
Real-Time Detection and Correction of Abnormal Errors in GNSS Observations on Smartphones


Abstract

1. Introduction
2. Methods
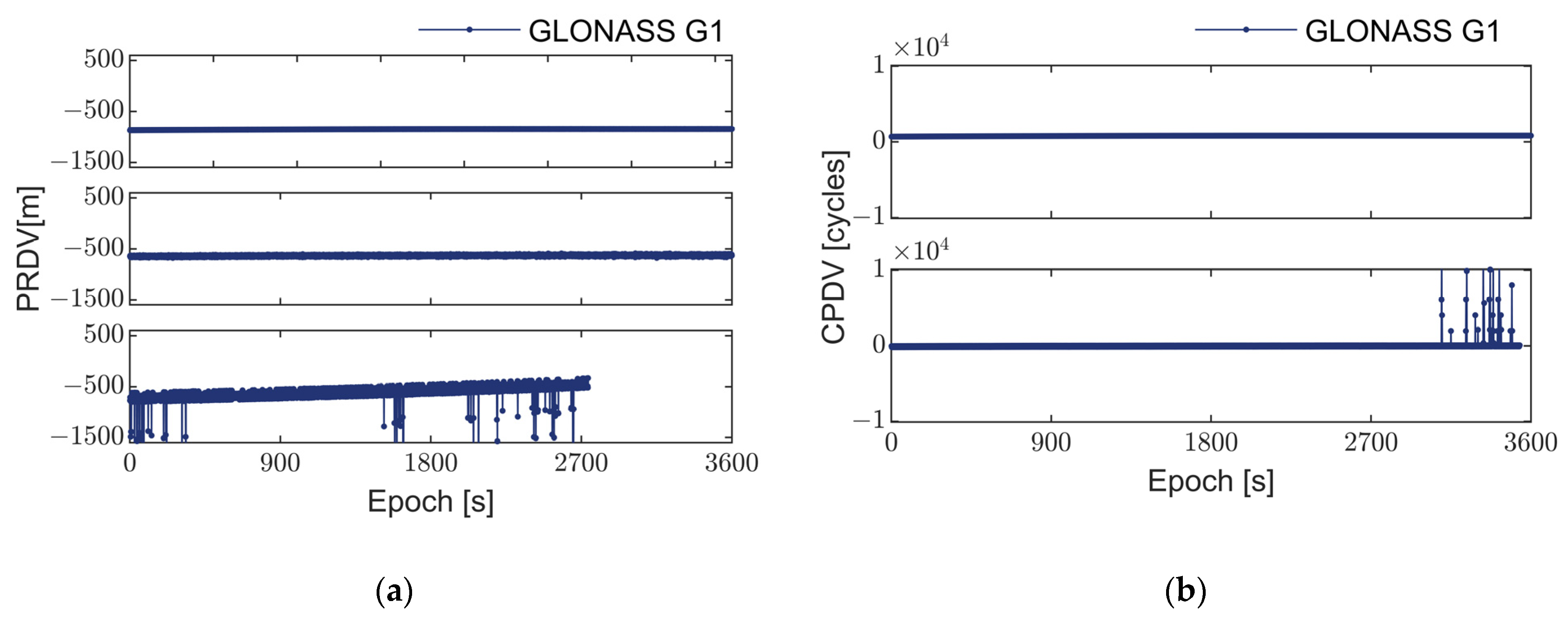
2.1. Analysis of Abnormal Errors in Smartphone Pseudorange/Carrier Measurements
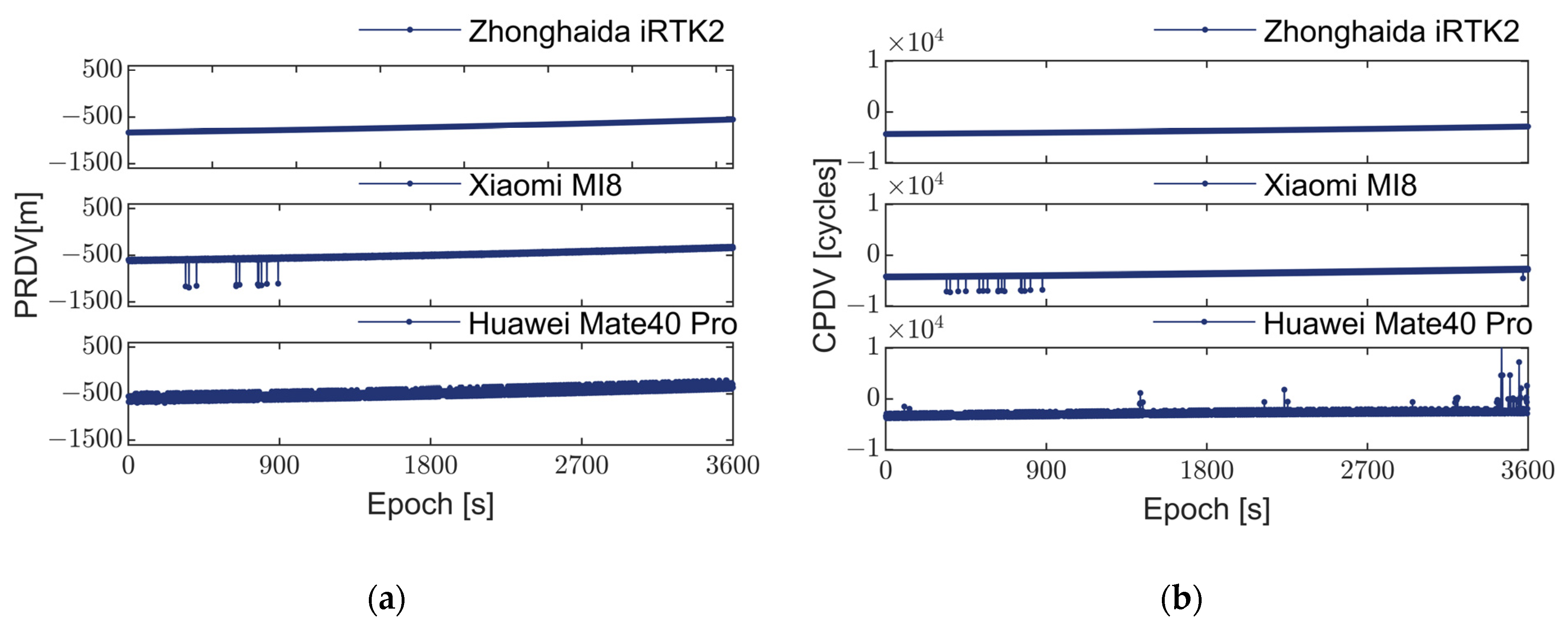
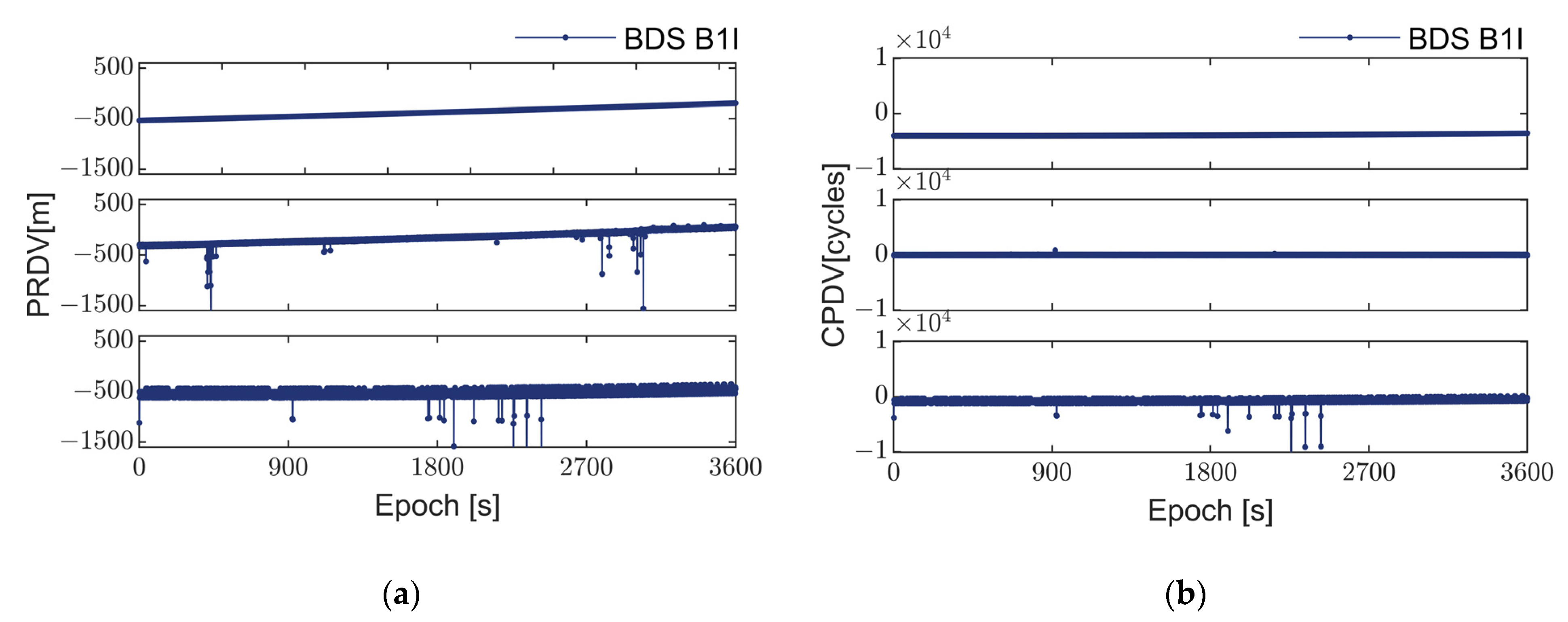
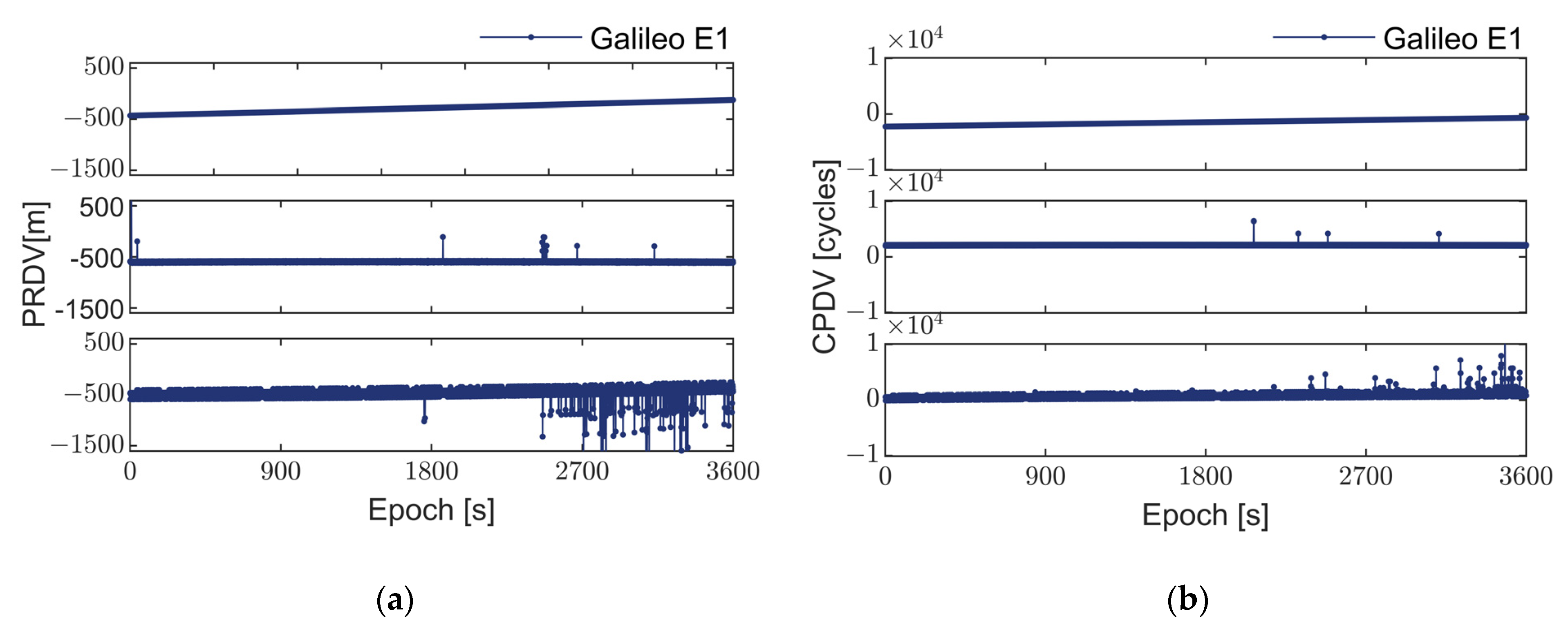
2.1.1. Analysis of Abnormal Errors in Land Pseudorange/Carrier Measurements
2.1.2. Analysis of Abnormal Errors in Water Pseudorange/Carrier Measurements
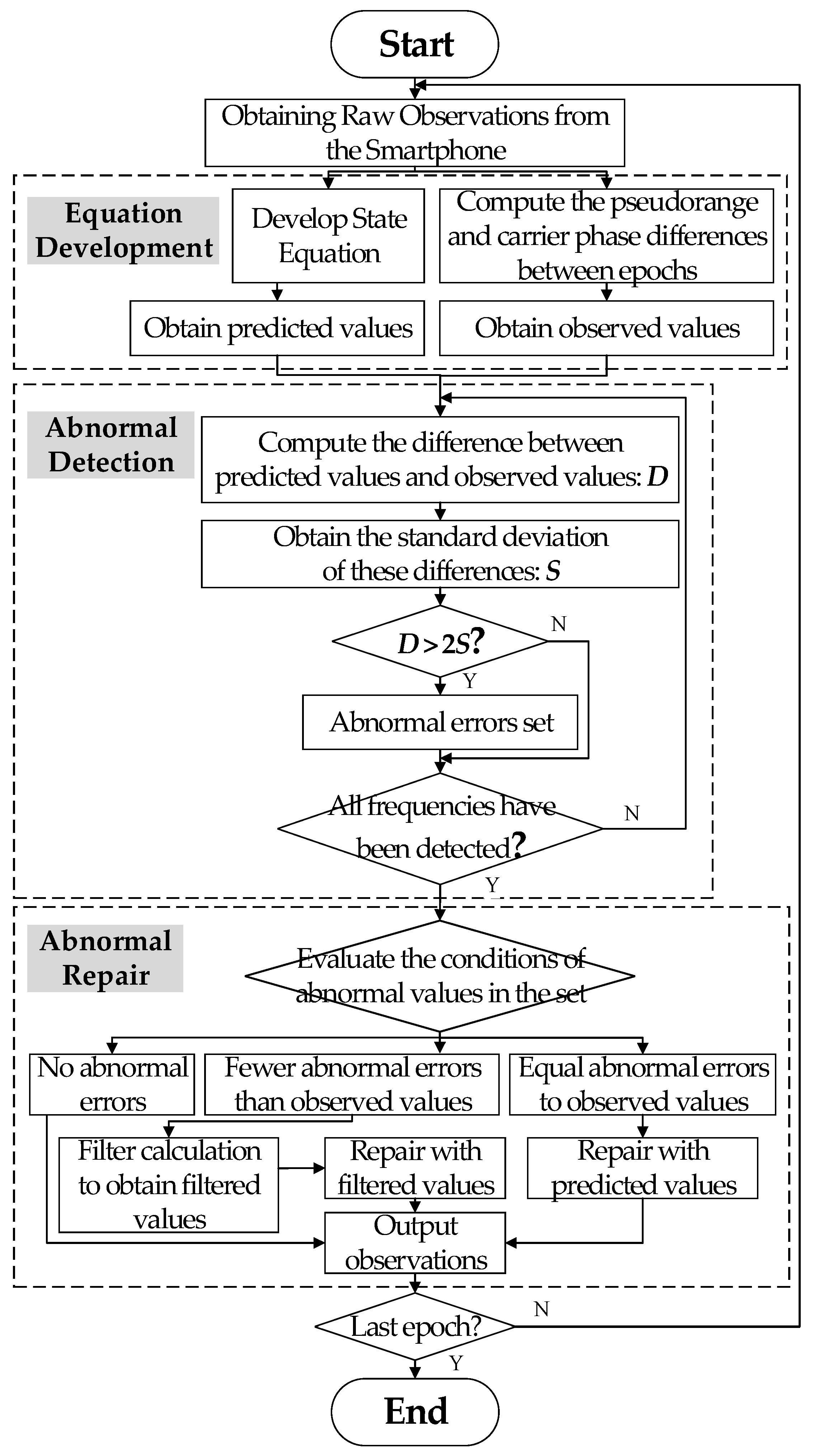
2.2. Design of Detection and Repair Solutions
2.2.1. Establishment of State Equations
2.2.2. Establishment of Observation Equations
2.2.3. Abnormal Detection Solution Computation
2.2.4. Abnormal Repair Solution Computation
- Equation establishment: The smartphone observation values are used to compute epoch-to-epoch differences, resulting in single-differenced observation values. These are used to establish the observation equations. The state vector includes the satellite-to-ground distance, rate of change, and acceleration, forming the system state equation;
- Anomaly detection computation: After determining the initial values and variances of the system state, Kalman filtering is employed to predict the satellite-to-ground distance. Differences between predicted values and pseudorange and carrier observation values for each epoch are calculated alongside their standard deviations. The standard deviation multiplied by two serves as the threshold to ascertain whether the differences exceed acceptable limits;
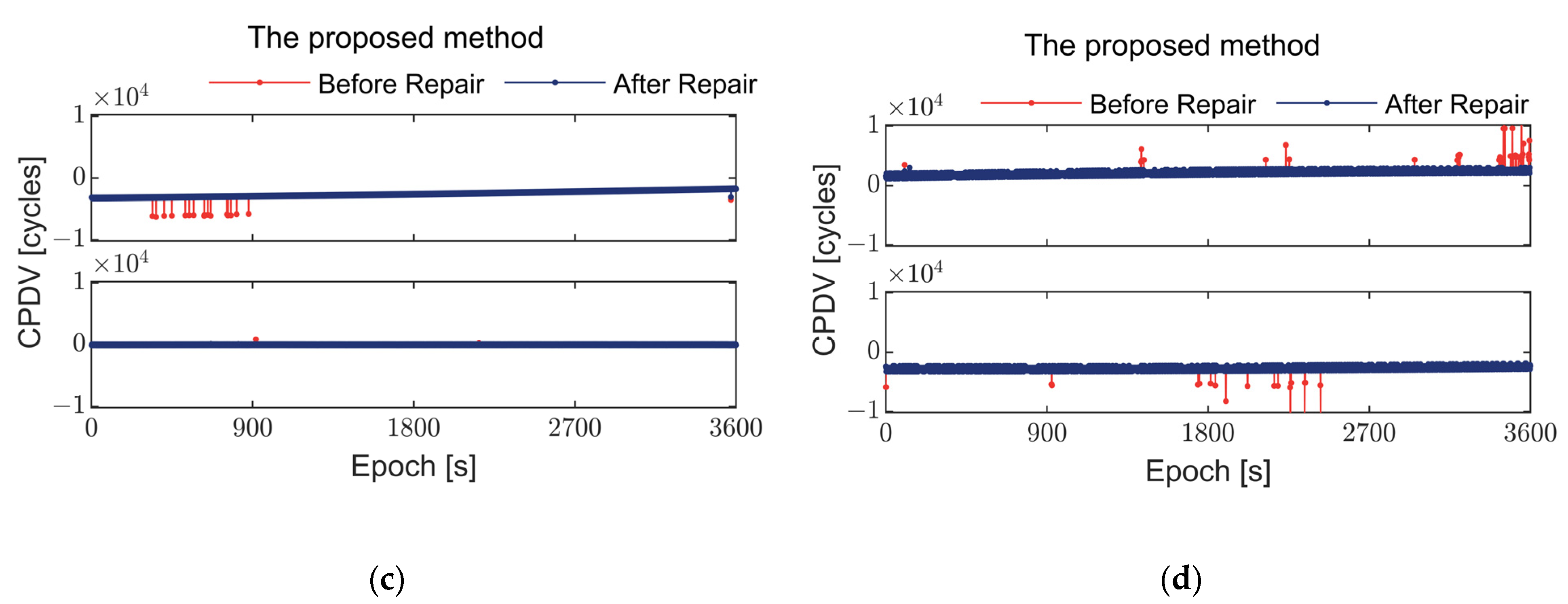
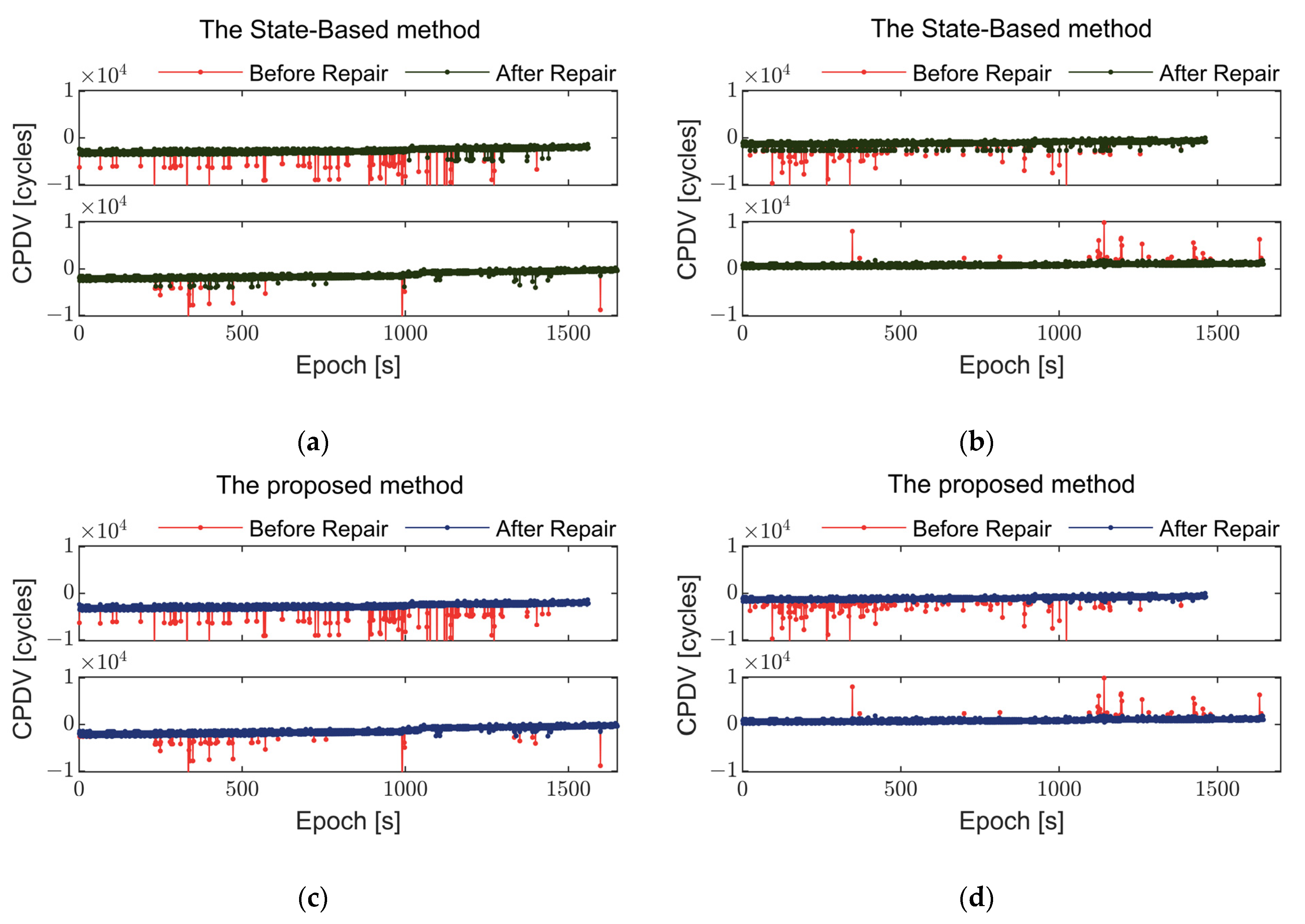
- Anomaly repair computation: Based on the anomalies identified in the second step, three scenarios are considered. First, if no abnormalities are detected in the epoch, the original observation values are directly output without any alterations. Second, if abnormalities are present in some observations within the epoch, normal observations are used to establish observation equations for subsequent Kalman filtering. The resultant filtered values replace the abnormal observations to rectify errors. Third, if all observations within the epoch exhibit abnormalities, predicted values replace the observations to rectify errors.
3. Results
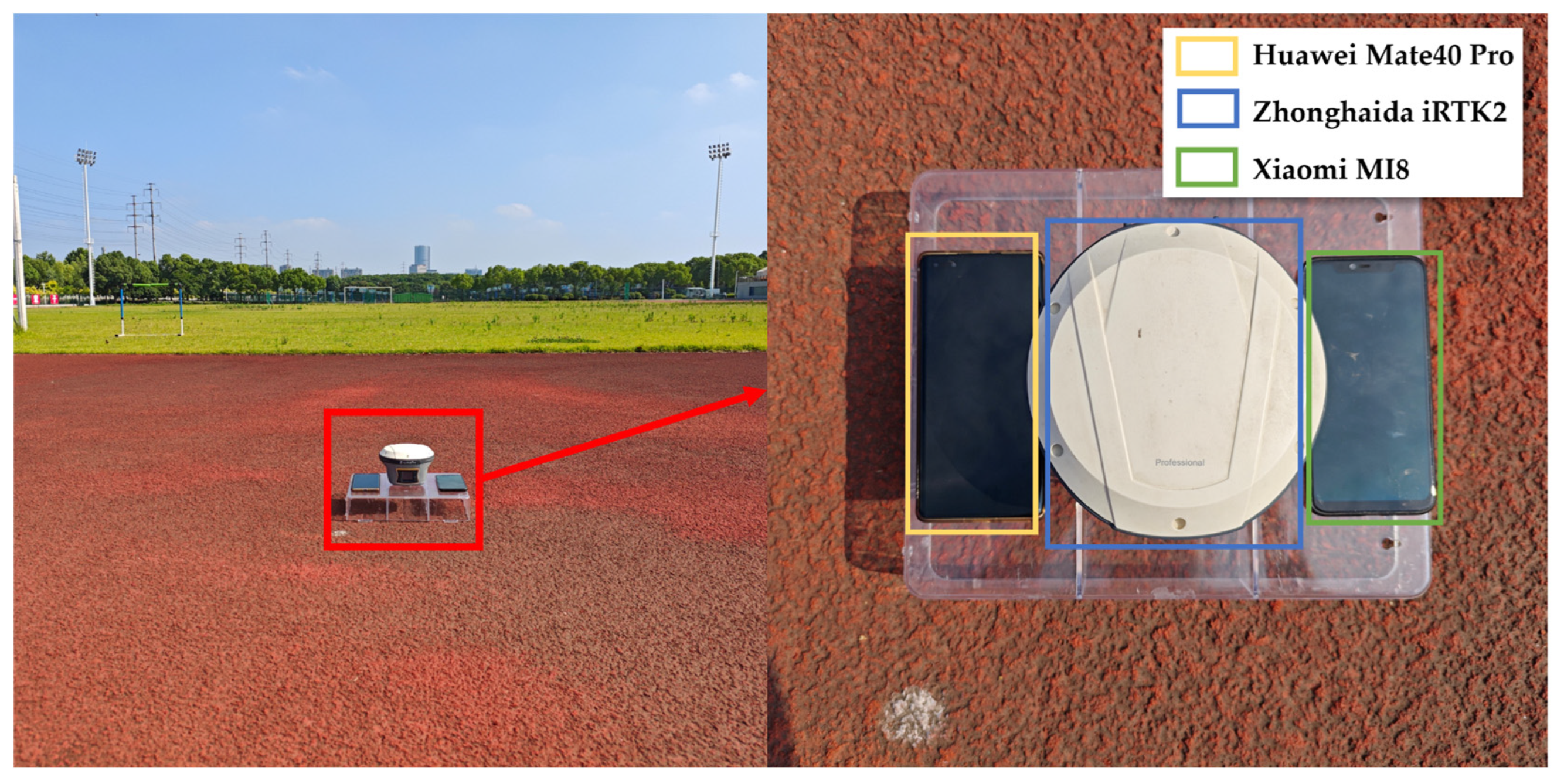
3.1. Experimental Description
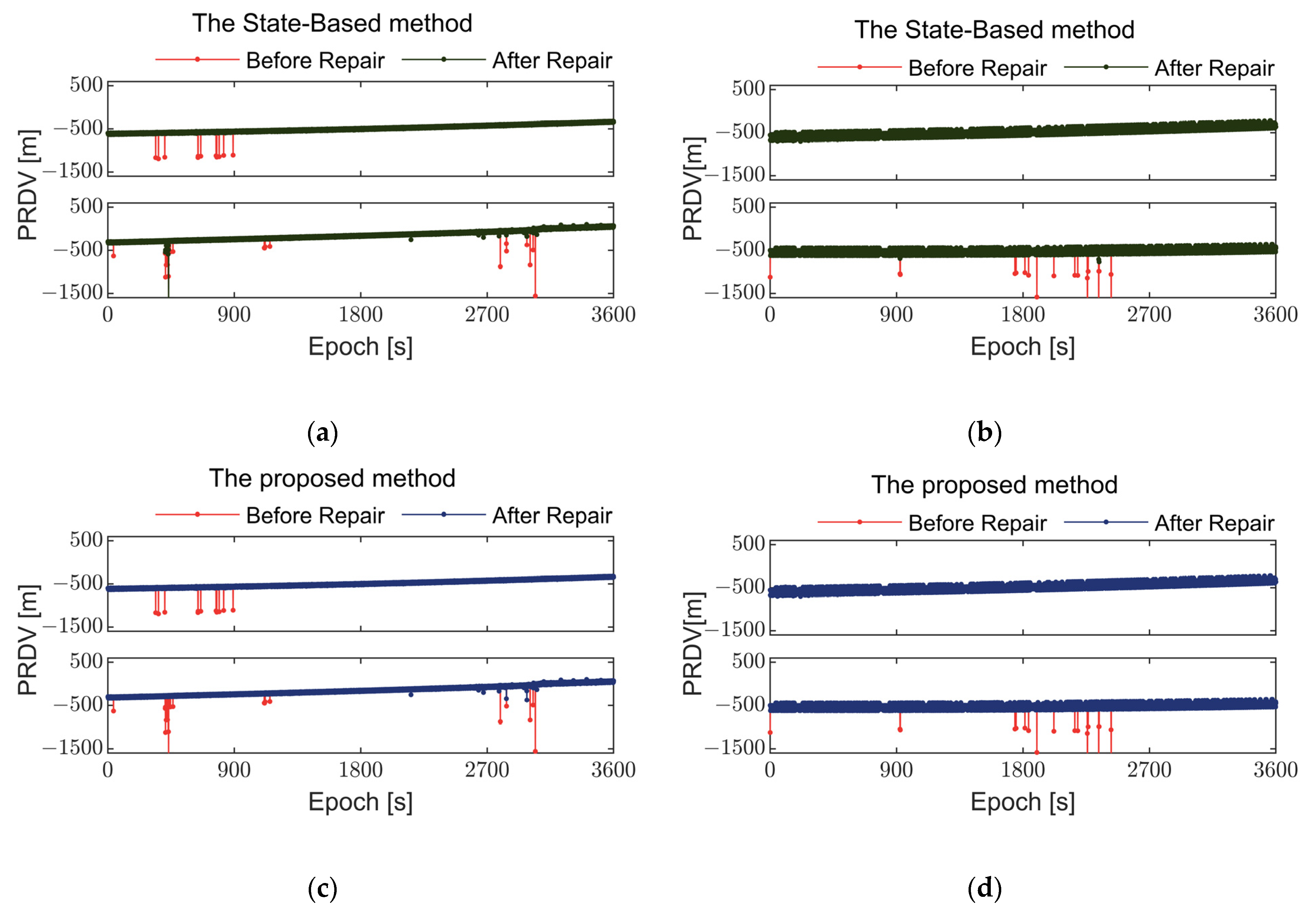
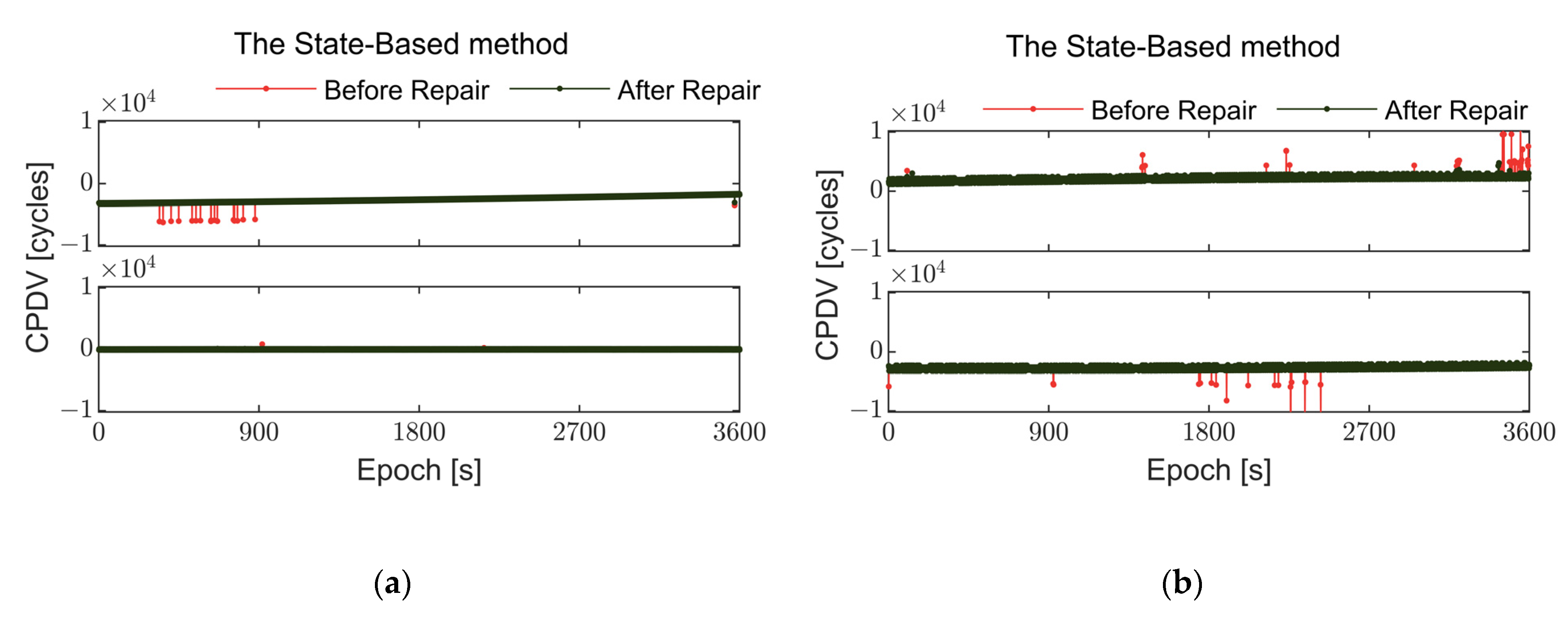
3.2. Performance Analysis of Detection and Repair Methods
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Bahadur, B. A Study on the Real-Time Code-Based GNSS Positioning with Android Smartphones. Measurement 2022, 194, 111078. [Google Scholar] [CrossRef]
- Li, B.; Miao, W.; Chen, G.; Li, Z. Ambiguity Resolution for Smartphone GNSS Precise Positioning: Effect Factors and Performance. J. Geod. 2022, 96, 63. [Google Scholar] [CrossRef]
- Paziewski, J.; Fortunato, M.; Mazzoni, A.; Odolinski, R. An Analysis of Multi-GNSS Observations Tracked by Recent Android Smartphones and Smartphone-Only Relative Positioning Results. Measurement 2021, 175, 109162. [Google Scholar] [CrossRef]
- Wang, L.; Li, Z.; Wang, N.; Wang, Z. Real-Time GNSS Precise Point Positioning for Low-Cost Smart Devices. GPS Solut. 2021, 25, 69. [Google Scholar] [CrossRef]
- Yun, J.; Lim, C.; Park, B. Inherent Limitations of Smartphone GNSS Positioning and Effective Methods to Increase the Accuracy Utilizing Dual-Frequency Measurements. Sensors 2022, 22, 9879. [Google Scholar] [CrossRef]
- Aggrey, J.; Bisnath, S.; Naciri, N.; Shinghal, G.; Yang, S. Multi-GNSS Precise Point Positioning with next-Generation Smartphone Measurements. J. Spat. Sci. 2020, 65, 79–98. [Google Scholar] [CrossRef]
- Zhang, X.; Tao, X.; Zhu, F.; Shi, X.; Wang, F. Quality Assessment of GNSS Observations from an Android N Smartphone and Positioning Performance Analysis Using Time-Differenced Filtering Approach. GPS Solut. 2018, 22, 70. [Google Scholar] [CrossRef]
- Shinghal, G.; Bisnath, S. Conditioning and PPP Processing of Smartphone GNSS Measurements in Realistic Environments. Satell. Navig. 2021, 2, 10. [Google Scholar] [CrossRef]
- Weng, D.; Hou, Z.; Meng, Y.; Cai, M.; Chan, Y. Characterization and Mitigation of Urban GNSS Multipath Effects on Smartphones. Measurement 2023, 223, 113766. [Google Scholar] [CrossRef]
- Peng, Z.; Gao, Y.; Gao, C.; Shang, R.; Gan, L. Improving Smartphone GNSS Positioning Accuracy Using Inequality Constraints. Remote Sens. 2023, 15, 2062. [Google Scholar] [CrossRef]
- Liu, W.; Li, J.; Zeng, Q.; Guo, F.; Wu, R.; Zhang, X. An Improved Robust Kalman Filtering Strategy for GNSS Kinematic Positioning Considering Small Cycle Slips. Adv. Space Res. 2019, 63, 2724–2734. [Google Scholar] [CrossRef]
- Li, Z.; Wang, L.; Wang, N.; Li, R.; Liu, A. Real-Time GNSS Precise Point Positioning with Smartphones for Vehicle Navigation. Satell. Navig. 2022, 3, 19. [Google Scholar] [CrossRef]
- Lachapelle, G.; Gratton, P.; Horrelt, J.; Lemieux, E.; Broumandan, A. Evaluation of a Low Cost Hand Held Unit with GNSS Raw Data Capability and Comparison with an Android Smartphone. Sensors 2018, 18, 4185. [Google Scholar] [CrossRef] [PubMed]
- Paziewski, J.; Sieradzki, R.; Baryla, R. Signal Characterization and Assessment of Code GNSS Positioning with Low-Power Consumption Smartphones. GPS Solut. 2019, 23, 98. [Google Scholar] [CrossRef]
- Pesyna, K.M.; Heath, R.W.; Humphreys, T.E. Centimeter Positioning with a Smartphone-Quality GNSS Antenna. In Proceedings of the 27th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2014), Tampa, FL, USA, 8–12 September 2014. [Google Scholar]
- Geng, J.; Jiang, E.; Li, G.; Xin, S.; Wei, N. An Improved Hatch Filter Algorithm towards Sub-Meter Positioning Using Only Android Raw GNSS Measurements without External Augmentation Corrections. Remote Sens. 2019, 11, 1679. [Google Scholar] [CrossRef]
- Kirkko-Jaakkola, M.; Söderholm, S.; Honkala, S.; Koivula, H.; Nyberg, S.; Kuusniemi, H. Low-Cost Precise Positioning Using a National GNSS Network. In Proceedings of the 28th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2015), Tampa, FL, USA, 14–18 September 2015. [Google Scholar]
- Zabala Haro, M.; Martín Furones, Á.; Anquela Julián, A.; Jiménez-Martínez, M.J. Comprehensive Analysis of Xiaomi Mi 8 GNSS Antenna Performance. Sensors 2024, 24, 2569. [Google Scholar] [CrossRef]
- Tomaštík, J.; Chudá, J.; Tunák, D.; Chudý, F.; Kardoš, M. Advances in Smartphone Positioning in Forests: Dual-Frequency Receivers and Raw GNSS Data. For. Int. J. For. Res. 2021, 94, 292–310. [Google Scholar] [CrossRef]
- Gao, H.; Groves, P.D. Environmental Context Detection for Adaptive Navigation Using GNSS Measurements from a Smartphone: Environment Detection Using GNSS Measurements. J. Inst. Navig. 2018, 65, 99–116. [Google Scholar] [CrossRef]
- Tomaštík, J., Jr.; Tomaštík, J., Sr.; Saloň, Š.; Piroh, R. Horizontal Accuracy and Applicability of Smartphone GNSS Positioning in Forests. For. Int. J. For. Res. 2017, 90, 187–198. [Google Scholar] [CrossRef]
- Angrisano, A.; Gaglione, S. Smartphone GNSS Performance in an Urban Scenario with RAIM Application. Sensors 2022, 22, 786. [Google Scholar] [CrossRef]
- Ch, V.R.; Alekhya, N.L.; Rahaman, M.M.; Imran, M.; Pujasri, K.; Killamsetti, H.K. Analyzing Multipath Fading in Deep Water Through Signal to Noise Ratio. In Proceedings of the 2024 International Conference on Integrated Circuits and Communication Systems (ICICACS), Raichur, India, 23 February 2024; pp. 1–4. [Google Scholar]
- Tranquilla, J.M.; Carr, J.P. GPS Multipath Field Observations at Land and Water Sites. Navigation 1990, 37, 393–414. [Google Scholar] [CrossRef]
- Zangenehnejad, F.; Gao, Y. GNSS Smartphones Positioning: Advances, Challenges, Opportunities, and Future Perspectives. Satell. Navig. 2021, 2, 24. [Google Scholar] [CrossRef] [PubMed]
- Paziewski, J. Recent Advances and Perspectives for Positioning and Applications with Smartphone GNSS Observations. Meas. Sci. Technol. 2020, 31, 091001. [Google Scholar] [CrossRef]
- Specht, C.; Dabrowski, P.S.; Pawelski, J.; Specht, M.; Szot, T. Comparative Analysis of Positioning Accuracy of GNSS Receivers of Samsung Galaxy Smartphones in Marine Dynamic Measurements. Adv. Space Res. 2019, 63, 3018–3028. [Google Scholar] [CrossRef]
- Bai, T.; Chai, H.; Wang, M.; Tian, X.; Du, Z.; Zhang, F. Analysis of GNSS Data Quality and Dynamic Positioning Assessment on Smartphones at Sea. Hydrogr. Surv. Mapp. 2022, 42, 42–47. [Google Scholar]
- Robustelli, U.; Paziewski, J.; Pugliano, G. Observation Quality Assessment and Performance of GNSS Standalone Positioning with Code Pseudoranges of Dual-Frequency Android Smartphones. Sensors 2021, 21, 2125. [Google Scholar] [CrossRef]
- Pan, C.; Li, Z.; Zhang, Q.; Soja, B.; Gao, J. Smartphone-Based Vision/MEMS-IMU/GNSS Tightly Coupled Seamless Positioning Using Factor Graph Optimization. Measurement 2024, 229, 114420. [Google Scholar] [CrossRef]
- Blewitt, G. An Automatic Editing Algorithm for GPS Data. Geophys. Res. Lett. 1990, 17, 199–202. [Google Scholar] [CrossRef]
- Zhang, X.; He, X.; Liu, W. Characteristics of Systematic Errors in the BDS Hatch–Melbourne–Wübbena Combination and Its Influence on Wide-Lane Ambiguity Resolution. GPS Solut. 2017, 21, 265–277. [Google Scholar] [CrossRef]
- Li, Y.G. Zuofa Cycle Slip Detection and Ambiguity Resolution Algorithms for Dual-Frequency GPS Data Processing. Mar. Geod. 1999, 22, 169–181. [Google Scholar] [CrossRef]
- Li, W.; Song, J.; Li, J.; Zhu, X. Improving GNSS Positioning Performance of Android Smart Devices by a Novel Pseudorange Correction Method. Meas. Sci. Technol. 2023, 34, 045010. [Google Scholar] [CrossRef]
- Li, M.; Huang, T.; Li, W.; Zhao, Q.; Jiang, K. Precise Point Positioning with Mixed Single- and Dual-Frequency GNSS Observations from Android Smartphones Considering Code-Carrier Inconsistency. Adv. Space Res. 2023, 74, 2664–2679. [Google Scholar] [CrossRef]
- Li, G.; Geng, J. Characteristics of Raw Multi-GNSS Measurement Error from Google Android Smart Devices. GPS Solut. 2019, 23, 90. [Google Scholar] [CrossRef]
- Chen, K.; Chang, G.; Chen, C.; Zhu, T. An Improved TDCP-GNSS/INS Integration Scheme Considering Small Cycle Slip for Low-Cost Land Vehicular Applications. Meas. Sci. Technol. 2021, 32, 055006. [Google Scholar] [CrossRef]
- Zhao, J.; Wang, J.; Han, H.; Jiang, T. A Study on the Model of Robust Fractional-Order Extended Kalman Filtering with Gross Error. GPS Solut. 2024, 28, 87. [Google Scholar] [CrossRef]
- Xia, S.; Yu, X. A GNSS Triple-Frequency Combination Cycle Slip Detection and Repair Method without Blind Spots. Sci. Surv. Mapp. 2020, 45, 62–69. [Google Scholar] [CrossRef]
- Sun, A.; Zhang, Q.; Yu, Z.; Meng, X.; Liu, X.; Zhang, Y.; Xie, Y. A Novel Slow-Growing Gross Error Detection Method for GNSS/Accelerometer Integrated Deformation Monitoring Based on State Domain Consistency Theory. Remote Sens. 2022, 14, 4758. [Google Scholar] [CrossRef]
- Gao, R.; Xu, L.; Zhang, B.; Liu, T. Raw GNSS Observations from Android Smartphones: Characteristics and Short-Baseline RTK Positioning Performance. Meas. Sci. Technol. 2021, 32, 084012. [Google Scholar] [CrossRef]
- Zangenehnejad, F.; Gao, Y. Quality Analysis of Smartphone Gnss Observations and Impact on Precise Positioning. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2023, 48, 1169–1177. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Receiver Models | GNSS Chipset Model | Tracked Satellite Systems | Supported Signal Frequencies |
|---|---|---|---|
| Zhonghaida iRTK2 | NovAtel OEM719 (2016) | GPS/GLONASS/Galileo/BDS/QZSS/WAAS/MSAS/EAGAN | GPS (L1 C/A, L2C, L5) GLONASS (G1, G2) Galileo (E1, E5a, E5b) BDS (B1I, B1C, B2a) |
| Xiaomi Mi 8 | Broadcom BCM47755 (2018) | GPS/GLONASS/Galileo/BDS/QZSS | GPS (L1 C/A, L5) GLONASS (G1) Galileo (E1, E5a) BDS (B1I) |
| Huawei Mate 40 Pro | Kirin 9000 integrated GNSS chipset (2020) | GPS/GLONASS/Galileo/BDS/QZSS/NavIC | GPS (L1 C/A, L5) GLONASS (G1) Galileo (E1, E5a) BDS (B1I, B1C, B2a, B2b) |
| Pseudorange Standard Deviation | Carrier Standard Deviation | ||||||
|---|---|---|---|---|---|---|---|
| Total Observation Epochs | Epochs with Abnormal Errors | Proportion | Total Observation Epochs | Epochs with Abnormal Errors | Proportion | ||
| Mi8 | GPS L1 | 4048 | 31 | 0.76% | 4032 | 57 | 1.41% |
| BDS B1 | 4077 | 164 | 4.02% | 3983 | 2 | 0.05% | |
| Galileo E1 | 4075 | 55 | 1.34% | 3997 | 11 | 0.28% | |
| GLONASS G1 | 4080 | 0 | 0.00% | 3865 | 82 | 2.12% | |
| Mate40 Pro | GPS L1 | 3596 | 0 | 0.00% | 3596 | 118 | 3.28% |
| BDS B1 | 4027 | 45 | 1.12% | 4027 | 27 | 0.67% | |
| Galileo E1 | 3838 | 297 | 7.74% | 3796 | 203 | 5.34% | |
| GLONASS G1 | 2740 | 189 | 6.90% | / | / | / | |
| Pseudorange Standard Deviation | Carrier Standard Deviation | ||||||
|---|---|---|---|---|---|---|---|
| Total Observation Epochs | Epochs with Abnormal Errors | Proportion | Total Observation Epochs | Epochs with Abnormal Errors | Proportion | ||
| Mi8 | GPS L1 | 2023 | 877 | 43.35% | 1561 | 612 | 39.21% |
| GPS L5 | 2052 | 22 | 1.02% | 1360 | 494 | 36.32% | |
| BDS B1I | 3013 | 221 | 7.33% | 1657 | 328 | 19.79% | |
| Mate40 Pro | GPS L1 | 2629 | 1021 | 38.84% | 1463 | 710 | 48.53% |
| GPS L5 | 2603 | 892 | 34.27% | 1610 | 432 | 26.83% | |
| BDS B1I | 2811 | 412 | 14.66% | 1645 | 128 | 7.78% | |
| BDS B1C | 2826 | 388 | 13.73% | 1071 | 31 | 2.89% | |
| Pseudorange Standard Deviation (m) | Carrier Standard Deviation (m) | ||||||
|---|---|---|---|---|---|---|---|
| Repair Method | Satellite Number | Before Repair | After Repair | Improvement | Before Repair | After Repair | Improvement |
| The proposed method | G02 | 34.157 | 17.679 | 48.29% | 39.345 | 17.529 | 55.41% |
| G09 | 46.742 | 35.352 | 24.36% | 59.036 | 36.221 | 38.65% | |
| G12 | 27.321 | 25.894 | 5.22% | 53.159 | 32.644 | 38.59% | |
| C01 | 54.792 | 20.581 | 62.52% | 13.742 | 13.506 | 1.72% | |
| C04 | 39.235 | 30.231 | 22.94% | 15.285 | 15.161 | 0.81% | |
| C15 | 64.238 | 27.346 | 57.46% | 37.761 | 33.288 | 11.85% | |
| E11 | 365.829 | 58.164 | 46.78% | 198.465 | 56.124 | 44.83% | |
| R05 | 168.432 | 50.387 | 46.19% | 130.762 | 53.124 | 45.03% | |
| The State-Based method | G02 | 34.157 | 18.972 | 44.46% | 39.345 | 18.918 | 51.95% |
| G09 | 46.742 | 35.944 | 23.12% | 59.036 | 38.023 | 35.60% | |
| G12 | 27.321 | 26.035 | 4.74% | 53.159 | 34.285 | 35.52% | |
| C01 | 54.792 | 22.263 | 59.38% | 13.742 | 13.522 | 1.58% | |
| C04 | 39.235 | 30.996 | 21.02% | 15.285 | 15.176 | 0.76% | |
| C15 | 64.238 | 29.672 | 53.81% | 37.761 | 33.724 | 10.69% | |
| E11 | 365.829 | 209.547 | 42.72% | 198.465 | 115.937 | 41.59% | |
| R05 | 168.432 | 98.272 | 41.66% | 130.762 | 77.329 | 40.87% | |
| Pseudorange Standard Deviation (m) | Carrier Standard Deviation (m) | ||||||
|---|---|---|---|---|---|---|---|
| Repair Method | Satellite Number | Before Repair | After Repair | Improvement | Before Repair | After Repair | Improvement |
| The proposed method | G02 | 50.353 | 50.353 | 0.00% | 95.392 | 50.756 | 46.82% |
| G09 | 47.742 | 31.263 | 34.55% | 91.254 | 41.865 | 54.13% | |
| G12 | 87.323 | 45.401 | 48.02% | 75.564 | 37.554 | 50.29% | |
| C01 | 92.090 | 50.205 | 45.50% | 91.351 | 49.866 | 45.42% | |
| C04 | 107.340 | 52.412 | 51.17% | 38.311 | 37.782 | 1.38% | |
| C15 | 91.234 | 40.413 | 55.72% | 122.306 | 57.247 | 53.20% | |
| E11 | 397.812 | 59.214 | 40.92% | 223.487 | 56.217 | 38.89% | |
| R05 | 154.892 | 47.238 | 33.98% | 117.348 | 50.174 | 34.27% | |
| The State-Based method | G02 | 50.353 | 50.353 | 0.00% | 95.392 | 56.173 | 41.12% |
| G09 | 47.742 | 33.041 | 30.79% | 91.254 | 47.548 | 47.90% | |
| G12 | 87.323 | 50.615 | 42.05% | 75.564 | 42.456 | 43.82% | |
| C01 | 92.090 | 54.885 | 40.41% | 91.351 | 54.814 | 40.00% | |
| C04 | 107.340 | 59.363 | 44.70% | 38.311 | 37.842 | 1.22% | |
| C15 | 91.234 | 46.372 | 49.18% | 122.306 | 64.938 | 46.91% | |
| E11 | 397.812 | 255.614 | 35.75% | 223.487 | 145.312 | 34.98% | |
| R05 | 154.892 | 108.626 | 29.88% | 117.348 | 81.523 | 30.53% | |
| Pseudorange Standard Deviation (m) | Carrier Standard Deviation (m) | ||||||
|---|---|---|---|---|---|---|---|
| Repair Method | Satellite Number | Before Repair | After Repair | Improvement | Before Repair | After Repair | Improvement |
| The proposed method | G04 | 512.000 | 87.895 | 82.81% | 401.611 | 54.118 | 86.61% |
| G05 | 173.341 | 51.287 | 70.42% | 240.025 | 40.598 | 83.08% | |
| G17 | 266.932 | 37.281 | 86.04% | 192.669 | 78.266 | 59.34% | |
| C07 | 106.402 | 44.599 | 58.11% | 169.804 | 61.962 | 63.52% | |
| C12 | 537.453 | 81.235 | 84.87% | 141.295 | 37.969 | 73.11% | |
| C22 | 311.510 | 67.359 | 78.39% | 186.350 | 60.866 | 67.38% | |
| E17 | 450.187 | 64.239 | 72.34% | 320.876 | 59.783 | 68.91% | |
| R22 | 251.476 | 52.831 | 61.27% | 183.945 | 53.928 | 61.89% | |
| The State-Based method | G04 | 512.000 | 132.132 | 74.19% | 401.611 | 96.793 | 75.90% |
| G05 | 173.341 | 83.811 | 51.65% | 240.025 | 86.085 | 64.14% | |
| G17 | 266.932 | 95.970 | 64.05% | 192.669 | 93.054 | 51.70% | |
| C07 | 106.402 | 61.515 | 42.19% | 169.804 | 93.117 | 45.17% | |
| C12 | 537.453 | 216.217 | 59.77% | 141.295 | 59.116 | 58.17% | |
| C22 | 311.510 | 130.773 | 58.02% | 186.350 | 83.764 | 55.05% | |
| E17 | 405.872 | 187.154 | 58.43% | 320.876 | 133.573 | 58.37% | |
| R22 | 487.234 | 136.869 | 45.58% | 183.945 | 99.119 | 46.12% | |
| Pseudorange Standard Deviation (m) | Carrier Standard Deviation (m) | ||||||
|---|---|---|---|---|---|---|---|
| Repair Method | Satellite Number | Before Repair | After Repair | Improvement | Before Repair | After Repair | Improvement |
| The proposed method | G04 | 418.108 | 50.213 | 88.04% | 194.363 | 55.726 | 71.40% |
| G05 | 511.642 | 70.885 | 86.11% | 377.612 | 59.233 | 84.29% | |
| G17 | 488.341 | 49.631 | 89.84% | 162.391 | 61.727 | 61.99% | |
| C07 | 131.039 | 59.004 | 55.00% | 103.877 | 49.199 | 52.61% | |
| C12 | 179.353 | 41.962 | 76.65% | 131.754 | 54.878 | 58.36% | |
| C22 | 611.274 | 39.741 | 93.47% | 209.375 | 80.168 | 61.72% | |
| E17 | 450.187 | 64.239 | 72.34% | 320.876 | 59.783 | 68.91% | |
| R22 | 251.476 | 52.831 | 61.27% | 183.945 | 53.928 | 61.89% | |
| The State-Based method | G04 | 418.108 | 116.083 | 72.24% | 194.363 | 89.453 | 53.98% |
| G05 | 511.642 | 160.752 | 68.58% | 377.612 | 165.104 | 56.28% | |
| G17 | 488.341 | 100.521 | 79.42% | 162.391 | 79.816 | 50.85% | |
| C07 | 131.039 | 78.654 | 39.98% | 103.877 | 63.817 | 38.57% | |
| C12 | 179.353 | 75.106 | 58.13% | 131.754 | 65.093 | 50.60% | |
| C22 | 611.274 | 134.967 | 77.92% | 209.375 | 116.212 | 44.50% | |
| E17 | 450.187 | 199.693 | 55.64% | 320.876 | 137.872 | 57.03% | |
| R11 | 251.476 | 116.422 | 53.70% | 183.945 | 86.707 | 52.87% | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mu, H.; Yu, X.; Aragon-Angel, A.; Wang, J.; Wu, Y. Real-Time Detection and Correction of Abnormal Errors in GNSS Observations on Smartphones. Remote Sens. 2024, 16, 3117. https://doi.org/10.3390/rs16173117
Mu H, Yu X, Aragon-Angel A, Wang J, Wu Y. Real-Time Detection and Correction of Abnormal Errors in GNSS Observations on Smartphones. Remote Sensing. 2024; 16(17):3117. https://doi.org/10.3390/rs16173117
Chicago/Turabian StyleMu, Hongbo, Xianwen Yu, Angela Aragon-Angel, Jiafu Wang, and Yanze Wu. 2024. "Real-Time Detection and Correction of Abnormal Errors in GNSS Observations on Smartphones" Remote Sensing 16, no. 17: 3117. https://doi.org/10.3390/rs16173117
APA StyleMu, H., Yu, X., Aragon-Angel, A., Wang, J., & Wu, Y. (2024). Real-Time Detection and Correction of Abnormal Errors in GNSS Observations on Smartphones. Remote Sensing, 16(17), 3117. https://doi.org/10.3390/rs16173117