3.1. Feasibility Analysis
The feasibility of the RD domain DOA estimation comes from the invariance of the direction information of the incident waves in the two-dimensional ambiguity function. In the following, the conclusion will be derived from analyzing the two-dimensional ambiguity function calculated by the reference signal and the signal of each receiving channel which is called the surveillance channel signal.
The SNR of the reference signal as Equation (6) is high enough. In addition, it is assumed that the direct wave signal in the array received signal
as Equation (1) has been completely suppressed by time domain cancellation or beamforming, so the vector of
channel surveillance channel signals can be indicated as:
where the vector
can be expressed in
.
The
m-th channel two-dimensional ambiguity function
of the reference signal and the
m-th surveillance channel signal
can be obtained as:
where
and
are the search value of Range and Doppler shift, respectively, and
represents the
m-th element of the
i-th multipath signal’s steering vector
. Therefore, the two-dimensional ambiguity function vector
of
channels is written in the following form:
where
is an amplitude factor diagonal matrix of
multipath signals,
is the array manifold matrix composed of the steering vectors of
multipath signals,
is the two-dimensional ambiguity function vector of the normalized amplitude direct wave signal and the normalized amplitude
multipath signals, and the
i-th element of
is:
is the equivalent noise vector of
channels, the
m-th element of
is:
In addition, the two-dimensional spectrum based on the two-dimensional ambiguity function can be called the RD map generally. The ambiguity function vector in the form of Equation (9) is called the RD domain virtual array signal in this paper, which completely retains the steering vector of multipath signals, indicating that the virtual array signal has the same spatial characteristics as the surveillance channel signal in Equation (7), which is the principle basis for DOA estimation in the RD domain.
The RD domain virtual array signal consists of the first term representing a multipath signal and the second term representing noise, and can be rewritten as:
3.2. Range Spectrum Virtual Array of Narrowband Signal
The RD domain covariance matrix is constructed by using the RD domain virtual array snapshot data obtained by Equation (12) as follows:
Since single RD calculation can only produce single snapshot data, the rank of
is 1, which makes it unrealistic to directly use
for the MUSIC method. In order to obtain multi-snapshots data to restore the rank of
, the time-domain sampling sequence of the reference signal and the
m-th surveillance channel signal are generally divided into
segments (
), respectively, and the ambiguity function
of the k-segment
is calculated. The two-dimensional ambiguity function value at
, which are the serial number of the time delay and Doppler shift, known as the RD unit where the
i-th multipath signal is located, is used to construct the
m-th channel virtual sampling sequence
,
, so the M-channels,
K-snapshots virtual array data are
. The reference diagram of this method is shown in
Figure 2. We use the first virtual array construction (VAC1) to refer to the method of generating multi-snapshots virtual array data by segmenting the time-domain sampling sequence.
Aiming at the direction-finding application scenario of the low SNR narrowband signals, another method is proposed to construct RD domain multi-snapshots. The range spectrum at the target scattering wave signal’s Doppler shift on the RD map is directly regarded as the multi-snapshots in the RD domain without segmenting the time-domain sampling sequence of the reference signal and the surveillance channel signals. That is to say, a column of range spectrum with length
at the
i-th multipath signal’s Doppler shift
on the RD map generated by the reference signal and the
m-th surveillance channel signal is directly regarded as the virtual sampling sequence
of the
m-th channel, and the range spectrum sampling interval is defined as
. Therefore, the range spectrum virtual array data of M-channels and
-snapshots are defined as follows:
We use the second virtual array construction (VAC2) to refer to the method of directly generating multi-snapshots virtual array data by the range spectrum on RD map. The reference diagram of VAC2 is shown in
Figure 3.
The virtual array data covariance matrix is approximated as:
The
virtual array data need to satisfy
to ensure that
is a full rank matrix. The eigen-decomposition of
and the MUSIC spectrum function are similar to
Section 2 which can be expressed as:
The CRB of virtual array data DOA estimation method can be calculated as:
where
is the number of virtual array snapshots and
is the diagonal matrix composed of the equivalent SNR of the virtual array signal.
Compared with VAC1, VAC2 only requires calculation of the two-dimensional ambiguity function once for each surveillance channel, which can significantly decrease the computation burden. Furthermore, more points can participate in coherent integration because it is not necessary to segment the time-domain sampling sequence, which can theoretically provide greater SNR gain. When the SNR of the target scattering wave is set to −40 dB, the RMSE comparison results of the azimuth estimation of the incident signal under the two construction methods of VAC1 and VAC2 are shown in
Figure 4. The abscissa indicates the number of snapshots in the RD domain. The primary conclusion, which can be obtained from the results with the 200 Hz bandwidth signal, is that the azimuth estimation error of the VAC2 method is smaller, and the VAC2 method can obtain higher and more robust SNR gain than the VAC1 method when processing narrowband signals. However, the DOA estimation performance of the VAC1 method is less affected by the bandwidth of the incident signal and the number of snapshots in the RD domain, and it is also shown in
Figure 4 that there is a negative correlation between the bandwidth of the incident signal and the DOA estimation performance of the VAC2 method. When the bandwidth reaches 6 kHz, the DOA estimation performance of the VAC2 method is worse than that of the VAC1 method, and the estimation accuracy gradually deteriorates with the increase of the number of the RD domain snapshots.
According to the results in
Figure 4 and the principle that the main lobe width of the range spectrum on the RD map is inversely proportional to the signal bandwidth, when the RD domain sampling points of the VAC2 method are selected to exceed the main lobe range in the range spectrum, the RD domain signal processing cannot obtain sufficient SNR gain. Since the number of snapshots in the RD domain must meet the requirement of
, the ideal application condition of VAC2 is that the bandwidth of the incident signal is not greater than
, and
is an empirical value in the range of [1, 10].
3.3. Signal-to-Noise Ratio Gain Analysis
Assuming that the incident signal is a narrowband signal, the reference signal is shown in Equation (6) with the SNR conformed to ; the surveillance channel array signals are shown in Equation (7); where the multipath signals number is , the complex amplitude of the i-th multipath signal is , and the power of the noise in each surveillance channel is . Since the power level of each multipath signal is lower than the noise to meet the weak scattering waves characteristic, the SNR is conformed to .
It can be seen from Equation (12) that the two-dimensional ambiguity function vector consists of the signal part and the noise part, so as to calculate the SNR of the RD domain multi-snapshots virtual array data. Each receiving array element has channel consistency and the noise of each channel is independent and identically distributed. It can be considered that the SNR of the time-domain sampling sequence between each channel is consistent. Similarly, the SNRs of the RD domain sampling sequence between the channels are also the same. Therefore, only the m-th channel’s RD domain SNR is derived below instead of calculating all channels.
The
m-th channel two-dimensional ambiguity function
shown in Equation (12) can be represented by the signal part
and the noise part
,
,
, respectively:
where
is the correlation term between the reference channel signal and the
i-th multipath signal, and
is the correlation term between the reference channel noise and the
i-th multipath signal.
Suppose that the desired DOA estimation signal is the
L-th multipath signal, and the
represents the two-dimensional ambiguity function value of the desired signal. In the RD unit
where the desired signal is located, the power of the
L-th multipath signal in the
m-th channel can be calculated as follows:
In the RD unit
, the
of other
multipath signals become the interference term of signal part
. When
is large and the range parameter meets
, the correlation coefficient between
and
is expressed as
, tending to zero, so the power of the interference term is approximately:
The three terms of the noise part in the two-dimensional ambiguity function are analyzed in the following. Taking
as an example, the Fourier series coefficients of the range spectrum sequence with
points are obtained:
where
is the Fourier series coefficient of the incident signal
, also known as the spectral coefficient;
is the
k-th frequency point on the spectrum. Since
is independent of the sampling serial number
, Equation (25) can be simplified as:
where
is the spectral coefficient of the
m-th surveillance channel noise
.
Because the noise is a white Gaussian process which has a power of
, it can be considered that
has a constant value of
among the whole spectrum, that is,
. Substituting it into Equation (26), we can obtain the following:
According to the Parseval theorem of discrete Fourier series, the average power of the signal in the time domain is equal to the sum of the power in the frequency domain, which can be expressed as
. Therefore, the expression of the quadratic sum of
at the range spectrum can be obtained as:
It is known that the average power of
and
is 1 and
, respectively. By using the Parseval theorem for
and
, Equation (28) can be rewritten as:
It can be seen from Equation (27) that the distribution of
is independent of the Doppler shift, so the root mean square
of
in the two-dimensional ambiguity function is equal to the root mean square of the range spectrum:
Similarly, the root mean square
and
of
and
can be calculated, respectively, as follows:
The average value of the noise power contained in each RD unit on the RD map of the
m-th channel is:
Considering a mathematical theorem of the inequality relation in which the absolute value of the arithmetic mean of several numbers does not exceed the root mean square of these numbers [
27], the upper bound of noise power can be derived from Equation (33) as follows:
The ratio of the signal power
in the RD unit where the desired signal is located to the average noise power
in each RD unit on the RD map is called the RD domain SNR, which can be given by the following:
where
is the SNR of the
L-th multipath signal which is the desired signal,
is the SNR of the
i-th signal of the all
multipath signals, and
is the SNR of the reference signal. Equation (35) shows that the lower bound of SNR in the RD domain is proportional to
, which is the number of coherent integration points, and inversely proportional to
, which is the number of multipath signals. In addition, the lower bound of
is proportional to the reference signal’s SNR (
) and inversely proportional to the SNR of each multipath signal (
) except the desired signal.
Supposing that the noise terms
,
and
are uncorrelated additive noises, then Equation (33) can be directly reduced to:
In this case, the RD domain SNR is obtained as follows:
According to the foregoing, the signals’ SNRs are obtained by and , and Equation (37) can be approximated as . In summary, the target scattering wave can obtain a maximum N-fold SNR gain in the RD domain compared to the time-domain sampling sequence of the surveillance channel.
3.4. Direction of Arrival Estimation of Coherent Weak Signals in Range-Doppler Domain
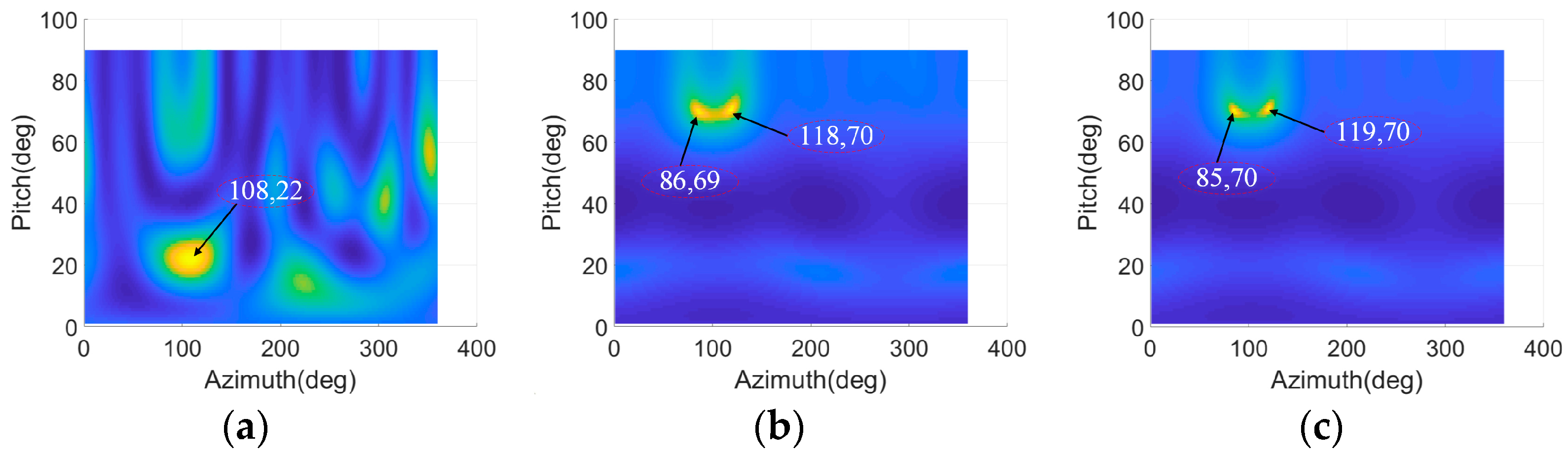
When multiple targets flying in formation at the same altitude and the same speed are close to the receiving position, the Doppler shift, time delay, and pitch angle of the scattering wave of different targets may be similar. According to the difference in azimuth, different members of the formation can be distinguished by scattering wave DOA estimation. When the RD domain virtual array data are constructed in the VAC2 method, due to the similar Doppler shift and time delay, the scattering waves of different targets are distributed on the range spectrum at the same Doppler shift on the RD map, and obtain approximately the same coherent integration gain and synchronization in virtual sampling sequence, so they can be considered as coherent received signals. The coherence between signals may cause rank loss of the covariance matrix and affect the accuracy of the spatial spectrum estimation algorithm. Therefore, the decoherence method is acquired to eliminate the influence of scattering wave signals’ coherence in the DOA estimation method.
3.4.1. Decoherence Method for Uniform Circular Array in Range-Doppler Domain
Since the UCA array manifold matrix does not have a Vandermonde structure similar to the ULA array manifold matrix, the mode excitation method is usually used to convert the UCA into a virtual uniform linear array structure for decoherence processing [
28]. The research of UCA mode excitation in RD domain for DOA estimation of coherent signals is completed in the following.
The M-channels and
-snapshots virtual array data constructed by the VAC2 method are regarded as a pseudo-time series, with length
, of each channel’s sampling data received by the M-elements UCA. The
m-th channel and
-snapshots pseudo-time series in the virtual time of
is given as follows:
where
is the sampling interval of range spectrum on the RD map.
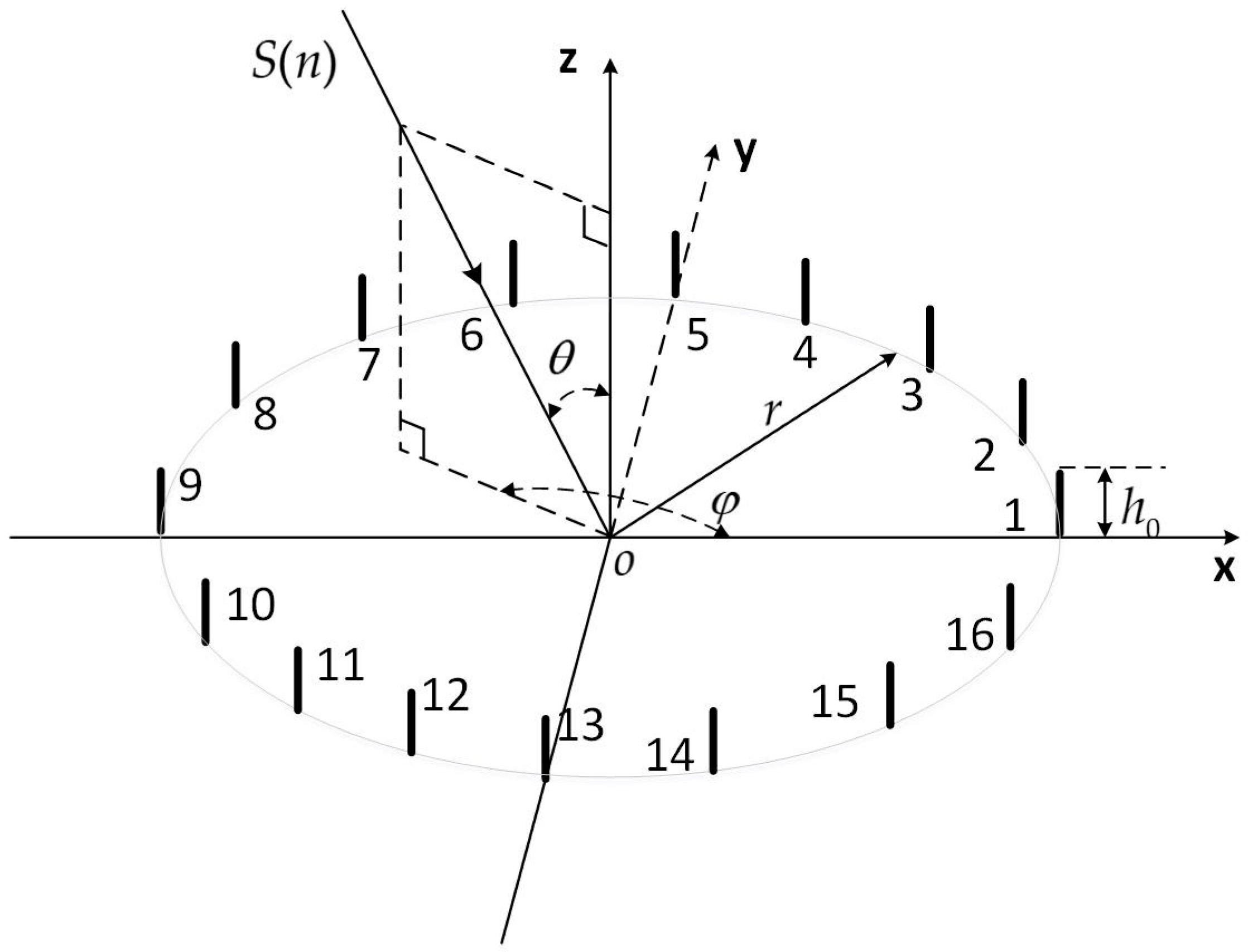
The array manifold matrix of UCA can be composed of the steering vectors of
multipath signals, which is expressed as
. When the UCA center point and the
antennas are at the same height of
, the
i-th multipath signal’s steering vector can be expanded as:
The noise component in the pseudo-time series is represented as
. Let
, and the pseudo-time series received by the M-element UCA can be expressed as:
The form of Equation (40) is consistent with Equation (1), so the mode excitation of UCA in RD domain can refer to the time domain mode excitation of UCA. The virtual ULA elements obtained by the UCA manifold transform are symmetrically distributed with the serial number
antenna as the center. When the number of UCA elements satisfies
, the mode excitation method can be used to convert the UCA sampling sequence points of the M-channels into the virtual ULA sampling sequence points of the
channels, which are defined as follows:
In the formula:
where
,
is the first kind Bessel function of order
,
is the carrier frequency of the signal, and
is the velocity of light. The number of the virtual ULA elements should meet the maximum number of modes required for mode excitation as
, where
is the downward integer symbol. In the case that all sources are coplanar, the pitch angle of the incident signal is basically the same, so
in Equation (46) as the array manifold vector of the virtual ULA is abbreviated as
.
In the pseudo-time series received by the UCA in the RD domain, the expected target scattering wave signal and its coherent signal occupies the largest proportion in the range spectrum due to the coherent integration processing. The eigen-decomposition of the pseudo-time series sampling covariance matrix
is calculated according to Equation (15), and the eigenvector
corresponding to the maximum eigenvalue is a linear combination of the steering vectors of the scattering wave signal and its coherent multipath signals [
19]. This characteristic is also valid on the virtual ULA obtained by the mode excitation of UCA, because the mode excitation does not change the composition of the received signal.
of virtual ULA can be expressed as:
where
is the steering vector matrix of
coherent multipath signals and
is the coefficient vector. Substituting Equation (46) into Equation (47), another expression form of
is given as follows:
The eigenvector singular value decomposition (ESVD) is a decoherence method for signal processing of ULA, which constructs an
dimensional matrix with the elements of
as follows:
The
dimension satisfies
,
,
, and tends to the square matrix as much as possible. From Equation (46) and Equation (49),
can be transformed into the following:
where
, and
denotes the first m rows of the steering vector matrix
, so Equation (51) can be further simplified as follows:
Equation (52) shows that the rank of is the same as the number of multipath signals, and is no longer affected by the coherence of multipath signals. This conclusion indicates that the ESVD method has the ability to resolve coherence. The singular value decomposition of is , and the left singular value matrix is divided into signal subspace and noise subspace according to the distribution of singular value. Finally, the MUSIC spectrum estimation method is used to realize the DOA estimation of coherent signals. In this paper, this direction estimation method for coherent signals is called RD-ESVD-MUSIC.
3.4.2. The Proposed Improved Method
The RD-ESVD-MUSIC method does not make full use of the symmetric manifold characteristics of the virtual ULA array. Therefore, an improved ESVD-MUSIC method based on the symmetric relationship of the virtual ULA array is proposed, which is called mutual-ESVD-MUSIC in the RD domain, referred to as RD-MESVD-MUSIC. The specific steps of this method are as follows.
Firstly, the single-point correlation values of all channel elements and the central antenna channel element in the maximum eigenvector
are calculated as follows:
Equation (47) is substituted into the above formula:
where
,
.
Then, according to the symmetry of the virtual ULA, a Toeplitz matrix is constructed in the following form:
A new array manifold vector
is constructed, and
is the steering vector matrix of the corresponding
coherent signals, so
can be transformed into a covariance matrix form:
satisfies the Vandermonde structure, and each column is linearly independent when the DOA of
coherent signals is inconsistent. Therefore, the rank of
is restored to the number of multipath signals to achieve decoherence.
Since
is not necessarily a Hermitian matrix in the actual construction, it can be corrected by referring to the idea of spatial smoothing.
is a switching matrix whose sub-diagonals are all one and other elements are zero. The reverse correction matrix
is generated as follows:
From Equation (57), it can be seen that the reverse correction matrix does not change the steering vector information of the multipath signals. can be used to smooth the by . The corrected matrix is a Hermitian matrix, and its eigenvalues are real. Finally, the eigen-decomposition is given to obtain the signal space and the noise space, and the DOA estimation of coherent signals is realized by the MUSIC method.
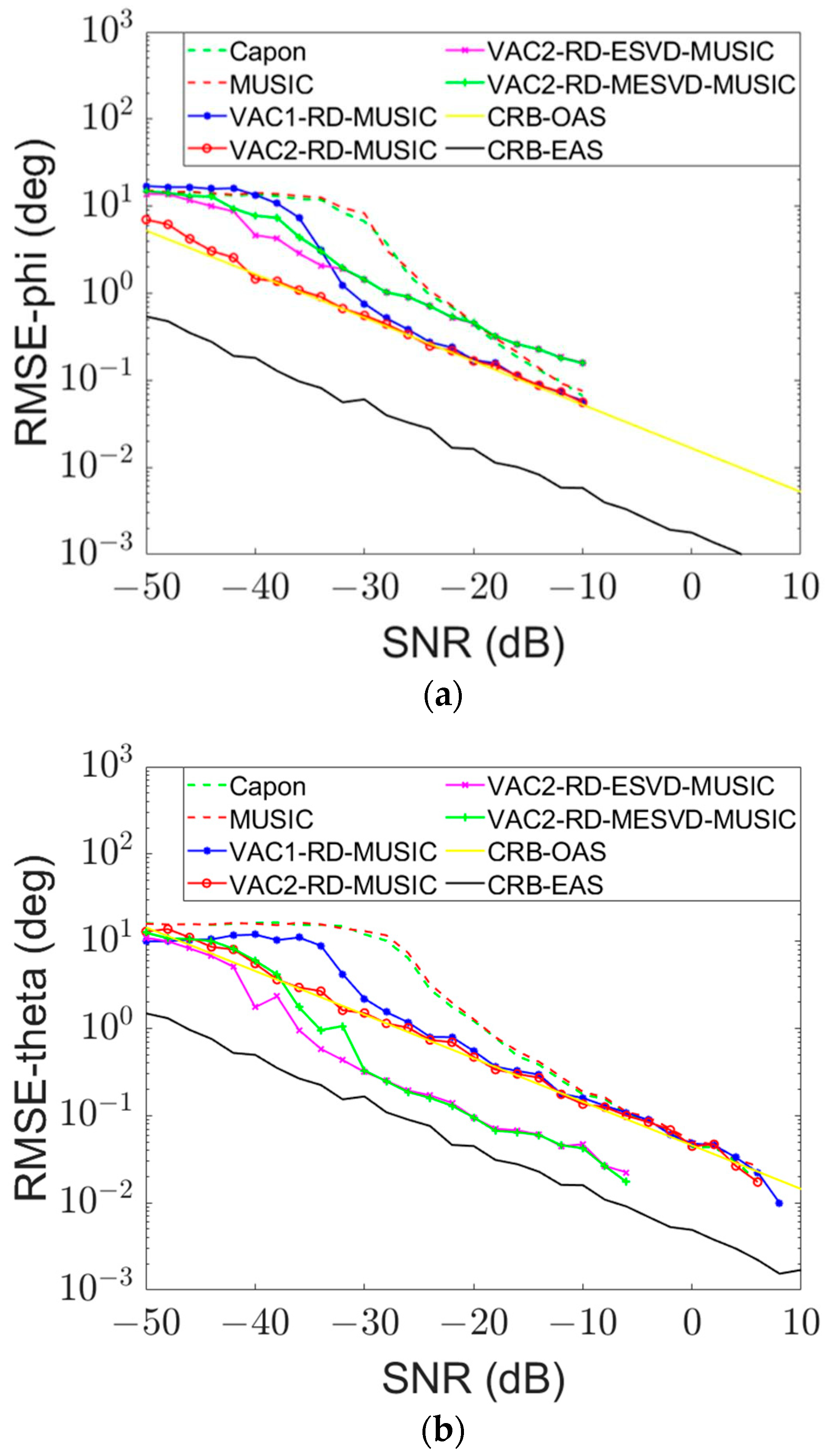
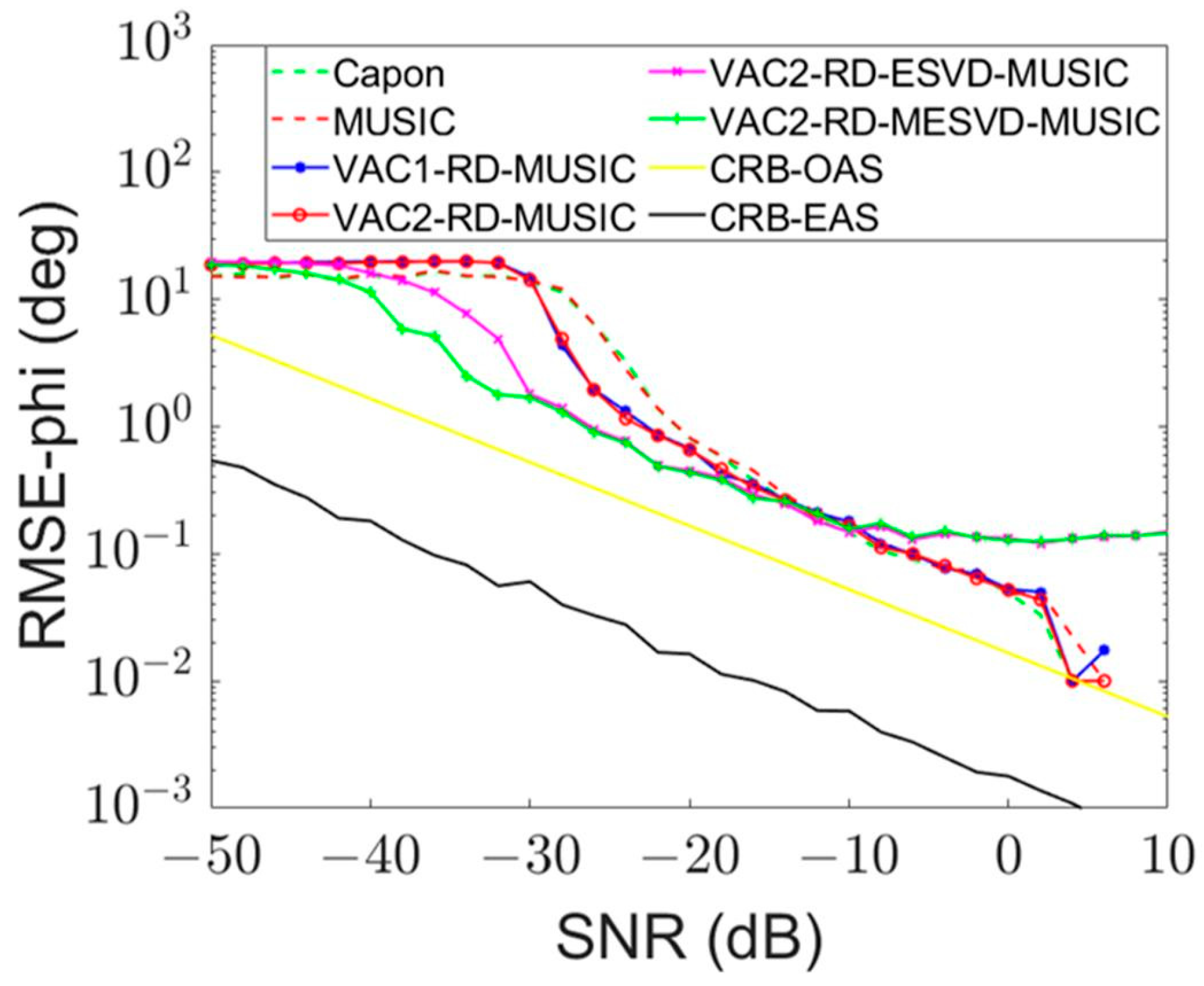
Compared with the RD-ESVD-MUSIC method, each column of the covariance matrix constructed with the proposed method contains more information about the array elements, so it may have better resolution when estimating the azimuth of weak coherent signals. The subsequent simulation results will show that RD-MESVD-MUSIC can achieve higher estimation accuracy and robustness than RD-ESVD-MUSIC for weak coherent multipath signals.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}