
Classification and Mapping of Fuels in Mediterranean Forest Landscapes Using a UAV-LiDAR System and Integration Possibilities with Handheld Mobile Laser Scanner Systems




Abstract
1. Introduction
2. Materials and Methods
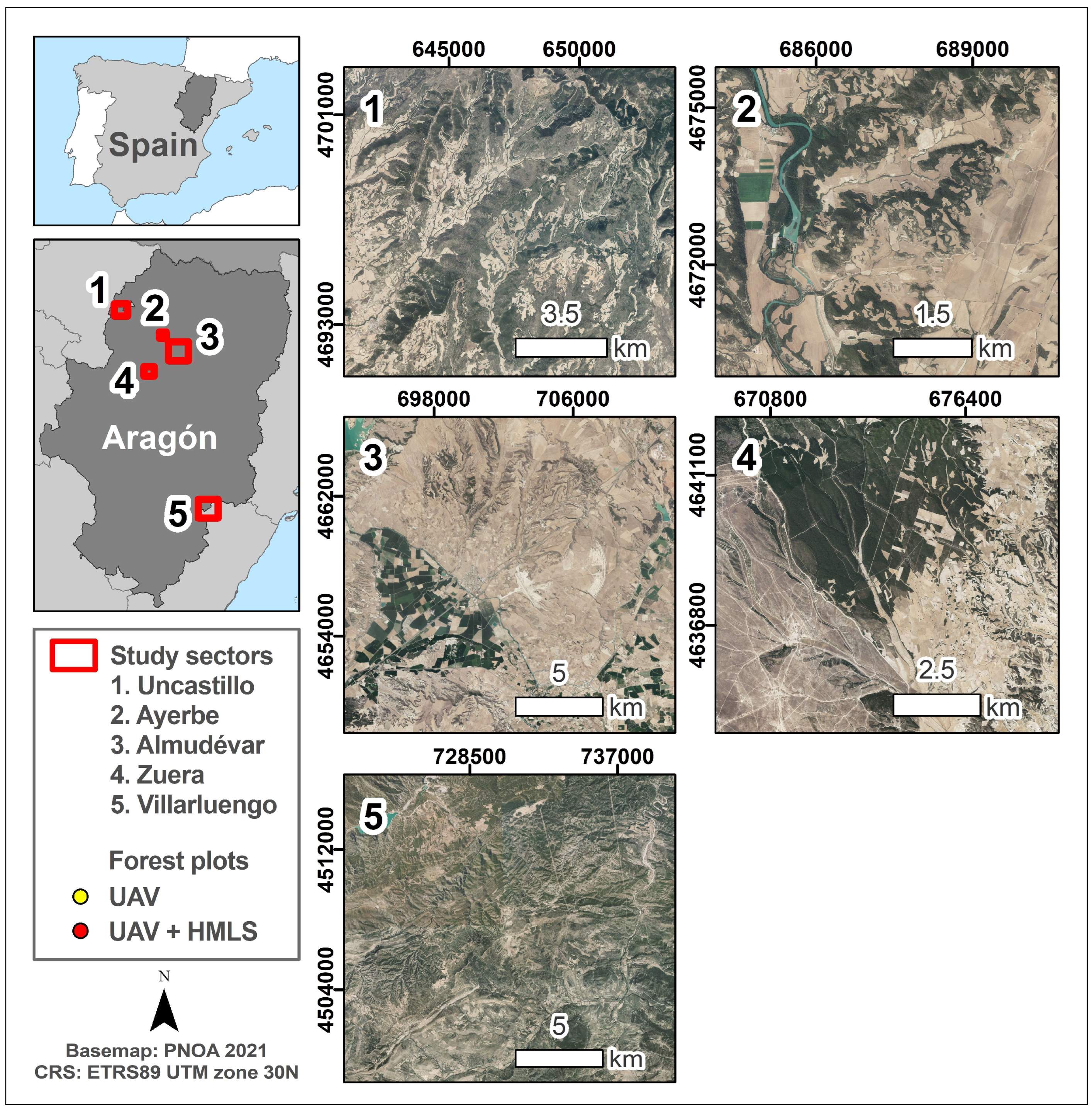
2.1. Study Area
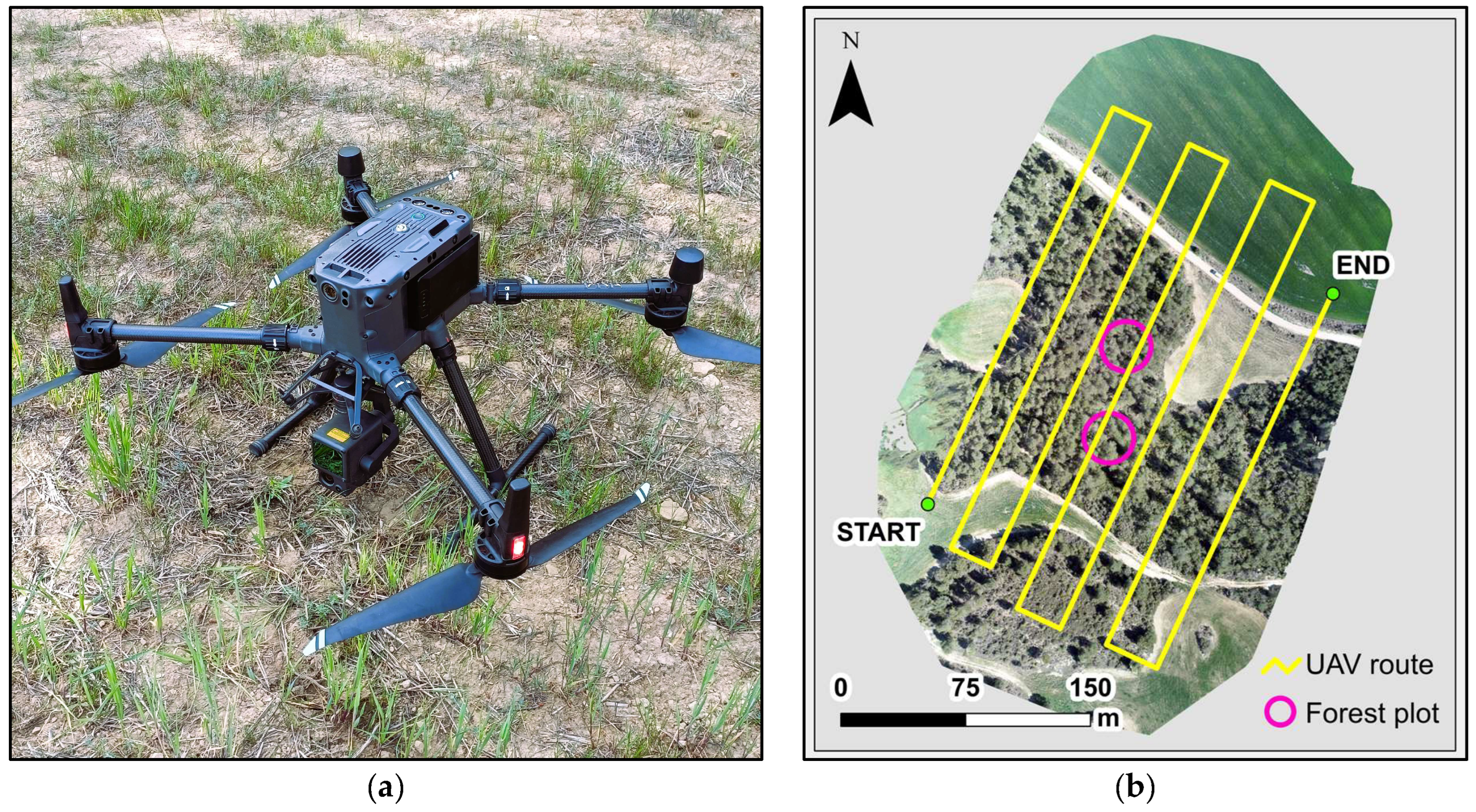
2.2. LiDAR Data Collection and Processing
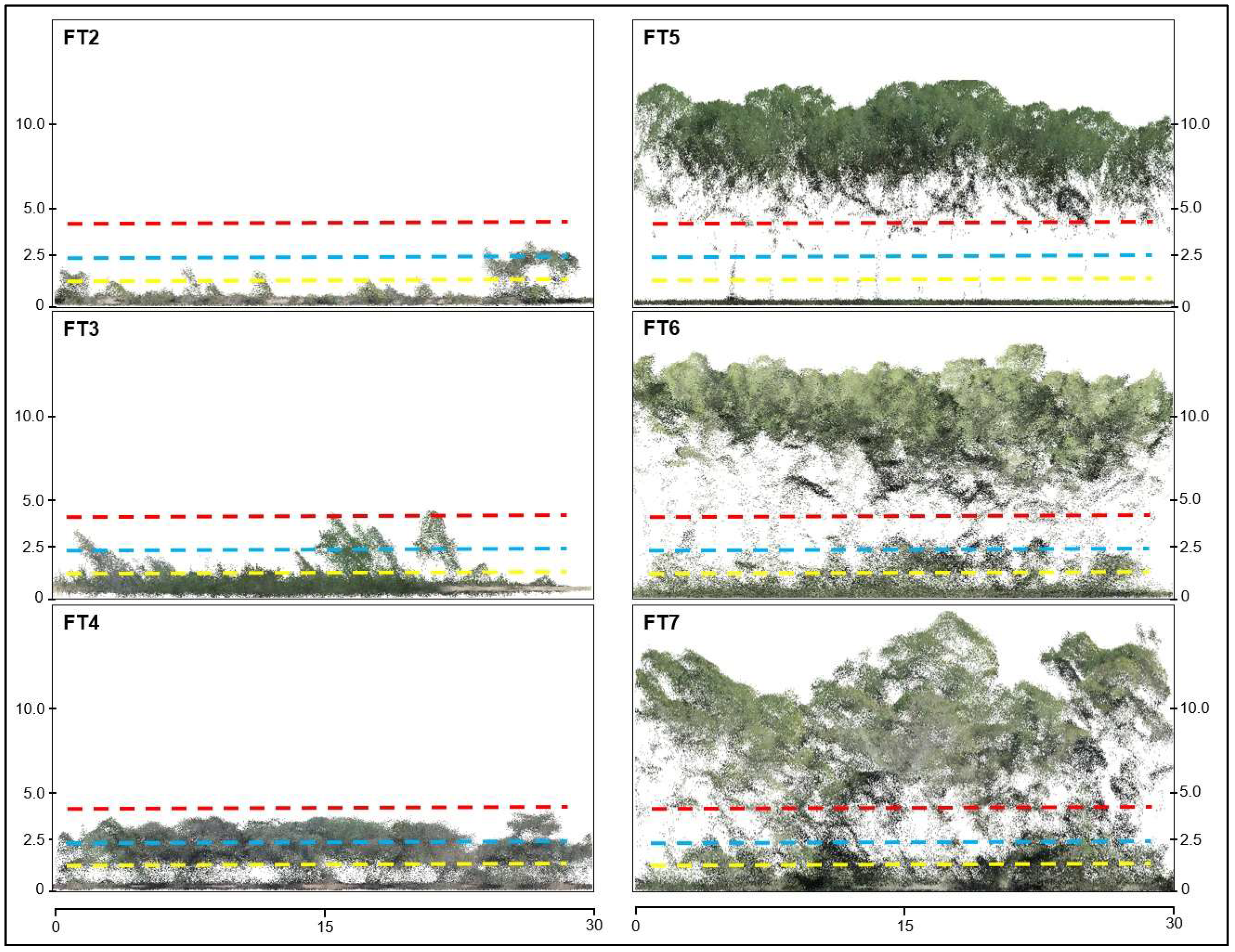
2.3. Variables Selection and Classification of Prometheus Fuel Types
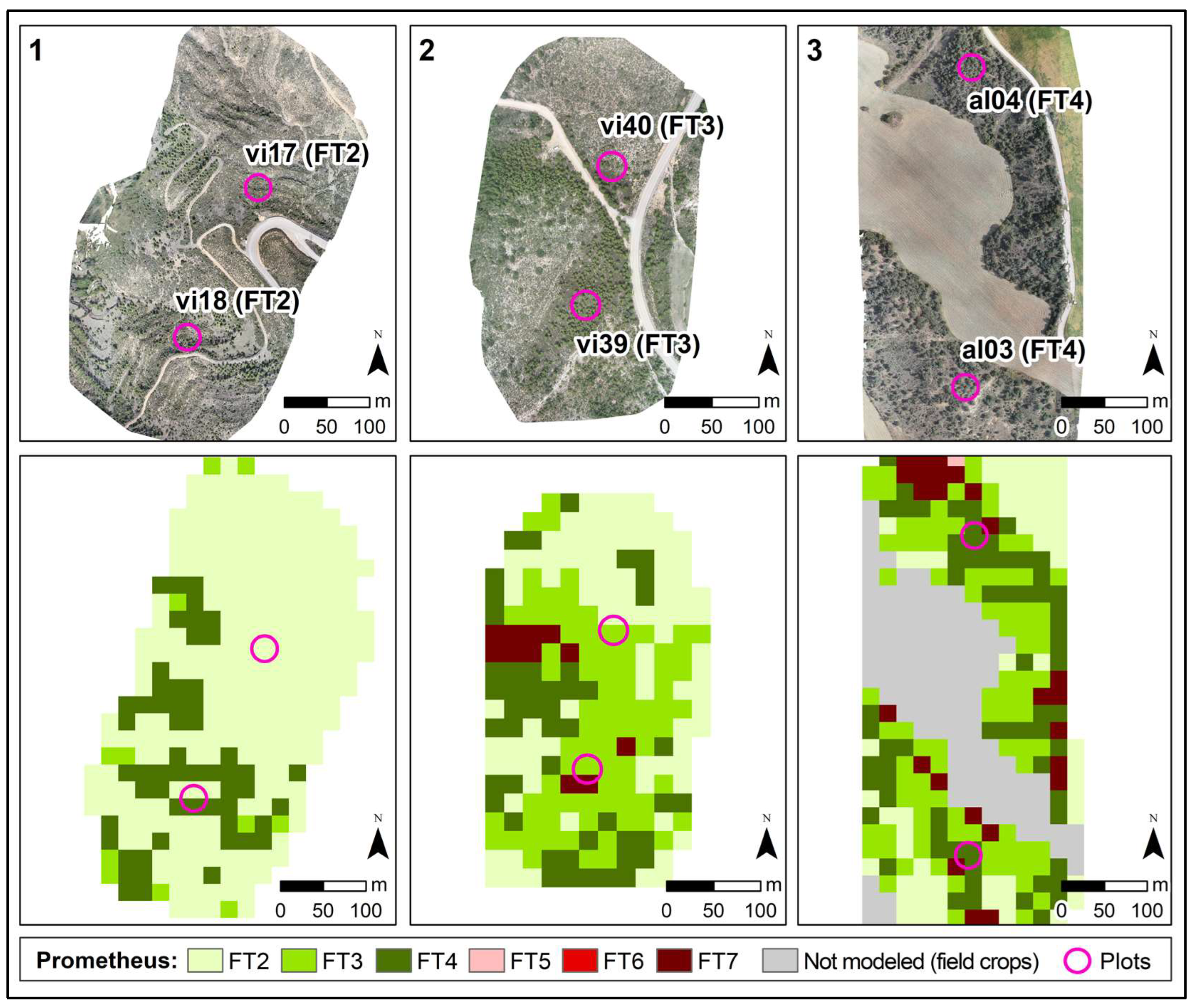
2.4. Spatialization Mapping of the Prometheus Fuel Types Model
3. Results
3.1. Classification of Prometheus Fuel Types Using UAV Data
3.2. Classification of Prometheus Fuel Types Combining UAV and HMLS Data
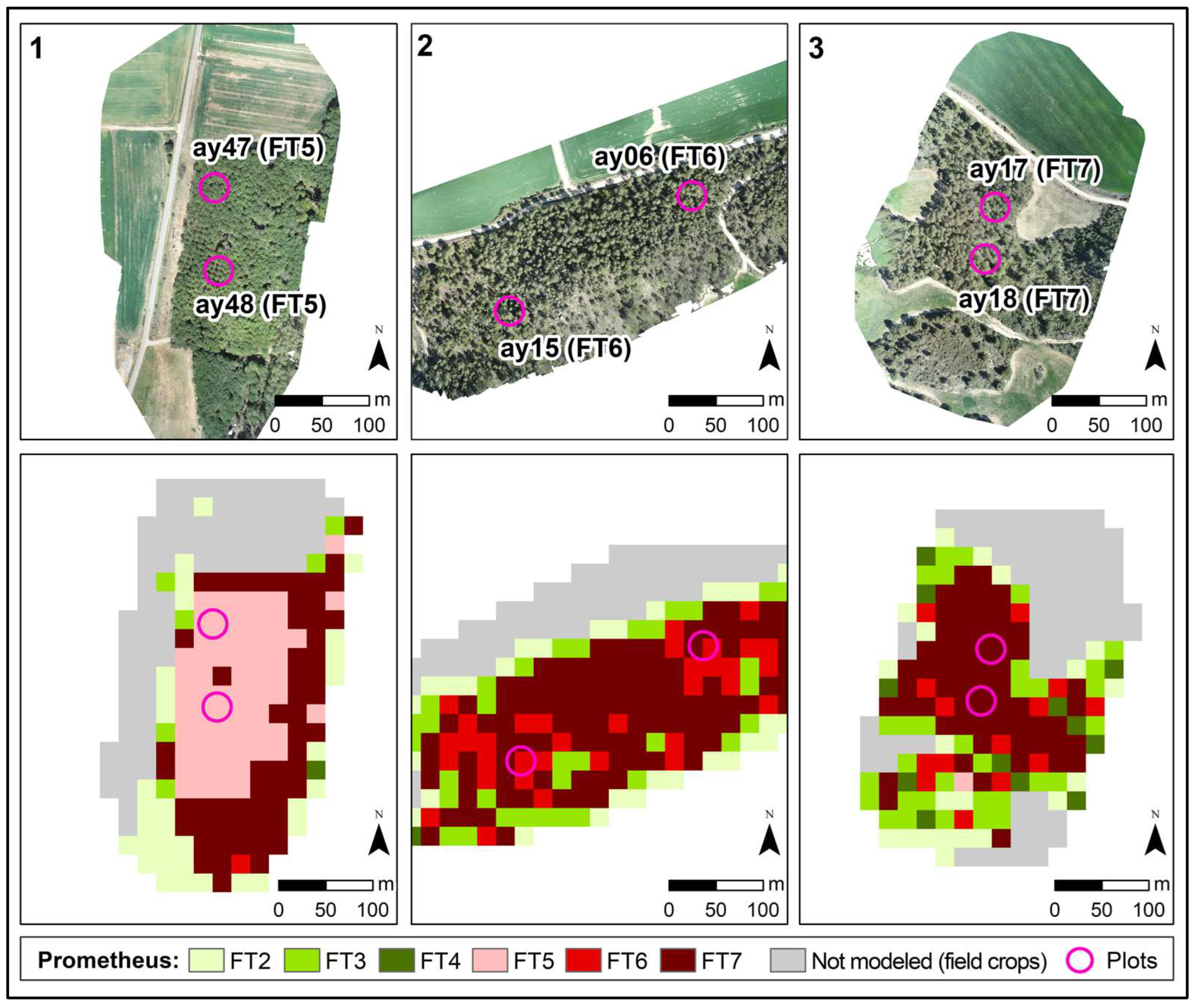
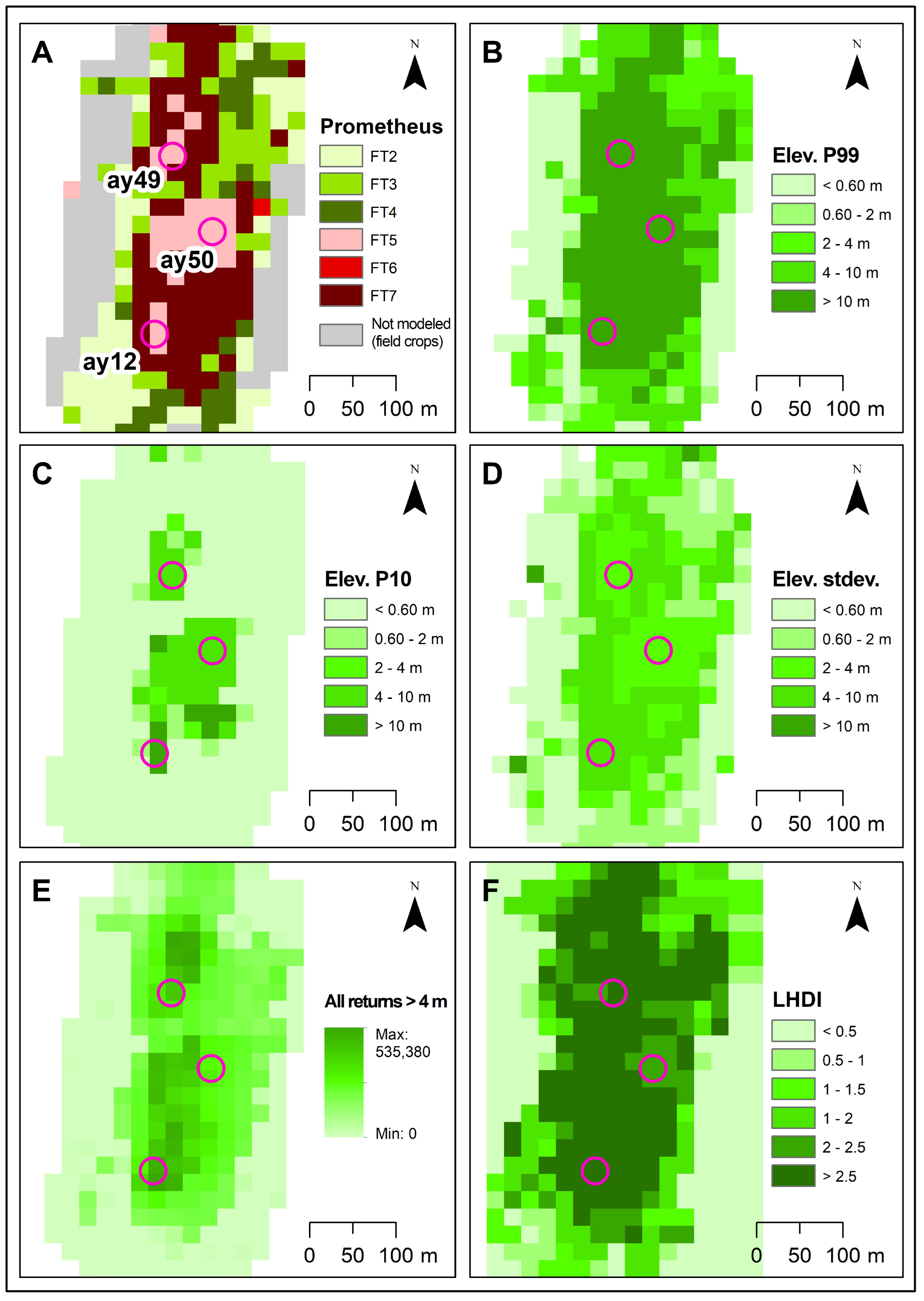
3.3. Mapping of Prometheus Fuel Types
4. Discussion
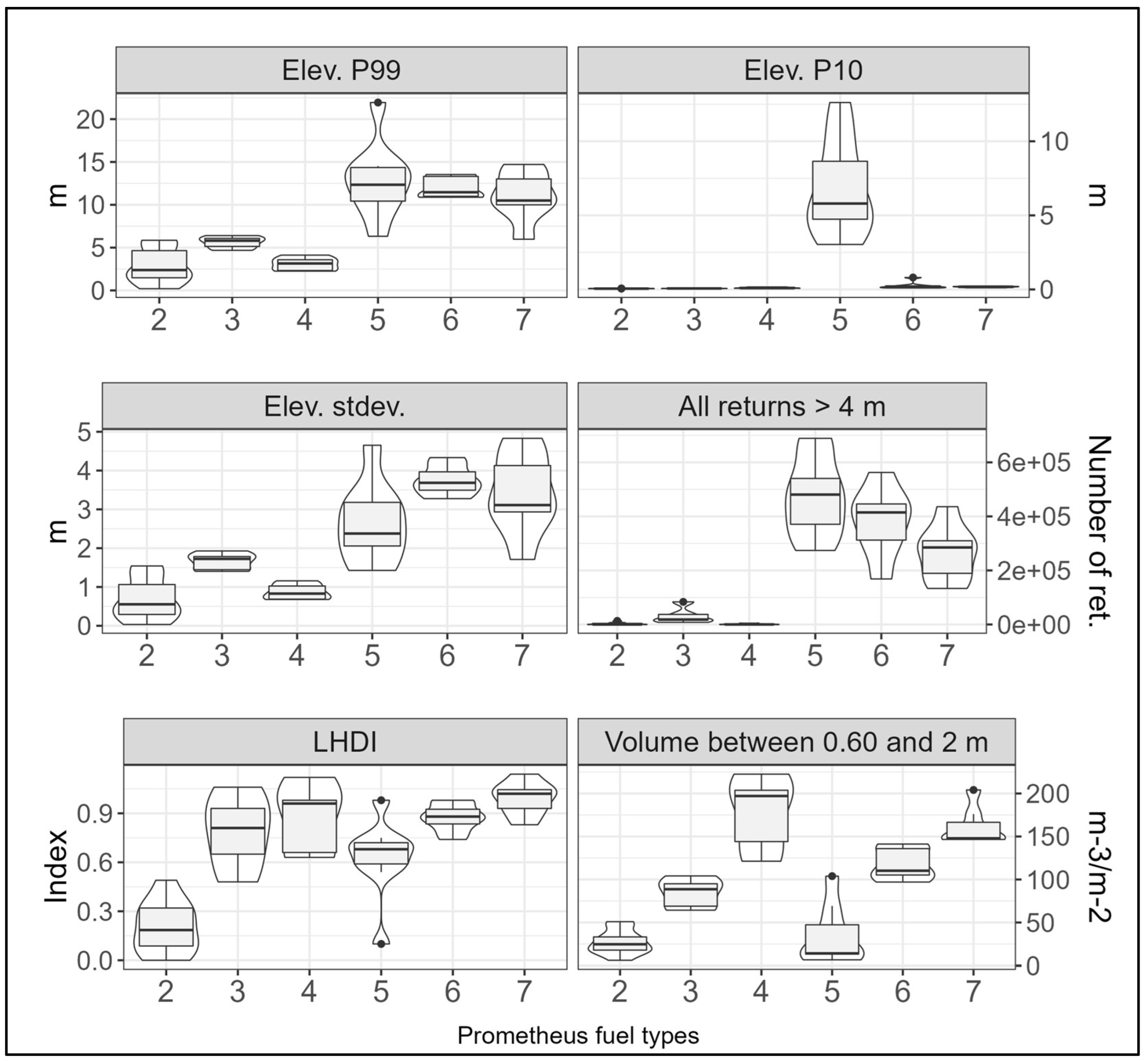
4.1. Adequacy of the Modeled Variables in Identifying the Prometheus Fuel Types
4.2. Capabilities of UAV-LiDAR and HMLS Systems to Classify Prometheus Fuel Types
4.3. Fuels Mapping from UAV Data
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Pausas, J.G.; Keeley, J.E. Wildfires and global change. Front. Ecol. Environ. 2021, 19, 387–395. [Google Scholar] [CrossRef]
- Jones, M.W.; Abatzoglou, J.T.; Veraverbeke, S.; Andela, N.; Lasslop, G.; Forkel, M.; Smith, A.J.P.; Burton, C.; Betts, R.A.; van der Werf, G.; et al. Global and regional trends and drivers of fire under climate change. Rev. Geophys. 2022, 60, e2020RG000726. [Google Scholar] [CrossRef]
- Cunningham, C.X.; Williamson, G.J.; Bowman, D.M.J.S. Increasing frequency and intensity of the most extreme wildfires on Earth. Nat. Ecol. Evol. 2024, 8, 1420–1425. [Google Scholar] [CrossRef] [PubMed]
- Abatzoglou, J.T.; Williams, A.P.; Barbero, R. Global emergence of anthropogenic climate change in fire weather indices. Geophys. Res. Lett. 2019, 46, 326–336. [Google Scholar] [CrossRef]
- Abram, N.J.; Henley, B.J.; Gupta, A.S.; Lippmann, T.J.R.; Clarke, H.; Dowdy, A.J.; Sharples, J.J.; Nolan, R.H.; Zhang, T.; Wooster, M.J.; et al. Connections of climate change and variability to large and extreme forest fires in southeast Australia. Commun. Earth Environ. 2021, 2, 8. [Google Scholar] [CrossRef]
- Ascoli, D.; Moris, J.V.; Marchetti, M.; Sallustio, L. Land use change towards forests and wooded land correlates with large and frequent wildfires in Italy. Ann. Silvic. Res. 2021, 46, 177–188. [Google Scholar] [CrossRef]
- White, A.M.; Long, J.W. Understanding ecological contexts for active reforestation following wildfires. New For. 2019, 50, 41–56. [Google Scholar] [CrossRef]
- Papatheodorou, I.; Kitikidou, K.; Stampoulidis, A.; Milios, E. Analyzing the impact of reforestation on forest fires and the economic outcome in an area in northern Greece: Should we reforest areas with conifers? Yes or no? Ecol. Quest. 2023, 34, 1–17. [Google Scholar] [CrossRef]
- Kramer, H.A.; Mockrin, M.H.; Alexandre, P.M.; Radeloff, V.C. High wildfire damage in interface communities in California. Int. J. Wildland Fire 2019, 28, 641–650. [Google Scholar] [CrossRef]
- Hohner, A.K.; Rhoades, C.C.; Wilkerson, P.; Rosario-Ortiz, F.L. Wildfires alter forest watersheds and threaten drinking water quality. Acc. Chem. Res. 2019, 52, 1234–1244. [Google Scholar] [CrossRef]
- Díaz-Delgado, R.; Lloret, F.; Pons, X.; Terradas, J. Satellite evidence of decreasing resilience in Mediterranean plant communities after recurrent wildfires. Ecology 2002, 83, 2293–2303. [Google Scholar] [CrossRef]
- Kelly, L.T.; Giljohann, K.M.; Duane, A.; Aquilué, N.; Archibald, S.; Batllori, E.; Bennett, A.F.; Buckland, S.T.; Canelles, Q.; Clarke, M.F.; et al. Fire and biodiversity in the Anthropocene. Science 2020, 370, eabb0355. [Google Scholar] [CrossRef] [PubMed]
- Legge, S.; Rumpff, L.; Woinarski, J.C.Z.; Whiterod, N.S.; Ward, M.; Southwell, D.G.; Scheele, B.C.; Nimmo, D.G.; Lintermans, M.; Geyle, H.M.; et al. The conservation impacts of ecological disturbance: Time-bound estimates of population loss and recovery for fauna affected by the 2019–2020 Australian megafires. Glob. Ecol. Biogeogr. 2022, 31, 2085–2104. [Google Scholar] [CrossRef]
- Ponomarev, E.; Yakimov, N.; Ponomareva, T.; Yakubailik, O.; Conrad, S.G. Current trend of carbon emissions from wildfires in Siberia. Atmosphere 2021, 12, 559. [Google Scholar] [CrossRef]
- Phillips, C.A.; Rogers, B.M.; Elder, M.; Cooperdock, S.; Moubarak, M.; Randerson, J.T.; Frumhoff, P.C. Escalating carbon emissions from North American boreal forest wildfires and the climate mitigation potential of fire management. Sci. Adv. 2022, 8, 17. [Google Scholar] [CrossRef]
- Pausas, J.G.; Llovet, J.; Rodrigo, A.; Vallejo, R. Are wildfires a disaster in the Mediterranean basin?—A review. Int. J. Wildland Fire 2008, 17, 713–723. [Google Scholar] [CrossRef]
- Dupuy, J.-L.; Fargeon, H.; Martin-StPaul, N.; Pimont, F.; Ruffault, J.; Guijarro, M.; Hernando, C.; Madrigal, J.; Fernandes, P. Climate change impact on future wildfire danger and activity in southern Europe: A review. Ann. For. Sci. 2020, 77, 35. [Google Scholar] [CrossRef]
- Ruffault, J.; Curt, T.; Moron, V.; Trigo, R.M.; Mouillot, F.; Koutsias, N.; Pimont, F.; Martin-StPaul, N.; Barbero, R.; Dupuy, J.-L.; et al. Increased likelihood of heat-induced large wildfires in the Mediterranean Basin. Sci. Rep. 2020, 10, 13790. [Google Scholar] [CrossRef]
- Richards, J.; Huser, R.; Bevacqua, E.; Zscheischler, J. Insights into the drivers and spatiotemporal trends of extreme Mediterranean wildfires with statistical deep learning. Artif. Intell. Earth Syst. 2023, 2, e220095. [Google Scholar] [CrossRef]
- Lasaponara, R.; Lanorte, A. Remotely sensed characterization of forest fuel types by using satellite ASTER data. Int. J. Appl. Earth. Obs. Geoinf. 2006, 9, 225–234. [Google Scholar] [CrossRef]
- Novo, A.; Fariñas-Álvarez, N.; Martínez-Sánchez, J.; González-Jorge, H.; Fernández-Alonso, J.M.; Lorenzo, H. Mapping forest fire risk—A case of study in Galicia (Spain). Remote Sens. 2020, 12, 3705. [Google Scholar] [CrossRef]
- Aragoneses, E.; Chuvieco, E. Generation and mapping of fuel types for fire risk assessment. Fire 2021, 4, 59. [Google Scholar] [CrossRef]
- Abdollahi, A.; Yebra, M. Forest fuel type classification: Review of remote sensing techniques, constraints and future trends. J. Environ. Manag. 2023, 342, 118315. [Google Scholar] [CrossRef] [PubMed]
- Prometheus. Management Techniques for Optimization of Suppression and Minimization of Wildfires Effects; System Validation, European Commission, DG XII, ENVIR & CLIMATE, Contract Number ENV4-CT98-0716; European Commission: Luxembourg, 1999. [Google Scholar]
- Ashworth, A.; Evans, D.L.; Cookie, W.H.; Londo, A.; Collins, C.; Neuenschwander, A. Predicting southeastern forest canopy heights and fire fuel models using GLAS data. Photogramm. Eng. Remote Sens. 2010, 76, 915–922. [Google Scholar] [CrossRef]
- Leite, R.V.; Silva, C.A.; Broadbent, E.N.; do Amaral, C.H.; Liesenberg, V.; de Almeida, D.R.A.; Mohan, M.; Godinho, S.; Cardil, A.; Hamamura, C.; et al. Large scale multi-layer fuel load characterization in tropical savanna using GEDI spaceborne LiDAR data. Remote Sens. Environ. 2022, 268, 112764. [Google Scholar] [CrossRef]
- Hoffrén, R.; Lamelas, M.T.; de la Riva, J.; Domingo, D.; Montealegre, A.L.; García-Martín, A.; Revilla, S. Assessing GEDI-NASA system for forest fuels classification using machine learning techniques. Int. J. Appl. Earth. Obs. Geoinf. 2023, 116, 103175. [Google Scholar] [CrossRef]
- Chirici, G.; Scotti, R.; Montaghi, A.; Barbati, A.; Cartisano, R.; López, G.; Marchetti, M.; McRoberts, R.E.; Olsson, H.; Corona, P. Stochastic gradient boosting classification trees for forest fuel types mapping through airborne laser scanning and IRS LISS-III imagery. Int. J. Appl. Earth Obs. Geoinf. 2013, 25, 87–97. [Google Scholar] [CrossRef]
- Domingo, D.; de la Riva, J.; Lamelas, M.T.; García-Martín, A.; Ibarra, P.; Echeverría, M.T.; Hoffrén, R. Fuel type classification using airborne laser scanning and Sentinel-2 data in Mediterranean forest affected by wildfires. Remote Sens. 2020, 12, 3660. [Google Scholar] [CrossRef]
- Romero-Ramírez, F.J.; Navarro-Cerrillo, R.M.; Varo-Martínez, M.A.; Quero, J.L.; Doerr, S.; Hernández-Clemente, R. Determination of forest fuels characteristics in mortality-affected Pinus forests using integrated hyperspectral and ALS data. Int. J. Appl. Earth. Obs. Geoinf. 2018, 68, 157–167. [Google Scholar] [CrossRef]
- Shin, P.; Sankey, T.; Moore, M.M.; Thode, A.E. Evaluating unmanned aerial vehicle images for estimating forest canopy fuels in a Ponderosa pine stand. Remote Sens. 2018, 10, 1266. [Google Scholar] [CrossRef]
- Hoffrén, R.; Lamelas, M.T.; de la Riva, J. UAV-derived photogrammetric point clouds and multispectral indices for fuel estimation in Mediterranean forests. Remote Sens. Appl. Soc. Environ. 2023, 31, 100997. [Google Scholar] [CrossRef]
- Hillman, S.; Wallace, L.; Lucieer, A.; Reinke, K.; Turner, D.; Jones, S. A comparison of terrestrial and UAS sensors for measuring fuel hazard in a dry sclerophyll forest. Int. J. Appl. Earth Obs. Geoinf. 2021, 95, 102261. [Google Scholar] [CrossRef]
- Hyyppä, E.; Yu, X.; Kaartinen, H.; Hakala, T.; Kukko, A.; Vastaranta, M.; Hyyppä, J. Comparison of backpack, handheld, under-canopy UAV, and above-canopy UAV laser scanning for field reference data collection in boreal forests. Remote Sens. 2020, 12, 3327. [Google Scholar] [CrossRef]
- Chen, Y.; Zhu, X.; Yebra, M.; Harris, S.; Tapper, N. Strata-based forest fuel classification for wild fire hazard assessment using terrestrial LiDAR. J. Appl. Remote Sens. 2016, 10, 046025. [Google Scholar] [CrossRef]
- Wilson, N.; Bradstock, R.; Bedward, M. Influence of fuel structure derived from terrestrial laser scanning (TLS) on wildfire severity in logged forests. J. Environ. Manag. 2022, 302 Pt A, 114011. [Google Scholar] [CrossRef]
- Hyyppä, E.; Hyyppä, J.; Hakala, T.; Kukko, A.; Wulder, M.A.; White, J.C.; Pyöräla, J.; Yu, X.; Wang, Y.; Virtanen, J.P.; et al. Under-canopy UAV laser scanning for accurate forest field measurements. ISPRS J. Photogramm. Remote Sens. 2020, 164, 41–60. [Google Scholar] [CrossRef]
- Hoffrén, R.; Lamelas, M.T.; de la Riva, J. Evaluation of handheld mobile laser scanner systems for the definition of fuel types in structurally complex Mediterranean forest stands. Fire 2024, 7, 59. [Google Scholar] [CrossRef]
- Amatulli, G.; Pérez-Cabello, F.; de la Riva, J. Mapping lightning/human-caused wildfires occurrence under ignition point location uncertainty. Ecol. Modell. 2007, 200, 321–333. [Google Scholar] [CrossRef]
- Loidi, J. (Ed.) The Ebro Basin. In The Vegetation of the Iberian Peninsula. Plant and Vegetation; Springer: Cham, Switzerland, 2017; Volume 12, pp. 513–547. [Google Scholar]
- Evans, J.S.; Hudak, A.T. A multiscale curvature algorithm for classifying discrete return LiDAR in forested environments. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1029–1038. [Google Scholar] [CrossRef]
- Montealegre, A.L.; Lamelas, M.T.; de la Riva, J.; García-Martín, A.; Escribano, F. A comparison of open-source LiDAR filtering algorithms in a Mediterranean forest environment. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 4072–4085. [Google Scholar] [CrossRef]
- Renslow, M. Manual of Airborne Topographic LiDAR; ASPRS: Bethesda, MD, USA, 2013; ISBN 978-1570830976. [Google Scholar]
- Roussel, J.R.; Auty, D.; Coops, N.C.; Tompalski, P.; Goodboy, T.R.H.; Sánchez-Meador, A.; Bourdon, J.F.; de Boissieu, F.; Achim, A. ‘lidR’: An R package for analysis of Airborne Laser Scanning (ALS) data. Remote Sens. Environ. 2020, 251, 112061. [Google Scholar] [CrossRef]
- Roussel, J.R.; Auty, D. Airborne LiDAR Data Manipulation and Visualization for Forestry Applications. R Package Version 4.0.1. 2022. Available online: https://cran.r-project.org/package=lidR (accessed on 13 June 2024).
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2020; Available online: https://www.R-project.org (accessed on 13 June 2024).
- McGaughey, R.J. FUSION/LDV: Software for LiDAR Data Analysis and Visualization v.4.21; USDA Forest Service: Washington, DC, USA, 2021. [Google Scholar]
- Listopad, C.M.C.S.; Masters, R.E.; Drake, J.; Weishampel, J.; Branquinho, C. Structural diversity indices based on airborne LiDAR as ecological indicators for managing highly dynamic landscapes. Ecol. Indic. 2015, 57, 268–279. [Google Scholar] [CrossRef]
- García-Cimarras, A.; Manzanera, J.A.; Valbuena, R. Analysis of Mediterranean vegetation fuel type changes using multitemporal LiDAR. Forests 2021, 12, 335. [Google Scholar] [CrossRef]
- García, M.; Riaño, D.; Chuvieco, E.; Salas, J.; Danson, F.M. Multispectral and LiDAR data fusion for fuel type mapping using Support Vector Machine and decision rules. Remote Sens. Environ. 2011, 115, 1369–1379. [Google Scholar] [CrossRef]
- Dunn, O.J. Multiple comparisons using rank sums. Technometrics 1964, 6, 241–252. [Google Scholar] [CrossRef]
- Kuhn, M. Building predictive models in R using the caret package. J. Stat. Softw. 2008, 28, 1–26. [Google Scholar] [CrossRef]
- Andersen, H.E.; McGaughey, R.J.; Reutebuch, S.E. Estimating forest canopy fuel parameters using LiDAR data. Remote Sens. Environ. 2005, 94, 441–449. [Google Scholar] [CrossRef]
- Nicolau, A.P.; Dyson, K.; Saah, D.; Clinton, N. Accuracy assessment: Quantifying classification quality. In Cloud-Based Remote Sensing with Google Earth Engine; Cardille, J.A., Crowley, M.A., Saah, D., Clinton, N.E., Eds.; Springer: Cham, Switzerland, 2023; pp. 135–145. [Google Scholar] [CrossRef]
- Hijmans, R. ‘terra’: Spatial Data Analysis. R Package Version 1.5-21. 2022. Available online: https://cran.r-project.org/package=terra (accessed on 13 June 2024).
- Birot, Y. Living with Wildfires: What Science Can Tell Us; Discussion Paper 15; European Forest Institute: Joensuu, Finland, 2009; ISBN 987-952-5453-29-4. [Google Scholar]
- Varol, T.; Emir, T.; Akgul, M.; Ozel, H.B.; Acar, H.H.; Cetin, M. Impacts of small-scale mechanized logging equipment on soil compaction in forests. J. Soil Sci. Plant Nutr. 2020, 20, 953–963. [Google Scholar] [CrossRef]
- García-Galar, A.; Lamelas, M.T.; Domingo, D. Assessment of oak groves conservation statuses in Natura 2000 sacs with single photon LiDAR and Sentinel-2 data. Remote Sens. 2023, 15, 710. [Google Scholar] [CrossRef]
- Jakubowksi, M.K.; Guo, Q.; Collins, B.; Stephens, S.; Kelly, M. Predicting surface fuel models and fuel metrics using LiDAR and CIR imagery in dense, mountainous forest. Photogramm. Eng. Remote Sens. 2013, 1, 37–49. [Google Scholar] [CrossRef]
- Revilla, S.; Lamelas, M.T.; Domingo, D.; de la Riva, J.; Montorio, R.; Montealegre, A.L.; García-Martín, A. Assessing the potential of the DART model to discrete return LiDAR simulation—Application to fuel type mapping. Remote Sens. 2021, 13, 342. [Google Scholar] [CrossRef]
- Gelabert, P.J.; Montealegre, A.L.; Lamelas, M.T.; Domingo, D. Forest structural diversity characterization in Mediterranean landscapes affected by fires using Airborne Laser Scanning data. GIScience Remote Sens. 2020, 57, 497–509. [Google Scholar] [CrossRef]
- Azim, M.R.; Keskin, M.; Do, N.; Gül, M. Automated classification of fuel types using roadside images via deep learning. Int. J. Wildland Fire 2022, 31, 982–987. [Google Scholar] [CrossRef]
- Labenski, P.; Ewald, M.; Schmidtlein, S.; Fassnacht, F.E. Classifying surface fuel types based on forest stand photographs and satellite time series using deep learning. Int. J. Appl. Earth Obs. Geoinf. 2022, 109, 102799. [Google Scholar] [CrossRef]
- Alipour, M.; La Puma, I.; Picotte, J.; Shamsaei, K.; Rowell, E.; Watts, A.; Kosovic, B.; Ebrahimian, H.; Tacirogl, E. A multimodal data fusion and deep learning framework for large-scale wildfire surface fuel mapping. Fire 2023, 6, 36. [Google Scholar] [CrossRef]
- Carbone, A.; Spiller, D.; Laneve, G. Fuel type mapping using a CNN-based remote sensing approach: A case study in Sardinia. Fire 2023, 6, 395. [Google Scholar] [CrossRef]
- Wallace, L.; Lucieer, A.; Malenovský, Z.; Turner, D.; Vopěnka, P. Assessment of forest structure using two UAV techniques: A comparison of airborne laser scanning and Structure from Motion (SfM) point clouds. Forests 2016, 7, 62. [Google Scholar] [CrossRef]
- Marino, E.; Ranz, P.; Tomé, J.L.; Noriega, M.Á.; Esteban, J.; Madrigal, J. Generation of high-resolution fuel model maps from discrete airborne laser scanner and Landsat-8 OLI: A low-cost and highly updated methodology for large areas. Remote Sens. Environ. 2016, 187, 267–280. [Google Scholar] [CrossRef]
- Huesca, M.; Riaño, D.; Ustin, S.L. Spectral mapping methods applied to LiDAR data: Application to fuel type mapping. Int. J. Appl. Earth Obs. Geoinf. 2019, 74, 159–168. [Google Scholar] [CrossRef]
- Qi, Y.; Coops, N.C.; Daniels, L.D.; Butson, C.R. Assessing the effects of burn severity on post-fire tree structures using the fused drone and mobile laser scanning point clouds. Front. Environ. Sci. 2022, 10, 949442. [Google Scholar] [CrossRef]
- Levick, S.R.; Whiteside, T.; Loewensteiner, D.A.; Rudge, M.; Bartolo, R. Leveraging TLS as a calibration and validation tool for MLS and ULS mapping of savanna structure and biomass at landscape-scales. Remote Sens. 2021, 13, 257. [Google Scholar] [CrossRef]
- Arellano-Pérez, S.; Castedo-Dorado, F.; López-Sánchez, C.A.; González-Ferreiro, E.; Yang, Z.; Díaz-Varela, R.A.; Álvarez-González, J.G.; Vega, J.A.; Ruiz-González, A.D. Potential of Sentinel-2 data to model surface and canopy fuel characteristics in relation to crown fire hazard. Remote Sens. 2018, 10, 1645. [Google Scholar] [CrossRef]
- Hu, Y.; Xu, X.; Wu, F.; Sun, Z.; Xia, H.; Meng, Q.; Huang, W.; Zhou, H.; Gao, J.; Li, W.; et al. Estimating forest stock volume in Hunan Province, China, by integrating in situ plot data, Sentinel-2 images, and linear and machine learning regression models. Remote Sens. 2020, 12, 186. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fuel Type | Cover | Shrub Mean Height | UAV Plots | UAV and HMLS Plots |
|---|---|---|---|---|
| FT2 | >60% grass and <50% trees (>4 m) | 0.30–0.60 m | 11 | 10 |
| FT3 | 0.60–2.00 m | 7 | 5 | |
| FT4 | 2.00–4.00 m | 5 | 5 | |
| FT5 | <30% shrub and >50% trees (>4 m) | 14 | 9 | |
| FT6 | >30% shrub and >50% trees (>4 m) | 12 | 7 | |
| FT7 | 24 | 7 |
| Variables | Model | OA |
|---|---|---|
| Elev. P99, Elev. P10, Elev. stdev., All returns > 4 m, LHDI | RF | 81.28% |
| SVM-L | 75.10% | |
| SVM-R | 78.32% |
| Fuel Types | Predicted | Prod.’s Accuracy | ||||||
|---|---|---|---|---|---|---|---|---|
| FT2 | FT3 | FT4 | FT5 | FT6 | FT7 | |||
| Actual | FT2 | 99 | 20 | 0 | 0 | 0 | 0 | 83.19% |
| FT3 | 10 | 42 | 0 | 10 | 0 | 8 | 60.00% | |
| FT4 | 1 | 0 | 50 | 0 | 0 | 0 | 98.04% | |
| FT5 | 0 | 0 | 0 | 120 | 0 | 10 | 92.31% | |
| FT6 | 0 | 0 | 0 | 0 | 91 | 31 | 74.59% | |
| FT7 | 0 | 8 | 0 | 10 | 29 | 191 | 80.25% | |
| User’s accuracy | 90.00% | 60.00% | 100.00% | 85.71% | 75.83% | 79.58% | ||
| FT2 | FT3 | FT4 | FT5 | FT6 | FT7 | |
|---|---|---|---|---|---|---|
| F | 0.87 | 0.57 | 1.00 | 0.89 | 0.69 | 0.74 |
| Variables | RF | SVM-L | SVM-R | |
|---|---|---|---|---|
| UAV | HMLS | OA | OA | OA |
| Elev. P99, Elev. P10, Elev. stdev., All returns > 4 m, LHDI | Volume < 0.60 m | 83.83% | 80.65% | 81.00% |
| Volume 0.60–2 m | 95.05% | 81.73% | 86.17% | |
| Volume 2–4 m | 83.76% | 79.90% | 85.85% | |
| Volume > 4 m | 82.50% | 81.27% | 82.15% | |
| Fuel Type | Predicted | Prod.’s Accuracy | ||||||
|---|---|---|---|---|---|---|---|---|
| FT2 | FT3 | FT4 | FT5 | FT6 | FT7 | |||
| Actual | FT2 | 90 | 10 | 0 | 0 | 0 | 0 | 90.00% |
| FT3 | 10 | 40 | 0 | 0 | 0 | 0 | 80.00% | |
| FT4 | 0 | 0 | 50 | 0 | 0 | 0 | 100.00% | |
| FT5 | 0 | 0 | 0 | 90 | 0 | 0 | 100.00% | |
| FT6 | 0 | 0 | 0 | 0 | 70 | 0 | 100.00% | |
| FT7 | 0 | 0 | 0 | 0 | 0 | 70 | 100.00% | |
| User’s accuracy | 90.00% | 80.00% | 100.00% | 100.00% | 100.00% | 100.00% | ||
| FT2 | FT3 | FT4 | FT5 | FT6 | FT7 | |
|---|---|---|---|---|---|---|
| F | 0.90 | 0.80 | 1.00 | 1.00 | 1.00 | 1.00 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hoffrén, R.; Lamelas, M.T.; de la Riva, J. Classification and Mapping of Fuels in Mediterranean Forest Landscapes Using a UAV-LiDAR System and Integration Possibilities with Handheld Mobile Laser Scanner Systems. Remote Sens. 2024, 16, 3536. https://doi.org/10.3390/rs16183536
Hoffrén R, Lamelas MT, de la Riva J. Classification and Mapping of Fuels in Mediterranean Forest Landscapes Using a UAV-LiDAR System and Integration Possibilities with Handheld Mobile Laser Scanner Systems. Remote Sensing. 2024; 16(18):3536. https://doi.org/10.3390/rs16183536
Chicago/Turabian StyleHoffrén, Raúl, María Teresa Lamelas, and Juan de la Riva. 2024. "Classification and Mapping of Fuels in Mediterranean Forest Landscapes Using a UAV-LiDAR System and Integration Possibilities with Handheld Mobile Laser Scanner Systems" Remote Sensing 16, no. 18: 3536. https://doi.org/10.3390/rs16183536
APA StyleHoffrén, R., Lamelas, M. T., & de la Riva, J. (2024). Classification and Mapping of Fuels in Mediterranean Forest Landscapes Using a UAV-LiDAR System and Integration Possibilities with Handheld Mobile Laser Scanner Systems. Remote Sensing, 16(18), 3536. https://doi.org/10.3390/rs16183536