
Comparative Assessment of Neural Radiance Fields and Photogrammetry in Digital Heritage: Impact of Varying Image Conditions on 3D Reconstruction

 ,
,  ,
,  ,
,  ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
1.1. Background and Motivation
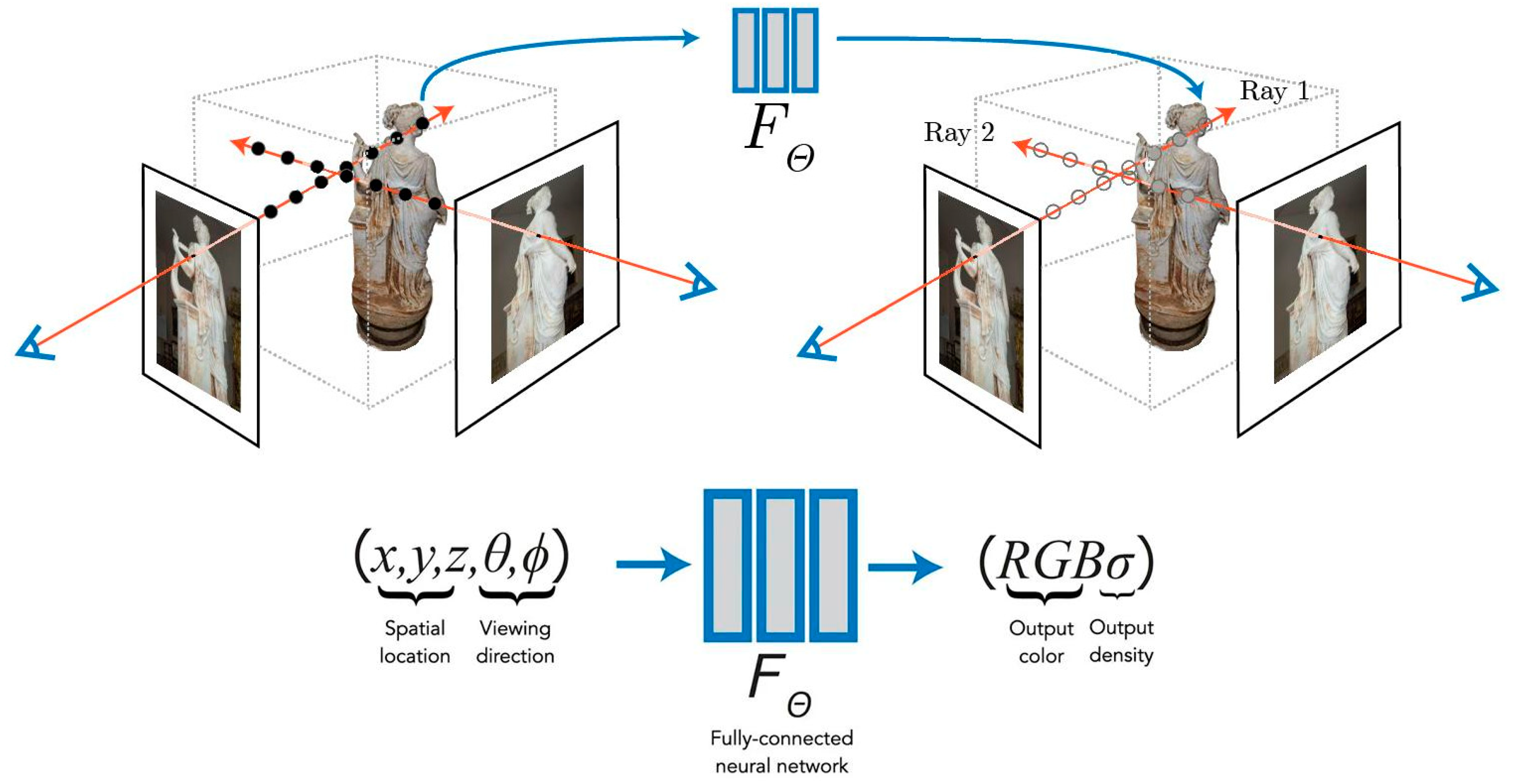
- First, as in photogrammetry, images are oriented in 3D space.
- Then, the sampled points, characterized by their three spatial dimensions and viewing direction, are processed by the MLP, resulting in color and volume density information as output.
1.2. Research Aim
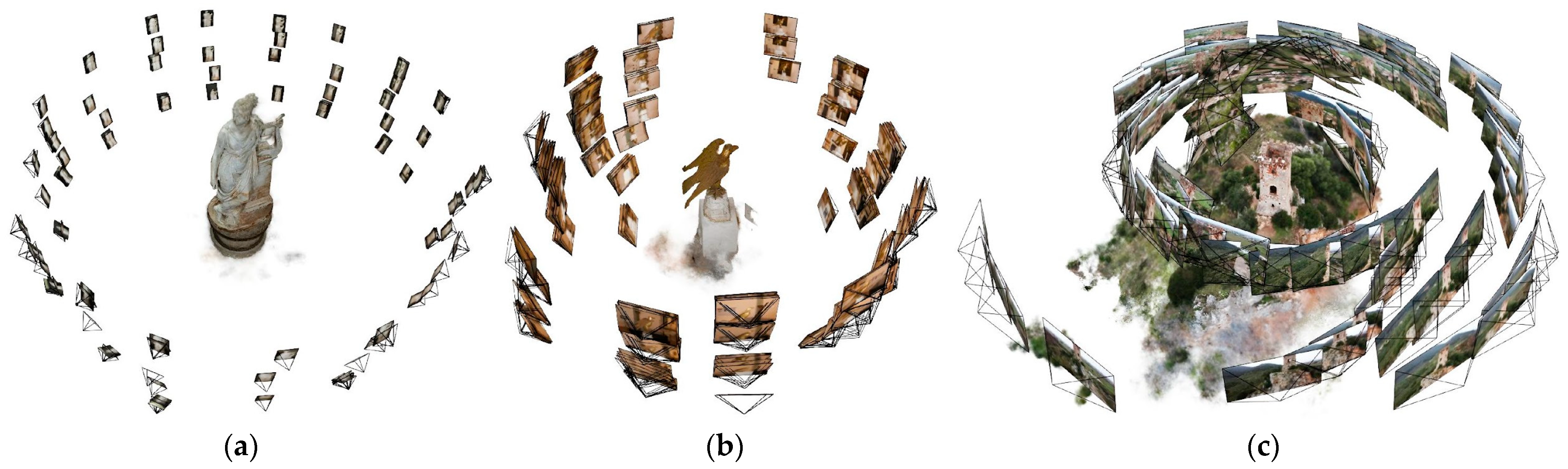
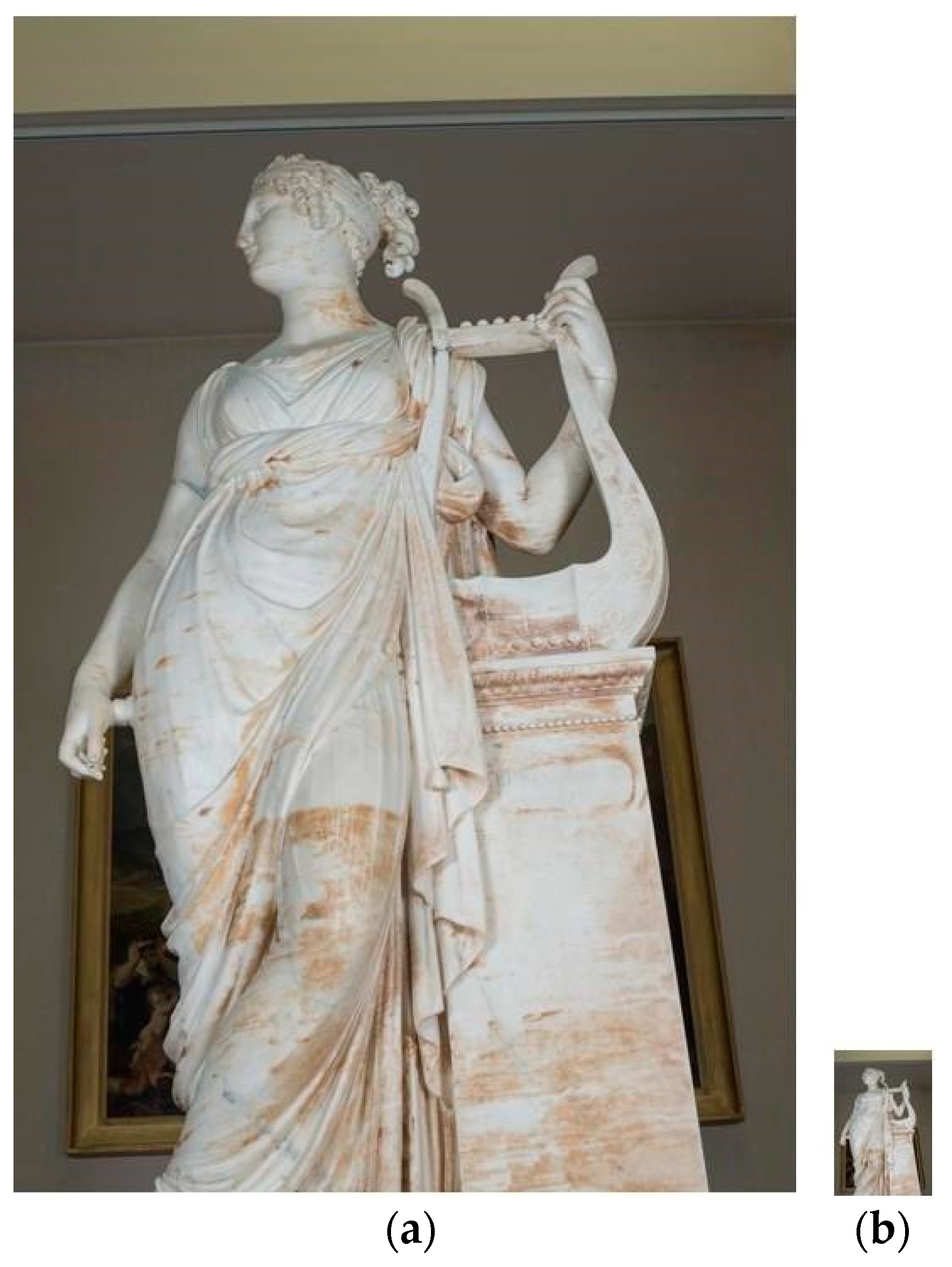
2. Case Studies
3. Methodology
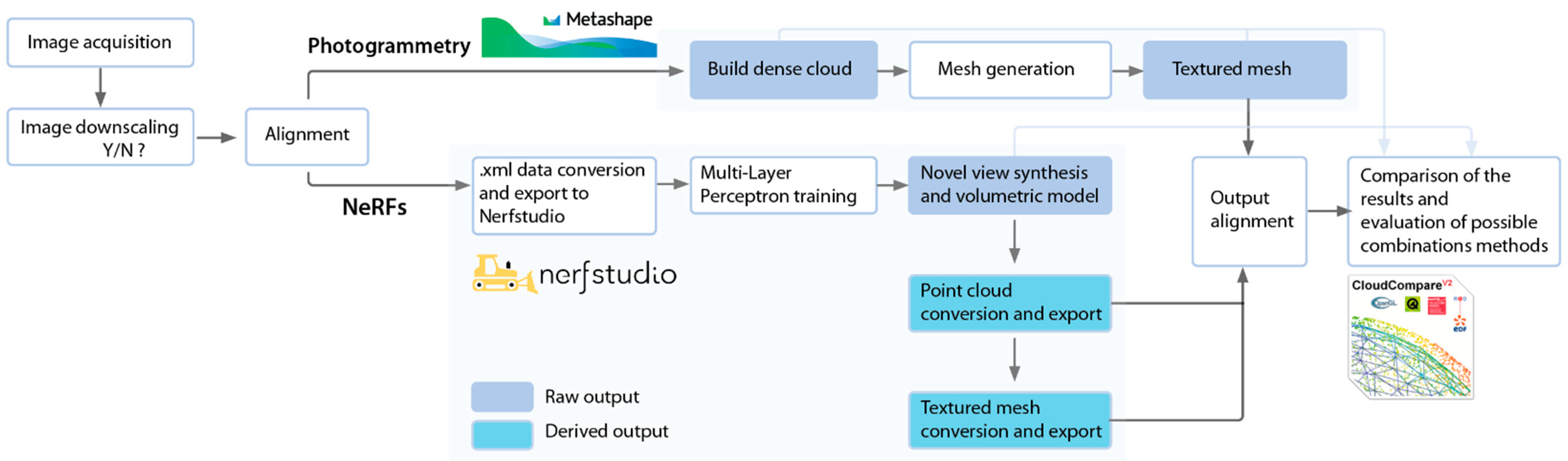
- Photogrammetric Procedure. This involved estimating the camera orientation parameters for sparse point cloud construction, generating a dense point cloud, creating a mesh, and extracting the textures. The software used for this task is Agisoft Metashape 2.1.0, and the alignment, dense point cloud, mesh and texture generation phases are run in high quality mode.
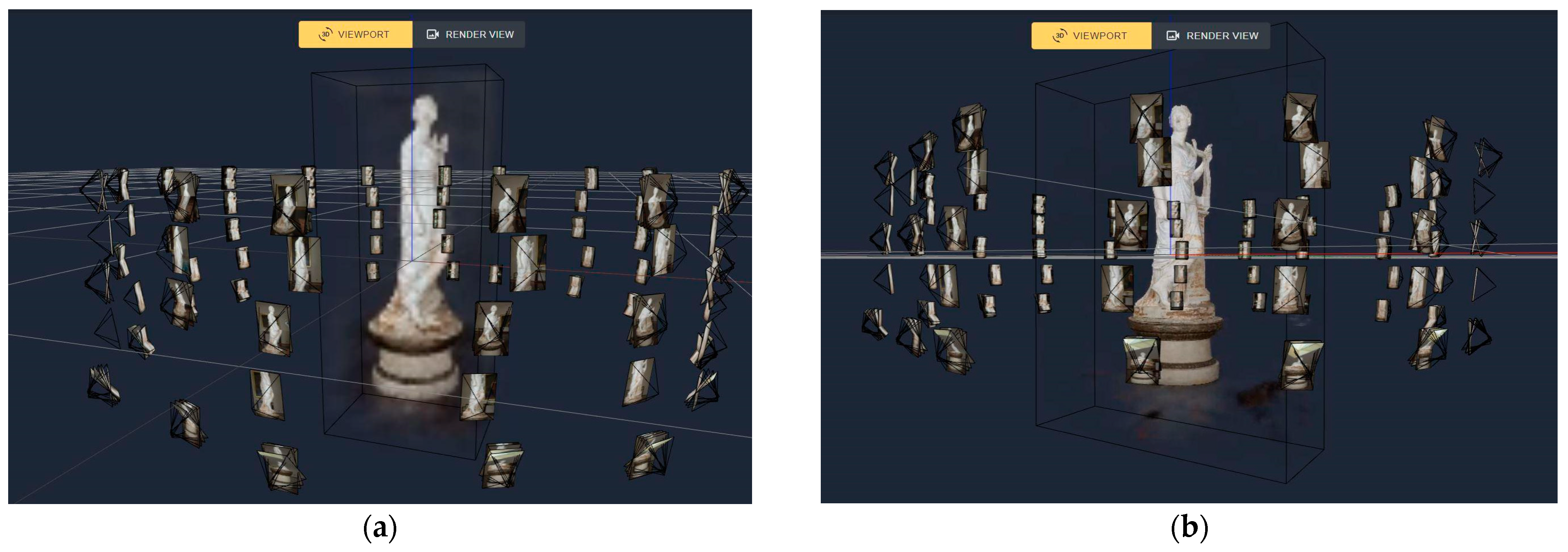
- NeRF-Based Reconstruction. This method requires the camera pose estimate to be known. With this input, a Multi-Layer Perceptron is trained for novel view synthesis, and the neural rendering (volumetric model) is generated. For the latter part, the Nerfstudio Application Programming Interface by Tancik et al. was used [43]. By default, this application applies a scaling factor to the images to reduce their dimensions and expedite the training process (downscaling).
- First: 233 photos, no downscale;
- Second: 233 photos with a downscale of factor 3 (3×);
- Third: a reduced dataset of 116 photos (~50% of the input dataset) with no downscale;
- Fourth: a reduced dataset of 116 photos with downscale 3×.
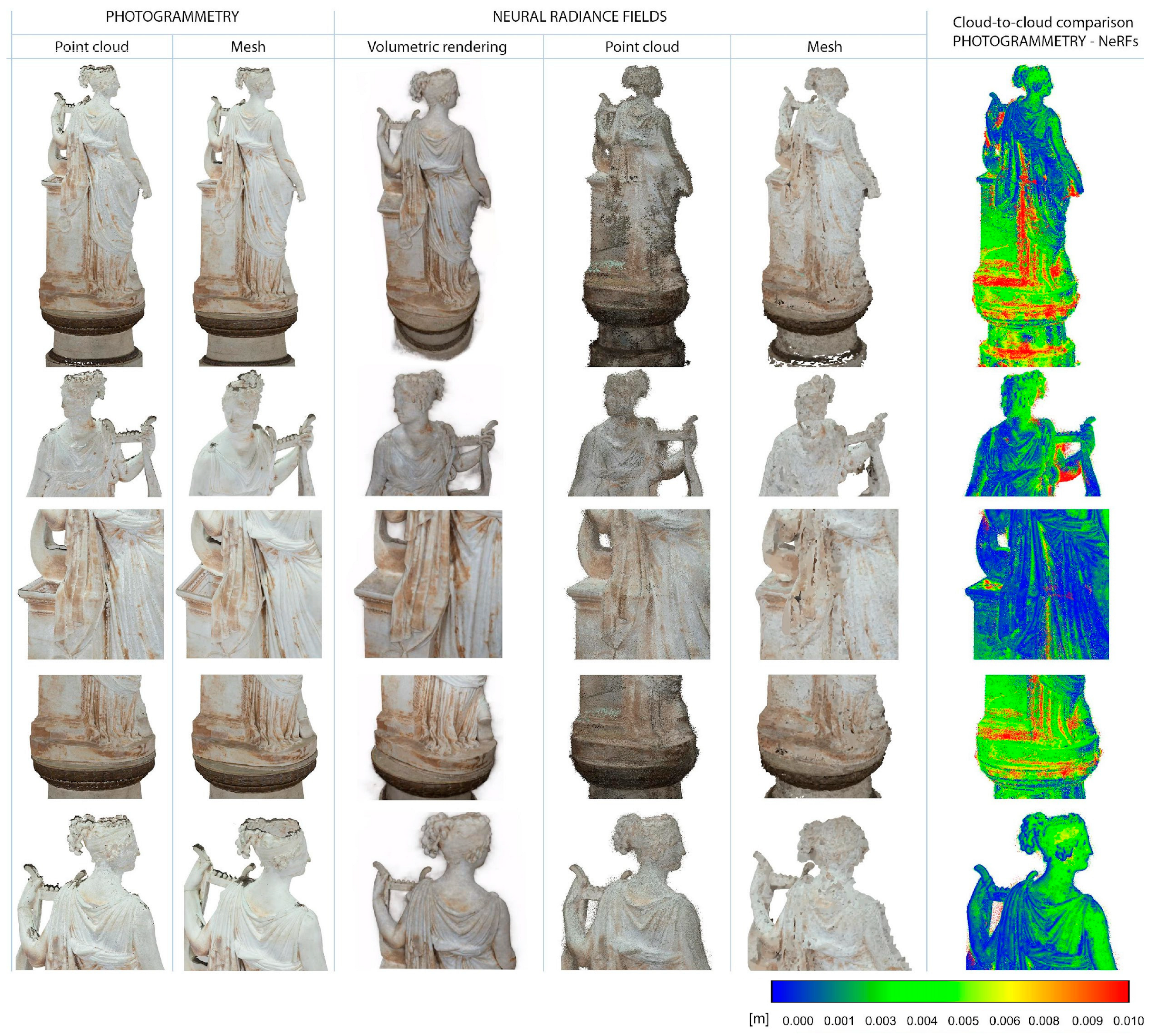
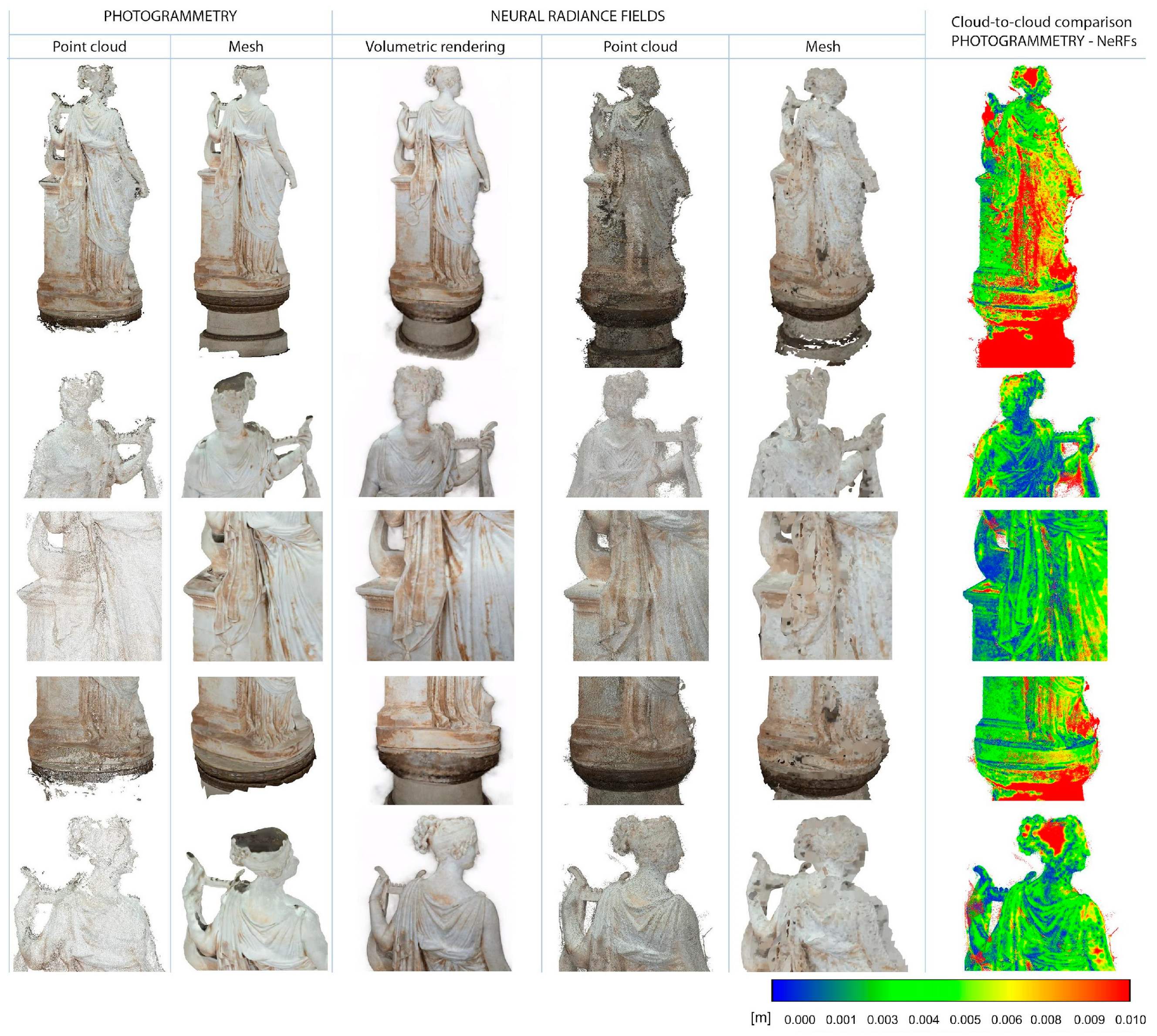
4. Results
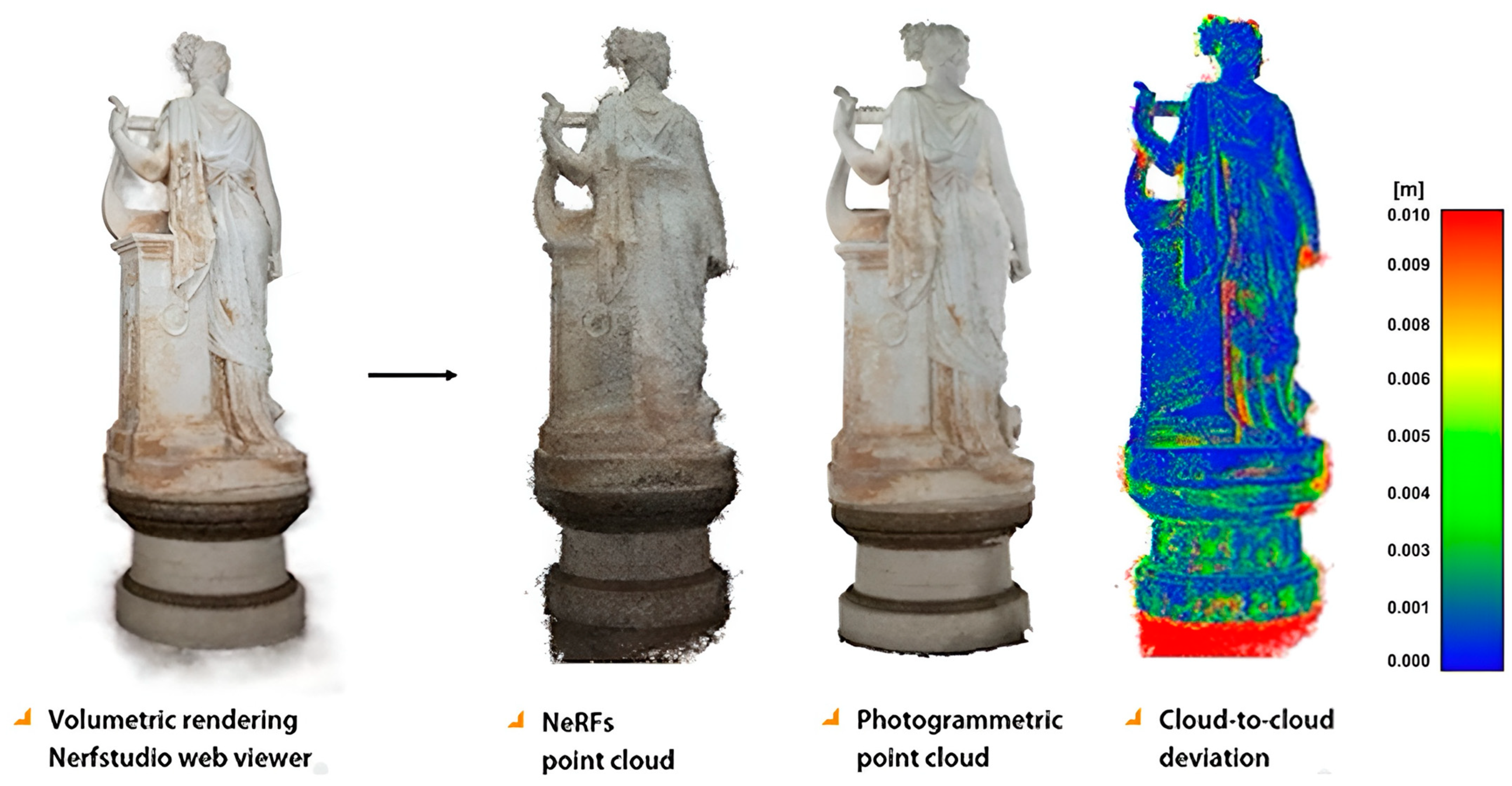
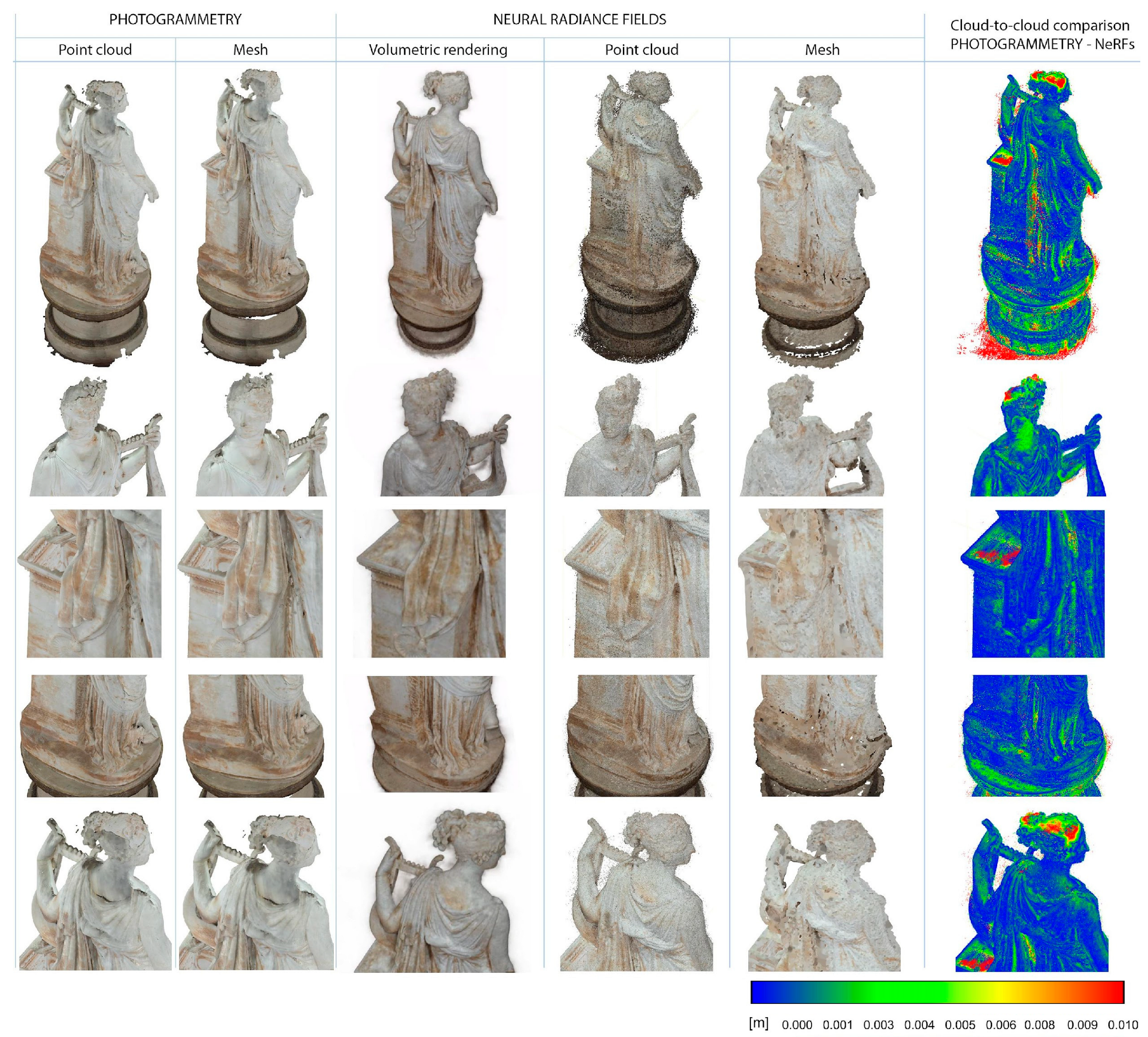
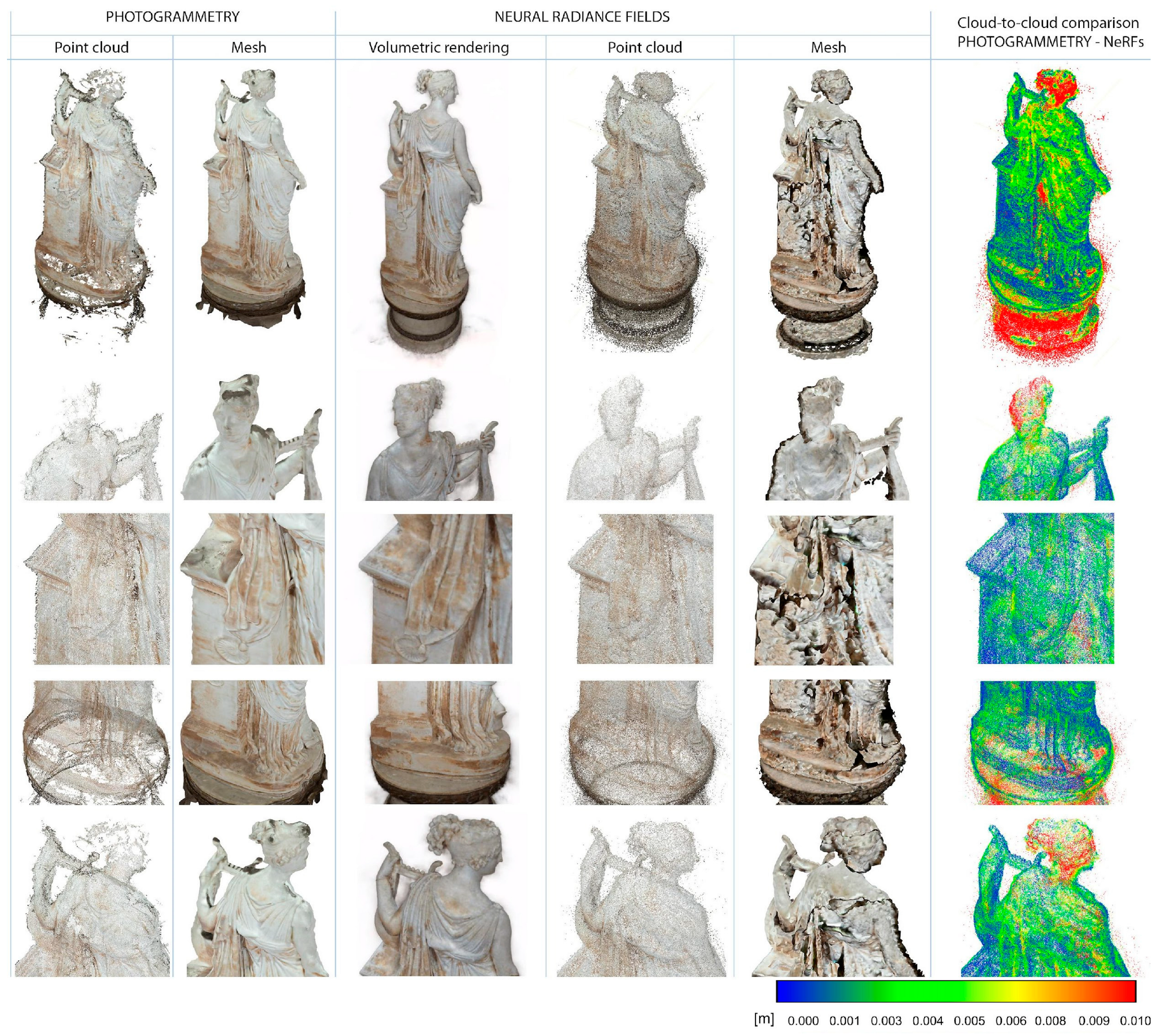
- Compared to photogrammetry, NeRFs may offer the ability to handle reduced image data or reduced resolution of the images, with lower quantitative information loss. For the 3rd and 4th cases analyzed, indeed, NeRFs capture details, such as the head and lower pedestal, which are absent in the photogrammetric output. This is true, however, if the reconstruction of camera poses is possible over the reduced datasets;
- NeRF neural renderings more faithfully reproduce the statue’s material texture compared to the textured mesh obtained through photogrammetry.
- However, NeRFs are more prone to noise, and for higher-resolution datasets, they may encounter challenges in capturing specific fine details compared to photogrammetry.
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Moyano, J.; Nieto-Julián, J.E.; Bienvenido-Huertas, D.; Marín-García, D. Validation of Close-Range Photogrammetry for Architectural and Archaeological Heritage: Analysis of Point Density and 3d Mesh Geometry. Remote Sens. 2020, 12, 3571. [Google Scholar] [CrossRef]
- Wojtkowska, M.; Kedzierski, M.; Delis, P. Validation of Terrestrial Laser Scanning and Artificial Intelligence for Measuring Deformations of Cultural Heritage Structures. Meas. J. Int. Meas. Confed. 2021, 167, 108291. [Google Scholar] [CrossRef]
- Díaz-Rodríguez, N.; Pisoni, G. Accessible Cultural Heritage through Explainable Artificial Intelligence; Association for Computing Machinery: New York, NY, USA, 2020; pp. 317–324. [Google Scholar]
- Škola, F.; Rizvić, S.; Cozza, M.; Barbieri, L.; Bruno, F.; Skarlatos, D.; Liarokapis, F. Virtual Reality with 360-Video Storytelling in Cultural Heritage: Study of Presence, Engagement, and Immersion. Sensors 2020, 20, 5851. [Google Scholar] [CrossRef]
- Fiorucci, M.; Khoroshiltseva, M.; Pontil, M.; Traviglia, A.; Del Bue, A.; James, S. Machine Learning for Cultural Heritage: A Survey. Pattern Recognit. Lett. 2020, 133, 102–108. [Google Scholar] [CrossRef]
- Pedersen, I.; Gale, N.; Mirza-Babaei, P.; Reid, S. More than Meets the Eye: The Benefits of Augmented Reality and Holographic Displays for Digital Cultural Heritage. J. Comput. Cult. Herit. 2017, 10, 11. [Google Scholar] [CrossRef]
- Trunfio, M.; Lucia, M.D.; Campana, S.; Magnelli, A. Innovating the Cultural Heritage Museum Service Model through Virtual Reality and Augmented Reality: The Effects on the Overall Visitor Experience and Satisfaction. J. Herit. Tour. 2022, 17, 1–19. [Google Scholar] [CrossRef]
- Gros, A.; Guillem, A.; De Luca, L.; Baillieul, É.; Duvocelle, B.; Malavergne, O.; Leroux, L.; Zimmer, T. Faceting the Post-Disaster Built Heritage Reconstruction Process within the Digital Twin Framework for Notre-Dame de Paris. Sci. Rep. 2023, 13, 5981. [Google Scholar] [CrossRef]
- Croce, V.; Caroti, G.; De Luca, L.; Jacquot, K.; Piemonte, A.; Véron, P. From the Semantic Point Cloud to Heritage-Building Information Modeling: A Semiautomatic Approach Exploiting Machine Learning. Remote Sens. 2021, 13, 461. [Google Scholar] [CrossRef]
- Bekele, M.K.; Pierdicca, R.; Frontoni, E.; Malinverni, E.S.; Gain, J. A Survey of Augmented, Virtual, and Mixed Reality for Cultural Heritage. J. Comput. Cult. Herit. 2018, 11, 7. [Google Scholar] [CrossRef]
- Bevilacqua, M.G.; Caroti, G.; Piemonte, A.; Terranova, A.A. Digital Technology and Mechatronic Systems for the Architectural 3D Metric Survey. Intell. Syst. Control Autom. Sci. Eng. 2018, 92, 161–180. [Google Scholar] [CrossRef]
- Rea, P.; Pelliccio, A.; Ottaviano, E.; Saccucci, M. The Heritage Management and Preservation Using the Mechatronic Survey. Int. J. Archit. Herit. 2017, 11, 1121–1132. [Google Scholar] [CrossRef]
- Croce, V.; Caroti, G.; Piemonte, A.; De Luca, L.; Véron, P. H-BIM and Artificial Intelligence: Classification of Architectural Heritage for Semi-Automatic Scan-to-BIM Reconstruction. Sensors 2023, 23, 2497. [Google Scholar] [CrossRef] [PubMed]
- Condorelli, F.; Rinaudo, F. Cultural Heritage Reconstruction from Historical Photographs and Videos. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, XLII-2, 259–265. [Google Scholar] [CrossRef]
- Mildenhall, B.; Srinivasan, P.P.; Tancik, M.; Barron, J.T.; Ramamoorthi, R.; Ng, R. NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis. arXiv 2020, arXiv:2003.08934. [Google Scholar] [CrossRef]
- Gao, K.; Gao, Y.; He, H.; Lu, D.; Xu, L.; Li, J. NeRF: Neural Radiance Field in 3D Vision, a Comprehensive Review. arXiv 2022, arXiv:2210.00379. [Google Scholar]
- Murtiyoso, A.; Grussenmeyer, P. Initial Assessment on the Use of State-of-the-Art NeRF Neural Network 3D Reconstruction for Heritage Documentation. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2023, XLVIII-M-2-2023, 1113–1118. [Google Scholar] [CrossRef]
- Lorensen, W.E.; Cline, H.E. Marching Cubes: A High Resolution 3D Surface Construction Algorithm. In Proceedings of the 14th Annual Conference on Computer Graphics and Interactive Techniques, Anaheim, CA, USA, 27–31 July 1987; Association for Computing Machinery: New York, NY, USA, 1987; pp. 163–169. [Google Scholar]
- Yastikli, N. Documentation of Cultural Heritage Using Digital Photogrammetry and Laser Scanning. J. Cult. Herit. 2007, 8, 423–427. [Google Scholar] [CrossRef]
- James, D.W.; Belblidia, F.; Eckermann, J.E.; Sienz, J. An Innovative Photogrammetry Color Segmentation Based Technique as an Alternative Approach to 3D Scanning for Reverse Engineering Design. Comput. Aided Des. Appl. 2017, 14, 1–16. [Google Scholar] [CrossRef]
- Fiz, J.I.; Martín, P.M.; Cuesta, R.; Subías, E.; Codina, D.; Cartes, A. Examples and Results of Aerial Photogrammetry in Archeology with UAV: Geometric Documentation, High Resolution Multispectral Analysis, Models and 3D Printing. Drones 2022, 6, 59. [Google Scholar] [CrossRef]
- Caroti, G.; Piemonte, A. Integration of Laser Scanning and Photogrammetry in Architecture Survey. Open Issue in Geomatics and Attention to Details. Commun. Comput. Inf. Sci. 2020, 1246, 170–185. [Google Scholar] [CrossRef]
- Guimarães, N.; Pádua, L.; Marques, P.; Silva, N.; Peres, E.; Sousa, J.J. Forestry Remote Sensing from Unmanned Aerial Vehicles: A Review Focusing on the Data, Processing and Potentialities. Remote Sens. 2020, 12, 1046. [Google Scholar] [CrossRef]
- Haneberg, W.C. Using Close Range Terrestrial Digital Photogrammetry for 3-D Rock Slope Modeling and Discontinuity Mapping in the United States. Bull. Eng. Geol. Environ. 2008, 67, 457–469. [Google Scholar] [CrossRef]
- Nicolae, C.; Nocerino, E.; Menna, F.; Remondino, F. Photogrammetry Applied to Problematic Artefacts. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, XL-5, 451–456. [Google Scholar] [CrossRef]
- Ippoliti, E.; Meschini, A.; Sicuranza, F. Digital Photogrammetry and Structure From Motion for Architectural Heritage: Comparison and Integration between Procedures. In Geospatial Intelligence: Concepts, Methodologies, Tools, and Applications; IGI Global: Hershey, PA, USA, 2019; Volume 2, pp. 959–1018. ISBN 978-1-5225-8055-3. [Google Scholar]
- Barron, J.T.; Mildenhall, B.; Tancik, M.; Hedman, P.; Martin-Brualla, R.; Srinivasan, P.P. Mip-NeRF: A Multiscale Representation for Anti-Aliasing Neural Radiance Fields. In Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision (ICCV), Montreal, QC, Canada, 10–17 October 2021; IEEE: Montreal, QC, Canada, 2021; pp. 5835–5844. [Google Scholar]
- Derksen, D.; Izzo, D. Shadow Neural Radiance Fields for Multi-View Satellite Photogrammetry. In Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Nashville, TN, USA, 19–25 June 2021; IEEE: Nashville, TN, USA, 2021; pp. 1152–1161. [Google Scholar]
- Semeraro, F.; Zhang, Y.; Wu, W.; Carroll, P. NeRF Applied to Satellite Imagery for Surface Reconstruction. arXiv 2023, arXiv:2304.04133. [Google Scholar]
- Kerr, J.; Fu, L.; Huang, H.; Avigal, Y.; Tancik, M.; Ichnowski, J.; Kanazawa, A.; Goldberg, K. Evo-NeRF: Evolving NeRF for Sequential Robot Grasping of Transparent Objects. In Proceedings of the 6th Conference on Robot Learning, Auckland, New Zealand, 14–18 December 2022. [Google Scholar]
- Zhou, A.; Kim, M.J.; Wang, L.; Florence, P.; Finn, C. NeRF in the Palm of Your Hand: Corrective Augmentation for Robotics via Novel-View Synthesis. arXiv 2023, arXiv:2301.08556. [Google Scholar]
- Adamkiewicz, M.; Chen, T.; Caccavale, A.; Gardner, R.; Culbertson, P.; Bohg, J.; Schwager, M. Vision-Only Robot Navigation in a Neural Radiance World. IEEE Robot. Autom. Lett. 2022, 7, 4606–4613. [Google Scholar] [CrossRef]
- Li, Y.; Lin, Z.-H.; Forsyth, D.; Huang, J.-B.; Wang, S. ClimateNeRF: Extreme Weather Synthesis in Neural Radiance Field. arXiv 2023, arXiv:2211.13226. [Google Scholar]
- Mergy, A.; Lecuyer, G.; Derksen, D.; Izzo, D. Vision-Based Neural Scene Representations for Spacecraft. In Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Nashville, TN, USA, 19–25 June 2021; IEEE: Nashville, TN, USA, 2021; pp. 2002–2011. [Google Scholar]
- Gafni, G.; Thies, J.; Zollhöfer, M.; Nießner, M. Dynamic Neural Radiance Fields for Monocular 4D Facial Avatar Reconstruction. arXiv 2023, arXiv:2012.03065. [Google Scholar]
- Mazzacca, G.; Karami, A.; Rigon, S.; Farella, E.M.; Trybala, P.; Remondino, F. NeRF for Heritage 3D Reconstruction. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2023, XLVIII-M-2-2023, 1051–1058. [Google Scholar] [CrossRef]
- Condorelli, F.; Rinaudo, F.; Salvadore, F.; Tagliaventi, S. A Comparison between 3D Reconstruction Using NERF Neural Networks and MVS Algorithms on Cultural Heritage Images. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2021, XLIII-B2-2021, 565–570. [Google Scholar] [CrossRef]
- Vandenabeele, L.; Häcki, M.; Pfister, M. Crowd-Sourced Surveying for Building Archaeology: The Potential of Structure From Motion (SFM) and Neural Radiance Fields (NERF). Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2023, XLVIII-M-2-2023, 1599–1605. [Google Scholar] [CrossRef]
- Balloni, E.; Gorgoglione, L.; Paolanti, M.; Mancini, A.; Pierdicca, R. Few Shot Photogrametry: A Comparison Between Nerf and Mvs-Sfm for the Documentation of Cultural Heritage. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2023, 48M2, 155–162. [Google Scholar] [CrossRef]
- Pansoni, S.; Tiribelli, S.; Paolanti, M.; Stefano, F.D.; Frontoni, E.; Malinverni, E.S.; Giovanola, B. Artificial Intelligence and Cultural Heritage: Design and Assessment of an Ethical Framework. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2023, XLVIII-M-2-2023, 1149–1155. [Google Scholar] [CrossRef]
- Croce, V.; Caroti, G.; De Luca, L.; Piemonte, A.; Véron, P. Neural Radiance Fields (NERF): Review and Potential Applications to Digital Cultural Heritage. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2023, XLVIII-M-2-2023, 453–460. [Google Scholar] [CrossRef]
- Billi, D.; Rechichi, P.; Montalbano, G.; Croce, V. La Torre Degli Upezzinghi a Caprona: Analisi storico-archivistica e rilievo digitale per la documentazione dell’evoluzione temporale. In Defensive Architecture of the Mediterranean, Proceedings of the International Conference on Fortifications of the Mediterranean Coast FORTMED 2023, Pisa, Italy, 23–25 March 2023; Bevilacqua, M.G., Ulivieri, D., Eds.; Pisa University Press: Pisa, Italy, 2023; Volume XIII, pp. 391–400. [Google Scholar]
- Tancik, M.; Weber, E.; Ng, E.; Li, R.; Yi, B.; Kerr, J.; Wang, T.; Kristoffersen, A.; Austin, J.; Salahi, K.; et al. Nerfstudio: A Modular Framework for Neural Radiance Field Development. In Proceedings of the SIGGRAPH’23: Special Interest Group on Computer Graphics and Interactive Techniques Conference, Los Angeles, CA, USA, 6–10 August 2023. [Google Scholar]
- Kazhdan, M.; Bolitho, M.; Hoppe, H. Poisson Surface Reconstruction. In Proceedings of the Eurographics Symposium on Geometry Processing, Sardinia, Italy, 26–28 June 2006. [Google Scholar]
- European Commission. Directorate-General for Communications Networks, Content and Technology, Study on Quality in 3D Digitisation of Tangible Cultural Heritage—Mapping Parameters, Formats, Standards, Benchmarks, Methodologies, and Guidelines—Executive Summary; Publications Office of the European Union: Luxembourg, 2022; Available online: https://data.europa.eu/doi/10.2759/581678 (accessed on 22 December 2023).
- Zhi, S.; Laidlow, T.; Leutenegger, S.; Davison, A.J. In-Place Scene Labelling and Understanding with Implicit Scene Representation. arXiv 2021, arXiv:2103.15875. [Google Scholar]
- Martin-Brualla, R.; Radwan, N.; Sajjadi, M.S.M.; Barron, J.T.; Dosovitskiy, A.; Duckworth, D. NeRF in the Wild: Neural Radiance Fields for Unconstrained Photo Collections. arXiv 2021, arXiv:2008.02268. [Google Scholar]
- Deng, N.; He, Z.; Ye, J.; Duinkharjav, B.; Chakravarthula, P.; Yang, X.; Sun, Q. FoV-NeRF: Foveated Neural Radiance Fields for Virtual Reality. IEEE Trans. Visual. Comput. Graph. 2022, 28, 3854–3864. [Google Scholar] [CrossRef]









Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Croce, V.; Billi, D.; Caroti, G.; Piemonte, A.; De Luca, L.; Véron, P. Comparative Assessment of Neural Radiance Fields and Photogrammetry in Digital Heritage: Impact of Varying Image Conditions on 3D Reconstruction. Remote Sens. 2024, 16, 301. https://doi.org/10.3390/rs16020301
Croce V, Billi D, Caroti G, Piemonte A, De Luca L, Véron P. Comparative Assessment of Neural Radiance Fields and Photogrammetry in Digital Heritage: Impact of Varying Image Conditions on 3D Reconstruction. Remote Sensing. 2024; 16(2):301. https://doi.org/10.3390/rs16020301
Chicago/Turabian StyleCroce, Valeria, Dario Billi, Gabriella Caroti, Andrea Piemonte, Livio De Luca, and Philippe Véron. 2024. "Comparative Assessment of Neural Radiance Fields and Photogrammetry in Digital Heritage: Impact of Varying Image Conditions on 3D Reconstruction" Remote Sensing 16, no. 2: 301. https://doi.org/10.3390/rs16020301
APA StyleCroce, V., Billi, D., Caroti, G., Piemonte, A., De Luca, L., & Véron, P. (2024). Comparative Assessment of Neural Radiance Fields and Photogrammetry in Digital Heritage: Impact of Varying Image Conditions on 3D Reconstruction. Remote Sensing, 16(2), 301. https://doi.org/10.3390/rs16020301