
Accurate Calculation of Upper Biomass Volume of Single Trees Using Matrixial Representation of LiDAR Data




Abstract
1. Introduction
1.1. Related Works
1.2. Methods for Calculating Trees Biomass
2. Datasets
3. Geometric Structures for Tree Biomass Modeling
3.1. Trunk Extraction and Modeling
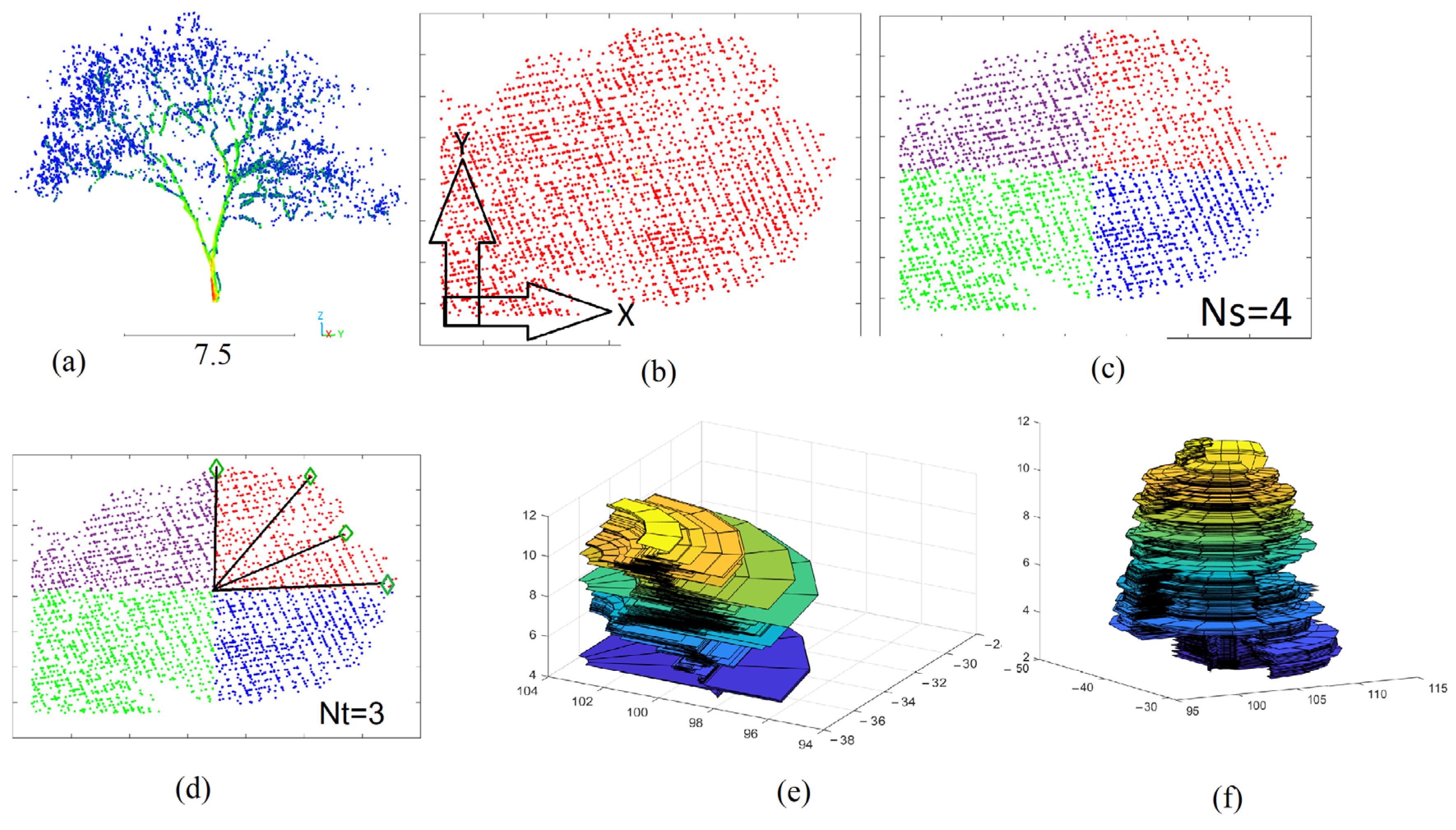
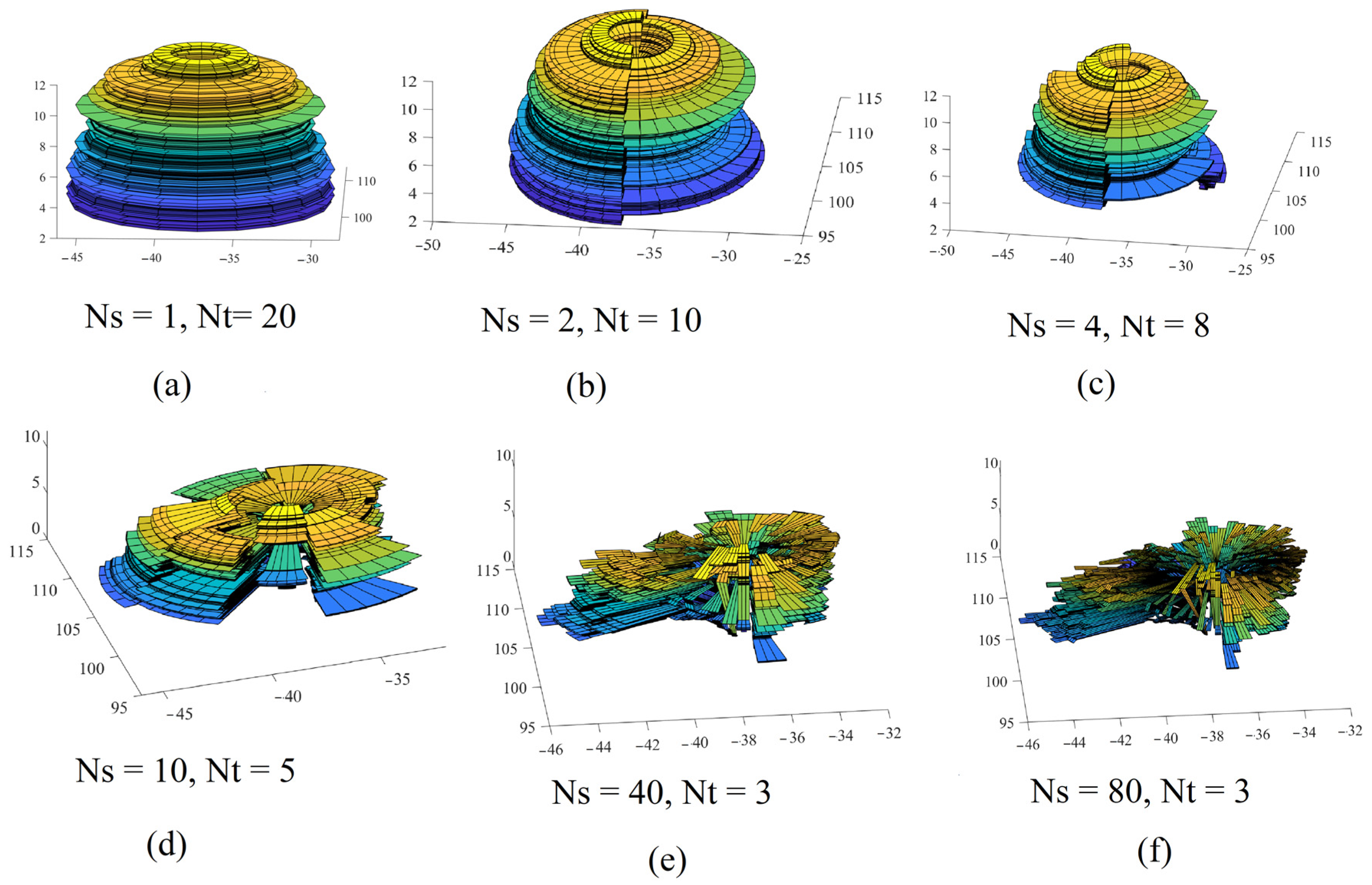
3.2. Crown Biomass Calculation
4. Discussion
5. Accuracy Analysis
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Tao, F.; Xiao, B.; Qi, Q.; Cheng, J.; Ji, P. Digital twin modeling. J. Manuf. Syst. 2022, 64, 372–389. [Google Scholar] [CrossRef]
- Hakimi, O.; Liu, H.; Abudayyeh, O.; Houshyar, A.; Almatared, M.; Alhawiti, A. Data Fusion for Smart Civil Infrastructure Management: A Conceptual Digital Twin Framework. Buildings 2023, 13, 2725. [Google Scholar] [CrossRef]
- Ahmad, A.M.; Aliyu, A.A. The need for landscape information modelling (LIM) in landscape architecture. In Proceedings of the 13th Digital Landscape Architecture Conference, Weimar, Germany, 31 May–2 June 2012; p. 40. [Google Scholar]
- Song, J.; Park, S.; Lee, K.; Bae, J.; Kwon, S.; Cho, C.-S.; Chung, S. Augmented Reality-Based BIM Data Compatibility Verification Method for FAB Digital Twin implementation. Buildings 2023, 13, 2683. [Google Scholar] [CrossRef]
- Mylo, M.D.; Ludwig, F.; Rahman, M.A.; Shu, Q.; Fleckenstein, C.; Speck, T.; Speck, O. Conjoining. Trees for the Provision of Living Architecture in Future Cities: A Long-Term Inosculation Study. Plants 2023, 12, 1385. [Google Scholar] [CrossRef]
- Song, Q.; Albrecht, C.M.; Xiong, Z.; Zhu, X.X. Towards Global Forest Biomass Estimators from Tree Height Data. In Proceedings of the IGARSS 2022–2022 IEEE International Geoscience and Remote Sensing Symposium, Kuala Lumpur, Malaysia, 17–22 July 2022; pp. 5652–5655. [Google Scholar] [CrossRef]
- Antropov, O.; Rauste, Y.; Tegel, K.; Baral, Y.; Junttila, V.; Kauranne, T.; Hame, T.; Praks, J. Tropical Forest Tree Height and Above Ground Biomass Mapping in Nepal Using Tandem-X and ALOS PALSAR Data. In Proceedings of the IGARSS 2018–2018, IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 5334–5336. [Google Scholar] [CrossRef]
- Acuna, M.; Sessions, J.; Zamora, R.; Boston, K.; Brown, M.; Ghaffariyan, M.R. Methods to Manage and Optimize Forest Biomass Supply Chains: A Review. Curr. For. Rep. 2019, 5, 124–141. [Google Scholar] [CrossRef]
- Xu, D.; Wang, H.; Xu, W.; Luan, Z.; Xu, X. LiDAR Applications to Estimate Forest Biomass at Individual Tree Scale: Opportunities, Challenges and Future Perspectives. Forests 2021, 12, 550. [Google Scholar] [CrossRef]
- Solano-Correa, Y.T.; Camacho-De Angulo, Y.V.; Oviedo-Barrero, F.; Dalponte, M.; Pencue-Fierro, E.L. Individual Tree Crown Delineation and Biomass Estimation from LiDAR Data in Gorgona Island, Colombia. In Proceedings of the IGARSS 2023–2023 IEEE International Geoscience and Remote Sensing Symposium, Pasadena, CA, USA, 16–21 July 2023; pp. 3125–3128. [Google Scholar] [CrossRef]
- Uciechowska-Grakowicz, A.; Herrera-Granados, O.; Biernat, S.; Bac-Bronowicz, J. Usage of Airborne LiDAR Data and High-Resolution Remote Sensing Images in Implementing the Smart City Concept. Remote Sens. 2023, 15, 5776. [Google Scholar] [CrossRef]
- Ketterings, Q.M.; Coe, R.; van Noordwijk, M.; Ambagau’, Y.; A Palm, C. Reducing uncertainty in the use of allometric biomass equations for predicting above-ground tree biomass in mixed secondary forests. For. Ecol. Manag. 2001, 146, 199–209. [Google Scholar] [CrossRef]
- Beer, C.; Reichstein, M.; Tomelleri, E.; Ciais, P.; Jung, M.; Carvalhais, N.; Rödenbeck, C.; Arain, M.A.; Baldocchi, D.; Bonan, G.B.; et al. Terrestrial gross carbon dioxide uptake: Global distribution and covari-ation with climate. Science 2010, 329, 834–839. [Google Scholar] [CrossRef]
- Bac-Bronowicz, J.; Uciechowska-Grakowicz, A.; Biernat, S.; Bidzińska, P.; Górecki, A.; Przybyła, T.; Rosicki, M.; Załupka, M. System Ewaluacji Usług Ekosystemowych Zieleni Miejskiej (System for Evaluating Ecosystem Services of Urban Greenery); Oficyna Wydawnicza Politechniki Wrocławskiej: Wrocław, Poland, 2022; pp. 108–110. ISBN 978-83-7493-214-1. Available online: https://www.oficyna.pwr.edu.pl (accessed on 26 March 2024).
- Price, J. Estimating leaf area index from satellite data. IEEE Trans. Geosci. Remote. Sens. 1993, 31, 727–734. [Google Scholar] [CrossRef]
- Bochenek, Z.; Dąbrowska-Zielińska, K.; Gurdak, R.; Niro, F.; Bartold, M.; Grzybowski, P. Validation of the LAI biophysical product derived from Sentinel-2 and Proba-V images for winter wheat in western Poland. Geoinformation 2017, 1, 15–26. [Google Scholar] [CrossRef]
- Fang, H.; Baret, F.; Plummer, S.; Schaepman-Strub, G. An overview of global leaf area index (LAI): Methods, products, validation, and applications. Rev. Geophys. 2019, 57, 739–799. [Google Scholar] [CrossRef]
- De Bock, A.; Belmans, B.; Vanlanduit, S.; Blom, J.; Alvarado-Alvarado, A.A.; Audenaert, A. A review on the leaf area index (LAI) in vertical greening systems. Build. Environ. 2023, 229, 109926. [Google Scholar] [CrossRef]
- Weiss, M.; Baret, F.; Smith, G.J.; Jonckheere, I.; Coppin, P. Review of methods for in situ leaf area index (LAI) determination: Part II. Estimation of LAI, errors and sampling. Agric. For. Meteorol. 2003, 121, 37–53. [Google Scholar] [CrossRef]
- Zani, N.F.; Suratman, M.N. Estimation of above ground biomass of Keniam forests, Taman Negara Pahang. In Proceedings of the IEEE Symposium on Business, Engineering and Industrial Applications (ISBEIA), Langkawi, Malaysia, 25–28 September 2011; pp. 80–83. [Google Scholar] [CrossRef]
- Kato, R.; Tadaki, Y.; Ogawa, H. Plant biomass and growth increment studies in Pasoh Forest Reserve. Malay. Nat. J. 1978, 30, 211–224. Available online: https://api.semanticscholar.org/CorpusID:82565727 (accessed on 26 March 2024).
- Lei, X.; Zhang, H.; Bi, H. Additive aboveground biomass equations for major tree species in over-logged forest region in northeast China. In Proceedings of the IEEE 4th International Symposium on Plant Growth Modeling, Simulation, Visualization and Applications, Shanghai, China, 31 October–3 November 2012; pp. 220–223. [Google Scholar] [CrossRef]
- Tchinmegni, F.I.; Djeukam, P.S.V. Allometric models for estimating above- and belowground biomass of individual trees in Cameroonian submontane forest. MOJ Eco Environ. Sci. 2024, 9, 29–36. [Google Scholar] [CrossRef]
- Gaikadi, S.; Selvaraj, V.K. Allometric model based estimation of biomass and carbon stock for individual and overlapping trees using terrestrial LiDAR. Model. Earth Syst. Environ. 2024, 10, 1771–1782. [Google Scholar] [CrossRef]
- Cao, L.; Coops, N.C.; Sun, Y.; Ruan, H.; Wang, G.; Dai, J.; She, G. Estimating canopy structure and biomass in bamboo forests using airborne LiDAR data. ISPRS J. Photogramm. Remote Sens. 2019, 148, 114–129. [Google Scholar] [CrossRef]
- Zhang, Q.; Xu, L.; Zhang, M.; Wang, Z.; Gu, Z.; Wu, Y.; Shi, Y.; Lu, Z. Uncertainty Analysis of Remote Sensing Pretreatment for Biomass Estimation on Landsat OLI and Landsat ETM+. ISPRS Int. J. Geo-Inf. 2020, 9, 48. [Google Scholar] [CrossRef]
- Kumar, P.; Krishna, A.P.; Rasmussen, T.M.; Pal, M.K. Rapid Evaluation and Validation Method of Above Ground Forest Biomass Estimation Using Optical Remote Sensing in Tundi Reserved Forest Area, India. ISPRS Int. J. Geo-Inf. 2021, 10, 29. [Google Scholar] [CrossRef]
- Stratoulias, D.; Nuthammachot, N.; Suepa, T.; Phoungthong, K. Assessing the Spectral Information of Sentinel-1 and Sentinel-2 Satellites for Above-Ground Biomass Retrieval of a Tropical Forest. ISPRS Int. J. Geo-Inf. 2022, 11, 199. [Google Scholar] [CrossRef]
- Dong, L.; Du, H.; Han, N.; Li, X.; Zhu, D.; Mao, F.; Zhang, M.; Zheng, J.; Liu, H.; Huang, Z.; et al. Application of Convolutional Neural Network on Lei Bamboo Above-Ground-Biomass (AGB) Estimation Using Worldview-2. Remote Sens. 2020, 12, 958. [Google Scholar] [CrossRef]
- Zhao, H.; Morgenroth, J.; Pearse, G.; Schindler, J. A Systematic Review of Individual Tree Crown Detection and Delineation with Convolutional Neural Networks (CNN). Curr. For. Rep. 2023, 9, 149–170. [Google Scholar] [CrossRef]
- Michałowska, M.; Rapiński, J. A Review of Tree Species Classification Based on Airborne LiDAR Data and Applied Classifiers. Remote Sens. 2021, 13, 353. [Google Scholar] [CrossRef]
- Weinmann, M.; Weinmann, M.; Mallet, C.; Brédif, M. A Classification-Segmentation Framework for the Detection of Individual Trees in Dense MMS Point Cloud Data Acquired in Urban Areas. Remote. Sens. 2017, 9, 277. [Google Scholar] [CrossRef]
- Lindberg, E.; Holmgren, J. Individual Tree Crown Methods for 3D Data from Remote Sensing. Curr. For. Rep. 2017, 3, 19–31. [Google Scholar] [CrossRef]
- Meschin, K. Canopy Gap Fraction Estimation from ICESat-2 ATL08 Product. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 2023. Available online: https://resolver.tudelft.nl/uuid:4c44f0fb-bd69-44d8-8ba9-6ae0b9584828 (accessed on 26 March 2024).
- Chen, Z.; Xu, B.; Devereux, B. Urban landscape pattern analysis based on 3D landscape models. Appl. Geogr. 2014, 55, 82–91. [Google Scholar] [CrossRef]
- Raich, J.W.; Nadelhoffer, K.J. Belowground Carbon Allocation in Forest Ecosystems: Global Trends. Ecology 1989, 70, 1346–1354. [Google Scholar] [CrossRef]
- Cui, X.; Guo, L.; Chen, J.; Chen, X.; Zhu, X. Estimating Tree-Root Biomass in Different Depths Using Ground-Penetrating Radar: Evidence from a Controlled Experiment. IEEE Trans. Geosci. Remote. Sens. 2013, 51, 3410–3423. [Google Scholar]
- Zhou, L.; Li, X.; Zhang, B.; Xuan, J.; Gong, Y.; Tan, C.; Huang, H.; Du, H. Estimating 3D Green Volume and Aboveground Biomass of Urban Forest Trees by UAV-Lidar. Remote Sens. 2022, 14, 5211. [Google Scholar] [CrossRef]
- Lin, Y.; Jaakkola, A.; Hyyppä, J.; Kaartinen, H. From TLS to VLS: Biomass Estimation at Individual Tree Level. Remote Sens. 2010, 2, 1864–1879. [Google Scholar] [CrossRef]
- Kato, A.; Moskal, L.M.; Schiess, P.; Swanson, M.E.; Calhoun, D.; Stuetzle, W. Capturing tree crown formation through implicit surface reconstruction using airborne lidar data. Remote Sens. Environ. 2016, 113, 1148–1162. [Google Scholar] [CrossRef]
- Reckziegel, R.B.; Larysch, E.; Sheppard, J.P.; Kahle, H.P.; Morhart, C. Modelling and Comparing Shading Effects of 3D Tree Structures with Virtual Leaves. Remote. Sens. 2021, 13, 532. [Google Scholar] [CrossRef]
- Yan, Z.; Liu, R.; Cheng, L.; Zhou, X.; Ruan, X.; Xiao, Y. A Concave Hull Methodology for Calculating the Crown Volume of Individual Trees Based on Vehicle-Borne LiDAR Data. Remote. Sens. 2019, 11, 623. [Google Scholar] [CrossRef]
- Hackenberg, J.; Spiecker, H.; Calders, K.; Disney, M.; Raumonen, P. SimpleTree—An Efficient Open-Source Tool to Build Tree Models from TLS Clouds. Forests 2015, 6, 4245–4294. [Google Scholar] [CrossRef]
- CityGML–Open Geospatial Consortium. (n.d.). Retrieved 19 April 2023. Available online: https://www.ogc.org/standard/citygml/ (accessed on 26 March 2024).
- Ortega-Córdova, L. Urban Vegetation Modeling 3D Levels of Detail. 2018 Degree Granting Institution. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 2018. Available online: https://repository.tudelft.nl/islandora/object/uuid:8b8967a8-0a0f-498f-9d37-71c6c3e532af?collection=education (accessed on 26 March 2024).
- Wei, Z.; Li, X.; He, Z. Semantic Urban Vegetation Modelling Based on an Extended CityGML Description. In Proceedings of the 2022 Digital Landscape Architecture Conference, Boston, MA, USA, 9 June 2022; pp. 200–212. [Google Scholar] [CrossRef]
- Zhu, C.; Zhang, X.; Hu, B.; Jaeger, M. Reconstruction of tree crown shape from scanned data. In Lecture Notes in Computer Science (Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); Springer: Berlin/Heidelberg, Germany, 2008; Volume 5093, pp. 745–756. [Google Scholar] [CrossRef]
- Zhen, Z.; Quackenbush, L.J.; Zhang, L.; Swatantran, A.; Baghdadi, N.; Thenkabail, P.S. Trends in Automatic Individual Tree Crown Detection and Delineation—Evolution of lidar Data. Remote Sens. 2016, 8, 333. [Google Scholar] [CrossRef]
- Dai, M.; Li, G. Soft Segmentation and Reconstruction of Tree Crown from Laser Scanning Data. Electronics 2023, 12, 2300. [Google Scholar] [CrossRef]
- Du, S.; Lindenbergh, R.; Ledoux, H.; Stoter, J.; Nan, L. AdTree: Accurate, Detailed, and Automatic Modelling of Laser-Scanned Trees. Remote Sens. 2019, 11, 2074. [Google Scholar] [CrossRef]
- Huang, Z.; Huang, X.; Fan, J.; Eichhorn, M.P.; An, F.; Chen, B.; Cao, L.; Zhu, Z.; Yun, T. Retrieval of Aerodynamic Parameters in Rubber Tree Forests Based on the Computer Simulation Technique and Terrestrial Laser Scanning Data. Remote Sens. 2020, 12, 1318. [Google Scholar] [CrossRef]
- Liang, X.; Kankare, V.; Hyyppa, J.; Wang, Y.; Kuuo, A.; Vastaranta, M. Terresial laser scanning in forest inventories. ISPRS J. Photogramm. Remote. Sens. 2016, 115, 63–77. [Google Scholar] [CrossRef]
- Angel, E. Interactive Computer Graphics a Top-Down Approach with OpenGL; Addison Wesley: Boston, MA, USA, 2003; pp. 559–593, ISBN-13 978-0-13-254523-5. [Google Scholar]
- Syed Ahmad, S.S.; Mohd Mushar, S.H.; Zamah Shari, N.H.; Kasmin, F. A Comparative study of log volume estimation by using statistical method. Educ. J. Sci. Math. Technol. 2020, 7, 22–28. [Google Scholar] [CrossRef]
- Tarsha Kurdi, F.; Lewandowicz, E.; Shan, J.; Gharineiat, Z. Three-dimensional modeling and visualization of single tree LiDAR point cloud using matrixial form. IEEE J. Sel. Top. Appl. Earth Obs. Remote. Sens. 2024, 17, 3010–3022. [Google Scholar] [CrossRef]
- Kurdi, F.T.; Gharineiat, Z.; Lewandowicz, E.; Shan, J. Modeling the Geometry of Tree Trunks Using LiDAR Data. Forests 2024, 15, 368. [Google Scholar] [CrossRef]
- Fernández-Sarría, A.; Martínez, L.; Velázquez-Martí, B.; Sajdak, M.; Estornell, J.; Recio, J.A. Different methodologies for calculating crown volumes of Platanus hispanica trees using terrestrial laser scanner and a comparison with classical dendrometric measurements. Comput. Electron. Agric. 2013, 90, 176–185. [Google Scholar] [CrossRef]
- Food and Agriculture Organisation. Available online: www.fao.org (accessed on 11 March 2024).
- Lewandowicz, E.; Antolak, M. Converting database on dendrological objects of Kortowo campus at the University of Warmia and Mazury in Olsztyn to current GIS standards. In Proceedings of the 15th International Multidisciplinary Scientific GeoConference SGEM 2015, Albana, Bulgaria, 18–24 June 2015; Volume 2, pp. 787–794. [Google Scholar]
- Salekin, S.; Catalán, C.H.; Boczniewicz, D.; Phiri, D.; Morgenroth, J.; Meason, D.F.; Mason, E.G. Global Tree Taper Modelling: A Review of Applications, Methods, Functions, and Their Parameters. Forests 2021, 12, 913. [Google Scholar] [CrossRef]
- Larsen, D.R. Simple taper: Taper equations for the field forester. In Proceedings of the 20th Central Hardwood Forest Conference, Newtown Square, PA, USA, 28 March–1 April 2016; Kabrick, J.M., Dey, D.C., Knapp, B.O., Larsen, D.R., Shifley, S.R., Stelzer, H.E., Eds.; Columbia, MO. General Technical Report NRS-P-167. U.S. Department of Agriculture, Forest Service, Northern Research Station: Newtown Square, PA, USA, 2016; pp. 265–278. [Google Scholar]
- Tarsha Kurdi, F.; Landes, T.; Grussenmeyer, P. Extended RANSAC algorithm for automatic detection of building roof planes from Lidar data. Photogramm. J. Finl. 2008, 21, 97–109. [Google Scholar]
- Lewandowicz, E.; Tarsha Kurdi, F.; Gharineiat, Z. 3D LoD2 and LoD3 modeling of buildings with ornamental towers and turrets based on LiDAR data. Remote Sens. 2022, 14, 4687. [Google Scholar] [CrossRef]
- Tarsha Kurdi, F.; Landes, T.; Grussenmeyer, P.; Smigiel, E. New approach for automatic detection of buildings in airborne laser scanner data using first echo only. Eng. Environ. Sci. 2006, 36, 25–30. [Google Scholar]
- Tarsha Kurdi, F.; Reed, P.; Gharineiat, Z.; Awrangjeb, M. Efficiency of terrestrial laser scanning in survey works: Assessment, modelling, and monitoring. Int. J. Environ. Sci. Nat. Resour. 2023, 32, 556334. [Google Scholar] [CrossRef]
- Tarsha Kurdi, F.; Awrangjeb, M. Comparison of LiDAR building point cloud with reference model for deep comprehension of cloud structure. Can. J. Remote Sens. 2020, 46, 603–621. [Google Scholar] [CrossRef]
- Ostrowski, W.; Pilarska, M.; Charyton, J.; Bakuła, K. Analysis of 3D building models accuracy based on the airborne Laser scanning point clouds. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, 42, 797–804. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tree Width Error | Tree Height Error | |||||||
|---|---|---|---|---|---|---|---|---|
| Tree No. | Min (m) | Max (m) | Mean (m) | Min (m) | Max (m) | Mean (m) | ||
| 1 | 0.01 | 0.29 | 0.15 | 0.28 | 0.01 | 0.02 | 0.01 | 0.01 |
| 2 | 0.01 | 0.49 | 0.22 | 0.27 | 0.01 | 0.27 | 0.02 | 0.00 |
| 3 | 0.01 | 0.23 | 0.11 | 0.27 | 0.01 | 0.04 | 0.01 | 0.01 |
| 4 | 0.01 | 0.42 | 0.15 | 0.23 | 0.01 | 0.01 | 0.01 | 0.00 |
| 5 | 0.01 | 0.14 | 0.07 | 0.29 | 0.01 | 0.08 | 0.01 | 0.00 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tarsha Kurdi, F.; Lewandowicz, E.; Gharineiat, Z.; Shan, J. Accurate Calculation of Upper Biomass Volume of Single Trees Using Matrixial Representation of LiDAR Data. Remote Sens. 2024, 16, 2220. https://doi.org/10.3390/rs16122220
Tarsha Kurdi F, Lewandowicz E, Gharineiat Z, Shan J. Accurate Calculation of Upper Biomass Volume of Single Trees Using Matrixial Representation of LiDAR Data. Remote Sensing. 2024; 16(12):2220. https://doi.org/10.3390/rs16122220
Chicago/Turabian StyleTarsha Kurdi, Fayez, Elżbieta Lewandowicz, Zahra Gharineiat, and Jie Shan. 2024. "Accurate Calculation of Upper Biomass Volume of Single Trees Using Matrixial Representation of LiDAR Data" Remote Sensing 16, no. 12: 2220. https://doi.org/10.3390/rs16122220
APA StyleTarsha Kurdi, F., Lewandowicz, E., Gharineiat, Z., & Shan, J. (2024). Accurate Calculation of Upper Biomass Volume of Single Trees Using Matrixial Representation of LiDAR Data. Remote Sensing, 16(12), 2220. https://doi.org/10.3390/rs16122220