Transformation Combined with Wavelet Filters. Int. J. Comput. Sci. Inf. Secur. 2009, 6. [Google Scholar] [CrossRef]
- Karakuş, O.; Rizaev, I.; Achim, A. Ship Wake Detection in SAR Images via Sparse Regularization. IEEE Trans. Geosci. Remote Sens. 2020, 58, 1665–1677. [Google Scholar] [CrossRef]
- Nan, J.; Wang, C.; Zhang, B.; Wu, F.; Zhang, H.; Tang, Y. Ship wake CFAR detection algorithm in SAR images based on length normalized scan. In Proceedings of the 2013 IEEE International Geoscience and Remote Sensing Symposium, IGARSS 2013, Melbourne, Australia, 21–26 July 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 3562–3565. [Google Scholar] [CrossRef]
- Tings, B.; Velotto, D. Ship Wake Detectability and Classification on TerraSAR-X high resolution data. In Proceedings of the EUSAR 2018; 12th European Conference on Synthetic Aperture Radar, Aachen, Germany, 4–7 June 2018; pp. 1–4. [Google Scholar]
- Wei, Y.; Wu, Z.; Li, H.; Wu, J.; Qu, T. Application of periodic structure scattering in Kelvin ship wakes detection. Sustain. Cities Soc. 2019, 47, 101463. [Google Scholar] [CrossRef]
- Jiang, Y.; Yang, Z.; Li, K.; Liu, T. Pre-Processing of Simulated Synthetic Aperture Radar Image Scenes Using Polarimetric Enhancement for Improved Ship Wake Detection. Remote Sens. 2024, 16, 658. [Google Scholar] [CrossRef]
- Liu, H.; Zhu, M. A novel ship wake detection method of SAR images based on frequency domain. J. Electron. 2003, 20, 313–320. [Google Scholar] [CrossRef]
- Chen, P.; Li, X.; Zheng, G. Rapid detection to long ship wake in synthetic aperture radar satellite imagery. J. Oceanol. Limnol. 2019, 37, 1523–1532. [Google Scholar] [CrossRef]
- Yang, T.; Karakuş, O.; Achim, A. Detection Of Ship Wakes In Sar Imagery Using Cauchy Regularisation. In Proceedings of the 2020 IEEE International Conference on Image Processing (ICIP), Virtual, 25–28 October 2020; pp. 3473–3477. [Google Scholar] [CrossRef]
- Guan, Y.; Xu, H.; Li, C. A Method of Ship Wake Detection in SAR Images Based on Reconstruction Features and Anomaly Detector. In Proceedings of the IGARSS 2023—2023 IEEE International Geoscience and Remote Sensing Symposium, Pasadena, CA, USA, 16–21 July 2023; pp. 6398–6401. [Google Scholar] [CrossRef]
- Yang, G.; Yu, J.; Xiao, C.; Sun, W. Ship wake detection for SAR images with complex backgrounds based on morphological dictionary learning. In Proceedings of the 2016 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Shanghai, China, 20–25 March 2016; pp. 1896–1900. [Google Scholar] [CrossRef]
- Zhang, L. Application Of Electrical Ship Wakes Detection Trace of Synthetic Aperture Radar (SAR) Image in Coast Guard. J. Phys. Conf. Ser. 2021, 2033, 012101. [Google Scholar] [CrossRef]
- Ding, K.; Yang, J.; Wang, Z.; Ni, K.; Wang, X.; Zhou, Q. Specific Windows Search for Multi-Ship and Multi-Scale Wake Detection in SAR Images. Remote Sens. 2022, 14, 25. [Google Scholar] [CrossRef]
- Li, Z.; Wang, Y.; Zhang, N.; Zhang, Y.; Zhao, Z.; Xu, D.; Ben, G.; Gao, Y. Deep Learning-Based Object Detection Techniques for Remote Sensing Images: A Survey. Remote Sens. 2022, 14, 2385. [Google Scholar] [CrossRef]
- Heaton, J.; Goodfellow, I.; Bengio, Y.; Courville, A. Deep learning. Genet. Program. Evolvable Mach. 2018, 19, 305–307. [Google Scholar] [CrossRef]
- Lin, T.Y.; Maire, M.; Belongie, S.; Bourdev, L.; Girshick, R.; Hays, J.; Perona, P.; Ramanan, D.; Zitnick, C.L.; Dollár, P. Microsoft COCO: Common Objects in Context. arXiv 2015, arXiv:1405.0312. [Google Scholar]
- Deng, J.; Dong, W.; Socher, R.; Li, L.J.; Li, K.; Fei-Fei, L. ImageNet: A large-scale hierarchical image database. In Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2009; pp. 248–255. [Google Scholar] [CrossRef]
- Del Prete, R.; Graziano, M.D.; Renga, A. First Results on Wake Detection in SAR Images by Deep Learning. Remote Sens. 2021, 13, 4573. [Google Scholar] [CrossRef]
- Wang, H.; Nie, D.; Zuo, Y.; Tang, L.; Zhang, M. Nonlinear Ship Wake Detection in SAR Images Based on Electromagnetic Scattering Model and YOLOv5. Remote Sens. 2022, 14, 5788. [Google Scholar] [CrossRef]
- Esposito, C.; Prete, R.D.; Graziano, M.D.; Renga, A. First Results of Ship Wake Detection by Deep Learning Techniques in Multispectral Spaceborne Images. In Proceedings of the IGARSS 2022—2022 IEEE International Geoscience and Remote Sensing Symposium, Kuala Lumpur, Malaysia, 17–22 July 2022; pp. 2167–2170. [Google Scholar] [CrossRef]
- Del Prete, R.; Graziano, M.D.; Renga, A. Keypoints Method for Recognition of Ship Wake Components in Sentinel-2 Images by Deep Learning. IEEE Geosci. Remote Sens. Lett. 2023, 20, 1–5. [Google Scholar] [CrossRef]
- Xu, C.; Wang, X. OpenSARWake: A Large-Scale SAR Dataset for Ship Wake Recognition with a Feature Refinement Oriented Detector. IEEE Geosci. Remote Sens. Lett. 2024, 21, 1–5. [Google Scholar] [CrossRef]
- Rizaev, I.G.; Achim, A. SynthWakeSAR: A Synthetic SAR Dataset for Deep Learning Classification of Ships at Sea. Remote Sens. 2022, 14, 3999. [Google Scholar] [CrossRef]
- Kateb, F.A.; Monowar, M.M.; Hamid, M.A.; Ohi, A.Q.; Mridha, M.F. FruitDet: Attentive Feature Aggregation for Real-Time Fruit Detection in Orchards. Agronomy 2021, 11, 2440. [Google Scholar] [CrossRef]
- Dosovitskiy, A.; Beyer, L.; Kolesnikov, A.; Weissenborn, D.; Zhai, X.; Unterthiner, T.; Dehghani, M.; Minderer, M.; Heigold, G.; Gelly, S.; et al. An Image is Worth 16x16 Words: Transformers for Image Recognition at Scale. arXiv 2021, arXiv:2010.11929. [Google Scholar]
- Lin, T.Y.; Dollár, P.; Girshick, R.; He, K.; Hariharan, B.; Belongie, S. Feature Pyramid Networks for Object Detection. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 936–944. [Google Scholar] [CrossRef]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich Feature Hierarchies for Accurate Object Detection and Semantic Segmentation. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 580–587. [Google Scholar] [CrossRef]
- Girshick, R. Fast R-CNN. arXiv 2015, arXiv:1504.08083. [Google Scholar]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. SSD: Single Shot MultiBox Detector. In Proceedings of the Computer Vision—ECCV 2016, Amsterdam, The Netherlands, 11–14 October 2016; Leibe, B., Matas, J., Sebe, N., Welling, M., Eds.; pp. 21–37. [Google Scholar]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You Only Look Once: Unified, Real-Time Object Detection. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 779–788. [Google Scholar] [CrossRef]
- Redmon, J.; Farhadi, A. YOLO9000: Better, Faster, Stronger. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 6517–6525. [Google Scholar] [CrossRef]
- Redmon, J.; Farhadi, A. YOLOv3: An Incremental Improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Bochkovskiy, A.; Wang, C.Y.; Liao, H.Y.M. YOLOv4: Optimal Speed and Accuracy of Object Detection. arXiv 2020, arXiv:2004.10934. [Google Scholar]
- Ge, Z.; Liu, S.; Wang, F.; Li, Z.; Sun, J. YOLOX: Exceeding YOLO Series in 2021. arXiv 2021, arXiv:2107.08430. [Google Scholar]
- Li, J.; Chen, J.; Cheng, P.; Yu, Z.; Yu, L.; Chi, C. A Survey on Deep-Learning-Based Real-Time SAR Ship Detection. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2023, 16, 3218–3247. [Google Scholar] [CrossRef]
- Zhao, T.; Wang, Y.; Li, Z.; Gao, Y.; Chen, C.; Feng, H.; Zhao, Z. Ship Detection with Deep Learning in Optical Remote-Sensing Images: A Survey of Challenges and Advances. Remote Sens. 2024, 16, 1145. [Google Scholar] [CrossRef]
- Zhang, S.; Chi, C.; Yao, Y.; Lei, Z.; Li, S.Z. Bridging the Gap Between Anchor-based and Anchor-free Detection via Adaptive Training Sample Selection. arXiv 2020, arXiv:1912.02424. [Google Scholar]
- Wang, C.; Luo, Z.; Lian, S.; Li, S. Anchor Free Network for Multi-Scale Face Detection. In Proceedings of the 2018 24th International Conference on Pattern Recognition (ICPR), Beijing, China, 20–24 August 2018; pp. 1554–1559. [Google Scholar] [CrossRef]
- Law, H.; Deng, J. CornerNet: Detecting Objects as Paired Keypoints. Int. J. Comput. Vis. 2020, 128. [Google Scholar] [CrossRef]
- Zhou, X.; Zhuo, J.; Krähenbühl, P. Bottom-up Object Detection by Grouping Extreme and Center Points. arXiv 2019, arXiv:1901.08043. [Google Scholar]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, L.; Polosukhin, I. Attention Is All You Need. arXiv 2023, arXiv:1706.03762. [Google Scholar]
- Pang, J.; Li, C.; Shi, J.; Xu, Z.; Feng, H. 2-CNN: Fast Tiny Object Detection in Large-Scale Remote Sensing Images. IEEE Trans. Geosci. Remote Sens. 2019, 57, 5512–5524. [Google Scholar] [CrossRef]
- Zhang, G.; Lu, S.; Zhang, W. CAD-Net: A Context-Aware Detection Network for Objects in Remote Sensing Imagery. IEEE Trans. Geosci. Remote Sens. 2019, 57, 10015–10024. [Google Scholar] [CrossRef]
- Yang, X.; Yan, J.; Yang, X.; Tang, J.; Liao, W.; He, T. SCRDet++: Detecting Small, Cluttered and Rotated Objects via Instance-Level Feature Denoising and Rotation Loss Smoothing. IEEE Trans. Pattern Anal. Mach. Intell. 2020, 45, 2384–2399. [Google Scholar] [CrossRef]
- He, K.; Gkioxari, G.; Dollár, P.; Girshick, R. Mask R-CNN. In Proceedings of the 2017 IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 2980–2988. [Google Scholar] [CrossRef]
- Szegedy, C.; Liu, W.; Jia, Y.; Sermanet, P.; Reed, S.; Anguelov, D.; Erhan, D.; Vanhoucke, V.; Rabinovich, A. Going Deeper with Convolutions. arXiv 2014. [Google Scholar] [CrossRef]
- Tan, M.; Le, Q.V. EfficientNet: Rethinking Model Scaling for Convolutional Neural Networks. arXiv 2020, arXiv:1905.11946. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 1137–1149. [Google Scholar] [CrossRef]
- Cai, Z.; Vasconcelos, N. Cascade R-CNN: Delving Into High Quality Object Detection. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 6154–6162. [Google Scholar] [CrossRef]
- Lin, T.Y.; Goyal, P.; Girshick, R.; He, K.; Dollár, P. Focal Loss for Dense Object Detection. arXiv 2018, arXiv:1708.02002. [Google Scholar]
- Hu, J.; Shen, L.; Albanie, S.; Sun, G.; Wu, E. Squeeze-and-Excitation Networks. arXiv 2019, arXiv:1709.01507. [Google Scholar]
- Liu, Z.; Mao, H.; Wu, C.Y.; Feichtenhofer, C.; Darrell, T.; Xie, S. A ConvNet for the 2020s. arXiv 2022. [Google Scholar] [CrossRef]
- Wang, C.; Mouche, A.; Tandeo, P.; Stopa, J.; Longépé, N.; Erhard, G.; Foster, R.; Vandemark, D.; Chapron, B. A labelled ocean SAR imagery dataset of ten geophysical phenomena from Sentinel-1 wave mode. Geosci. Data J. 2019, 6, 105–115. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Dataset | Image Type | Images Characteristics | Annotations | Links (Last Accessed 27 September 2024) |
|---|---|---|---|---|---|
| [10] | Ship Wake Imagery Mass (SWIM) | Optical | 768 × 768 pixels Google Earth optical images (2.5-m to 0.5-m resolution). 11,600 positive examples and 3010 negative examples, up to 15,356 wake instances | Oriented bounding box and landmarks | https://www.kaggle.com/datasets/lilitopia/swimship-wake-imagery-mass |
| [65] | OpenSARWake | SAR | This collection provides 3973 1024 × 1024 pixels SAR images of two polarization modes. 4096 instances. Bands L, C, X, with resolutions going from 1.25 m to 12.5 m | Oriented bounding box | https://github.com/libzzluo/OpenSARWake |
| [66] | SynthWakeSAR | Synthetic SAR | 10 ship models for a total of 46,080 images. 0.96 × 0.96 km scene, 3.3-m azimuth and range resolutions. 227 × 227 × 1 pixels. Noised and despeckled images provided. | Classification annotations | https://data.bris.ac.uk/data/dataset/30kvuvmatwzij2mz1573zqumfx |
| Reference | Type | Method | Advantages | Disadvantages | Imagery Source |
|---|---|---|---|---|---|
| [31] | Traditional, SAR | Radon Transform (RT) with filtering (e.g., Wiener filter) | Effective for detecting linear features; increases SNR; filters reduce false alarms | High false alarm rate without post-processing; requires additional filters | Seasat-A (L-band) |
| [32] | Traditional, SAR/Synthetic | Localized RT using Feature Space Line Detector (FSLD) algorithm. | Robust against noise; better localization of short and curved wakes | Computationally intensive; less accurate for long wakes without full coverage | Seasat-A and simulated imagery |
| [29] | Traditional, SAR | Digital terrain models for masking land; RT for wake detection | Fast system; reduces false alarms; demonstrated on ERS-1 and Seasat data | Higher false wake detection in ERS-1; some ships missed (7.4% Seasat, 8% ERS-1) | Seasat-A, ERS-1 |
| [33] | Traditional, SAR | RT with band-pass filtering and non-linear amplification | Enhances detection of faint wakes; effective preprocessing steps | Dependent on wake appearance and image quality; may not eliminate all false positives | N/A |
| [37] | Traditional, SAR | Localized RT combined with wavelet filter (LRTWF) | Detects linear and chirp-like features simultaneously; robust to Gaussian noise | Increased computational complexity; local | N/A |
| [50] | Traditional, SAR | Frequency-domain linear feature detection (FLD). | Reduces computational complexity by 20–40%; feasible for real-time detection. | Requires pre-processing to reduce false alarms; careful threshold adjustment needed | Real and synthetic SAR data |
| [35] | Traditional, SAR | Fast Discrete Radon Transform (FDRT); speed estimation from wake spectrum. | Efficient speed and beam estimation; works with Kelvin and turbulent wakes. | Limited to straight ship paths; less accurate for maneuvering ships | Airborne SAR (X-band) |
| [38] | Traditional, SAR | RT with stochastic matched filtering. | Reduces speckle noise; enhances wake features. | Higher computational cost due to interpolation at each rotation angle. | SIR-C/X-SAR, ERS SAR |
| [44] | Traditional, SAR/Synthetic | RT combined with wavelet filters for denoising | Improves SNR; enhances wake detection in noisy images | Higher computational complexity; struggles with heavy noise | N/A |
| [42] | Traditional, SAR | CFAR detection using signal-to-clutter ratio (SCR) enhancement and Normalized Hough Transform (NHT). | Enhances wake detection in terms of SCR; improves performance of CFAR | Usual weaknesses of thresholding and line detection | RADARSAT-1, TerraSAR-X |
| [46] | Traditional, SAR | CFAR detection based on length normalized scan | Higher accuracy than Radon/Hough transforms; accurate velocity estimation | Requires ship detection beforehand; computationally complex | COSMO-SkyMed, ERS-2, RADARSAT-1/2 |
| [4] | Traditional, SAR | Classic RT application for heading extraction | Simple to apply | Inherits weaknesses of RT | COSMO-SkyMed and TerraSAR-X |
| [21] | Traditional, Optical (IR)/Synthetic | Infrared imaging model using Cook–Torrance model and ray tracing | Comprehensive environmental modeling | Difficult to model all environmental conditions accurately | Synthetic data |
| [54] | Traditional, SAR | Morphological dictionary learning with component analysis | Outperforms traditional methods; effective in complex backgrounds | Computationally complex; requires quality initial dictionaries | ERS-2 |
| [3] | Traditional, SAR | Wake feature identification using hydrodynamic theory; azimuth shift for heading and velocity | Better than simple thresholding; simple application | Low agreement among methods | COSMO-SkyMed and TerraSAR-X Stripmap |
| [36] | Traditional, SAR | RT-based detection of turbulent and narrow-V wakes; azimuth shift for estimation. | Accurate detection; robust against noise and multiple wakes. | Tested on limited images; ineffective for curvilinear wakes. | TerraSAR-X, COSMO-SkyMed |
| [39] | Traditional, SAR | RT with classification and feature validation on Sentinel-1. | High detection accuracy (78.5%); robust against false confirmations. | Some false confirmations (18.5% on Kelvin arms). | Sentinel-1 |
| [34] | Traditional, SAR | Dual-stage Low-Rank Plus Sparse Decomposition (LRSD) with RT. | Robust wake detection; effective under heavy clutter. | Computationally intensive due to dual-stage processing. | COSMO-SkyMed |
| [40] | Traditional, PolSAR | Polarimetric LRSD and RT for clutter reduction | High precision; effective clutter reduction and classification. | Not tested in adverse weather conditions | UAVSAR airborne SAR |
| [51] | Traditional, SAR | Detection using Doppler shift curve analysis and linear fitting | Fast detection; effective for long wakes | Less effective for short wakes; requires precise parameter tuning | ENVISAT ASAR, GF-3 SAR |
| [48] | Traditional, Synthetic SAR | Periodic structure scattering using Floquet theorem and EBCM. | Useful for synthetic applications; efficient scattering calculation | Limited to Kelvin wakes; excludes turbulent wakes | Synthetic data |
| [52] | Traditional, SAR | Wake detection using Cauchy regularization | Enhanced performance with Moreau Yoshida unadjusted Langevin algorithm (MYULA) | Computationally complex; requires fine-tuning | COSMO-SkyMed |
| [30] | Traditional, SAR | RT for wake detection with two-step validation | Effective for detecting go-fast boats; reduces false alarms | Requires favorable sea and wind conditions | TerraSAR-X Stripmap |
| [45] | Traditional, SAR/Synthetic | Inverse problem approach with sparse regularization and RT | Handles wakes as inverse problem | Lower performance on low-resolution images; computationally demanding | TerraSAR-X, COSMO-SkyMed, Sentinel-1, Advanced Land Observing Satellite 2 (ALOS-2), Synthetic |
| [6] | Traditional, Optical | RT of images with centered hulls; verification of true wakes | The demonstrated principle is interesting for post-processing | Requires hull-centered imagery; inherits RT weaknesses | Gaofen-1, Sentinel-2, Landsat-8 |
| [55] | Traditional, SAR | Detection using two-parameter CFAR and multi-image correlation | Suitable for wide-area monitoring; high accuracy | Difficulties in complex sea backgrounds; sensitive to sea conditions | N/A |
| [43] | Traditional, SAR | RT-based detection for identifying dark vessels | Effective in homogeneous sea clutter; reconstructs wake lines | Struggles with sharp wind transitions or surface films | Sentinel-1 |
| [56] | Traditional, SAR | Multi-ship and multi-scale wake detection using RT enhancement | High accuracy; effective on complex wakes; no large datasets needed | May miss small wakes; challenging in complex backgrounds | Gaofen-3 |
| [53] | Traditional, SAR | Anomaly detection using sea clutter dictionaries | Improves detection under varying sea states; adaptable to complex environments | Requires extensive training data; computationally intensive dictionary learning | HRSID dataset |
| [19] | Traditional, Optical | Cascaded hull and wake detection using Fourier transform; fuzzy classifier | Cascaded approach is effective; of great interest | Higher computational requirements | Gaofen-1 panchromatic and multi-spectral |
| [24] | Traditional, Synthetic SAR | Non-convex regularization with Cauchy-based penalty | High accuracy in simulated conditions; sensitive to ship parameters | Limited to simulated data; unverified in real conditions | Numerically simulated data |
| [49] | Traditional, Synthetic SAR | Pre-processing with polarimetric enhancement | Enhanced detection using PWF and PDOF filters | Complex pre-processing; mitigation of bright points needed | Synthetic data |
| [5] | DL, SAR | Vessel velocity estimation via azimuth offset using CNNs; RT for wake highlighting | Validated with AIS data; effective velocity estimation | Inherits RT weaknesses; issues with dark ships in AIS data | TanDEM-X Single Look Complex (SLC) images |
| [10] | DL, Optical | CNN architecture exploiting X-shaped wake patterns and RT | Combines CNN with traditional knowledge; effective detection. | Inherits weaknesses of traditional CNNs | Google Earth imagery (0.5–2.5 m resolution) |
| [61] | DL, SAR | Wake detection using Cascade Mask R-CNN | Robust detection in Sentinel-1 images; generalizes to X-band data. | High false alarm rate in rough seas; limited dataset size | Sentinel-1, TerraSAR-X, COSMO-SkyMed |
| [63] | DL, Optical (Multi-spectral) | Wake detection using Mask R-CNN | High accuracy in complex scenarios; effective in multiple configurations | Requires large training dataset; sensitive to weather conditions | Sentinel-2 |
| [62] | DL, SAR | Nonlinear wake detection using electromagnetic scattering model and YOLOv5 | High efficiency and accuracy; detects weak wakes in complex seas | Requires high computational power; some limitations in high sea states. | SEASAT, TerraSAR-X, Synthetic SAR data |
| [64] | DL, Optical | Keypoints method using deep learning for wake recognition | High accuracy; fast processing; lightweight model for edge devices | Struggles under poor conditions; limited to optical images | Sentinel-2, Landsat-9 |
| [8] | DL, SAR | Lighter version of YOLOv4 for efficiency; detects ships and wakes | Novel method; more efficient than classic YOLOv4 | Small dataset used in study; may limit generalizability. | Gaofen-3 |
| [11] | DL, Optical/Synthetic | Kelvin wake detection from large-scale optical imagery using simulated data trained deep neural network | High accuracy (Recall 94%, Precision 70.8%), effective use of simulated data to address data scarcity | Moderate precision, requires synthetic data to compensate for limited real wake samples | Gaofen-1 |
| [65] | DL, SAR | Presented OpenSARWake dataset. Tested several architectures on it. Feature Refinement Oriented Detector (SWNet) | Large-scale SAR dataset, multi-band data, diverse wake types | Moderate mAP, challenges with complex sea clutter and small targets in SAR images | Sentinel-1A, TerraSAR-X, ALOS-PALSAR |
| Traditional | Deep Learning | ||
|---|---|---|---|
| SAR | 29 | 5 | |
| Optical | 3 | 4 | |
| TOTAL | 41 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mazzeo, A.; Renga, A.; Graziano, M.D. A Systematic Review of Ship Wake Detection Methods in Satellite Imagery. Remote Sens. 2024, 16, 3775. https://doi.org/10.3390/rs16203775
Mazzeo A, Renga A, Graziano MD. A Systematic Review of Ship Wake Detection Methods in Satellite Imagery. Remote Sensing. 2024; 16(20):3775. https://doi.org/10.3390/rs16203775
Chicago/Turabian StyleMazzeo, Andrea, Alfredo Renga, and Maria Daniela Graziano. 2024. "A Systematic Review of Ship Wake Detection Methods in Satellite Imagery" Remote Sensing 16, no. 20: 3775. https://doi.org/10.3390/rs16203775
APA StyleMazzeo, A., Renga, A., & Graziano, M. D. (2024). A Systematic Review of Ship Wake Detection Methods in Satellite Imagery. Remote Sensing, 16(20), 3775. https://doi.org/10.3390/rs16203775