
Anti-Jamming Imaging Method for Carrier-Free Ultra-Wideband Airborne SAR Based on Variational Modal Decomposition


Abstract
1. Introduction
2. Carrier-Free Ultra-Wideband Signal
3. Backward Projection Imaging
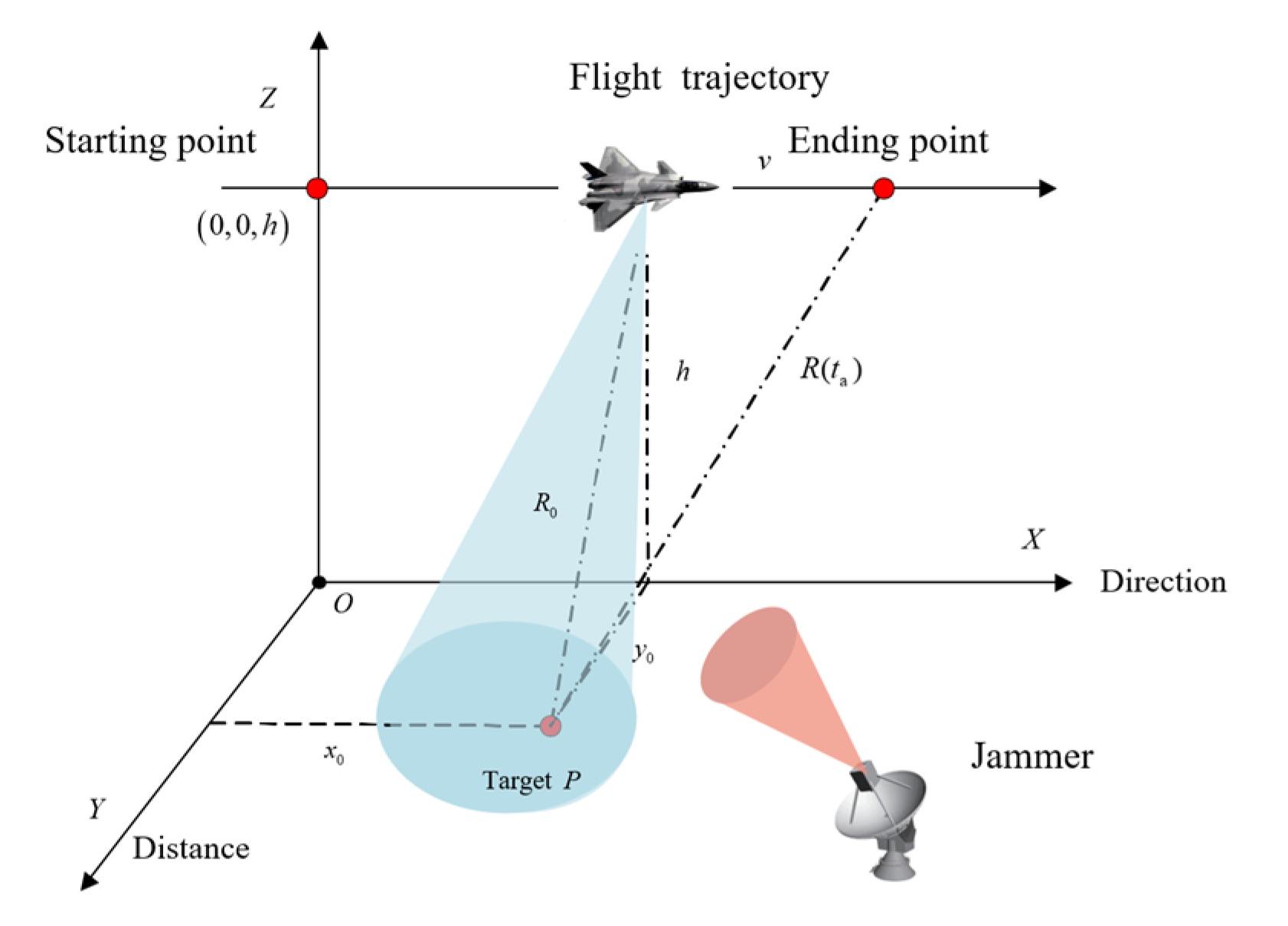
3.1. Airborne SAR Imaging Model
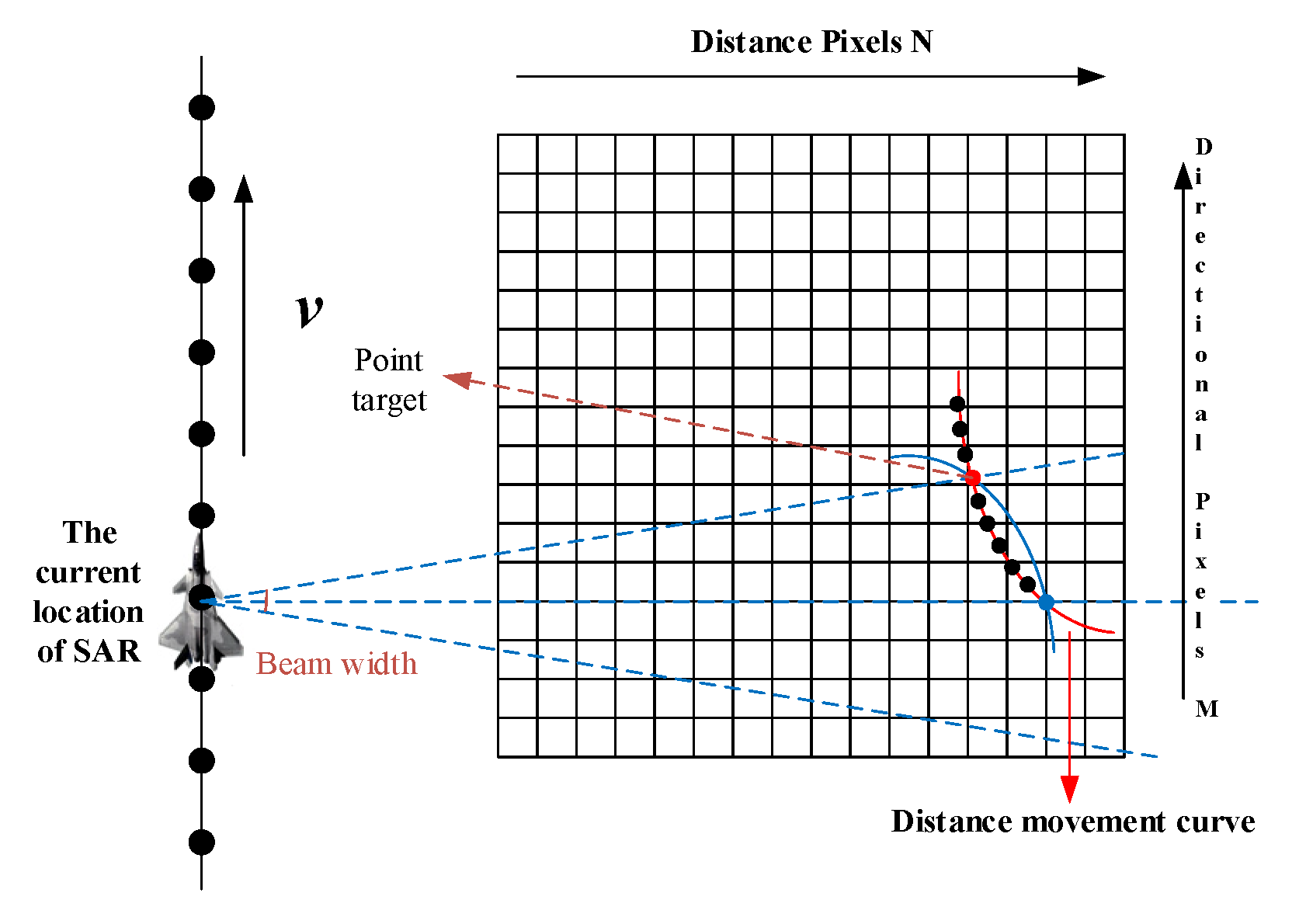
3.2. Principle of Backward Projection Algorithm
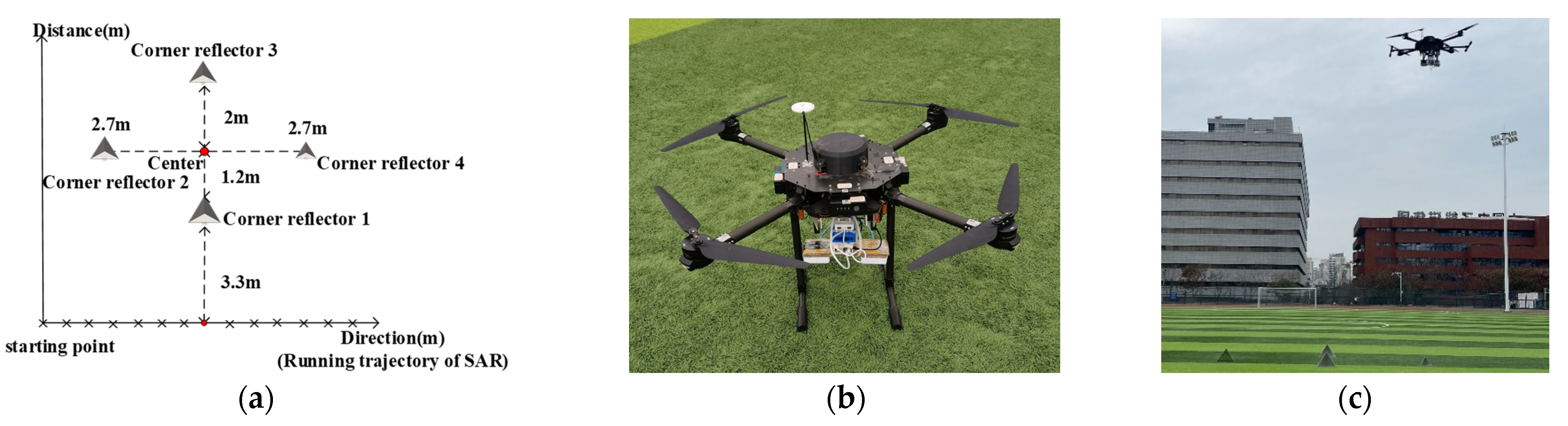
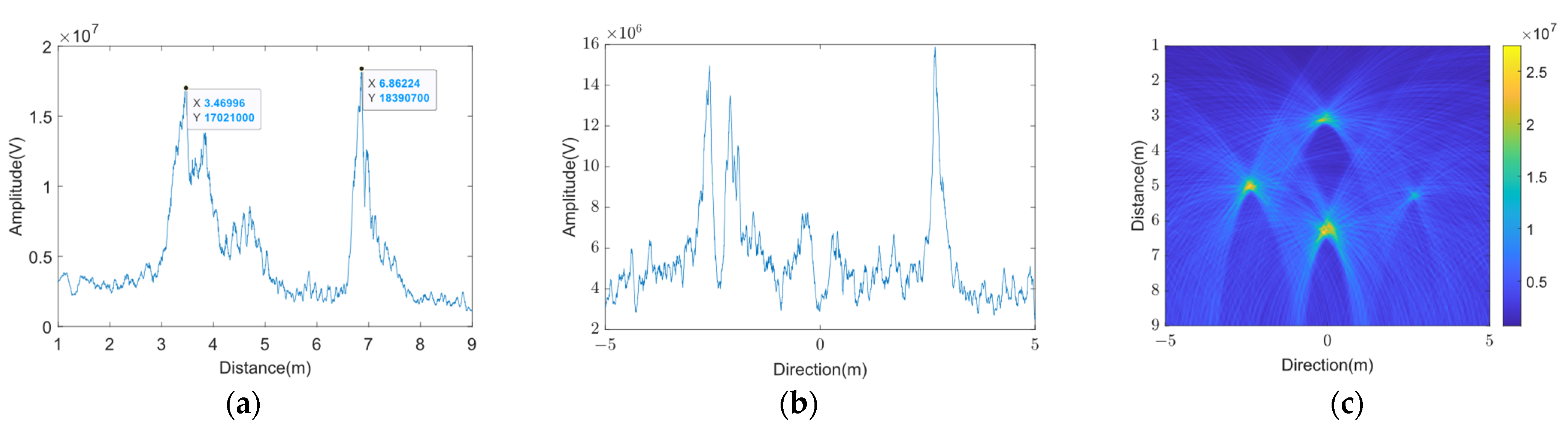
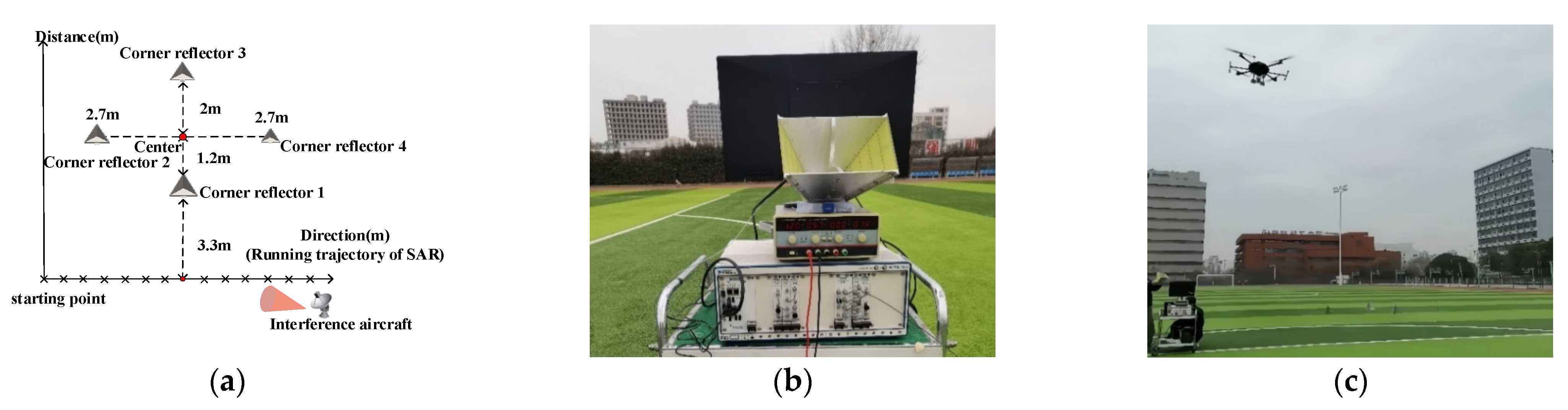
3.3. Carrier-Free Ultra-Wideband Airborne SAR Outfield Test Realization for Backward Projection Imaging
4. Analysis of the Effects of Blanket Jamming on Airborne SAR
4.1. Noise Amplitude Modulation Jamming
- The noise signal introduced by NAM jamming results in the intensity distortion of the target echo signal in the original SAR image. This intensity distortion may manifest as the amplitude modulation or attenuation of the target echo signal, causing the target’s brightness or reflectance characteristics to show abnormal variations in the image;
- The presence of NAM jamming reduces the contrast between the target and the background of the original SAR image, blurs the boundary between the target and the background, and makes the distinction between the target echo and the background noise decrease, thus reducing the clarity and discrimination of the image;
- NAM jamming causes phase distortion or amplitude changes in the target echo signal, leading to blurred target details in the original SAR image, resulting in unclear contours and fuzzy edges of the target and making it difficult to resolve the target morphology and structure.
4.2. Noise Frequency Modulation Jamming
- NFM jamming causes a frequency shift in the frequency of the original SAR signal, and the shift leads to a change in the spectral position of the echo signal, which prevents accurate integration of the target echo in the image and leads to blurred images;
- NFM jamming causes the phase distortion of the original SAR signal, and the phase distortion causes the phase of the echo signal to change, which affects the coherent superposition and synthesis of the echo from the same target, which in turn causes image blurring;
- When the jamming source modulates the power of the SAR signal, the NFM jamming will cause the intensity of the original SAR signal to change. This change in signal strength will lead to an uneven distribution of the energy of the target echo in the image, which in turn will affect the clarity and contrast of the picture.
4.3. Sinusoidal Frequency Modulation Jamming
- When SFM jamming mixes with the signal during transmission, their frequency ranges may overlap, causing the jamming signal to overlap with the original signal in the frequency domain. This makes it difficult for the receiving end to accurately identify the original signal;
- During frequency modulation, changes in the signal’s frequency also result in changes in its amplitude, according to the properties of the Fourier transform. This can lead to distortion in the received signal.
5. Variational Mode Decomposition Algorithm for Anti-Jamming
5.1. Principles of the Variational Modal Decomposition Algorithm
- (1)
- Initialize the values of , , , and . The decomposition modulus number is usually taken at 3~7;
- (2)
- Make and so that and are iteratively updated according to Equations (16) and (17);
- (3)
- When , the updated law of is expressed aswhere denotes the noise tolerance parameter, which is used in the VMD algorithm to control the degree to which the decomposition results are affected by noise.
- (4)
- Repeat steps 2 and 3 to make , , and adaptively updated, and stop the iteration when the parameters satisfy the convergence condition.
5.2. The Parameter Selection and Complexity Analysis of the VMD Algorithm
5.2.1. The Parameter Selection of the VMD Algorithm
- (1)
- Mode Number
- (2)
- Penalty coefficient
- (3)
- The convergence condition
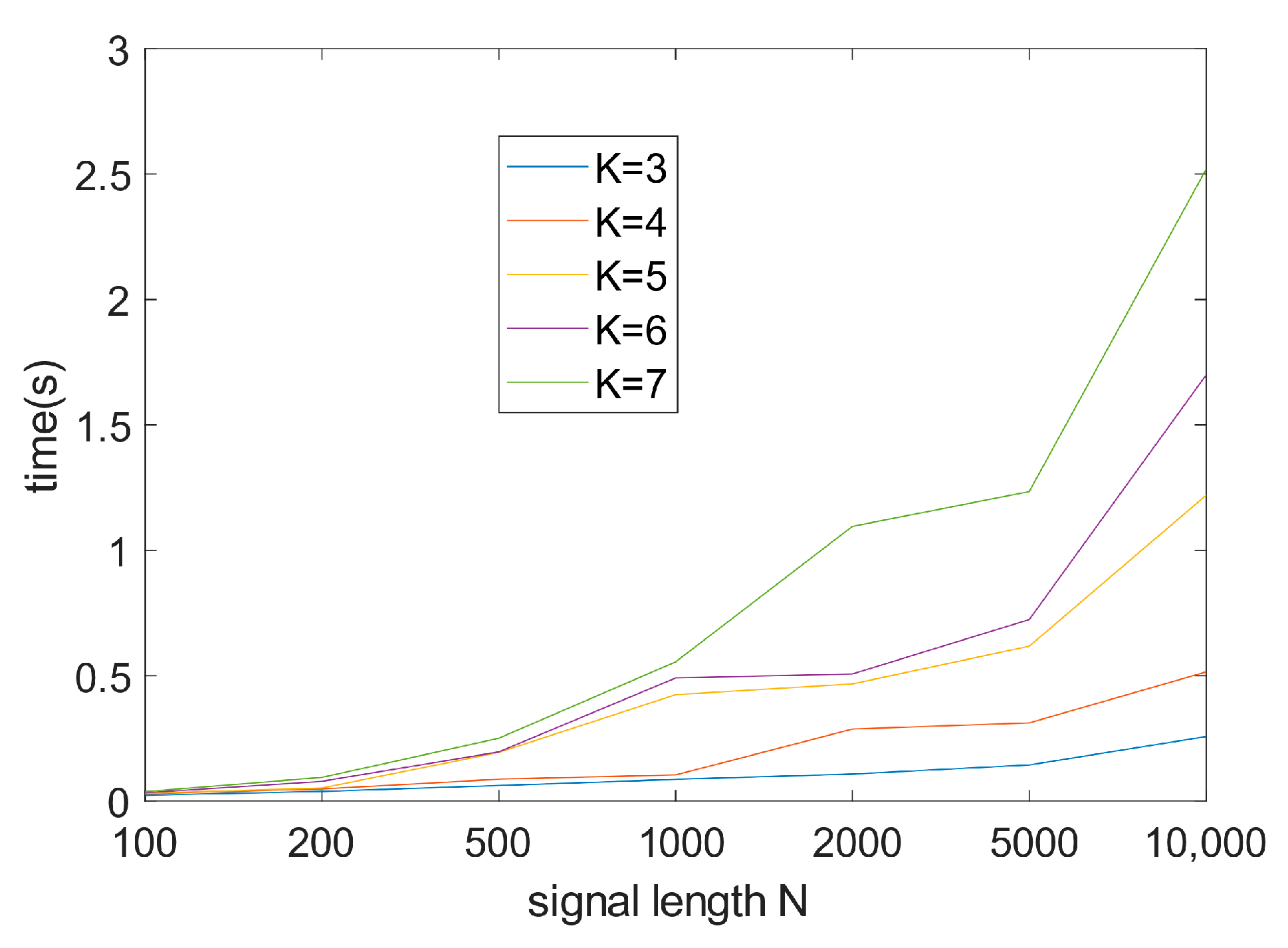
5.2.2. The Complexity Analysis of the VMD Algorithm
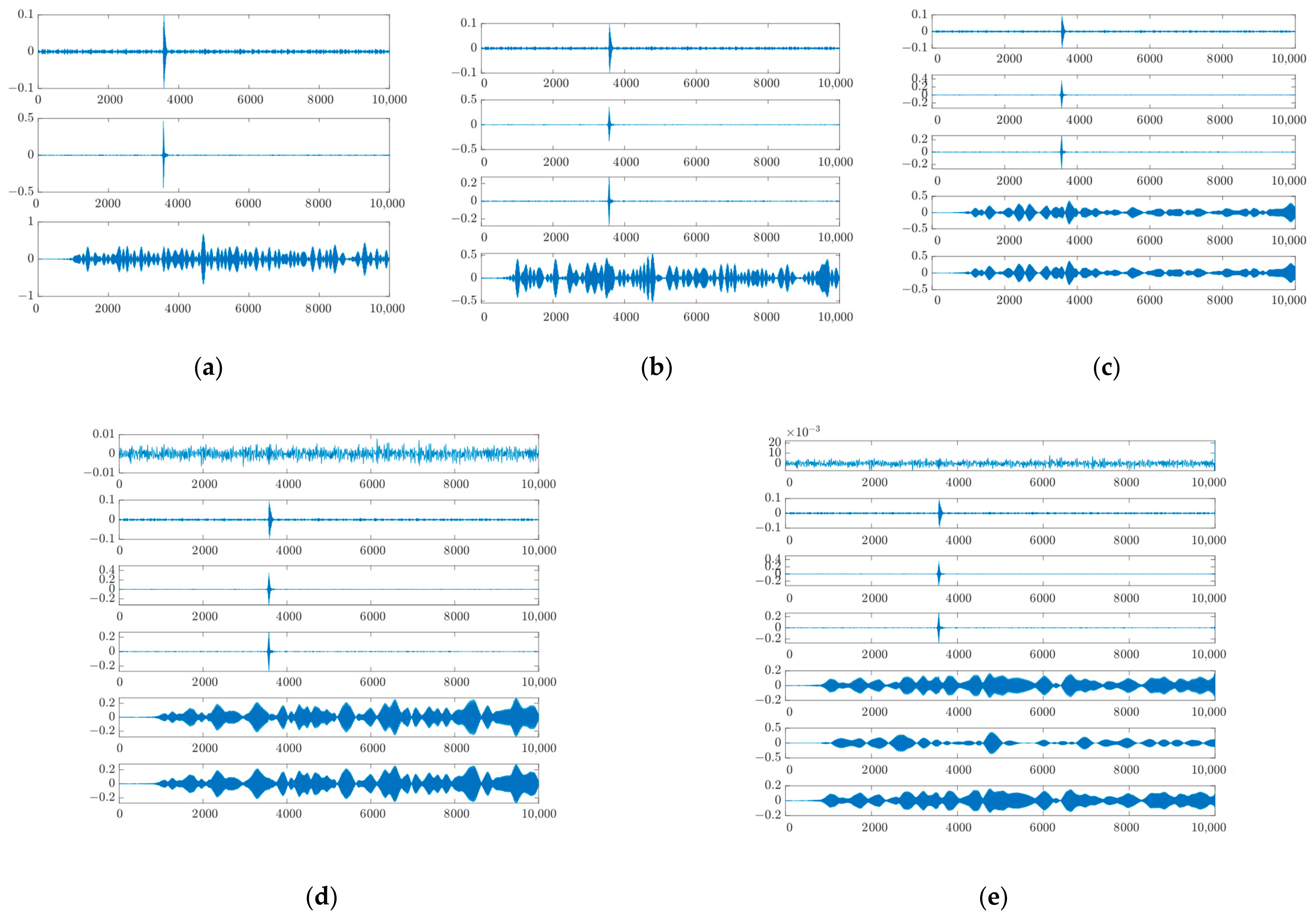
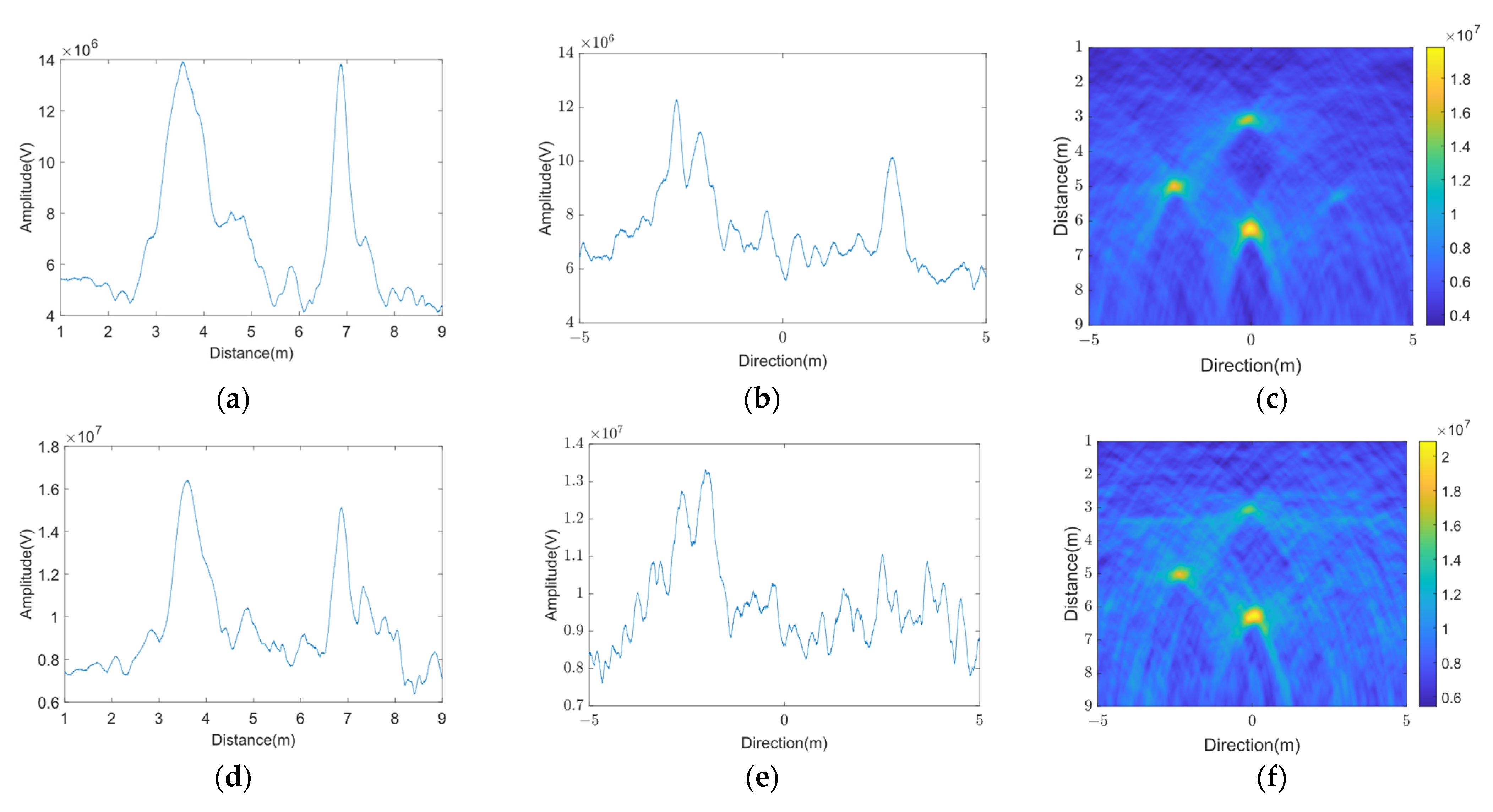
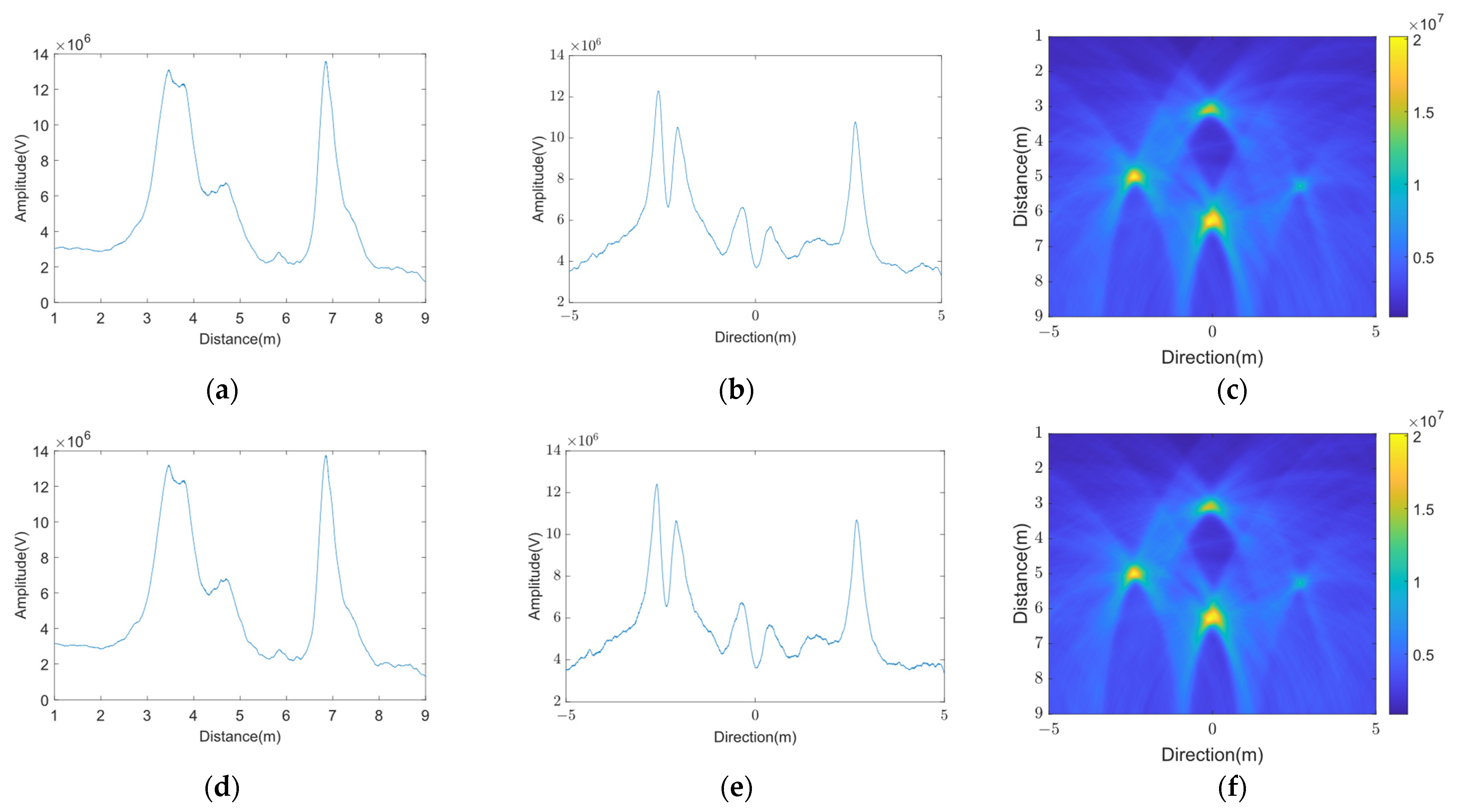
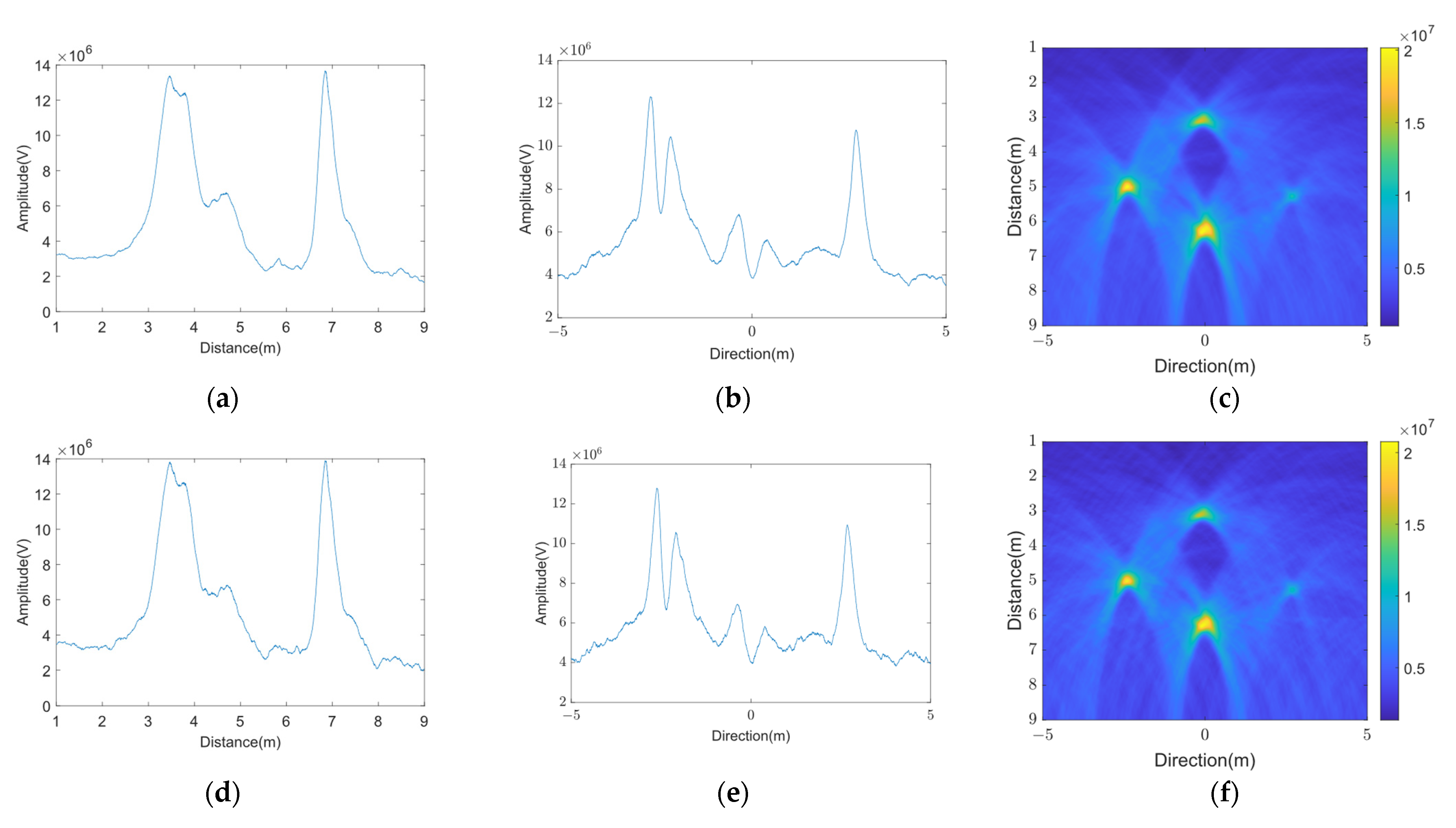
5.3. Experimental Verification of VMD Algorithm against Jamming
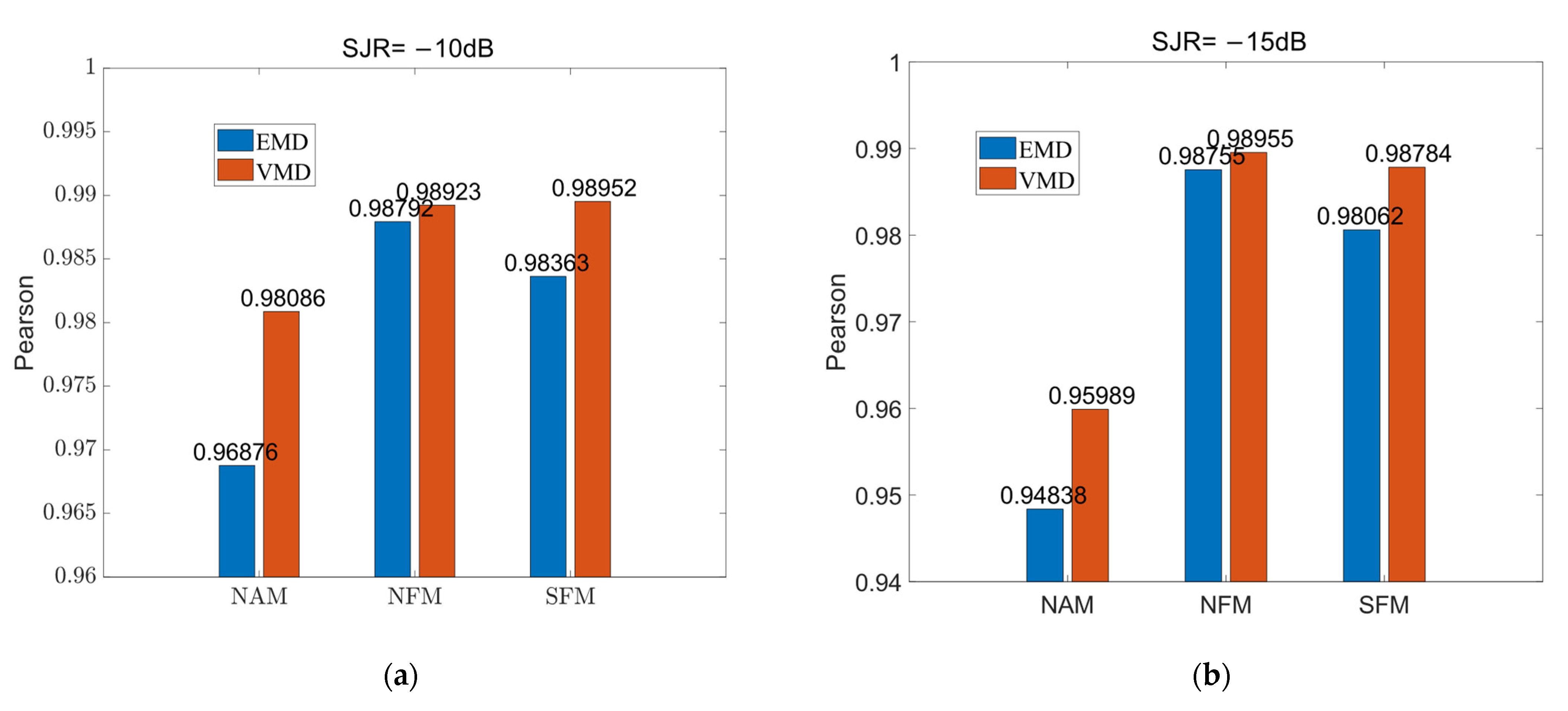
6. Algorithm Performance Comparison
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Liu, A.; Wang, F.; Xu, H. N-SAR: A New Multi-Channel Multi-Mode Polarimetric Airborne SAR. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; pp. 5394–5397. [Google Scholar]
- Li, C.; Yang, Y.; Yang, X.; Chu, D.; Cao, W. A Novel Multi-Scale Feature Map Fusion for Oil Spill Detection of SAR Remote Sensing. Remote Sens. 2024, 16, 1684. [Google Scholar] [CrossRef]
- Zhang, S.; Xu, L.; Long, R.; Chen, L.; Wang, S.; Ning, S. Quantitative Assessment and Impact Analysis of Land Surface Deformation in Wuxi Based on PS-InSAR and GARCH Model Remote Sensing. Remote Sens. 2024, 16, 1568. [Google Scholar] [CrossRef]
- Jin, S.; Bi, H.; Guo, Q.; Zhang, J.; Hong, W. Iterative Adaptive Based Multi-Polarimetric SAR Tomography of the Forested Areas Remote Sensing. Remote Sens. 2024, 16, 1605. [Google Scholar] [CrossRef]
- Cheng, S.; Zheng, H.; Yu, W.; Lv, Z.; Chen, Z.; Qiu, T. A Barrage Jamming Suppression Scheme for DBF-SAR System Based on Elevation Multichannel Cancellation. IEEE Geosci. Remote Sens. Lett. 2023, 20, 1–5. [Google Scholar] [CrossRef]
- Ammar, M.A.; Abdel-Latif, M.S.; Elgamel, S.A.; Azouz, A. Performance Enhancement of Convolution Noise Jamming Against SAR. In Proceedings of the 2019 36th National Radio Science Conference (NRSC), Port Said, Egypt, 16–18 April 2019; pp. 126–134. [Google Scholar]
- Chang, X.; Li, Y.; Zhao, Y.; Du, Y.; Liu, D.; Wan, J. A Scattered Wave Deceptive Jamming Method Based on Genetic Algorithm against Three Channel SAR GMTI. In Proceedings of the 2021 CIE International Conference on Radar (Radar), Haikou, Hainan, China, 15–19 December 2021; pp. 414–419. [Google Scholar]
- Zhao, P.; Dai, D.; Wu, H.; Pang, B. SAR Repeater Jamming Detection Method Based on Circle Frequency Filter. In Proceedings of the 2021 2nd International Conference on Electronics, Communications and Information Technology (CECIT), Sanya, China, 27–29 December 2021; pp. 1108–1112. [Google Scholar]
- Zhang, J.; Dai, D.; Xing, S.; Xiao, S.; Pang, B. A novel barrage repeater jamming against SAR-GMTI. In Proceedings of the 2016 10th European Conference on Antennas and Propagation (EuCAP), Davos, Switzerland, 10–15 April 2016; pp. 1–5. [Google Scholar]
- Li, J.; Jiang, B.; Liang, W.; Zhu, J.; Xiong, Y.; Tang, B. Swing Error Phase Modulation Jamming Method of Airborne SAR. In Proceedings of the 2019 International Conference on Communications, Information System and Computer Engineering (CISCE), Haikou, China, 5–7 July 2019; pp. 31–35. [Google Scholar]
- Huang, H.; Zhou, Y. An Inter/Intra-Pulse Partly Coherent Jamming Style against Synthetic Aperture Radar. In Proceedings of the 2012 IEEE 11th International Conference on Signal Processing, Beijing, China, 21–25 October 2012; Volume 3, pp. 2020–2022. [Google Scholar]
- Lee, Y.; Park, J.; Shin, W.; Lee, K.; Kang, H. A study on jamming performance evaluation of noise and deception jammer against SAR satellite. In Proceedings of the 2011 3rd International Asia-Pacific Conference on Synthetic Aperture Radar (APSAR), Seoul, Republic of Korea, 26–30 September 2011; pp. 1–3. [Google Scholar]
- Liu, Y.; Li, T.; Gu, Z. Research on SAR Active Deception Jamming Scenario Generation Technique. In Proceedings of the 2015 Fifth International Conference on Instrumentation and Measurement, Computer, Communication and Control (IMCCC), Qinhuangdao, China, 18–20 September 2015; pp. 152–156. [Google Scholar]
- Ji, P.; Xing, S. An Anti-Jamming Method Against SAR Stationary Deceptive Targets Based on DPCA Processing. In Proceedings of the 2019 IEEE 4th International Conference on Signal and Image Processing (ICSIP), Wuxi, China, 19–21 July 2019; pp. 264–268. [Google Scholar]
- Qiu, X.; Zhang, T.; Li, S.; Yuan, T.; Wang, F. SAR Anti-Jamming Technique Using Orthogonal LFM-PC Hybrid Modulated Signal. In Proceedings of the 2018 China International SAR Symposium (CISS), Shanghai, China, 10–12 October 2018; pp. 1–6. [Google Scholar]
- Sun, Z.; Zhu, Z. Anti-Jamming Method for SAR Using Joint Waveform Modulation and Azimuth Mismatched Filtering. IEEE Geosci. Remote Sens. Lett. 2023, 20, 1–5. [Google Scholar] [CrossRef]
- Yu, Q.; Zhu, D.; Wang, Y. Anti-jamming Method of MIMO-SAR with Dual Modulation of APC and OFDM. In Proceedings of the 2022 7th International Conference on Signal and Image Processing (ICSIP), Suzhou, China, 20–22 July 2022; pp. 701–706. [Google Scholar]
- Zhong, T. Sar Anti-Jamming Method Based on Optimization of Phase-Jittered LFM Signal. In Proceedings of the 2021 CIE International Conference on Radar (Radar), Haikou, China, 15–19 December 2021; pp. 796–799. [Google Scholar]
- Dragomiretskiy, K.; Zosso, D. Variational mode decomposition. IEEE Trans. Signal Process. 2013, 62, 531–544. [Google Scholar] [CrossRef]
- Zhao, S.; Chen, Y.; Ur Rehman, A.; Liang, F.; Wang, S.; Zhao, Y.; Deng, W.; Ma, Y.; Cheng, Y. The Inter-Turns Short Circuit Fault Detection Based on External Leakage Flux Sensing and VMD-HHT Analytical Method for DFIG. In Proceedings of the 2021 International Conference on Sensing, Measurement & Data Analytics in the era of Artificial Intelligence (ICSMD), Nanjing, China, 21–23 October 2021; pp. 1–5. [Google Scholar]
- Wu, Y.; Lin, Y.; Wang, J.; Qin, X.; Du, P.; Wang, F. Application of VMD in Fault Diagnosis for Rolling Bearing under Variable Speed Conditions. In Proceedings of the 2018 IEEE 3rd International Conference on Cloud Computing and Internet of Things (CCIOT), Dalian, China, 20–21 October 2018; pp. 275–278. [Google Scholar]
- Li, L. Research on Monthly Runoff Prediction based on VMD-BP model. In Proceedings of the 2023 5th International Conference on Frontiers Technology of Information and Computer (ICFTIC), Qingdao, China, 8–10 December 2023; pp. 740–744. [Google Scholar]
- McCorkle, J.W. Focusing of synthetic aperture ultra wideband data. In Proceedings of the IEEE International Conference on Systems Engineering, Dayton, OH, USA, 1–3 August 1993; pp. 1–5. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| K = 3 | K = 4 | K = 5 | K = 6 | K = 7 | |
| NAM | 0.8805 | 0.9301 | 0.9286 | 0.9354 | 0.9328 |
| NFM | 0.8791 | 0.9308 | 0.9268 | 0.9349 | 0.9323 |
| SFM | 0.8805 | 0.9310 | 0.8851 | 0.9346 | 0.9330 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yuan, Y.; Zhan, C.; Tian, W.; Chen, S.; Zhang, S. Anti-Jamming Imaging Method for Carrier-Free Ultra-Wideband Airborne SAR Based on Variational Modal Decomposition. Remote Sens. 2024, 16, 2128. https://doi.org/10.3390/rs16122128
Yuan Y, Zhan C, Tian W, Chen S, Zhang S. Anti-Jamming Imaging Method for Carrier-Free Ultra-Wideband Airborne SAR Based on Variational Modal Decomposition. Remote Sensing. 2024; 16(12):2128. https://doi.org/10.3390/rs16122128
Chicago/Turabian StyleYuan, Yue, Chengjin Zhan, Wuqi Tian, Si Chen, and Shuning Zhang. 2024. "Anti-Jamming Imaging Method for Carrier-Free Ultra-Wideband Airborne SAR Based on Variational Modal Decomposition" Remote Sensing 16, no. 12: 2128. https://doi.org/10.3390/rs16122128
APA StyleYuan, Y., Zhan, C., Tian, W., Chen, S., & Zhang, S. (2024). Anti-Jamming Imaging Method for Carrier-Free Ultra-Wideband Airborne SAR Based on Variational Modal Decomposition. Remote Sensing, 16(12), 2128. https://doi.org/10.3390/rs16122128