

An Evaluation of Optimization Algorithms for the Optimal Selection of GNSS Satellite Subsets

Abstract
1. Introduction
2. GNSS Satellite Constellation Determination
2.1. Weighted Geometric Dilution of Precision (WGDOP)
2.2. Traditional Method (TM)
2.3. Optimization Algorithms
2.3.1. Artificial Bee Colony (ABC)
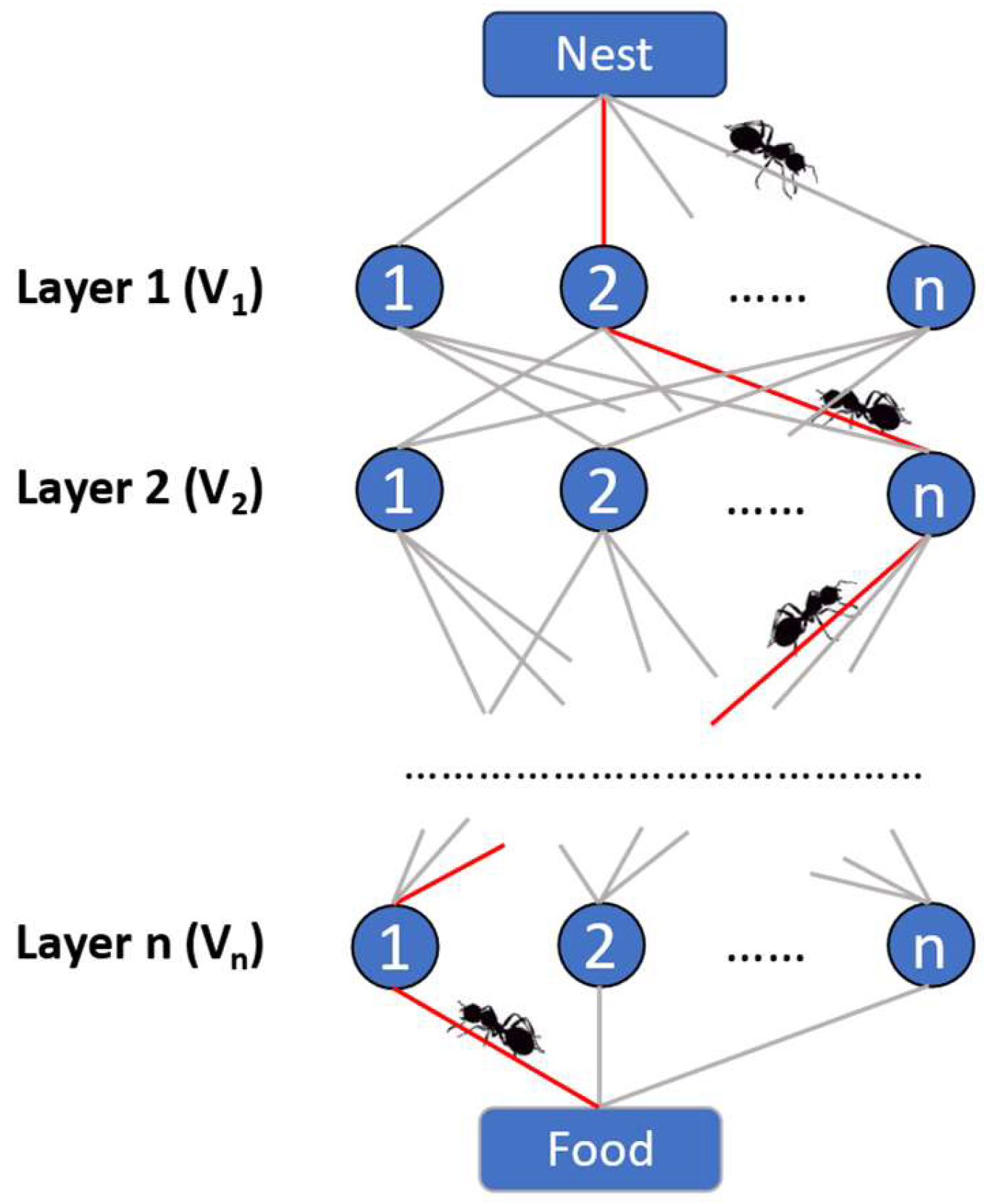
2.3.2. Ant Colony Optimization (ACO)
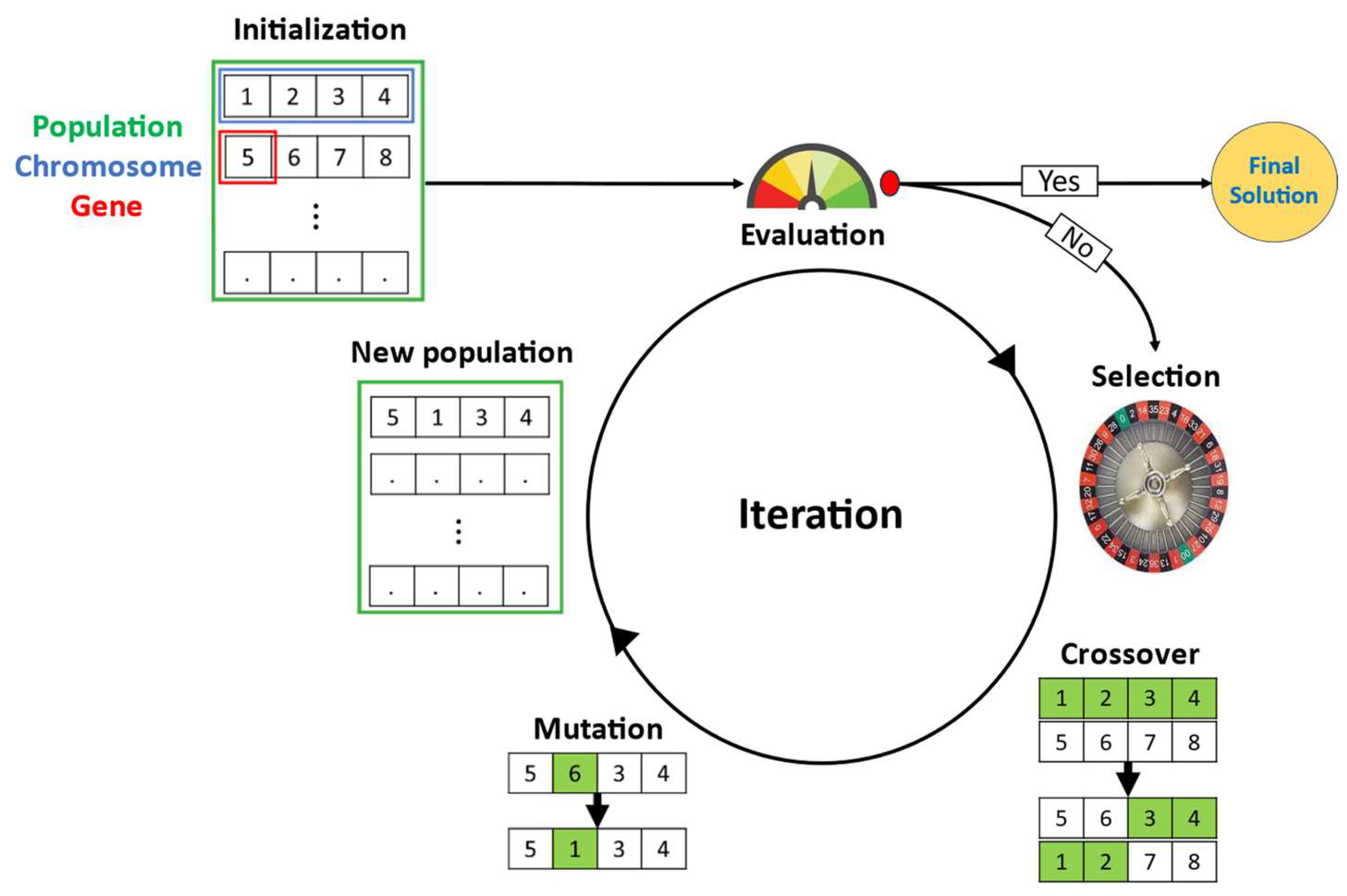
2.3.3. Genetic Algorithm (GA)
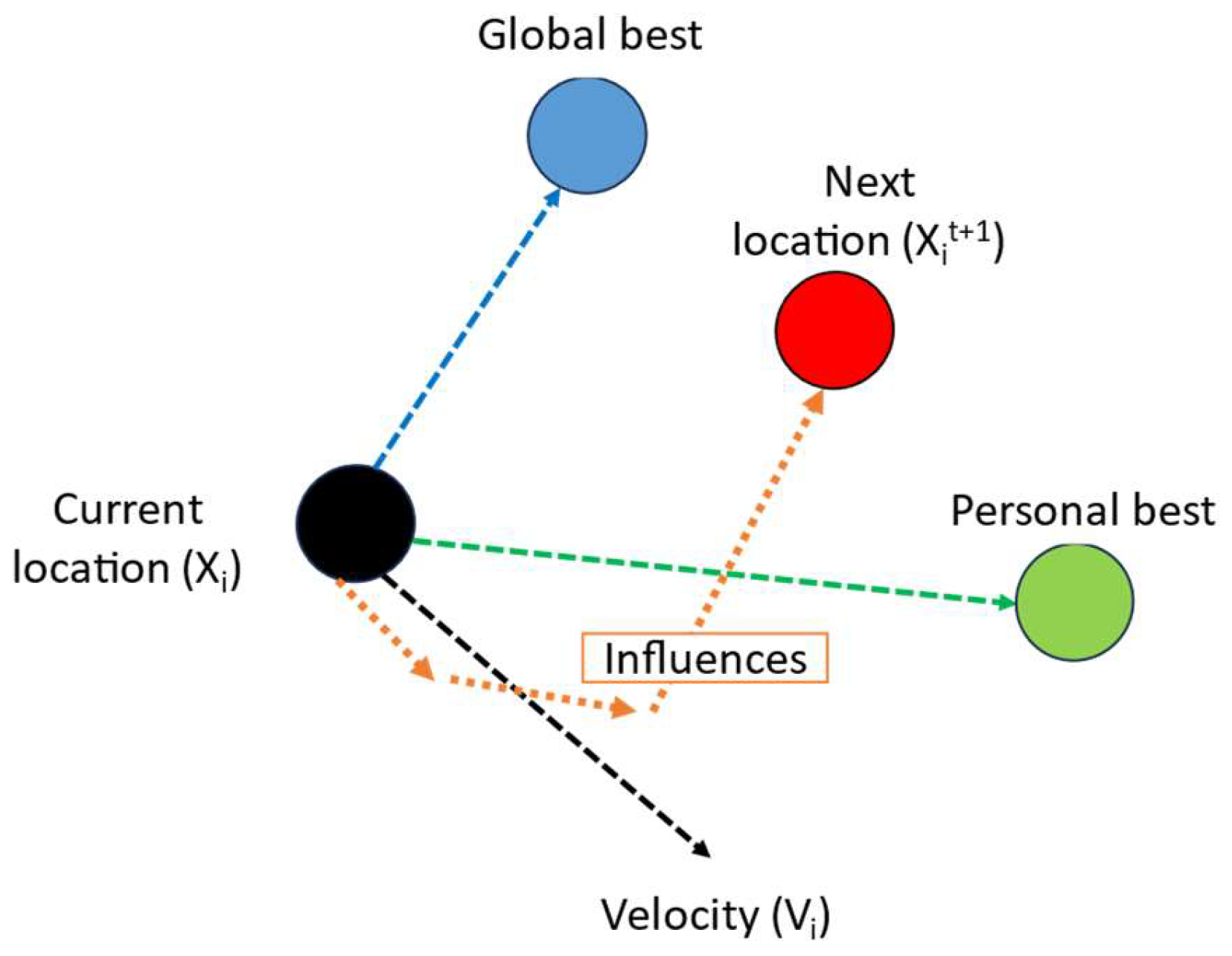
2.3.4. Particle Swarm Optimization (PSO)
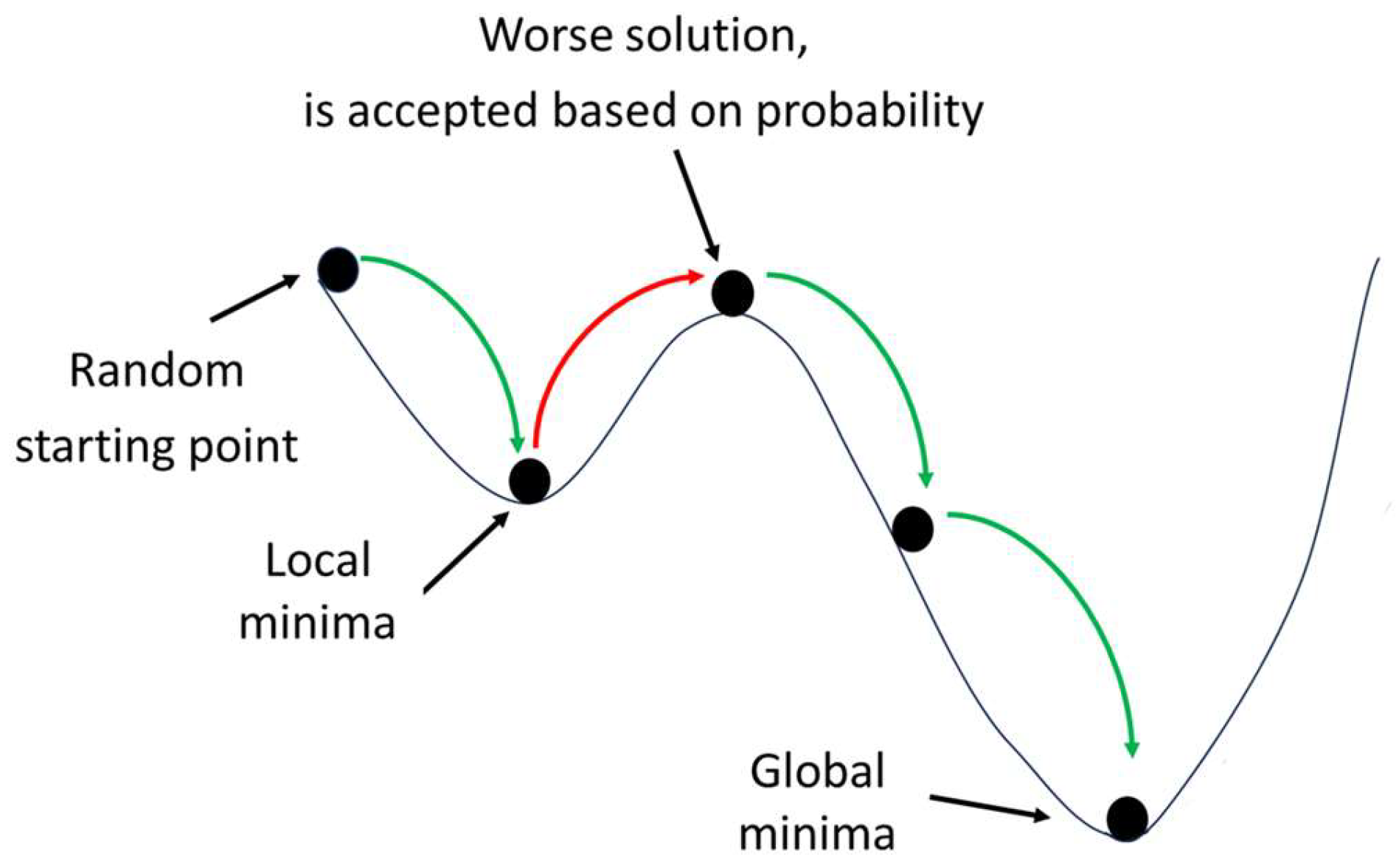
2.3.5. Simulated Annealing (SA)
3. Methodology of Selecting Tracked GNSS Satellites Based on Optimization Algorithms

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Notation | Meaning | Value | References |
|---|---|---|---|---|
| ABC | D | The problem dimensions, indicating the satellite constellation size | ||
| maxIter | The maximum number of iterations | 100 | [26,28,61,62] | |
| pSize | The population size | 100 | [22,26,45,63] | |
| limit | The abandonment limit | D × pSize | [64] | |
| ACO | maxIter | The maximum number of iterations | 100 | |
| pSize | The population size | 100 | ||
| ρ | The evaporation rate | 0.5 | [22,40,45] | |
| α | The relative importance of the trail | 1 | ||
| β | The relative importance of the visibility | 0 | ||
| Q | The quantity of trails laid by ants | 100 | ||
| GA | maxIter | The maximum number of iterations | 100 | |
| pSize | The population size | 100 | ||
| Pc | The probability of crossover | 0.8 | [45,61] | |
| Pm | The probability of mutation | 12 | ||
| PSO | maxIter | The maximum number of iterations | 100 | |
| pSize | The population size | 100 | ||
| Wmax | The initial weights | 0.9 | [45,62,65] | |
| Wmin | The final weights | 0.4 | ||
| C1 | The personal acceleration coefficient | 2 | ||
| C2 | The social acceleration coefficient | 2 | ||
| SA | maxIter | The maximum number of iterations | 1000 | [45,60] |
| pSize | The population size | 1 | ||
| T0 | The initial temperature | 2000 | ||
| Tf | The final temperature | 0.01 | ||
| α | The cooling factor | 0.975 |
4. GNSS Data
5. Results and Discussion
5.1. GPS Optimal Satellites
5.2. Multi-GNSS Optimal Satellites
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- GPS. GOV Space Segment. Available online: https://www.gps.gov/systems/gps/space/ (accessed on 8 January 2024).
- GPS. GOV Other Global Navigation Satellite Systems (GNSS). Available online: https://www.gps.gov/systems/gnss/ (accessed on 8 January 2024).
- Yu, Q.; Wang, Y.; Shen, Y. A Fast GNSS Satellite Selection Algorithm for Continuous Real-Time Positioning. GPS Solut. 2022, 26, 68. [Google Scholar] [CrossRef]
- Zhang, M.; Zhang, J.; Qin, Y. Satellite Selection for Multi-Constellation. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium, Monterey, CA, USA, 5–8 May 2008; pp. 1053–1059. [Google Scholar]
- Xu, B.; Shao, B. Satellite Selection Algorithm for Combined GPS-Galileo Navigation Receiver. In Proceedings of the 2009 4th International Conference on Autonomous Robots and Agents, Wellington, New Zealand, 10–12 February 2009; pp. 149–154. [Google Scholar]
- Nie, Z.; Gao, Y.; Wang, Z.; Ji, S. A New Method for Satellite Selection with Controllable Weighted PDOP Threshold. Surv. Rev.-Dir. Overseas Surv. 2017, 49, 285–293. [Google Scholar] [CrossRef]
- Msaewe, H.A.; Hancock, C.M.; Psimoulis, P.A.; Roberts, G.W.; Bonenberg, L.; de Ligt, H. Investigating Multi-GNSS Performance in the UK and China Based on a Zero-Baseline Measurement Approach. Measurement 2017, 102, 186–199. [Google Scholar] [CrossRef]
- Lau, L.; Tateshita, H.; Sato, K. Impact of Multi-GNSS on Positioning Accuracy and Multipath Errors in High-Precision Single-Epoch Solutions—A Case Study in Ningbo China Real-Time Kinematic (RTK) Global Positioning System (GPS) Carrier Phase-Based Precise Positioning. J. Navig. 2015, 68, 999–1017. [Google Scholar] [CrossRef]
- Takahashi, S.; Kubo, N.; Yamaguchi, N.; Yokoshima, T. Real-Time Monitoring for Structure Deformations Using Hand-Held RTK-GNSS Receivers on the Wall. In Proceedings of the 2017 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017; The Institute of Electrical and Electronics Engineers, Inc. (IEEE): Piscataway, NJ, USA, 2017; p. 1. [Google Scholar]
- Wang, E.; Sun, C.; Guo, J.; Qu, P.; Pang, T.; Zhang, J. GNSS Receiver Satellite Selection Algorithm Based on Particle Swarm Optimization. In Proceedings of the 15th IEEE Conference on Industrial Electronics and Applications (ICIEA), Kristiansand, Norway, 9–13 November 2020; pp. 985–989. [Google Scholar]
- Kiliszek, D.; Kroszczyński, K. Performance of the Precise Point Positioning Method along with the Development of GPS, GLONASS and Galileo Systems. Measurement 2020, 164, 108009. [Google Scholar] [CrossRef]
- Kaloop, M.R.; Yigit, C.O.; El-Mowafy, A.; Bezcioglu, M.; Dindar, A.A.; Hu, J.W. Evaluation of Multi-GNSS High-Rate Relative Positioning for Monitoring Dynamic Structural Movements in the Urban Environment. Geomat. Nat. Hazards Risk 2020, 11, 2239–2262. [Google Scholar] [CrossRef]
- Psimoulis, P.A.; Stiros, S.C. Experimental Assessment of the Accuracy of GPS and RTS for the Determination of the Parameters of Oscillation of Major Structures. Comput.-Aided Civ. Infrastruct. Eng. 2008, 23, 389–403. [Google Scholar] [CrossRef]
- Fang, Y.Y.; Hong, Y.; Zhou, O.G.; Liang, W.; Liu, W. A GNSS Satellite Selection Method Based on SNR Fluctuation in Multipath Environments. Int. J. Control Autom. 2015, 8, 313–324. [Google Scholar] [CrossRef]
- Peppa, I.; Psimoulis, P.; Meng, X. Using the Signal-to-Noise Ratio of GPS Records to Detect Motion of Structures. Struct. Control Health Monit. 2018, 25, e2080. [Google Scholar] [CrossRef]
- Teng, Y.; Wang, J. A Closed-Form Formula to Calculate Geometric Dilution of Precision (GDOP) for Multi-GNSS Constellations. GPS Solut. 2016, 20, 331–339. [Google Scholar] [CrossRef]
- Msaewe, H.A.; Psimoulis, P.A.; Hancock, C.M.; Roberts, G.W.; Bonenberg, L. Monitoring the Response of Severn Suspension Bridge in the United Kingdom Using Multi-GNSS Measurements. Struct. Control Health Monit. 2021, 28, e2830. [Google Scholar] [CrossRef]
- Teng, Y.; Wang, J.; Huang, Q.; Liu, B. New Characteristics of Weighted GDOP in Multi-GNSS Positioning. GPS Solut. 2018, 22, 74. [Google Scholar] [CrossRef]
- Chen, C.-S. Weighted Geometric Dilution of Precision Calculations with Matrix Multiplication. Sensors 2015, 15, 803–817. [Google Scholar] [CrossRef] [PubMed]
- Blanco-delgado, N.; Nunes, F.D. Satellite Selection Based on WDOP Concept and Convex Geometry. In Proceedings of the 2010 5th ESA Workshop on Satellite Navigation Technologies and European Workshop on GNSS Signals and Signal Processing (NAVITEC), Noordwijk, The Netherlands, 8–10 December 2010; pp. 1–8. [Google Scholar]
- Chen, C.-S.; Lin, J.-M.; Lee, C.-T. Neural Network for WGDOP Approximation and Mobile Location. Math. Probl. Eng. 2013, 2013, 369694. [Google Scholar] [CrossRef]
- Du, H.; Hong, Y.; Xia, N.; Zhang, G.; Yu, Y.; Zhang, J. A Navigation Satellites Selection Method Based on ACO with Polarized Feedback. Proc. IEEE Access 2020, 8, 168246–168261. [Google Scholar] [CrossRef]
- Meng, X.; Wang, S.; Nie, P.; Niu, Z.; Zhu, B. An Efficient Genetic Algorithm of Multi-Constellation Satellite Selection. In Proceedings of the 2018 IEEE 4th International Conference on Computer and Communications, ICCC 2018, Chengdu, China, 7–10 December 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 2200–2204. [Google Scholar]
- Meng, F.; Zhu, B.; Wang, S. A New Fast Satellite Selection Algorithm for BDS-GPS Receivers. In Proceedings of the SiPS 2013 Proceedings, Taipei, Taiwan, 16–18 October 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 371–376. [Google Scholar]
- Jwo, D.-J. Efficient DOP Calculation for GPS with and without Altimeter Aiding. J. Navig. 2001, 54, 269–279. [Google Scholar] [CrossRef]
- Hong, Y.; Xu, S. A Navigation Satellite Selection Method Based on Optimized DPSO Algorithm. In Proceedings of the 2020 IEEE 6th Intl Conference on Big Data Security on Cloud (BigDataSecurity), IEEE Intl Conference on High Performance and Smart Computing, (HPSC) and IEEE Intl Conference on Intelligent Data and Security (IDS), Baltimore, MD, USA, 25–27 May 2020; pp. 174–179. [Google Scholar]
- Abedi, A.A.; Mosavi, M.R.; Mohammadi, K. A New Recursive Satellite Selection Method for Multi-Constellation GNSS. Surv. Rev. 2020, 52, 330–340. [Google Scholar] [CrossRef]
- Xia, J.; Wang, Y.; Li, Y. A Navigation Satellite Selection Method Based on Tabu Search Artificial Bee Colony Algorithm. In Proceedings of the IEEE 3rd International Conference on Electronic Information and Communication Technology (ICEICT), Shenzhen, China, 13–15 November 2020; pp. 421–425. [Google Scholar]
- Mosavi, M.R.; Shiroie, M. Efficient Evolutionary Algorithms for GPS Satellites Classification. Arab. J. Sci. Eng. 2012, 37, 2003–2015. [Google Scholar] [CrossRef]
- Doong, S.H. A Closed-Form Formula for GPS GDOP Computation. GPS Solut. 2009, 13, 183–190. [Google Scholar] [CrossRef]
- Wu, C.H.; Su, W.H. A Comparative Study on Regression Models of GPS GDOP Using Soft-Computing Techniques. In Proceedings of the 2009 IEEE International Conference on Fuzzy Systems, Jeju, Republic of Korea, 20–24 August 2009; pp. 1513–1516. [Google Scholar] [CrossRef]
- Habboub, M.; Psimoulis, P.A.; Bingley, R.; Rothacher, M. A Multiple Algorithm Approach to the Analysis of GNSS Coordinate Time Series for Detecting Geohazards and Anomalies. J. Geophys. Res. Solid Earth 2020, 125, e2019JB018104. [Google Scholar] [CrossRef]
- Sairo, H.; Akopian, D.; Takala, J. Weighted Dilution of Precision as Quality Measure in Satellite Positioning. IEE Proc. Radar Sonar Navig. 2003, 150, 430–436. [Google Scholar] [CrossRef]
- Rost, C.; Wanninger, L. Carrier Phase Multipath Mitigation Based on GNSS Signal Quality Measurements. J. Appl. Geod. 2009, 3, 81–87. [Google Scholar] [CrossRef]
- Madonsela, B.; Davidson, I.; Mukubwa, E. The Use of the Carrier to Noise Ratios (C/N0) to Alleviate the Problematic GNSS Phase Multipath. In Proceedings of the 2022 30th Southern African Universities Power Engineering Conference (SAUPEC 2022), Durban, South Africa, 25–27 January 2022; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2022. [Google Scholar]
- Karaboga, D. An Idea Based on Honey Bee Swarm For Numerical Optimization. Tech. Rep. TR06 Erciyes Univ. Eng. Fac. Comput. Eng. Dep. 2005, 200, 1–10. [Google Scholar] [CrossRef]
- Abu-Mouti, F.S.; El-Hawary, M.E. Overview of Artificial Bee Colony (ABC) Algorithm and Its Applications. In Proceedings of the 2012 IEEE International Systems Conference SysCon 2012, Vancouver, BC, Canada, 19–22 March 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 1–6. [Google Scholar]
- Pian, J.; Wang, G.; Li, B. An Improved ABC Algorithm Based on Initial Population and Neighborhood Search. IFAC-Pap 2018, 51, 251–256. [Google Scholar] [CrossRef]
- Zhu, G.; Kwong, S. Gbest-Guided Artificial Bee Colony Algorithm for Numerical Function Optimization. Appl. Math. Comput. 2010, 217, 3166–3173. [Google Scholar] [CrossRef]
- Dorigo, M.; Maniezzo, V.; Colorni, A. Ant System: Optimization by a Colony of Cooperating Agents. IEEE Trans. Syst. Man Cybern. Part B Cybern. 1996, 26, 29–41. [Google Scholar] [CrossRef] [PubMed]
- Ab Wahab, M.N.; Nefti-Meziani, S.; Atyabi, A. A Comprehensive Review of Swarm Optimization Algorithms. PLoS ONE 2015, 10, e0122827. [Google Scholar] [CrossRef] [PubMed]
- Dai, X.; Long, S.; Zhang, Z.; Gong, D. Mobile Robot Path Planning Based on Ant Colony Algorithm with A∗ Heuristic Method. Front. Neurorobot. 2019, 13, 15. [Google Scholar] [CrossRef]
- Wang, W.; Zhao, J.; Li, Z.; Huang, J. Smooth Path Planning of Mobile Robot Based on Improved Ant Colony Algorithm. J. Robot. 2021, 2021, 4109821. [Google Scholar] [CrossRef]
- Simon, D. Evolutionary Optimization Algorithms; John Wiley & Sons Inc.: Hoboken, NJ, USA, 2013; ProQuest Ebook Central; Available online: https://ebookcentral.proquest.com/lib/nottingham/detail.action?docID=1216196 (accessed on 14 May 2024).
- Yang, X.-S. Nature-Inspired Optimization Algorithms, 1st ed.; Elsevier: Amsterdam, The Netherlands, 2014; ProQuest Ebook Central; Available online: https://ebookcentral.proquest.com/lib/nottingham/detail.action?docID=1637335 (accessed on 10 May 2024).
- Yang, L.; Yang, X.; Wu, Y.; Liu, X. Applied Research on Distributed Generation Optimal Allocation Based on Improved Estimation of Distribution Algorithm. Energies 2018, 11, 2363. [Google Scholar] [CrossRef]
- Li, Q.; Liu, S.Y.; Yang, X.S. Influence of Initialization on the Performance of Metaheuristic Optimizers. Appl. Soft Comput. J. 2020, 91, 106193. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle Swarm Optimization. In Proceedings of the ICNN’95—International Conference on Neural Networks, Perth, WA, Australia, 27 November–1 December 1995; IEEE: Piscataway, NJ, USA, 1995; Volume 4, pp. 1942–1948. [Google Scholar]
- Lee, K.Y.; Park, J.-B. Application of Particle Swarm Optimization to Economic Dispatch Problem: Advantages and Disadvantages. In Proceedings of the 2006 IEEE PES Power Systems Conference and Exposition, Atlanta, GA, USA, 29 October–1 November 2006; IEEE: Piscataway, NJ, USA, 2006; pp. 188–192. [Google Scholar]
- Gad, A.G. Particle Swarm Optimization Algorithm and Its Applications: A Systematic Review. Arch. Comput. Methods Eng. 2022, 29, 2531–2561. [Google Scholar] [CrossRef]
- Li, M.; Du, W.; Nian, F. An Adaptive Particle Swarm Optimization Algorithm Based on Directed Weighted Complex Network. Math. Probl. Eng. 2014, 2014, 434972. [Google Scholar] [CrossRef]
- Kirkpatrick, S.; Gelatt, C.D.; Vecchi, M.P. Optimization by Simulated Annealing. Science 1983, 220, 671–680. [Google Scholar] [CrossRef] [PubMed]
- Aydin, L.; Artem, H.S. Design and Optimization of Fiber Composites. In Fiber Technology for Fiber-Reinforced Composites; Elsevier: Amsterdam, The Netherlands, 2017; pp. 299–315. ISBN 9780081009932. [Google Scholar]
- Austbø, B.; Wahl, P.E.; Gundersen, T. Constraint Handling in Stochastic Optimization Algorithms for Natural Gas Liquefaction Processes. In 23 European Symposium On Computer Aided Process Engineering; Elsevier: Amsterdam, The Netherlands, 2013; Volume 32, pp. 445–450. [Google Scholar]
- Strasser, S.; Goodman, R.; Sheppard, J.; Butcher, S. A New Discrete Particle Swarm Optimization Algorithm. In Proceedings of the Genetic and Evolutionary Computation Conference 2016, Denver, CO, USA, 20–24 July 2016. [Google Scholar] [CrossRef]
- Zhao, D.; Cai, C.; Li, L. A Binary Discrete Particle Swarm Optimization Satellite Selection Algorithm with a Queen Informant for Multi-GNSS Continuous Positioning. Adv. Space Res. 2021, 68, 3521–3530. [Google Scholar] [CrossRef]
- Chen, Q.; Peng, Y.; Zhang, M.; Yin, Q. Application Analysis on PSO Algorithm in the Discrete Optimization Problems. J. Phys. Conf. Ser. 2021, 2078, 012018. [Google Scholar] [CrossRef]
- Eiben, Á.E.; Hinterding, R.; Michalewicz, Z. Parameter Control in Evolutionary Algorithms. IEEE Trans. Evol. Comput. 1999, 3, 124–141. [Google Scholar] [CrossRef]
- Krink, T.; Ursem, R.K. Parameter Control Using the Agent Based Patchwork Model. In Proceedings of the 2000 Congress on Evolutionary Computation, CEC 2000, La Jolla, CA, USA, 16–19 July 2000; IEEE Computer Society: Piscataway, NJ, USA, 2000; Volume 1, pp. 77–83. [Google Scholar]
- de Andrade, L.N.; Mauri, G.R.; Mendonça, A.S.F. General Multiobjective Model and Simulated Annealing Algorithm for Waste-Load Allocation. J. Water Resour. Plan Manag. 2013, 139, 339–344. [Google Scholar] [CrossRef]
- Meng, X.; Nie, P.; Sun, J.; Niu, Z.; Zhu, B. A Novel Satellite Selection Method Based On Genetic Algorithm. In Proceedings of the 2018 11th UK-Europe-China Workshop on Millimeter Waves and Terahertz Technologies (UCMMT), Hangzhou, China, 5–7 September 2018; Volume 1, pp. 1–3. [Google Scholar]
- Faisal, S.F.; Beig, A.R.; Thomas, S. Time Domain Particle Swarm Optimization of PI Controllers for Bidirectional VSC HVDC Light System. Energies 2020, 13, 866. [Google Scholar] [CrossRef]
- Piotrowski, A.P.; Napiorkowski, J.J.; Piotrowska, A.E. Population Size in Particle Swarm Optimization. Swarm. Evol. Comput. 2020, 58, 100718. [Google Scholar] [CrossRef]
- Veček, N.; Liu, S.H.; Črepinšek, M.; Mernik, M. On the Importance of the Artificial Bee Colony Control Parameter ‘Limit’. Inf. Technol. Control 2017, 46, 566–604. [Google Scholar] [CrossRef]
- Wang, E.; Sun, C.; Wang, C.; Qu, P.; Huang, Y.; Pang, T. A Satellite Selection Algorithm Based on Adaptive Simulated Annealing Particle Swarm Optimization for the BeiDou Navigation Satellite System/Global Positioning System Receiver. Int. J. Distrib. Sens. Netw. 2021, 17, 155014772110317. [Google Scholar] [CrossRef]
- Tsoy, Y.R. The Influence of Population Size and Search Time Limit on Genetic Algorithm. In Proceedings of the 7th Korea-Russia International Symposium on Science and Technology, Proceedings KORUS 2003, (IEEE Cat. No. 03EX737), Ulsan, Republic of Korea, 28 June–6 July 2003; pp. 181–187. [Google Scholar]
- Xue, C.; Psimoulis, P.A. Monitoring the Dynamic Response of a Pedestrian Bridge by Using Low-Cost GNSS Receivers. Eng. Struct. 2023, 284, 115993. [Google Scholar] [CrossRef]
- Psimoulis, P.A.; Houlié, N.; Habboub, M.; Michel, C.; Rothacher, M. Detection of Ground Motions Using High-Rate GPS Time-Series. Geophys. J. Int. 2018, 214, 1237–1251. [Google Scholar] [CrossRef]


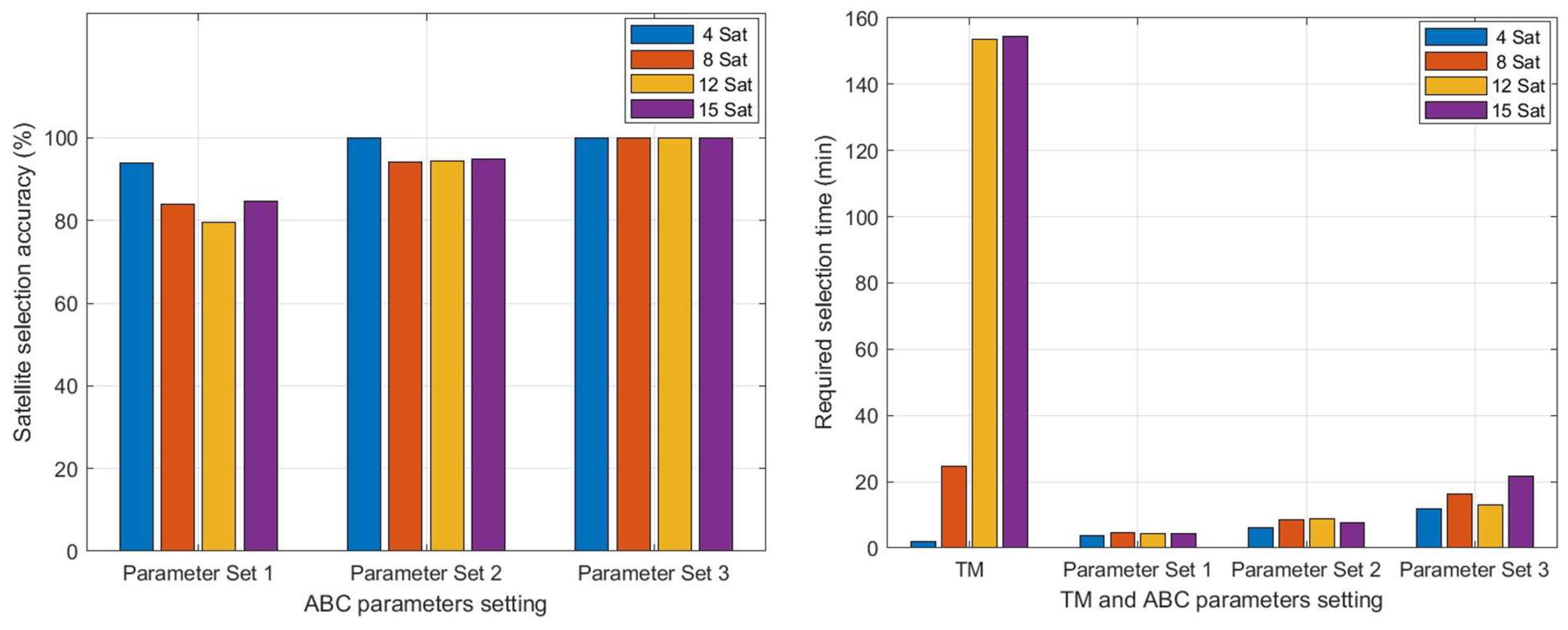
| Setting | maxIter | pSize | Limit |
|---|---|---|---|
| 1 | 100 | 100 | D × pSize |
| 2 | 100 | 200 | D × pSize |
| 3 | 200 | 200 | D × pSize |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alluhaybi, A.; Psimoulis, P.; Remenyte-Prescott, R. An Evaluation of Optimization Algorithms for the Optimal Selection of GNSS Satellite Subsets. Remote Sens. 2024, 16, 1794. https://doi.org/10.3390/rs16101794
Alluhaybi A, Psimoulis P, Remenyte-Prescott R. An Evaluation of Optimization Algorithms for the Optimal Selection of GNSS Satellite Subsets. Remote Sensing. 2024; 16(10):1794. https://doi.org/10.3390/rs16101794
Chicago/Turabian StyleAlluhaybi, Abdulaziz, Panos Psimoulis, and Rasa Remenyte-Prescott. 2024. "An Evaluation of Optimization Algorithms for the Optimal Selection of GNSS Satellite Subsets" Remote Sensing 16, no. 10: 1794. https://doi.org/10.3390/rs16101794
APA StyleAlluhaybi, A., Psimoulis, P., & Remenyte-Prescott, R. (2024). An Evaluation of Optimization Algorithms for the Optimal Selection of GNSS Satellite Subsets. Remote Sensing, 16(10), 1794. https://doi.org/10.3390/rs16101794