

A Lidar Biomass Index of Tidal Marshes from Drone Lidar Point Cloud


Abstract
1. Introduction
2. Study Area and Methods
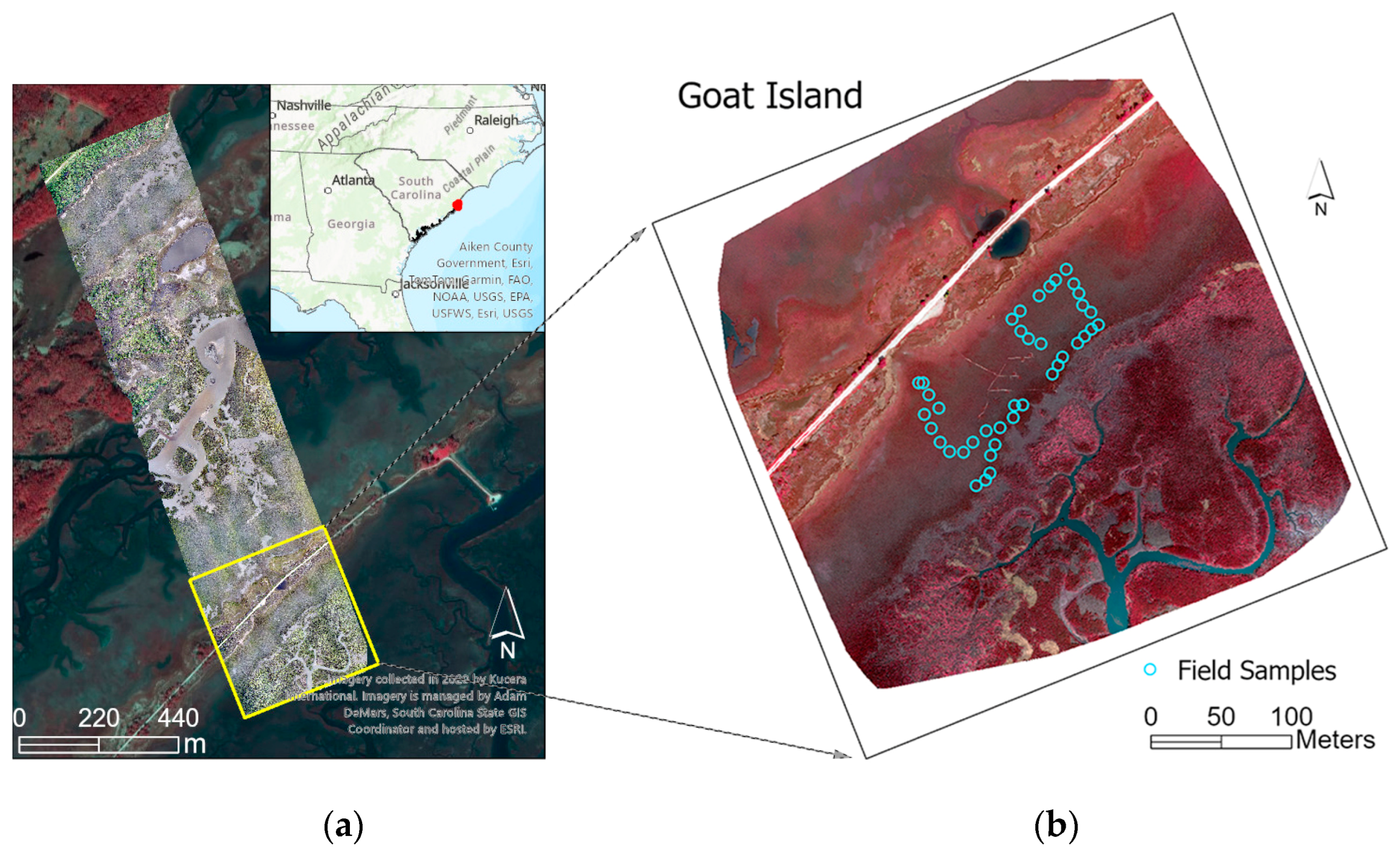
2.1. Study Area and Field Experiments
2.2. Previous Work
2.3. Approaches
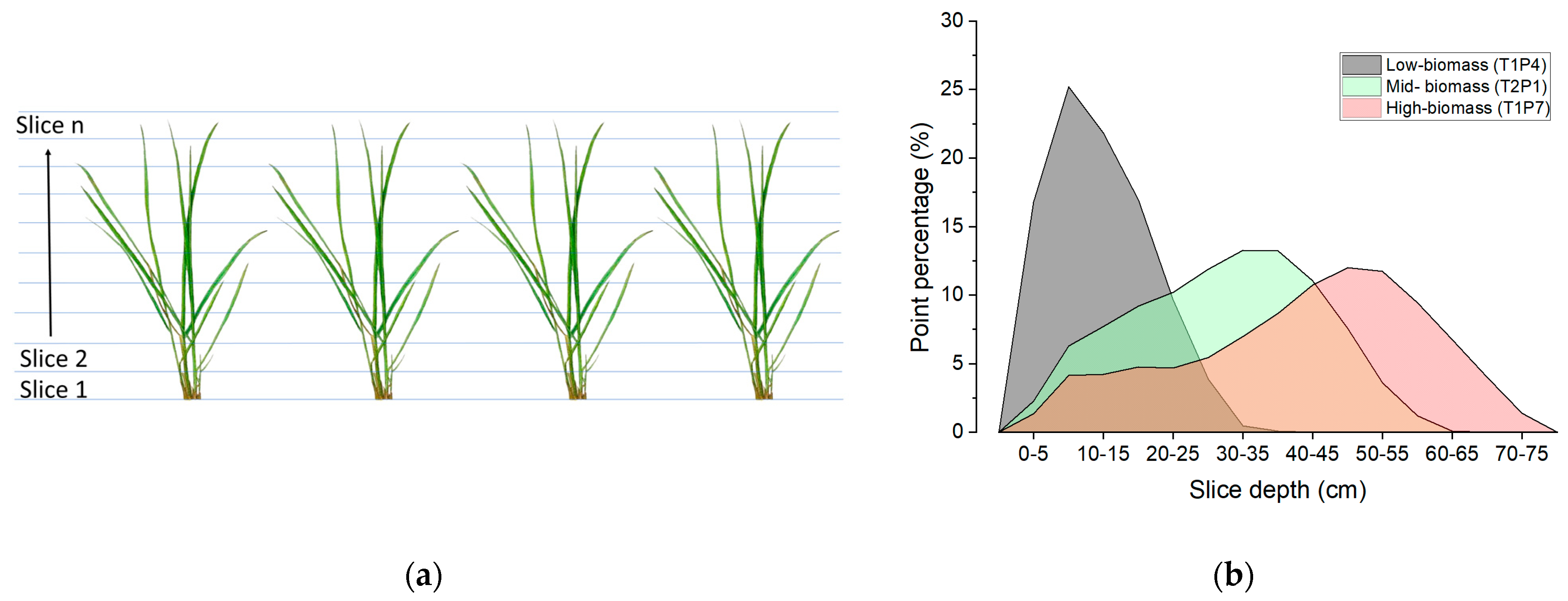
2.3.1. Extracting Plant Structures from Lidar Point Cloud
2.3.2. A Profile Area-Weighted Height
2.3.3. Lidar Biomass Index (Lidar_BI)
3. Results and Discussion
3.1. Classified Point Cloud and Marsh Characteristics
3.2. Lidar-Extracted Marsh Heights and Densities
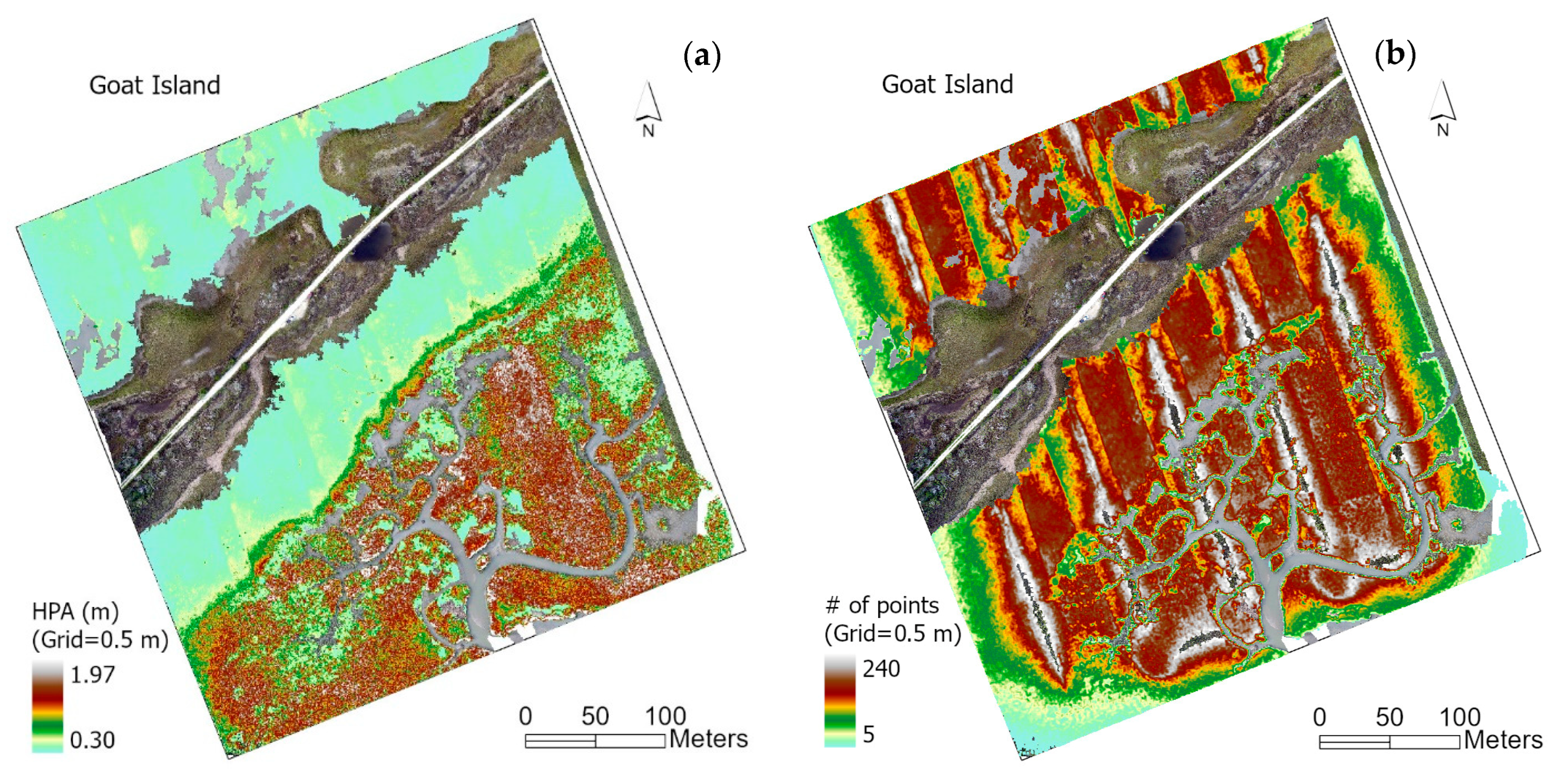
3.2.1. The Maximal Marsh Height () and Total Point Density
3.2.2. Profile Area-Weighted Height () and Vegetation Point Density (Nveg)
3.3. Lidar-Extracted Marsh Biomass Index and Comparison with the Spectral Method
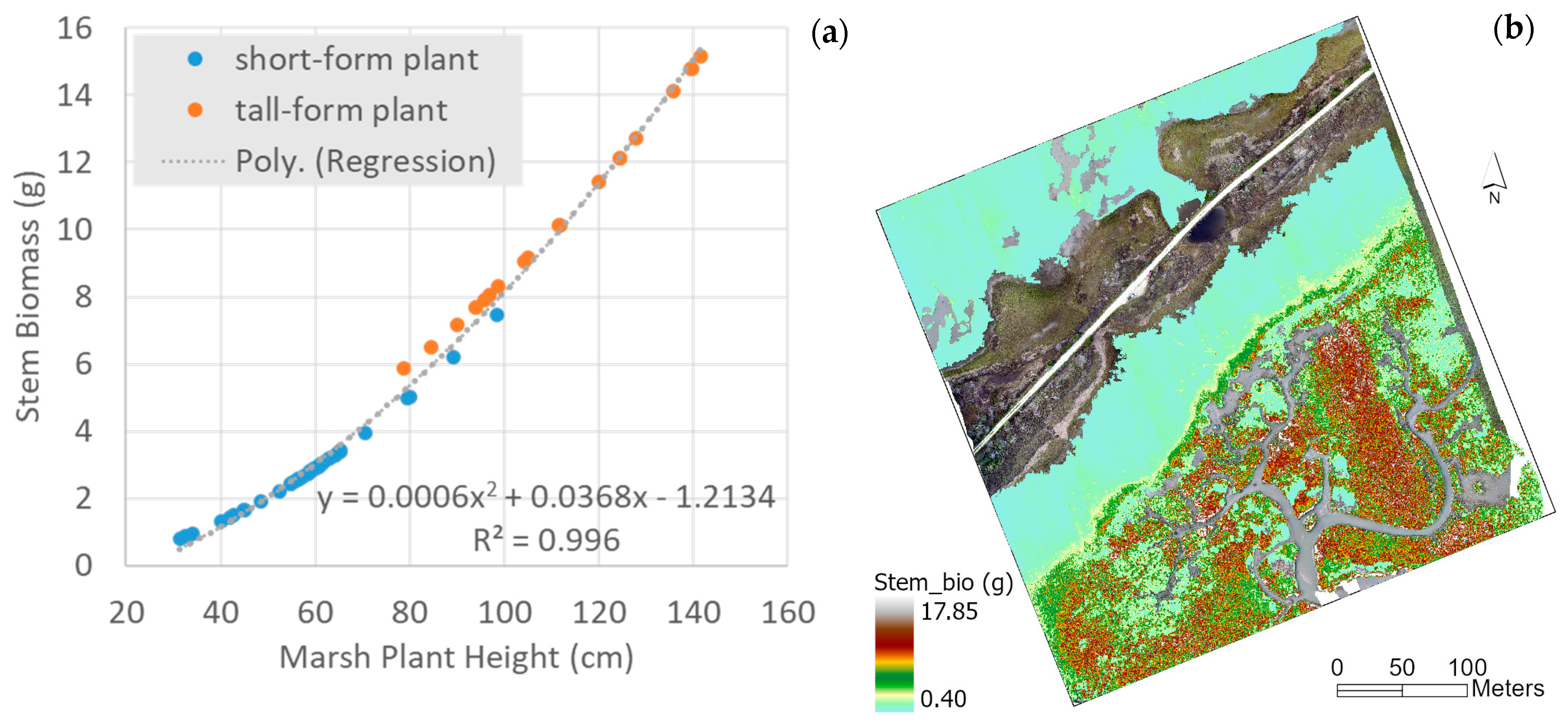
3.3.1. Plant-Level Stem Biomass ()
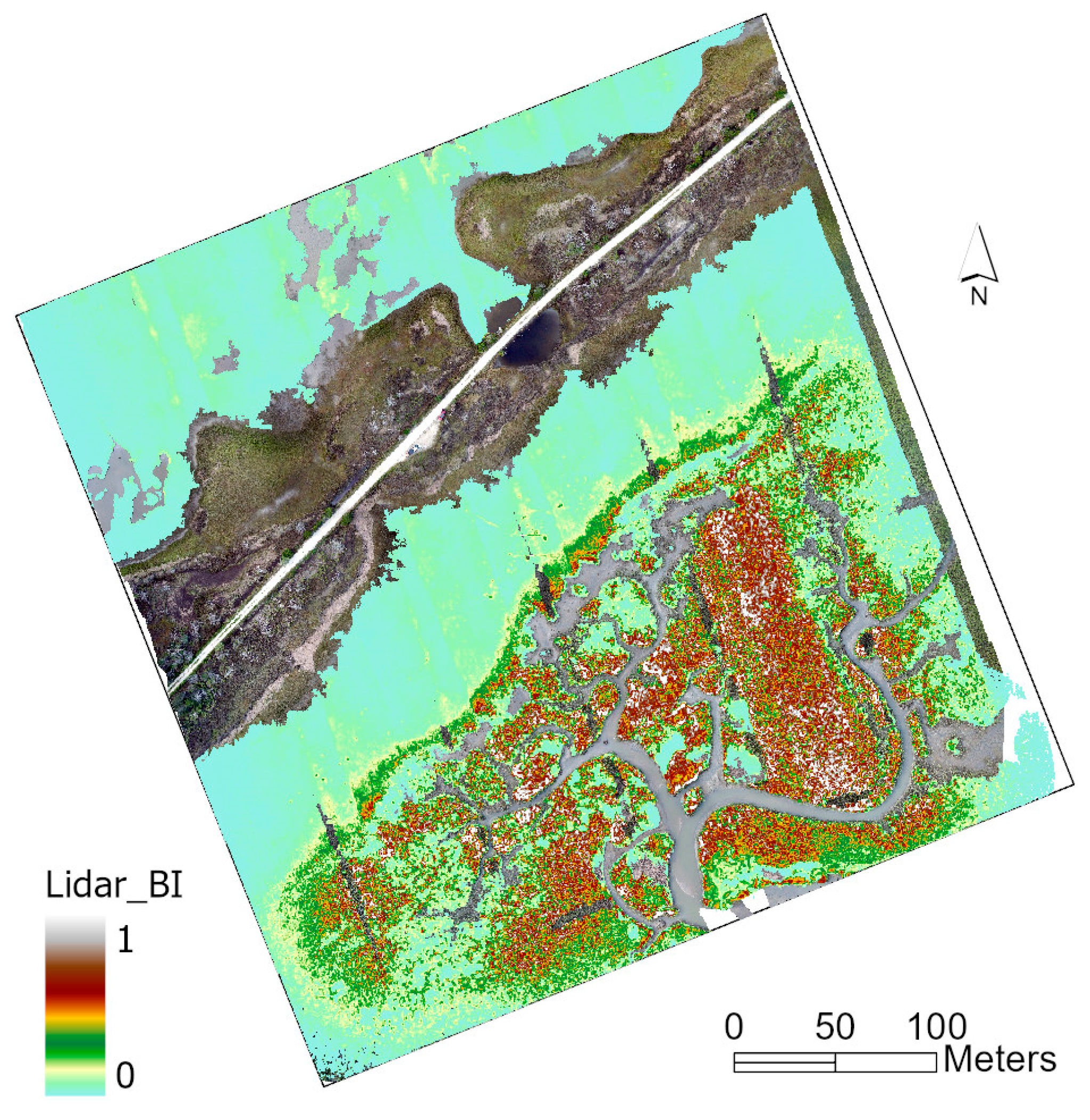
3.3.2. Lidar Biomass Index (Lidar_BI)
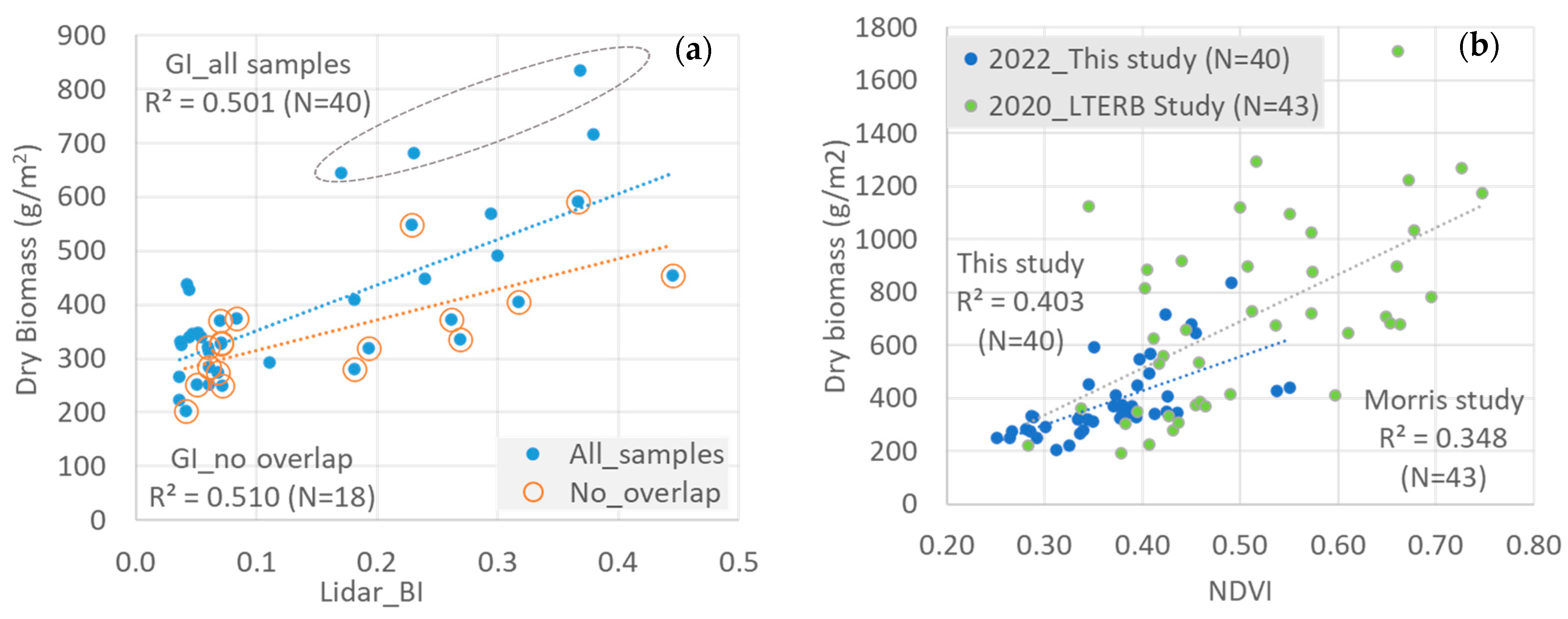
3.3.3. Comparison between the Lidar_BI and the NDVI Methods for Biomass Estimation
3.4. Drone Lidar for 3D Marsh Mapping: Pros and Cons
4. Conclusions
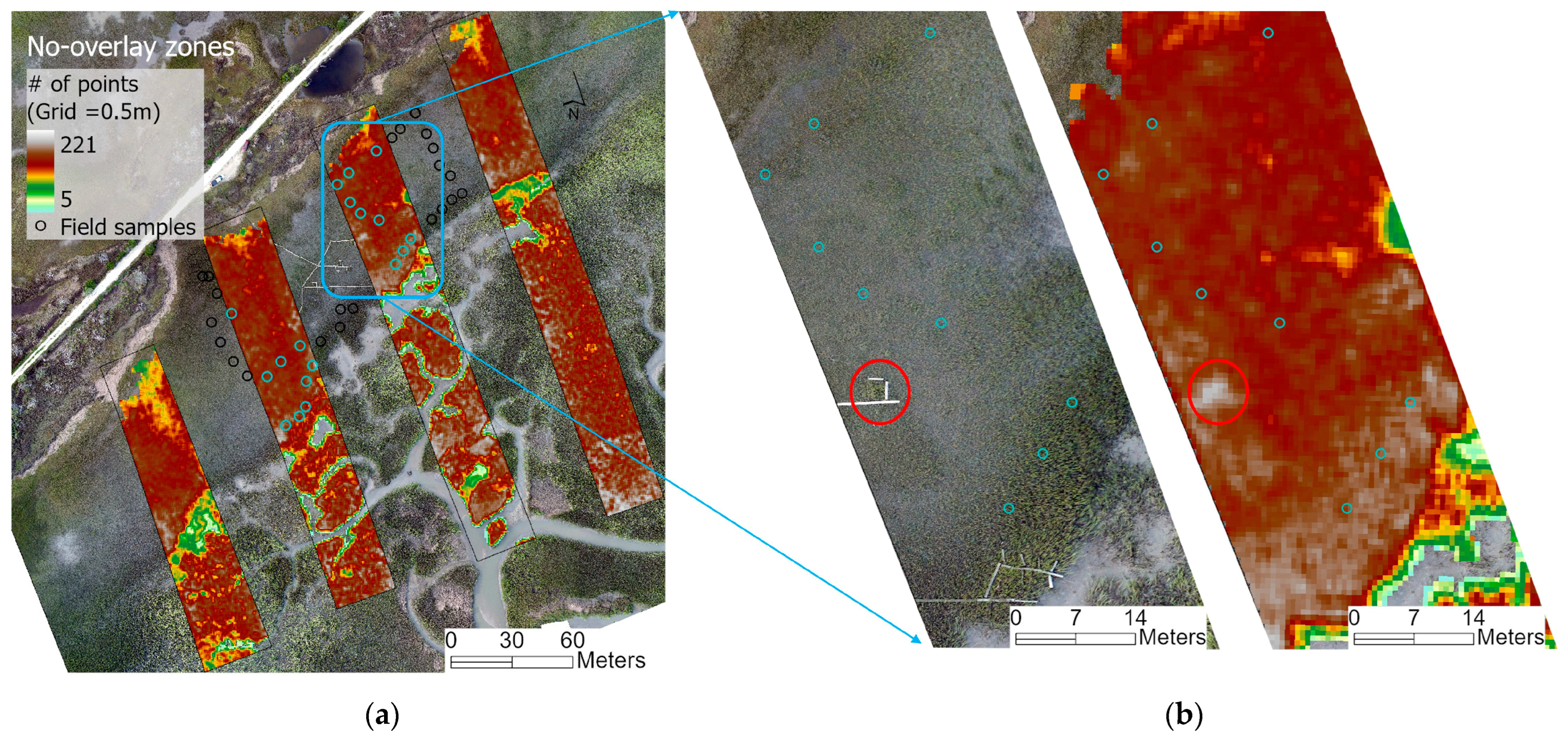
- Similar to airborne Lidar systems, drone Lidar point cloud is characterized by single returns in tidal marshes.
- The HPA better describes the biophysical properties of marsh fields than the maximal marsh height extracted from the topmost Lidar points.
- The semi-allometric ratio index, Lidar_BI, represents relative marsh biomass in a spatial dimension. For quantitative biomass estimation, it achieves a comparable and slightly better performance (R2 = 0.5) than the commonly applied vegetation index approach.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sanger, D.; Parker, C. Guide to the Salt Marshes and Tidal Creeks of the Southeastern United States; South Carolina Department of Natural Resources: Barnwell, SC, USA, 2016; 112p.
- Sweet, W.V.; Hamlington, B.D.; Kopp, R.E.; Weaver, C.P.; Barnard, P.L.; Bekaert, D.; Brooks, W.; Craghan, M.; Dusek, G.; Frederikse, T.; et al. Global and Regional Sea Level Rise Scenarios for the United States: Updated Mean Projections and Extreme Water Level Probabilities Along U.S. Coastlines; NOAA Technical Report NOS 01; NOAA National Ocean Service: Silver Spring, MD, USA, 2022; 111p.
- Fagherazzi, S.; Kirwan, M.L.; Mudd, S.M.; Guntenspergen, G.R.; Temmerman, S.; D’Alpaos, A.; Van De Koppel, J.; Rybczyk, J.M.; Reyes, E.; Craft, C.; et al. Numerical models of salt marsh evolution: Ecological, geomorphic and climatic factors. Rev. Geophys. 2011, 50, RG1002. [Google Scholar] [CrossRef]
- Reutebuch, S.E.; Andersen, H.E.; McGaughey, R.J. Light detection and ranging (lidar): An emerging tool for multiple resource inventory. J. For. 2005, 103, 286–292. [Google Scholar] [CrossRef]
- Schmid, K.A.; Hadley, B.C.; Wijekoon, N. Vertical accuracy and use of topographic Lidar data in coastal marshes. J. Coast. Res. 2011, 27, 116–132. [Google Scholar] [CrossRef]
- Hladik, C.; Alber, M. Accuracy assessment and correction of a Lidar-derived salt marsh digital elevation model. Remote Sens. Environ. 2012, 121, 224–235. [Google Scholar] [CrossRef]
- Amante, C. Estimating coastal digital elevation model uncertainty. J. Coast. Res. 2018, 34, 1382–1397. [Google Scholar] [CrossRef]
- Medeiros, S.C.; Bobinsky, J.S.; Abdelwahab, K. Locality of topographic ground truth data for salt marsh Lidar DEM elevation bias mitigation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 5766–5775. [Google Scholar] [CrossRef]
- Fernandez-Nunez, M.; Burningham, H.; Ojeda Zujar, J. Improving accuracy of Lidar-derived terrain models for saltmarsh management. J. Coast Conserv. 2017, 21, 209–222. [Google Scholar] [CrossRef]
- Pinton, D.; Canestrelli, A.; Wilkinson, B.; Ifju, P.; Ortega, A. A new algorithm for estimating ground elevation and vegetation characteristics in coastal salt marshes from high-resolution UAV-based Lidar point clouds. Earth Surf. Process. Landf. 2020, 45, 3687–3701. [Google Scholar] [CrossRef]
- Blount, T.; Silvestri, S.; Marani, M.; D’Alpaos, A. Lidar derived salt marsh topography and biomass: Defining accuracy and spatial patterns of uncertainty. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2023, 48, 57–62. [Google Scholar] [CrossRef]
- Wang, C.; Morgan, G.R.; Morris, J.T. Drone Lidar deep learning for fine-scale bare earth surface and 3D marsh mapping in intertidal estuaries. Sustainability 2023, 15, 15823. [Google Scholar] [CrossRef]
- Pinton, D.; Canestrelli, A.; Wilkinson, B.; Ifju, P.; Ortega, A. Estimating ground elevation and vegetation characteristics in coastal salt marshes using UAV-based Lidar and digital aerial photogrammetry. Remote Sens. 2021, 13, 4506. [Google Scholar] [CrossRef]
- Allen, D.M.; Allen, W.B.; Feller, R.F.; Plunket, J.S. (Eds.) Site Profile of the North Inlet-Winyah Bay National Estuarine Research Reserve; North Inlet-Winyah Bay National Estuarine Research Reserve: Georgetown, SC, USA, 2014; 432p. [Google Scholar]
- Pennings, S.C.; Bertness, M.D. Salt marsh communities. In Marine Community Ecology; Bertness, M.D., Gaines, S.D., Hay, M.E., Eds.; Sinauer Associates: Sunderland, MA, USA, 2001; pp. 289–316. [Google Scholar]
- Morris, J.; Sundberg, K. LTREB: Aboveground Biomass, Plant Density, Annual Aboveground Productivity, and Plant Heights in Control and Fertilized Plots in a Spartina Alterniflora-Dominated Salt Marsh, North Inlet, Georgetown, SC: 1984–2020; Ver 5; Environmental Data Initiative: Albuquerque, NM, USA, 2021. [Google Scholar] [CrossRef]
- Miller, G.J.; Morris, J.T.; Wang, C. Estimating Aboveground Biomass and Its Spatial Distribution in Coastal Wetlands Utilizing Planet Multispectral Imagery. Remote Sens. 2019, 11, 2020. [Google Scholar] [CrossRef]
- ESRI 2023. ArcGIS Pro 3.2—Understand Overlap Classification. Available online: https://pro.arcgis.com/en/pro-app/latest/help/analysis/3d-analyst/overlap-workflow.htm (accessed on 16 February 2024).
- Jensen, J.R.; Coombs, C.; Porter, D.; Jones, B.; Schill, S.; White, D. Extraction of smooth cordgrass (spartina alterniflora)biomass and leaf area index parameters from high resolution imagery. Geocarto Int. 1998, 13, 25–34. [Google Scholar] [CrossRef]
- Doughty, C.L.; Cavanaugh, K.C. Mapping Coastal Wetland Biomass from High Resolution Unmanned Aerial Vehicle (UAV) Imagery. Remote Sens. 2019, 11, 540. [Google Scholar] [CrossRef]
- Morris, J.T. Estimating net primary production of salt-marsh macrophytes. In Principles and Standards for Measuring Primary Production; Fahey, T.J., Knapp, A.K., Eds.; Oxford University Press: Oxford, UK, 2007; pp. 106–119. [Google Scholar]
- Schulze, D.; Jensen, K.; Nolte, S. Effects of small-scale patterns of vegetation structure on suspended sediment concentration and sediment deposition in a salt marsh. Estuar. Coast. Shelf Sci. 2022, 278, 108125. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bare-Earth Elevation (m) | Biomass (g/m2) | In-Field Marsh Height (m) | Lidar Marsh Height (m) | Total Point Density (/m2) | |
|---|---|---|---|---|---|
| T1P4 | 0.41 | 274.19 | 0.42 | 0.26 | 656 |
| T2P1 | 0.24 | 335.23 | 0.99 | 0.55 | 704 |
| T1P7 | 0.10 | 591.41 | 1.31 | 0.72 | 596 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, C.; Morris, J.T.; Smith, E.M. A Lidar Biomass Index of Tidal Marshes from Drone Lidar Point Cloud. Remote Sens. 2024, 16, 1823. https://doi.org/10.3390/rs16111823
Wang C, Morris JT, Smith EM. A Lidar Biomass Index of Tidal Marshes from Drone Lidar Point Cloud. Remote Sensing. 2024; 16(11):1823. https://doi.org/10.3390/rs16111823
Chicago/Turabian StyleWang, Cuizhen, James T. Morris, and Erik M. Smith. 2024. "A Lidar Biomass Index of Tidal Marshes from Drone Lidar Point Cloud" Remote Sensing 16, no. 11: 1823. https://doi.org/10.3390/rs16111823
APA StyleWang, C., Morris, J. T., & Smith, E. M. (2024). A Lidar Biomass Index of Tidal Marshes from Drone Lidar Point Cloud. Remote Sensing, 16(11), 1823. https://doi.org/10.3390/rs16111823