
Deformation Analysis and Prediction of a High-Speed Railway Suspension Bridge under Multi-Load Coupling

 ,
,  , , , ,
, , , ,
Abstract
1. Introduction
2. Methodology
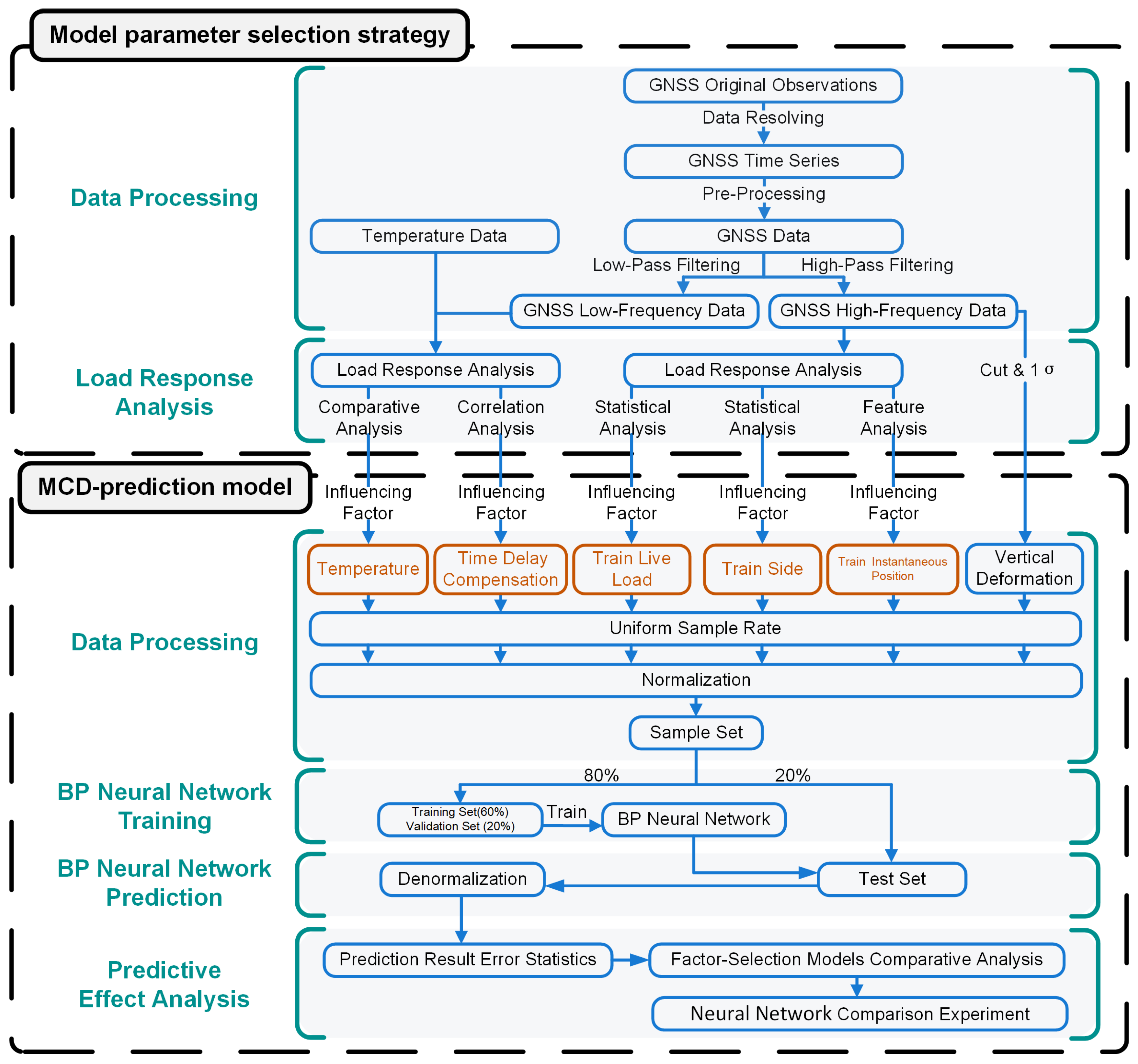
2.1. Model Parameter Selection Strategy
2.2. Multi-Load Coupling Deformation Prediction Model
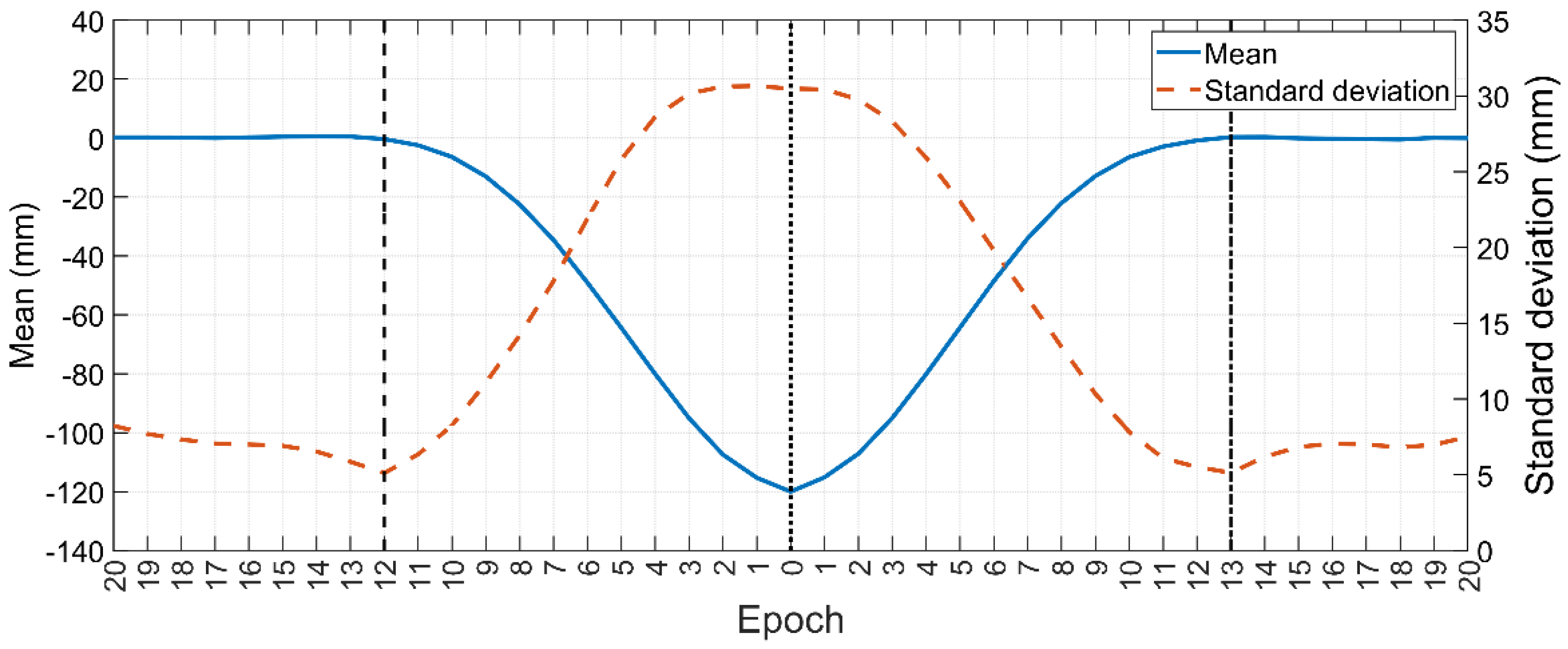
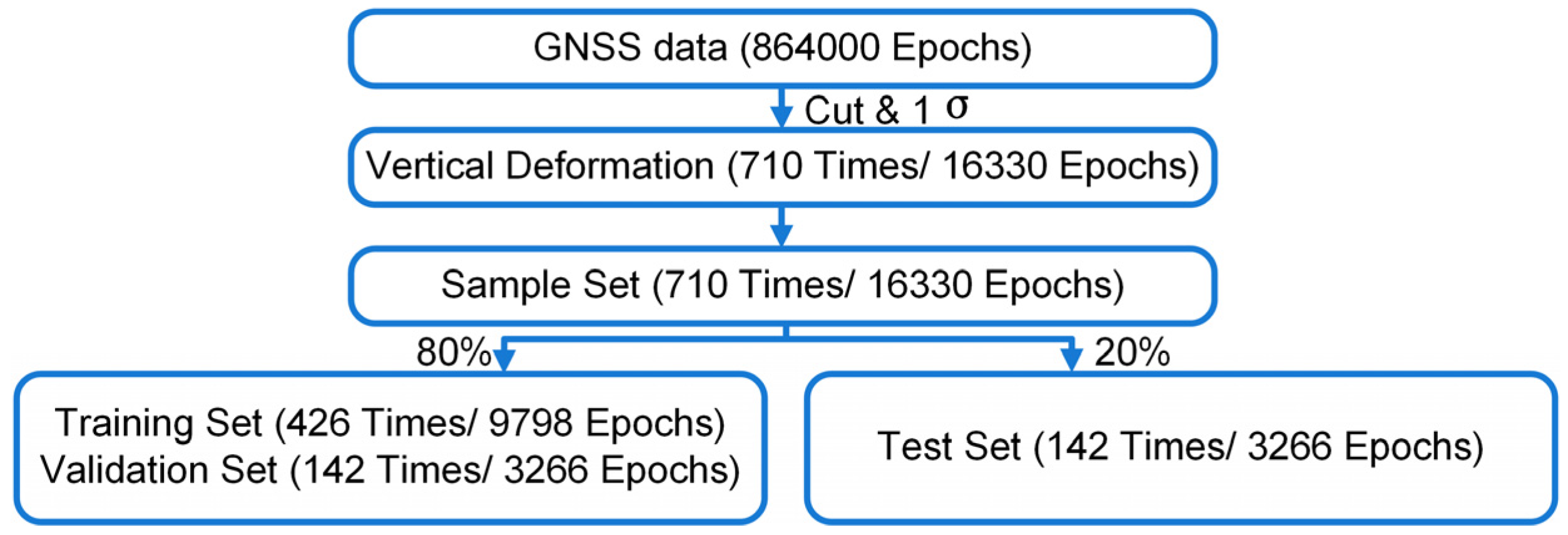
- Data processing: The GNSS high-frequency data with an extreme value within 1σ during train passage are intercepted as the vertical deformation. Subsequently, the five influencing factors are resampled based on the vertical deformation sampling rate. To eliminate the dimensional impact between the indicators, all data were normalized to form a complete sample set.
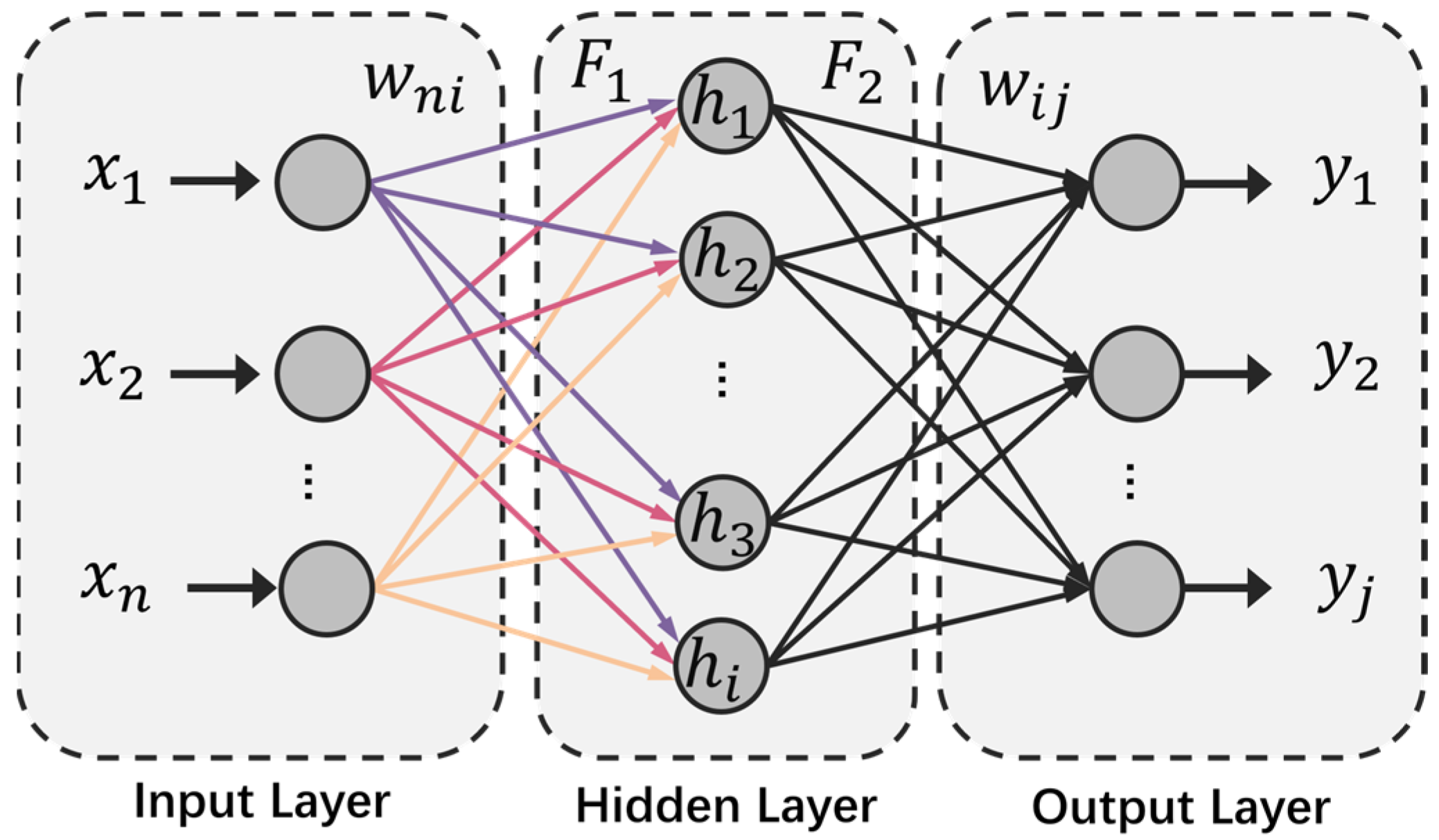
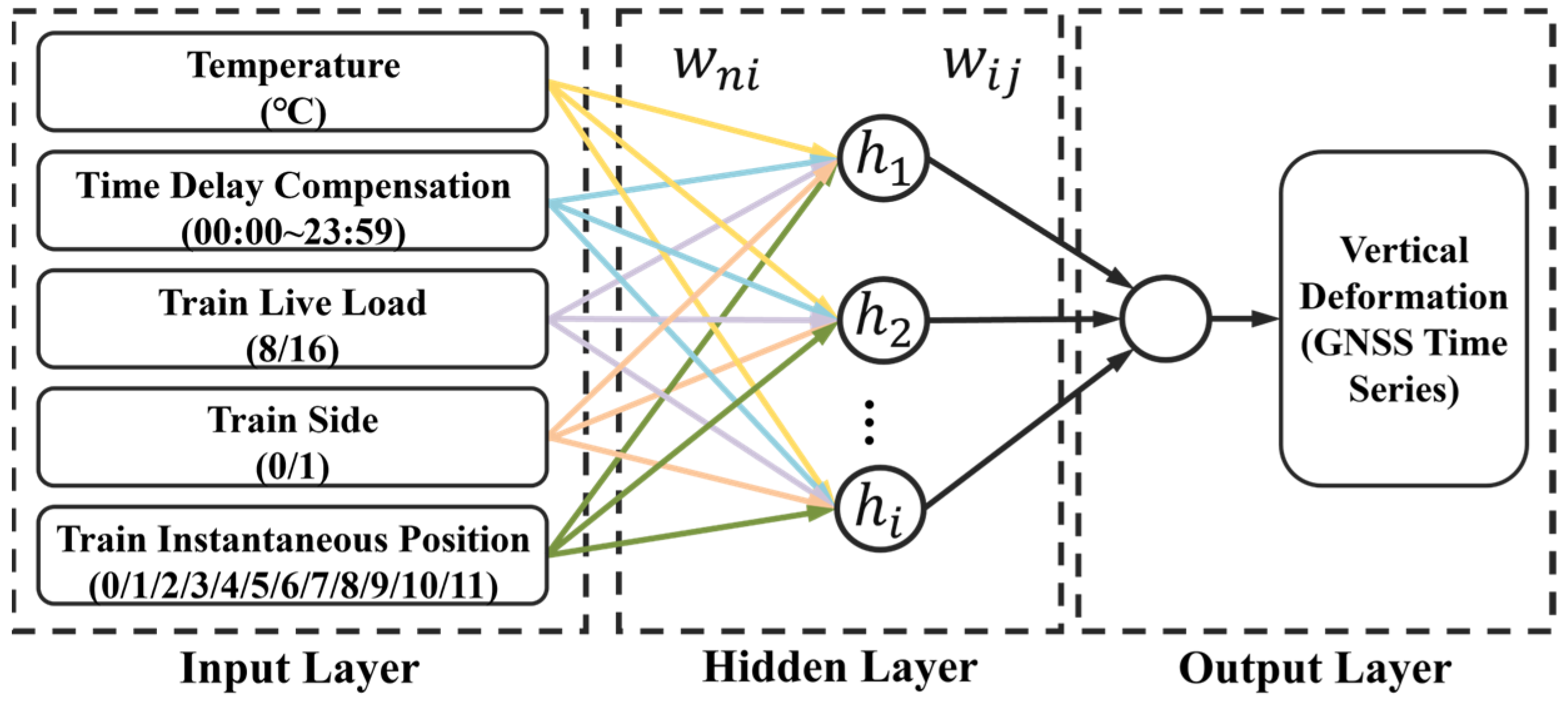
- BP neural network training: To train the BP neural network, 60% of the sample set was used as the training set, and 20% of the sample set was used as the validation set, in which TEMP, TDC, TLL, TS, and TIP were inputs, and the vertical deformation was the output.The BP neural network is a multilayer feedforward neural network trained according to the error backpropagation algorithm, which can be used for function approximation. It is one of the most widely used neural network models. It has strong nonlinear mapping ability. The number of sublayers and neurons in each layer of the network can be set according to the pertinent requirements; therefore, this network is suitable for multiple input prediction.The BP neural network structure is shown in Figure 2 and has three layers: the input, hidden, and output layers. The BP algorithm consists of two parts: forward propagation of information and backpropagation of errors, in which the input () is calculated from the input layer to the output layer () through the hidden layer based on the activation function (). If the desired output is not obtained in the output layer, the error change in the output layer is calculated. Subsequently, backpropagation through the network returns the error signal along the original connection path to modify the weight () of each layer of neurons until the desired goal is achieved.
- BP neural network prediction: A total of 20% of the sample set was used as the test set, which was input into the trained BP neural network. The predicted results were then normalized.
- Analysis of the prediction effect in terms of performance metrics. A factor selection model was used to compare the contributions of each factor to the prediction. Neural network comparison experiments were then used to analyze BP prediction ability. In all the prediction effect analyses, we used the residual , MAE, and MRE. The MAE, MRE, and coefficient of determination (R2) were calculated to evaluate the prediction accuracy of the proposed model [15]. According to the MRE and MAE criteria, the smaller the value, the more accurate the model, indicating a higher prediction accuracy. For a group of measurement data , the MAE formula (Equation (2)), the MRE formula (Equation (3)), and R2 (Equation (4)) are as follows, respectively:
3. Background for a Study Case
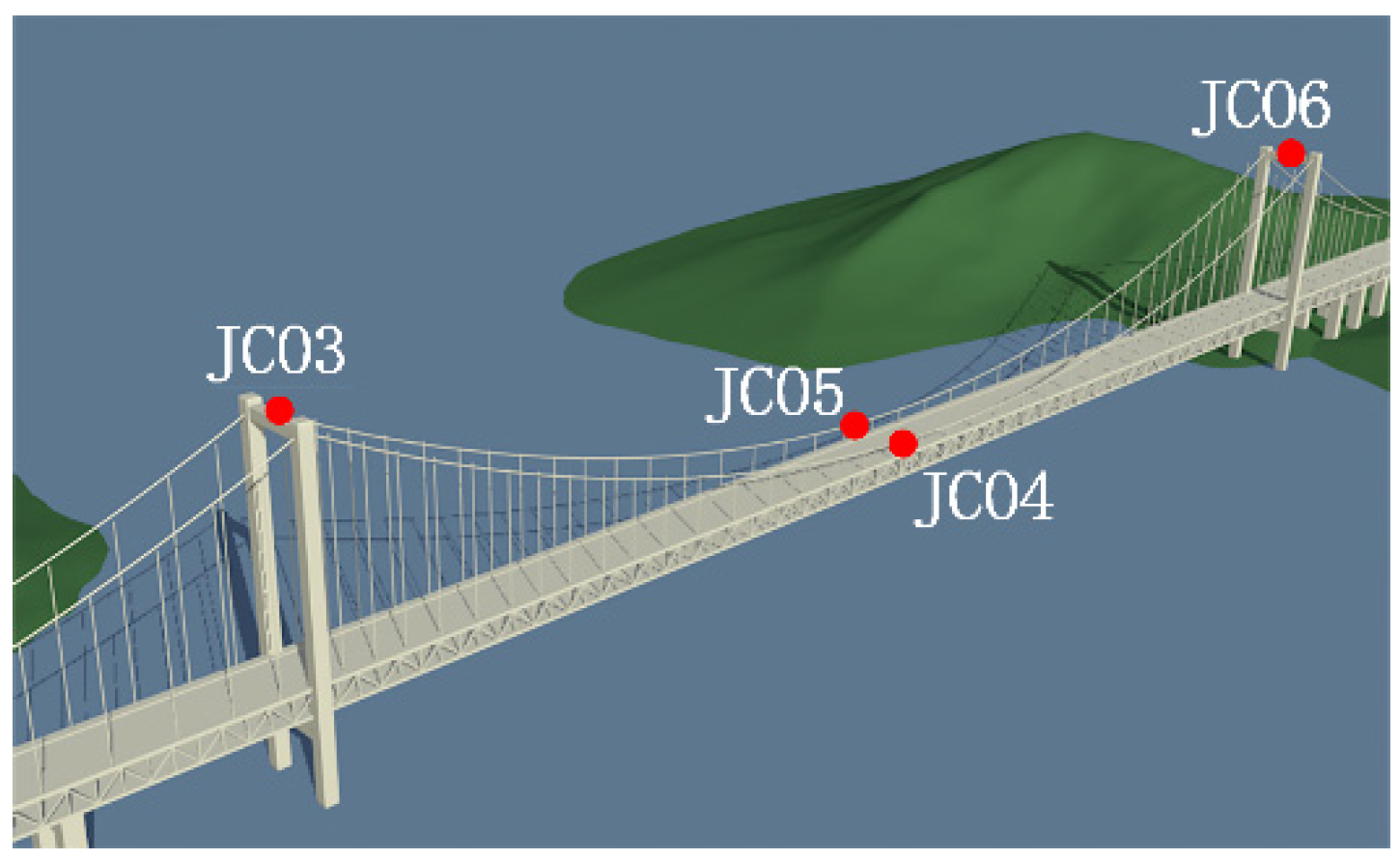
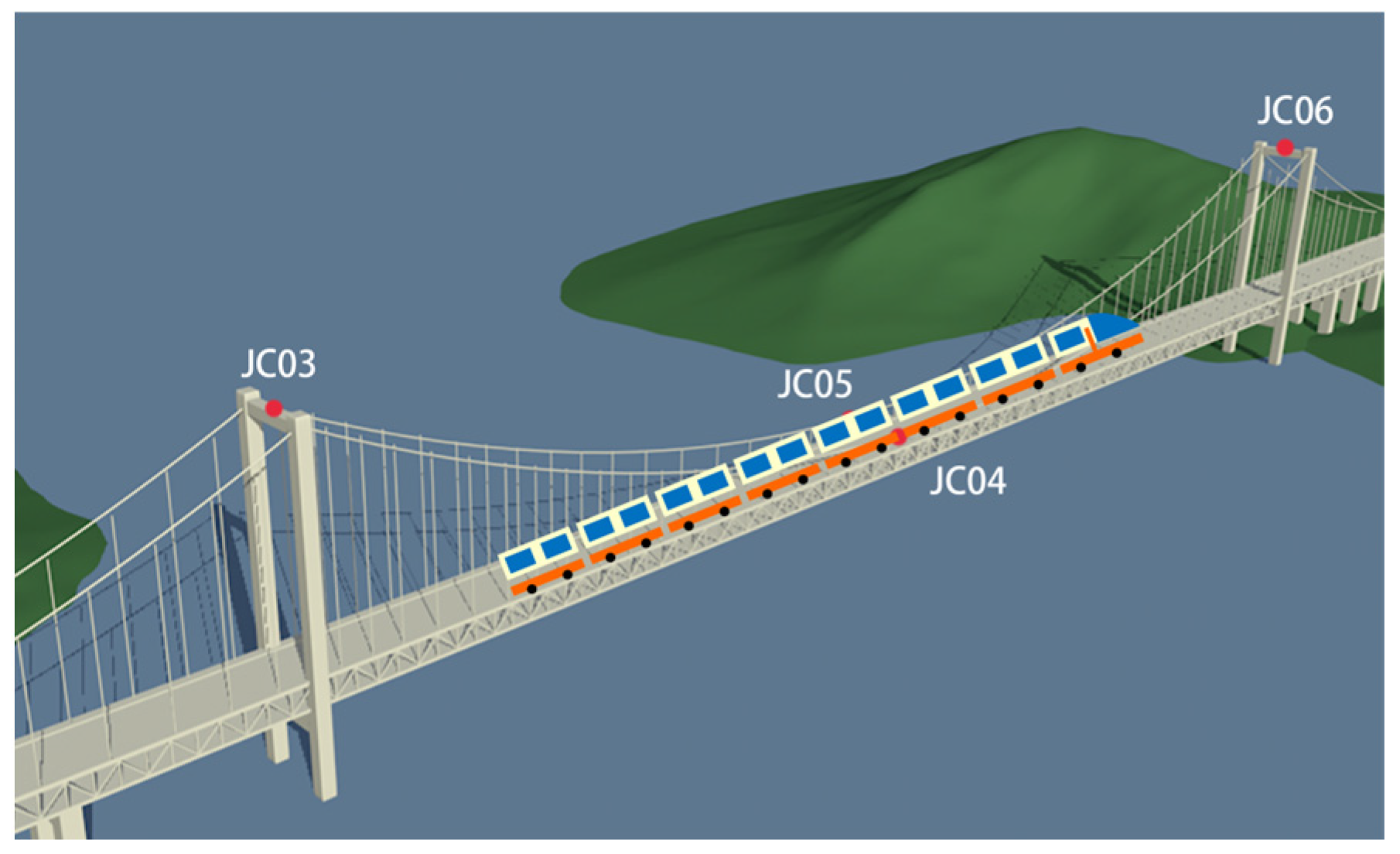
3.1. Bridge Description
3.2. Monitoring Scheme in the Field
3.3. Characteristics of the Monitoring Data
4. Results
4.1. Model Parameter Selection Strategy
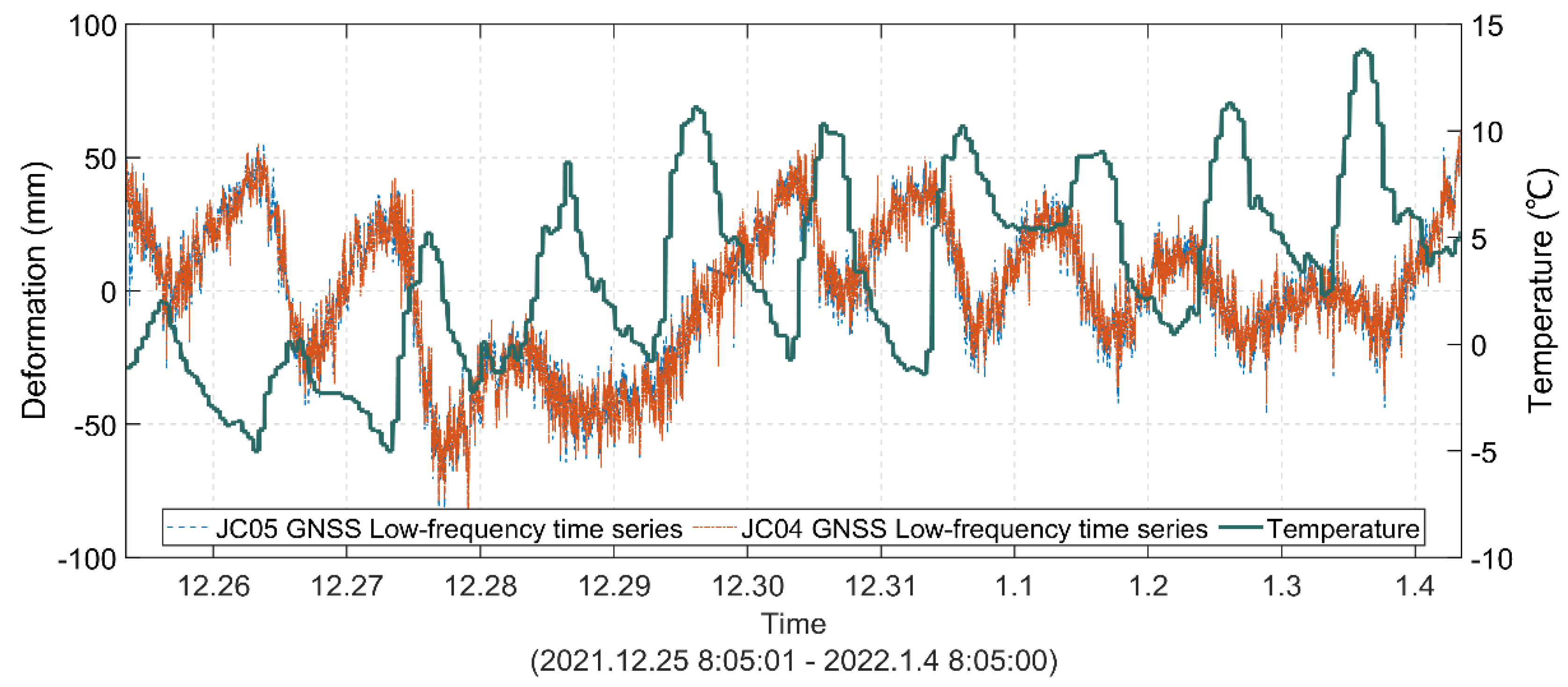
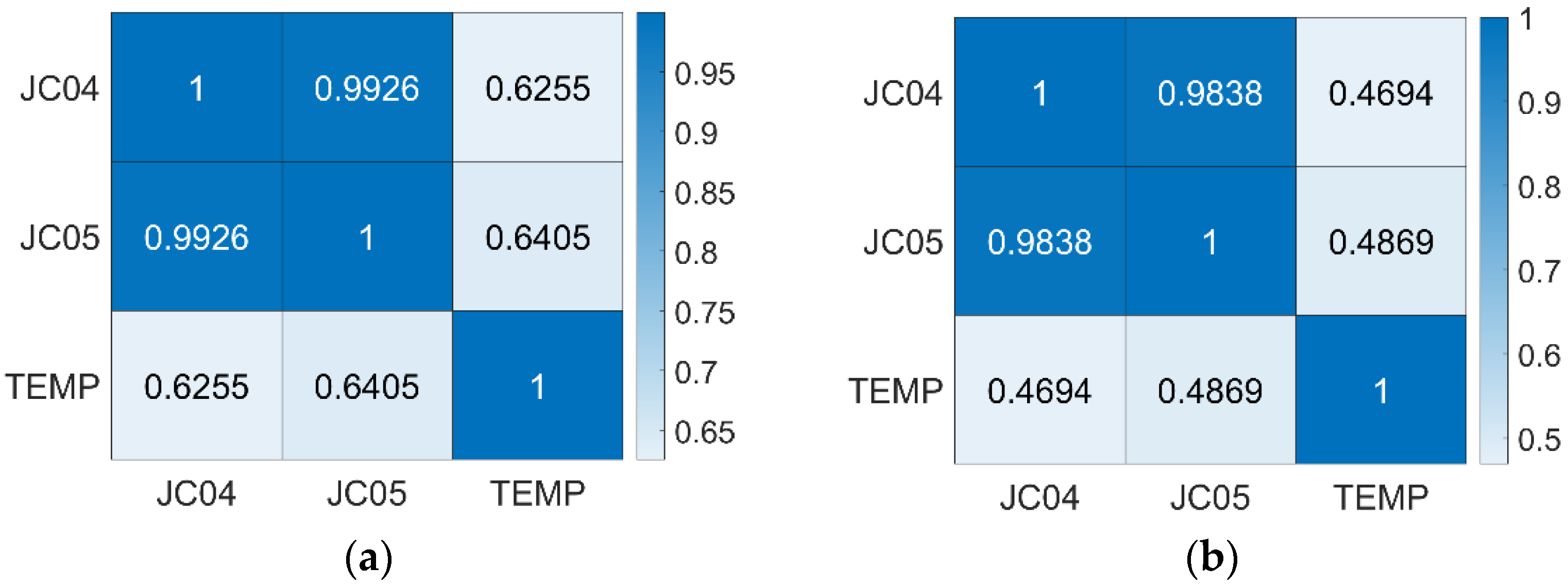
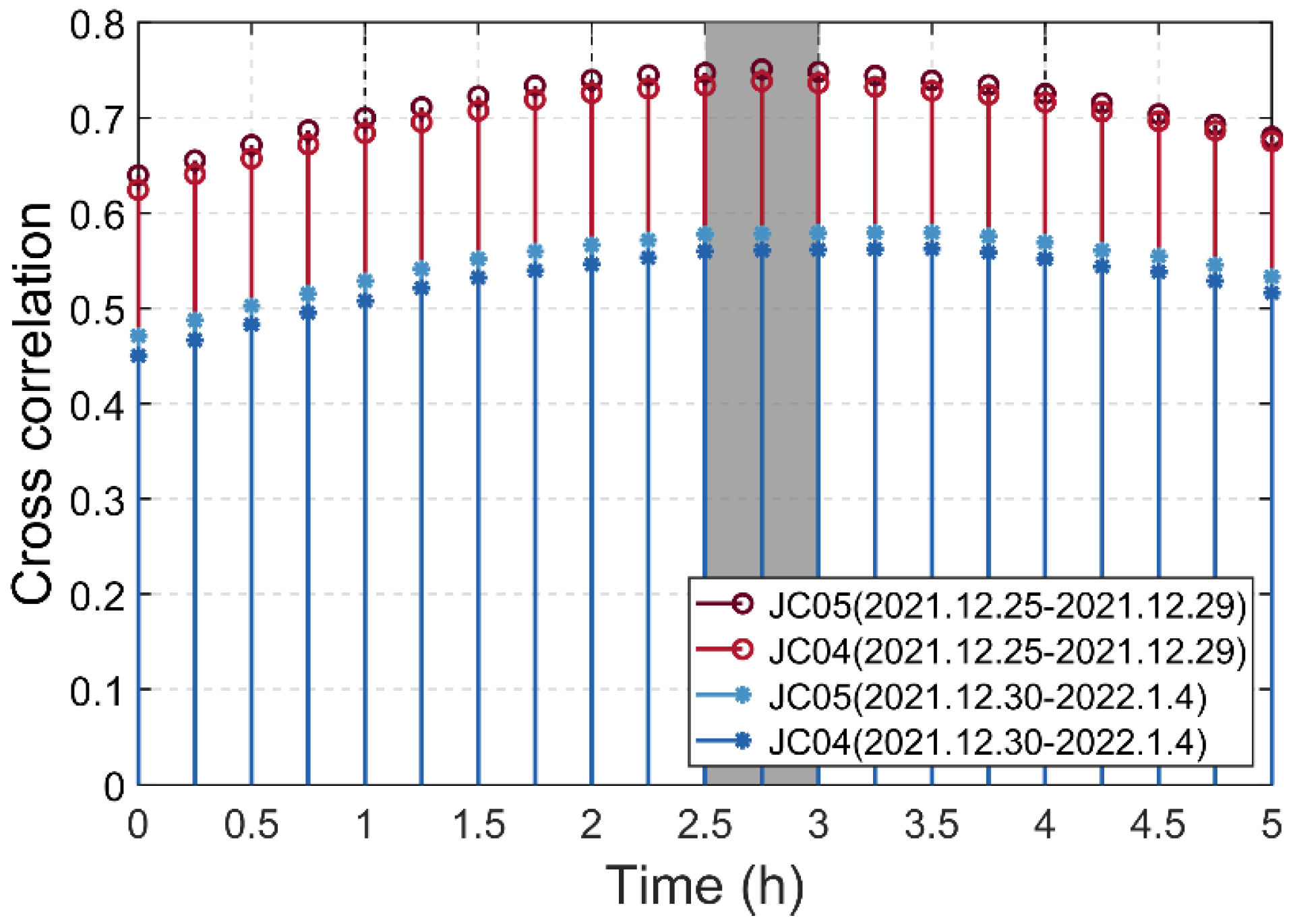
4.1.1. Temperature, Time Delay Compensation, and Their Correlation with Vertical Deformation
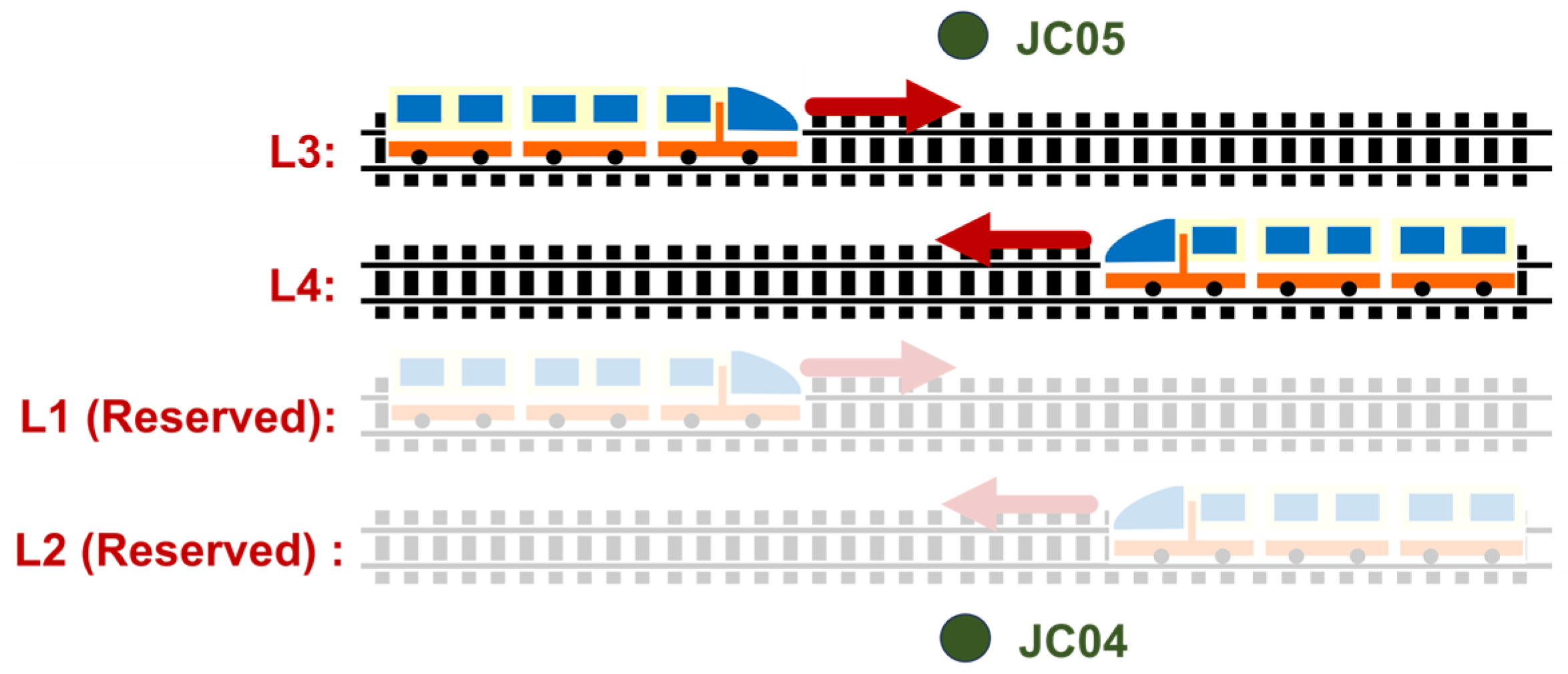
4.1.2. Train Live Load, Train Side, and Their Correlations with Vertical Deformation
4.1.3. Train Instantaneous Position and Its Correlation with Vertical Deformation
4.2. MCD Prediction Model
4.2.1. MCD Prediction Model Data
4.2.2. BP Neural Network Architecture
- 1.
- BP input layer
- 2.
- BP hidden layer
4.3. Experimental Results
5. Discussion
6. Conclusions
- Based on the load response analysis within the model parameter selection strategy of a high-speed railway suspension bridge, we conclude that vertical deformations result from a combination of five primary influencing factors: the temperature, time delay compensation, train live load, train side, and instantaneous train position.
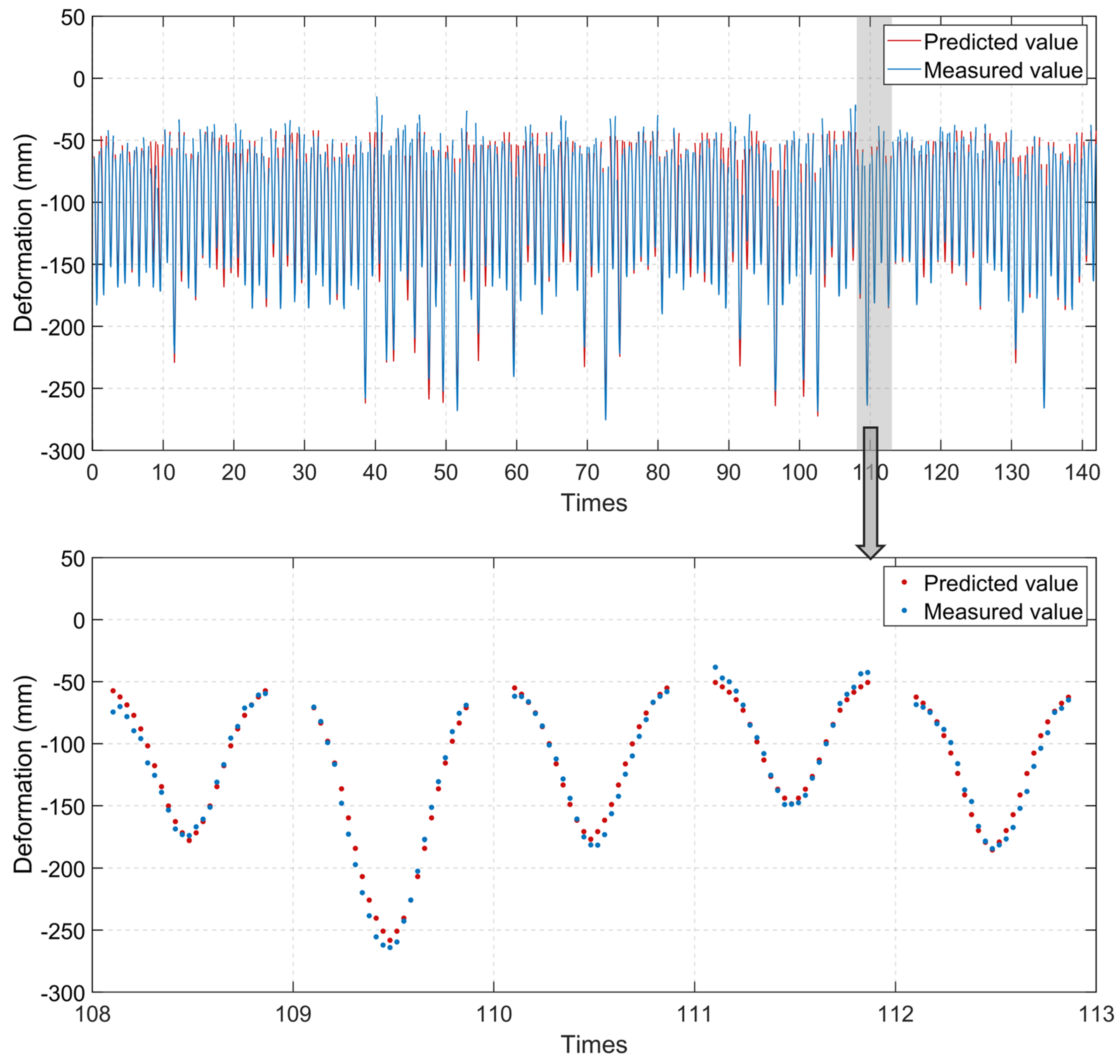
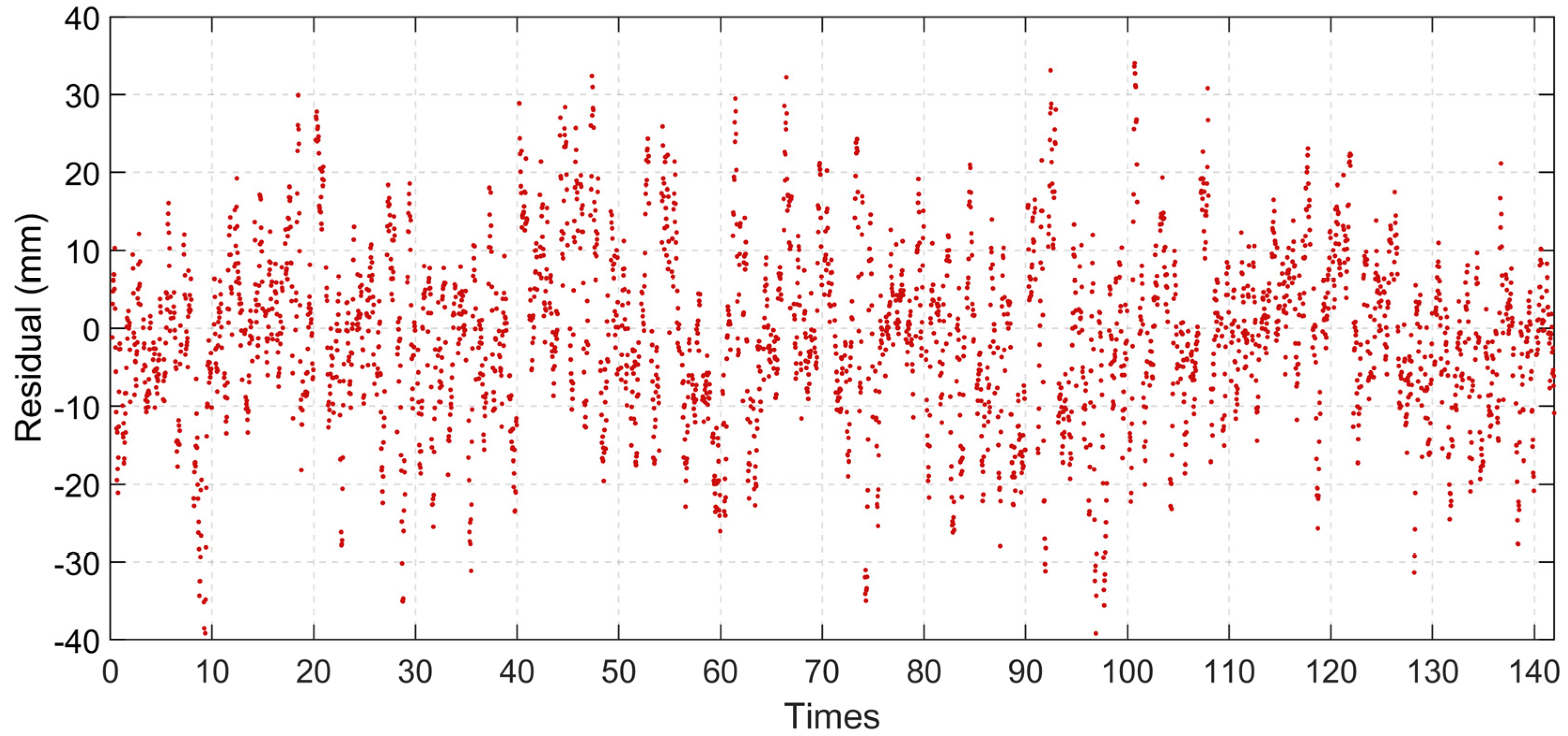
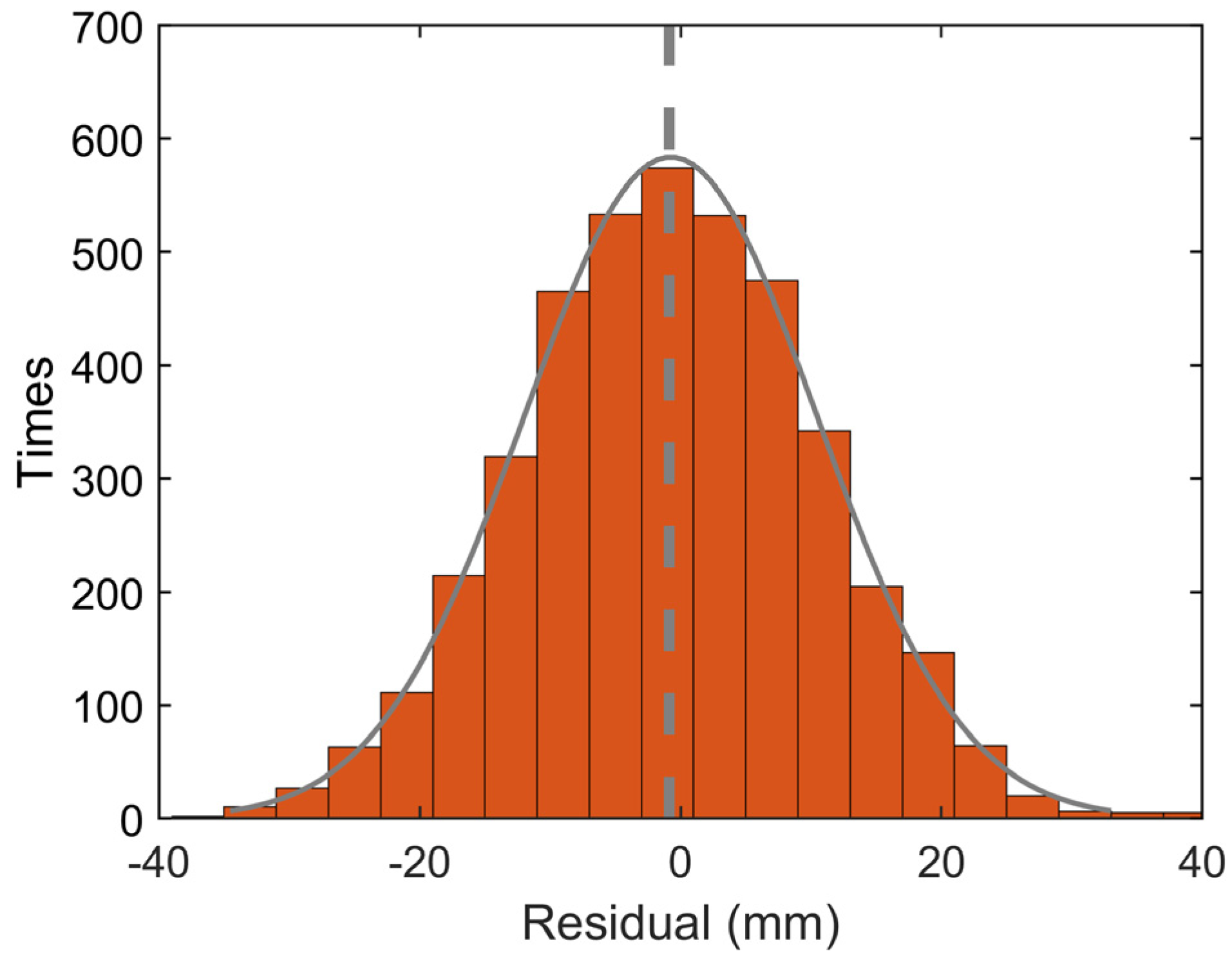
- The experimental results reveal a strong agreement between the predicted and measured values. The residual mean absolute error (MAE) was 8.81 mm, with a mean relative error (MRE) of 9.82% and a coefficient of determination (R2) of 0.94. These findings affirm the method’s capacity to accurately predict multifactor-coupled vertical deformations and nonlinear mapping relationships, further underscoring the suitability of the established multi-load coupling deformation model for vertical deformation prediction for high-speed railway suspension bridges.
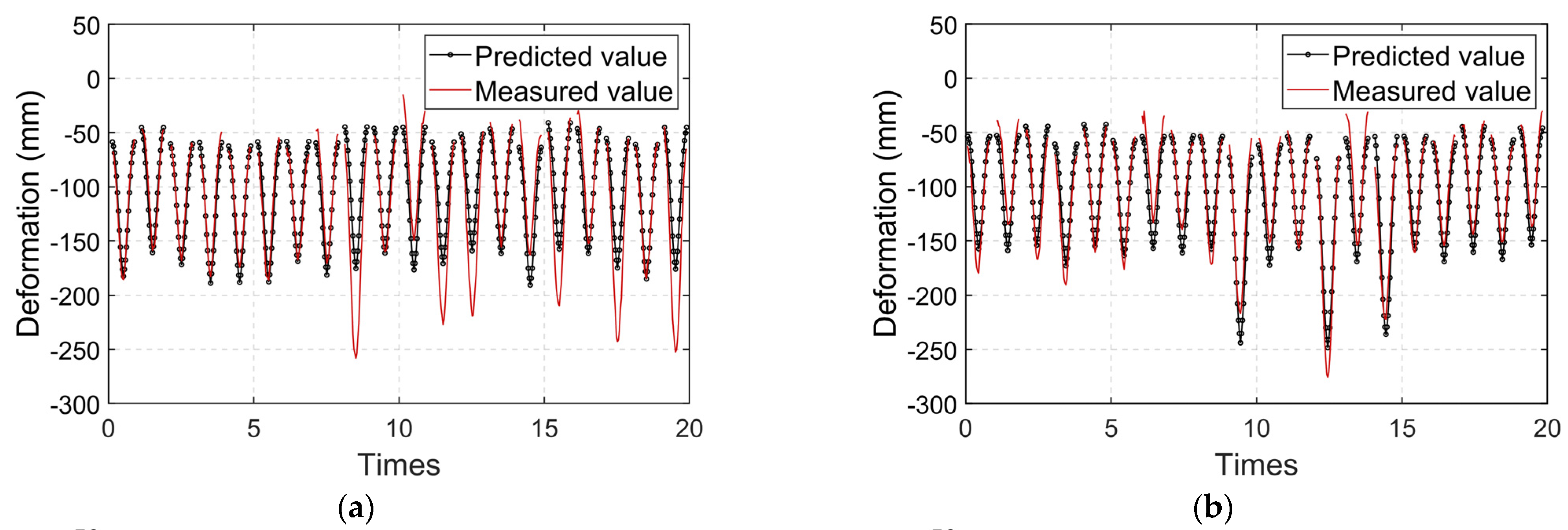
- In comparison to the factor selection model, the multi-load coupling deformation model aligns more closely with the measured vertical deformation, exhibiting a significantly higher prediction accuracy, with an improvement of up to 77.88%. Notably, when considering the three influencing factors of train live load, train side, and train instantaneous position, the improvement rate increases to 77.76%.
- In the comparison experiments involving neural networks, all the models exhibited strong prediction capabilities due to the ample input data for extracting deformation features. The backpropagation (BP) neural network outperformed the other models.
- This study contributes to the achievement of a comprehensive understanding of the behavior patterns exhibited by high-speed railway suspension bridges. The findings of this study hold significant importance in enhancing our comprehension of the structural stability of high-speed railway suspension bridges, offering valuable insights for future research endeavors.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Li, W.J.; Gong, J.X.; Zhang, X.G. Study on live load reduction factors of train for long span mul-titrack railway suspension bridges. Structures 2021, 32, 1180–1191. [Google Scholar] [CrossRef]
- Xu, G.Y. Design of Long Span Railway Suspension Bridges; Shanghai Science and Technology Press: Shanghai, China, 2020; p. 14. (In Chinese) [Google Scholar]
- Li, Y.J. Current Situation and Expectation of Construction Technology for HSP Suspension Bridge with Kilometers Span. China Railw. 2019, 1–8. (In Chinese) [Google Scholar]
- Guo, H.; Su, P.F.; Zhao, X.X.; Liu, X.G.; Le, S.T. Displacement Characteristics at Girder End of Long Span Railway Suspension Bridge Under Design Loads. Railway Eng. 2019, 59, 14–19. (In Chinese) [Google Scholar]
- Tan, S.H.; Li, Z.W.; Shi, J.; Ma, D.K. Influence of Track Profile Setting on Dynamic Behavior of High-Speed Railway Suspension Bridge with Kilometer Span. China Railw. Sci. 2021, 42, 58–67. (In Chinese) [Google Scholar]
- Luo, J.F. Analysis of the Train Running Safety of Multi—Line Railway Cable—Stayed Bridge. J. Railw. Eng. Soc. 2018, 35, 58–62. (In Chinese) [Google Scholar]
- Zhao, K.Y.; Wang, H.; Gao, H. Antiseismic performance of the world’s first high-speed railway suspension bridge. J. Harbin Eng. Univ. 2021, 42, 1262–1270. (In Chinese) [Google Scholar]
- Zhang, W.M.; Lu, X.F.; Wang, Z.W.; Liu, Z. Effect of the main cable bending stiffness on flexural and torsional vibrations of suspension bridges: Analytical approach. Eng. Struct. 2021, 240, 112393. [Google Scholar] [CrossRef]
- Xu, X.; Ren, Y.; Huang, Q.; Fan, Z.Y.; Tong, Z.J.; Chang, W.J.; Liu, B. Anomaly detection for large span bridges during operational phase using structural health monitoring data. Smart Mater. Struct. 2020, 29, 045029. [Google Scholar] [CrossRef]
- Tang, H.Q.; Xu, G.Y.; Liu, H.S. Feasibility Analysis of Applying of Suspension Bridge Type to Railway Bridges. Bridge Constr. 2017, 47, 13–18. (In Chinese) [Google Scholar]
- Zhang, W.M.; Lu, X.F.; Chang, J.Q.; Tian, G.M. An Analytical Algorithm for Estimating the Deck’s Maximum Deflection and Deck-End Rotation Angle of a Suspension Bridge under Live Load. J. Bridge Eng. 2022, 27, 04022055. [Google Scholar] [CrossRef]
- Ding, Y.L.; Zhao, H.W.; Deng, L.; Li, A.Q.; Wang, M.Y. Early Warning of Abnormal Train-Induced Vibrations for a Steel-Truss Arch Railway Bridge: Case Study. J. Bridge Eng. 2017, 22, 05017011. [Google Scholar] [CrossRef]
- Fan, Z.; Huang, Q.; Ren, Y.; Xu, X.; Zhu, Z. Real-Time Dynamic Warning on Deflection Abnormity of Cable-Stayed Bridges Considering Operational Environment Variations. J. Perform. Constr. Facil. 2020, 35, 04020123. [Google Scholar] [CrossRef]
- He, Z.; Li, W.; Salehi, H.; Zhang, H.; Zhou, H.; Jiao, P. Integrated structural health monitoring in bridge engineering. Autom. Constr. 2022, 136, 104168. [Google Scholar] [CrossRef]
- Ye, X.W.; Sun, Z.; Lu, J. Prediction and early warning of wind-induced girder and tower vibration in cable-stayed bridges with machine learning-based approach. Eng. Struct. 2023, 275, 115261. [Google Scholar] [CrossRef]
- Lee, J.; Jeong, S.; Lee, J.; Sim, S.H.; Lee, K.C.; Lee, Y.J. Sensor data-based probabilistic monitoring of time-history deflections of railway bridges induced by high-speed trains. Struct. Health Monit. 2022, 21, 2518–2530. [Google Scholar] [CrossRef]
- Zhou, Y.; Sun, L.M. A comprehensive study of the thermal response of a long-span cable-stayed bridge: From monitoring phenomena to underlying mechanisms. Mech. Syst. Signal Process. 2019, 124, 330–348. [Google Scholar] [CrossRef]
- Meng, Q.L.; Zhu, J.S. Fine temperature effect analysis-based time-varying dynamic properties evaluation of long-span suspension bridges in natural environments. J. Bridge Eng. 2018, 23, 04018075. [Google Scholar] [CrossRef]
- Yang, K.; Ding, Y.; Sun, P.; Zhao, H.; Geng, F. Modeling of temperature time-lag effect for concrete box-girder bridges. Appl. Sci. 2019, 9, 3255. [Google Scholar] [CrossRef]
- Jiang, H.; Wan, C.; Yang, K.; Ding, Y.; Xue, S. Modeling relationships for field strain data under thermal effects using functional data analysis. Measurement 2021, 177, 109279. [Google Scholar] [CrossRef]
- Zhao, H.W.; Ding, Y.L.; Nagarajaiah, S.; Li, A.Q. Behavior Analysis and Early Warning of Girder Deflections of a Steel-Truss Arch Railway Bridge under the Effects of Temperature and Trains: Case Study. J. Bridge Eng. 2019, 24, 05018013. [Google Scholar] [CrossRef]
- Liu, J.B. Analysis of Global Static and Dynamic Property of Long-Span Steel Truss Girder Rail-cum-Road Suspension Bridge. Bridge Constr. 2020, 50, 23–28. (In Chinese) [Google Scholar]
- Zhou, Y.Z.; Chen, L.J.; Gao, C. Design Techniques and Exploration of High-Speed Railway Bridges in China. Bridge Constr. 2018, 48, 11–15. (In Chinese) [Google Scholar]
- Wang, H.; Ding, G.; Tang, H.; Chen, L.K. Numerical Seismic Analysis of Simply-Supported Girder Railway Bridge under High-Speed Train Load. Appl. Mech. Mater. 2011, 80–81, 566–570. [Google Scholar] [CrossRef]
- Lei, X.; Siringoringo, D.M.; Sun, Z.; Fujino, Y. Displacement response estimation of a cable-stayed bridge subjected to various loading conditions with one-dimensional residual convolutional autoencoder method. Struct. Health Monit. 2023, 22, 1790–1806. [Google Scholar] [CrossRef]
- Qin, S.Q.; Gao, Z.Y. Developments and prospects of long-span high-speed railway bridge technologies in China. Engineering 2017, 3, 787–794. [Google Scholar] [CrossRef]
- Fan, Q.; Meng, X.L.; Nguyen, D.T.; Xie, Y.; Yu, J. Predicting displacement of bridge based on CEEMDAN-KELM model using GNSS monitoring data. J. Appl. Geod. 2020, 14, 253–261. [Google Scholar] [CrossRef]
- Xu, Y.; Fenerci, A.; Øiseth, O.; Moan, T. Efficient prediction of wind and wave induced long-term extreme load effects of floating suspension bridges using artificial neural networks and support vector machines. Ocean Eng. 2020, 217, 107888. [Google Scholar] [CrossRef]
- Kang, F.; Li, J.; Zhao, S.; Wang, Y. Structural health monitoring of concrete dams using long-term air temperature for thermal effect simulation. Eng. Struct. 2019, 180, 642–653. [Google Scholar] [CrossRef]
- Gu, C.S.; Wu, B.Q.; Chen, Y.J. A High-robust displacement prediction model for super-high arch dams integrating wavelet de-noising and improved random forest. Water 2023, 15, 1271. [Google Scholar] [CrossRef]
- Chen, Q.; Jiang, W.; Meng, X.; Jiang, P.; Wang, K.; Xie, Y.; Ye, J. Vertical deformation monitoring of the suspension bridge tower using GNSS: A case study of the Forth Road Bridge in the UK. Remote Sens. 2018, 10, 364. [Google Scholar] [CrossRef]
- Tan, X.; Chen, W.; Tan, X.; Zou, T.; Du, B. Prediction for the future mechanical behavior of underwater shield tunnel fusing deep learning algorithm on SHM data. Tunn. Undergr. Space Technol. 2022, 125, 104504. [Google Scholar] [CrossRef]
- Tan, X.; Sun, X.; Chen, W.; Du, B.; Ye, J.; Sun, L. Investigation on the data augmentation using machine learning algorithms in structural health monitoring information. Struct. Health Monit. 2021, 20, 2054–2068. [Google Scholar] [CrossRef]
- Tan, X.; Chen, W.; Zou, T.; Yang, J.; Du, B. Real-time prediction of mechanical behaviors of underwater shield tunnel structure using machine learning method based on structural health monitoring data. J. Rock Mech. Geotech. Eng. 2023, 15, 886–896. [Google Scholar] [CrossRef]
- Zhao, K.Y.; Wang, H.; Tao, T.Y.; Gao, H.; Wu, T. Parametric analysis on buffeting performance of a long-span high-speed railway suspension bridge. J. Cent. South Univ. 2022, 29, 2574–2588. [Google Scholar] [CrossRef]
- Xu, X.; Huang, Q.; Ren, Y.; Zhao, D.Y.; Yang, J.; Zhang, D.Y. Modeling and separation of thermal effects from cable-stayed bridge response. J. Bridge Eng. 2019, 24, 04019028. [Google Scholar] [CrossRef]
- Zhou, Y.; Sun, L.M. Insights into temperature effects on structural deformation of a cable-stayed bridge based on structural health monitoring. Struct. Health Monit. 2018, 18, 778–791. [Google Scholar] [CrossRef]
- Zhou, Y.; Xia, Y.; Chen, B.; Fujino, Y. Analytical solution to temperature-induced deformation of suspension bridges. Mech. Syst. Signal Process. 2020, 139, 106568. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Influencing Factor Was Removed | MRE | MAE (mm) | R2 | ImprovementRate | ||||
|---|---|---|---|---|---|---|---|---|
| TLL | TS | TEMP | TIP | TDC | ||||
| ✓ | ✓ | ✓ | ✓ | ✓ | 9.82% | 8.81 | 0.94 | / |
| × | 14.59% | 15.28 | 0.78 | 42.34% | ||||
| × | 11.69% | 11.07 | 0.91 | 20.42% | ||||
| × | 10.37% | 9.18 | 0.94 | 4.03% | ||||
| × | 43.19% | 37.58 | 0.18 | 76.56% | ||||
| × | 11.34% | 9.88 | 0.93 | 10.83% | ||||
| × | × | 15.62% | 16.42 | 0.75 | 46.35% | |||
| × | × | 14.46% | 15.08 | 0.77 | 41.58% | |||
| × | × | 45.43% | 39.28 | 0.04 | 77.57% | |||
| × | × | 15.76% | 15.91 | 0.77 | 44.63% | |||
| × | × | 11.90% | 11.22 | 0.91 | 21.48% | |||
| × | × | 44.01% | 37.93 | 0.15 | 76.77% | |||
| × | × | 12.83% | 11.89 | 0.9 | 25.90% | |||
| × | × | 43.60% | 37.65 | 0.17 | 76.60% | |||
| × | × | 11.56% | 10.05 | 0.93 | 12.34% | |||
| × | × | 44.14% | 37.83 | 0.16 | 76.71% | |||
| × | × | × | 15.87% | 16.56 | 0.74 | 46.80% | ||
| × | × | × | 45.85% | 39.61 | 0.01 | 77.76% | ||
| × | × | × | 16.69% | 17 | 0.74 | 48.18% | ||
| × | × | × | 45.28% | 39.33 | 0.03 | 77.60% | ||
| × | × | × | 15.68% | 15.85 | 0.77 | 44.42% | ||
| × | × | × | 45.51% | 39.33 | 0.03 | 77.60% | ||
| × | × | × | 43.76% | 37.95 | 0.15 | 76.79% | ||
| × | × | × | 13.16% | 12.11 | 0.9 | 27.25% | ||
| × | × | × | 45.34% | 38.21 | 0.14 | 76.94% | ||
| × | × | × | 43.84% | 37.77 | 0.16 | 76.67% | ||
| × | × | × | × | 44.78% | 38.15 | 0.14 | 76.91% | |
| × | × | × | × | 45.98% | 39.43 | 0.03 | 77.66% | |
| × | × | × | × | 46.77% | 39.83 | 0.01 | 77.88% | |
| × | × | × | × | 17.07% | 17.34 | 0.74 | 49.19% | |
| × | × | × | × | 46.21% | 39.75 | 0.01 | 77.84% | |
| BP | LSTM | CNN | RBF | SVR | |
|---|---|---|---|---|---|
| MRE | 9.82% | 11.51% | 11.99% | 11.65% | 13.52% |
| MAE (mm) | 8.81 | 9.67 | 9.88 | 10.24 | 12.04 |
| R2 | 0.94 | 0.94 | 0.94 | 0.94 | 0.89 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, S.; Jiang, W.; Chen, Q.; Wang, J.; Tan, X.; Liu, R.; Ye, Z. Deformation Analysis and Prediction of a High-Speed Railway Suspension Bridge under Multi-Load Coupling. Remote Sens. 2024, 16, 1687. https://doi.org/10.3390/rs16101687
Liu S, Jiang W, Chen Q, Wang J, Tan X, Liu R, Ye Z. Deformation Analysis and Prediction of a High-Speed Railway Suspension Bridge under Multi-Load Coupling. Remote Sensing. 2024; 16(10):1687. https://doi.org/10.3390/rs16101687
Chicago/Turabian StyleLiu, Simin, Weiping Jiang, Qusen Chen, Jian Wang, Xuyan Tan, Ruiqi Liu, and Zhongtao Ye. 2024. "Deformation Analysis and Prediction of a High-Speed Railway Suspension Bridge under Multi-Load Coupling" Remote Sensing 16, no. 10: 1687. https://doi.org/10.3390/rs16101687
APA StyleLiu, S., Jiang, W., Chen, Q., Wang, J., Tan, X., Liu, R., & Ye, Z. (2024). Deformation Analysis and Prediction of a High-Speed Railway Suspension Bridge under Multi-Load Coupling. Remote Sensing, 16(10), 1687. https://doi.org/10.3390/rs16101687