
GNSS-IR Soil Moisture Retrieval Using Multi-Satellite Data Fusion Based on Random Forest


 , , , and
, , , and
Abstract
1. Introduction
2. Methodology
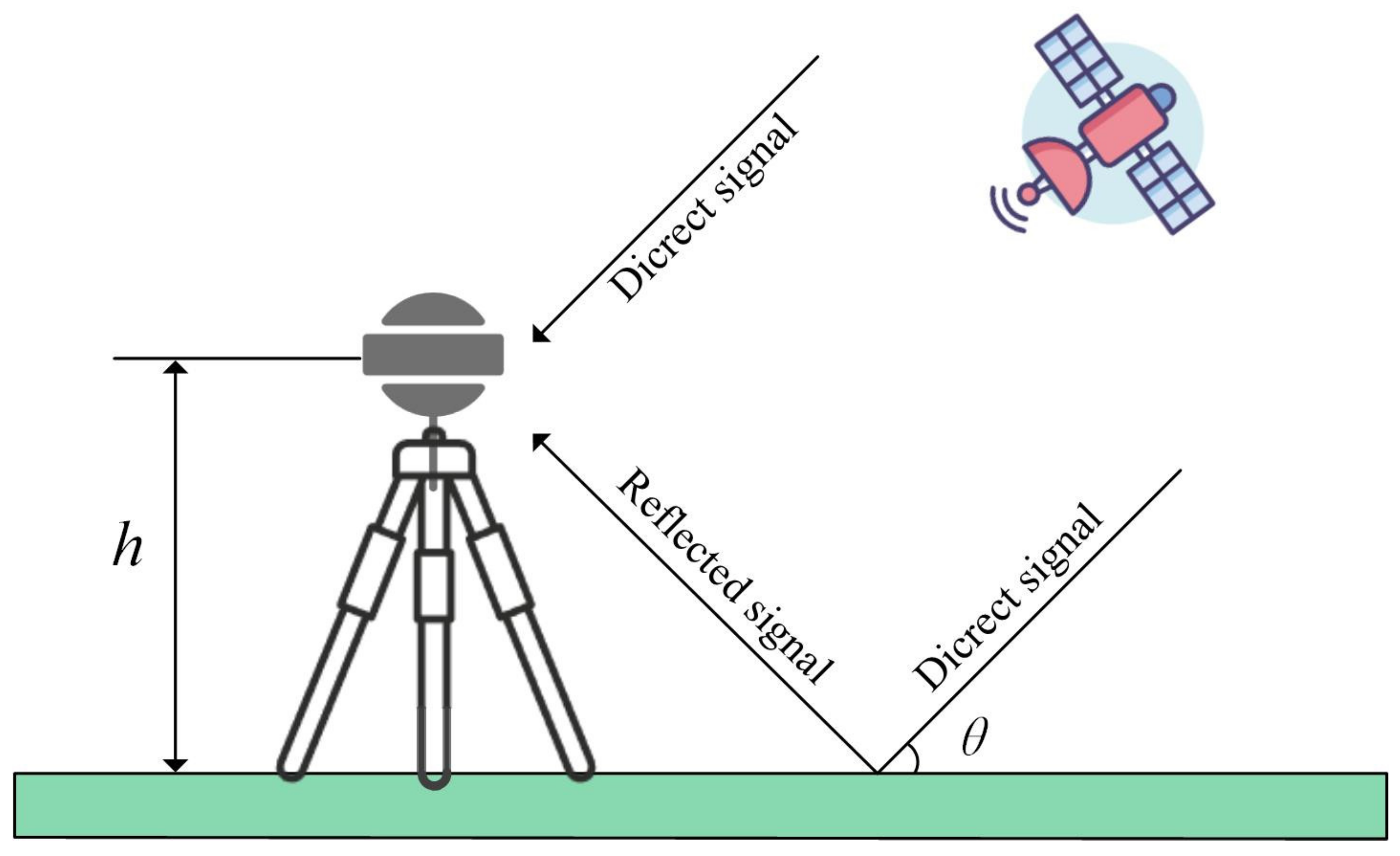
2.1. GNSS-IR Soil Moisture-Detection Principle
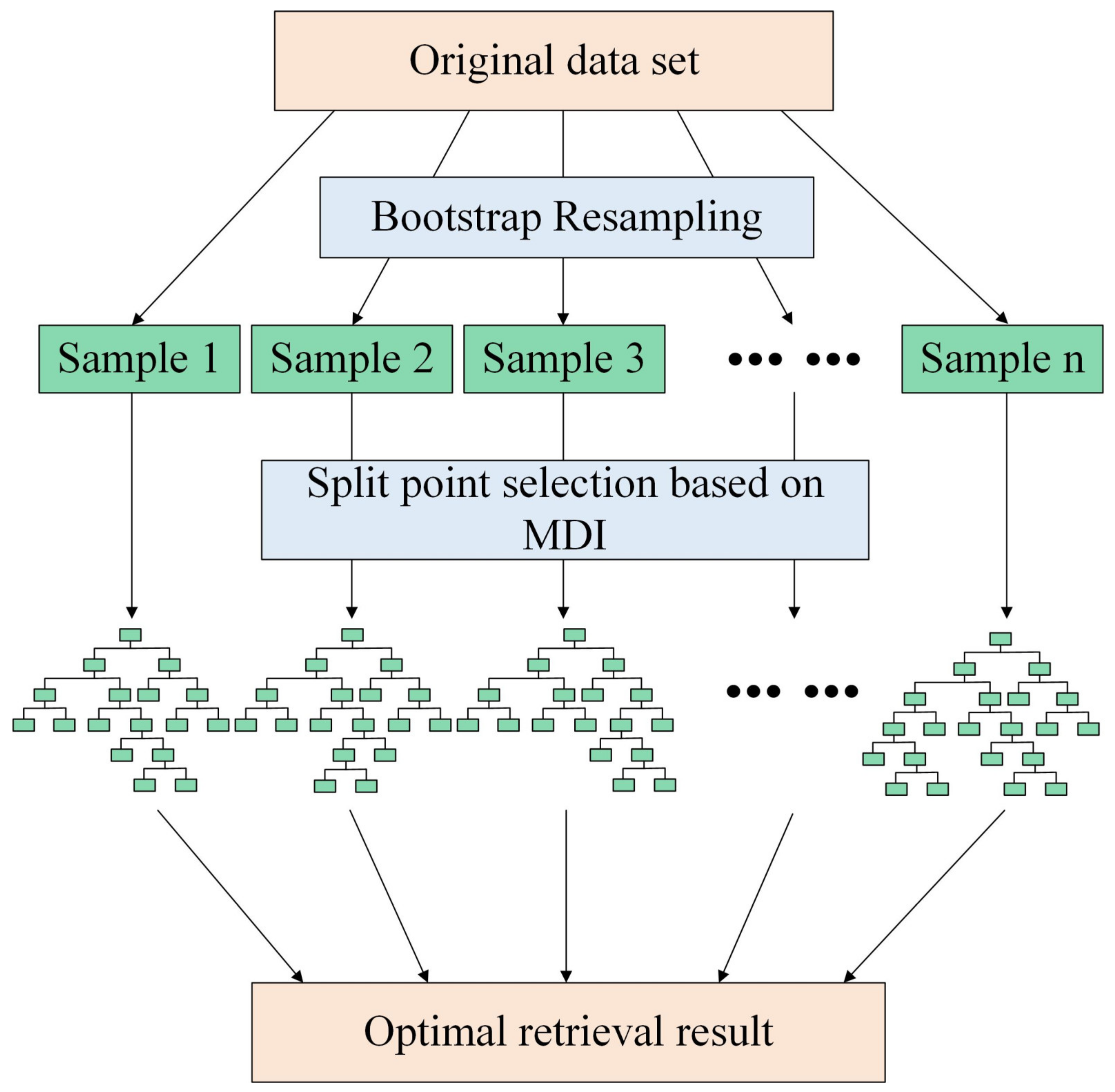
2.2. Principles of MDI-Based Random Forest Retrieval
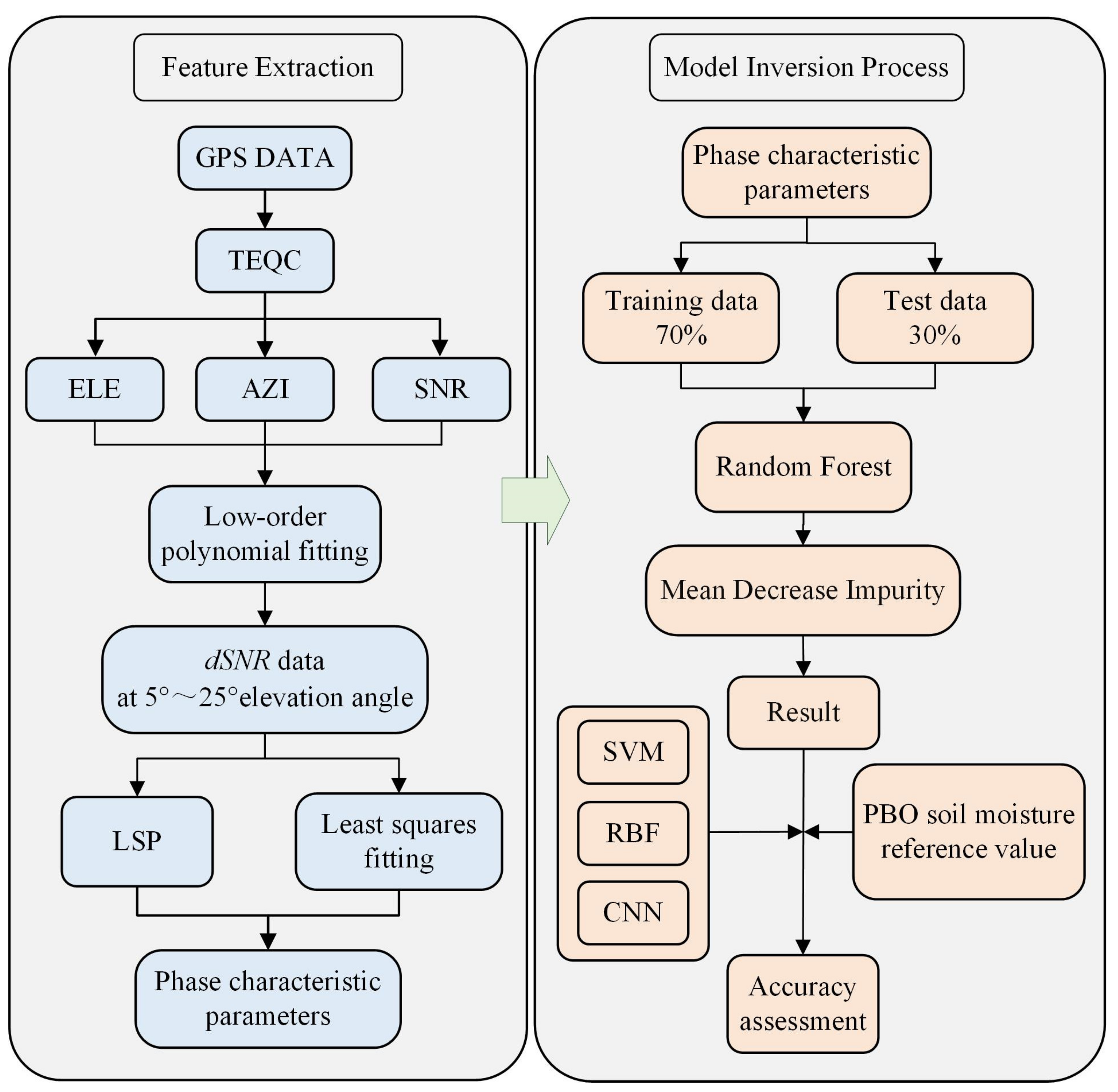
2.3. Experimental Technical Scheme
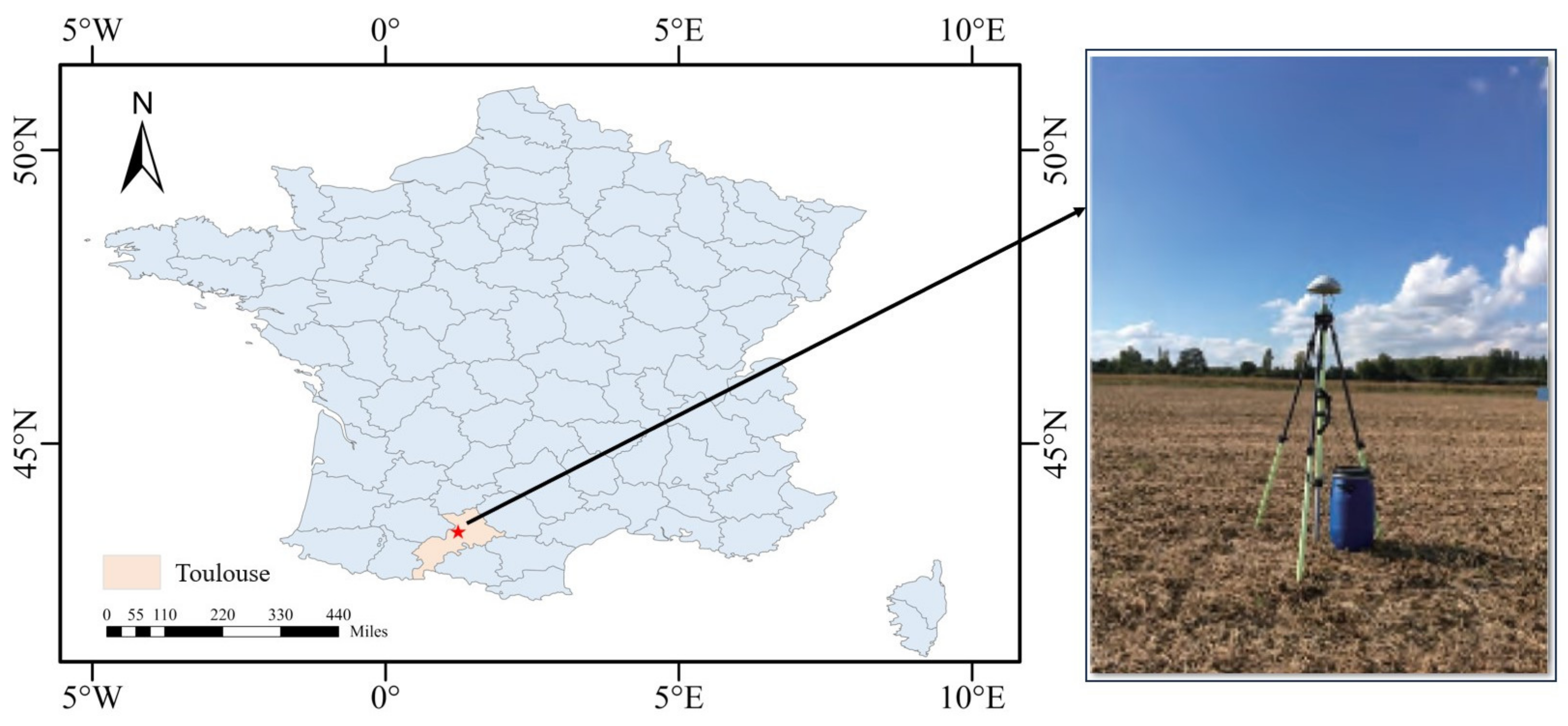
3. Overview of the Study Area
4. Results
4.1. Experimental Methods and Results
- Construction of the Random Forest Regression Model
- 2.
- Model Training
- 3.
- Model Validation
4.2. Accuracy Analysis of Different Model Retrieval Results
5. Discussion
5.1. Reliability Analysis of MDI Algorithms
5.2. Performance Analysis of the RF Model Based on the MDI Algorithm
5.3. Analysis of the Impact of Terrain on Soil Moisture Retrieval
6. Conclusions
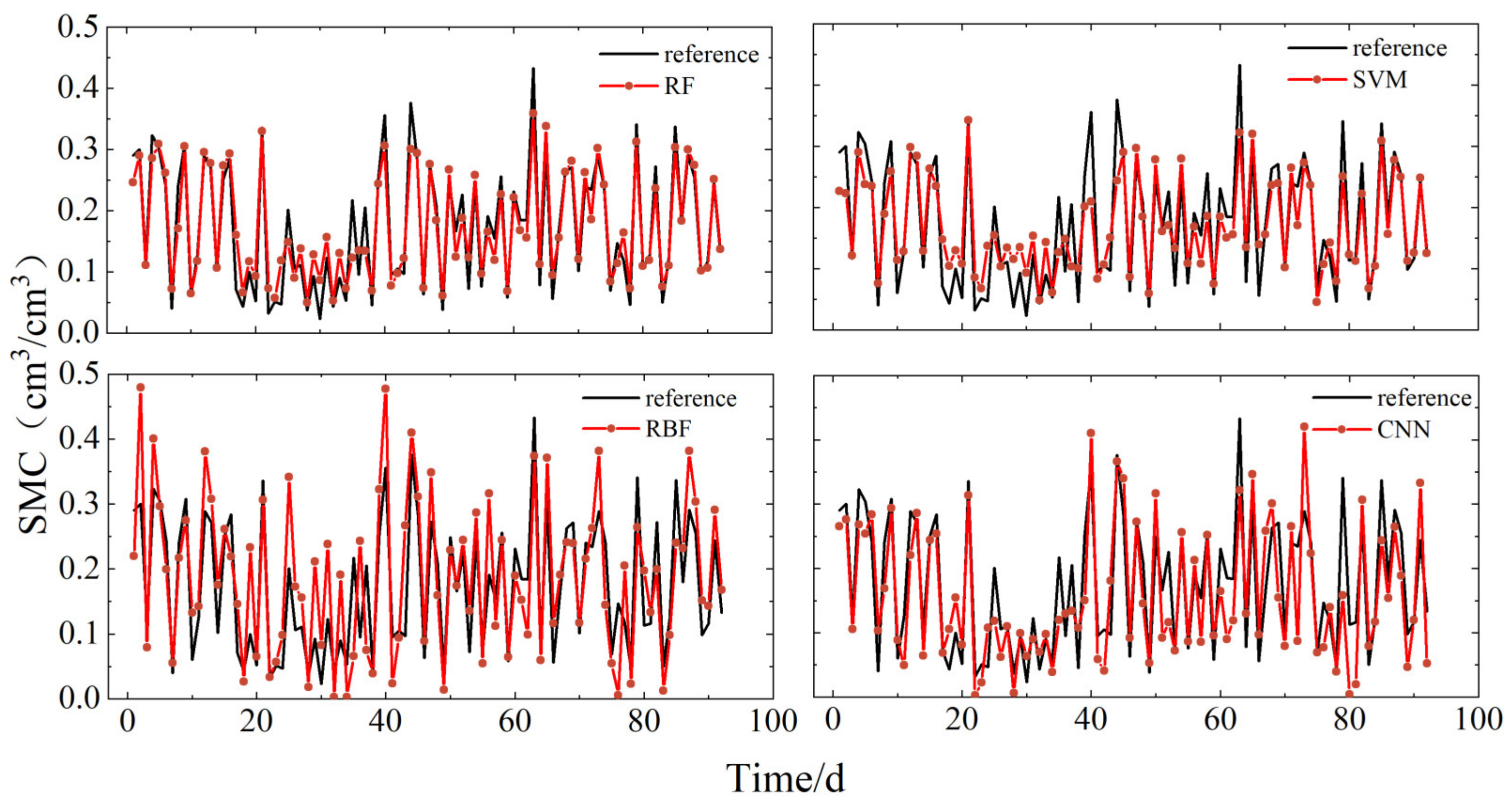
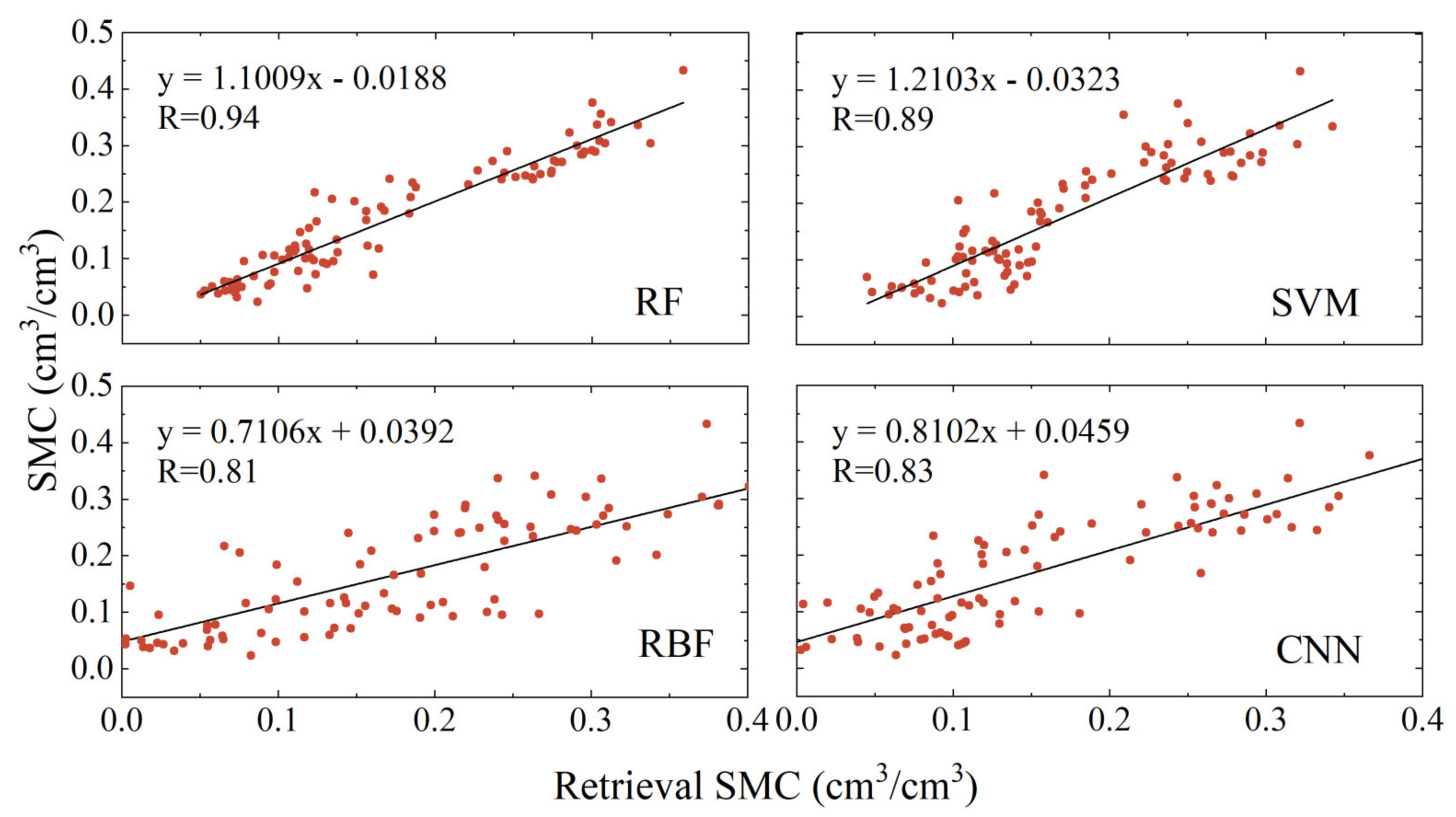
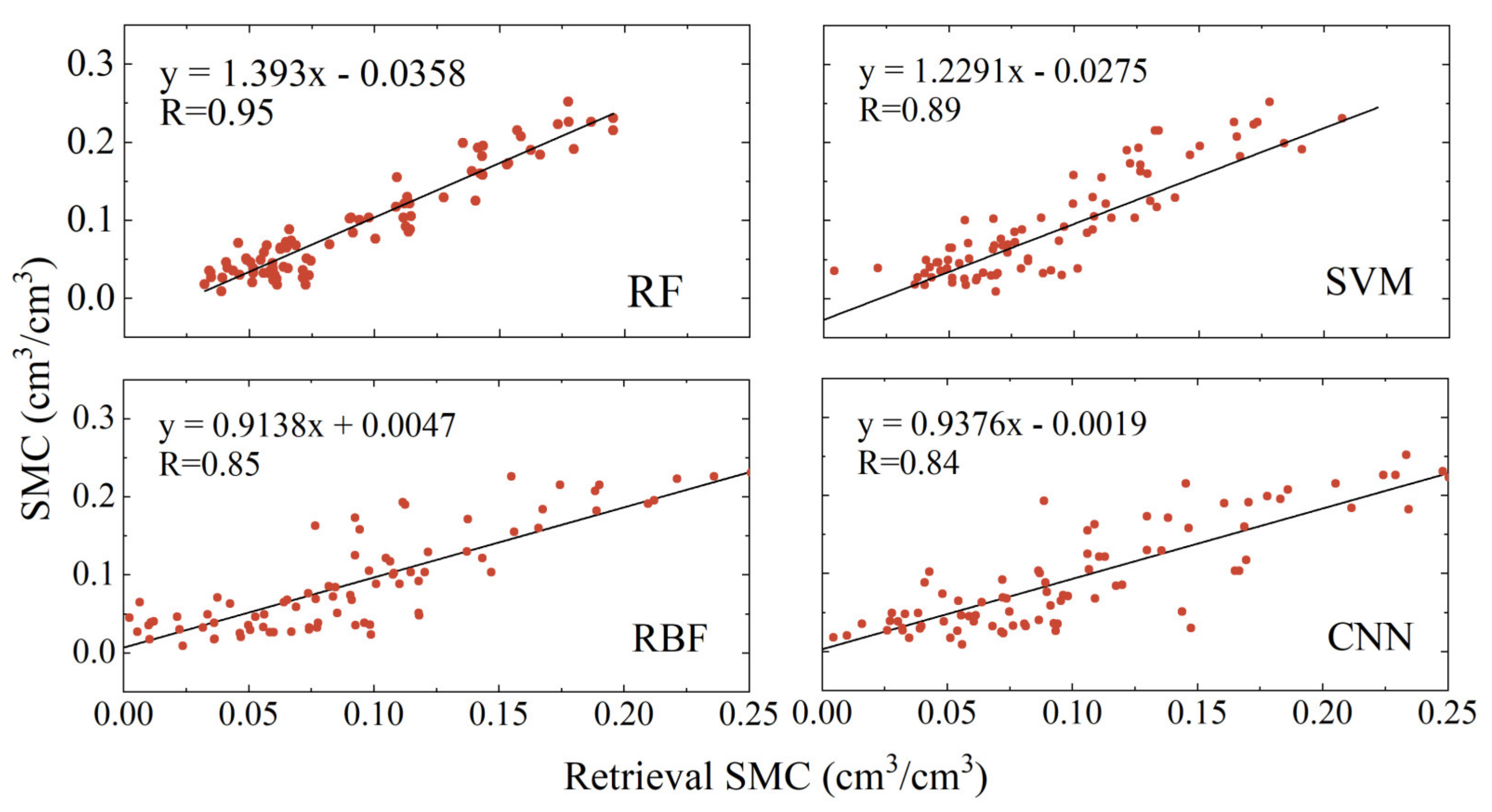
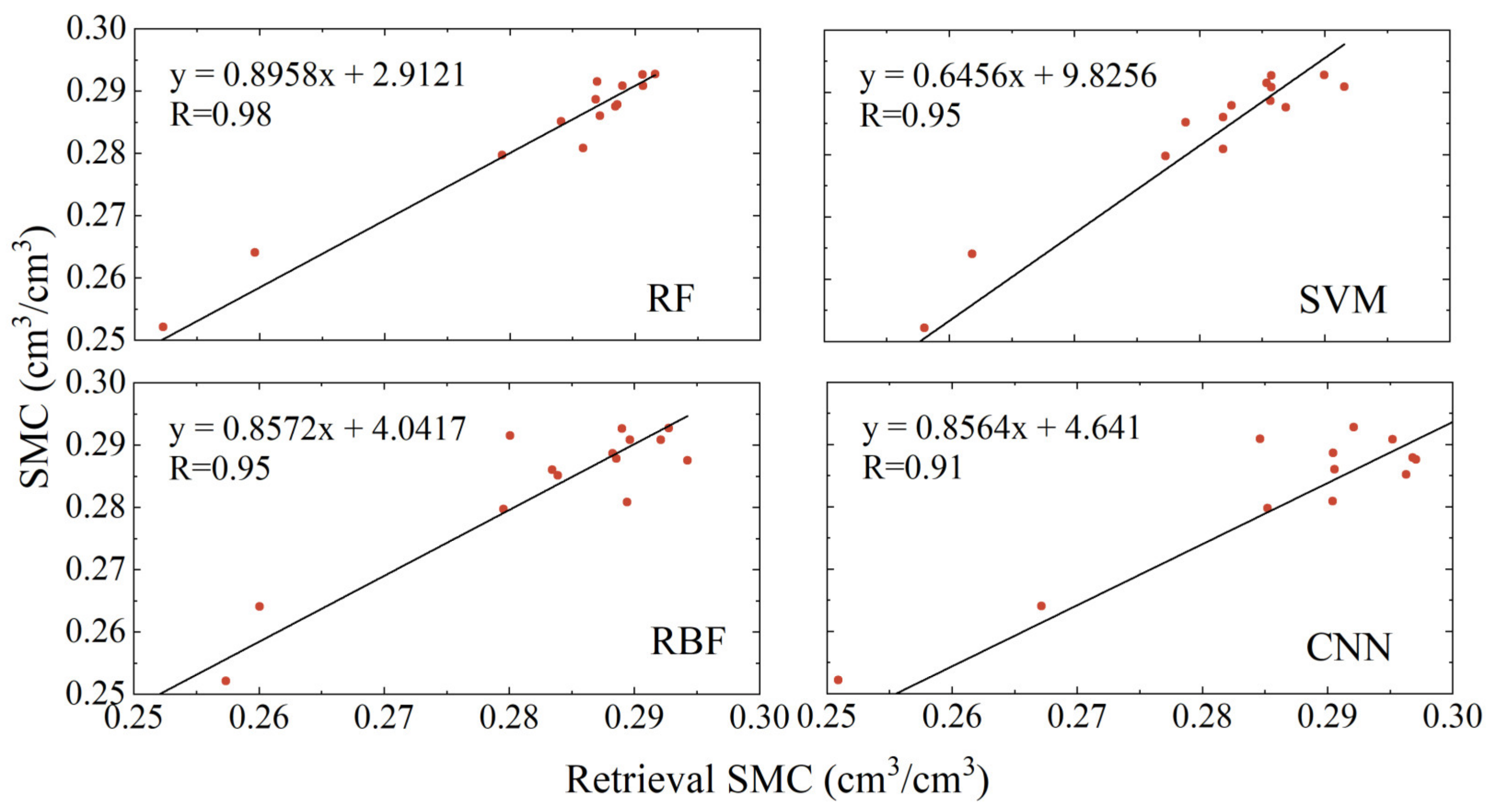
- Using multi-satellite fusion data for soil moisture retrieval effectively enhances data utilization and retrieval accuracy. At station P041, the average R for the four models reached 0.87, with RMSE values ranging between 0.03 and 0.075 cm3/cm3, and MAE values between 0.02 and 0.06 cm3/cm3. At station P037, the average R for the four models was 0.88, with RMSE values between 0.025 and 0.04 cm3/cm3, and MAE values between 0.02 and 0.03 cm3/cm3. At the LM site, the average R for the four models reached 0.94, with RMSE ranging between 0.003 and 0.009 cm3/cm3, and the MAE between 0.002 and 0.007 cm3/cm3.
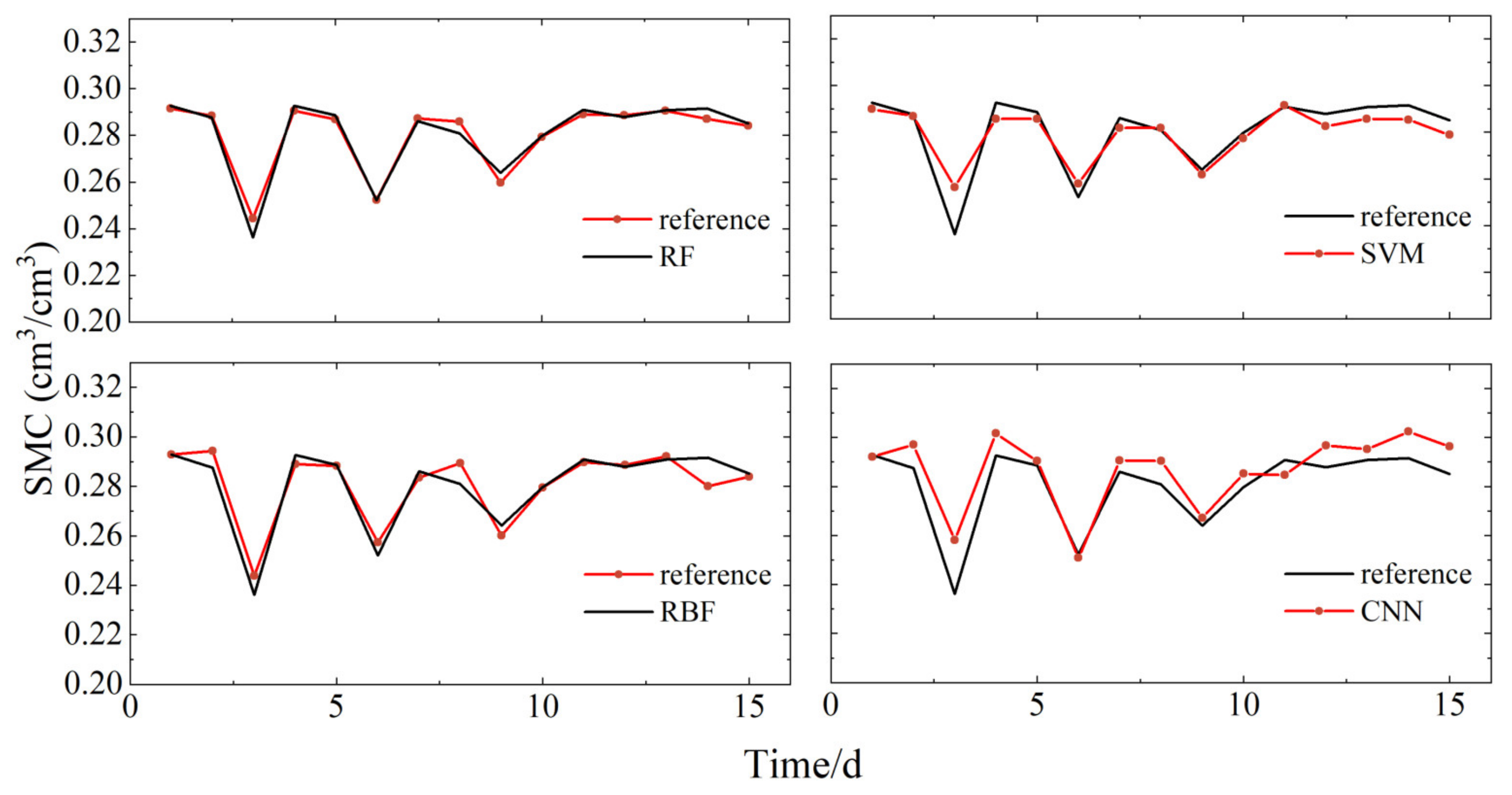
- The Random Forest model, which uses the MDI algorithm to measure the contribution of arcs, significantly improved the robustness of the retrieval results. Compared to the SVM, RBF neural network, and CNN models, the Random Forest model exhibited the best retrieval accuracy. Quantitative results indicate that, at station P041, the R with reference values reached 0.94, with RMSE and MAE around 0.032 cm3/cm3 and 0.025 cm3/cm3, respectively. At station P037, the R reached 0.95, with RMSE and MAE around 0.028 cm3/cm3 and 0.022 cm3/cm3, respectively. At the LM site, the R reached 0.98, with RMSE and MAE around 0.003 cm3/cm3 and 0.002 cm3/cm3, respectively.
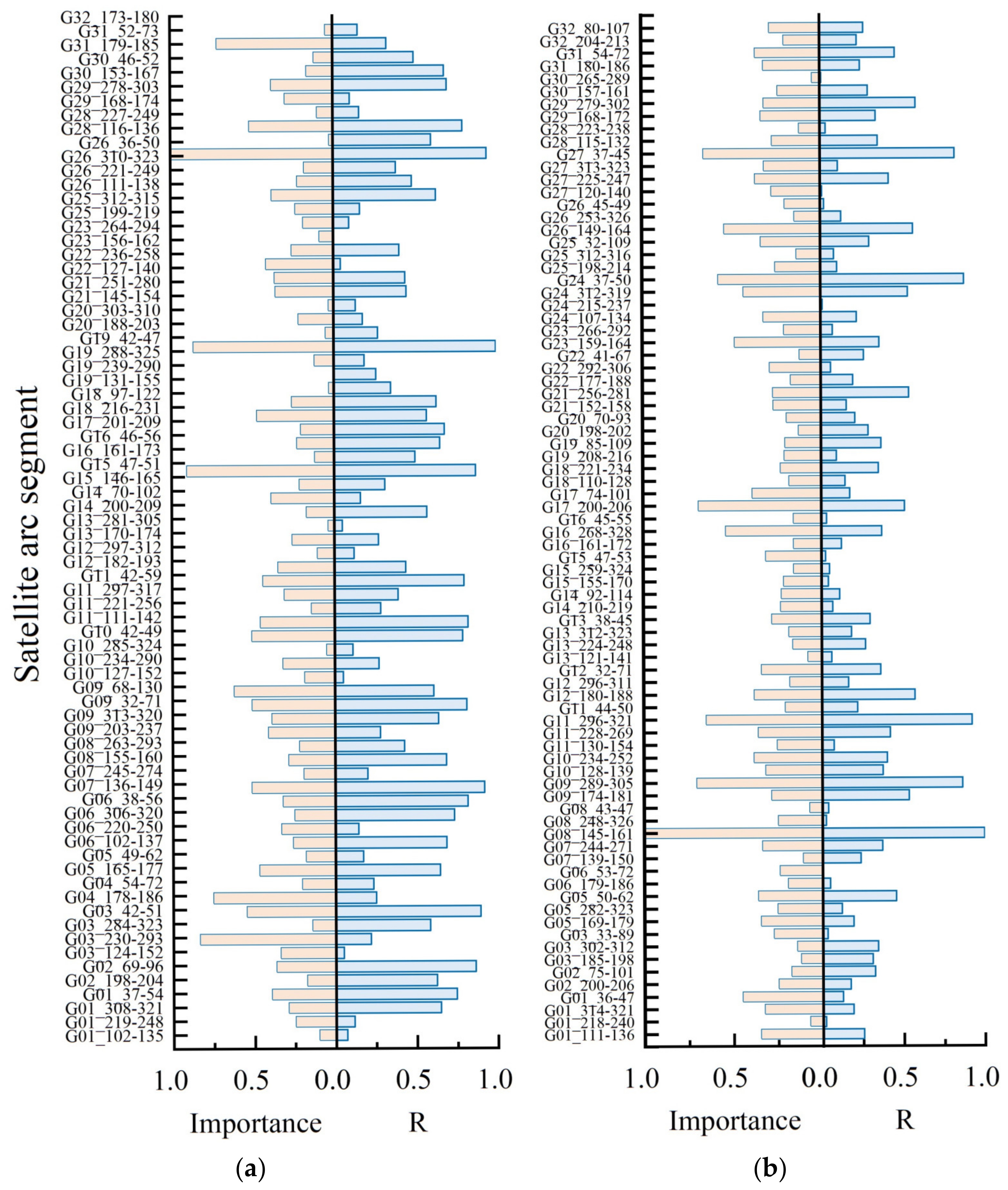
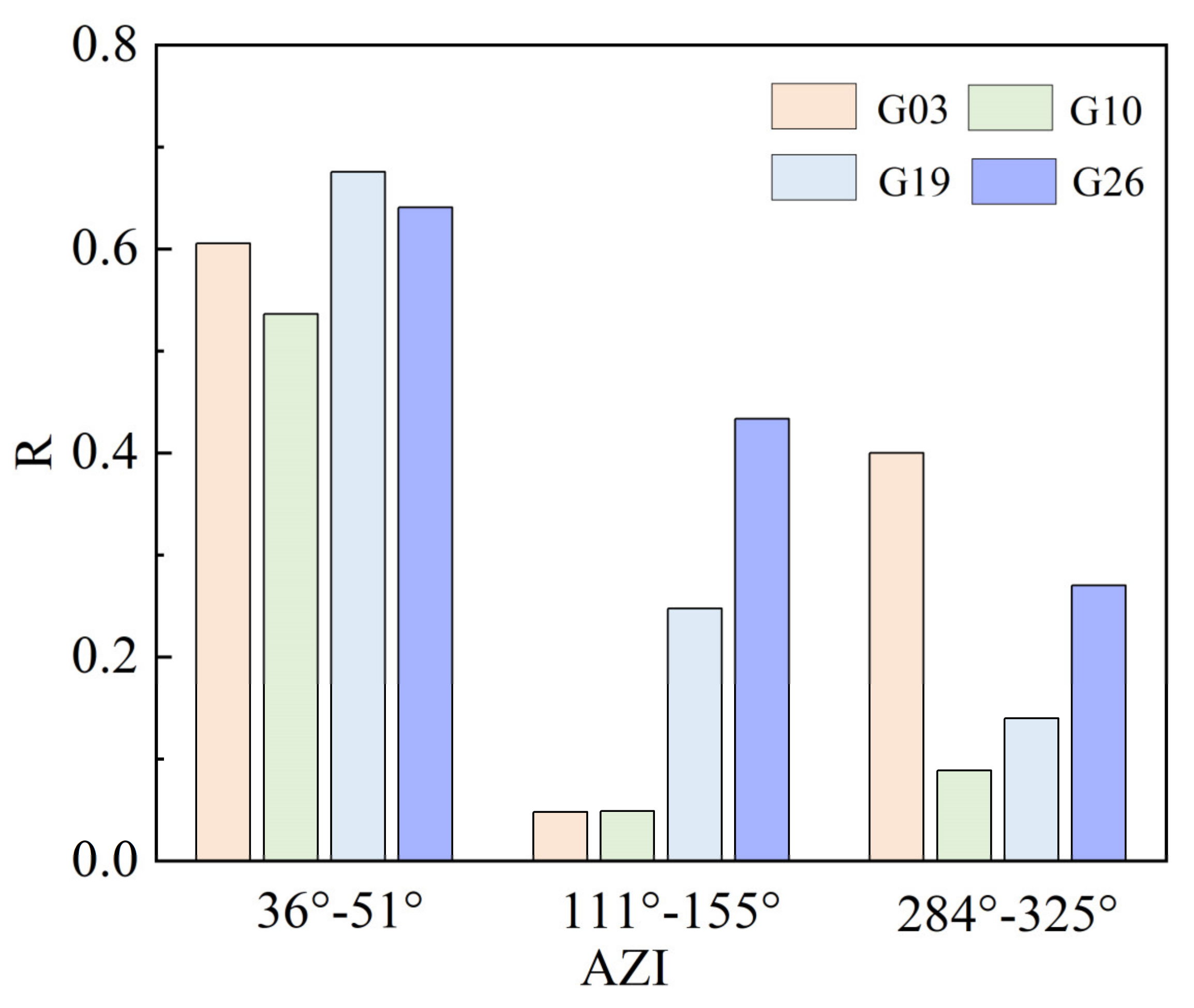
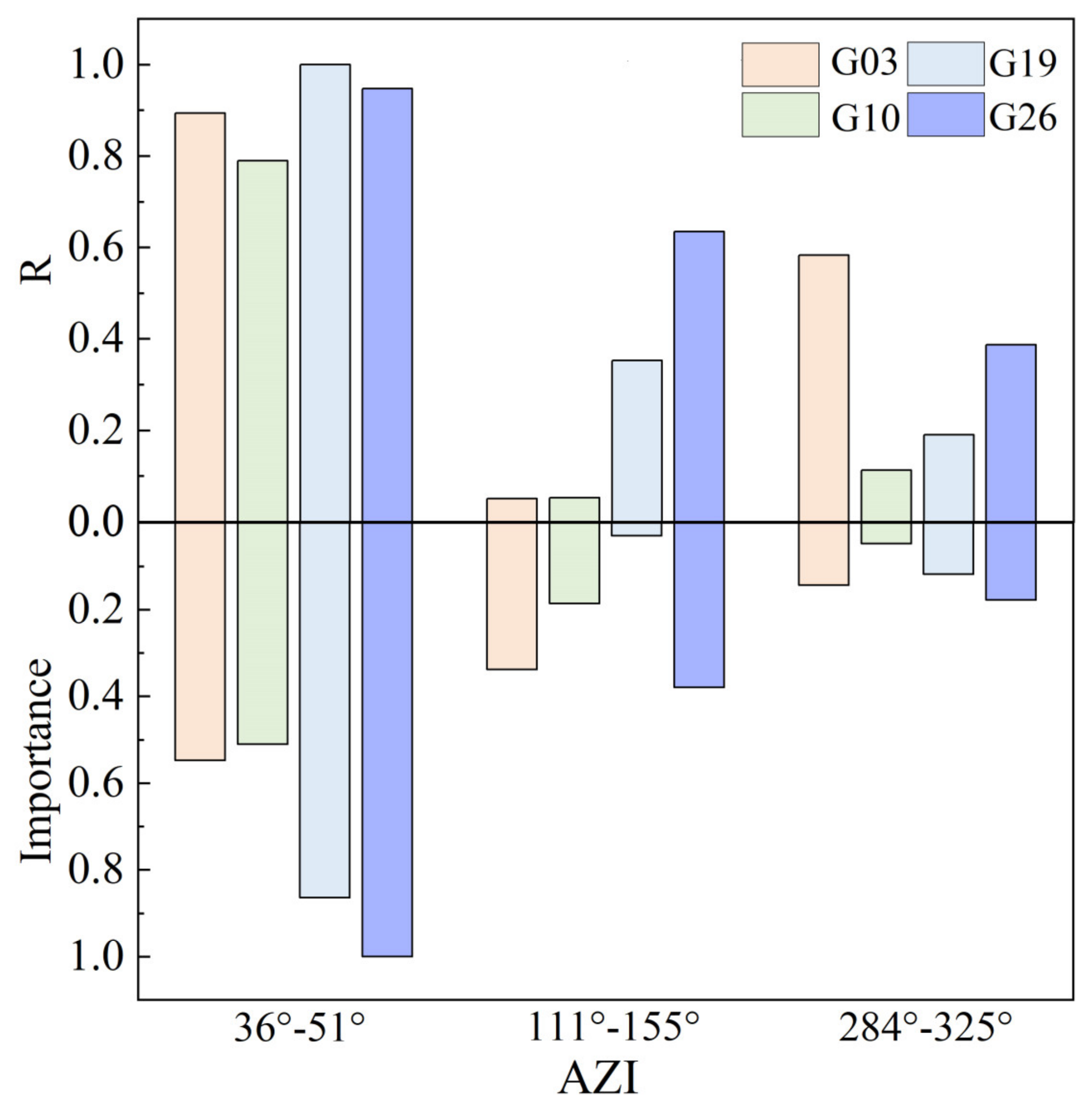
- The Random Forest model, based on the MDI algorithm, demonstrated strong reliability in measuring the importance of arc segments. There was a significant positive correlation between arc segment importance and correlation coefficients. The RF model could adaptively identify arc segments favorable for soil moisture retrieval using the MDI algorithm, and allocated weights according to their importance, exhibiting robustness and generalization performance.
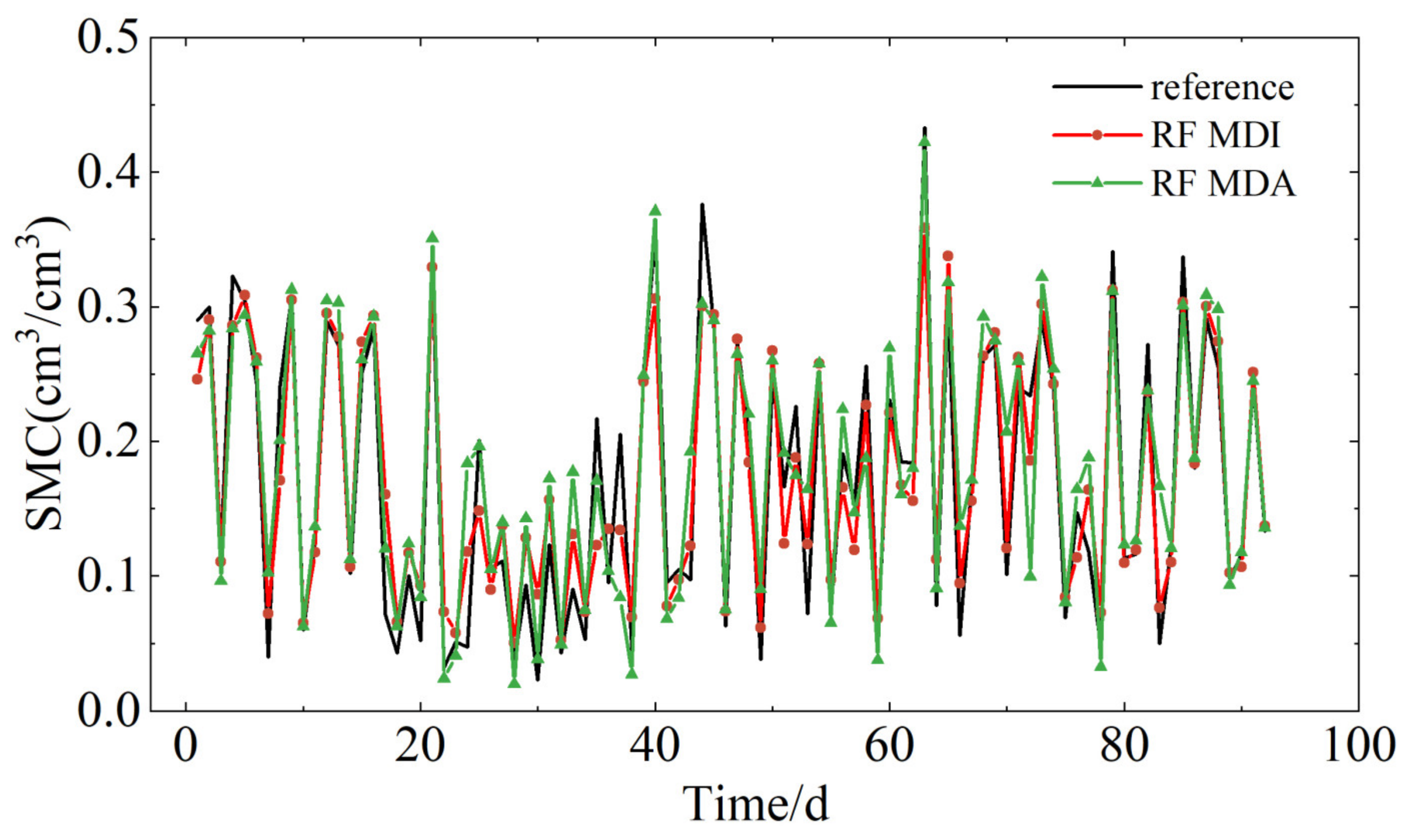
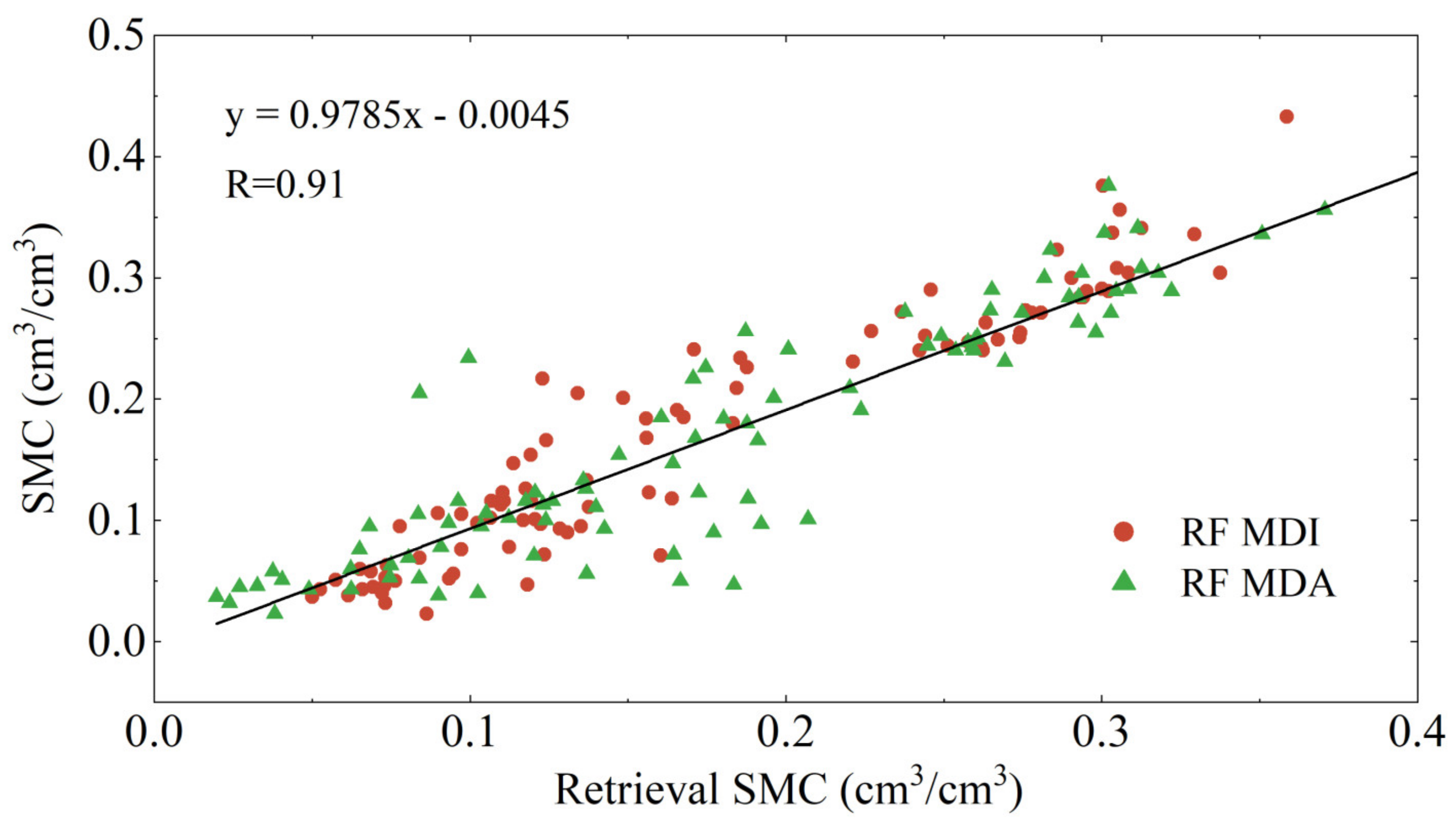
- The Random Forest model based on the MDI algorithm demonstrated strong retrieval performance. Comparative experimental results show that the retrieval results of the RF model using the MDI algorithm were superior to those of the RF model based on the MDA algorithm.
- The Random Forest model based on the MDI algorithm can effectively diminish the impact of terrain undulations on soil moisture retrieval. Experimental results indicate that, in areas with flatter terrain, the correlation between phase data and soil moisture is higher and more stable. Furthermore, the Random Forest model utilizing the MDI algorithm can proficiently identify these data, thereby reducing the influence of terrain factors on soil moisture retrieval.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Jackson, T.J.; Schmugge, J.; Engman, E.T. Remote Sensing Applications to Hydrology: Soil Moisture. Hydrol. Sci. J. 1996, 41, 517–530. [Google Scholar] [CrossRef]
- Lv, J.; Zhang, R.; Tu, J.; Liao, M.; Pang, J.; Yu, B.; Li, K.; Xiang, W.; Fu, Y.; Liu, G. A GNSS-IR Method for Retrieving Soil Moisture Content from Integrated Multi-Satellite Data That Accounts for the Impact of Vegetation Moisture Content. Remote Sens. 2021, 13, 2442. [Google Scholar] [CrossRef]
- Lv, J.; Zhang, R.; Yu, B.; Pang, J.; Liao, M.; Liu, G. A GPS-IR Method for Retrieving NDVI from Integrated Dual-Frequency Observations. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Larson, K.M.; Small, E.E.; Gutmann, E.; Bilich, A.; Axelrad, P.; Braun, J. Using GPS Multipath to Measure Soil Moisture Fluctuations: Initial Results. GPS Solut. 2008, 12, 173–177. [Google Scholar] [CrossRef]
- Wang, T.; Zhang, R.; Liu, A.; Yang, Y.; Lv, J.; Jiang, Y. A Novel Snow Depth Retrieving Approach Using Time-Series Clustering in GPS-IR Data. IEEE Geosci. Remote Sens. Lett. 2024, 21, 1–5. [Google Scholar] [CrossRef]
- Zavorotny, V.U.; Larson, K.M.; Braun, J.J.; Small, E.E.; Gutmann, E.D.; Bilich, A.L. A Physical Model for GPS Multipath Caused by Land Reflections: Toward Bare Soil Moisture Retrievals. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2010, 3, 100–110. [Google Scholar] [CrossRef]
- Chew, C.C.; Small, E.E.; Larson, K.M.; Zavorotny, V.U. Effects of Near-Surface Soil Moisture on GPS SNR Data: Development of a Retrieval Algorithm for Soil Moisture. IEEE Trans. Geosci. Remote Sens. 2014, 52, 537–543. [Google Scholar] [CrossRef]
- Li, Y.; Zhu, M.; Luo, L.; Wang, S.; Chen, C.; Zhang, Z.; Yao, Y.; Hu, X. GNSS-IR Dual-Frequency Data Fusion for Soil Moisture Retrieval Based on Helmert Variance Component Estimation. J. Hydrol. 2024, 631, 130752. [Google Scholar] [CrossRef]
- Bo, S.; Yong, L.; Mutian, H.; Lei, Y.; Lili, J.; Yongqing, Y. GNSS-IR Soil Moisture Retrieval Method Based on GA-SVM. J. Beijing Univ. Aeronaut. Astronaut. 2019, 45, 486–492. [Google Scholar]
- Liang, Y.; Ren, C.; Wang, H.; Huang, Y.; Zheng, Z. Research on Soil Moisture Retrieval Method Based on GA-BP Neural Network Model. Int. J. Remote Sens. 2019, 40, 2087–2103. [Google Scholar] [CrossRef]
- Ren, C.; Liang, Y.-J.; Lu, X.-J.; Yan, H.-B. Research on the Soil Moisture Sliding Estimation Method Using the LS-SVM Based on Multi-Satellite Fusion. Int. J. Remote Sens. 2019, 40, 2104–2119. [Google Scholar] [CrossRef]
- Xian, H.; Shen, F.; Guan, Z.; Zhou, F.; Cao, X.; Ge, Y. A GNSS-IR Soil Moisture Retrieval Method via Multi-Layer Perceptron with Consideration of Precipitation and Environmental Factors. GPS Solut. 2024, 28, 122. [Google Scholar] [CrossRef]
- Larson, K.M.; Small, E.E.; Gutmann, E.D.; Bilich, A.L.; Braun, J.J.; Zavorotny, V.U. Use of GPS Receivers as a Soil Moisture Network for Water Cycle Studies. Geophys. Res. Lett. 2008, 35, 2008GL036013. [Google Scholar] [CrossRef]
- Wan, W.; Larson, K.M.; Small, E.E.; Chew, C.C.; Braun, J.J. Using Geodetic GPS Receivers to Measure Vegetation Water Content. GPS Solut. 2015, 19, 237–248. [Google Scholar] [CrossRef]
- Glynn, E.F.; Chen, J.; Mushegian, A.R. Detecting Periodic Patterns in Unevenly Spaced Gene Expression Time Series Using Lomb-Scargle Periodograms. Bioinformatics 2006, 22, 310–316. [Google Scholar] [CrossRef] [PubMed]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Ashourloo, D.; Aghighi, H.; Matkan, A.A.; Mobasheri, M.R.; Rad, A.M. An Investigation into Machine Learning Regression Techniques for the Leaf Rust Disease Detection Using Hyperspectral Measurement. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4344–4351. [Google Scholar] [CrossRef]
- Yan, Q.; Huang, W. Detecting Sea Ice from TechDemoSat-1 Data Using Support Vector Machines with Feature Selection. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 1409–1416. [Google Scholar] [CrossRef]
- Liang, Y.; Lai, J.; Ren, C.; Lu, X.; Zhang, Y.; Ding, Q.; Hu, X. GNSS-IR Multisatellite Combination for Soil Moisture Retrieval Based on Wavelet Analysis Considering Detection and Repair of Abnormal Phases. Measurement 2022, 203, 111881. [Google Scholar] [CrossRef]
- Larson, K.M.; Braun, J.J.; Small, E.E.; Zavorotny, V.U.; Gutmann, E.D.; Bilich, A.L. GPS Multipath and Its Relation to Near-Surface Soil Moisture Content. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2010, 3, 91–99. [Google Scholar] [CrossRef]
- Chew, C.C. Soil Moisture Remote Sensing Using GPS-Interferometric Reflectometry. Ph.D. Thesis, University of Colorado, Boulder, CO, USA, 2015. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Station | P041 | P037 | LM |
|---|---|---|---|
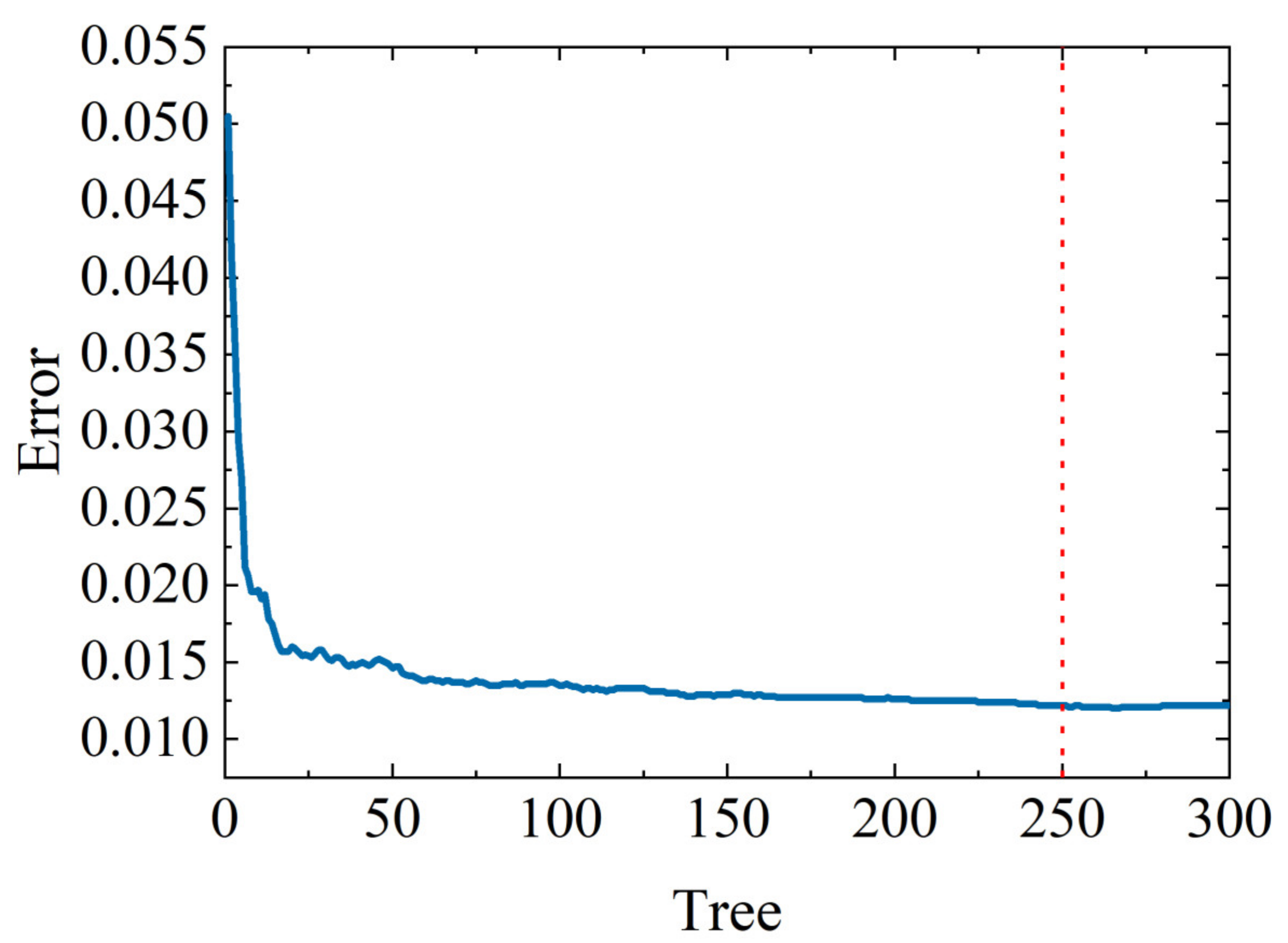
| Decision tree | 300 | 300 | 150 |
| Minimum leaves | 3 | 2 | 2 |
| Station | Model | R | RMSE | MAE |
|---|---|---|---|---|
| cm3/cm3 | cm3/cm3 | |||
| P041 | RF | 0.94 | 0.032 | 0.025 |
| SVM | 0.89 | 0.048 | 0.037 | |
| RBF | 0.81 | 0.072 | 0.059 | |
| CNN | 0.83 | 0.062 | 0.049 | |
| P037 | RF | 0.95 | 0.028 | 0.022 |
| SVM | 0.89 | 0.033 | 0.026 | |
| RBF | 0.85 | 0.036 | 0.028 | |
| CNN | 0.84 | 0.038 | 0.029 | |
| LM | RF | 0.98 | 0.003 | 0.002 |
| SVM | 0.95 | 0.007 | 0.005 | |
| RBF | 0.95 | 0.005 | 0.004 | |
| CNN | 0.91 | 0.009 | 0.007 |
| Station | Model | R | RMSE | MAE |
|---|---|---|---|---|
| cm3/cm3 | cm3/cm3 | |||
| P041 | RF MDI | 0.94 | 0.032 | 0.025 |
| RF MDA | 0.91 | 0.042 | 0.029 |
| AZI | 36°–51° | 111°–155° | 284°–325° |
|---|---|---|---|
| Satellite | R | R | R |
| G03 | 0.6 | 0.04 | 0.4 |
| G10 | 0.53 | 0.04 | 0.08 |
| G19 | 0.67 | 0.24 | 0.14 |
| G26 | 0.64 | 0.43 | 0.27 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, Y.; Zhang, R.; Sun, B.; Wang, T.; Zhang, B.; Tu, J.; Nie, S.; Jiang, H.; Chen, K. GNSS-IR Soil Moisture Retrieval Using Multi-Satellite Data Fusion Based on Random Forest. Remote Sens. 2024, 16, 3428. https://doi.org/10.3390/rs16183428
Jiang Y, Zhang R, Sun B, Wang T, Zhang B, Tu J, Nie S, Jiang H, Chen K. GNSS-IR Soil Moisture Retrieval Using Multi-Satellite Data Fusion Based on Random Forest. Remote Sensing. 2024; 16(18):3428. https://doi.org/10.3390/rs16183428
Chicago/Turabian StyleJiang, Yao, Rui Zhang, Bo Sun, Tianyu Wang, Bo Zhang, Jinsheng Tu, Shihai Nie, Hang Jiang, and Kangyi Chen. 2024. "GNSS-IR Soil Moisture Retrieval Using Multi-Satellite Data Fusion Based on Random Forest" Remote Sensing 16, no. 18: 3428. https://doi.org/10.3390/rs16183428
APA StyleJiang, Y., Zhang, R., Sun, B., Wang, T., Zhang, B., Tu, J., Nie, S., Jiang, H., & Chen, K. (2024). GNSS-IR Soil Moisture Retrieval Using Multi-Satellite Data Fusion Based on Random Forest. Remote Sensing, 16(18), 3428. https://doi.org/10.3390/rs16183428