1. Introduction
Under the Global Geodetic Observing System (GGOS) initiative, the International Association of Geodesy (IAG) set the accuracy and stability requirements for a Terrestrial Reference Frame (TRF) at 1 mm and
mm/year to meet the scientific needs of various Earth science disciplines [
1]. The ITRF2020 is the latest realization of the International Terrestrial Reference Frame (ITRF) [
2]. It is established by observations from four space geodetic techniques: Very Long Baseline Interferometry (VLBI), Global Navigation Satellite Systems (GNSS), Satellite Laser Ranging (SLR), and Doppler Orbitography and Radiopositioning Integrated by Satellite (DORIS). These techniques are combined with terrestrial local tie measurements at co-location sites. Despite representing the most accurate realization of a TRF, the long-term position and time evolution of the ITRF2020 is estimated to be on the order of 5 mm and
mm/year, respectively, [
2].
In the ITRF2020, a large fraction of discrepancies between terrestrial local ties and space geodesy estimates exceed 5 mm. A useful tool to improve the combination of the individual techniques is the concept of space ties [
3], the co-locations of several space geodetic techniques on satellites, with the aim of strengthening inter-technique ties. Mission proposals, such as GRASP [
4] and E-GRASP [
5], which aimed to combine instruments of GNSS, SLR, VLBI, and DORIS on a single Earth-orbiting satellite, have not been approved in the past.
In November 2022, the European Space Agency’s (ESA) Ministerial Council approved the GENESIS satellite mission as a component of the FutureNAV program [
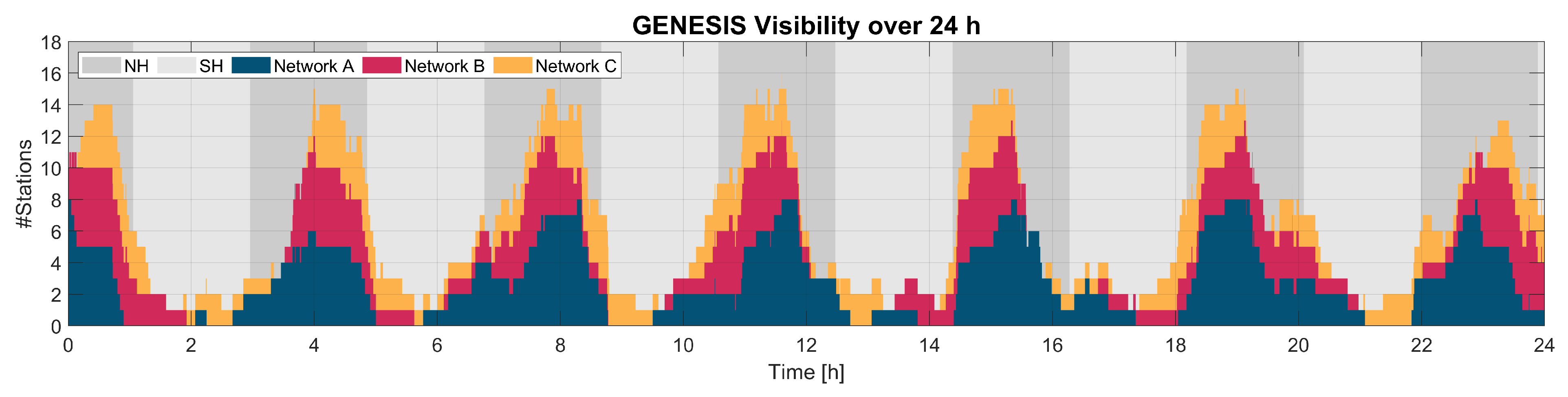
6]. Scheduled for launch in 2028, GENESIS will be a satellite platform flying in a polar orbit at an altitude of about 6000 km. It will carry instruments of all four space geodetic techniques. These instruments will be co-located with carefully calibrated reference points on board the satellite. The ground stations of all space geodetic techniques will be indirectly interconnected through observations of the instruments on the GENESIS satellite (see
Figure 1). The primary objective of the mission is the implementation of in-orbit space ties, which have the potential to improve the accuracy and stability of future realizations of the ITRF. With the GENESIS mission approved, it is now up to the geodetic community to develop optimal observing and analysis strategies. At the time of writing, the design of the VLBI transmitter onboard the GENESIS satellite is still under development. As part of the GENESIS Science Exploitation Team (GSET), Working Group 3, which includes experts in the field of VLBI, is providing advice and assistance to ESA in this design process. The key factors driving the antenna design include regulations set forth by the International Telecommunication Union (ITU), radio frequency interference (RFI), and the compatibility with legacy S/X and VLBI Global Observing System (VGOS) stations.
VLBI observations of Earth-orbiting satellites are not standard and are not performed routinely yet. However, in several test experiments (e.g., [
7,
8,
9]) it was demonstrated that the technical challenges inherent to VLBI observations of near-field targets can be overcome by adjustments to the standard VLBI processing pipeline [
10]. In addition to real observations, several simulation studies were conducted to assess the potential of VLBI observations of Earth-orbiting satellites. For example, Plank et al. [
11], Männel [
12], and Schunck et al. [
13] estimated the VLBI station positions from simulated observations of GNSS satellite constellations utilizing the satellites’ navigation signals in L-band. Other studies assume a VLBI transmitter on satellites, as is the case for GENESIS. Plank et al. [
14] estimated VLBI station positions from simulated observations of a co-location satellite with orbital parameters following the proposed GRASP mission as well as LAGEOS-1. Anderson et al. [
15] simulated and assessed the frame tie performance with a GENESIS-like satellite. Wolf and Böhm [
16] presented a simulation study on the optimal distribution of VLBI transmitters on the Galileo space segment for frame ties. The most recent numerical simulations for a GENESIS-like co-location satellite were presented by Pollet et al. [
17]. The authors followed a more extensive approach, simulating observations for all four space geodetic techniques and combining them at the observation level. Klopotek et al. [
18] evaluated the potential of VLBI observations of Earth-orbiting satellites for precise orbit determination. Based on combined schedules with both geodetic radio sources and either LAGEOS-1/-2 or a set of Galileo satellites, the authors derive orbit solutions as well as geodetic parameters, i.e., VLBI stations positions, Earth rotation parameters, and geocenter offsets.
Despite previous efforts in this area, further investigations and simulations are required with regard to the integration of GENESIS into VLBI operations [
19]. In addition to deficiencies in the employed antenna networks and the error modeling of observations, existing studies that consider a co-location satellite do not undertake a dedicated scheduling of experiments. Instead, scans of geodetic sources are replaced at regular intervals using standard VLBI schedules, or scans are simply assumed to be performed at regular intervals. This results in abstruse numbers of scans and observations, which are challenging to interpret and do not reflect realistic numbers in schedules with a co-location satellite.
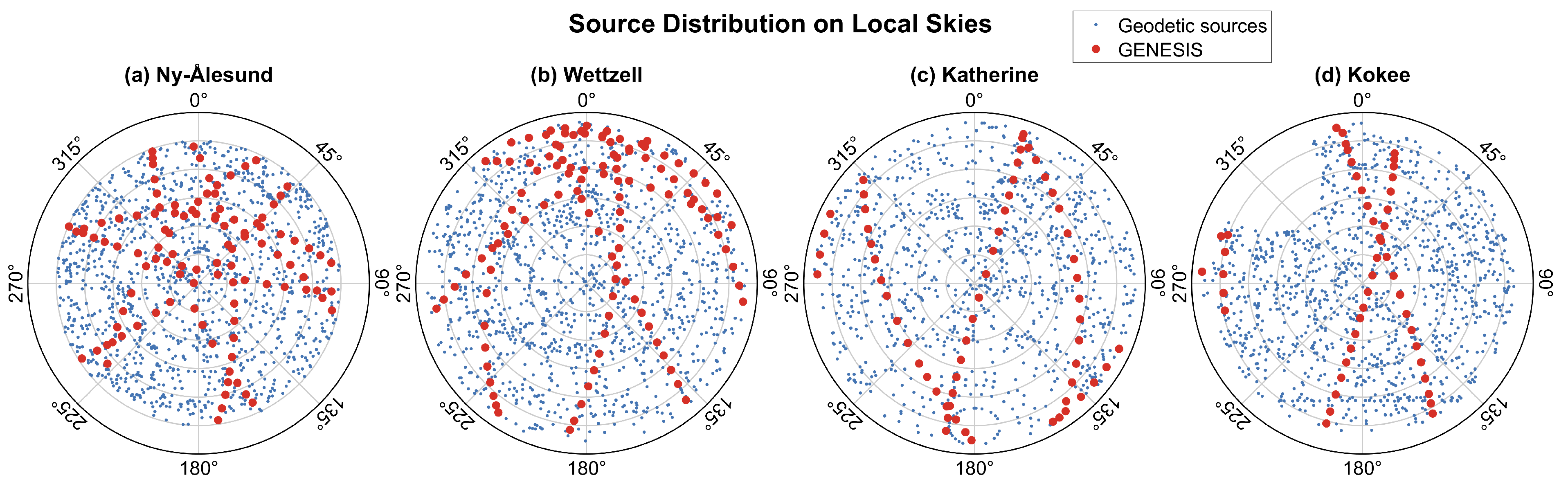
In VLBI experiments, the participating stations are coordinated to observe a list of geodetic sources in an optimized sequence. In this manuscript, the term “geodetic sources” is used to refer to compact extragalactic radio sources observed in VLBI experiments. When integrating GENESIS as an additional source, two principal consideration must be taken into account. On the one hand, a certain number of scans of GENESIS should be scheduled to link the VLBI frame to the GENESIS frame with high accuracy. However, on the other hand, a substantial number of scans of geodetic sources are required to estimate geodetic parameters, including station positions, Earth Orientation Parameters (EOPs), and geodetic source positions, with consistent accuracy. Given that the geodetic sources and GENESIS compete for the observing time of the participating stations, it is essential to conduct a thorough analysis to determine the amount of allocated observing time for GENESIS.
This work addresses the uncertainties of the integration of GENESIS into global VGOS operations. VLBI experiments with the modern VGOS antennas are currently not running continuously as envisaged in Petrachenko et al. [
20], but only two to four times per month. At present, data storage, data transfer, and correlation time are the bottlenecks of VGOS operations [
21]. Therefore, we assess the feasibility of integrating observations of GENESIS within the 24 h experiments of the regular VGOS operations, rather than conducting additional dedicated experiments that would further strain the limited resources. Building upon previous simulation studies [
13,
14,
15,
16], we present a dedicated simulation study from a VLBI perspective. We show a comprehensive analysis on the integration of GENESIS into VGOS experiments. The scheduling is conducted with the well-established scheduling software VieSched++ v1.34 [
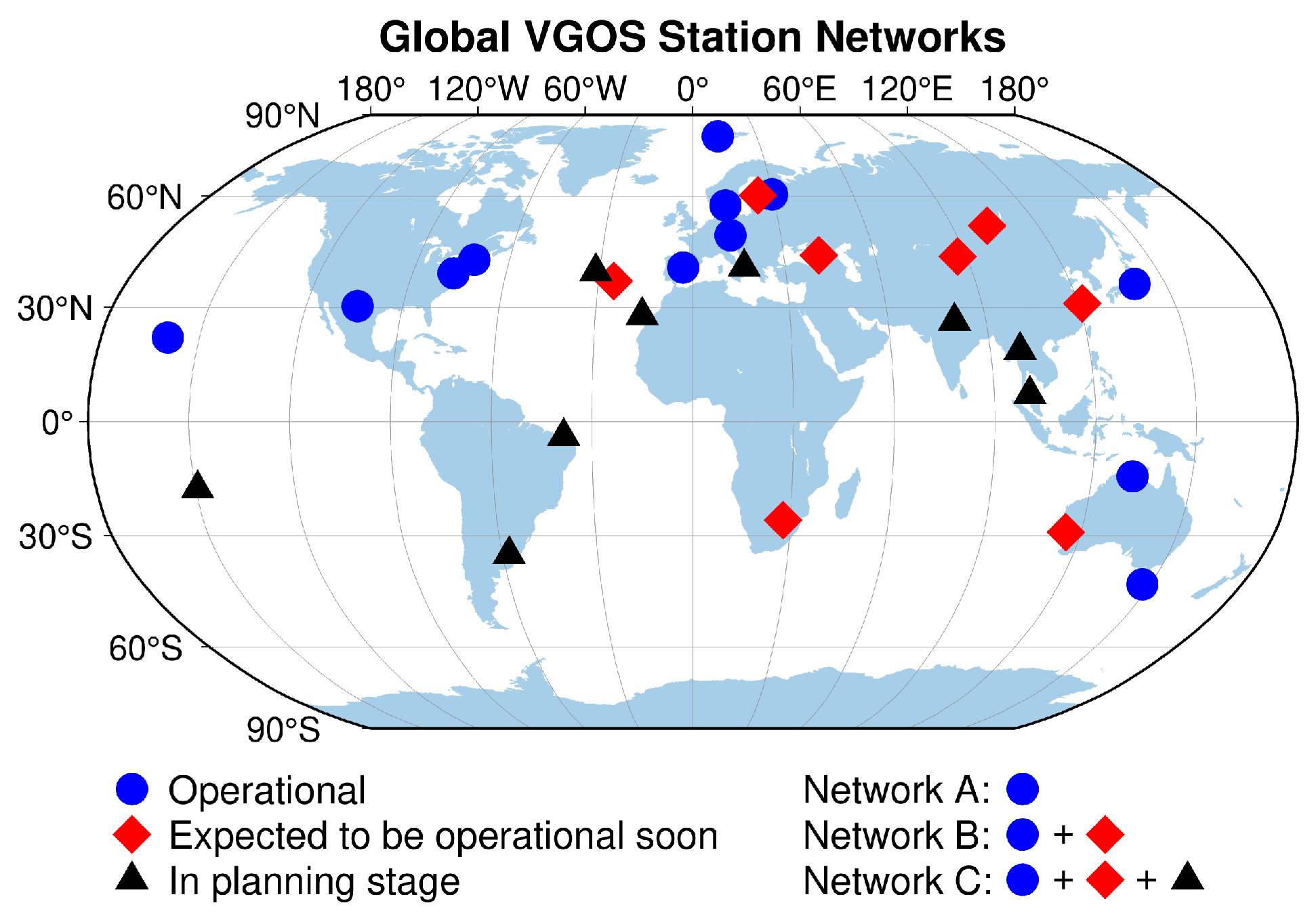
22], taking into account actual antenna characteristics. Based on realistic schedules with current and projected VGOS antenna networks, we perform extensive Monte Carlo simulations of VLBI observations of GENESIS and geodetic sources. The investigations focus on the development of an optimal scheduling strategy and the evaluation of the impact of integrating GENESIS into VGOS experiments on the estimation of geodetic parameters. In a previous study, Klopotek et al. [
18] integrated observations of LAGEOS-1/-2 into VLBI experiments with a legacy S/X antenna network. The authors notice no negative impact on the estimation of geodetic parameters. In comparison, this work significantly enhances the investigation of the integration of GENESIS by considering its actual orbit, utilizing a modern VGOS antenna network, and conducting comprehensive scheduling. In contrast to prior studies, this investigation addresses the trade-off between the negative impact of GENESIS on geodetic parameter estimates and the estimated frame tie accuracy between the VLBI and GENESIS frames. The frame tie accuracy is evaluated in the form of station position estimates from observations of GENESIS. It is established from 24 h experiments as well as over an extended period of up to 12 months.
Section 2 outlines the concept of this work, while
Section 3 presents the methodology.
Section 4 shows the results, which are then discussed in
Section 5.
2. Concept
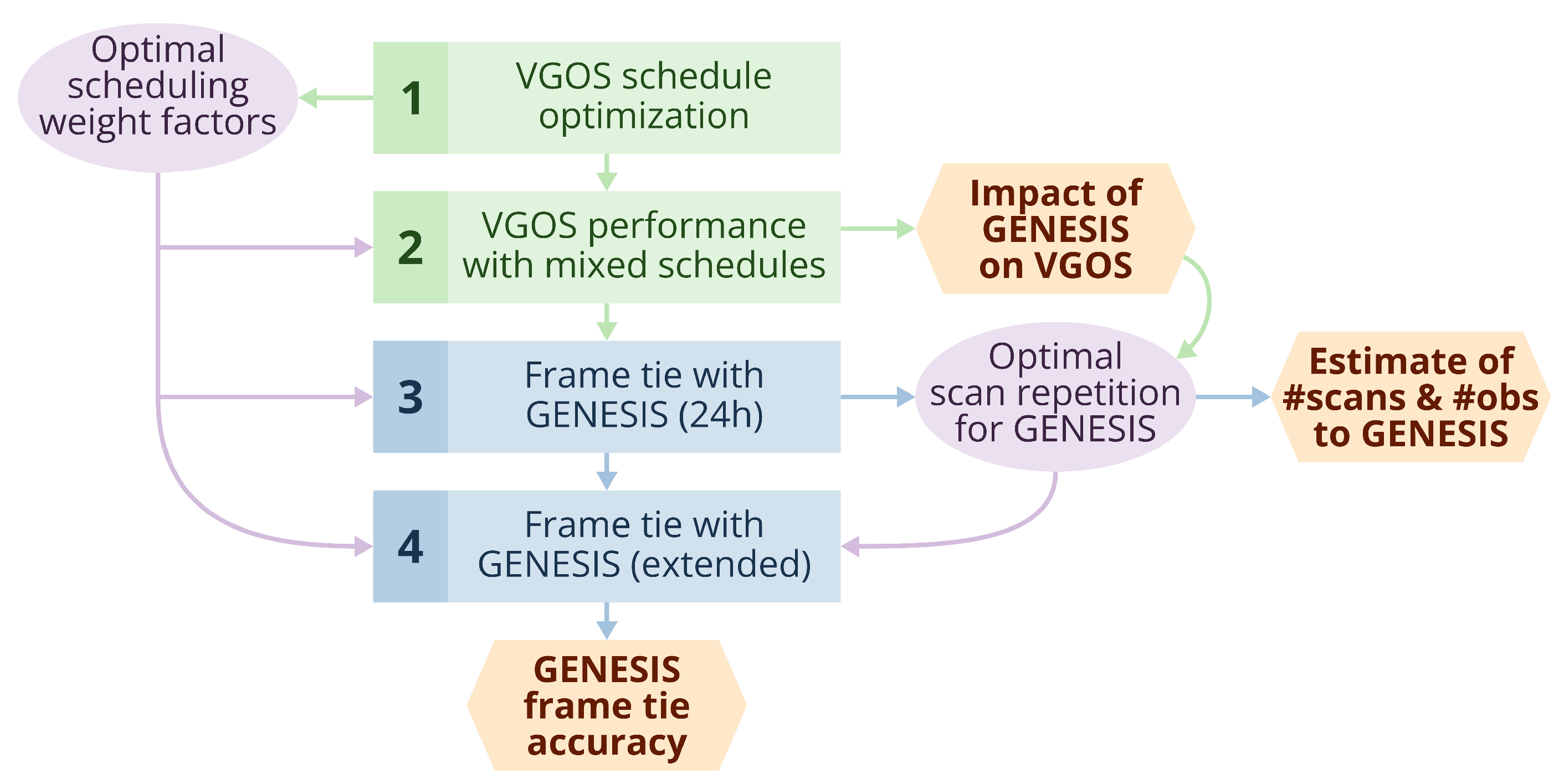
The concept of this work comprising four main steps is visualized in
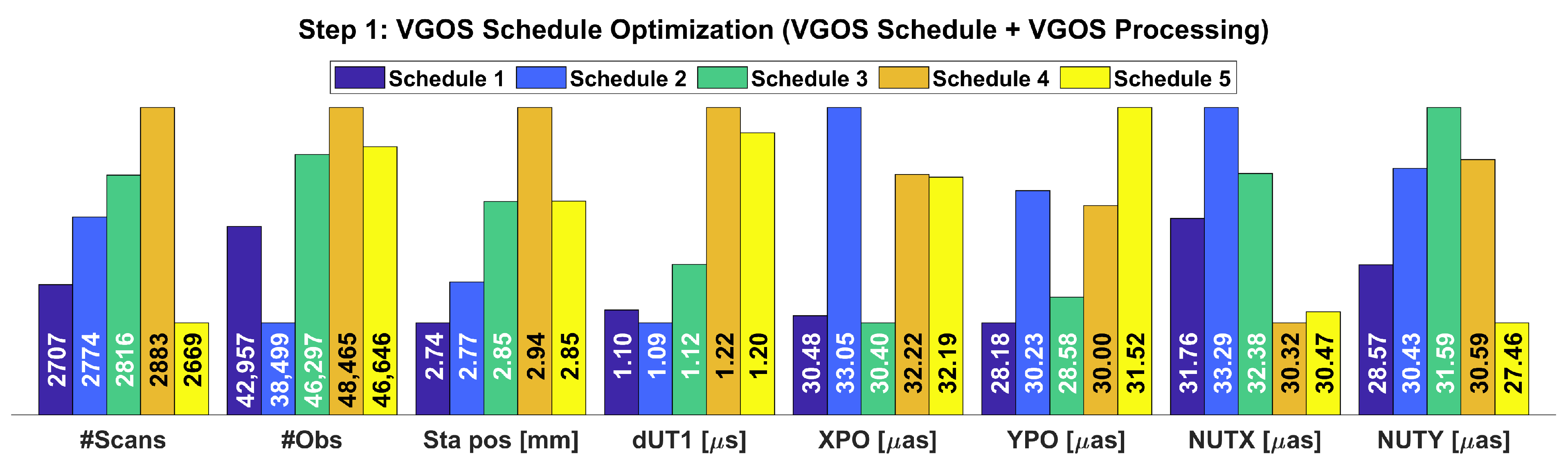
Figure 2. In step 1, we perform a schedule optimization following the work by Schartner and Böhm [
23]. VLBI scheduling is a complex optimization problem in which scheduling weight factors play a crucial role. For example, they determine whether stations slew long distances between scans to benefit from evenly distributed sky coverage or keep the slew time between scans short to maximize the number of observations. Because scheduling weight factors decisively impact the results, they should be optimized for each VLBI experiment. The VGOS schedule optimization performed in step 1 uses schedules which only contain geodetic radio sources, further referred to as VGOS schedules. Based on sets of scheduling weight factors, schedules are created and simulations are performed to estimate station position, EOPs, and source positions. The result is a set of optimal scheduling weight factors that correspond to the best estimation precision. In the following steps 2, 3, and 4, these optimal scheduling weight factors are applied to the generation of schedules using both geodetic sources and GENESIS, further referred to as mixed schedules. We assume that the optimal scheduling weight factors for VGOS schedules are also optimal for the estimation of geodetic parameters for mixed schedules.
In step 2, we analyze the VGOS performance in mixed schedules. Or, in other words, we investigate to what extent the integration of GENESIS into VGOS experiments impacts the estimation of geodetic parameters. Applying the optimal scheduling weight factors from step 1, we generate schedules containing both geodetic sources and GENESIS. Consequently, the number of scans and observations of geodetic sources is reduced in mixed schedules compared to VGOS schedules. From the mixed schedules, the geodetic parameters are estimated solely from the observations of geodetic sources. In this step, observations of GENESIS do not contribute to the analysis and are disregarded. The simulated results are compared to step 1 to derive the degradation of the parameter estimates.
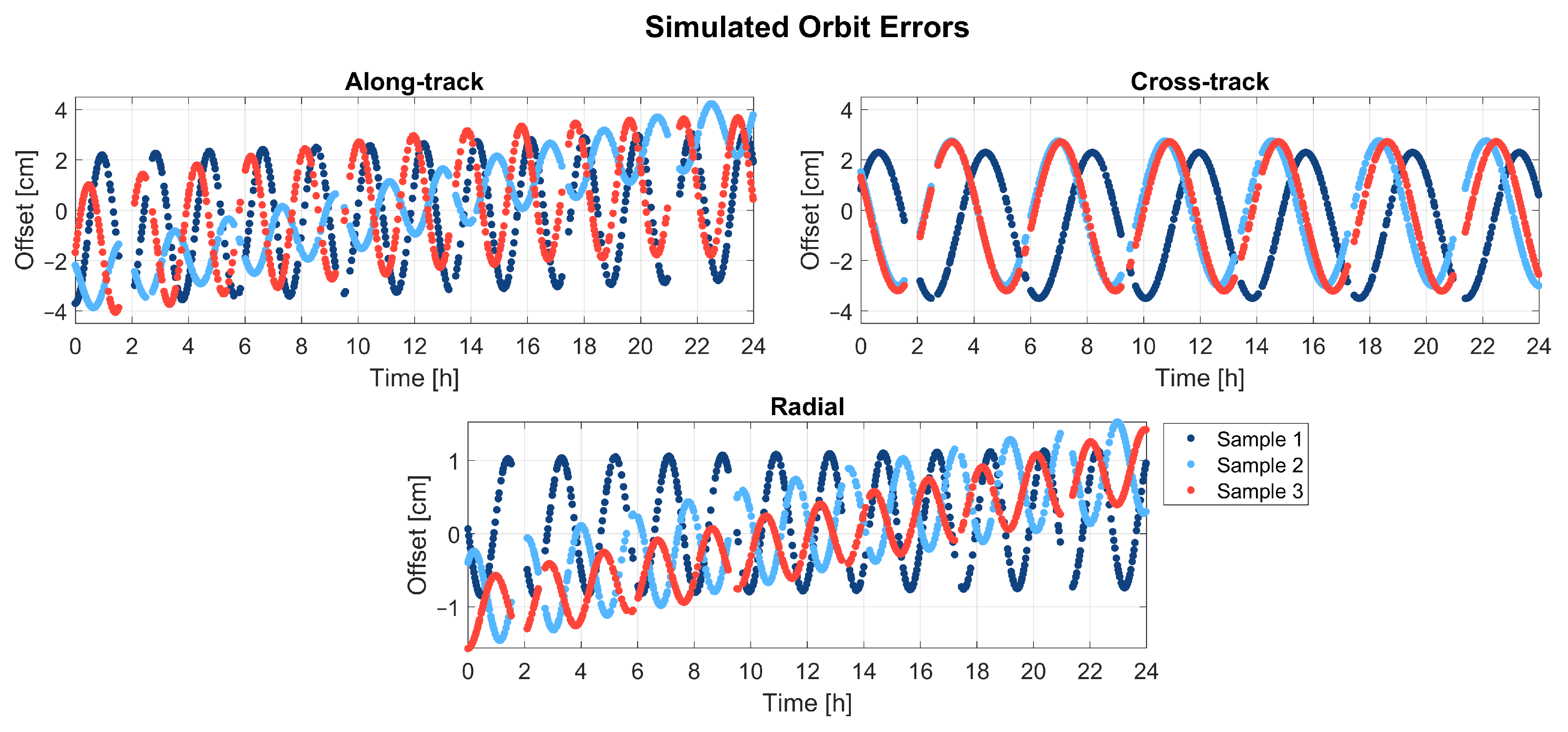
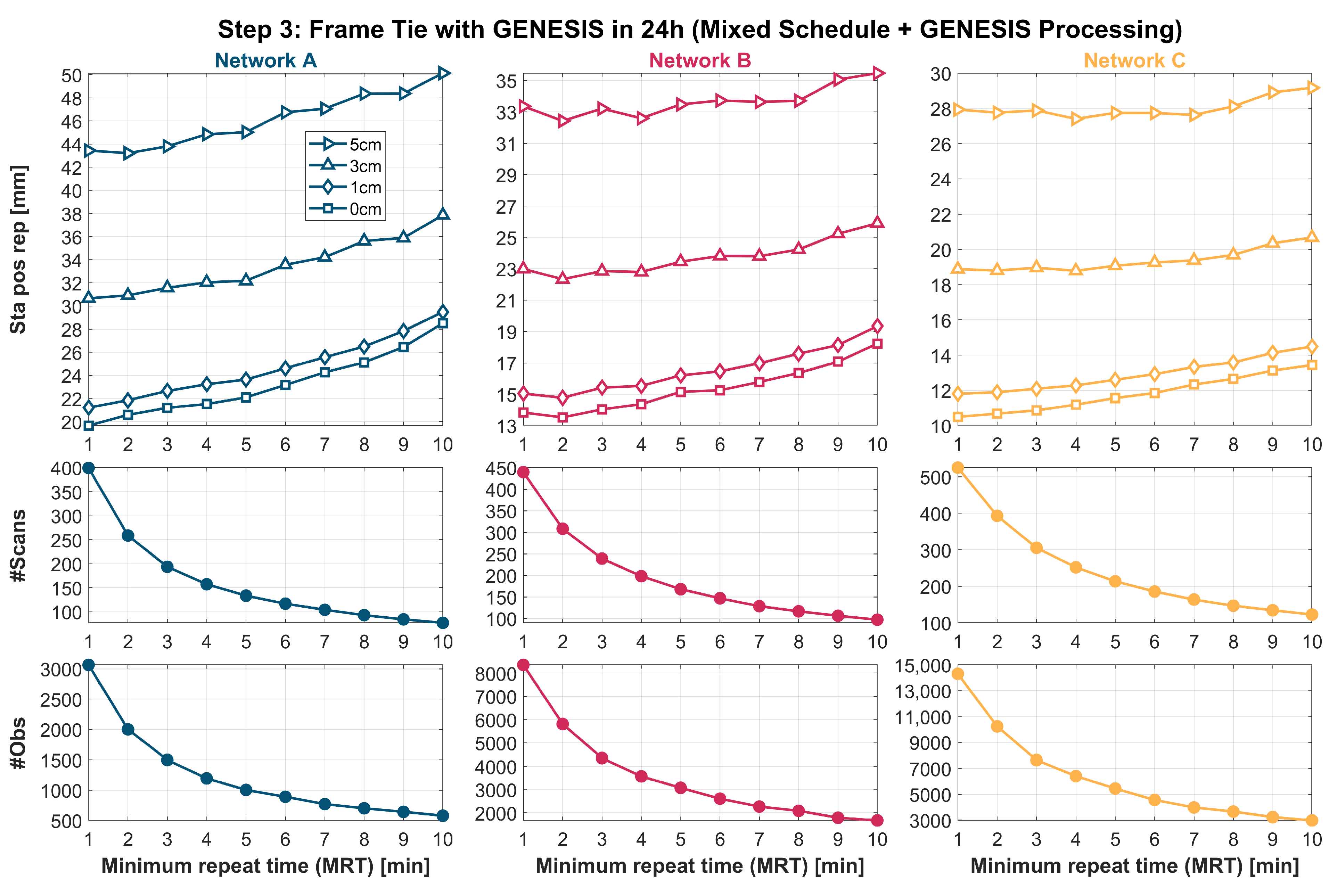
In step 3, the mixed schedules from step 2 are used to estimate the frame tie between the VLBI frame and the GENESIS frame from 24 h VLBI experiments. We assume that the GENESIS orbit is determined through observations of the satellite techniques (GNSS, SLR, and DORIS). As this orbit is assumed to be imperfect, we simulate orbital errors as further detailed in
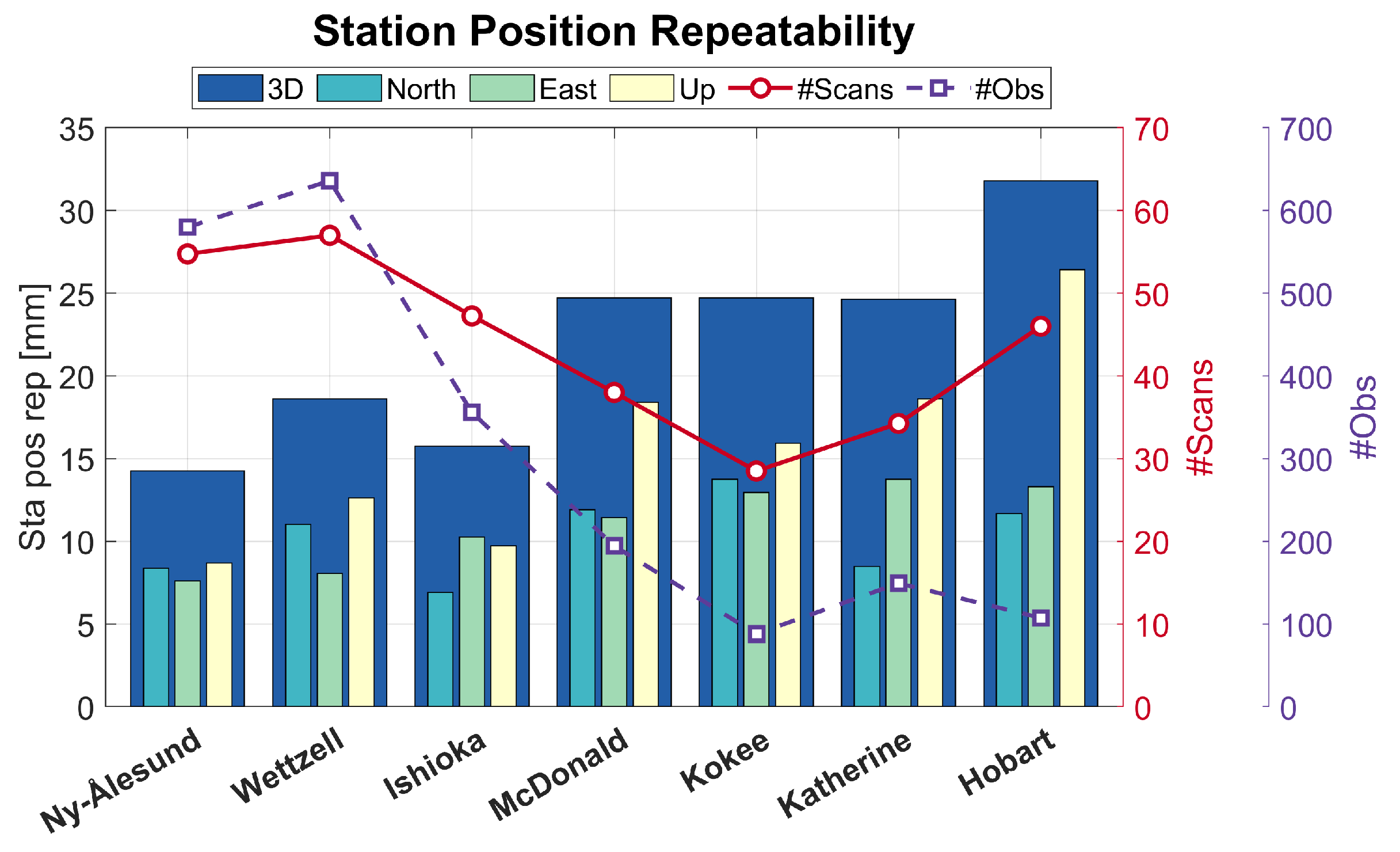
Section 3. In this study, the VLBI frame is then attached to the GENESIS frame through observations of the satellite. We define the frame tie as the VLBI station positions derived only from VLBI observations of GENESIS. It is assumed that with a set of VLBI station positions given in the initial VLBI frame and a set of estimated VLBI station positions given in the GENESIS frame, a frame tie can be established to link the frames. The repeatability of the station position estimates is a measure for the expected frame tie accuracy. This analysis builds upon previous studies by Plank et al. [
14], Anderson et al. [
15], Wolf and Böhm [
16], and Schunck et al. [
13]. The optimal scan repetition rate with which GENESIS will be integrated into mixed schedules is derived from a compromise between the results from steps 2, the impact of GENESIS on VGOS, and 3, the estimated frame tie accuracy. On the one hand, GENESIS ideally does not degrade the estimation of geodetic parameters. A low repetition rate for GENESIS scans leads to larger numbers of observations of geodetic sources. On the other hand the GENESIS mission and its goals are supported by performing large numbers of VLBI observations of the satellite. A high repetition rate might be required to do so. From the resulting optimal scan repetition, we derive valid estimates for the expected numbers of scans and observations of GENESIS in real experiments. A scan refers to the time period during which multiple VLBI antennas observe the same radio source. An observation refers to the measured delay observable from a single baseline pair of VLBI antennas from a scan.
In step 4, we investigate the expected frame tie accuracy over an extended period of time. The optimal scheduling weight factors and the optimal scan repetition for GENESIS are used to generate mixed schedules for several months of VGOS operations. Here, we take into account the expected cadence of two to three 24 h VGOS experiments per week for the launch year of GENESIS in 2028. The normal equations of the simulated 24 h sessions are stacked and solved for the VLBI station position. These estimates are a measure of the expected frame tie accuracy over a period of up to 12 months of VGOS experiments.
Processing Strategies
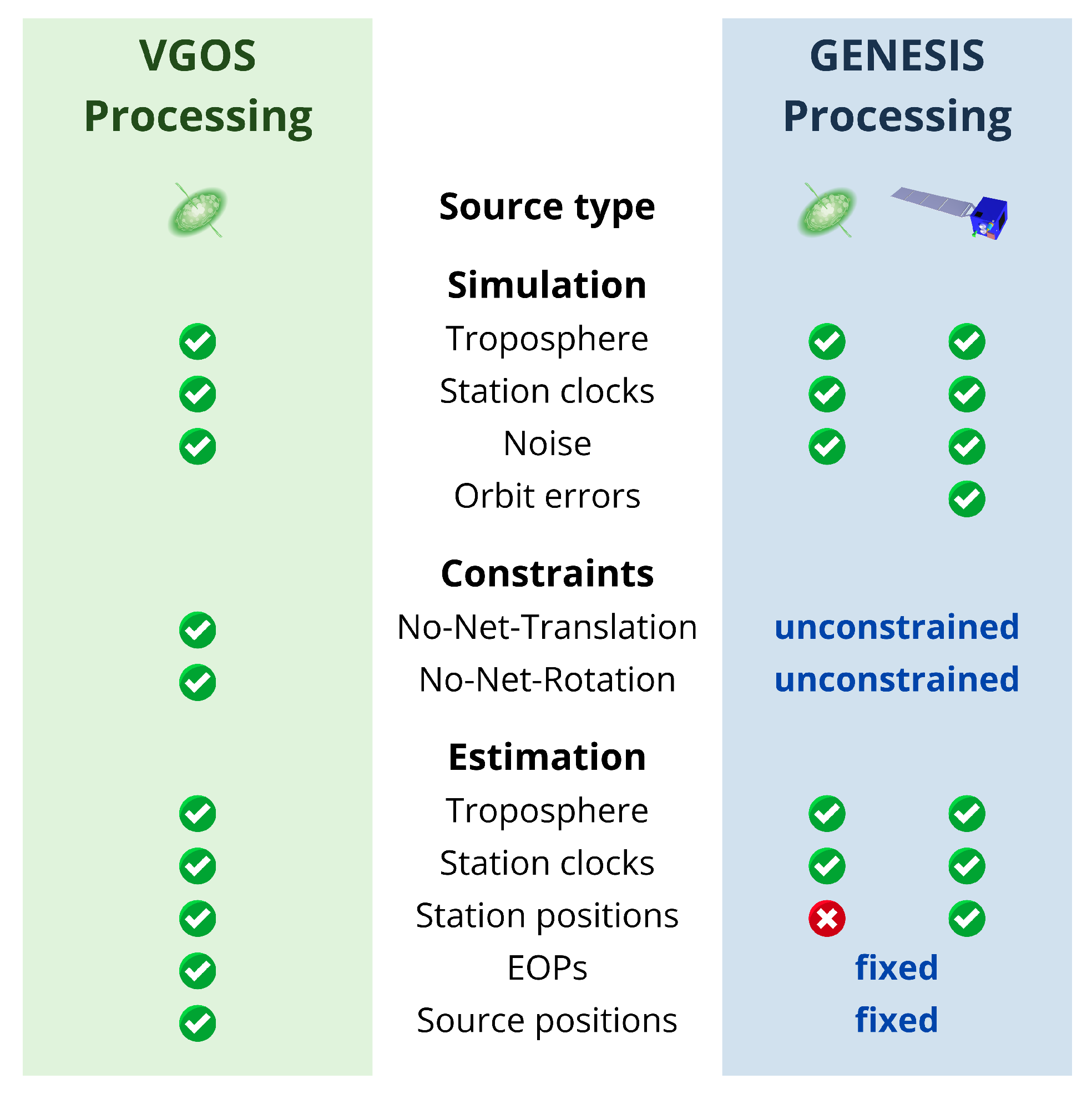
In this work, we utilize two processing strategies contrasted in
Figure 3. The simulation and estimation of geodetic parameters from observations of geodetic sources performed in steps 1 and 2 follow the VGOS Processing. The simulation and estimation of the frame tie from observations of GENESIS performed in steps 3 and 4 follow the GENESIS Processing.
VGOS Processing represents the standard procedure for geodetic VLBI simulations. Only observations of geodetic sources are considered. The observations are simulated including tropospheric turbulence, clock inaccuracies, and measurement noise. To solve the rank deficiency in the normal equations datum constraints are necessary. We apply a no-net-translation (NNT) and a no-net-rotation (NNR) constraint. The estimation of the parameters is performed in a least squares fit. The quality of the schedule is evaluated by the precision of the estimates of station positions and EOPs. Tropospheric delays and station clocks are estimated as a by-product. This procedure is well established and has been used in several previous studies, such as Petrachenko et al. [
20], Pany et al. [
24], Schartner and Böhm [
23], and Schartner et al. [
25].
GENESIS Processing represents a procedure for the evaluation of inter-technique frame ties. Observations of both geodetic sources and GENESIS are considered. Again, the observations are modeled with errors for tropospheric turbulence, clock inaccuracies, and measurement noise. Additionally, orbit errors are simulated for GENESIS. No NNT or NNR constraints are used. The VLBI station positions are estimated only from observations of GENESIS. Observations of geodetic sources are used to improve the estimation of the troposphere and the station clocks. EOPs and geodetic source positions are fixed because we assume that they can be derived with high accuracy following the VGOS Processing strategy. We do not perform an orbit determination for GENESIS. The concept of the GENESIS Processing strategy was applied to the simulation of VLBI observations of satellites in recent studies by Wolf and Böhm [
16] and Schunck et al. [
13].
5. Discussion
This study investigates the integration of VLBI observations with the upcoming ESA mission GENESIS into VGOS operations. The results demonstrate that the negative impact of GENESIS on the precision of geodetic parameter estimates is minimal. These findings are consistent with those of previous simulation studies that incorporated additional artificial radio sources into VLBI experiments [
18,
34]. The results presented herein provide further enhancement to the findings of previous studies by implementing the planned GENESIS orbit parameters, utilizing both the current and projected VGOS antenna networks, and conducting comprehensive scheduling. In contrast to prior studies, this investigation addresses the trade-off between the negative impact of GENESIS on geodetic parameter estimates and the estimated frame tie accuracy between the VLBI and GENESIS frames. The findings suggest integrating GENESIS into VGOS schedules with MRTs of at least 5 min. As a result, the degradation of the station position and dUT1 repeatabilities are less than
mm and
s, respectively. Furthermore, the number of observations is reduced by less than
. A comparison is presented between the degradation of the parameters due to GENESIS and the variation within the VGOS schedule optimization. It was demonstrated that no single schedule provides the best estimates for all geodetic parameters. Rather, each schedule shows strengths in the estimation of different parameters. It was found that the geodetic parameter estimates exhibited a variation of between
and
among the best-tested schedules. In comparison, the change in the station position and dUT1 estimation due to GENESIS is less than
and
, respectively, while the impact of GENESIS on VGOS schedules is not negligible, especially considering the decrease in the number of observations; the results suggest that GENESIS can be included into regular VGOS experiments.
A significant aspect of this work is the application of comprehensive scheduling. We utilized the well-established scheduling software VieSched++. The software assesses the anticipated orbit of GENESIS and creates realistic observability with the global antenna network. With an MRT of 5 min, the mixed schedules comprise about 150 to 200 scans and about 1000 to 5000 observations of GENESIS, depending on the VGOS network. In this study, we present the first numbers of scans and observations of GENESIS with current and projected VGOS networks that are based on profound scheduling. The given numbers in this work can contribute to further studies by other groups within the geodetic community in preparation for the GENESIS mission.
We employed a two-step approach to establish the frame tie between the VLBI and GENESIS frames. In the first step, the GENESIS orbit is determined with satellite-based techniques. In the second step, VLBI observations with VGOS networks serve to establish a tie between the two frames. The results indicate that the frame tie can be achieved with an accuracy of several millimeters after a few months of observations. After 12 months of experiments with GENESIS for all three networks, a frame tie can be achieved with an accuracy of 2–4 mm, assuming orbit errors of 5 cm and a session cadence of three experiments per week. A cadence of two experiments per week results in a decrease in frame tie accuracy to approximately 3–5 mm. As expected, the results improve further when assuming smaller orbit errors of 3 cm or 1 cm. However, these values warrant cautious interpretation. The modeling of orbit errors applied in this work is simplified. The errors are derived from disturbances at the level of orbital elements, rather than from the forces acting on the satellite. Consequently, they may not fully reflect the anticipated errors for real observations. Therefore, our simulations should be regarded as lower limits.
We perform frame tie realization from a VLBI perspective. The simulations presented here reflect standard practices for VLBI simulation studies. It should be noted, however, that the displayed frame tie realization based on a two-step approach represents merely one possible method of combining the space geodetic techniques via the GENESIS satellite. At this stage, several working groups are engaged in conceptualizing an optimal strategy for rigorously combining and commonly analyzing observations of the four space geodetic techniques at the observation level. Prior research has demonstrated that VLBI has the potential to contribute to the orbit determination of satellites equipped with VLBI transmitters (e.g., [
18,
31]). Consequently, VLBI observations of GENESIS could play a significant role in the satellite’s orbit determination.
For observations of geodetic sources, we assume scan lengths of 30 s, as this is the common practice currently employed in VGOS experiments. However, VGOS operations are still developing and the implementation of adaptive scan lengths could reduce the duration antennas observe each source. Theoretically, scan lengths of 10 s or less are feasible with VGOS. Shorter scan lengths would increase the number of scans of geodetic sources in between GENESIS scans while maintaining unchanged MRTs. This could further decrease the impact of GENESIS on VGOS operations. Another aspect of VGOS that could develop more significance in the future is the concept of twin telescopes. At present, the three space geodetic observatories in Ny-Ålesund, Onsala, and Wettzell are equipped with twin telescopes. The advantages are obtained by assuming that the tropospheric activity above the two antennas is identical and that they are connected to the same clock. An additional observing mode inherent to twin telescopes is multidirectional observing, whereby the two antennas point in different directions to observe different sources. In this way, each antenna is part of a different subnetwork. The advantage of this observing mode for observations of VLBI transmitters on board satellites, such as GENESIS, is that geodetic sources can be observed with no interruptions. With regard to GENESIS, the signal characteristics are currently the subject of discussion. Consequently, the signal-to-noise ratio, scan length, and precision of actual observations of GENESIS may deviate from the assumptions presented in this study.
Prior to the launch of GENESIS in 2028, the VLBI technique still requires further development in the processing of observations of near-field targets to actually support the mission with dedicated VLBI observations [
35]. In particular, the generation of the schedule files and station-specific control files need to be modified to seamlessly implement satellites in experiments with geodetic sources. Furthermore, due to the lack of tracking support of the antenna control units, some antennas are unable to continuously track GENESIS across the sky. Instead, stepwise or static tracking could be viable alternatives that require further investigation. These adjustments primarily necessitate software changes rather than hardware updates.
In this study, we limited our analysis to VLBI observations of GENESIS with VGOS networks. It is intended that the legacy S/X network will continue its operations with the weekly R1 and R4 experiments, thus maintaining the time series of observations. By additionally integrating GENESIS in these experiments, the legacy antenna network can contribute with observations of be tied to the GENESIS frame and contribute to a common analysis of VLBI and the other space geodetic techniques. Typically legacy antennas exhibit slower slew speeds in comparison to VGOS antennas. This could result in a reduced number of scans of geodetic sources in between scans of GENESIS, which could in turn lead to a larger degradation of geodetic parameter estimates.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}