


MeSat Mission: Exploring Martian Environment with THz Radiometer Payload and Optimal Trajectory

Abstract
1. Introduction
2. MeSat’s Aims and Its Contrast with Previous Martian Projects
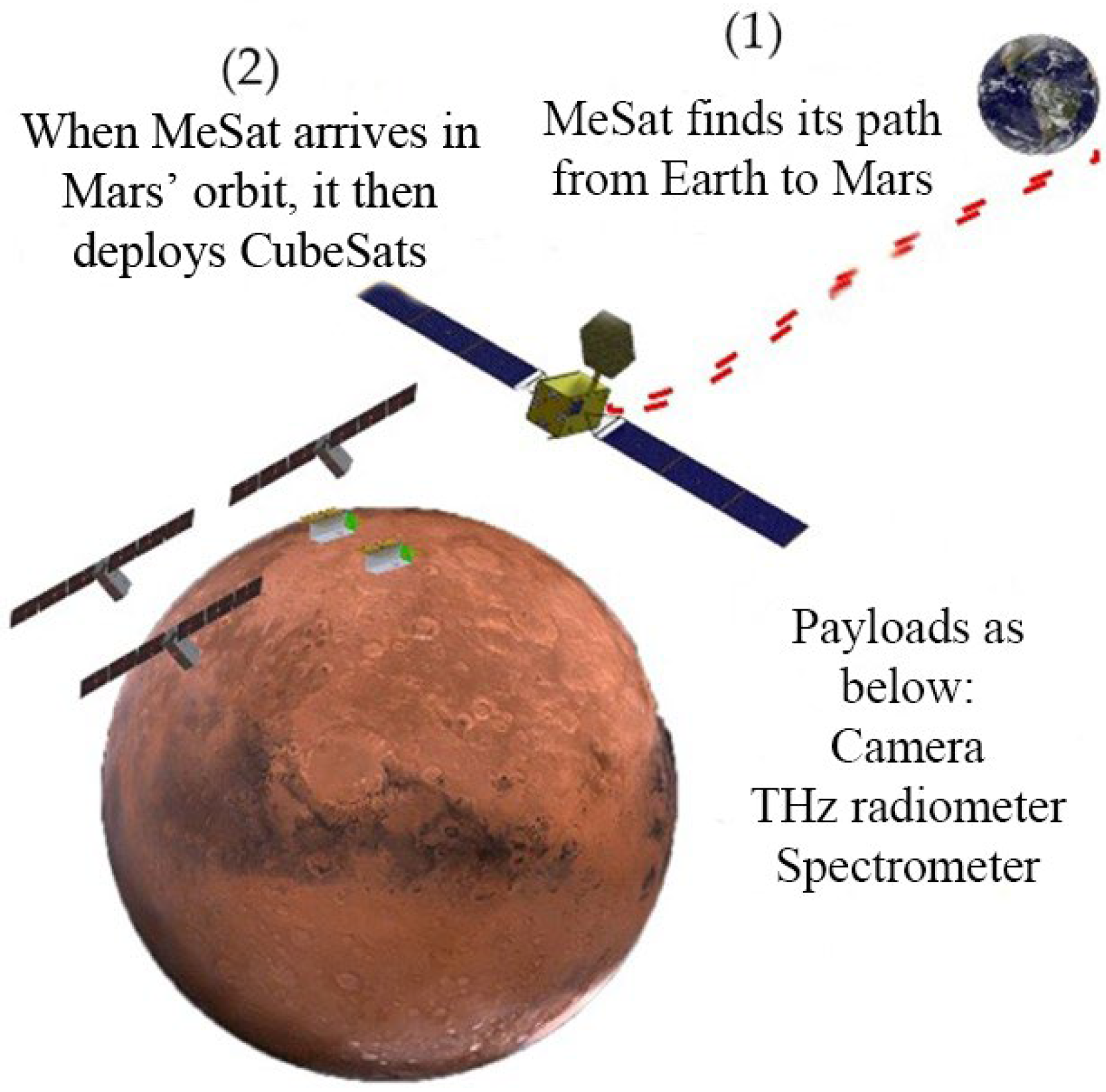
3. MeSat: Mission Scenario and Technical Framework
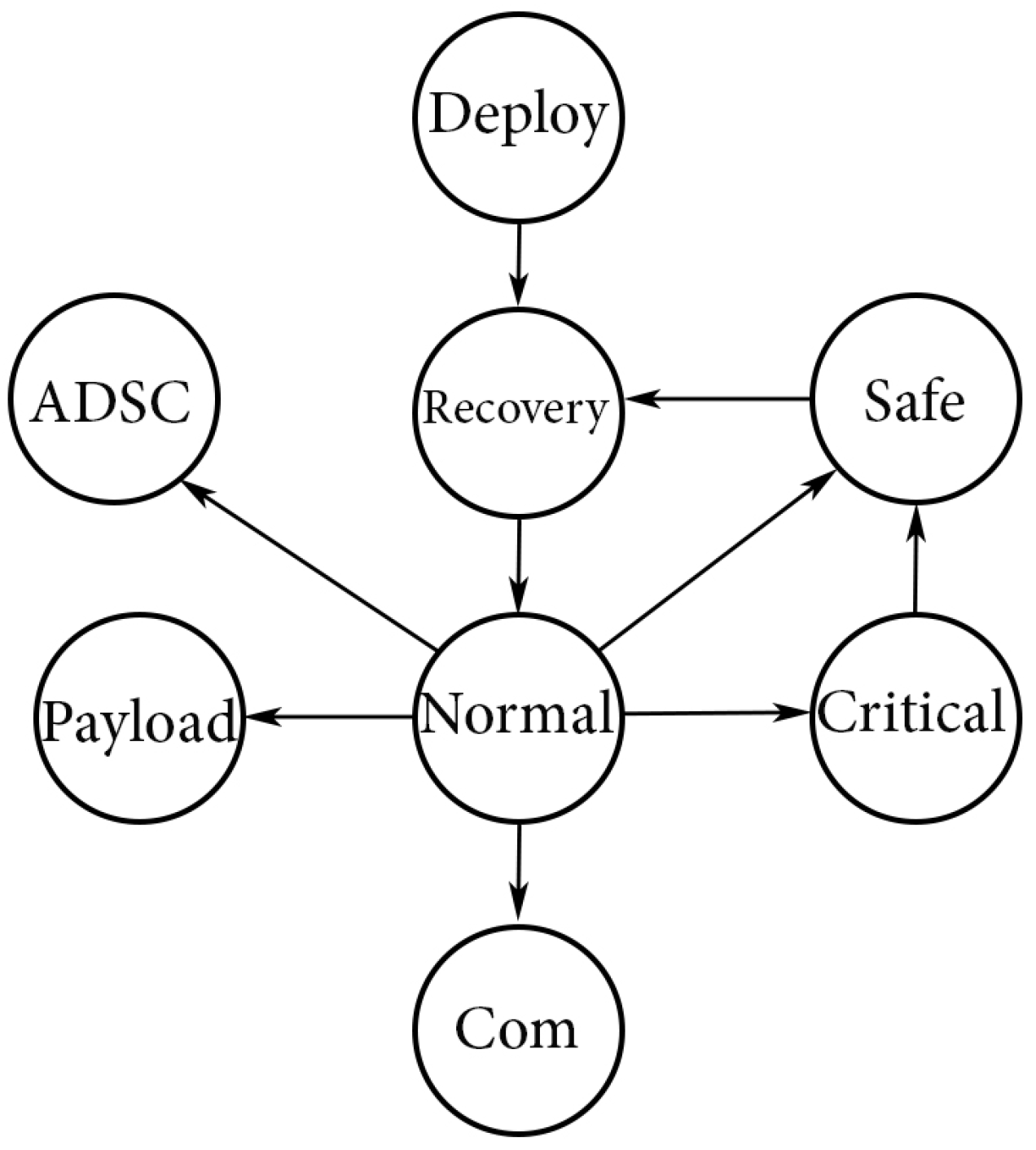
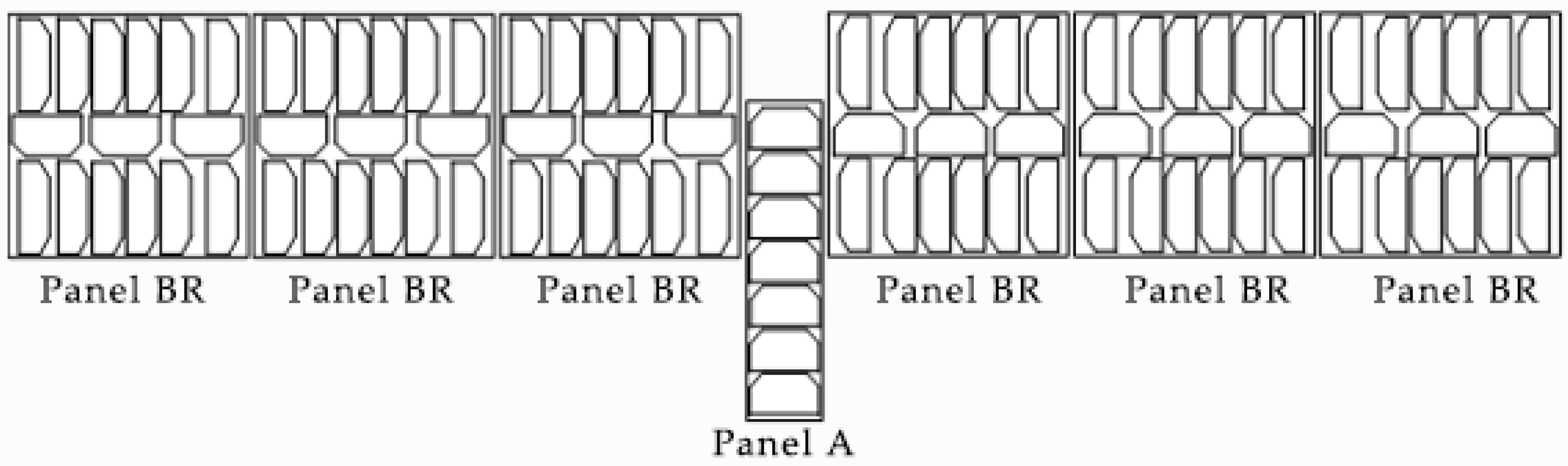
3.1. CubeSat Power Subsystem Performance and Functions Methodology
3.2. Link Budget
4. Mission Design Analysis for Low-Thrust Trajectory Optimization to Mars Considering Full Perturbation System
4.1. System Description
4.2. Low-Thrust Trajectory Optimization Description
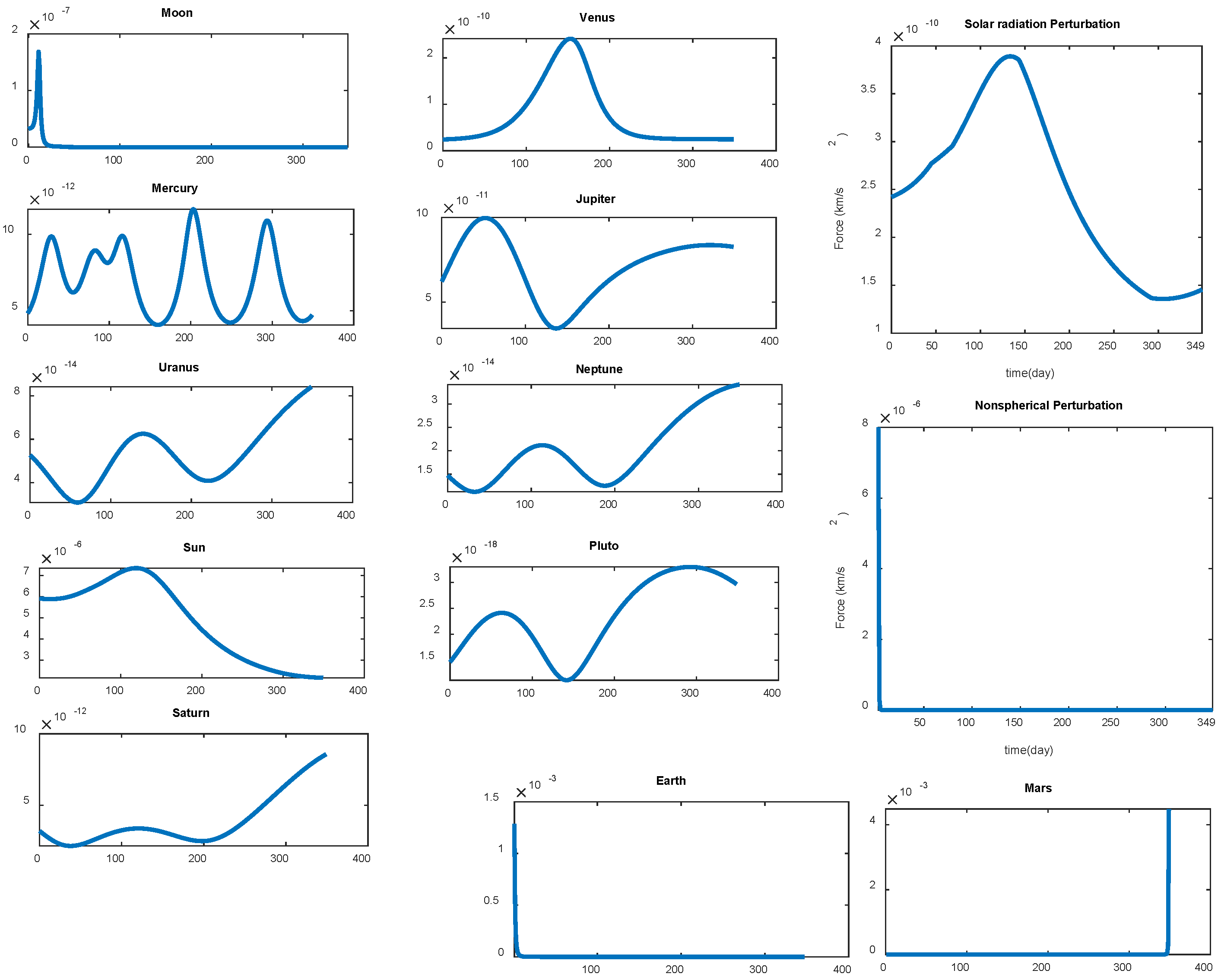
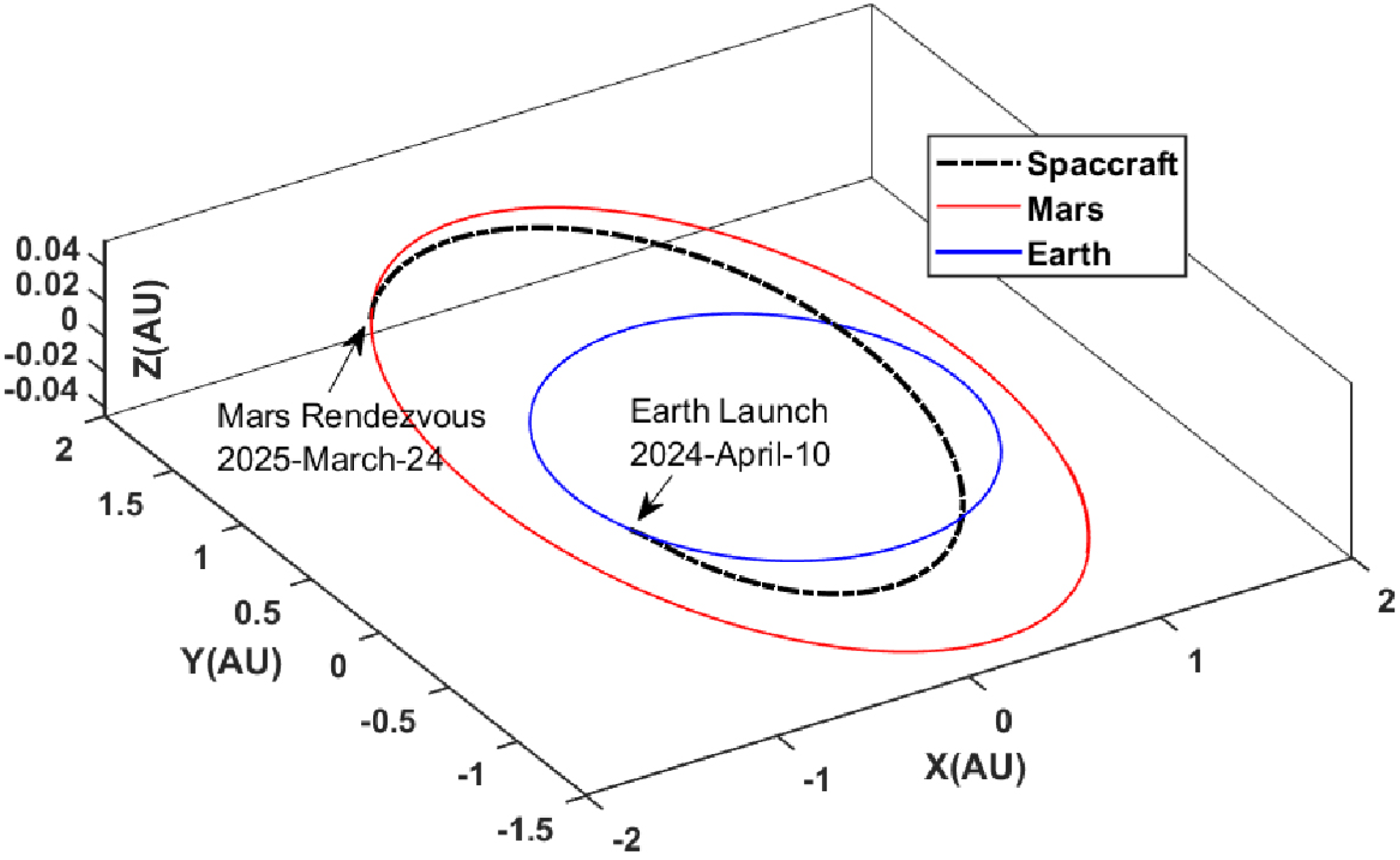
4.3. Numerical Simulations
- Optimal hyperbolic excess velocity: (km/s)
- Launch date: 10 April 2024
- Mars rendezvous date: 24 March 2025
- Time of flight (TOF): 348 days
5. MeSat Mission Satellite System Design
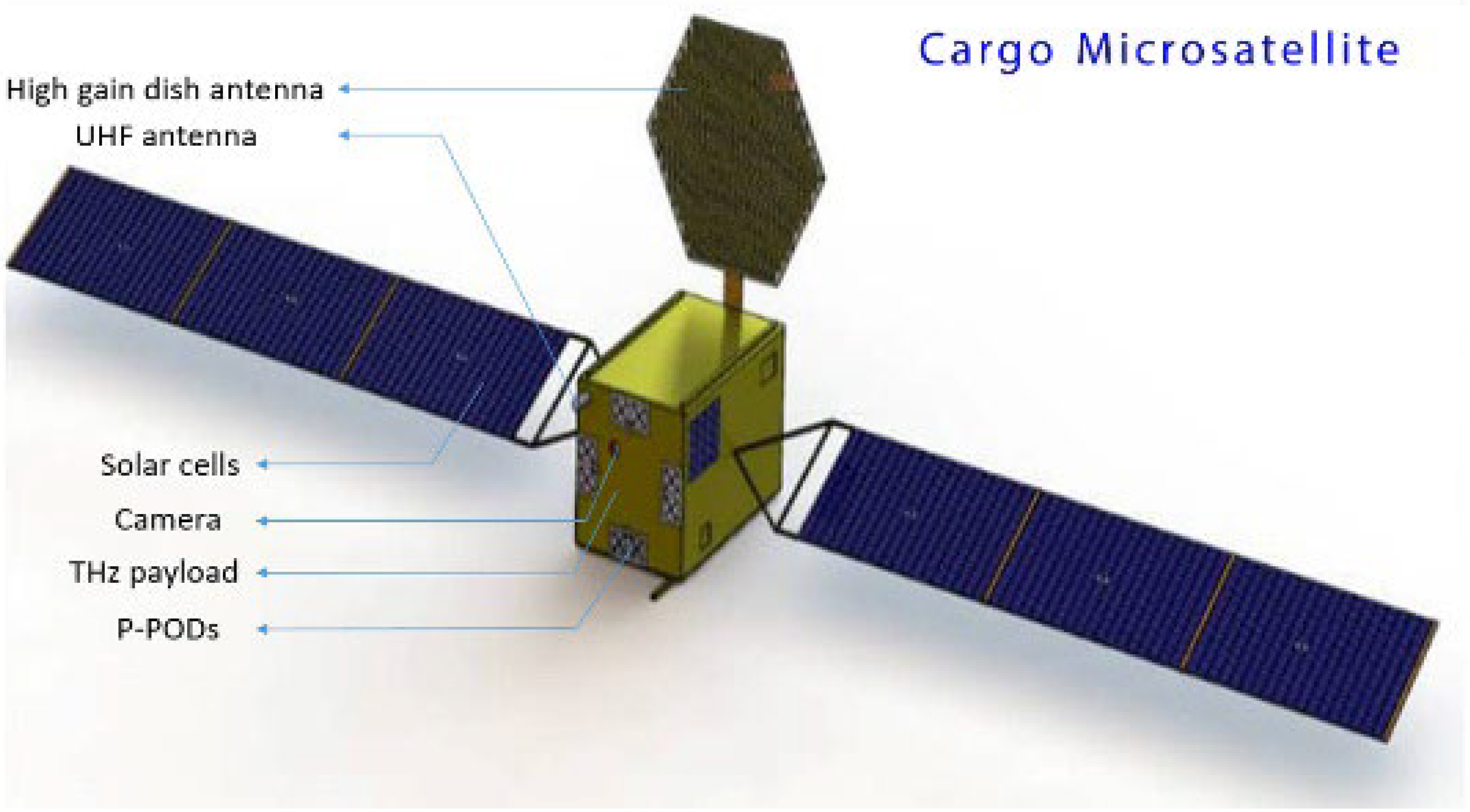
5.1. Cargo Microsatellite
5.2. CubeSats System Design
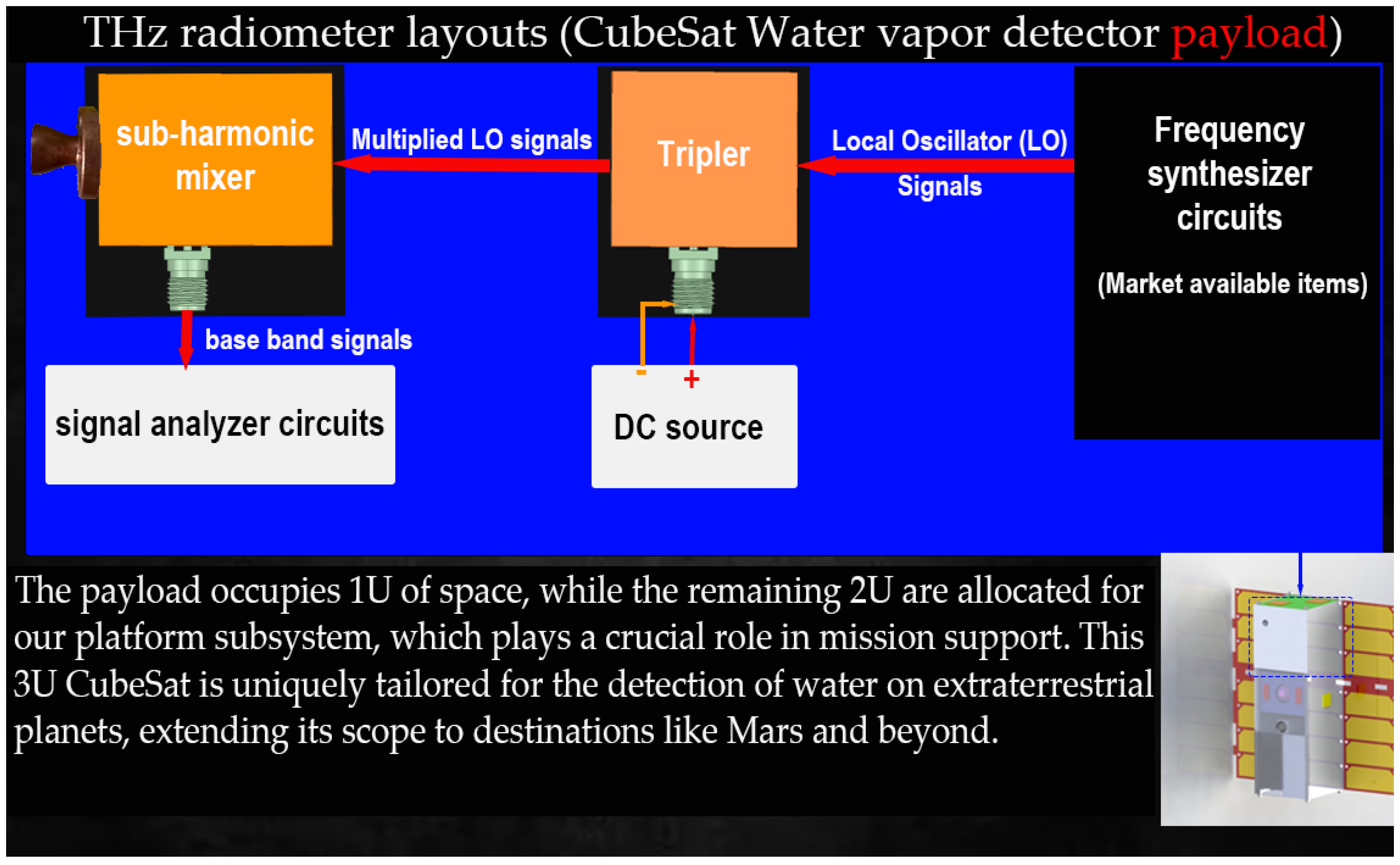
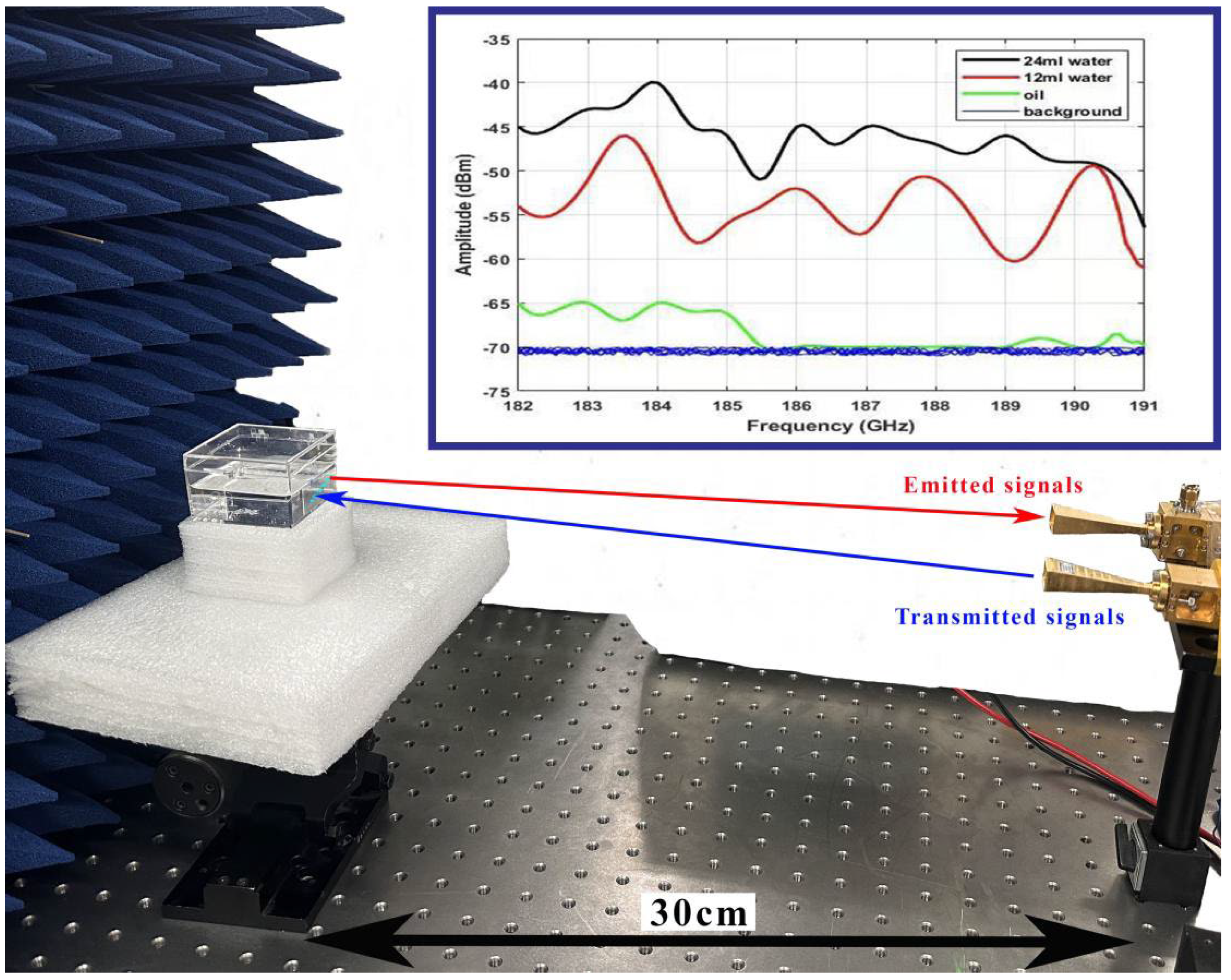
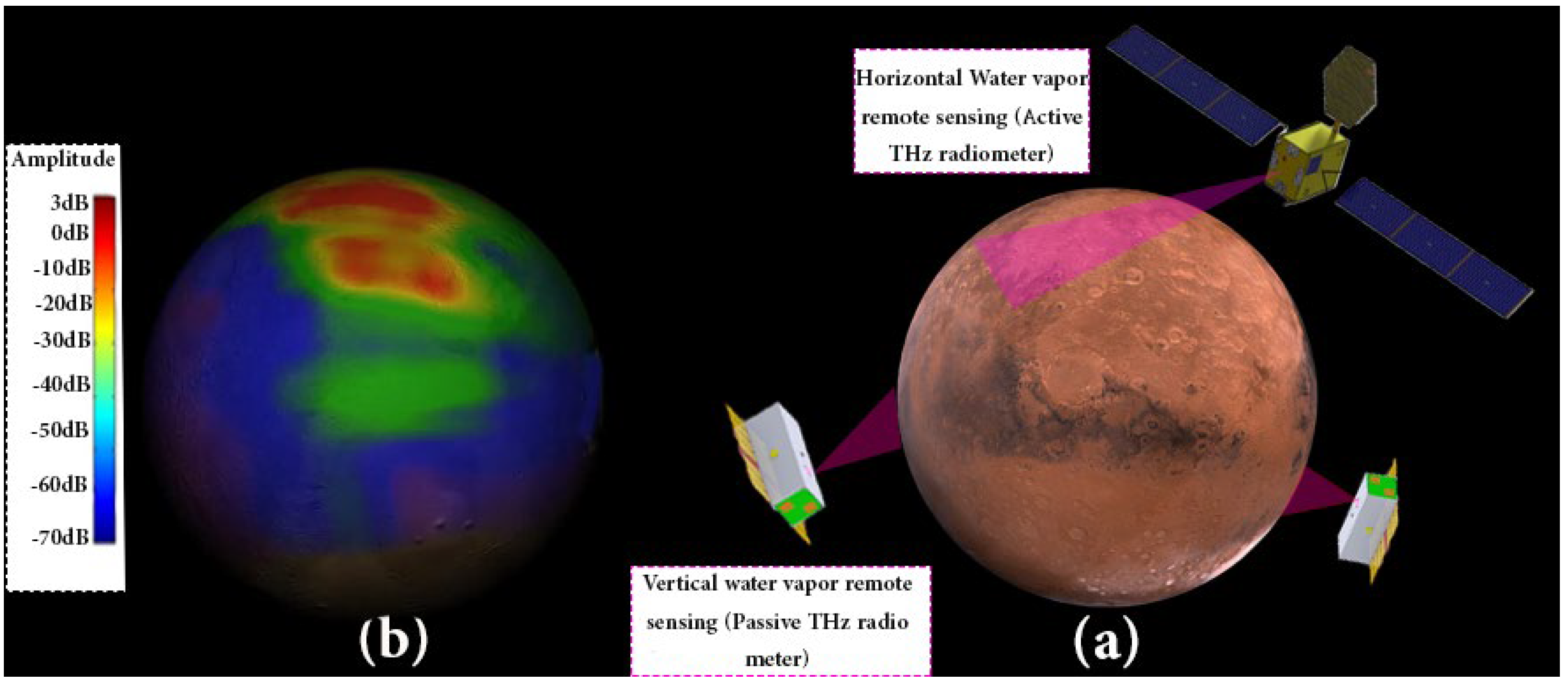
6. The Mission Scientific Payload: Usage of THz Radiometer for Study of Mars Atmosphere
Complete System Design for THz Spectrometers
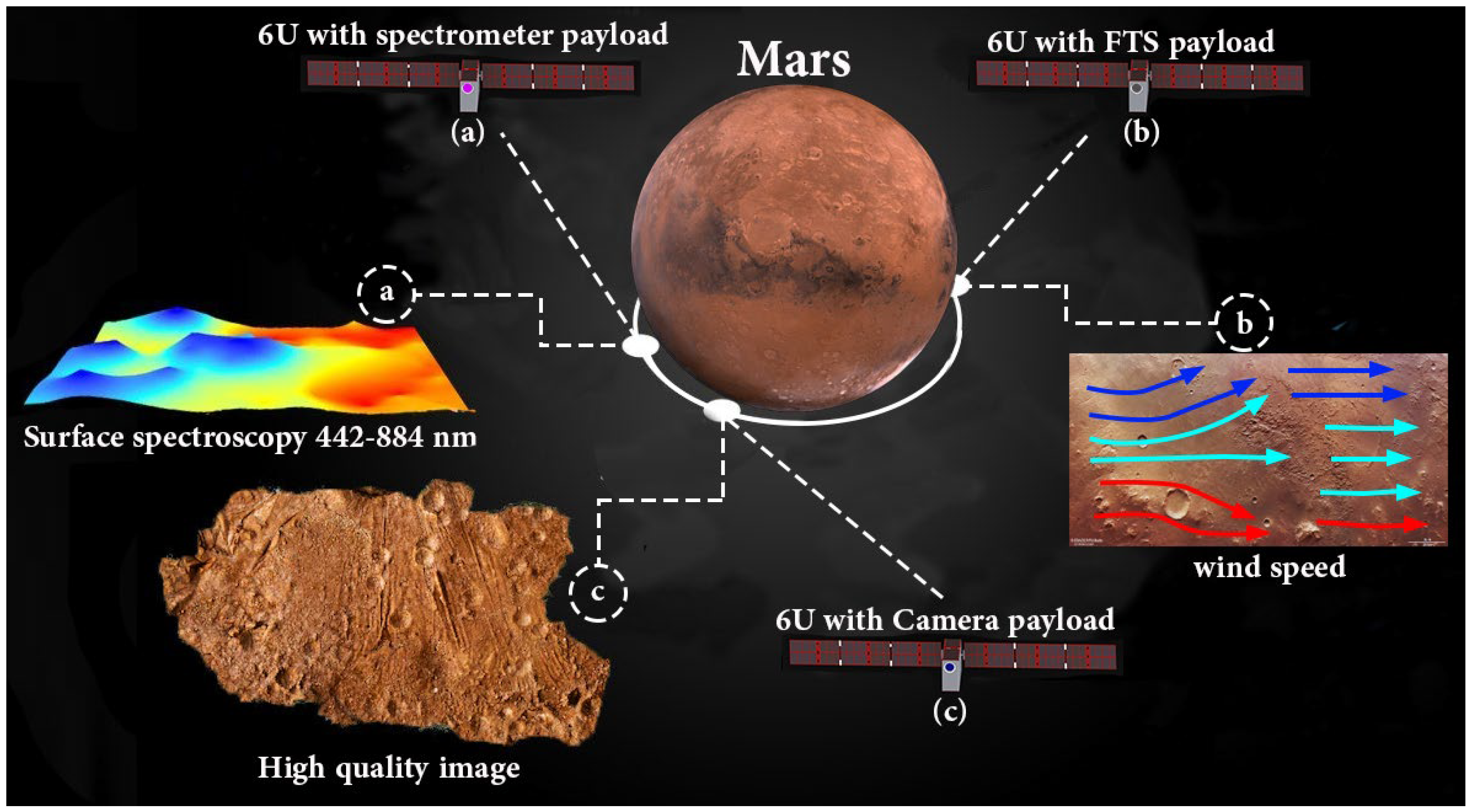
7. Expected Data from the Missions
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- The Guardian. Available online: https://www.theguardian.com/books/2018/oct/19/brief-answers-to-the-big-questions-stephen-hawking-review (accessed on 19 October 2018).
- NASA. Available online: https://www.nasa.gov/wp-content/uploads/2015/01/benefits-stemming-from-space-exploration-2013-tagged.pdf (accessed on 20 September 2013).
- Francesca, F.; Marta, V.P.; Claudia, P. Advantages and Limitations of Current Microgravity Platforms for Space Biology Research. Appl. Sci. 2020, 11, 68. [Google Scholar] [CrossRef]
- The Space Review. Available online: https://www.thespacereview.com/article/3193/1 (accessed on 13 March 2017).
- Seth, D.B.; Jacob, D.H.; Shawn, D.D. Would contact with extraterrestrials benefit or harm humanity? A scenario analysis. Acta Astronaut. 2011, 68, 2114–2129. [Google Scholar] [CrossRef]
- Sergey, K.; Vladimir, L. Human Life and Evolution in Biospheres on Earth and Outer Space: Problems and Prospects. Future Hum. Image 2021, 15, 39–58. [Google Scholar]
- NASA. Available online: https://www.nasa.gov/image-article/nasas-journey-mars/#:~:text=NASA%20is%20developing%20the%20capabilities,Policy%2C%20also%20issued%20in%202010 (accessed on 1 December 2014).
- Alred, J.W.; Siegfried, W.H. Maximization of benefits from the space exploration initiative. Acta Astronaut. 1992, 28, 357–363. [Google Scholar] [CrossRef]
- Bette, S.; Andy, S.; James, B.; Sarah, L.C.; Kevin, S.; Erin, M.; Julie, R. Development of a NASA roadmap for planetary protection to prepare for the first human missions to Mars. Life Sci. Space Res. 2023, 38, 1–7. [Google Scholar] [CrossRef]
- Ritu, S.L. Public-private linkages and the case of asteroid mining. Technol. Anal. Strateg. Manag. 2022. [Google Scholar] [CrossRef]
- Matthew, J.H.; Kelly, S.F.; Emily, A.H.; Paul, G.B.; Tim, G.; Cassandra, M.C. Protecting the Planet or Destroying the Universe? Understanding Reactions to Space Mining. Sustainability 2022, 14, 4119. [Google Scholar] [CrossRef]
- Anna, C.S. Challenges and Opportunities for Bioactive Compound and Antibiotic Discovery in Deep Space. J. Indian Inst. Sci. 2023, 103, 819–832. [Google Scholar]
- Harvard International Review. Available online: https://hir.harvard.edu/economics-of-the-stars/ (accessed on 8 April 2022).
- Pavel, S. Asteroid Mining Tax as a Tool to Keep Peace in Outer Space. Space Policy 2023, 65, 101555. [Google Scholar] [CrossRef]
- Science In The News (SITN). Available online: https://sitn.hms.harvard.edu/flash/2019/water-beyond-earth-the-search-for-the-life-sustaining-liquid/ (accessed on 26 September 2019).
- Astrobiology at NASA. Available online: https://astrobiology.nasa.gov/education/alp/water-so-important-for-life/#:~:text=It%20is%20abundant%20on%20Earth,the%20planet%20could%20support%20life (accessed on 1 December 2023).
- Althaf, H.B.; Danish, K. Utilisation of Space Robotics in Making Plans in the Works to Overcome Huge Challenges and Send Humans to Mars By NASA. TTIRAS 2022, 2, 30–35. [Google Scholar] [CrossRef]
- Xiao, S.Y.; Rakhyun, E.K. Twards earth-space governance in a multi-planetary era. Earth Syst. Gov. 2023, 16, 100173. [Google Scholar] [CrossRef]
- NASA Mariner 4 Mission. Available online: https://science.nasa.gov/mission/mariner-4/ (accessed on 5 March 2024).
- NASA Mars Science. Available online: https://mars.nasa.gov/technology/helicopter/ (accessed on 30 July 2020).
- Favaloro, N.; Saccone, G.; Piscitelli, F.; Olponi, R.; Leoncini, P.; Catalano, P.; Visingardi, A.; Noviello, M.C. Enabling Technologies for Space Exploration Missions: The CIRA-TEDS Program Roadmap Perspectives. Aerotec. Missili Spaz. 2023, 102, 187–197. [Google Scholar] [CrossRef]
- Liu, X.; Xu, W.; Qi, H.; Ren, X.; Liu, J.; Li, L.; Yan, Z.; Liu, C.; Chen, J.; Zhang, Z.; et al. Development and Testing of the MarSCoDe LIBS Calibration Target in China’s Tianwen-1 Mars Mission. Space Sci. Rev. 2023, 219, 43. [Google Scholar] [CrossRef]
- Richard, B. Emirates Mars Mission takes first high-resolution images of Martian moon Deimos. Phys. World 2023, 36, 11ii. [Google Scholar] [CrossRef]
- NASA InSight Mission. Available online: https://mars.nasa.gov/news/9452/nasa-insight-study-finds-mars-is-spinning-faster/?site=insight (accessed on 7 August 2023).
- Indian Space Agency. Available online: https://www.isro.gov.in/MarsOrbiterMissionSpacecraft.html#:~:text=Mars%20Orbiter%20Mission%20(MOM)%2C,orbit%20on%20Sept%2024%2C%202021 (accessed on 18 September 2023).
- NASA. Available online: https://science.nasa.gov/mission/phoenix/ (accessed on 4 August 2007).
- NASA. Available online: https://science.nasa.gov/mission/mer-opportunity/ (accessed on 7 July 2003).
- The Planetary Society. Available online: https://www.planetary.org/space-missions/viking (accessed on 5 March 2024).
- Michael, C.K.; Kenneth, S.E. Mars Global Surveyor Mars Orbiter Camera: Interplanetary cruise through primary mission. J. Geophys. Res. 2001, 106, 23429–23570. [Google Scholar] [CrossRef]
- Saunders, R.S.; Arvidson, R.E.; Badhwar, G.D.; Boynton, W.V.; Christensen, P.R.; Cucinotta, F.A.; Feldman, W.C.; Gibbs, R.G.; Kloss, C., Jr.; Landano, M.R.; et al. 2001 Mars Odyssey Missions Summary. Space Sci. Rev. 2004, 110, 1–36. [Google Scholar] [CrossRef]
- Krasmopolsky, V.A. Vertical distribution of water vapor and mars model lower and middle atmosphere. Icarus 1979, 37, 182–189. [Google Scholar] [CrossRef]
- Seymour, L.H. The vertical distribution of water vapor in the atmosphere of Mars. Icarus 1976, 28, 269–278. [Google Scholar] [CrossRef]
- Michel, D.S. The annual cycle of water vapor on Mars as observed by the Thermal Emission Spectrometer. J. Geophys. Res. 2002, 107, 25-1–25-19. [Google Scholar] [CrossRef]
- McCleese, D.J.; Schofield, J.T.; Taylor, F.W.; Calcutt, S.B.; Foote, M.C.; Kass, D.M.; Leovy, C.B.; Paige, D.A.; Read, P.L.; Zurek, R.W. Mars Climate Sounder: An investigation of thermal and water vapor structure, dust and condensate distributions in the atmosphere, and energy balance of the polar regions. J. Geophys. Res. 2007, 112. [Google Scholar] [CrossRef]
- Luca, M.; Dmitrij, V.T.; Theresse, E.; Riccardo, M.; Francois, F.; Horst, U.K.; Jean, P.B. Annual survey of water vapor behavior from the OMEGA mapping spectrometer onboard Mars Express. Icraus 2011, 213, 480–495. [Google Scholar] [CrossRef]
- Alexander, T.; Anna, F.; Oleg, K.; Frank, M.; Jean, L.B.; Alexander, R.; Michael, D.S. Mars’ water vapor mapping by the SPICAM IR spectrometer: Five martian years of observations. Icarus 2015, 251, 50–64. [Google Scholar] [CrossRef]
- Alain, S.J.K.; Michael, D.S.; Scatt, D.G. Understanding the water cycle above the north polar cap on Mars using MRO CRISM retrievals of water vapor. Icarus 2019, 324, 722–735. [Google Scholar] [CrossRef]
- Alexey, A.P. Martian atmospheric water vapor abundances in MY26-30 from Mars Express PFS/LW observations. Icarus 2022, 379, 114975. [Google Scholar] [CrossRef]
- Stevens, M.H.; Cangi, E.M.; Deighan, J.; Jain, S.K.; Chaffin, M.S.; Evans, J.S.; Gupta, S.; Clarke, J.T. MAVEN/IUVS Observations of OH Prompt Emission: Daytime Water Vapor in the Thermosphere of Mars. JGR Planets 2024, 129, e2023JE007982. [Google Scholar] [CrossRef]
- Mikhail, L.; Alexander, T.; Benjamin, T.; Anna, A.F.; Oleg, K.; Kevin, S.O.; Franck, M.; Franck, L. Evidence of rapid hydrogen chloride uptake on water ice in the atmosphere of Mars. Icarus 2024, 411, 115960. [Google Scholar] [CrossRef]
- Alexey, A.P.; Timonthy, H.M.; Michael, D.S. Retrievals of vertical distribution of Martian water vapor from combined day and night MGS TES nadir spectra. Icarus 2024, 409, 115869. [Google Scholar] [CrossRef]
- David, M.S.; Elizabeth, J.S.; Robert, H.G.; Thomas, M.G. Atmospheric absorption of terahertz radiation and water vapor continuum effects. J. Quant. Spectrosc. Radiat. Transf. 2013, 127, 49–63. [Google Scholar] [CrossRef]
- JPL. Mars Exploration Program Analysis Group (MEPAG). Available online: https://mepag.jpl.nasa.gov/reports.cfm (accessed on 30 November 2020).
- NASA JPL. Available online: https://www.jpl.nasa.gov/missions/mars-exploration-rover-opportunity-mer (accessed on 7 July 2003).
- NASA. Available online: https://www.nasa.gov/directorates/stmd/6-technologies-nasa-is-advancing-to-send-humans-to-mars/ (accessed on 17 July 2020).
- Feng, D.; Robin, D.W. Prospects for Water Vapor Detection in the Atmospheres of Temperate and Arid Rocky Exoplanets around M-dwarf Stars. Astrophys. J. Lett. 2022, 925, L8. [Google Scholar]
- Jacob, D. The role of water vapour in the atmosphere. A short overview from a climate modeller’s point of view. Phys. Chem. of Earth Part A Solid Earth Geod. 2001, 26, 523–527. [Google Scholar] [CrossRef]
- Adam, J.R.W.S.; Ying, F.; Jonathan, J.F.; Tyler, D.R.; Mark, S.M. Detecting and Characterizing Water Vapor in the Atmospheres of Earth Analogs through Observation of the 0.94 μm Feature in Reflected Light. Astron. J. 2020, 159, 36. [Google Scholar]
- Smithsonian Magazine. Available online: https://www.smithsonianmag.com/science-nature/water-vapor-detected-atmosphere-exoplanet-habitable-zone-180973100/ (accessed on 11 September 2019).
- Saghamanesh, M.; Taheri, E.; Baoyin, H. Interplanetary Gravity-Assist Fuel-Optimal Trajectory Optimization with Planetary and Solar Radiation Pressure Perturbations. Celest. Mech. Dyn. Astron. 2019, 132, 1–21. [Google Scholar] [CrossRef]
- Saghamanesh, M.; Baoyin, H. Optimal Gravity-Assist Low-Thrust Trajectory Using a Robust Homotopic Approach. In Proceedings of the 2018 IEEE CSAA Guidance, Navigation and Control Conference (CGNCC), Xiamen, China, 10–12 August 2018. [Google Scholar]
- George, R.; Srivastava, A.K.; Naidu, P.; Reddy, K.R.; Rao, K.M.M. THz radiometry and imaging—A review. Infrared Phys. Technol. 2018, 87, 46–64. [Google Scholar]
- Sutar, S.S.; Mane, S.R.; Kasar, S.S. Design and Simulation of 557 GHz THz Radiometer for Space Applications. Procedia Comput. Sci. 2015, 70, 34–39. [Google Scholar]
- Knight, S.; Rabideau, G.; Chien, S.; Engelhardt, B.; Sherwood, R. Casper: Space exploration through continuous planning. IEEE Intell. Syst. 2001, 16, 70–75. [Google Scholar]
- Matthew, P.G. The Mars Pathfinder mission. J. Geophys. Res. Planets 1997, 102, 3953–3965. [Google Scholar] [CrossRef]
- NASA. Available online: https://science.nasa.gov/mission/odyssey/ (accessed on 7 April 2001).
- Arturo, R. Europe’s Path to Mars: The European Space Agency’s Mars Express Mission. Hist. Stud. Nat. Sci. 2011, 41, 123–178. [Google Scholar] [CrossRef]
- Paul, W.; Michael, D.S. Atmospheric entry profiles from the Mars Exploration Rovers Spirit and Opportunity. Icarus 2006, 185, 133–142. [Google Scholar] [CrossRef]
- Deborah, S.B.; Kevin, P.T. Phoenix surface mission operations processes. J. Geophys. Res. Planets 2008, 113. [Google Scholar] [CrossRef]
- Vandi, V.; Joseph, C.; Stephan, K. The evolution of the curiosity rover sampling chain. J. Field Robot. 2019, 37, 729–753. [Google Scholar] [CrossRef]
- Fowler, C.M.; McFadden, J.; Hanley, K.G.; Mitchel, D.L.; Curry, S.; Jakosky, B. In-Situ Measurements of Ion Density in the Martian Ionosphere: Underlying Structure and Variability Observed by the MAVEN-STATIC Instrument. JGR Space Phys. 2022, 127, e2022JA030352. [Google Scholar] [CrossRef]
- NASA. Available online: https://mars.nasa.gov/mars-exploration/missions/esa-exomars-rover/ (accessed on 12 March 2020).
- Lange, L.; Forget, F.; Banfield, W.B.; Wolff, M.; Spiga, A.; Millour, E. InSight Pressure Data Recalibration, and Its Application to the Study of Long-Term Pressure Changes on Mars. JGR Planet 2022, 127, e2022JE007190. [Google Scholar] [CrossRef]
- Stefano, C.A. Single-Launch Deployment Strategy for Lunar Constellations. Appl. Sci. 2023, 13, 5104. [Google Scholar] [CrossRef]
- Stefano, S.; Angelo, C.; Alessandra, M.; Erdem, T.; Eric, B.; Bastiaan, B.; Francesco, T. Designing the Radio Link for a Lunar CubeSat: The LUMIO Case. In Proceedings of the 72th International Astronautical Congress (IAC), Dubai, United Arab Emirates, 25–29 October 2021. [Google Scholar]
- Terzoli, S.; Abreu, R.; Costa, J.; Rodrigues, H. CubeSat Deep-Space Communication: Link Budget and Modulation Analysis. Sensors 2021, 21, 4759. [Google Scholar] [CrossRef]
- Saghamanesh, M.; Novinzadeh, A. Optimal guidance of spacecraft rendezvous via free initial velocity vector. Proceedings of the Institution of Mechanical Engineers. J. Aerosp. Eng. 2014, 228, 1020–1032. [Google Scholar]
- Saghamanesh, M.; Baoyin, H. A robust homotopic approach for continuous variable low-thrust trajectory optimization. Adv. Space Res. 2018, 62, 3095–3113. [Google Scholar] [CrossRef]
- Saghamanesh, M.; Baoyin, H. Practical Mission Design for Mars Trajectory Optimization Based on the Ephemeris Model and Full Perturbation System. Adv. Astronaut. Sci. 2018, 165, 1293–1313. [Google Scholar]
- Saghamanesh, M.; Taheri, E.; Baoyin, H. Systematic Low-Thrust Trajectory Design to Mars Based on a Full Ephemeris Modelling. Adv. Space Res. 2019, 64, 2356–2378. [Google Scholar] [CrossRef]
- Vahid, R.; Hu, W. Anticipation of Air Pollution Density Patterns Affected by Wind Velocity Based on Fourier Transform Spectrometer Across the Silk Road Countries by Using EcoBeltSat—A 6U CubeSat. IEEE J. Miniaturization Air Space Syst. 2021, 3, 2–8. [Google Scholar] [CrossRef]
- China National Space Administration. Available online: https://www.cnsa.gov.cn/english/n6465652/n6465653/c6809882/content.html (accessed on 23 September 2023).
- UAE Space Agency. Available online: https://www.emiratesmarsmission.ae/ (accessed on 20 July 2020).
- eoPortal Satellites Mission Database. Available online: https://www.eoportal.org/satellite-missions/race (accessed on 4 March 2014).
- Ossenkopf, V.; Menten, K.M.; Güsten, C.; Nyman, L.A. GREAT: The SOFIA high-frequency heterodyne instrument. Astron. Astrophys. 2023, 518, L1. [Google Scholar]
- Nanosat Data Base. Available online: https://www.nanosats.eu/sat/micromas-2 (accessed on 1 January 2018).
- NASA Portable. Available online: https://weather.ndc.nasa.gov/tropics/ (accessed on 30 June 2021).
- Vahid, R.; Weidong, H.; Mohammad, K.T. Water Recognition on the Moon by Using THz Heterodyne-Spectrometer for Identifying the Appropriate Locations to Extract Water for Providing Oxygen for Breathing and Fuel for Spaceships’ Propulsion on the Moon with CubeSat. Aerospace 2021, 8, 186. [Google Scholar] [CrossRef]
- Biver, N.; Lecacheux, A.; Encrenaz, T.; Lellouch, E.; Baron, P.; Crovisier, J.; Frisk, U.; Hjalmarson, Å.; Olberg, M.; Sandqvist, A.; et al. Wide-band observations of the 557 GHz water line in Mars with Odin. Astron. Astrophys.-AA 2005, 435, 765–772. [Google Scholar] [CrossRef]
- Eliza, S.; Glenn, Z. The Coming the Moon rush: Technology, billionaires, and Geopolitics will all help get us back to the Moon, but they will not be enough to let us live there indefinitely. IEEE Spectr. 2019, 56, 22–25. [Google Scholar]
- Liu, L.; Weng, C.; Li, S.; Husi, L.; Hu, S.; Dong, P. Passive Remote Sensing of Ice Cloud Properties at Terahertz Wavelengths Based on Genetic Algorithm. MDPI Remote Sens. 2021, 13, 735. [Google Scholar] [CrossRef]
- Jingle, L.; Jianming, D.; See, L.C.; Zhang, X.C. Broadband terahertz wave remote sensing using coherent manipulation of fluorescence from asymmetrically ionized gases. Nat. Photonics 2010, 4, 627–631. [Google Scholar] [CrossRef]
- Brown, E.R. Fundamentals of Terrestrial Millimeter-Wave and THz Remote Sensing. Int. J. High Speed Electron. Syst. 2003, 13, 995–1097. [Google Scholar] [CrossRef]
- Jiménez, C.; Buehler, S.A.; Rydberg, B.; Eriksson, P.; Evans, K.F. Performance simulations for a submillimetre-wave satellite instrument to measure cloud ice. Q. J. R. Meteorol. Soc. 2007, 133, 129–149. [Google Scholar] [CrossRef]
- Evans, K.F.; Walter, S.J.; Heymsfield, A.J.; Deeter, M.N. Modeling of Submillimeter Passive Remote Sensing of Cirrus Clouds. J. Appl. Meteorol. 1998, 37, 184–205. [Google Scholar] [CrossRef]
- Evans, K.F.; Stephens, G.L. Microweve Radiative Transfer through Clouds Composed of Realistically Shaped Ice Crystals. Part II. Remote Sensing of Ice Clouds. J. Atmos. Sci. 1995, 52, 2058–2072. [Google Scholar] [CrossRef]
- Buehler, S.A.; Jiménez, C.; Evans, K.F.; Eriksson, P.; Rydberg, B.; Heymsfield, A.J.; Stubenrauch, C.J.; Lohmann, U.; Emde, C.; John, V.O.; et al. A concept for a satellite mission to measure cloud ice water path, ice particle size, and cloud altitude. Q. J. R. Meteorol. Soc. 2007, 133, 109–128. [Google Scholar] [CrossRef]
- Kim, Y.; Reck, T.J.; Nemchick, D.J.; Chattopadhyay, G.; Drouin, B.; Chang, M.-C.F.; Tang, A. A 183-GHz InP/CMOS-Hybrid Heterodyne-Spectrometer for Spaceborne Atmospheric Remote Sensing. IEEE Trans. Terahertz Sci. Technol. 2019, 9, 313–334. [Google Scholar] [CrossRef]
- De Graauw, T.; Helmich, F.P.; Phillips, T.G.; Stutzki, J.; Caux, E.; Whyborn, N.D.; Dieleman, P.; Roelfsema, P.R.; Aarts, H.; Assendorp, R.; et al. The Herschel-heterodyne instrument for the far-infrared. Astron. Astrophys. 2010, 518, L6. [Google Scholar] [CrossRef]
- Mark, B. Mission Design for the Lunar Reconnaissance Orbiter. In Proceedings of the 29th Annual Aas Guidance and Control Conference, Breckenridge, CO, USA, 4–8 February 2006. [Google Scholar]
- Weng, C.; Liu, L.; Gao, T.; Hu, S.; Li, S.; Dou, F.; Shang, J. Multi-Channel Regression Inversion Method for Passive Remote Sensing of Ice Water Path in the Terahertz Band. Atmosphere 2019, 10, 437. [Google Scholar] [CrossRef]
- Bradley, R.J. Subharmonic Mixer in CMOS Microwave Integrated Circuit. Ph.D. Thesis, Queen’s University, Kingston, ON, Canada, 2009. [Google Scholar]
- Zhang, B.; Lv, X.; He, J.; Xing, D.; Fan, Y.; Chen, X. 1.1 THz tenth harmonic mixer based on planar GaAs Schottky diode. Workshop Millim.-Waves Terahertz Technol. 2019, 13, 1799–1803. [Google Scholar] [CrossRef]
- Yang, Y.; Zhang, B.; Zhao, X.; Fan, Y.; Chen, X. 220 GHz wideband integrated receiver front end based on planar Schottky diodes. Microw. Opt. Technol. Lett. 2019, 62, 2737–2746. [Google Scholar] [CrossRef]
- Zhang, B.; Zhang, Y.; Pan, L.; Li, Y.; Cui, J.; Xu, R.; Yan, B. A 560 GHz Sub-harmonic Mixer Using Half-Global Design Method. Electronic 2021, 10, 234. [Google Scholar] [CrossRef]
- Anderberg, M.; Sobis, P.; Drakinskiy, V.; Schleeh, J.; Dejanovic, S.; Emrich, A.; Stake, J. A 183-GHz Schottky Diode Receiver with 4 dB Noise Figure. In Proceedings of the 2019 IEEE MTT-S International Microwave Symposium (IMS), Boston, MA, USA, 2–7 June 2019. [Google Scholar]
- Anderberg, M. Design of a 183-GHz Subharmonic Mixer using Membrane Integrated GaAs Schottky Diode Technology. Ph.D. Thesis, Chalmers University of Technology, Gothenburg, Sweden, 2018. [Google Scholar]
- Maestrini, A.; Tripon-Canseliet, C. A 540–640-GHz High-Efficiency Four-Anode Frequency Tripler. IEEE Trans. Microw. Theory Tech. 2019, 53, 2835–2843. [Google Scholar] [CrossRef]
- Vahid, R.N.; Weidong, H.; Waseem, S.; Muzahir, A. CubeSat-Based Observations of Lunar Ice Water Using a 183 GHz Horn Antenna: Design and Optimization. Appl. Sci. 2023, 13, 9364. [Google Scholar] [CrossRef]
- Wu, C.; Zhang, Y.; Xu, Y.; Bo, Y.; Xu, R. Dual Lumped Ports Technique and Its Applications in Modeling of Planar Schottky Diode in THz Band. IEEE Access 2020, 9, 38001–38009. [Google Scholar] [CrossRef]
- Guo, J.; Cheng, H.; Xu, J.; Qian, C. Design of a full W-band detector based on Schottky diode with quartez substrate. IET Microw. Prophage. 2019, 13, 936–941. [Google Scholar] [CrossRef]
- Lin, P.; Fang, X.; Zhang, L. Design and Optimization of Half-Waveguide Transitions for Millimeter-Wave Applications. IEEE Trans. Compon. Packag. Manuf. Technol. 2019, 9, 2209–2216. [Google Scholar]
- Ji, G.; Zhang, D.; Meng, J.; Liu, S.; Yao, C. Design and Measurement of a 0.67 THz Biased Sub-Harmonic Mixer. Electronic 2020, 9, 161. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, B.; Feng, Y.; Lv, X.; Ji, D.; Niu, Z.; Yang, Y.; Zhao, X.; Fan, Y. Development of 340-GHz Transceiver Front end based on GaAs Monolithic Integration Technology for THz Active Imaging Array. Appl. Sci. 2020, 10, 7924. [Google Scholar] [CrossRef]
- Bertrand, T.; Alain, M.; John, W.; Erich, S.; Goutam, C.; John, G.; Choonsup, L.; Robert, L.; Imran, M. Terahertz cooled sub-harmonic schottky mixer for planetary atmospheres. In Proceedings of the 5th ESA Workshop on Millimeter Wave Technology and Application & 31st ESA antenna Workshop, Noordwijk, The Netherlands, 18–20 September 2019. [Google Scholar]
- Jose, M.; Perez, E.; Carlos, Q.; Ramon, G.; Inigo, E. Design of 300 GHz combined doubler/subharmonic mixer based on schottky diodes with integrated MMIC based local oscillator. Electronic 2020, 9, 2112. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | BOL | EOL | ||
|---|---|---|---|---|
| Fluence @ 1MeV [e/sq cm] | 0 | 2.50 × 1014 | 5.00 × 1014 | 1.00 × 1015 |
| Estimated Pmp | 1.00 | 0.97 | 0.94 | 0.90 |
| Voc [V] | 18.83 | 18.24 | 17.88 | 17.58 |
| Isc [A] | 0.52 | 0.52 | 0.51 | 0.50 |
| Vmp [V] | 16.86 | 16.40 | 16.02 | 15.71 |
| Imp [A] | 0.5 | 0.502 | 0.499 | 0.485 |
| Pmp [W] | 8.48 | 8.23 | 7.99 | 7.62 |
| Solar Panel Type | Estimation of Power (W) |
|---|---|
| Solar panel A | 3.6 |
| Solar panel BR | 7.4 |
| Total solar panels | 48 |
| Solar Panel Type | Estimation of Power (W) |
|---|---|
| Solar panel A | 3.6 |
| Solar panel AR/AL | 3.6 |
| Total solar panels | 10.8 |
| Modes | Active Subsystems | Power Usage (W) |
|---|---|---|
| Recovery | MCU, EPS, star tracker, thruster | 21.6 |
| Normal | MCU, EPS, TTC RX | 1.140 |
| ADCS | MCU, thruster, star tracker, EPS, reaction wheels | 29.6 |
| Payload | FTS, MCU, EPS, reaction wheels, star tracker | 29 |
| Com | MCU, EPS, TX | 6 |
| Critical | MCU (LOW power), EPS | 0.5 |
| Safe | MCU, EPS | 0.9 |
| Peak power usage | 29.6 | |
| Margin | 18.4 |
| Modes | Active Subsystems | Power Usage (W) |
|---|---|---|
| Recovery | MCU, EPS, star tracker, thruster | 21.6 |
| Normal | MCU, EPS, TTC RX | 1.140 |
| ADCS | MCU, thruster, star tracker, EPS, reaction wheels | 29.6 |
| Payload | Camera, MCU, EPS, reaction wheels, star tracker | 18.5 |
| Com | MCU, EPS, TX | 6 |
| Critical | MCU (LOW power), EPS | 0.5 |
| Safe | MCU, EPS | 0.9 |
| Peak power usage | 29.6 | |
| Margin | 18.4 |
| Modes | Active Subsystems | Power Usage (W) |
|---|---|---|
| Recovery | MCU, EPS, star tracker, thruster | 21.6 |
| Normal | MCU, EPS, TTC RX | 1.140 |
| ADCS | MCU, thruster, star tracker, EPS, reaction wheels | 29.6 |
| Payload | Spectrometer, MCU, EPS, reaction wheels, star tracker | 14.8 |
| Com | MCU, EPS, TX | 6 |
| Critical | MCU(LOW power),EPS | 0.5 |
| Safe | MCU, EPS | 0.9 |
| Peak power usage | 29.6 | |
| Margin | 18.4 |
| Modes | Active Subsystems | Power Usage (W) |
|---|---|---|
| Safe | OBDH, ADCS, MCU, ADCS sensors | 1.616 |
| Recovery | OBDH, ADCS, MCU, ADCS sensors, thruster | 2 |
| Normal | OBDH, ADCS, MCU, ADCS sensors, UHF RX/TX | 2.16 |
| Communication | OBDH, ADCS, MCU, ADCS sensors, S-band, thruster | 2.276 |
| Payload | OBDH, ADCS, MCU, ADCS sensors, THz | 5 |
| Peak power usage | 5 | |
| Margin | 3 |
| Future | Quantity |
|---|---|
| Total transmitter power | 38.45 dBm |
| Transmitter circuit losses | −0.25 dB |
| MarVen antenna gain | 29.2 dBi |
| Antenna pointing loss | −0.1 dB |
| EIRP | 67.3 dBm |
| Path loss (Mars to Earth) | −279.33 dB |
| Atmospheric attenuation | −0.14 dB |
| DSN parameter | |
| Polarization losses | −0.3 dB |
| Antenna pointing loss | −0.3 dB |
| DSN (DSS 14) antenna gain | 74.28 dB |
| DSN circuit loss | −1.79 |
| SNT (system noise temperature) | 18.39 K |
| SNT due to elevation | 5.023 K |
| SNT due to atmospheric | 8.6 K |
| SNT due to Sun | 0.00 K |
| SNT due to hot body | 0.00 K |
| Total system noise temperature | 32.01 K |
| Noise spectral density | −183.55 dBm/Hz |
| 43.19 dB-Hz | |
| Threshold | 38.3 dB-Hz |
| Margin | 4.89 |
| Name, Ref. [70] | Tmax (mN) | me (kg) | Isp (s) | Pmax (kW) | η (%) |
|---|---|---|---|---|---|
| Ion Engines | |||||
| NSTAR | 92.7 | 8.20 | 2500 | 2.325 | 61.8 |
| DERA T6 | 150.0 | 6.20 | 3470 | 3.900 | 65.0 |
| 25 cm XIPS Hughes | 165.0 | NA | 3500 | 4.500 | 65.0 |
| NASA 30 cm | 178.0 | 7.00 | 3610 | 4.880 | 67.0 |
| RIT-XT | 210.0 | NA | 4448 | 6.850 | 75.5 |
| NEXT | 238.0 | 12.7 | 4070 | 6.860 | 59.0 |
| RIT-22 | 250.0 | 7.00 | 6400 | 5.0 | NA |
| HiPER DS3G | 450.0 | NA | 10,000 | 25.0 | NA |
| NEXIS | 470.0 | 28.70 | 8500 | 25.0 | 78.0 |
| Prior Thruster | 500.0 | 20.0 | 2000 | NA | NA |
| HiPEP | 670.0 | 46.50 | 9620 | 39.300 | 80.0 |
| Hall-Effect Thrusters | |||||
| BHT-1500 | 102.0 | NA | 1820 | 1.7 | 54.6 |
| Thales HEMP | 152.0 | 6.0 | 3500 | 3.0 | 58.0 |
| P5 | 246.0 | NA | 2326 | 5.0 | NA |
| DS-HET | 300.0 | 12.0 | 3000 | 5.0 | 50.0 |
| SPT-140 | 300.0 | NA | 1750 | 5.0 | 55.0 |
| T-140 | 300.0 | NA | 2000 | 4.5 | NA |
| PPSX000 | 340.0 | NA | 2480 | 6.0 | NA |
| NASA-137Mv2 | 342.0 | NA | 3000 | 7.872 | 59.6 |
| SPT-160 | 400.0 | NA | 2500 | 4.5 | 60.0 |
| SPT-200 | 498.0 | NA | 2250 | 11.0 | 63.0 |
| BHT-8000 | 512.0 | 20.0 | 1900 | 8.0 | 60.0 |
| T-220 | 1000.0 | NA | 1950 | 20.0 | 62.0 |
| PPS-20k ML | 1050.0 | 25.0 | 2500 | 22.4 | 60.0 |
| SPT-290 | 1500.0 | 23.0 | 3300 | 30.0 | 70.0 |
| Parameter | Optimal Solution |
|---|---|
| Initial time, (TDB; JD) | 10 April 2024; 2460410.5 |
| Time of flight (days) | 348 |
| Final time, (TDB; JD) | 24 March 2025; 52460758.5 |
| (km) | [−1.41697171828695 × 108, −5.24872600577300 × 107, 3.41954334262199 × 104] |
| (km/s) | [9.858836758211465 × 100, −2.807567589144283 × 101, 2.475556862844286 × 10−4] |
| (km) | [−2.062255095916851 × 108 1.393403861898105 × 108, 7.999954257281169 × 106] |
| (km/s) | [−1.27286229760030 × 101, −1.795386400481246 × 101, −6.391620818469512 × 10−2] |
| (kg) | 120 |
| (s) | 6400 |
| (mN) | 250 |
| Subsystem | Quantity | Mass (gr) |
|---|---|---|
| TTC | ||
| X-band | 1 | 3000 |
| UHF-band | 1 | 75 |
| OBDH | ||
| MCU 1Aeroflex GR712 ADCS | 1 | 94 |
| MCU 2 | 1 | 196 |
| Payload | ||
| THz radiometer | 1 | 1000 |
| Camera | 1 | 250 |
| 6U CubeSat | 3 | 6U CubeSat with FTS payload = 8951 6U CubeSat with HyperScape spectrometer payload = 6664 6U CubeSat with camera payload = 6664 |
| 3U CubeSat | 2 | 3U CubeSat with THz payload = 2qtyx2761 |
| P-PODs | 3x6U 2x3U | 3 × 12,000 |
| EPS | ||
| 6U solar cells | 8 | 8 × 300 |
| Batteries and hardware | 1 | 722 |
| ADCS | ||
| Reaction wheels, IMU sensors | 1 | 6000 |
| DARE T6 Ion thruster | 1 | 7000 |
| Fuel back capacity | 17,000 | |
| Reserved fuel for pioneering missions | 7000 | |
| STR and TCS | ||
| Structure | 10,000 | |
| Thermal control | 4350 | |
| Total | 120,000 |
| Characteristics | Value |
|---|---|
| Mass | 5 kg |
| Power | 20 W (peak) |
| Volume | 22.6 × 10 × 17 cm |
| Scanning | ±26º Uni-directional cross track |
| Pointing | Nadir |
| Thermal | Deployable Earth shield |
| Subsystems | Mass (gr) | Size | Power Usage (mW) |
|---|---|---|---|
| MCU (ARM based) | 94 | 9.8 × 9.8 × 1 | 400 |
| UHF TX/RX | 100 | 9.8 × 9.8 × 1 | TX >> 5100 RX >> 240 |
| Antenna | 150 | ||
| Star tracker | 50 | 3 × 3 × 5 | 100 |
| Battery and hardware | 250 | 8.9 × 9.5 × 7 | 500 |
| Solar cells | 6 × 300 2 × 150 | 6U 3U | |
| Thruster | 500 | 6.4 × 9 × 9 | 21,000 |
| FTS | 5000 | 22.6 × 10 × 17 | 20,000 |
| Reaction wheels | 520 | 1U | 8000 |
| Structure | 1100 | 6U | 0 |
| MLI | 200 | 6U | 0 |
| Total | 8951 |
| Parameters | Value |
|---|---|
| Spatial resolution (GSD) at 500 km | PAN 10 m; MS 20 m |
| Swath at 500 km | 40 km |
| Mass (including electronics) | 1.6 kg |
| Spectral bands | 7 × MS |
| Satellite bus size | Compatible with 3U or 6U |
| Physical size | 2U (10 cm × 10 cm × 20 cm excl. electronics) (10 cm × 10 cm × 21.5 cm with rear-mounted CU) |
| Data interface | LVDS, SPI, I2C, CAN, RS422 |
| Power usage | imaging mode: <10 W; readout mode: <5 W |
| Subsystems | Mass (gr) | Size | Power Usage (mW) |
|---|---|---|---|
| MCU | 94 | 9.8 × 9.8 × 1 | 400 |
| UHF TX/RX | 100 | 9.8 × 9.8 × 1 | TX >> 5100 RX >> 240 |
| Antenna | 150 | ||
| Star tracker | 50 | 3 × 3 × 5 | 100 |
| Battery and hardware | 250 | 1U | 500 |
| Solar cells | 6 × 300 2 × 150 | 6U 3U | |
| Thruster | 500 | 6.4 × 9 × 9 | 21,000 |
| Camera | 1600 | 2U | 10,000 |
| Reaction wheels | 520 | 1U | 8000 |
| Structure | 1100 | 6U | 0 |
| MLI | 200 | 6U | 0 |
| Total | 6664 |
| Parameter | Value |
|---|---|
| Focal length | 580 mm ± 1 mm |
| Aperture | 95 mm |
| Full field of view | 2.22° (across-track) |
| Sensor technology | CMOS Global Shutter |
| Resolution | 4096 pixels |
| Pixel size | 5.5 µm |
| Pixel depth | 10-bit |
| Spectral bands | Up to 32 bands user selectable |
| Spectral range | 442 nm to 884 nm |
| Control interface options | I2 C |
| Power consumption | 2.5 W |
| Mass | 1.1 ± 5% |
| Dimensions | 98 × 98 × 176 mm |
| Item | Mass (gr) | Quantity |
|---|---|---|
| Thruster | 500 | 1 |
| 3U solar cells | 150 | 3 |
| 20 Whr battery and hardware | 350 | 1 |
| Main MCU | 100 | 1 |
| UHF transceiver | 75 | 1 |
| UHF ant | 50 | 1 |
| S-band transceiver | 132 | 1 |
| S-band ant | 75 | 2 |
| Star tracker | 250 | 1 |
| Star tracker | 250 | 1 |
| Structure | 304 | 1 |
| THz payload | 400 | 1 |
| Total mass | 2761 | |
| Margin | 239 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rastinasab, V.; Hu, W.; Saghamanesh, M.; Kerrouche, K.D.E.; Tahmasebi, M.K. MeSat Mission: Exploring Martian Environment with THz Radiometer Payload and Optimal Trajectory. Remote Sens. 2024, 16, 1893. https://doi.org/10.3390/rs16111893
Rastinasab V, Hu W, Saghamanesh M, Kerrouche KDE, Tahmasebi MK. MeSat Mission: Exploring Martian Environment with THz Radiometer Payload and Optimal Trajectory. Remote Sensing. 2024; 16(11):1893. https://doi.org/10.3390/rs16111893
Chicago/Turabian StyleRastinasab, Vahid, Weidong Hu, Mohammadreza Saghamanesh, Kamel Djamel Eddine Kerrouche, and Mohammad Kazem Tahmasebi. 2024. "MeSat Mission: Exploring Martian Environment with THz Radiometer Payload and Optimal Trajectory" Remote Sensing 16, no. 11: 1893. https://doi.org/10.3390/rs16111893
APA StyleRastinasab, V., Hu, W., Saghamanesh, M., Kerrouche, K. D. E., & Tahmasebi, M. K. (2024). MeSat Mission: Exploring Martian Environment with THz Radiometer Payload and Optimal Trajectory. Remote Sensing, 16(11), 1893. https://doi.org/10.3390/rs16111893