
Shoreliner: A Sub-Pixel Coastal Waterline Extraction Pipeline for Multi-Spectral Satellite Optical Imagery

 , , ,
, , ,
Abstract
1. Introduction
2. Methods
2.1. Water Indices: A Separation between Land and Sea
2.1.1. Radiometric Response in the Intertidal Zone and Optimisation
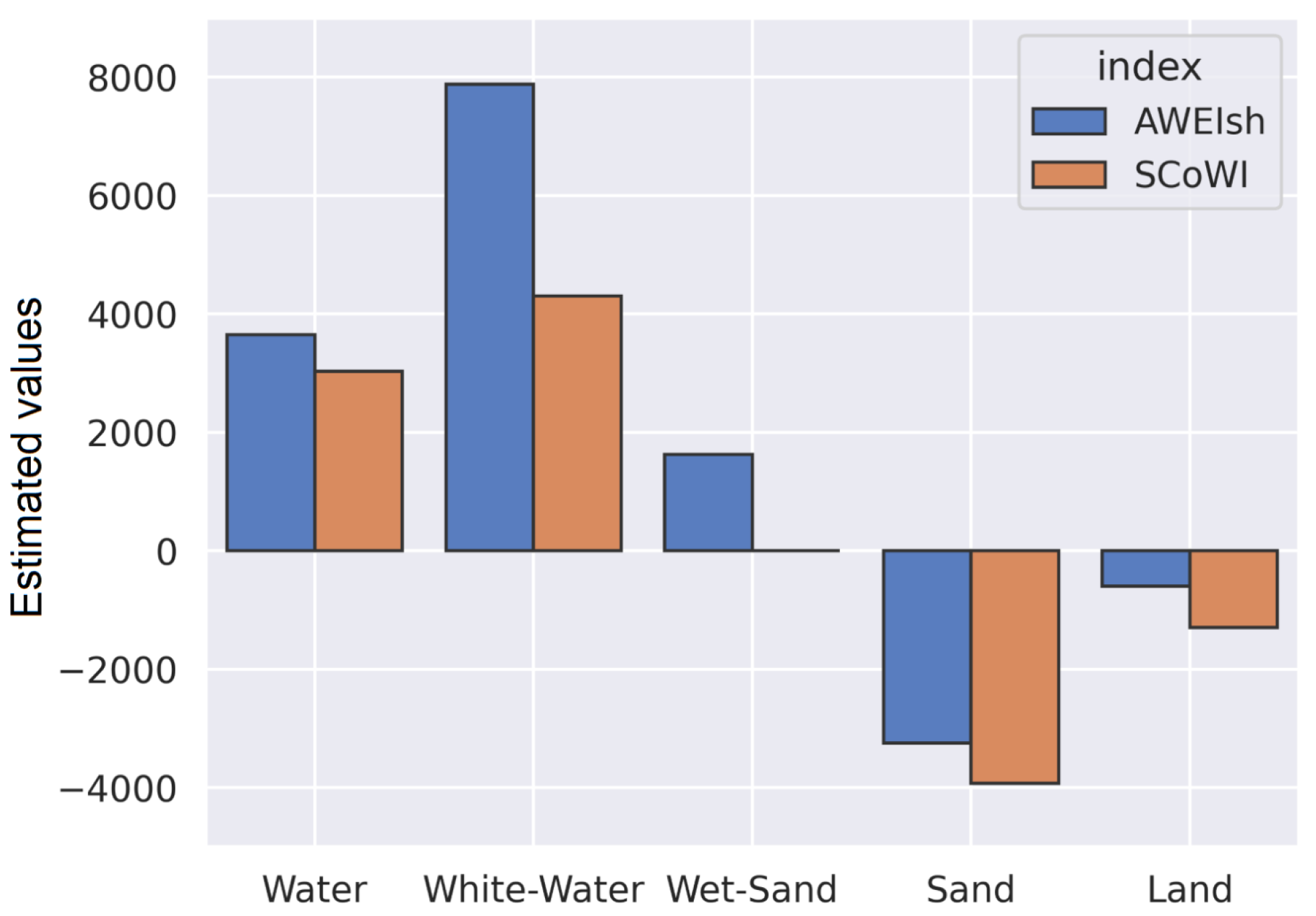
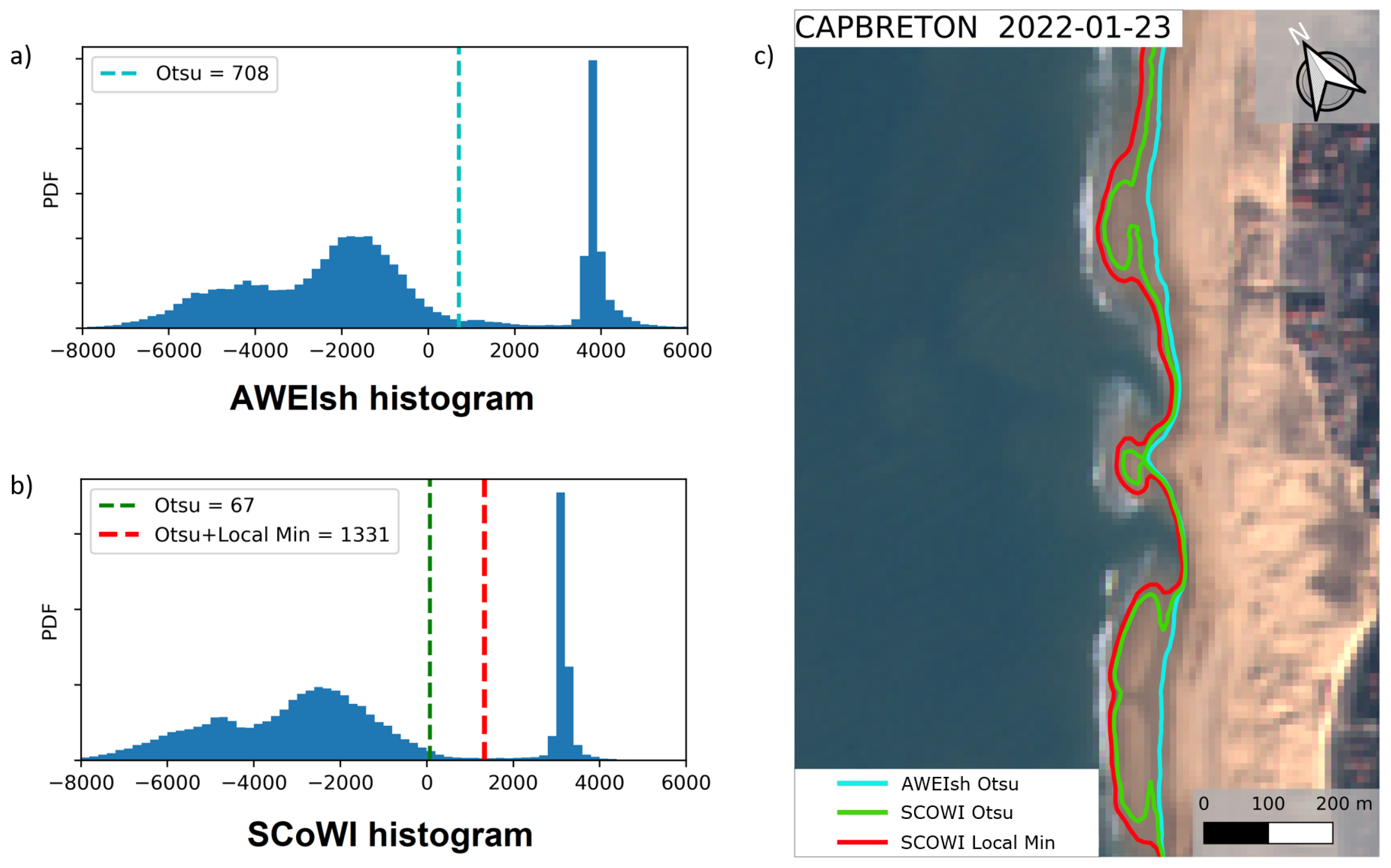
2.1.2. SCoWI: Optimised Water Index for Coastal Zones
2.2. Waterline Extraction Pipeline: Shoreliner
2.2.1. Sentinel-2 Imagery and Pre-Processing
2.2.2. Waterline Detection and Extraction
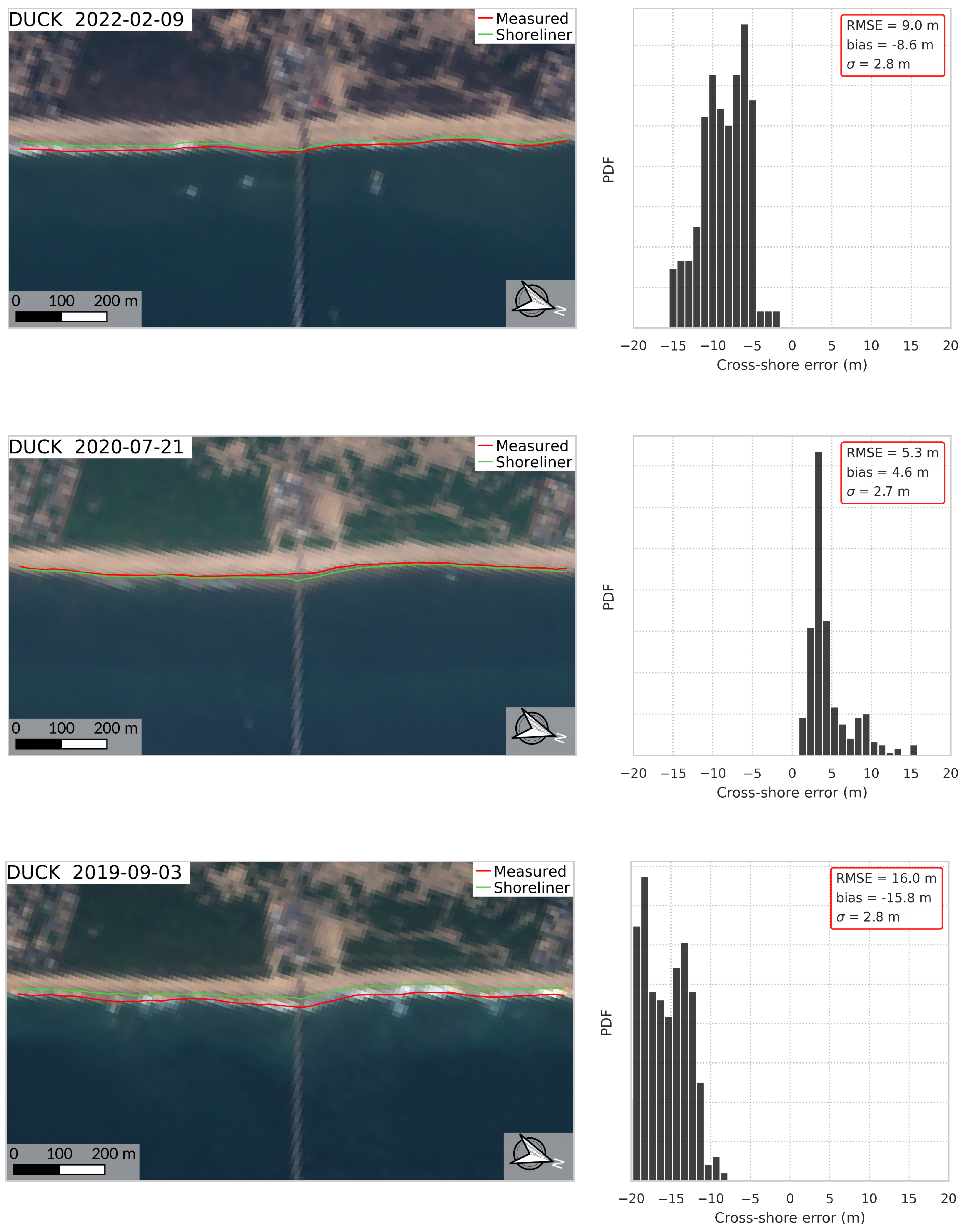
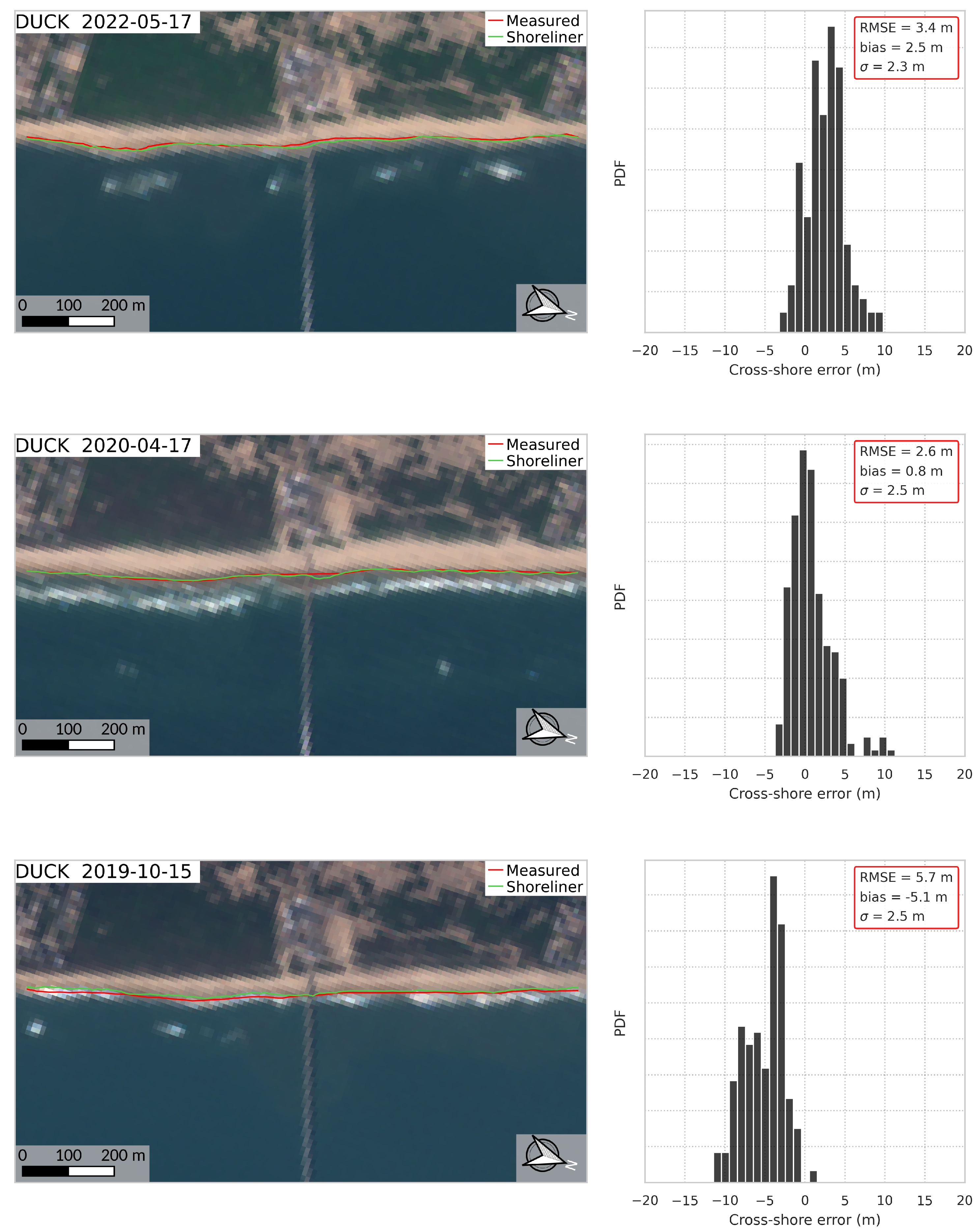
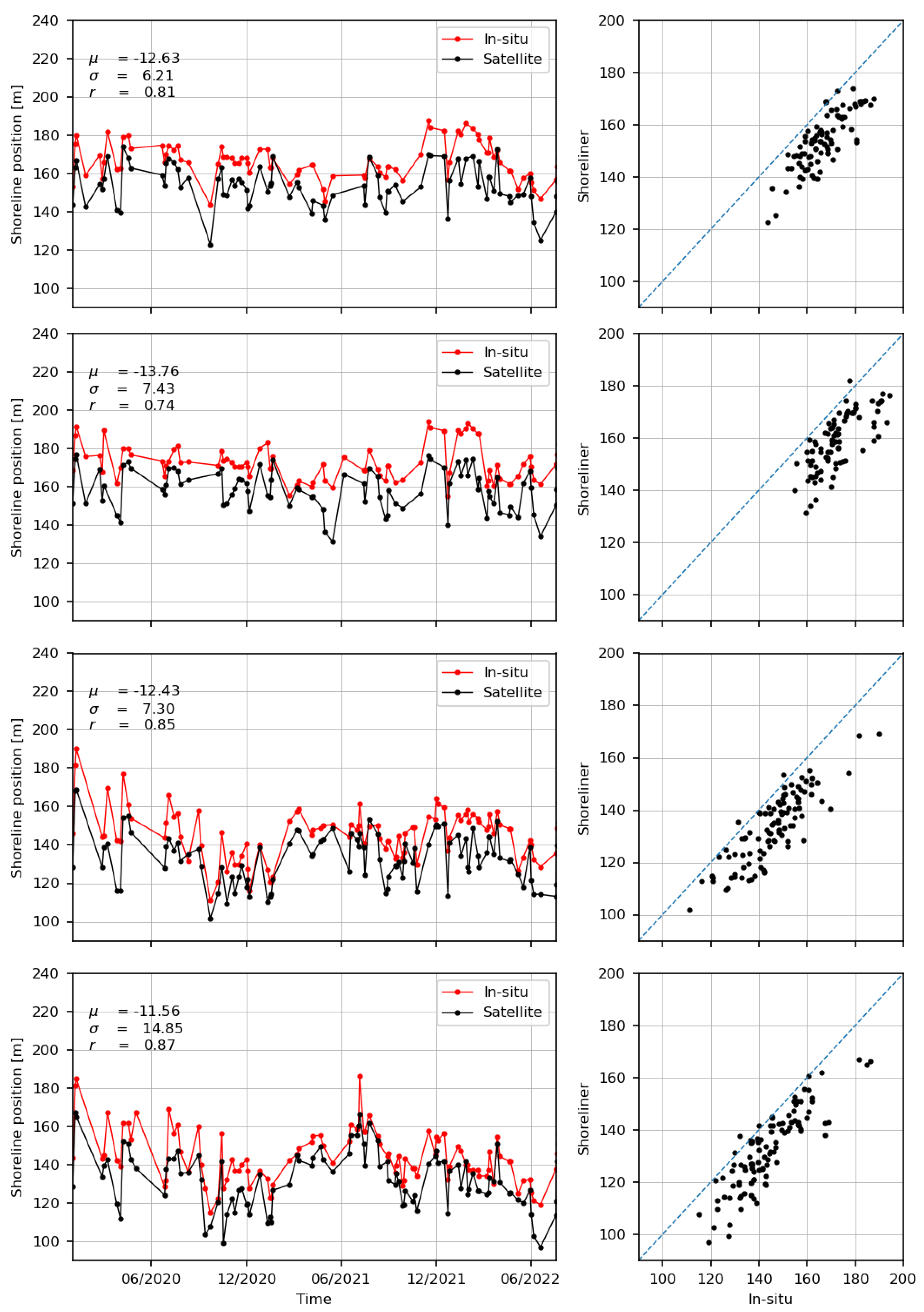
3. Validation
4. Results and Discussion
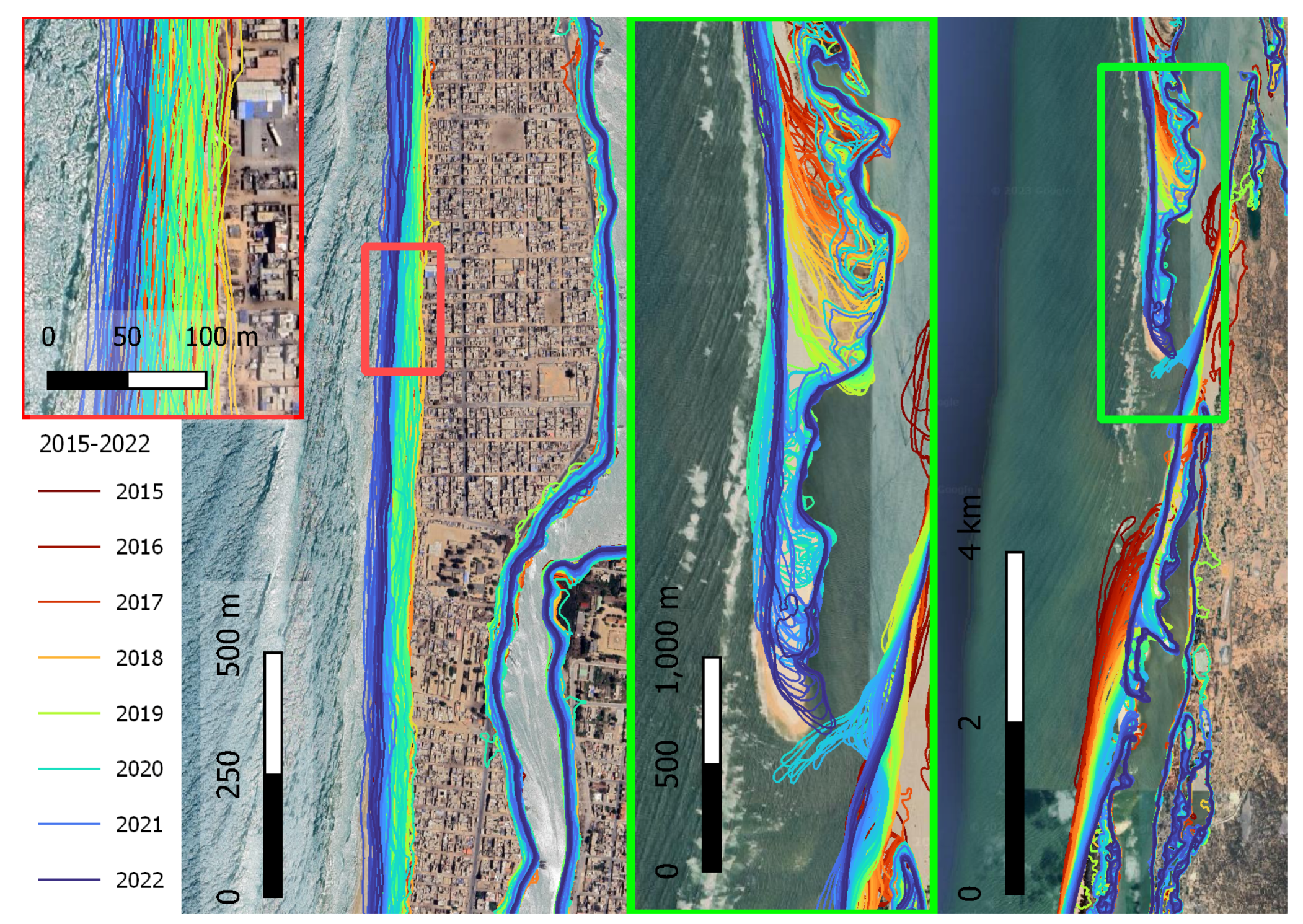
4.1. Large-Scale Applications
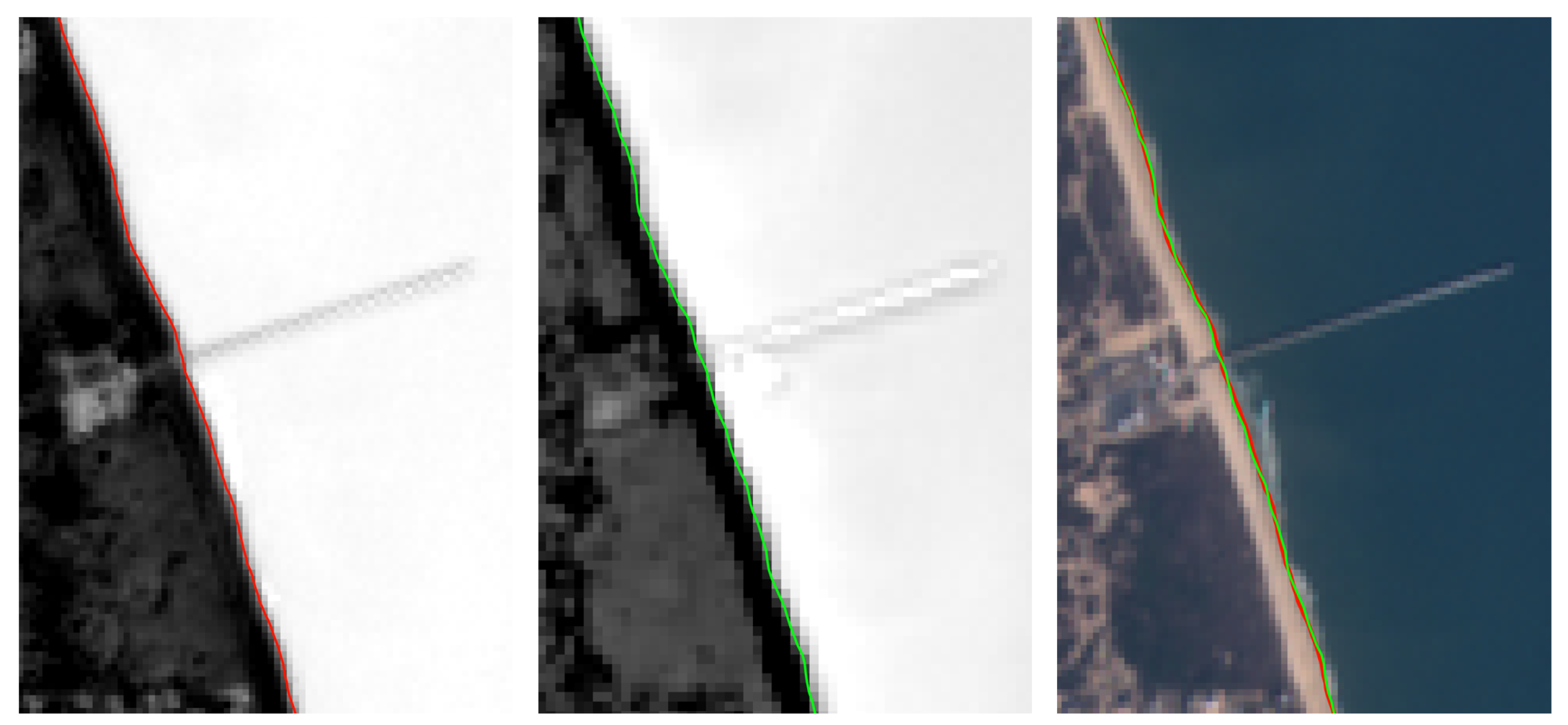
4.2. Transferability to Other Satellite Sensors
4.3. Limitations
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| API | Application Programming Interface |
| AVISO | Archiving, Validation and Interpretation of Satellite Oceanographic Data |
| AWEI | Automated Water Extraction Index |
| CASSIE | Coastal Analyst System from Space Imagery Engine |
| CNES | Centre National d’Etudes Spatiales |
| ECFAS | European Coastal Flood Awareness System |
| ERDC | Engineer Research and Development Center |
| FES | Finite Element Solution |
| FRF | Field Research Facility |
| GPS | Global Positioning System |
| HPC | High Performance Cluster |
| IRD | Institut de Recherche pour le developpement |
| LEGOS | Laboratoire d’Etudes en Geophysique et Oceanographie Spatiales |
| NDWI | Normalised Difference Water Index |
| MNDWI | Mean Normalised Difference Water Index |
| MDPI | Multidisciplinary Digital Publishing Institute |
| NIR | Near Infrared |
| NOAA | National Oceanic and Atmospheric Administration |
| PEPS | Plateforme d’Exploitation des Produits Sentinel |
| RGB | Red–Green–Blue |
| RMS | Root Mean Square |
| SCoWI | Subtractive Coastal Water Index |
| SDS | Satellite-Derived Shoreline |
| SWIR | Short Wave InfraRed |
Appendix A
References
- Mohamed Rashidi, A.H.; Jamal, M.H.; Hassan, M.Z.; Mohd Sendek, S.S.; Mohd Sopie, S.L.; Abd Hamid, M.R. Coastal Structures as Beach Erosion Control and Sea Level Rise Adaptation in Malaysia: A Review. Water 2021, 13, 1741. [Google Scholar] [CrossRef]
- Vitousek, S.; Barnard, P.L.; Limber, P. Can beaches survive climate change? J. Geophys. Res. Earth Surf. 2017, 122, 1060–1067. [Google Scholar] [CrossRef]
- Vitousek, S.; Vos, K.; Splinter, K.D.; Erikson, L.; Barnard, P.L. A Model Integrating Satellite-Derived Shoreline Observations for Predicting Fine-Scale Shoreline Response to Waves and Sea-Level Rise Across Large Coastal Regions. J. Geophys. Res. Earth Surf. 2023, 128, e2022JF006936. [Google Scholar] [CrossRef]
- Bergsma, E.W.J.; Almar, R.; Anthony, E.J.; Garlan, T.; Kestenare, E. Wave variability along the world’s continental shelves and coasts: Monitoring opportunities from satellite Earth observation. Adv. Space Res. 2022, 69, 3236–3244. [Google Scholar] [CrossRef]
- Apostolopoulos, D.; Nikolakopoulos, K. A review and meta-analysis of remote sensing data, GIS methods, materials and indices used for monitoring the coastline evolution over the last twenty years. Eur. J. Remote Sens. 2021, 54, 240–265. [Google Scholar] [CrossRef]
- Bishop-Taylor, R.; Nanson, R.; Sagar, S.; Lymburner, L. Mapping Australia’s dynamic coastline at mean sea level using three decades of Landsat imagery. Remote Sens. Environ. 2021, 267, 112734. [Google Scholar] [CrossRef]
- Wu, L.; Tajima, Y.; Yamanaka, Y.; Shimozono, T.; Sato, S. Study on characteristics of SAR imagery around the coast for shoreline detection. Coast. Eng. J. 2019, 61, 152–170. [Google Scholar] [CrossRef]
- Tajima, Y.; Wu, L.; Fuse, T.; Shimozono, T.; Sato, S. Study on shoreline monitoring system based on satellite SAR imagery. Coast. Eng. J. 2019, 61, 401–421. [Google Scholar] [CrossRef]
- Yoshimitsu, T.; Lianhui, W.; Kunihiro, W. Development of a Shoreline Detection Method Using an Artificial Neural Network Based on Satellite SAR Imagery. Remote Sens. 2021, 13, 2254. [Google Scholar] [CrossRef]
- Binet, R.; Bergsma, E.W.J.; Poulain, V. ACCURATE SENTINEL-2 INTER-BAND TIME DELAYS. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2022, V-1-2022, 57–66. [Google Scholar] [CrossRef]
- McAllister, E.; Payo, A.; Novellino, A.; Dolphin, T.; Medina-Lopez, E. Multispectral satellite imagery and machine learning for the extraction of shoreline indicators. Coast. Eng. 2022, 174, 104102. [Google Scholar] [CrossRef]
- Vos, K.; Splinter, K.D.; Harley, M.D.; Simmons, J.A.; Turner, I.L. CoastSat: A Google Earth Engine-enabled Python toolkit to extract shorelines from publicly available satellite imagery. Environ. Model. Softw. 2019, 122, 104528. [Google Scholar] [CrossRef]
- Almeida, L.P.; Efraim de Oliveira, I.; Lyra, R.; Scaranto Dazzi, R.L.; Martins, V.G.; Henrique da Fontoura Klein, A. Coastal Analyst System from Space Imagery Engine (CASSIE): Shoreline management module. Environ. Model. Softw. 2021, 140, 105033. [Google Scholar] [CrossRef]
- Khan, M.J.U.; Ansary, M.N.; Durand, F.; Testut, L.; Ishaque, M.; Calmant, S.; Krien, Y.; Islam, A.S.; Papa, F. High-Resolution Intertidal Topography from Sentinel-2 Multi-Spectral Imagery: Synergy between Remote Sensing and Numerical Modeling. Remote Sens. 2019, 11, 2888. [Google Scholar] [CrossRef]
- Irazoqui Apecechea, M.; Melet, A.; Armaroli, C. Towards a pan-European coastal flood awareness system: Skill of extreme sea-level forecasts from the Copernicus Marine Service. Front. Mar. Sci. 2023, 9, 1091844. [Google Scholar] [CrossRef]
- Pucino, N.; Kennedy, D.M.; Young, M.; Ierodiaconou, D. Assessing the accuracy of Sentinel-2 instantaneous subpixel shorelines using synchronous UAV ground truth surveys. Remote Sens. Environ. 2022, 282, 113293. [Google Scholar] [CrossRef]
- Gao, B. NDWI—A normalized difference water index for remote sensing of vegetation liquid water from space. Remote Sens. Environ. 1996, 58, 257–266. [Google Scholar] [CrossRef]
- McFEETERS, S.K. The use of the Normalized Difference Water Index (NDWI) in the delineation of open water features. Int. J. Remote Sens. 1996, 17, 1425–1432. [Google Scholar] [CrossRef]
- Xu, H. Modification of normalised difference water index (NDWI) to enhance open water features in remotely sensed imagery. Int. J. Remote Sens. 2006, 27, 3025–3033. [Google Scholar] [CrossRef]
- Pekel, J.F.; Vancutsem, C.; Bastin, L.; Clerici, M.; Vanbogaert, E.; Bartholomé, E.; Defourny, P. A near real-time water surface detection method based on HSV transformation of MODIS multi-spectral time series data. Remote Sens. Environ. 2014, 140, 704–716. [Google Scholar] [CrossRef]
- Feyisa, G.L.; Meilby, H.; Fensholt, R.; Proud, S.R. Automated Water Extraction Index: A new technique for surface water mapping using Landsat imagery. Remote Sens. Environ. 2014, 140, 23–35. [Google Scholar] [CrossRef]
- Fisher, A.; Flood, N.; Danaher, T. Comparing Landsat water index methods for automated water classification in eastern Australia. Remote Sens. Environ. 2016, 175, 167–182. [Google Scholar] [CrossRef]
- Bishop-Taylor, R.; Sagar, S.; Lymburner, L.; Alam, I.; Sixsmith, J. Sub-Pixel Waterline Extraction: Characterising Accuracy and Sensitivity to Indices and Spectra. Remote Sens. 2019, 11, 2984. [Google Scholar] [CrossRef]
- Sentinel 2 Mission Requirements Document; European Space Agency: Paris, France, 2010.
- Bergsma, E.W.J.; Almar, R. Coastal coverage of ESA’ Sentinel 2 mission. Adv. Space Res. 2020, 65, 2636–2644. [Google Scholar] [CrossRef]
- Vos, K.; Harley, M.D.; Splinter, K.D.; Simmons, J.A.; Turner, I.L. Sub-annual to multi-decadal shoreline variability from publicly available satellite imagery. Coast. Eng. 2019, 150, 160–174. [Google Scholar] [CrossRef]
- Otsu, N. A Threshold Selection Method from Gray-Level Histograms. IEEE Trans. Syst. Man Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef]
- Castelle, B.; Masselink, G.; Scott, T.; Stokes, C.; Konstantinou, A.; Marieu, V.; Bujan, S. Satellite-derived shoreline detection at a high-energy meso-macrotidal beach. Geomorphology 2021, 383, 107707. [Google Scholar] [CrossRef]
- Cipolletti, M.P.; Delrieux, C.A.; Perillo, G.M.; Cintia Piccolo, M. Superresolution border segmentation and measurement in remote sensing images. Comput. Geosci. 2012, 40, 87–96. [Google Scholar] [CrossRef]
- Forte, M.F.; Birkemeier, W.A.; Mitchell, J.R. Nearshore Survey System Evaluation; Technical Report; U.S. Army Engineer Research and Development Center ERDC-CHL Vicksburg United States: Vicksburg, MI, USA, 2017. [Google Scholar]
- Park, J.; Heitsenrether, R.; Sweet, W. Water level and wave height estimates at NOAA tide stations from acoustic and microwave sensors. J. Atmos. Ocean. Technol. 2014, 31, 2294–2308. [Google Scholar] [CrossRef]
- Konstantinou, A.; Scott, T.; Masselink, G.; Stokes, K.; Conley, D.; Castelle, B. Satellite-based shoreline detection along high-energy macrotidal coasts and influence of beach state. Mar. Geol. 2023, 462, 107082. [Google Scholar] [CrossRef]
- Vos, K.; Splinter, K.D.; Palomar-Vázquez, J.; Pardo-Pascual, J.E.; Almonacid-Caballer, J.; Cabezas-Rabadán, C.; Kras, E.C.; Luijendijk, A.P.; Calkoen, F.; Almeida, L.P.; et al. Benchmarking satellite-derived shoreline mapping algorithms. Commun. Earth Environ. 2023, 4, 345. [Google Scholar] [CrossRef]
- Graffin, M.; Taherkhani, M.; Leung, M.; Vitousek, S.; Kaminsky, G.; Ruggiero, P. Monitoring interdecadal coastal change along dissipative beaches via satellite imagery at regional scale. Camb. Prisms Coast. Futur. 2023, 1, e42. [Google Scholar] [CrossRef]
- Vos, K.; Harley, M.D.; Turner, I.L.; Splinter, K.D. Pacific shoreline erosion and accretion patterns controlled by El Niño/Southern Oscillation. Nat. Geosci. 2023, 16, 140–146. [Google Scholar] [CrossRef]
- Almar, R.; Stieglitz, T.; Addo, K.A.; Ba, K.; Ondoa, G.A.; Bergsma, E.W.J.; Bonou, F.; Dada, O.; Angnuureng, D.; Arino, O. Coastal Zone Changes in West Africa: Challenges and Opportunities for Satellite Earth Observations. Surv. Geophys. 2022, 44, 249–275. [Google Scholar] [CrossRef]
- Bergsma, E.W.J.; Sadio, M.; Sakho, I.; Almar, R.; Garlan, T.; Gosselin, M.; Gauduin, H. Sand-spit Evolution and Inlet Dynamics derived from Space-borne Optical Imagery: Is the Senegal-river Inlet Closing? J. Coast. Res. 2020, 95, 372–376. [Google Scholar] [CrossRef]
- Taveneau, A.; Almar, R.; Bergsma, E.W.J.; Sy, B.A.; Ndour, A.; Sadio, M.; Garlan, T. bserving and Predicting Coastal Erosion at the Langue de Barbarie Sand Spit around Saint Louis (Senegal, West Africa) through Satellite-Derived Digital Elevation Model and Shoreline. Remote Sens. 2021, 13, 2454. [Google Scholar] [CrossRef]
- Daly, C.; Baba, W.; Bergsma, E.W.J.; Thoumyre, G.; Almar, R.; Garlan, T. The new era of regional coastal bathymetry from space: A showcase for West Africa using optical Sentinel-2 imagery. Remote Sens. Environ. 2022, 278, 113084. [Google Scholar] [CrossRef]
- Lyard, F.H.; Allain, D.J.; Cancet, M.; Carrère, L.; Picot, N. FES2014 global ocean tide atlas: Design and performance. Ocean Sci. 2021, 17, 615–649. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Case | Date | Comp. Time (s) | RMSD [m] | Bias [m] | Std [m] | Max [m] |
|---|---|---|---|---|---|---|---|
| CoastSat | best | 9 February 2022 | 27.873 | 9.8 | 4.1 | 8.9 | 16.7 |
| Shoreliner | best | 17 April 2020 | 2.237 | 2.6 | 0.8 | 2.5 | 10.3 |
| CoastSat | all-data | - | - | 19.1 | 15.1 | 11.8 | 50.6 |
| Shoreliner | all-data | - | - | 8.3 | −3.6 | 7.5 | 20.8 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bergsma, E.W.J.; Klotz, A.N.; Artigues, S.; Graffin, M.; Prenowitz, A.; Delvit, J.-M.; Almar, R. Shoreliner: A Sub-Pixel Coastal Waterline Extraction Pipeline for Multi-Spectral Satellite Optical Imagery. Remote Sens. 2024, 16, 2795. https://doi.org/10.3390/rs16152795
Bergsma EWJ, Klotz AN, Artigues S, Graffin M, Prenowitz A, Delvit J-M, Almar R. Shoreliner: A Sub-Pixel Coastal Waterline Extraction Pipeline for Multi-Spectral Satellite Optical Imagery. Remote Sensing. 2024; 16(15):2795. https://doi.org/10.3390/rs16152795
Chicago/Turabian StyleBergsma, Erwin W. J., Adrien N. Klotz, Stéphanie Artigues, Marcan Graffin, Anna Prenowitz, Jean-Marc Delvit, and Rafael Almar. 2024. "Shoreliner: A Sub-Pixel Coastal Waterline Extraction Pipeline for Multi-Spectral Satellite Optical Imagery" Remote Sensing 16, no. 15: 2795. https://doi.org/10.3390/rs16152795
APA StyleBergsma, E. W. J., Klotz, A. N., Artigues, S., Graffin, M., Prenowitz, A., Delvit, J.-M., & Almar, R. (2024). Shoreliner: A Sub-Pixel Coastal Waterline Extraction Pipeline for Multi-Spectral Satellite Optical Imagery. Remote Sensing, 16(15), 2795. https://doi.org/10.3390/rs16152795