

Harmonized Landsat and Sentinel-2 Data with Google Earth Engine



Abstract
1. Introduction
2. Materials and Methods
2.1. Harmonizing Sentinel-2, Landsat-7, and Landsat-8 Imagery
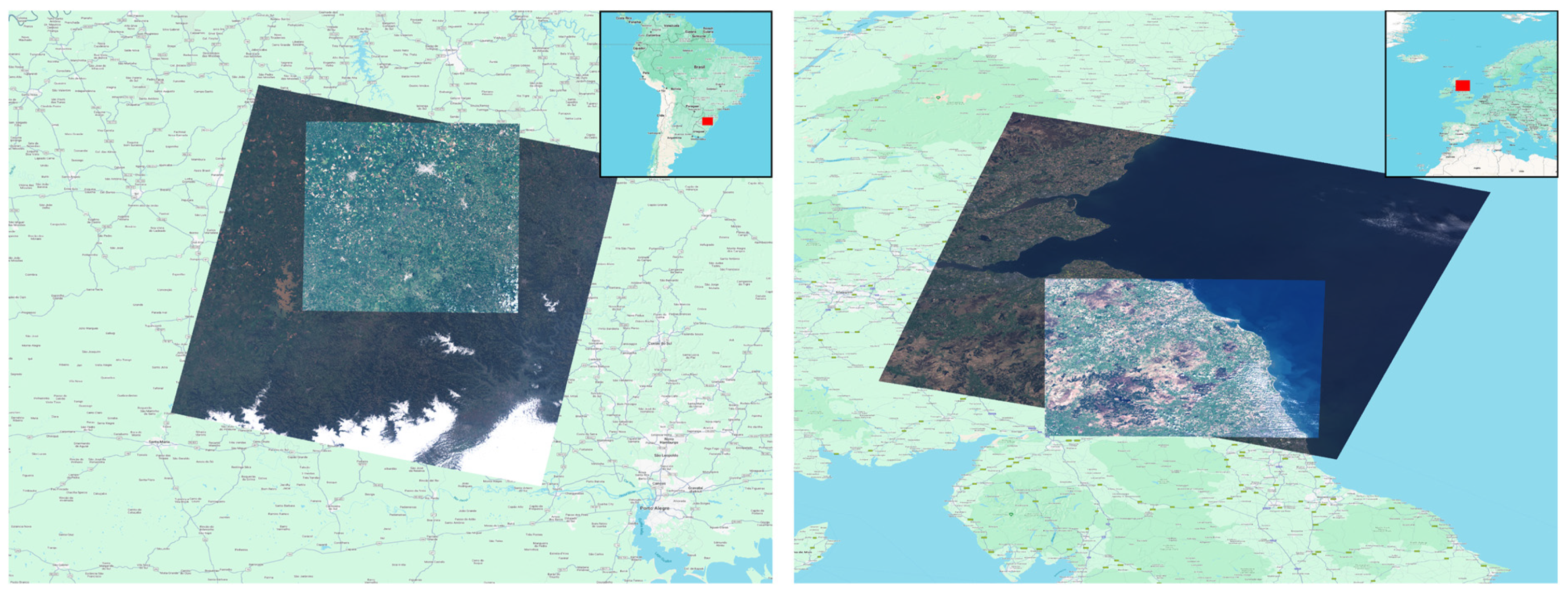
2.1.1. Workflow Overview and Test Site
- L7-30: ETM+ harmonized surface reflectance resampled to 30 m into the Sentinel-2 tiling system, and adjusted to Sentinel-2 spectral bands.
- L8-30: OLI harmonized surface reflectance resampled to 30 m into the Sentinel-2 tiling system, and adjusted to Sentinel-2 spectral bands.
- S2-30: MSI harmonized surface reflectance resampled to 30 m into the Sentinel-2 tiling system.
- Gridded to a common pixel resolution, map projection, and spatial extent.
- Atmospherically corrected to surface reflectance using a common radiative transfer algorithm.
- Normalized to a common nadir view geometry via bidirectional reflectance distribution function (BRDF) estimation.
- Adjusted to represent the response from common spectral bandpasses.
2.1.2. Satellite Data
- L7: “USGS Landsat 7 Collection 2 Tier 1 TOA Reflectance”.
- L8: “USGS Landsat 8 Collection 2 Tier 1 TOA Reflectance”.
- S2: “Harmonized Sentinel-2 MSI: MultiSpectral Instrument, Level-1C”.
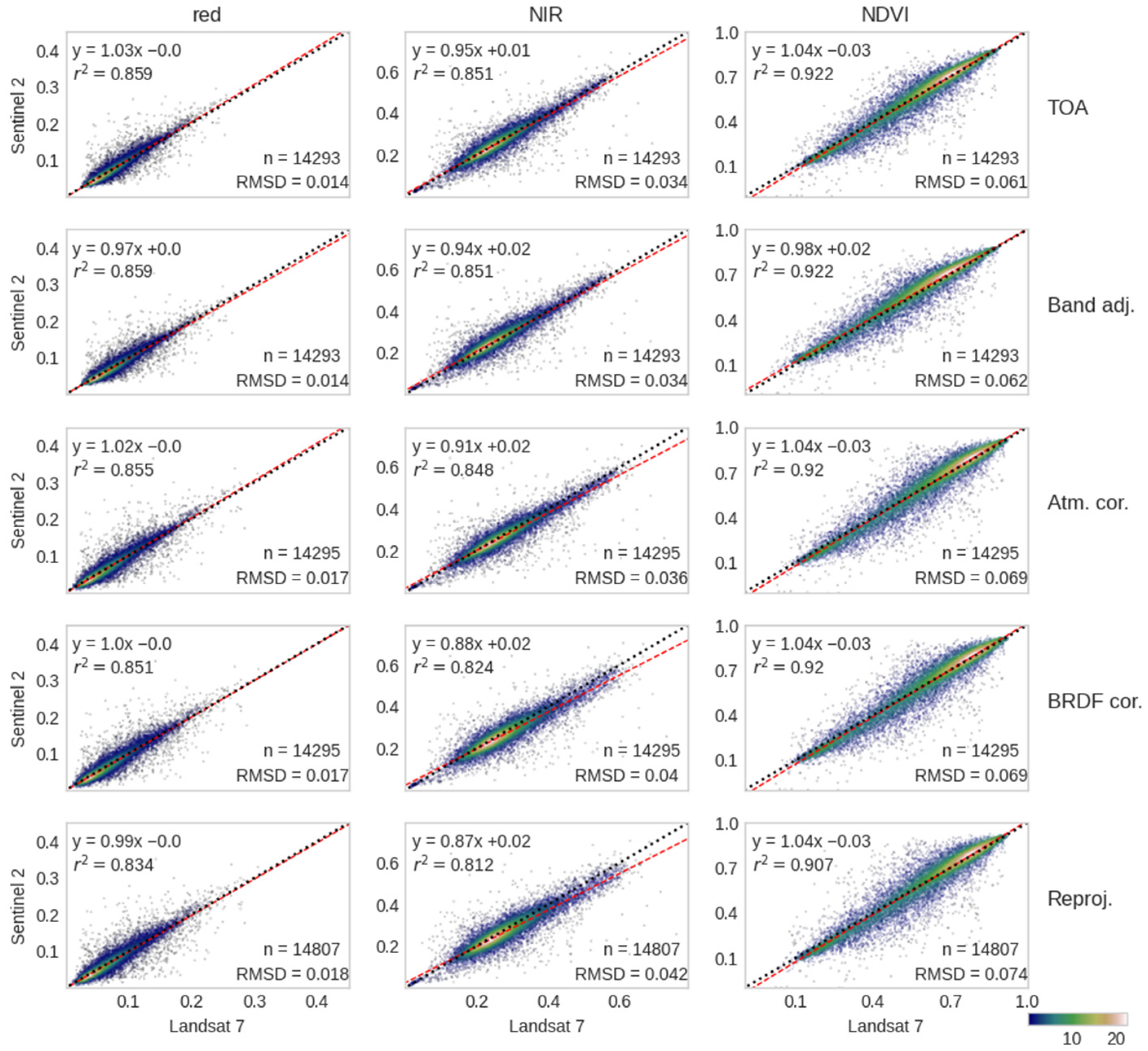
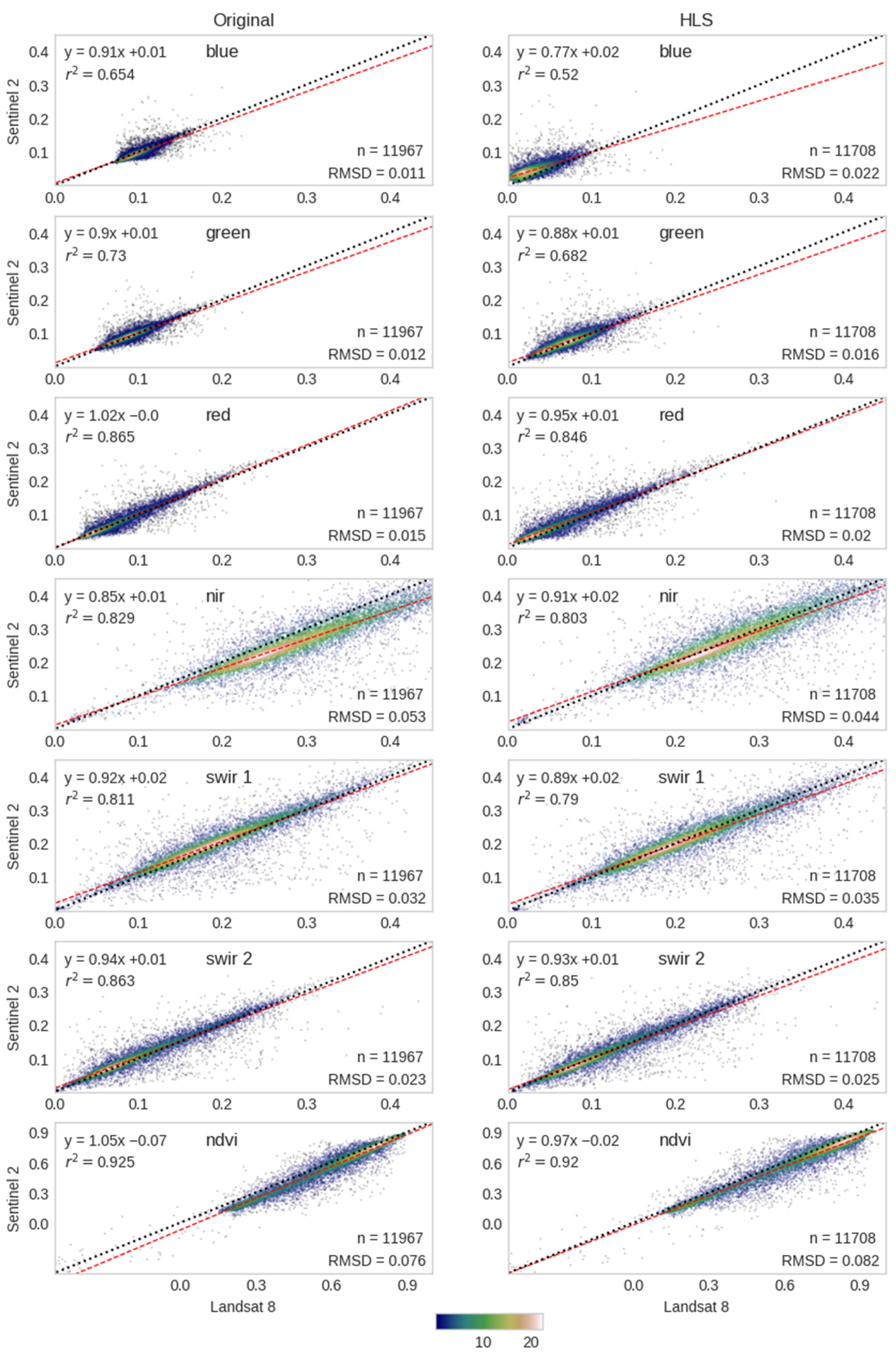
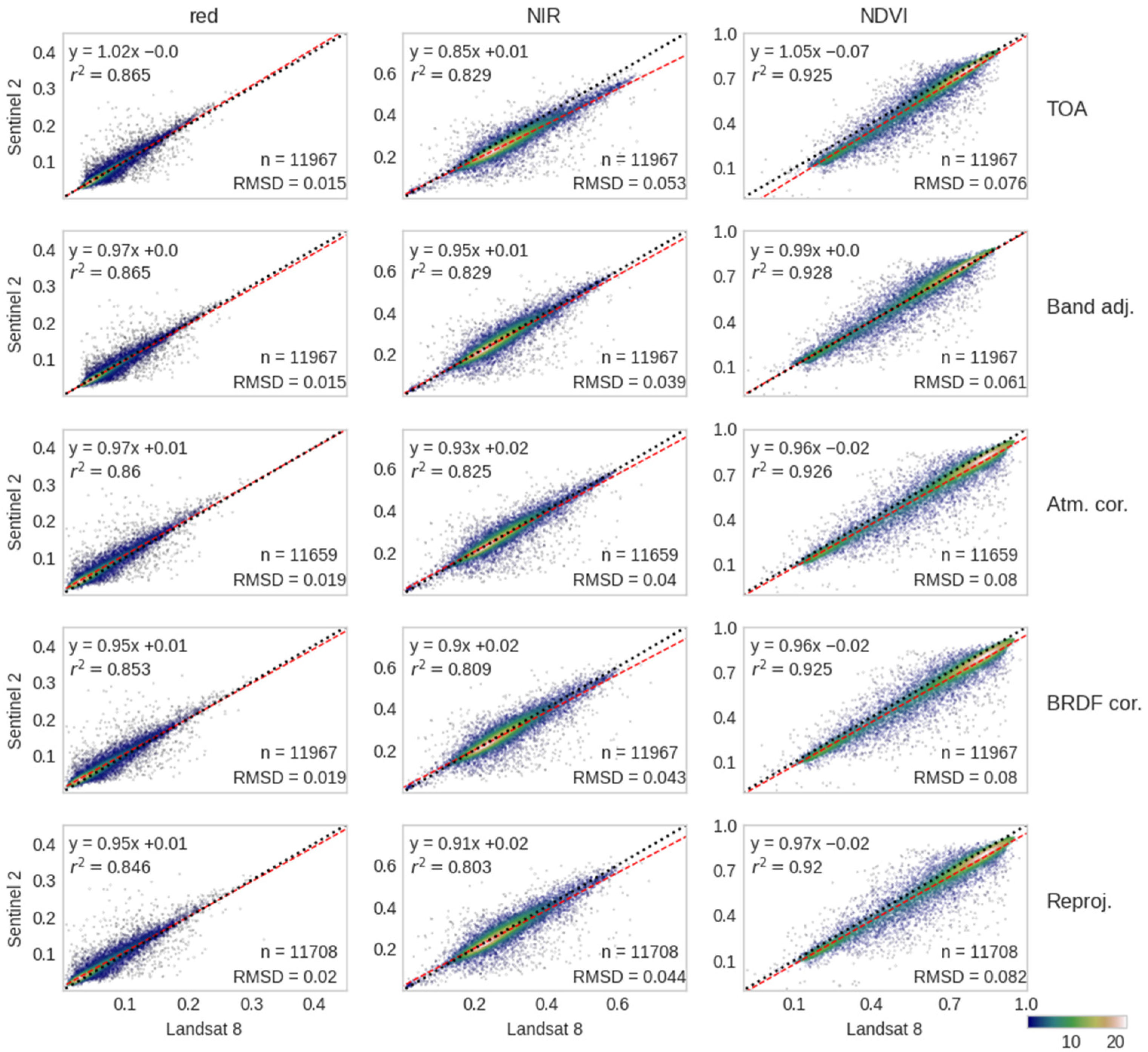
2.1.3. Inter-Sensor Band Adjustment
2.1.4. Atmospheric Correction
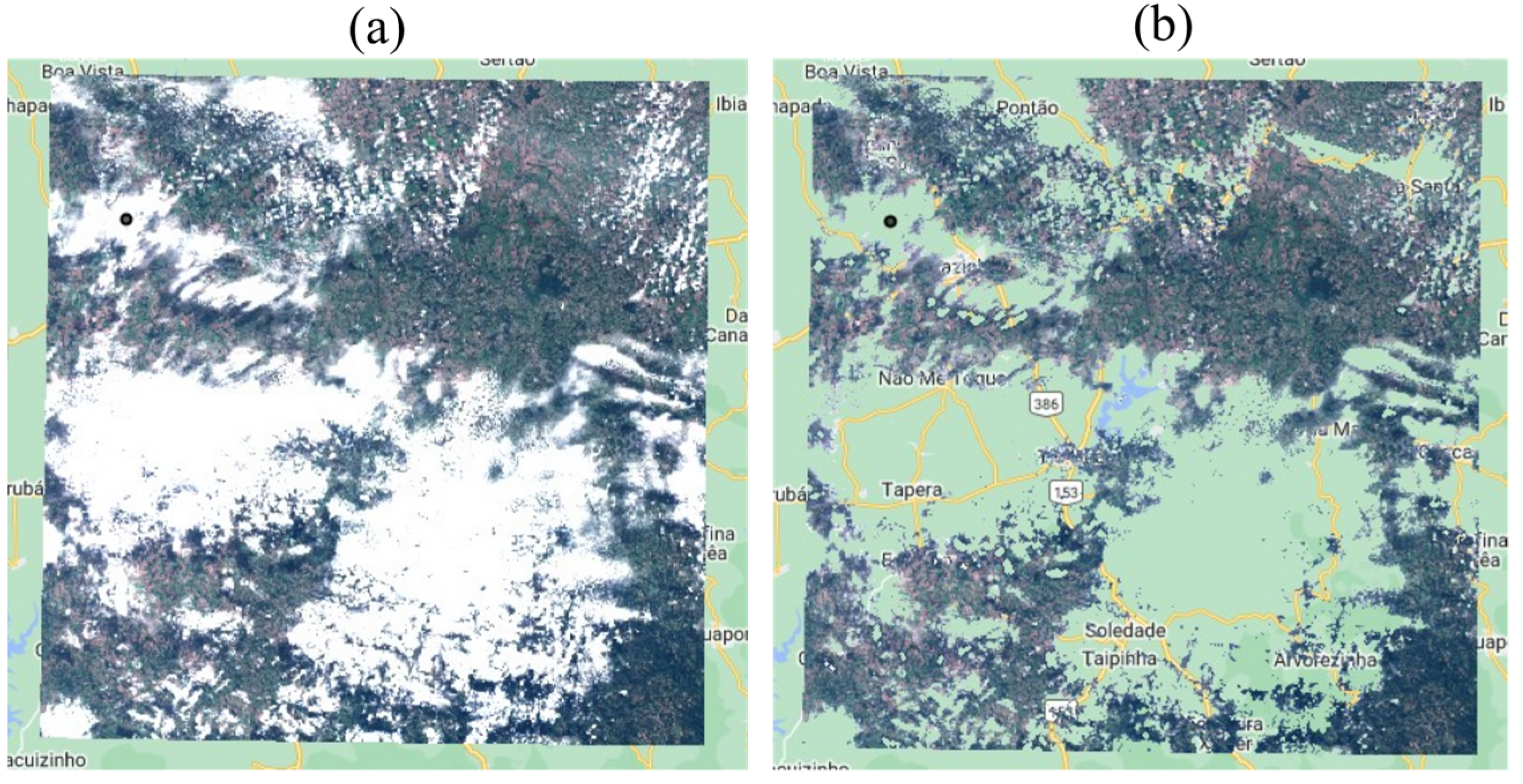
2.1.5. Cloud and Cloud Shadow Masking
2.1.6. View and Illumination Angles (BRDF) Adjustment
2.1.7. Spatial Co-Registration between Landsat and Sentinel-2
2.1.8. Reproject and Resample
2.2. Descriptive and Statistical Analysis
2.3. Ground Reference Data
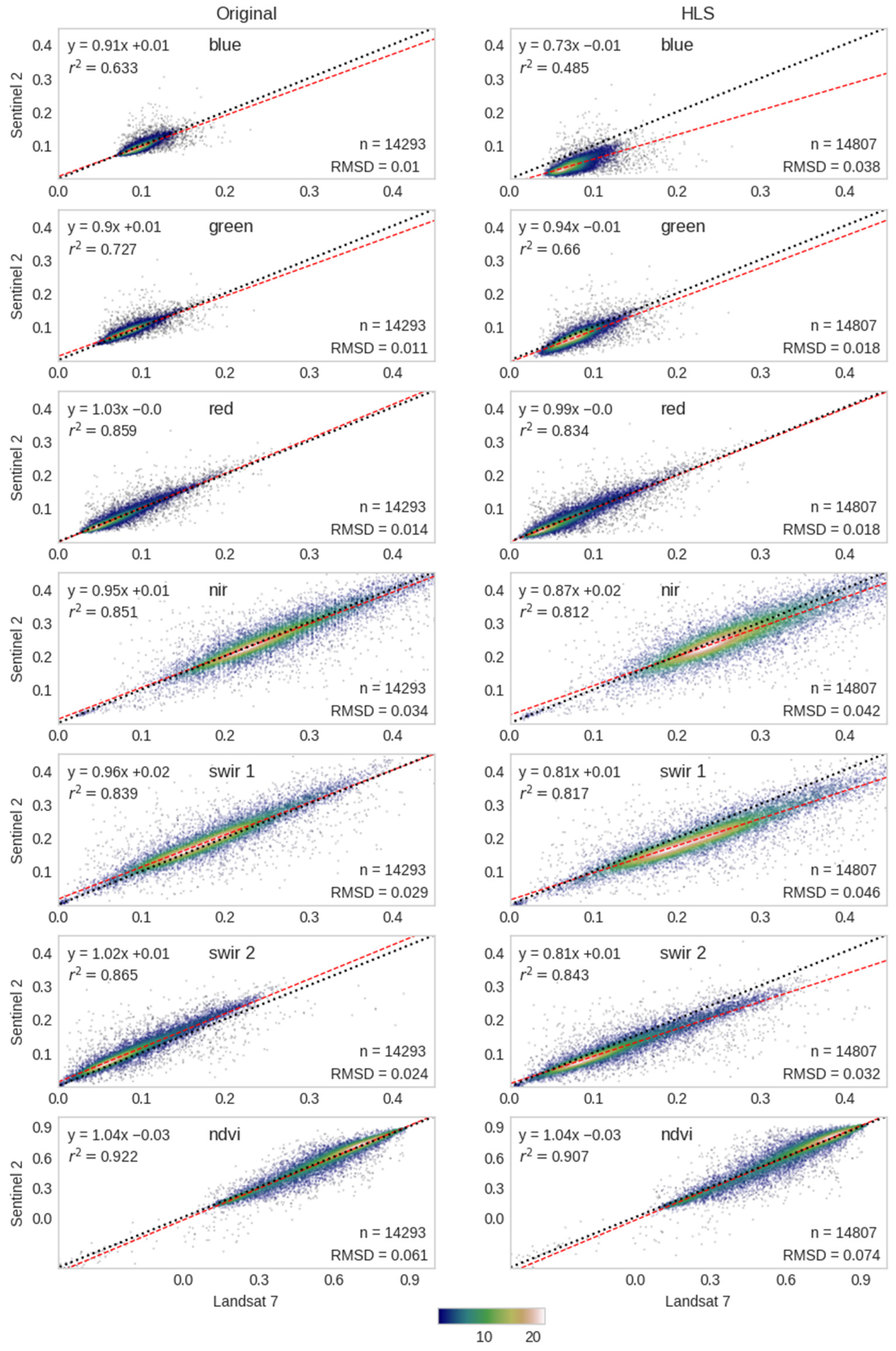
2.4. Application Examples and Comparison with NASA HLS
3. Results
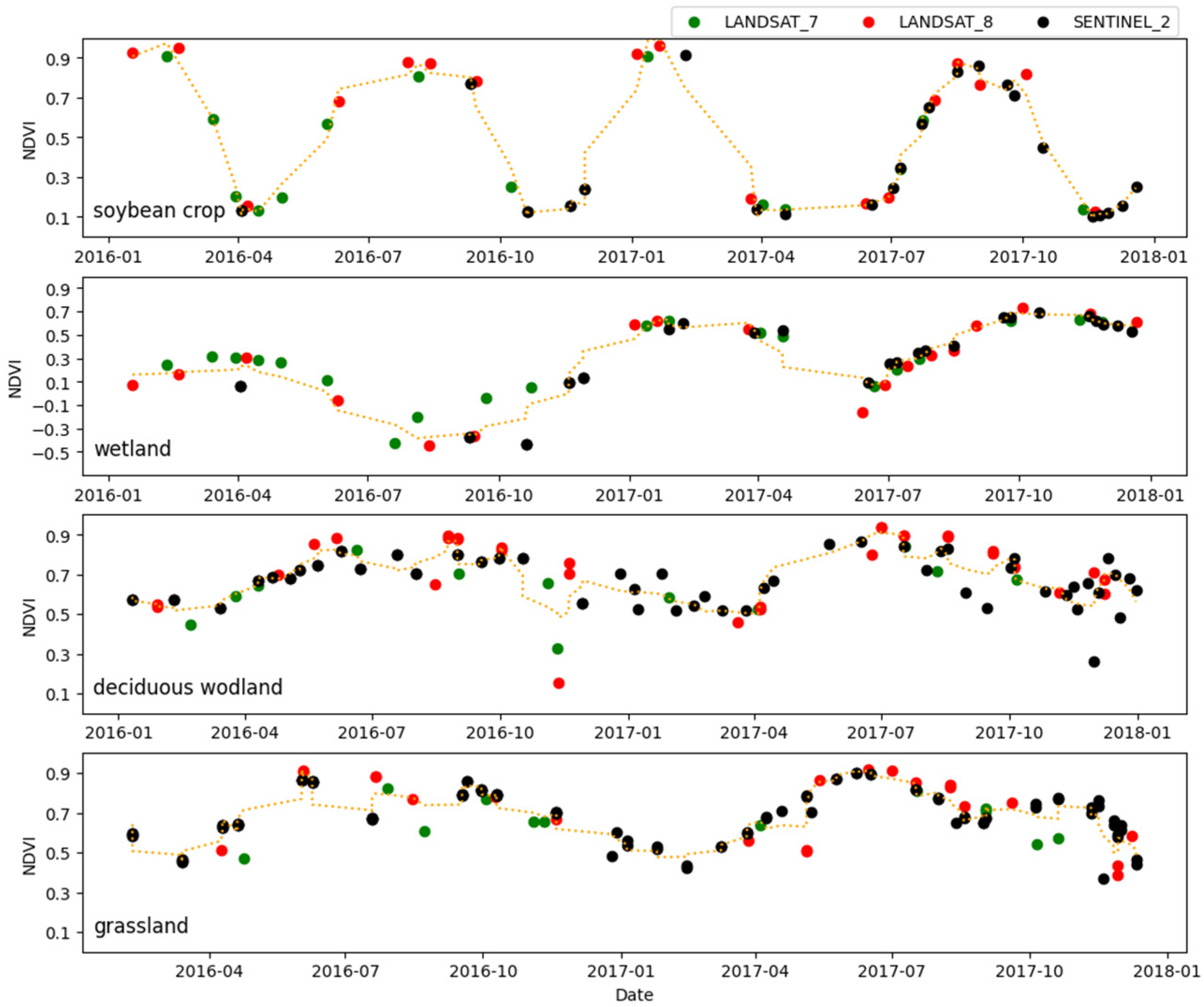
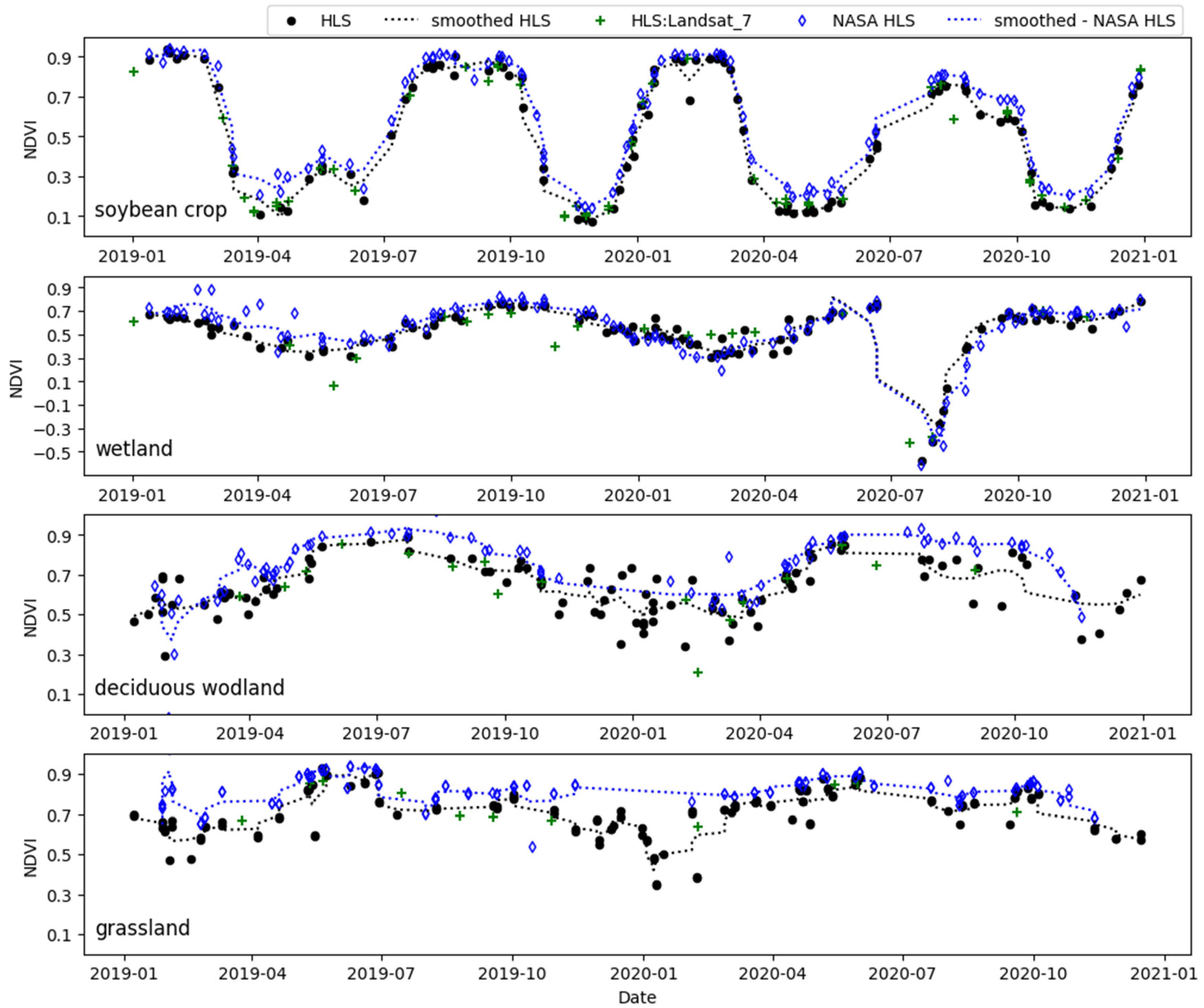
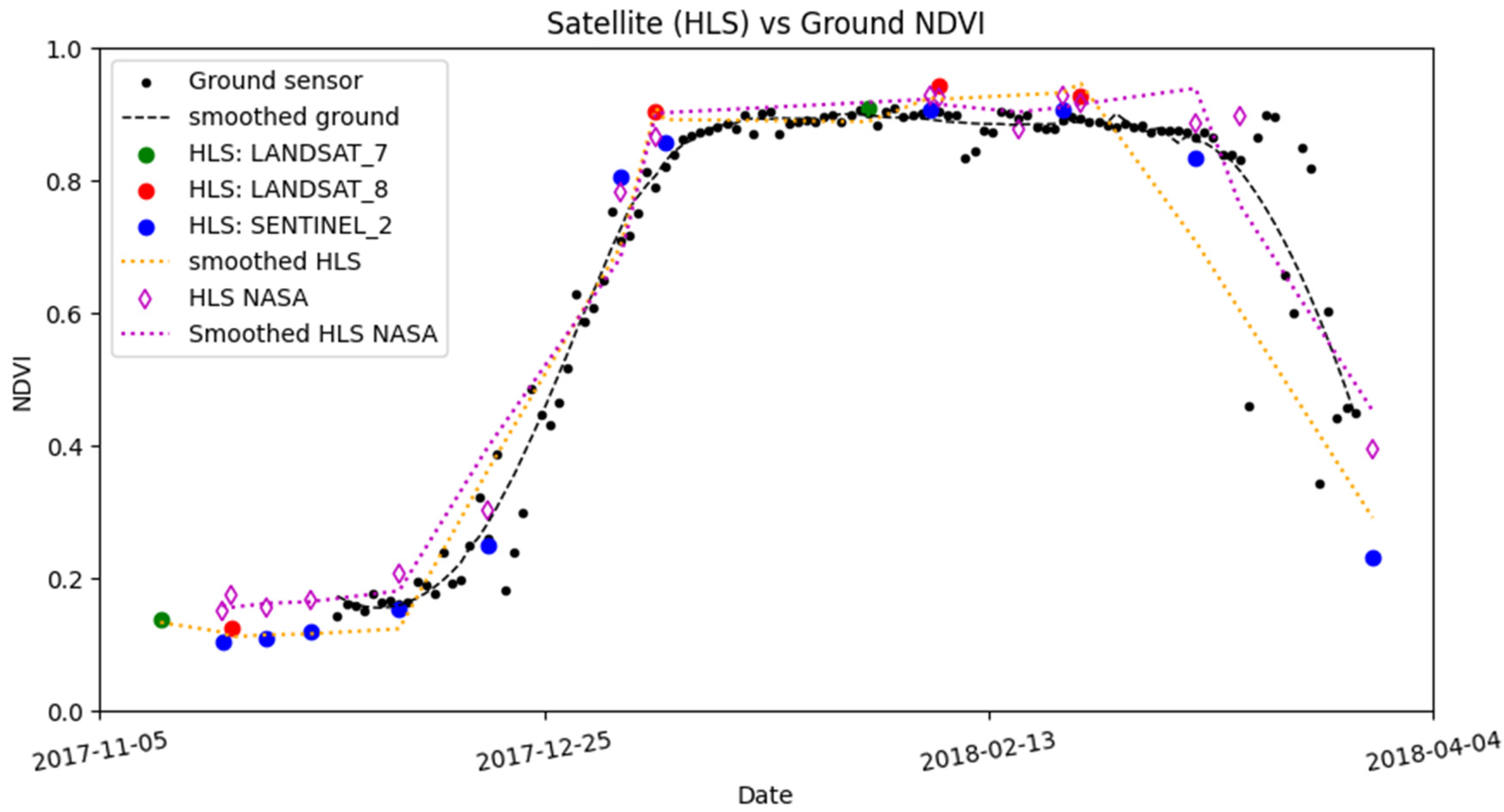
3.1. Comparing with Ground NDVI
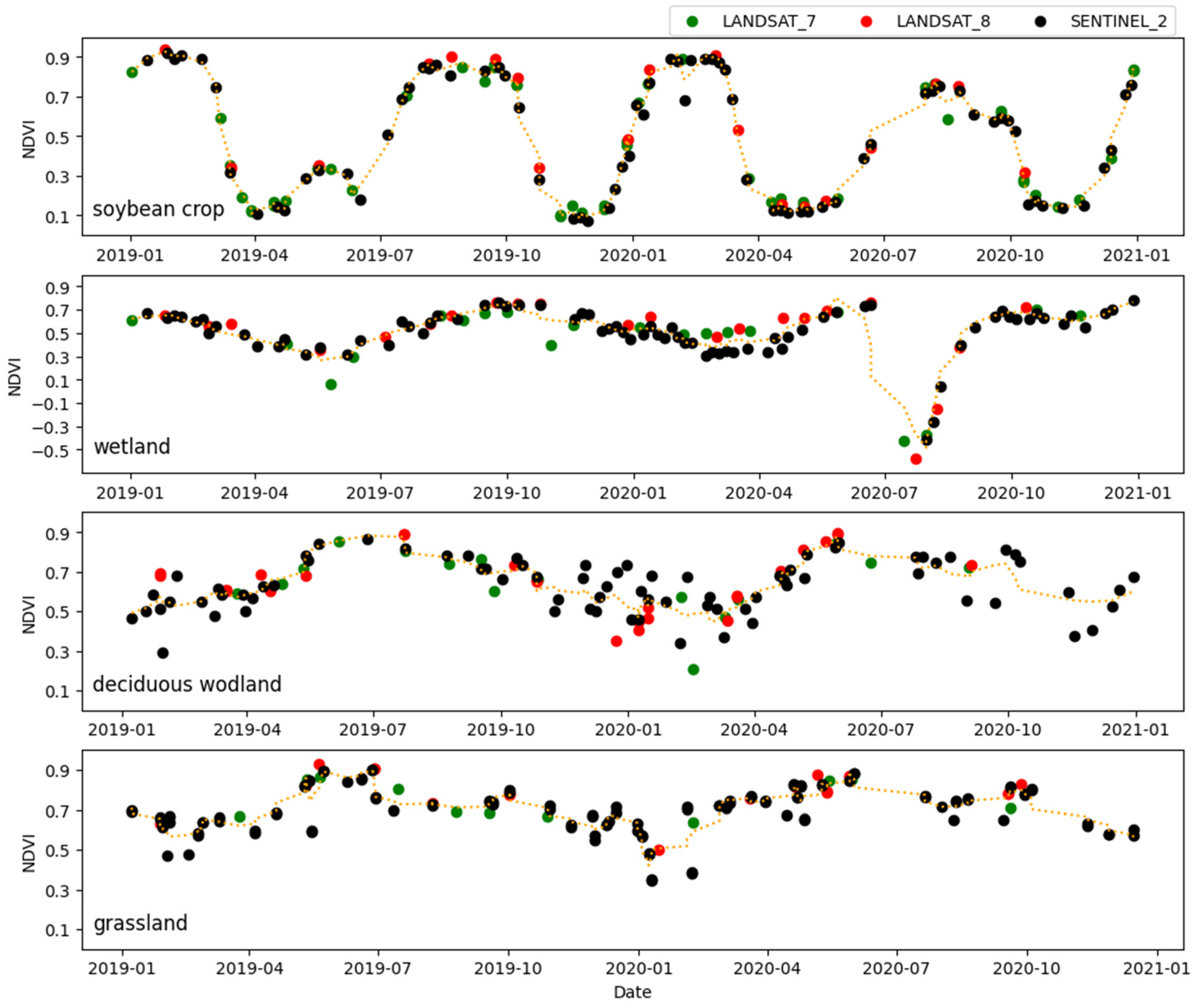
3.2. Example of Applications
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

References
- Bolton, D.K.; Gray, J.M.; Melaas, E.K.; Moon, M.; Eklundh, L.; Friedl, M.A. Continental-scale land surface phenology from harmonized Landsat 8 and Sentinel-2 imagery. Remote Sens. Environ. 2020, 240, 111685. [Google Scholar] [CrossRef]
- Sun, L.; Gao, F.; Xie, D.; Anderson, M.; Chen, R.; Yang, Y.; Chen, Z. Reconstructing daily 30 m NDVI over complex agricultural landscapes using a crop reference curve approach. Remote Sens. Environ. 2020, 253, 112156. [Google Scholar] [CrossRef]
- Chaves, M.E.D.; Picoli, M.C.A.; Sanches, I.D. Recent Applications of Landsat 8/OLI and Sentinel-2/MSI for Land Use and Land Cover Mapping: A Systematic Review. Remote Sens. 2020, 12, 3062. [Google Scholar] [CrossRef]
- Berra, E.F.; Gaulton, R.; Barr, S. Assessing spring phenology of a temperate woodland: A multiscale comparison of ground, unmanned aerial vehicle and Landsat satellite observations. Remote Sens. Environ. 2019, 223, 229–242. [Google Scholar] [CrossRef]
- Claverie, M.; Ju, J.; Masek, J.G.; Dungan, J.L.; Vermote, E.F.; Roger, J.-C.; Skakun, S.V.; Justice, C. The Harmonized Landsat and Sentinel-2 surface reflectance data set. Remote Sens. Environ. 2018, 219, 145–161. [Google Scholar] [CrossRef]
- Moreno-Martínez, Á.; Izquierdo-Verdiguier, E.; Maneta, M.P.; Camps-Valls, G.; Robinson, N.; Muñoz-Marí, J.; Sedano, F.; Clinton, N.; Running, S.W. Multispectral high resolution sensor fusion for smoothing and gap-filling in the cloud. Remote Sens. Environ. 2020, 247, 111901. [Google Scholar] [CrossRef] [PubMed]
- Frantz, D. FORCE—Landsat + Sentinel-2 Analysis Ready Data and Beyond. Remote Sens. 2019, 11, 1124. [Google Scholar] [CrossRef]
- NASA. Harmonized Landsat and Sentinel-2. Available online: https://hls.gsfc.nasa.gov/ (accessed on 7 February 2021).
- Li, J.; Roy, D.P. A Global Analysis of Sentinel-2A, Sentinel-2B and Landsat-8 Data Revisit Intervals and Implications for Terrestrial Monitoring. Remote Sens. 2017, 9, 902. [Google Scholar] [CrossRef]
- Zhang, H.K.; Roy, D.P.; Yan, L.; Li, Z.; Huang, H.; Vermote, E.; Skakun, S.; Roger, J.-C. Characterization of Sentinel-2A and Landsat-8 top of atmosphere, surface, and nadir BRDF adjusted reflectance and NDVI differences. Remote Sens. Environ. 2018, 215, 482–494. [Google Scholar] [CrossRef]
- Chastain, R.; Housman, I.; Goldstein, J.; Finco, M.; Tenneson, K. Empirical cross sensor comparison of Sentinel-2A and 2B MSI, Landsat-8 OLI, and Landsat-7 ETM+ top of atmosphere spectral characteristics over the conterminous United States. Remote Sens. Environ. 2018, 221, 274–285. [Google Scholar] [CrossRef]
- Flood, N. Comparing Sentinel-2A and Landsat 7 and 8 Using Surface Reflectance over Australia. Remote Sens. 2017, 9, 659. [Google Scholar] [CrossRef]
- Mandanici, E.; Bitelli, G. Preliminary Comparison of Sentinel-2 and Landsat 8 Imagery for a Combined Use. Remote Sens. 2016, 8, 1014. [Google Scholar] [CrossRef]
- Drusch, M.; Del Bello, U.; Carlier, S.; Colin, O.; Fernandez, V.; Gascon, F.; Hoersch, B.; Isola, C.; Laberinti, P.; Martimort, P.; et al. Sentinel-2: ESA’s Optical High-Resolution Mission for GMES Operational Services. Remote Sens. Environ. 2012, 120, 25–36. [Google Scholar] [CrossRef]
- Wulder, M.A.; Hilker, T.; White, J.C.; Coops, N.C.; Masek, J.G.; Pflugmacher, D.; Crevier, Y. Virtual constellations for global terrestrial monitoring. Remote Sens. Environ. 2015, 170, 62–76. [Google Scholar] [CrossRef]
- Kington, J.; Collison, A. Scene Level Normalization and Harmonization of Planet Dove Imagery. February 2022. Available online: https://assets.planet.com/docs/scene_level_normalization_of_planet_dove_imagery.pdf (accessed on 19 May 2024).
- Peng, D.; Wang, Y.; Xian, G.; Huete, A.R.; Huang, W.; Shen, M.; Wang, F.; Yu, L.; Liu, L.; Xie, Q.; et al. Investigation of land surface phenology detections in shrublands using multiple scale satellite data. Remote Sens. Environ. 2020, 252, 112133. [Google Scholar] [CrossRef]
- Ju, J.; Masek, J.G. Harmonized Landsat Sentinel-2 (HLS) Product User Guide Product Version 2.0. 2024. Available online: https://lpdaac.usgs.gov/products/hlsl30v002/ (accessed on 17 June 2024).
- Masek, J.G.; Ju, J. HLS Sentinel-2 MSI Surface Reflectance Daily Global 30 m V1.5. NASA EOSDIS Land Processes DAAC. Available online: https://lpdaac.usgs.gov/products/hlss30v015/ (accessed on 23 February 2021).
- Masek, J.G.; Ju, J. HLS Sentinel-2 MSI Surface Reflectance Daily Global 30m v2.0. Available online: https://lpdaac.usgs.gov/products/hlss30v002/ (accessed on 17 June 2024).
- Masek, J.G.; Ju, J. HLS Operational Land Imager Surface Reflectance and TOA Brightness Daily Global 30 m v2.0. Available online: https://cmr.earthdata.nasa.gov/search/concepts/C2021957657-LPCLOUD/35 (accessed on 17 June 2024).
- Saunier, S.; Louis, J.; Debaecker, V.; Beaton, T.; Cadau, E.G.; Boccia, V.; Gascon, F. Sen2like, A Tool To Generate Sentinel-2 Harmonised Surface Reflectance Products—First Results with Landsat-8. In Proceedings of the IGARSS 2019—2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 5650–5653. [Google Scholar]
- Saunier, S.; Louis, J.; Gascon, F.; Cadau, E.G.; Debaecker, V.; Claverie, M.; Boccia, V. Sentinel-2 Harmonised Surface Reflectance Products with Sen2like. Phase 1 status. In Proceedings of the ESA PHI WEEK 2020, Virtual, 28 September–2 October 2020; p. 21. [Google Scholar] [CrossRef]
- Nguyen, M.D.; Baez-Villanueva, O.M.; Bui, D.D.; Nguyen, P.T.; Ribbe, L. Harmonization of Landsat and Sentinel 2 for Crop Monitoring in Drought Prone Areas: Case Studies of Ninh Thuan (Vietnam) and Bekaa (Lebanon). Remote Sens. 2020, 12, 281. [Google Scholar] [CrossRef]
- Sudmanns, M.; Tiede, D.; Lang, S.; Bergstedt, H.; Trost, G.; Augustin, H.; Baraldi, A.; Blaschke, T. Big Earth data: Disruptive changes in Earth observation data management and analysis? Int. J. Digit. Earth 2020, 13, 832–850. [Google Scholar] [CrossRef] [PubMed]
- Descalsferrando, A.; Verger, A.; Yin, G.; Penuelas, J. A Threshold Method for Robust and Fast Estimation of Land-Surface Phenology Using Google Earth Engine. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 14, 601–606. [Google Scholar] [CrossRef]
- Gorelick, N.; Hancher, M.; Dixon, M.; Ilyushchenko, S.; Thau, D.; Moore, R. Google Earth Engine: Planetary-scale geospatial analysis for everyone. Remote Sens. Environ. 2017, 202, 18–27. [Google Scholar] [CrossRef]
- USGS. Landsat 7 (L7) Data Users Handbook—Version 2.0. Available online: https://www.usgs.gov/media/files/landsat-7-data-users-handbook (accessed on 3 March 2021).
- USGS. Landsat 8 (L8) Data Users Handbook—Version 5.0. Available online: https://www.usgs.gov/media/files/landsat-8-data-users-handbook (accessed on 3 March 2021).
- ESA. Sentinel-2 User Handbook. ESA Standard Document. Available online: https://sentinels.copernicus.eu/web/sentinel/user-guides/document-library/-/asset_publisher/xlslt4309D5h/content/sentinel-2-user-handbook (accessed on 3 March 2021).
- Barsi, J.A.; Lee, K.; Kvaran, G.; Markham, B.L.; Pedelty, J.A. The Spectral Response of the Landsat-8 Operational Land Imager. Remote Sens. 2014, 6, 10232–10251. [Google Scholar] [CrossRef]
- Markham, B.L.; Storey, J.C.; Williams, D.L.; Irons, J.R. Landsat sensor performance: History and current status. IEEE Trans. Geosci. Remote Sens. 2004, 42, 2691–2694. [Google Scholar] [CrossRef]
- Yin, F.; Lewis, P.E.; Gómez-Dans, J.L. Bayesian atmospheric correction over land: Sentinel-2/MSI and Landsat 8/OLI. Geosci. Model Dev. 2022, 15, 7933–7976. [Google Scholar] [CrossRef]
- Song, R.; Muller, J.-P.; Kharbouche, S.; Yin, F.; Woodgate, W.; Kitchen, M.; Roland, M.; Arriga, N.; Meyer, W.; Koerber, G.; et al. Validation of Space-Based Albedo Products from Upscaled Tower-Based Measurements Over Heterogeneous and Homogeneous Landscapes. Remote Sens. 2020, 12, 833. [Google Scholar] [CrossRef]
- Lyapustin, A.; Wang, Y.; Korkin, S.; Huang, D. MODIS Collection 6 MAIAC algorithm. Atmospheric Meas. Tech. 2018, 11, 5741–5765. [Google Scholar] [CrossRef]
- USGS. Landsat Collection 1 Level-1 Quality Assessment Band. Available online: https://www.usgs.gov/core-science-systems/nli/landsat/landsat-collection-1-level-1-quality-assessment-band?qt-science_support_page_related_con=0#qt-science_support_page_related_con (accessed on 3 December 2020).
- Foga, S.; Scaramuzza, P.L.; Guo, S.; Zhu, Z.; Dilley, R.D.; Beckmann, T.; Schmidt, G.L.; Dwyer, J.L.; Hughes, M.J.; Laue, B. Cloud detection algorithm comparison and validation for operational Landsat data products. Remote Sens. Environ. 2017, 194, 379–390. [Google Scholar] [CrossRef]
- USGS. CFMask Algorithm. Available online: https://www.usgs.gov/core-science-systems/nli/landsat/cfmask-algorithm (accessed on 3 December 2020).
- Pasquarella, V.J.; Brown, C.F.; Czerwinski, W.; Rucklidge, W.J. Comprehensive quality assessment of optical satellite imagery using weakly supervised video learning. In Proceedings of the 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Vancouver, BC, Canada, 17–24 June 2023; pp. 2125–2135. [Google Scholar]
- Roy, D.P.; Li, J.; Zhang, H.K.; Yan, L.; Huang, H.; Li, Z. Examination of Sentinel-2A multi-spectral instrument (MSI) reflectance anisotropy and the suitability of a general method to normalize MSI reflectance to nadir BRDF adjusted reflectance. Remote Sens. Environ. 2017, 199, 25–38. [Google Scholar] [CrossRef]
- Roy, D.; Zhang, H.; Ju, J.; Gomez-Dans, J.; Lewis, P.; Schaaf, C.; Sun, Q.; Li, J.; Huang, H.; Kovalskyy, V. A general method to normalize Landsat reflectance data to nadir BRDF adjusted reflectance. Remote Sens. Environ. 2016, 176, 255–271. [Google Scholar] [CrossRef]
- Roy, D.P.; Huang, H.; Boschetti, L.; Giglio, L.; Yan, L.; Zhang, H.H.; Li, Z. Landsat-8 and Sentinel-2 burned area mapping—A combined sensor multi-temporal change detection approach. Remote Sens. Environ. 2019, 231, 111254. [Google Scholar] [CrossRef]
- Strahler, A.; Lucht, W.; Schaaf, C.; Tsang, T.; Gao, F.; Muller, J. MODIS BRDF/Albedo Product: Algorithm Theoretical Basis Document Version 5.0. 1999. Available online: https://modis.gsfc.nasa.gov/data/atbd/atbd_mod09.pdf (accessed on 23 June 2024).
- Poortinga, A.; Tenneson, K.; Shapiro, A.; Nquyen, Q.; Aung, K.S.; Chishtie, F.; Saah, D. Mapping Plantations in Myanmar by Fusing Landsat-8, Sentinel-2 and Sentinel-1 Data along with Systematic Error Quantification. Remote Sens. 2019, 11, 831. [Google Scholar] [CrossRef]
- Stumpf, A.; Michéa, D.; Malet, J.-P. Improved Co-Registration of Sentinel-2 and Landsat-8 Imagery for Earth Surface Motion Measurements. Remote Sens. 2018, 10, 160. [Google Scholar] [CrossRef]
- Storey, J.; Roy, D.P.; Masek, J.; Gascon, F.; Dwyer, J.; Choate, M. A note on the temporary misregistration of Landsat-8 Operational Land Imager (OLI) and Sentinel-2 Multi Spectral Instrument (MSI) imagery. Remote Sens. Environ. 2016, 186, 121–122. [Google Scholar] [CrossRef]
- Rengarajan, R.; Storey, J.C.; Choate, M.J. Harmonizing the Landsat Ground Reference with the Sentinel-2 Global Reference Image Using Space-Based Bundle Adjustment. Remote Sens. 2020, 12, 3132. [Google Scholar] [CrossRef]
- ESA. S2 MPC: L1C Data Quality Report (Reference: S2-PDGS-MPC-DQR). 2021. Available online: https://sentinels.copernicus.eu/documents/247904/2488917/Sentinel-2_L1C_Data_Quality_Report/6ad66f15-48ca-4e65-b304-59ef00b7f0e0 (accessed on 24 June 2024).
- Gascon, F.; Bouzinac, C.; Thépaut, O.; Jung, M.; Francesconi, B.; Louis, J.; Lonjou, V.; Lafrance, B.; Massera, S.; Gaudel-Vacaresse, A.; et al. Copernicus Sentinel-2A Calibration and Products Validation Status. Remote Sens. 2017, 9, 584. [Google Scholar] [CrossRef]
- Clerc, S.; Van Malle, M.N.; Massera, S.; Quang, C.; Chambrelan, A.; Guyot, F.; Pessiot, L.; Iannone, R.; Boccia, V. Copernicus SENTINEL-2 Geometric Calibration Status. In Proceedings of the IGARSS 2021—2021 IEEE International Geoscience and Remote Sensing Symposium, Brussels, Belgium, 11–16 July 2021; pp. 8170–8172. [Google Scholar]
- USGS. Landsat Collection 2 Level-1 Data. Landsat Missions. Available online: https://www.usgs.gov/landsat-missions/landsat-collection-2-level-1-data (accessed on 13 December 2021).
- USGS. Landsat GCP Updates. Landsat Missions. Available online: https://www.usgs.gov/landsat-missions/landsat-gcp-updates (accessed on 13 December 2021).
- Fontana, D.C.; Dalmago, G.A.; Schirmbeck, J.; Schirmbeck, L.W.; Fernandes, J.M.C. Modificações Na Quantidade e Qualidade Da Radiação Solar Ao Atravessar a Atmosfera e Interagir Com Plantas de Soja. Agrometeoros 2020, 27. [Google Scholar] [CrossRef]
- Schirmbeck, L.W.; Fontana, D.C.; Dalmago, G.A.; Schirmbeck, J.; Vargas, P.R.; Fernandes, J.M.C. Condições Hídricas de Lavoura de Soja Usando Sensoriamento Remoto Terrestre. Agrometeoros 2020, 27. [Google Scholar] [CrossRef]
- AppEEARS Team. Application for Extracting and Exploring Analysis Ready Samples (AppEEARS). Ver. 3.55. NASA EOSDIS Land Processes Distributed Active Archive Center (LP DAAC), USGS/Earth Resources Observation and Science (EROS) Center. Available online: https://appeears.earthdatacloud.nasa.gov/ (accessed on 25 June 2024).
- Roy, D.P.; Kovalskyy, V.; Zhang, H.K.; Vermote, E.F.; Yan, L.; Kumar, S.S.; Egorov, A. Characterization of Landsat-7 to Landsat-8 reflective wavelength and normalized difference vegetation index continuity. Remote Sens. Environ. 2016, 185, 57–70. [Google Scholar] [CrossRef] [PubMed]
- Berra, E.F.; Gaulton, R.; Barr, S. Commercial off-the-shelf digital cameras on unmanned aerial vehicles for multitemporal monitoring of vegetation reflectance and NDVI. IEEE Trans. Geosci. Remote Sens. 2017, 55, 4878–4886. [Google Scholar] [CrossRef]
- Gao, F.; Jin, Y.; Schaaf, C.; Strahler, A. Bidirectional NDVI and atmospherically resistant BRDF inversion for vegetation canopy. IEEE Trans. Geosci. Remote Sens. 2002, 40, 1269–1278. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, J.; Henebry, G.M.; Gao, F. Development and evaluation of a new algorithm for detecting 30 m land surface phenology from VIIRS and HLS time series. ISPRS J. Photogramm. Remote Sens. 2020, 161, 37–51. [Google Scholar] [CrossRef]
- Brown, C.F.; Brumby, S.P.; Guzder-Williams, B.; Birch, T.; Hyde, S.B.; Mazzariello, J.; Czerwinski, W.; Pasquarella, V.J.; Haertel, R.; Ilyushchenko, S.; et al. Dynamic World, Near real-time global 10 m land use land cover mapping. Sci. Data 2022, 9, 251. [Google Scholar] [CrossRef]
- White, K.; Pontius, J.; Schaberg, P. Remote sensing of spring phenology in northeastern forests: A comparison of methods, field metrics and sources of uncertainty. Remote Sens. Environ. 2014, 148, 97–107. [Google Scholar] [CrossRef]
- D’Odorico, P.; Gonsamo, A.; Damm, A.; Schaepman, M.E. Experimental Evaluation of Sentinel-2 Spectral Response Functions for NDVI Time-Series Continuity. IEEE Trans. Geosci. Remote Sens. 2013, 51, 1336–1348. [Google Scholar] [CrossRef]
- Helder, D.; Markham, B.; Morfitt, R.; Storey, J.; Barsi, J.; Gascon, F.; Clerc, S.; LaFrance, B.; Masek, J.; Roy, D.P.; et al. Observations and Recommendations for the Calibration of Landsat 8 OLI and Sentinel 2 MSI for Improved Data Interoperability. Remote Sens. 2018, 10, 1340. [Google Scholar] [CrossRef]
- Armitage, R.P.; Ramirez, F.A.; Danson, F.M.; Ogunbadewa, E.Y. Probability of cloud-free observation conditions across Great Britain estimated using MODIS cloud mask. Remote Sens. Lett. 2013, 4, 427–435. [Google Scholar] [CrossRef]
- Leblon, B.; Gallant, L.; Granberg, H. Effects of shadowing types on ground-measured visible and near-infrared shadow reflectances. Remote Sens. Environ. 1996, 58, 322–328. [Google Scholar] [CrossRef]
- Amani, M.; Ghorbanian, A.; Ahmadi, S.A.; Kakooei, M.; Moghimi, A.; Mirmazloumi, S.M.; Moghaddam, S.H.A.; Mahdavi, S.; Ghahremanloo, M.; Parsian, S.; et al. Google Earth Engine Cloud Computing Platform for Remote Sensing Big Data Applications: A Comprehensive Review. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 5326–5350. [Google Scholar] [CrossRef]
- Minnaert, M. The reciprocity principle in lunar photometry. Astrophys. J. 1941, 93, 403–410. [Google Scholar] [CrossRef]
- Teillet, P.; Guindon, B.; Goodenough, D. On the Slope-Aspect Correction of Multispectral Scanner Data. Can. J. Remote Sens. 1982, 8, 84–106. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| L7 ETM+ | L8 OLI | S2 MSI | |
|---|---|---|---|
| Radiometric resolution | 8-bit | 12-bit | 12-bit |
| Equatorial crossing time | 10:00–10:15 | 10:00–10:15 | 10:30 |
| Swath/field of view | 183 km/15° (±7.5°) | 183 km/15° (±7.5°) | 290 km/20.6° (±10.3°) |
| Orbit altitude | 705 km | 705 km | 786 km |
| Revisit frequency | 16 days | 16 days | 4–5 days |
| Launch date | 15 April 1999 | 11 February 2013 | S2-A: 23 June 2015 S2-B: 7 March 2017 |
| HLS Equivalent Name | Original Band Number [Spatial Resolution, Central Wavelength 1] | ||
|---|---|---|---|
| L7 ETM+ | L8 OLI | S2 MSI | |
| Blue | B1 [30 m, 483 nm] | B2 [30 m, 482 nm] | B2 [10 m, 497 nm] |
| Green | B2 [30 m, 560 nm] | B3 [30 m, 561 nm] | B3 [10 m, 560 nm] |
| Red | B3 [30 m, 662 nm] | B4 [30 m, 655 nm] | B4 [10 m, 664 nm] |
| NIR | B4 [30 m, 835 nm] | B5 [30 m, 865 nm] | B8 [10 m, 843 nm] |
| SWIR1 | B5 [30 m, 1641 nm] | B6 [30 m, 1609 nm] | B11 [20 m, 1613 nm] |
| SWIR2 | B7 [30 m, 2206 nm] | B7 [30 m, 2201 nm] | B12 [20 m, 2200 nm] |
| HLS Equivalent Name | L8 Intercept | L8 Slope | L7 Intercept | L7 Slope |
|---|---|---|---|---|
| Blue | −0.0107 | 1.0946 | −0.0139 | 1.1060 |
| Green | 0.0026 | 1.0043 | 0.0041 | 0.9909 |
| Red | −0.0015 | 1.0524 | −0.0024 | 1.0568 |
| NIR | 0.0033 | 0.8954 | −0.0076 | 1.0045 |
| SWIR1 | 0.0065 | 1.0049 | 0.0041 | 1.0361 |
| SWIR2 | 0.0046 | 1.0002 | 0.0086 | 1.0401 |
| MODIS Band | fiso | fgeo | fvol | HLS Equivalent Name |
|---|---|---|---|---|
| 3 (blue, 469 nm) | 0.0774 | 0.0079 | 0.0372 | Blue |
| 4 (green, 555 nm) | 0.1306 | 0.0178 | 0.058 | Green |
| 1 (red, 645 nm) | 0.169 | 0.0227 | 0.0574 | Red |
| 2 (NIR, 858 nm) | 0.3093 | 0.033 | 0.1535 | NIR |
| 6 (SWIR, 1641 nm) | 0.343 | 0.0453 | 0.1154 | SWIR1 |
| 7 (SWIR, 2130 nm) | 0.2658 | 0.0387 | 0.0639 | SWIR2 |
| Pair | Acquisition Time (GMT 1) | Image ID | |
|---|---|---|---|
| Brazil | L8-S2 | 6 August 2019 13:24 | ‘LANDSAT/LC08/C01/T1_TOA/LC08_222080_20190806’ |
| 6 August 2019 13:40 | ‘COPERNICUS/S2/20190806T133231_20190806T133228_T22JCP’ | ||
| L7-S2 | 18 November 2019 13:07 | ‘LANDSAT/LE07/C01/T1_TOA/LE07_222080_20191118’ | |
| 19 November 2019 13:40 | ‘COPERNICUS/S2/20191119T133219_20191119T133222_T22JCP’ | ||
| UK | L8-S2 | 20 April 2020 11:09 | ‘LANDSAT/LC08/C01/T1_TOA/LC08_204021_20200420’ |
| 19 April 2020 11:25 | ‘COPERNICUS/S2/20200419T112111_20200419T112443_T30UWG’ | ||
| L7-S2 | 21 April 2020 10:38 | ‘LANDSAT/LE07/C01/T1_TOA/LE07_203022_20200421’ | |
| 19 April 2020 11:25 | ‘COPERNICUS/S2/20200419T112111_20200419T112443_T30UWG’ |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Berra, E.F.; Fontana, D.C.; Yin, F.; Breunig, F.M. Harmonized Landsat and Sentinel-2 Data with Google Earth Engine. Remote Sens. 2024, 16, 2695. https://doi.org/10.3390/rs16152695
Berra EF, Fontana DC, Yin F, Breunig FM. Harmonized Landsat and Sentinel-2 Data with Google Earth Engine. Remote Sensing. 2024; 16(15):2695. https://doi.org/10.3390/rs16152695
Chicago/Turabian StyleBerra, Elias Fernando, Denise Cybis Fontana, Feng Yin, and Fabio Marcelo Breunig. 2024. "Harmonized Landsat and Sentinel-2 Data with Google Earth Engine" Remote Sensing 16, no. 15: 2695. https://doi.org/10.3390/rs16152695
APA StyleBerra, E. F., Fontana, D. C., Yin, F., & Breunig, F. M. (2024). Harmonized Landsat and Sentinel-2 Data with Google Earth Engine. Remote Sensing, 16(15), 2695. https://doi.org/10.3390/rs16152695