
A Gaussian Mixture CPHD Filter for Multi-Target Tracking in Target-Dependent False Alarms




Abstract
1. Introduction
2. Problem Formulation and Basic Models
2.1. Target-Dependent False Alarms
- The target-dependent false alarms generated from one target can be modeled by an I.I.D. cluster process.
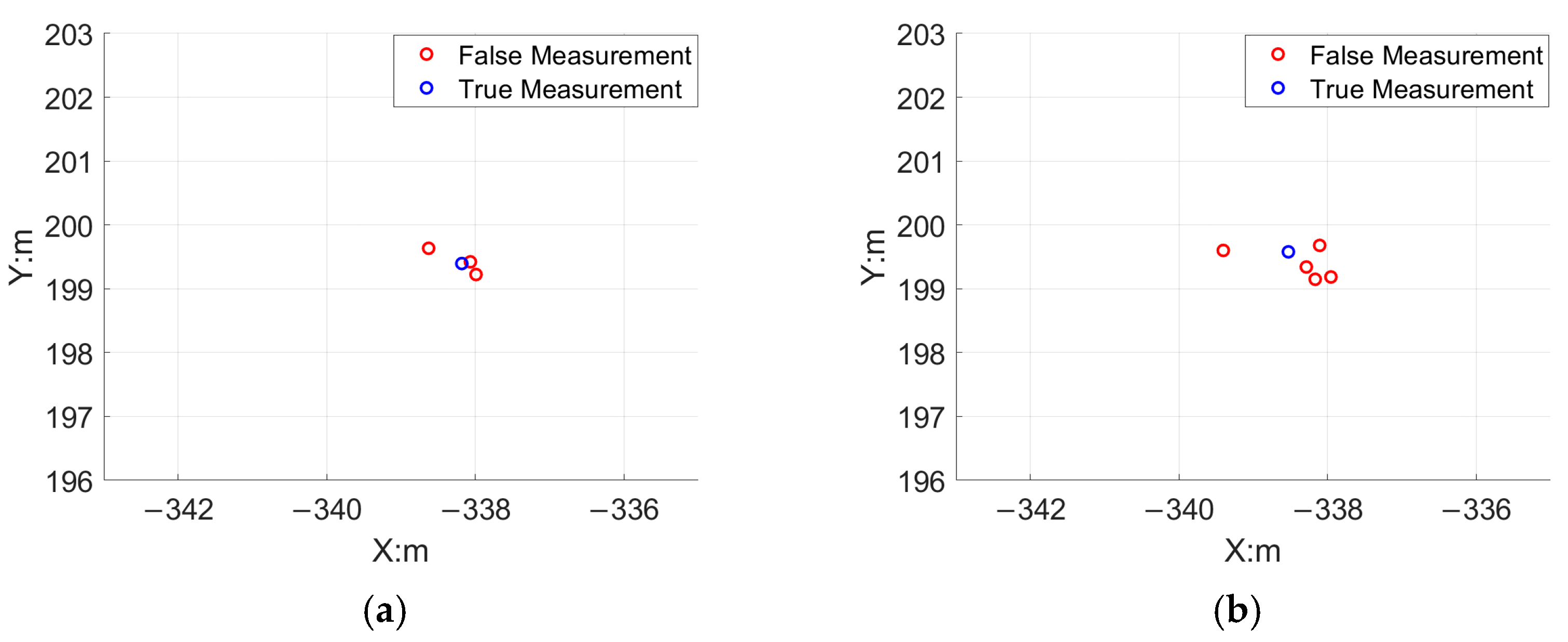
- True measurements and false alarms of the same target are very close to each other in three-dimensional space. It can be assumed that their spatial distributions are identical.
- The number of false alarms between two adjacent time steps are independent.
2.2. Observation Model with Target-Dependent False Alarms
- 4.
- Disappearance of existing targets: the disappearance probability of any target at time k + 1 is denoted by . The number of disappeared targets is denoted by .
- 5.
- Appearance of new targets: completely new targets will enter the observation area at time k + 1;
3. The Novel GM-CPHD Filter
3.1. CPHD Filter Predictor
3.2. CPHD Filter Corrector with Target-Dependent False Alarms
3.3. Closed-Form Gaussian Mixture Solution
- 1.
- The posterior PHD density at time k and the birth density at time k + 1 are both Gaussian mixture densities:
- 2.
- The transition density and likelihood density for each target are linear-Gaussian;
- 3.
- The probability of surviving and detection are both constants;
- 4.
- Target-independent clutters and target-dependent false alarms are independent cluster processes.
3.4. Clustering, Pruning and Merging
3.5. Initialization of Gaussian Components
4. Simulation and Experimental Results
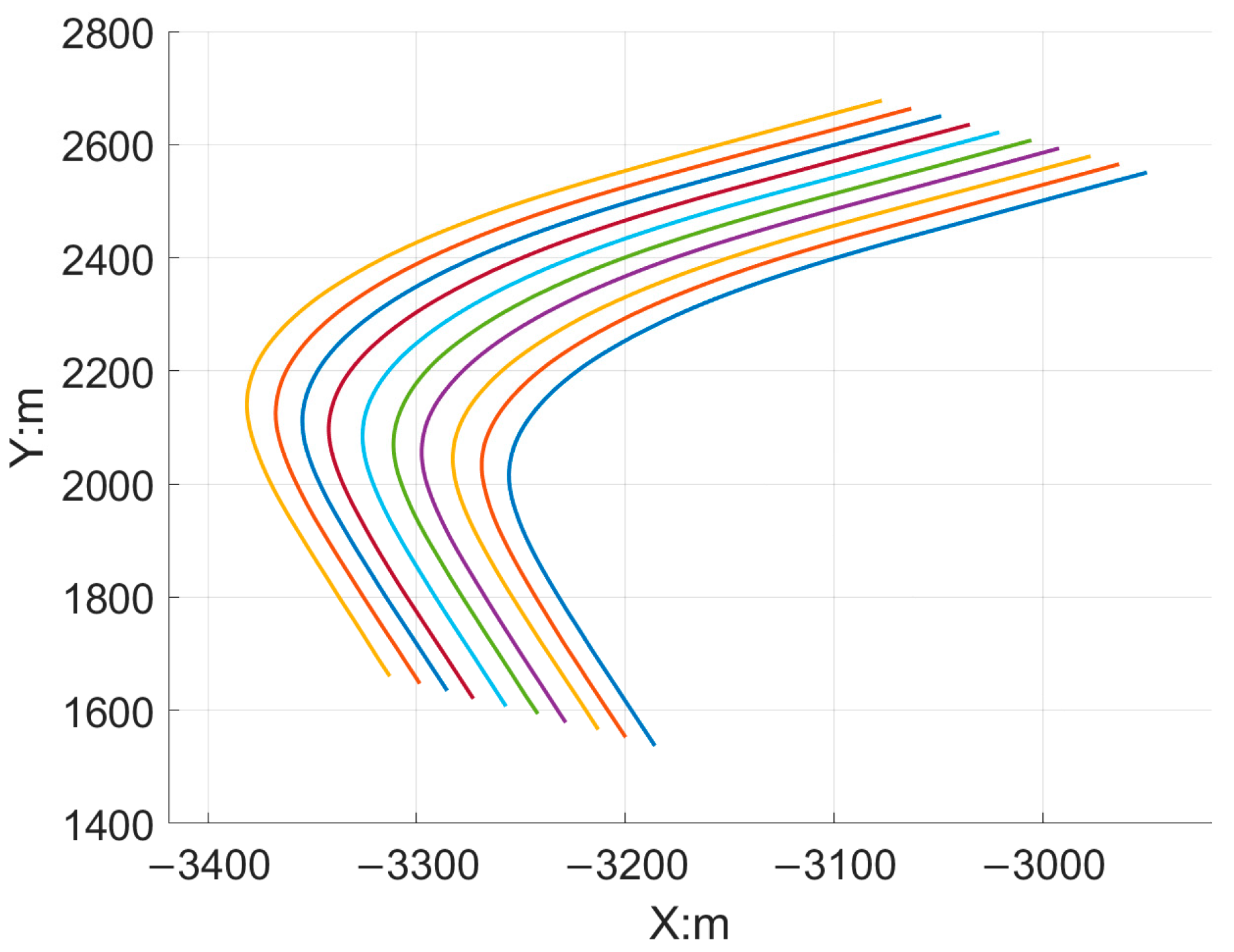
4.1. Simulation Result
4.1.1. Simulation Scenario and Setups
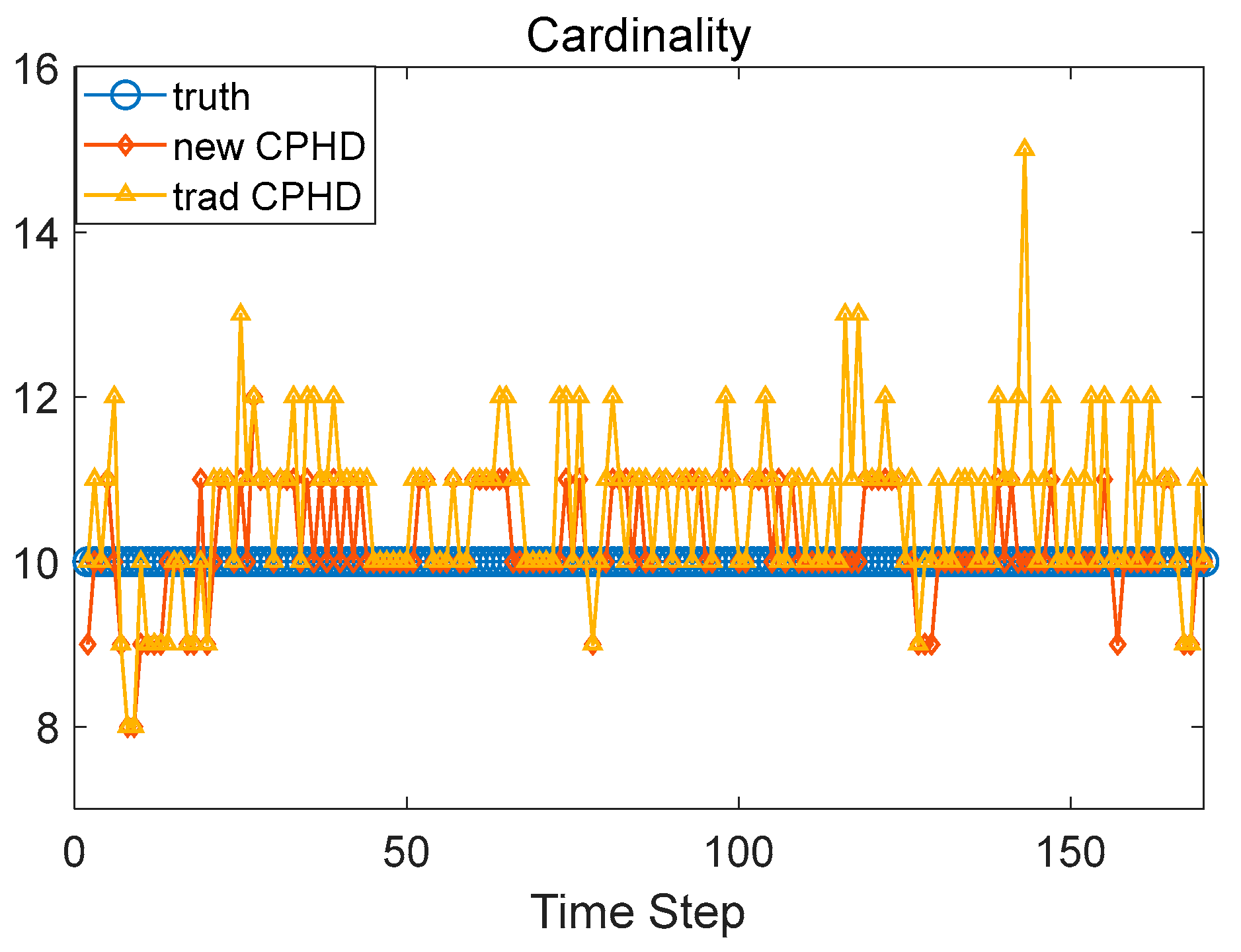
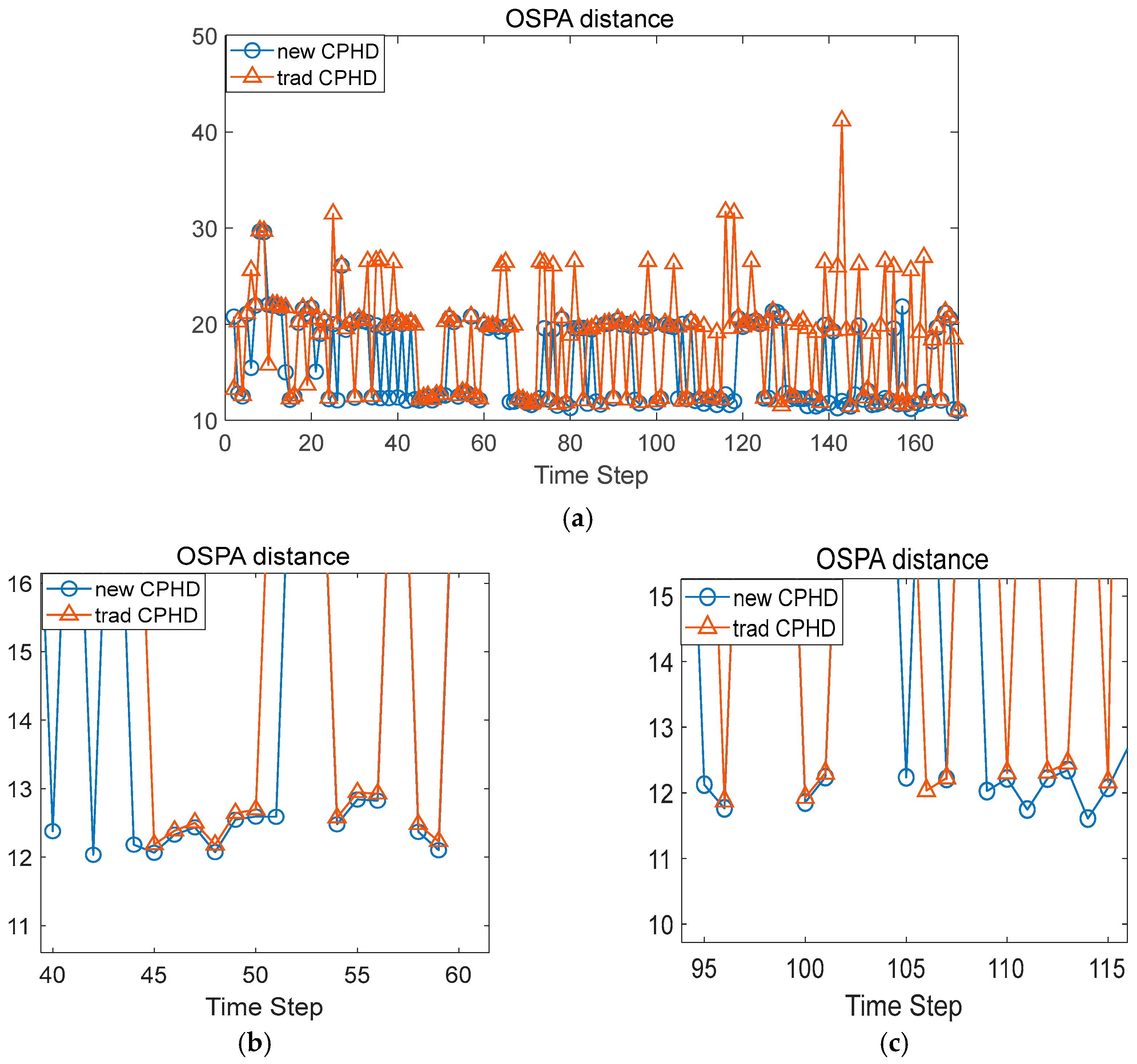
4.1.2. Analysis of Performance
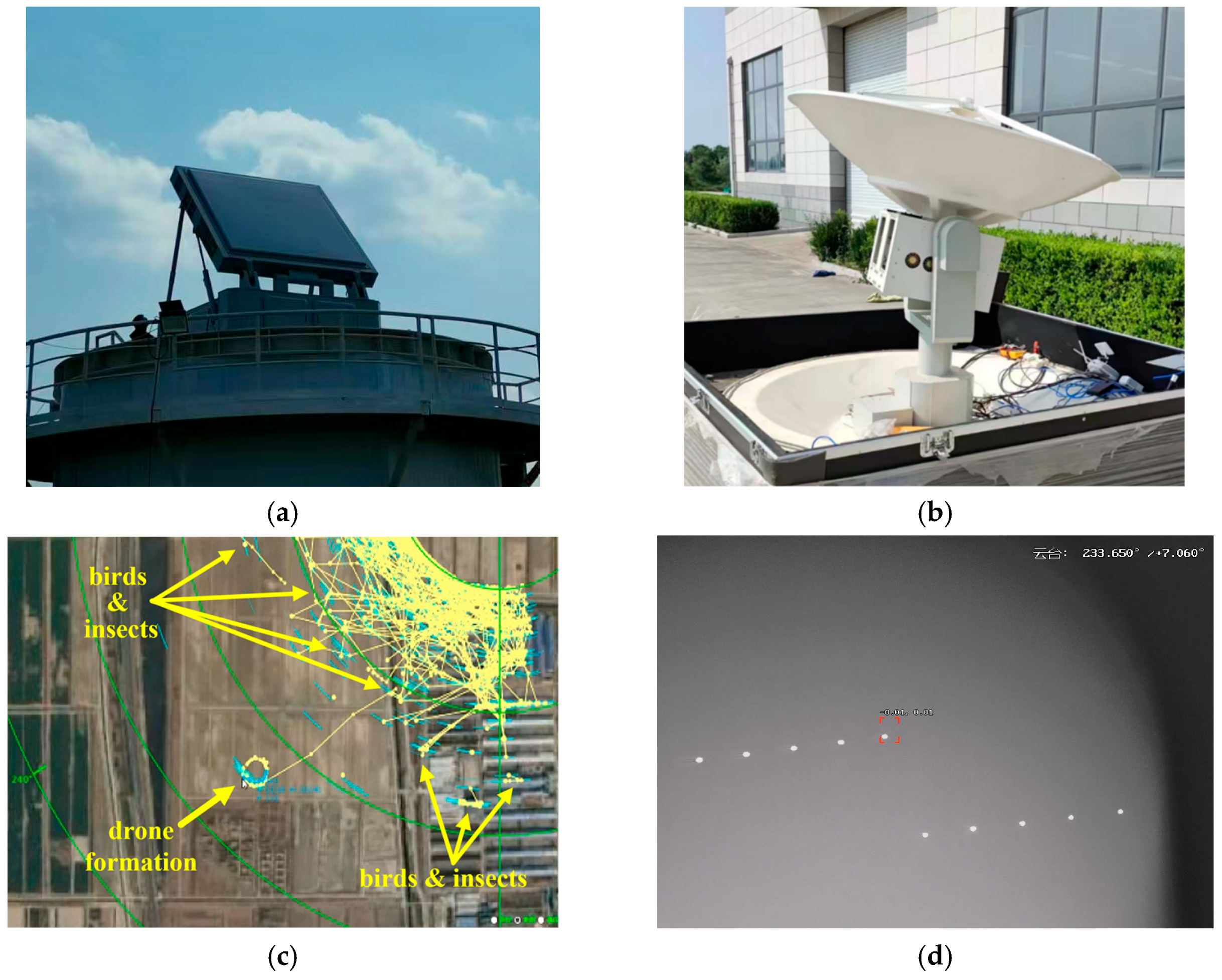
4.2. Experimental Results
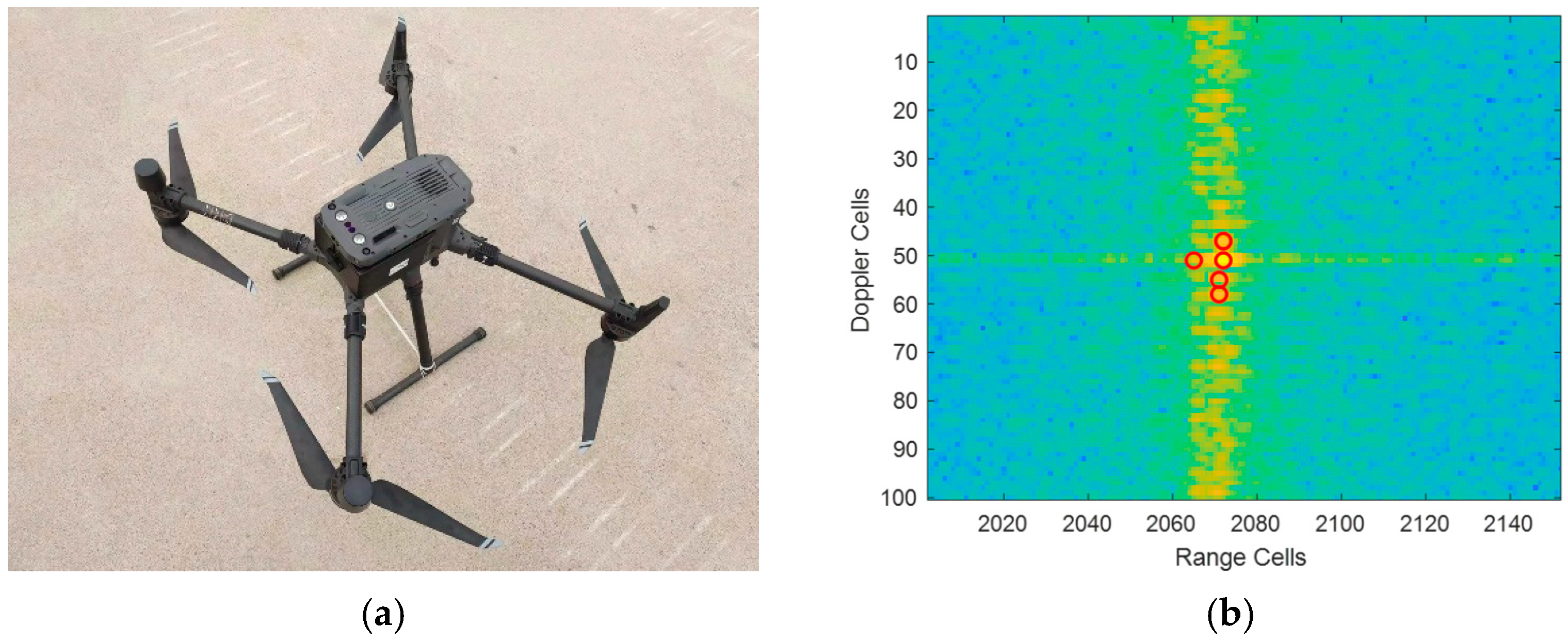
4.2.1. Experiment Program and Radar System
4.2.2. Analysis of Performance
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Van Doren, B.M.; Horton, K.G. A continental system for forecasting bird migration. Science 2018, 361, 1115–1118. [Google Scholar] [CrossRef] [PubMed]
- Metz, I.C.; Ellerbroek, J.; Mühlhausen, T.; Kügler, D.; Hoekstra, J.M. The bird strike challenge. Aerospace 2020, 7, 26. [Google Scholar] [CrossRef]
- Phillips, A.C.; Majumdar, S.; Washburn, B.E.; Mayer, D.; Swearingin, R.M.; Herricks, E.E.; Guerrant, T.L.; Beckerman, S.F.; Pullins, C.K. Efficacy of avian radar systems for tracking birds on the airfield of a large international airport. Wildl. Soc. Bull. 2018, 42, 467–477. [Google Scholar] [CrossRef]
- Plonczkier, P.; Simms, I.C. Radar monitoring of migrating pink-footed geese: Behavioural responses to offshore wind farm development. J. Appl. Ecol. 2012, 49, 1187–1194. [Google Scholar] [CrossRef]
- Yang, S.; Baum, M. Tracking the Orientation and Axes Lengths of an Elliptical Extended Object. IEEE Trans. Signal Process. 2019, 67, 4720–4729. [Google Scholar] [CrossRef]
- Horridge, P.; Maskell, S. Real-Time Tracking of Hundreds of Targets with Efficient Exact JPDAF Implementation. In Proceedings of the 2006 9th International Conference on Information Fusion, Florence, Italy, 10–13 July 2006; pp. 1–8. [Google Scholar]
- Li, Q.; Gan, R.; Liang, J.; Godsill, S.J. An Adaptive and Scalable Multi-Object Tracker Based on the Non-Homogeneous Poisson Process. IEEE Trans. Signal Process. 2023, 71, 105–120. [Google Scholar] [CrossRef]
- Wieneke, M.; Koch, W. A PMHT approach for extended objects and object groups. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 2349–2370. [Google Scholar] [CrossRef]
- Lau, R.A.; Williams, J.L. Tracking a coordinated group using expectation maximization. In Proceedings of the 2013 IEEE Eighth International Conference on Intelligent Sensors, Sensor Networks and Information Processing, Melbourne, Australia, 2–5 April 2013. [Google Scholar]
- Mahler, R. Multitarget Bayes filtering via first-order multitarget moments. IEEE Trans. Aerosp. Electron. Syst. 2003, 39, 1152–1178. [Google Scholar] [CrossRef]
- Mahler, R. Statistical Multisource-Multitarget Information Fusion; Artech House: Norwood, MA, USA, 2007. [Google Scholar]
- Vo, B.N.; Ma, W.K. The Gaussian Mixture Probability Hypothesis Density Filter. IEEE Trans. Signal Process. 2006, 54, 4091–4104. [Google Scholar] [CrossRef]
- Mahler, R. PHD filters of higher order in target number. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 1523–1543. [Google Scholar] [CrossRef]
- Vo, B.T.; Vo, B.N.; Cantoni, A. Analytic Implementations of the Cardinalized Probability Hypothesis Density Filter. IEEE Trans. Signal Process. 2007, 55, 3553–3567. [Google Scholar] [CrossRef]
- Lundquist, C.; Granström, K.; Orguner, U. An Extended Target CPHD Filter and a Gamma Gaussian Inverse Wishart Implementation. IEEE J. Sel. Top. Signal Process. 2013, 7, 472–483. [Google Scholar] [CrossRef]
- Beard, M.; Vo, B.T.; Vo, B.N.; Arulampalam, S. A Partially Uniform Target Birth Model for Gaussian Mixture PHD/CPHD Filtering. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 2835–2844. [Google Scholar] [CrossRef]
- Melo, F.E.D.; Maskell, S. A CPHD Approximation Based on a Discrete-Gamma Cardinality Model. IEEE Trans. Signal Process. 2019, 67, 336–350. [Google Scholar] [CrossRef]
- García-Fernández, Á.F.; Svensson, L. Trajectory PHD and CPHD Filters. IEEE Trans. Signal Process. 2019, 67, 5702–5714. [Google Scholar] [CrossRef]
- Vo, B.T.; Vo, B.N. The para-normal Bayes multi-target filter and the spooky effect. In Proceedings of the 2012 15th International Conference on Information Fusion, Singapore, 9–12 July 2012; pp. 173–180. [Google Scholar]
- Franken, D.; Schmidt, M.; Ulmke, M. “Spooky Action at a Distance” in the Cardinalized Probability Hypothesis Density Filter. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 1657–1664. [Google Scholar] [CrossRef]
- Ouyang, C.; Ji, H.B.; Tian, Y. Improved Gaussian Mixture CPHD Tracker for Multitarget Tracking. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 1177–1191. [Google Scholar] [CrossRef]
- Mahler, R.; El-Fallah, A. PHD filtering in known target-dependent clutter. In Proceedings of the Signal Processing Sensor Fusion, and Target Recognition XIX, Orlando, FL, USA, 27 April 2010; pp. 203–214. [Google Scholar]
- Palamà, R.; Fioranelli, F.; Ritchie, M.; Inggs, M.R.; Lewis, S.; Griffiths, H. Measurements of Multistatic X&L Band Radar Signatures of UAVS. In Proceedings of the 2019 International Radar Conference (RADAR), Toulon, France, 23–27 September 2019; pp. 1–5. [Google Scholar]
- Beasley, P.; Ritchie, M.; Griffiths, H.; Miceli, W.; Inggs, M.; Lewis, S.; Kahn, B. Multistatic Radar Measurements of UAVs at X-band and L-band. In Proceedings of the 2020 IEEE Radar Conference (RadarConf20), Florence, Italy, 21–25 September 2020; pp. 1–6. [Google Scholar]
- Rahman, S.; Robertson, D.A. Radar micro-Doppler signatures of drones and birds at K-band and W-band. Sci. Rep. 2018, 8, 17396. [Google Scholar] [CrossRef] [PubMed]
- Björklund, S. Target Detection and Classification of Small Drones by Boosting on Radar Micro-Doppler. In Proceedings of the 2018 15th European Radar Conference (EuRAD), Madrid, Spain, 26–28 September 2018; pp. 182–185. [Google Scholar]
- Jahangir, M.; Atkinson, G.M.; Antoniou, M.; Baker, C.J.; Sadler, J.P.; Reynolds, S.J. Measurements of Birds and Drones with L-Band Staring Radar. In Proceedings of the 2021 21st International Radar Symposium (IRS), Berlin, Germany, 21–22 June 2021; pp. 1–10. [Google Scholar]
- Vo, B.T.; Vo, B.N.; Cantoni, A. The Cardinalized Probability Hypothesis Density Filter for Linear Gaussian Multi-Target Models. In Proceedings of the 2006 40th Annual Conference on Information Sciences and Systems, Princeton, NJ, USA, 22–24 March 2006; pp. 681–686. [Google Scholar]
- Ulmke, M.; Erdinc, O.; Willett, P. Gaussian mixture cardinalized PHD filter for ground moving target tracking. In Proceedings of the 2007 10th International Conference on Information Fusion, Quebec, QC, Canada, 9–12 July 2007; pp. 1–8. [Google Scholar]
- Granstrom, K.; Lundquist, C.; Orguner, O. Extended Target Tracking using a Gaussian-Mixture PHD Filter. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 3268–3286. [Google Scholar] [CrossRef]
- Li, T.; Corchado, J.M.; Chen, H. Distributed Flooding-then-Clustering: A Lazy Networking Approach for Distributed Multiple Target Tracking. In Proceedings of the 2018 21st International Conference on Information Fusion (FUSION), Cambridge, UK, 10–13 July 2018; pp. 2415–2422. [Google Scholar]
- Vásárhelyi, G.; Virágh, C.; Somorjai, G.; Tarcai, N.; Szörenyi, T.; Nepusz, T.; Vicsek, T. Outdoor flocking and formation flight with autonomous aerial robots. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 3866–3873. [Google Scholar]
- Ristic, B.; Vo, B.N.; Clark, D.; Vo, B.T. A Metric for Performance Evaluation of Multi-Target Tracking Algorithms. IEEE Trans. Signal Process. 2011, 59, 3452–3457. [Google Scholar] [CrossRef]
- Wang, X.; Zhai, W.; Zhang, X.; Wang, X.; Amin, M.G. Enhanced Automotive Sensing Assisted by Joint Communication and Cognitive Sparse MIMO Radar. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 4782–4799. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Number of targets | 10 |
| Simulation update time | 0.04 s |
| Characteristic time | 5 s |
| Self-propelling velocity | 2 m/s |
| Collective velocity | [−10 m/s, −10 m/s, 0] |
| Turn rate | 0.003 rad/s |
| Upper bound for repulsion | 15 m |
| Lower bound for repulsion | 5 m |
| Upper bound for alignment | 80 m |
| Spring constant | 0.2 |
| Viscous friction coefficient | 2 |
| Constraint coefficient | 0 |
| Initial distance between neighbors | 20 m |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, Q.; Wang, R.; Dou, L.; Jiao, L.; Hu, C. A Gaussian Mixture CPHD Filter for Multi-Target Tracking in Target-Dependent False Alarms. Remote Sens. 2024, 16, 251. https://doi.org/10.3390/rs16020251
Jiang Q, Wang R, Dou L, Jiao L, Hu C. A Gaussian Mixture CPHD Filter for Multi-Target Tracking in Target-Dependent False Alarms. Remote Sensing. 2024; 16(2):251. https://doi.org/10.3390/rs16020251
Chicago/Turabian StyleJiang, Qi, Rui Wang, Libin Dou, Longxiang Jiao, and Cheng Hu. 2024. "A Gaussian Mixture CPHD Filter for Multi-Target Tracking in Target-Dependent False Alarms" Remote Sensing 16, no. 2: 251. https://doi.org/10.3390/rs16020251
APA StyleJiang, Q., Wang, R., Dou, L., Jiao, L., & Hu, C. (2024). A Gaussian Mixture CPHD Filter for Multi-Target Tracking in Target-Dependent False Alarms. Remote Sensing, 16(2), 251. https://doi.org/10.3390/rs16020251