



Mitigation of Suppressive Interference in AMPC SAR Based on Digital Beamforming


Abstract
1. Introduction
2. Signal Model and Reconstruction Principle
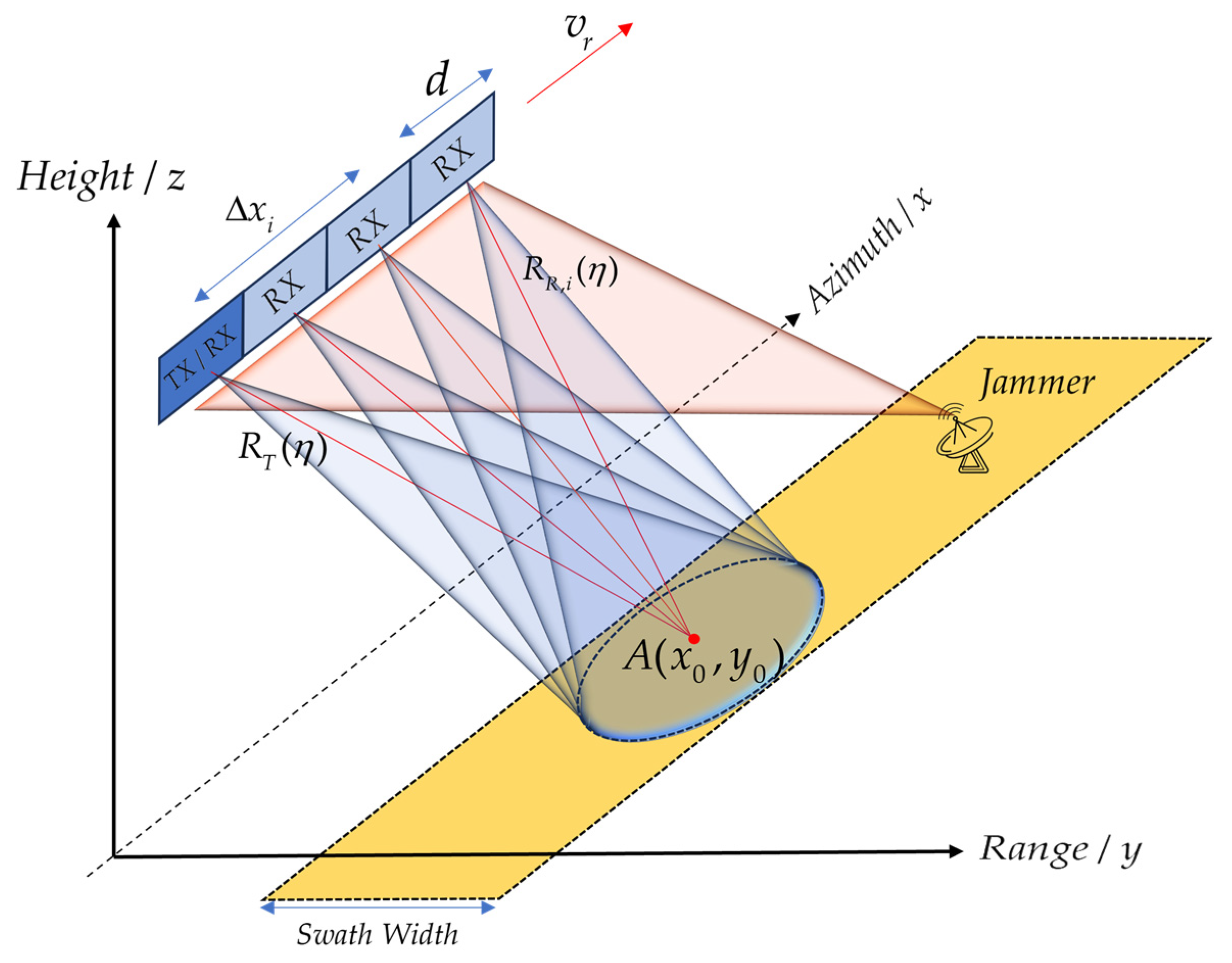
2.1. Signal Model
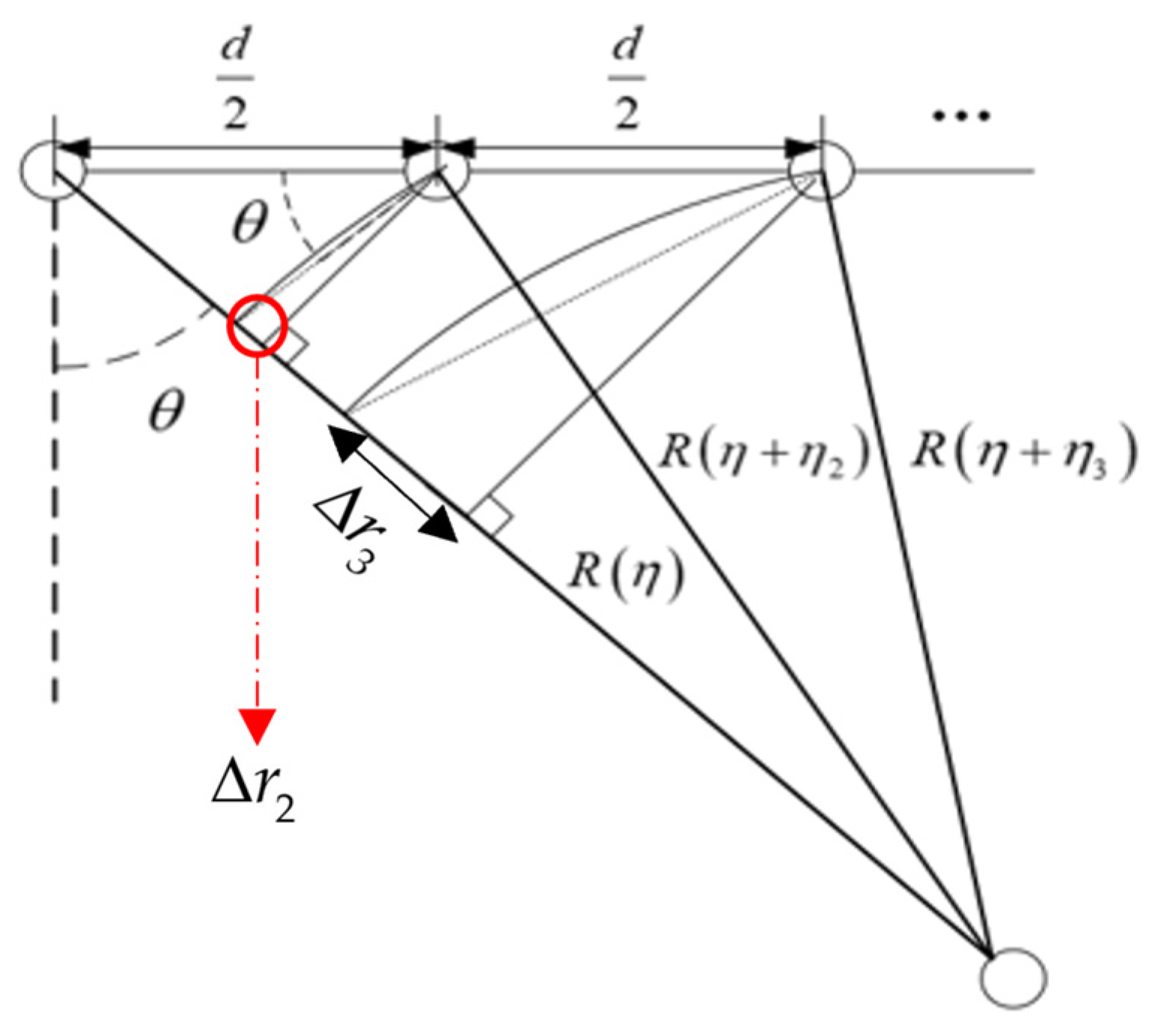
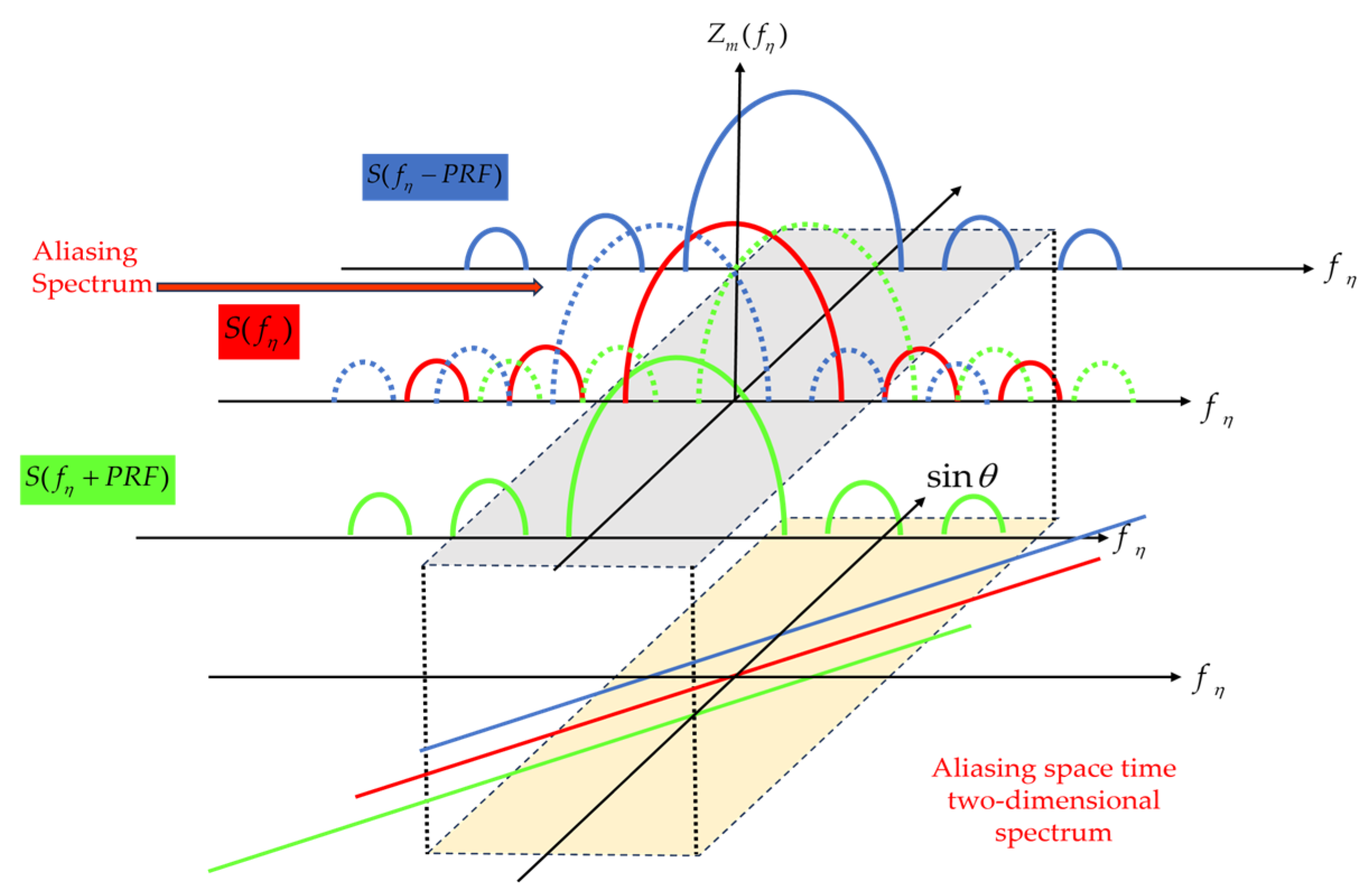
2.2. Principle of Azimuth Spectrum Reconstruction
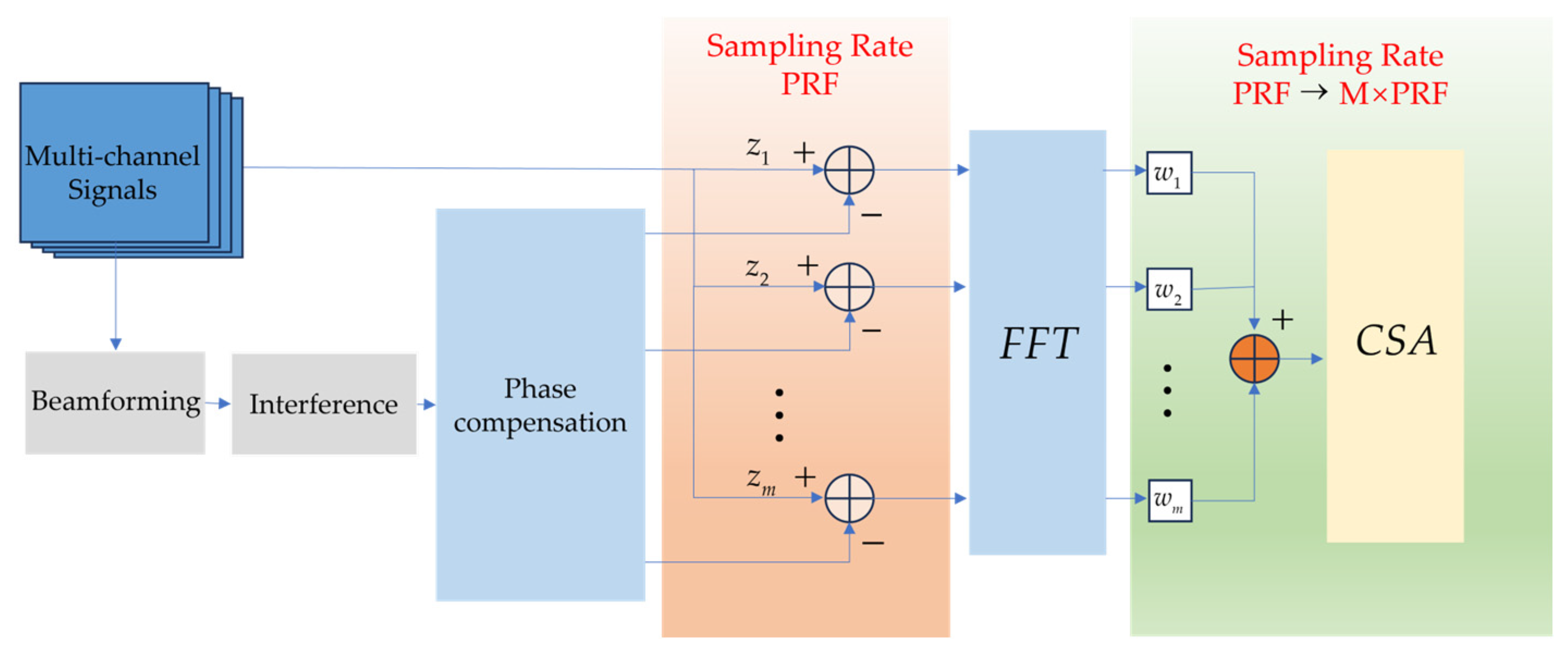
3. Interference Suppression Based on Digital Beamforming
3.1. Parameter Estimation
3.2. Interference Reconstruction And Cancellation Method
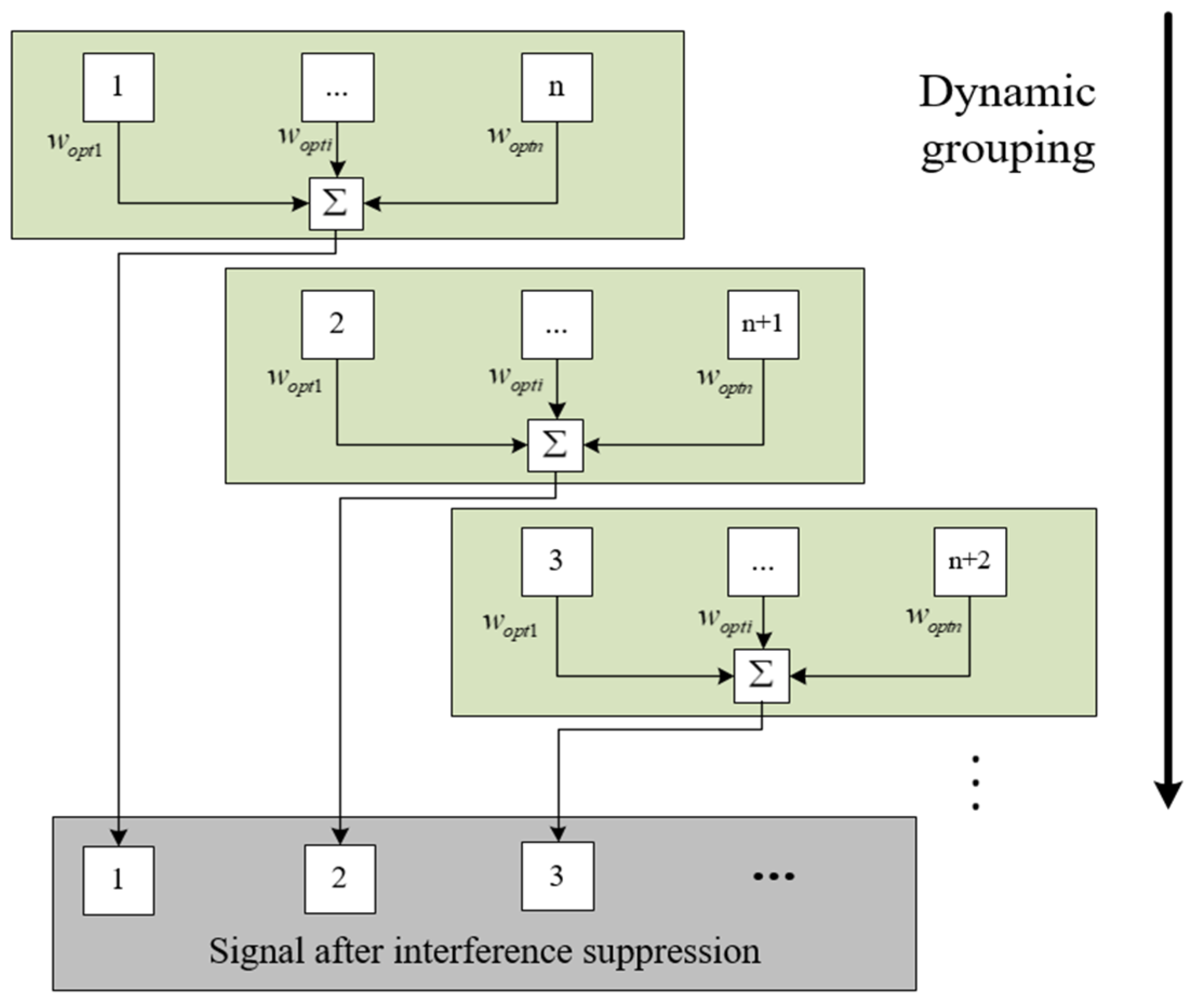
3.3. Channel Grouping Nulling Method
4. Simulation Verification and Analysis
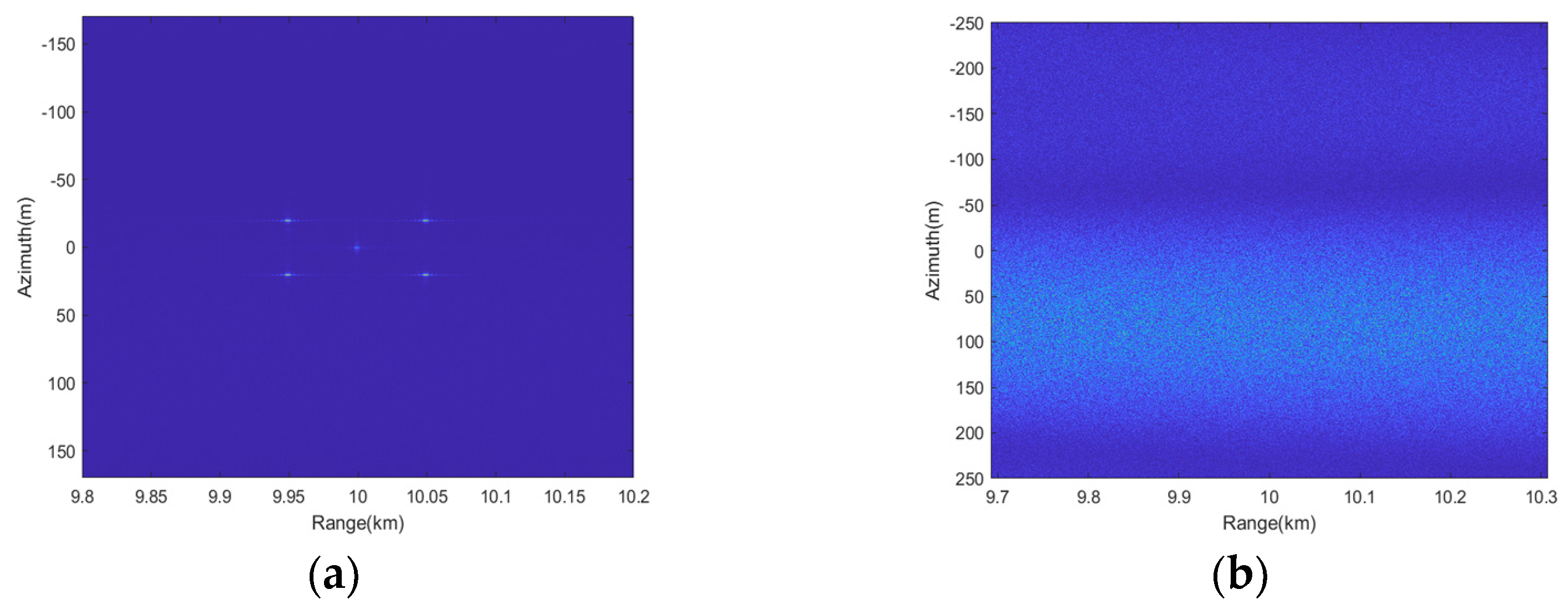
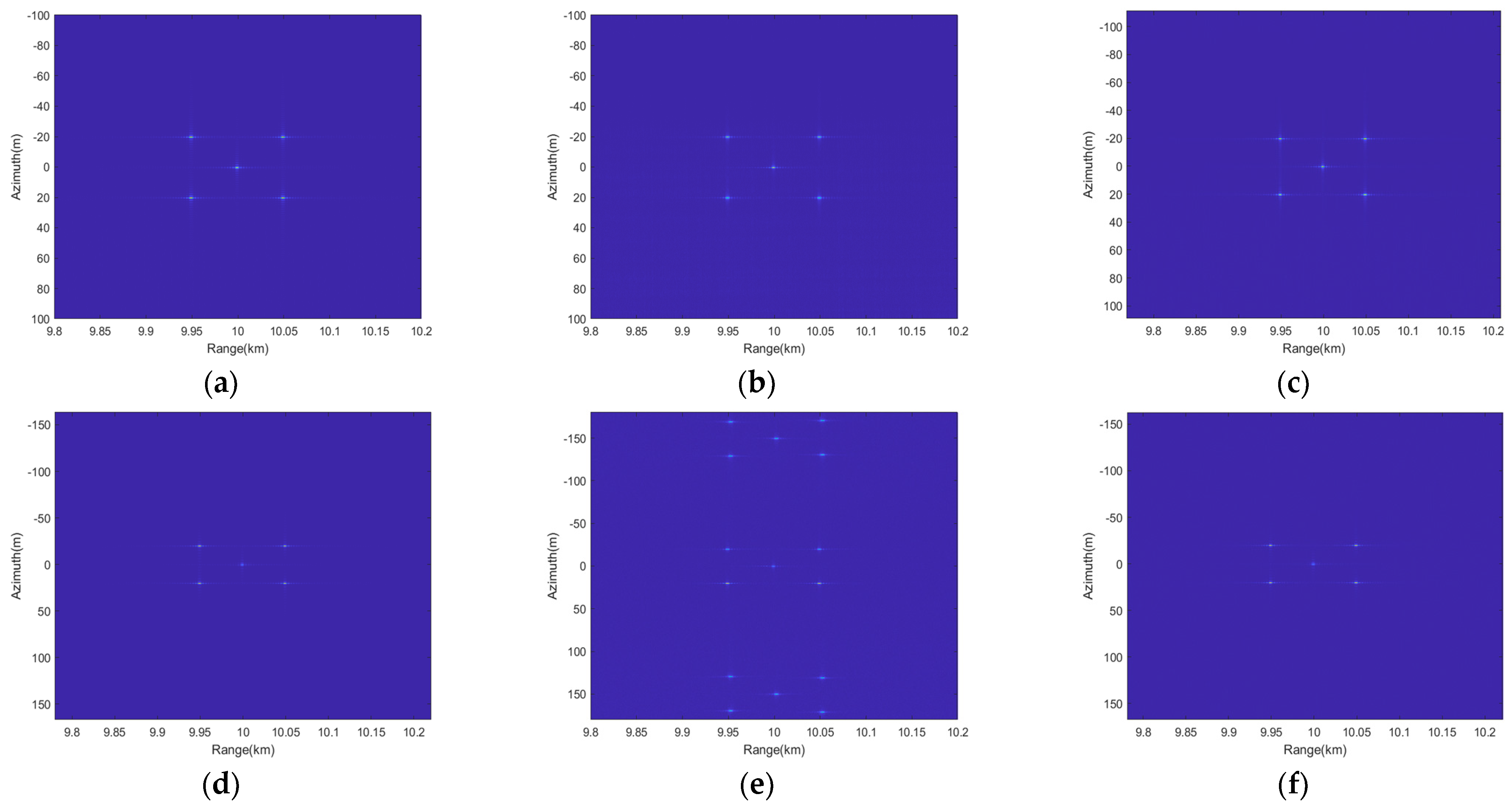
4.1. Point Targets Simulation
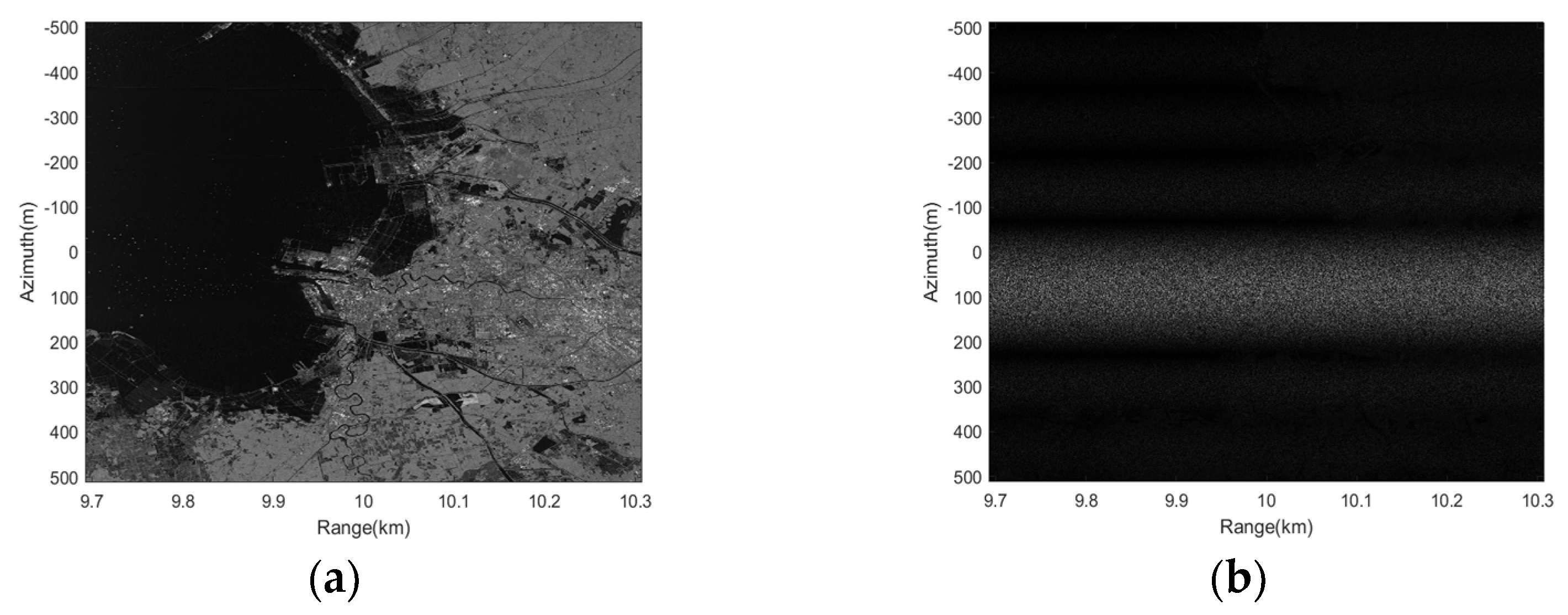
4.2. Distributed Targets Simulation
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Moreira, A.; Prats-Iraola, P.; Younis, M.; Krieger, G.; Hajnsek, I.; Papathanassiou, K.P. A tutorial on synthetic aperture radar. IEEE Geosci. Remote Sens. Mag. 2013, 1, 6–43. [Google Scholar] [CrossRef]
- Li, N.; Lv, Z.; Guo, Z. Pulse RFI Mitigation in Synthetic Aperture Radar Data via a Three-Step Approach: Location, Notch, and Recovery. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5225617. [Google Scholar] [CrossRef]
- Dong, Z.; He, F.; Jin, G.; Sun, Z.; Zhang, Y. Performance investigation on elevation cascaded digital beamforming for multidimensional waveform encoding SAR imaging. J. Radars 2020, 9, 828. [Google Scholar]
- Chen, J.; Xiong, R.; Yu, H.; Xu, G.; Xing, M. Nonparametric Full-Aperture Autofocus Imaging for Microwave Photonic SAR. IEEE Trans. Geosci. Remote Sens. 2024, 62, 5214815. [Google Scholar] [CrossRef]
- Krieger, G.; Gebert, N.; Moreira, A. Multidimensional waveform encoding: A new digital beamforming technique for synthetic aperture radar remote sensing (Article). IEEE Trans. Geosci. Remote Sens. 2008, 46, 31–46. [Google Scholar] [CrossRef]
- Bucciarelli, M.; Pastina, D.; Cristallini, D.; Sedehi, M.; Lombardo, P. Integration of Frequency Domain Wideband Antenna Nulling and Wavenumber Domain Image Formation for Multi-Channel SAR. Int. J. Antennas Propag. 2016, 2016, 2834904. [Google Scholar] [CrossRef]
- Sun, Z.; Leng, X.; Zhang, X.; Xiong, B.; Ji, K.; Kuang, G. Ship Recognition for Complex SAR Images via Dual-Branch Transformer Fusion Network. IEEE Geosci. Remote Sens. Lett. 2024, 21, 4009905. [Google Scholar] [CrossRef]
- Dong, J.; Zhang, Q.; Lu, W.; Cheng, W.; Liu, X. Hybrid Domain Efficient Modulation-Based Deceptive Jamming Algorithm for Nonlinear-Trajectory Synthetic Aperture Radar. Remote Sens. 2023, 15, 2446. [Google Scholar] [CrossRef]
- Tang, C.; Ding, J.; Qi, H.; Zhang, L. Smart forwarding deceptive jamming distribution optimal algorithm. IET Radar Sonar Navig. 2024, 18, 953–964. [Google Scholar] [CrossRef]
- Ling, Q.; Huang, P.; Wang, D.; Xu, H.; Wang, L.; Liu, X.; Liao, G.; Sun, Y. Range Deception Jamming Performance Evaluation for Moving Targets in a Ground-Based Radar Network. Electronics 2023, 12, 1614. [Google Scholar] [CrossRef]
- Liu, Y.-X.; Zhang, Q.; Xiong, S.-C.; Ni, J.-C.; Wang, D.; Wang, H.-B. An ISAR Shape Deception Jamming Method Based on Template Multiplication and Time Delay. Remote Sens. 2023, 15, 2762. [Google Scholar] [CrossRef]
- Zhao, B.; Zhou, F.; Bao, Z. Deception Jamming for Squint SAR Based on Multiple Receivers. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 3988–3998. [Google Scholar] [CrossRef]
- Huang, H.-X.; Zhou, Y.-Y.; Jing, W.; Huang, Z.-T. A frequency-based inter/intra partly coherent jamming style to SAR. In Proceedings of the 2010 2nd International Conference on Signal Processing Systems, Dalian, China, 5–7 July 2010. [Google Scholar]
- Tao, M.; Su, J.; Huang, Y.; Wang, L. Mitigation of radio frequency interference in synthetic aperture radar data: Current status and future trends. Remote Sens. 2019, 11, 2438. [Google Scholar] [CrossRef]
- Wang, W.; Wu, J.; Pei, J.; Sun, Z.; Yang, J.; Yi, Q. Antirange-Deception Jamming from Multijammer for Multistatic SAR. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5212512. [Google Scholar] [CrossRef]
- Tao, M.; Zhou, F.; Zhang, Z. Wideband Interference Mitigation in High-Resolution Airborne Synthetic Aperture Radar Data. IEEE Trans. Geosci. Remote Sens. 2016, 54, 74–87. [Google Scholar] [CrossRef]
- Queiroz de Almeida, F.; Younis, M.; Krieger, G.; Moreira, A. Multichannel Staggered SAR Azimuth Processing. IEEE Trans. Geosci. Remote Sens. 2018, 56, 2772–2788. [Google Scholar] [CrossRef]
- Sikaneta, I.; Gierull, C.H.; Cerutti-Maori, D. Optimum Signal Processing for Multichannel SAR: With Application to High-Resolution Wide-Swath Imaging. IEEE Trans. Geosci. Remote Sens. 2014, 52, 6095–6109. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, Y.; Li, Z.; Suo, Z.; Fang, C.; Chen, J. High-Resolution Wide-Swath Imaging of Spaceborne Multichannel Bistatic SAR with Inclined Geosynchronous Illuminator. IEEE Geosci. Remote Sens. Lett. 2017, 14, 2380–2384. [Google Scholar] [CrossRef]
- Currie, A.; Brown, M.A. Wide-swath SAR. Proc. Inst. Elect. Eng.-Radar Sonar Navigat. 1992, 139, 122–135. [Google Scholar] [CrossRef]
- Kim, J.-H.; Younis, M.; Gabele, M.; Prats, P.; Krieger, G. First Spaceborne Experiment of Digital Beam Forming with TerraSAR-X Dual Receive Antenna Mode. In Proceedings of the European Radar Conference, Chengdu, China, 24–27 October 2011. [Google Scholar]
- Kim, J.H.; Younis, M.; Prats-Iraola, P.; Gabele, M.; Krieger, G. First spaceborne demonstration of digital beamforming for azimuth ambiguity suppression. IEEE Trans. Geosci. Remote Sens. 2012, 51, 579–590. [Google Scholar] [CrossRef]
- Jing, W.; Xing, M.; Qiu, C.W.; Bao, Z.; Yeo, T.S. Unambiguous reconstruction and high-resolution imaging for multiple-channel SAR and airborne experiment results. IEEE Geosci. Remote Sens. Lett. 2009, 6, 102–106. [Google Scholar] [CrossRef]
- Chen, Z.; Zhang, Z.; Qiu, J.; Zhou, Y.; Wang, W.; Fan, H.; Wang, R. A Novel Motion Compensation Scheme for 2-D Multichannel SAR Systems with Quaternion Posture Calculation. IEEE Trans. Geosci. Remote Sens. 2021, 59, 9350–9360. [Google Scholar] [CrossRef]
- Chang, S.; Deng, Y.; Zhang, Y.; Zhao, Q.; Wang, R.; Zhang, K. An Advanced Scheme for Range Ambiguity Suppression of Spaceborne SAR Based on Blind Source Separation. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5230112. [Google Scholar] [CrossRef]
- Huang, Y.; Zhao, B.; Tao, M.; Chen, Z.; Hong, W. Review of synthetic aperture radar interference suppression. J. Radars 2020, 9, 86–106. [Google Scholar]
- Yu, J.; Li, J.; Sun, B.; Chen, J.; Li, C.; Li, W.; Xu, L. Single RFI Localization Based on Conjugate Cross-Correlation of Dual-Channel Sar Signals. In Proceedings of the IGARSS 2019–2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019. [Google Scholar]
- Lin, X.-H.; Xue, G.-Y.; Liu, P.-G. Novel data acquisition method for interference suppression in dual-channel SAR. Prog. Electromagn. Res. 2014, 144, 79–92. [Google Scholar] [CrossRef]
- Rosenberg, L.; Gray, D. Anti-jamming techniques for multichannel SAR imaging. Radar Sonar Navig. IEE Proc. 2006, 153, 234–242. [Google Scholar] [CrossRef]
- Yu, C.; Zhang, Y.; Yu, A.; Dong, Z.; Liang, D. Terrain scattered interference suppression for multichannel SAR. In Proceedings of the International Asia-pacific Conference on Synthetic Aperture Radar, Seoul, Reoublic of Korea, 26–30 September 2011; IEEE: Piscatvey, NJ, USA, 2011. [Google Scholar]
- Bollian, T.; Osmanoglu, B.; Rincon, R.; Lee, S.K.; Fatoyinbo, T. Adaptive Antenna Pattern Notching of Interference in Synthetic Aperture Radar Data Using Digital Beamforming. Remote Sens. 2019, 11, 1346. [Google Scholar] [CrossRef]
- Cerutti-Maori, D.; Sikaneta, I. A Generalization of DPCA Processing for Multichannel SAR/GMTI Radars. IEEE Trans. Geosci. Remote Sens. 2013, 51, 560–572. [Google Scholar] [CrossRef]
- Rongbing, G. Rebound Jamming Suppression by Two-Channel SAR. Signal Process. 2005, 21, 27–30. [Google Scholar]
- Cheng, S.; Sun, X.; Cai, Y.; Zheng, H.; Yu, W.; Zhang, Y.; Chang, S. A Joint Azimuth Multichannel Cancellation (JAMC) Anti-Barrage Jamming Scheme for Spaceborne SAR. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 9913–9926. [Google Scholar] [CrossRef]
- Huang, Y.; Wen, C.; Chen, Z.; Chen, J.; Liu, Y.; Li, J.; Hong, W. HRWS SAR Narrowband Interference Mitigation Using Low-Rank Recovery and Image-Domain Sparse Regularization. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5217914. [Google Scholar] [CrossRef]
- Gebert, N.; Krieger, G.; Moreira, A. Digital Beamforming on Receive: Techniques and Optimization Strategies for High-Resolution Wide-Swath SAR Imaging. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 564–592. [Google Scholar] [CrossRef]
- Bordoni, F.; Younis, M.; Krieger, G. Ambiguity Suppression by Azimuth Phase Coding in Multichannel SAR Systems. IEEE Trans. Geosci. Remote Sens. 2012, 50, 617–629. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbols | Value |
|---|---|---|
| Carrier frequency | 10 GHz | |
| Bandwidth | 50 MHz | |
| Equivalent baseline | 0.25 m | |
| Number of channels | 8 | |
| Nearest slant range | 10 km | |
| Platform velocity | ||
| Doppler bandwidth | 1600 Hz | |
| Platform height | 5 km |
| Target | Azimuth Direction | Range Direction | |||||
|---|---|---|---|---|---|---|---|
| PSLR (dB) | ISLR (dB) | Resolution (m) | PLSR (dB) | ISLR (dB) | Resolution (m) | ||
| Imaging result without interference | 1 | −13.097 | −9.742 | 0.125 | −13.193 | −9.476 | 2.967 |
| 2 | −13.157 | −9.734 | 0.125 | −13.184 | −9.464 | 2.952 | |
| 3 | −13.281 | −9.714 | 0.125 | −13.081 | −9.358 | 3.000 | |
| 4 | −13.175 | −9.741 | 0.125 | −13.218 | −9.509 | 3.000 | |
| 5 | −13.269 | −9.703 | 0.125 | −13.183 | −9.505 | 2.963 | |
| Processing result of IRC method | 1 | −13.481 | −9.701 | 0.125 | −13.242 | −9.043 | 3.000 |
| 2 | −13.548 | −9.658 | 0.125 | −13.149 | −9.132 | 2.980 | |
| 3 | −13.525 | −9.536 | 0.125 | −13.187 | −8.663 | 2.982 | |
| 4 | −13.264 | −9.525 | 0.125 | −13.199 | −9.134 | 2.980 | |
| 5 | −13.212 | −9.614 | 0.125 | −13.137 | −9.255 | 3.000 | |
| Processing result of CGN method | 1 | −13.011 | −9.354 | 0.163 | −13.338 | −9.574 | 2.991 |
| 2 | −13.153 | −9.881 | 0.163 | −13.048 | −9.576 | 3.000 | |
| 3 | −13.336 | −9.578 | 0.163 | −13.084 | −9.457 | 3.000 | |
| 4 | −13.402 | −9.501 | 0.163 | −13.437 | −9.591 | 2.928 | |
| 5 | −13.475 | −9.793 | 0.163 | −13.214 | −9.626 | 3.000 | |
| Method | Experimental Scenario Description | REME |
|---|---|---|
| Interference Reconstruction And Cancellation (IRC) Method | High JSR | 0.8077 |
| Low JSR | 0.6512 | |
| Channel Grouping Nulling (CGN) Method | High-order Doppler ambiguity | 0.7816 |
| Low-order Doppler ambiguity | 0.6051 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiao, Z.; He, F.; Sun, Z.; Zhang, Z. Mitigation of Suppressive Interference in AMPC SAR Based on Digital Beamforming. Remote Sens. 2024, 16, 2812. https://doi.org/10.3390/rs16152812
Xiao Z, He F, Sun Z, Zhang Z. Mitigation of Suppressive Interference in AMPC SAR Based on Digital Beamforming. Remote Sensing. 2024; 16(15):2812. https://doi.org/10.3390/rs16152812
Chicago/Turabian StyleXiao, Zhipeng, Feng He, Zaoyu Sun, and Zehua Zhang. 2024. "Mitigation of Suppressive Interference in AMPC SAR Based on Digital Beamforming" Remote Sensing 16, no. 15: 2812. https://doi.org/10.3390/rs16152812
APA StyleXiao, Z., He, F., Sun, Z., & Zhang, Z. (2024). Mitigation of Suppressive Interference in AMPC SAR Based on Digital Beamforming. Remote Sensing, 16(15), 2812. https://doi.org/10.3390/rs16152812