


Characterization of BDS Multipath Effect Based on AT-Conv-LSTM Network
Abstract
:1. Introduction
2. Multipath Analysis Method
2.1. Multipath Extraction
2.2. Multipath Analysis Method Based on Different Indicators
3. Multipath Characterization with the AT-Conv-LSTM Network
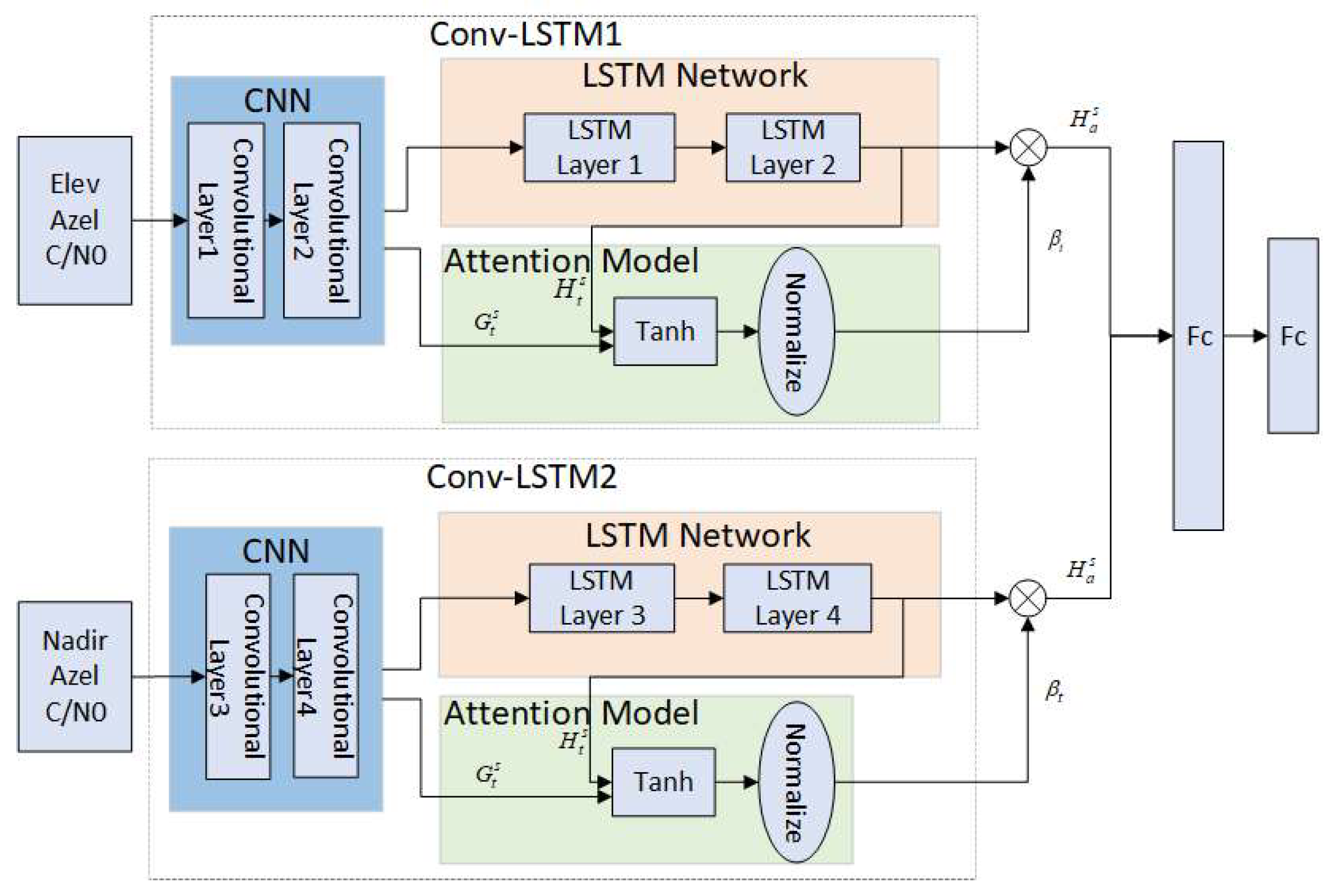
3.1. AT-Conv-LSTM Network
3.2. Attention Mechanism Considering Multiple Indicators
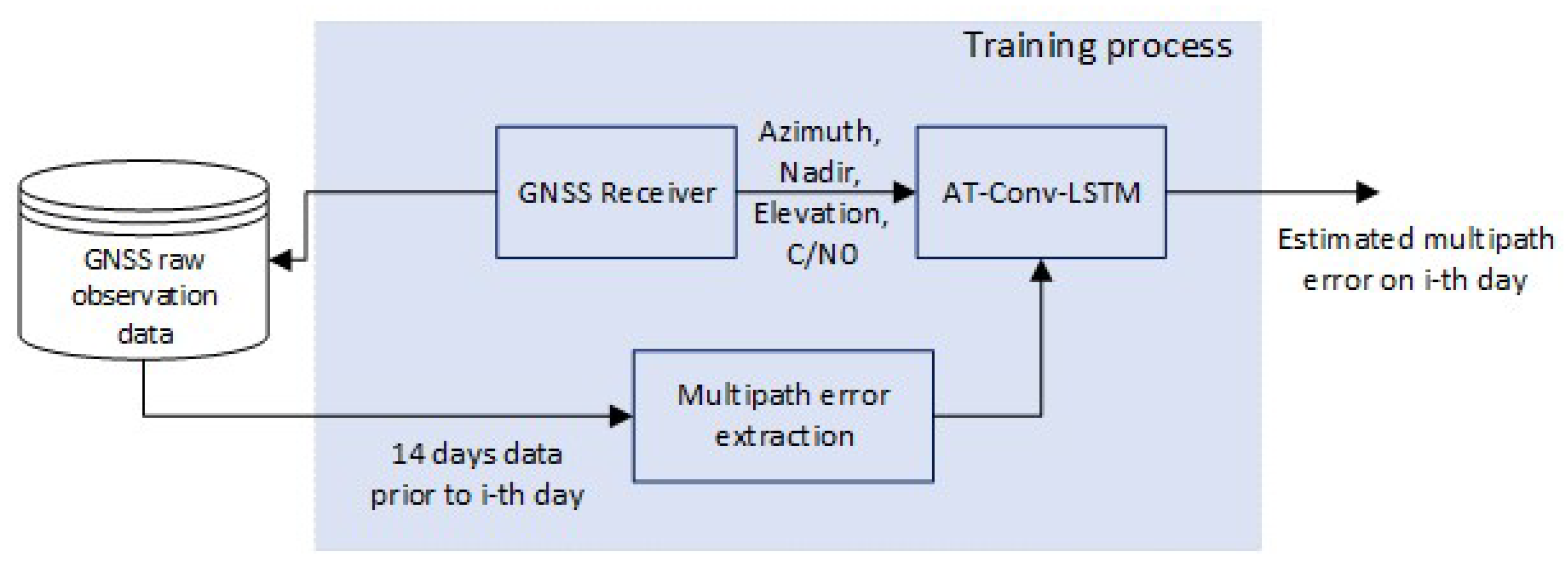
3.3. Model Training and Evaluation
4. Results
4.1. Data Description
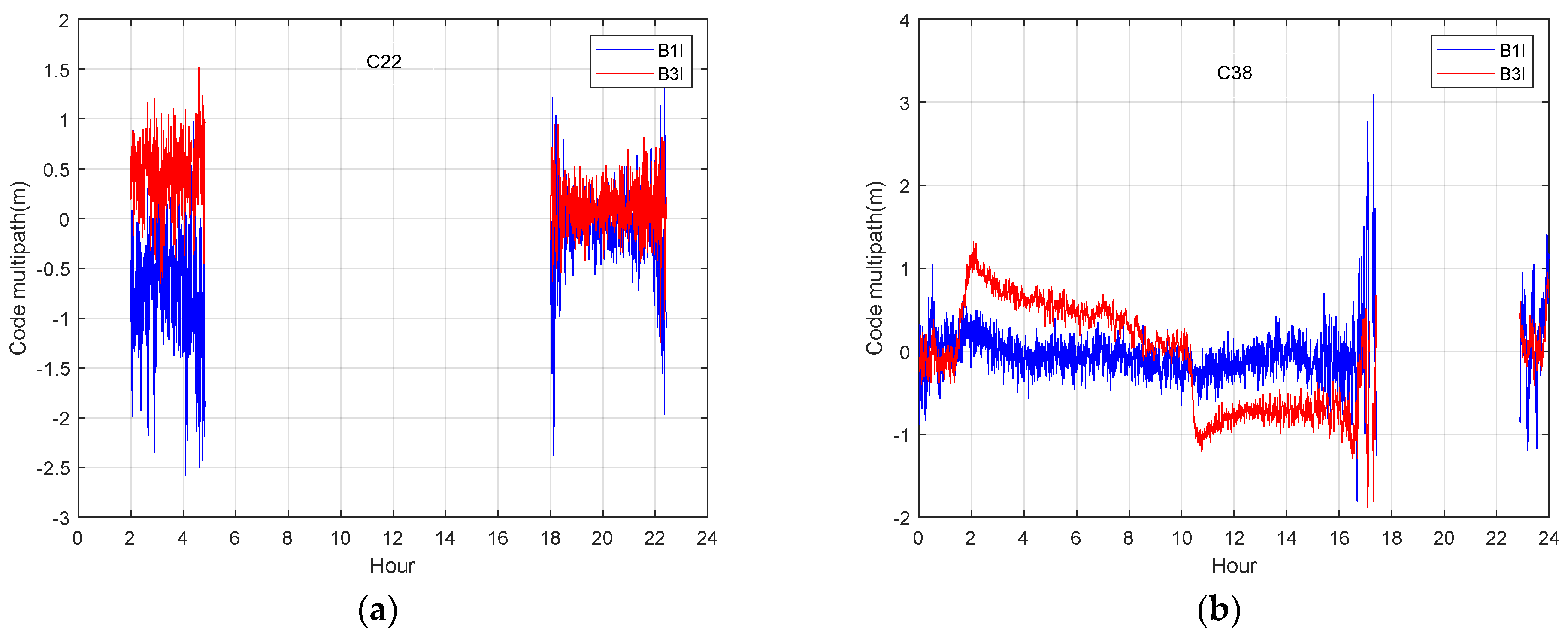
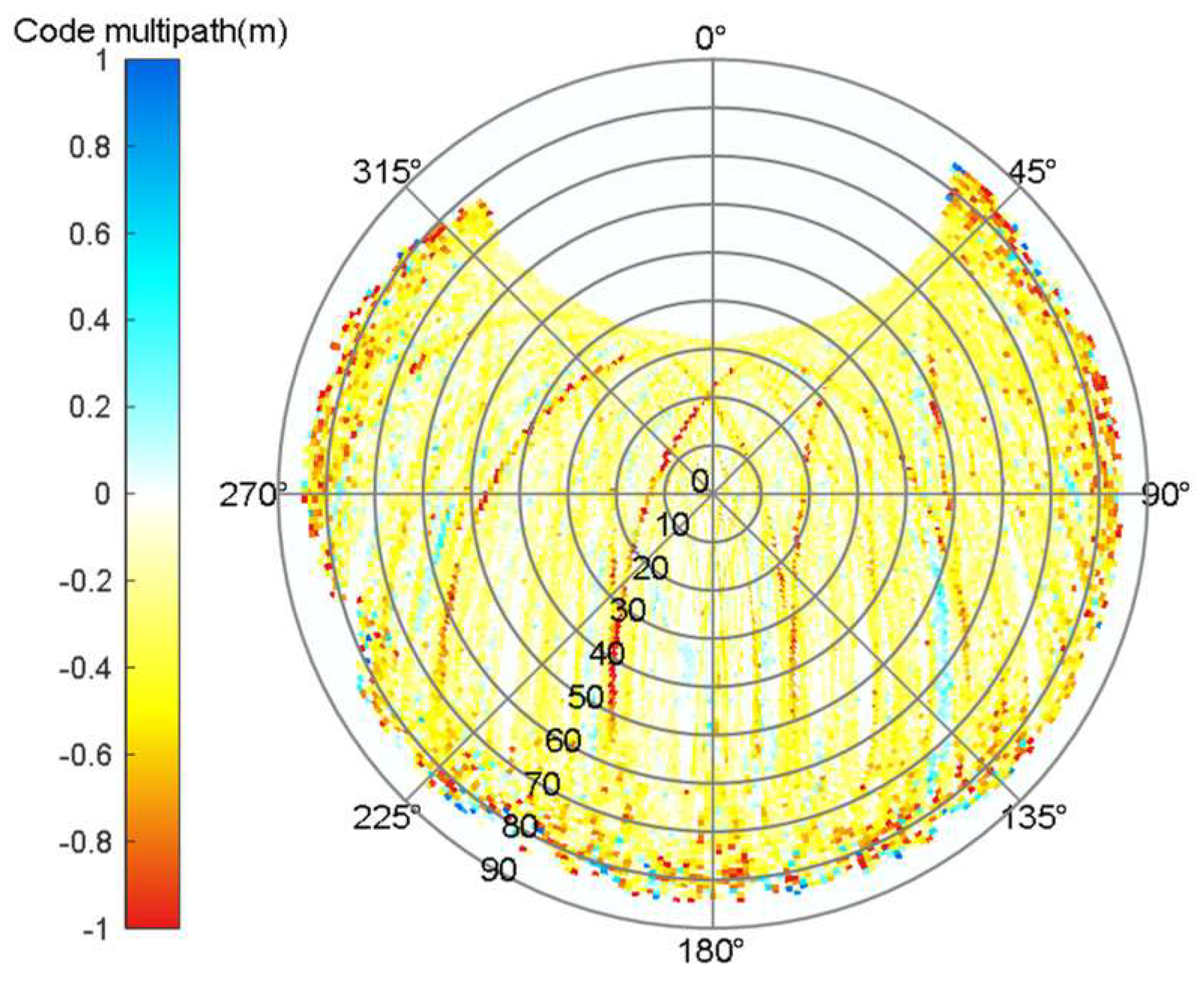
4.2. Code Multipath Analysis
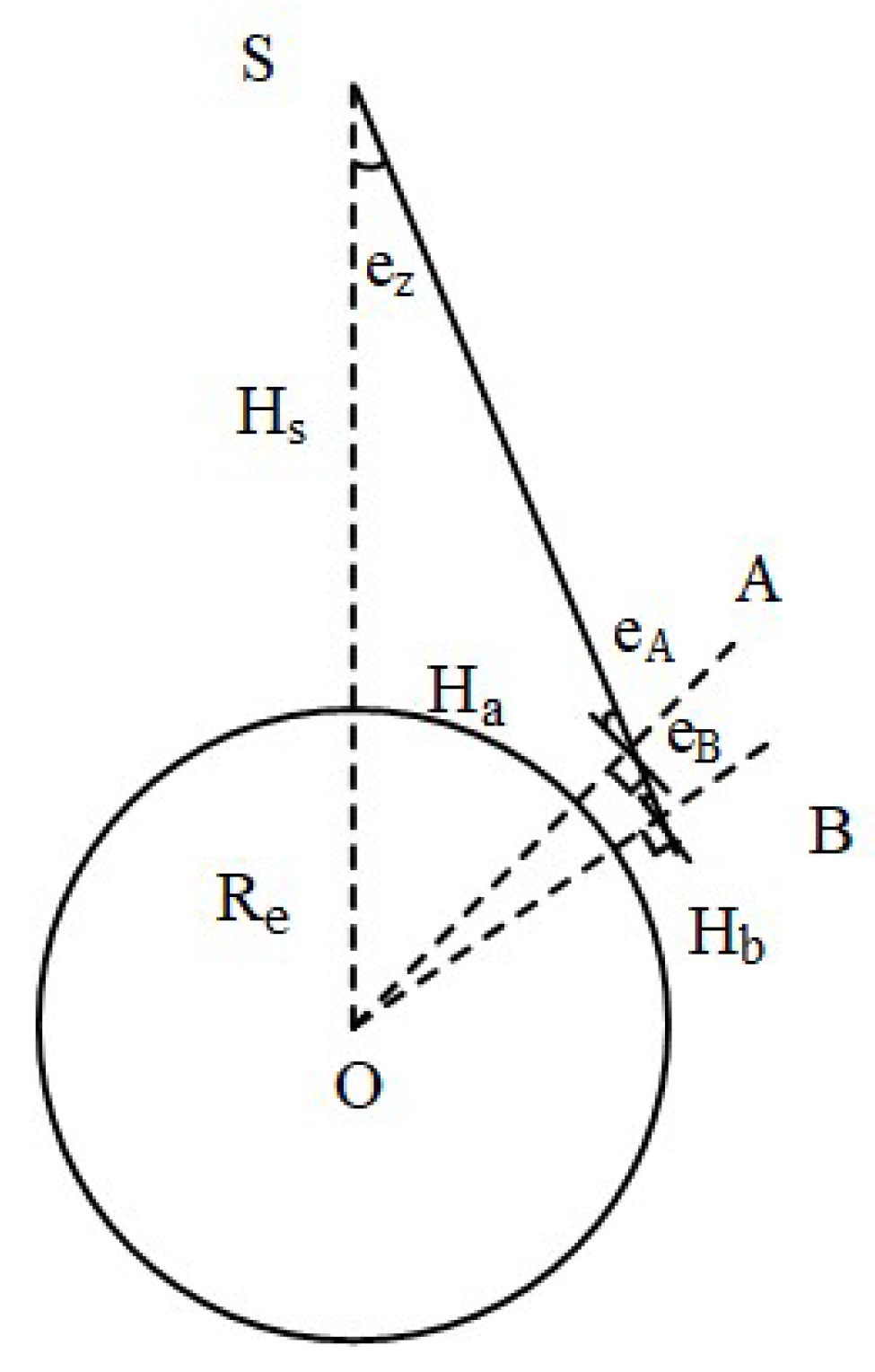
4.3. Correlation Analysis of Nadir Angles and Code Multipath
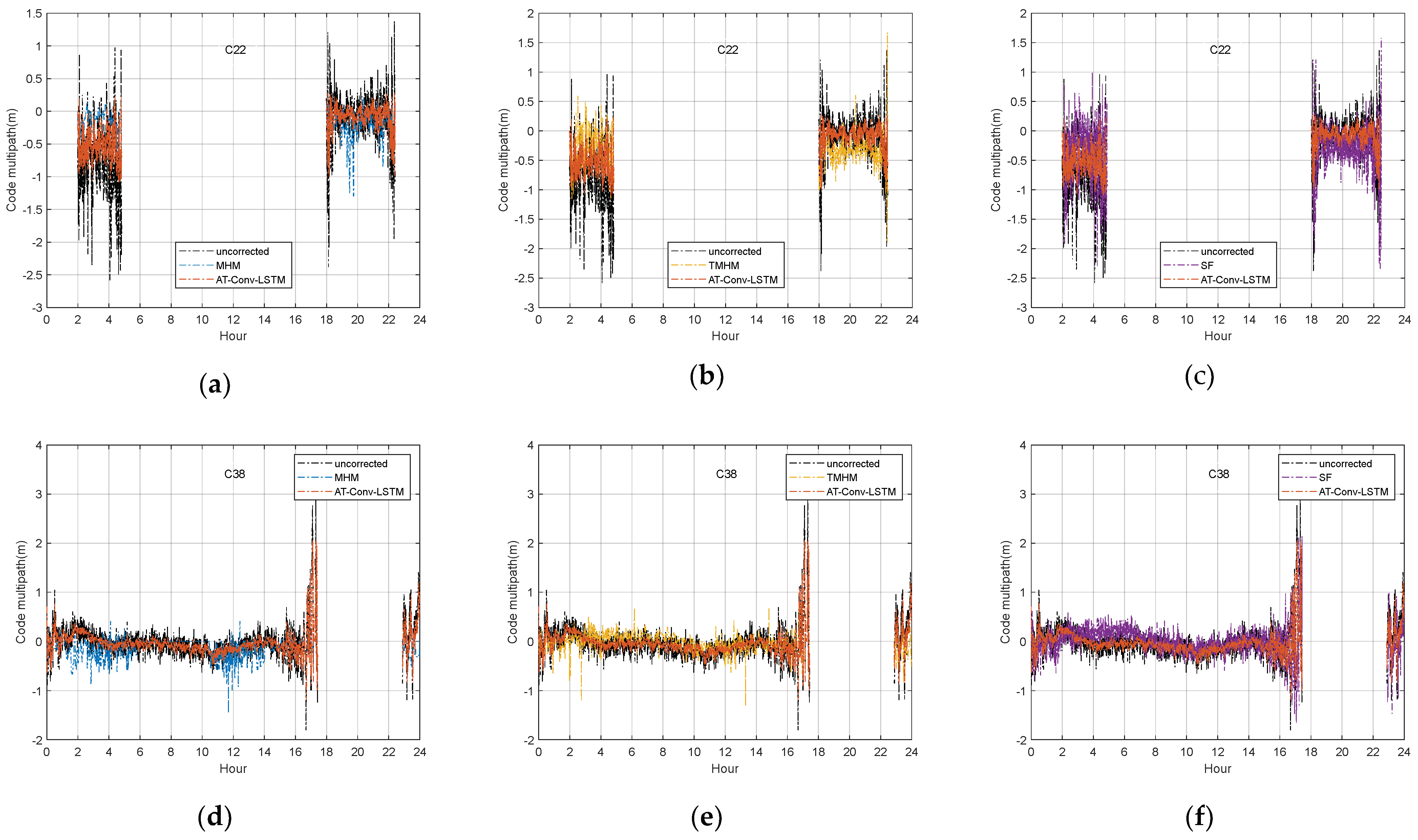
4.4. Comparison of AT-Conv-LSTM with Other Methods
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Dow, J.M.; Neilan, R.E.; Rizos, C. The International GNSS Service in a changing landscape of Global Navigation Satellite Systems. J. Geod. 2009, 83, 191–198. [Google Scholar] [CrossRef]
- Zhang, Z.; Li, Y.; He, X.; Hsu, L. Resilient GNSS real-time kinematic precise positioning with inequality and equality constraints. GPS Solut. 2023, 27, 116. [Google Scholar] [CrossRef]
- Zang, J.; Xu, C.; Li, X. Scaling earthquake magnitude in real time with high-rate GNSS peak ground displacement from variometric approach. GPS Solut. 2020, 24, 101. [Google Scholar] [CrossRef]
- Su, M.; Zheng, F.; Shang, J.; Qiao, L.; Qiu, Z.; Zhang, H. Influence of flooding on GPS carrier-to-noise ratio and water content variation analysis: A case study in Zhengzhou, China. GPS Solut. 2023, 27, 21. [Google Scholar] [CrossRef]
- Zhang, Z.; Li, Y.; He, X.; Chen, W.; Li, B. A composite stochastic model considering the terrain topography for real-time GNSS monitoring in canyon environments. J. Geod. 2022, 96, 79. [Google Scholar] [CrossRef]
- Seepersad, G.; Bisnath, S. Reduction of PPP convergence period through pseudorange multipath and noise mitigation. GPS Solut. 2015, 19, 369–379. [Google Scholar] [CrossRef]
- Lau, L.; Cross, P. Development and testing of a new ray-tracing approach to GNSS carrier-phase multipath modelling. J Geod. 2007, 81, 713–732. [Google Scholar] [CrossRef]
- Suzuki, T.; Matsuo, K.; Amano, Y. Rotating GNSS Antennas: Simultaneous LOS and NLOS Multipath Mitigation. GPS Solut. 2020, 24, 86. [Google Scholar] [CrossRef]
- Hsu, L.; Jan, S.; Groves, P.; Kubo, N. Multipath mitigation and NLOS detection using vector tracking in urban environments. GPS Solut. 2015, 19, 249–262. [Google Scholar] [CrossRef]
- Zhang, Z.; Yuan, H.; Li, B.; He, X.; Gao, S. Feasibility of easy-to-implement methods to analyze systematic errors of multipath, differential code bias, and inter-system bias for low-cost receivers. GPS Solut. 2021, 25, 116. [Google Scholar] [CrossRef]
- Luo, X.; Mayer, M.; Heck, B.; Awange, J. A realistic and easy-to-implement weighting model for GPS phase observations. IEEE Trans. Geosci. Remote Sens. 2014, 52, 6110–6118. [Google Scholar] [CrossRef]
- Zhang, Z. Code and phase multipath mitigation by using the observation-domain parameterization and its application in five-frequency GNSS ambiguity resolution. GPS Solut. 2021, 25, 144. [Google Scholar] [CrossRef]
- Yuan, H.; Zhang, Z.; He, X.; Dong, Y.; Zeng, J.; Li, B. Multipath mitigation in GNSS precise point positioning using multipath hierarchy for changing environments. GPS Solut. 2023, 27, 193. [Google Scholar] [CrossRef]
- Zhang, Z.; Li, B.; Gao, Y.; Shen, Y. Real-time carrier phase multipath detection based on dual-frequency C/N0 data. GPS Solut. 2019, 23, 7. [Google Scholar] [CrossRef]
- Genrich, J.F.; Bock, Y. Rapid resolution of crustal motion at short ranges with the Global Positioning System. J. Geophys. Res. Solid Earth. 1992, 97, 3261–3269. [Google Scholar] [CrossRef]
- Choi, K.; Bilich, A.; Larson, K.M.; Axelrad, P. Modified sidereal filtering: Implications for high-rate GPS positioning. Geophys Res. Lett. 2004, 31, 178–198. [Google Scholar] [CrossRef]
- Takasu, T. High-rate Precise Point Positioning: Detection of crustal deformation by using 1-Hz GPS data. In Proceedings of the GPS/GNSS Symposium 2006, Tokyo, Japan, 15–17 November 2006; pp. 1–8. [Google Scholar]
- Ragheb, A.E.; Clarke, P.J.; Edwards, S.J. GPS sidereal filtering: Coordinate- and carrier-phase-level strategies. J Geod. 2007, 81, 325–335. [Google Scholar] [CrossRef]
- Hung, H.K.; Rau, R.J. Surface waves of the 2011 Tohoku earthquake: Observations of Taiwan’s dense high-rate GPS network. J. Geophys. Res. Solid Earth 2013, 118, 332–345. [Google Scholar] [CrossRef]
- Atkins, C.; Ziebart, M. Effectiveness of observation-domain sidereal filtering for GPS precise point positioning. GPS Solut. 2016, 20, 111–122. [Google Scholar] [CrossRef]
- Cohen, C.E.; Parkinson, B.W. Mitigating multipath error in GPS based attitude determination. In Proceedings of the Advances in the Astronautical Sciences, AAS Guidance and Control Conference, San Diego, CA, USA, 2–6 February 1991; pp. 74–78. [Google Scholar]
- Fuhrmann, T.; Luo, X.; Knöpfer, A.; Mayer, M. Generating statistically robust multipath stacking maps using congruent cells. GPS Solut. 2015, 19, 83–92. [Google Scholar] [CrossRef]
- Dong, D.; Wang, M.; Chen, W.; Zeng, Z.; Song, L.; Zhang, Q.; Cai, M.; Cheng, Y.; Lv, J. Mitigation of multipath effect in GNSS short baseline positioning by the multipath hemispherical map. J. Geod. 2016, 90, 255–262. [Google Scholar] [CrossRef]
- Wang, Z.; Chen, W.; Dong, D.; Wang, M.; Cai, M.; Yu, C.; Zheng, Z.; Liu, M. Multipath mitigation based on trend surface analysis applied to dual-antenna receiver with common clock. GPS Solut. 2019, 23, 104. [Google Scholar] [CrossRef]
- Lu, R.; Chen, W.; Dong, D.; Wang, Z.; Zhang, C.; Peng, Y.; Yu, C. Multipath mitigation in GNSS precise point positioning based on trend-surface analysis and multipath hemispherical map. GPS Solut. 2021, 25, 119. [Google Scholar] [CrossRef]
- Lu, R.; Chen, W.; Zhang, C.; Li, L.; Peng, Y.; Zhang, Z. Characteristics of the BDS-3 multipath effect and mitigation methods using precise point positioning. GPS Solut. 2022, 26, 41. [Google Scholar] [CrossRef]
- Zhang, Z.; Dong, Y.; Wen, Y.; Luo, Y. Modeling, refinement and evaluation of multipath mitigation based on the hemispherical map in BDS2/BDS3 relative precise positioning. Measurement 2023, 213, 112722. [Google Scholar] [CrossRef]
- Kaselimi, M.; Voulodimos, A.; Doulamis, N.; Doulamis, A.; Delikaraoglou, D. Deep recurrent neural networks for ionospheric variations estimation using gnss measurements. IEEE Trans. Geosci. Remote Sens. 2021, 60, 1–15. [Google Scholar] [CrossRef]
- Li, Q.; Su, X.; Xie, X.; Tao, C.; Cui, J.; Chen, H.; Liu, Z. Accuracy Analysis of Error Compensation in the Ionospheric Model of BDS Broadcasting Based on ABC-BP Neural Network. In Proceedings of the China Satellite Navigation Conference (CSNC 2022), Lecture Notes in Electrical Engineering, Beijing, China, 25–27 May 2022; pp. 54–63. [Google Scholar] [CrossRef]
- Liu, C.; Yao, Y.; Xu, C. Conventional and neural network-based water vapor density model for GNSS troposphere tomography. GPS Solut. 2022, 26, 4. [Google Scholar] [CrossRef]
- Chen, H.; Niu, F.; Su, X.; Geng, T.; Liu, Z.; Li, Q. Initial Results of Modeling and Improvement of BDS-2/GPS Broadcast Ephemeris Satellite Orbit Based on BP and PSO-BP Neural Networks. Remote Sens. 2021, 13, 4801. [Google Scholar] [CrossRef]
- Zhao, L.; Li, N.; Li, H.; Wang, R.; Li, M. BDS satellite clock prediction considering periodic variations. Remote Sens. 2021, 13, 4058. [Google Scholar] [CrossRef]
- Kim, H.; Bae, T. Deep learning-based GNSS network-based real-time kinematic improvement for autonomous ground vehicle navigation. J. Sensors 2019, 2019, 3737265. [Google Scholar] [CrossRef]
- Taghizadeh, S.; Safabakhsh, R. An integrated INS/GNSS system with an attention-based hierarchical LSTM during GNSS outage. GPS Solut. 2023, 27, 71. [Google Scholar] [CrossRef]
- Min, D.; Kim, M.; Lee, J.; Circiu, M.S.; Meurer, M.; Lee, J. DNN-Based Approach to Mitigate Multipath Errors of Differential GNSS Reference Stations. IEEE T. Intell. Transp. 2022, 23, 25047–25053. [Google Scholar] [CrossRef]
- Erhan, D.; Bengio, Y.; Courville, A.; Manzagol, P.A.; Vincent, P.; Bengio, S. Why does unsupervised pre-training help deep learning? J. Mach. Learn. Res. 2010, 11, 625–660. [Google Scholar]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Polosukhin, I. Attention is All You Need. In Advances in Neural Information Processing Systems, Proceedings of the 31st Conference on Neural Information Processing Systems (NIPS 2017), Long Beach, California, USA, 4–9 December 2017; Curran Associates Inc.: Red Hook, NY, USA, 2017; pp. 6000–6010. [Google Scholar]
- Tang, J.; Li, Y.; Ding, M.; Liu, H.; Yang, D.; Wu, X. An Ionospheric TEC Forecasting Model Based on a CNN-LSTM-Attention Mechanism Neural Network. Remote Sens. 2022, 14, 2433. [Google Scholar] [CrossRef]
- Zheng, H.; Lin, F.; Feng, X.; Chen, Y. A Hybrid Deep Learning Model With Attention-Based Conv-LSTM Networks for Short-Term Traffic Flow Prediction. IEEE T. Intell. Transp. 2021, 22, 6910–6920. [Google Scholar] [CrossRef]
- Ruan, R.; Jia, X.; Feng, L. Analysis on BDS Satellite Internal Multipath and Its Impact on Wide-lane FCB Estimation. Acta Geod. Cartogr. Sin. 2017, 46, 961–970. [Google Scholar] [CrossRef]
- CSNO. The Application Service Architecture of BeiDou Navigation Satellite System (Version 1.0). Available online: http://en.beidou.gov.cn/SYSTEMS/Officialdocument/201812/P020181227424526837905.pdf (accessed on 15 June 2021).
- Zhang, Z.; Li, B.; Shen, Y.; Yang, L. A noise analysis method for GNSS signals of a standalone receiver. Acta Geod. Geophys. 2017, 52, 301–316. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | Strategies |
|---|---|
| Observations | BDS: B1/B3 |
| Sampling rate | 30 s |
| Elevation cutoff | 7° |
| Parameter estimator | Kalman filter |
| Satellite orbits and clocks | WHU MGEX precise orbit (5 min interval) and clock (30 s interval) products |
| Carrier phase windup | Corrected using the external model |
| Tidal load | Corrected using the IERS convention model |
| Relativity effects, Earth rotation | Corrected using the external model |
| Satellite and receiver antenna Phase center | Corrected with igs14.atx |
| Slant ionospheric delays | Estimated as random-walk noise parameters () |
| Tropospheric delays | The mapping function utilized for line of sight direction is global mapping function, zenith hydrostatic delays are corrected using the Saastamoinen model, zenith wet delays are estimated as random-walk noises () |
| Receiver clocks | Estimated as white noises |
| Phase ambiguities | Estimated as float constants |
| Station coordinates | Estimated as day constants |
| Stochastic model | Elevation-dependent weighting (prior variance as 0.003 and 0.3 m for code and phase observations) |
| BDS-3 System | B1I | B1C | B2a | B2b | B3I |
|---|---|---|---|---|---|
| Frequency (MHz) | 1561.098 | 1575.420 | 1176.450 | 1207.140 | 1268.520 |
| Chip Rate (Mcps) | 2.046 | 1.023 | 10.23 | 10.23 | 10.23 |
| Wavelength (cm) | 19.20 | 19.03 | 25.48 | 24.83 | 23.63 |
| Items | Strategies |
|---|---|
| Station Name | JFNG |
| Localization | China |
| Latitude | 30.51557° |
| Longitude | 114.49102° |
| Receiver | TRIMBLE ALLOY—6.20 |
| Antenna Type | TRM59800.00 |
| Constellations | GPS + GLO + GAL + BDS + QZSS + IRNSS + SBAS |
| PRN | Uncorrected | MHM-Corrected | T-MHM-Corrected | SF-Corrected | AT-Conv-LSTM-Corrected | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| MAE (m) | RMSE (m) | MAE (m) | RMSE (m) | MAE (m) | RMSE (m) | MAE (m) | RMSE (m) | MAE (m) | RMSE (m) | |
| C22 | 0.3322 | 0.5596 | 0.1581 | 0.6154 | 0.0143 | 0.5731 | 0.0050 | 0.6608 | 0.0681 | 0.4447 |
| C23 | 0.3322 | 0.5596 | 0.1797 | 0.6175 | 0.0143 | 0.5731 | 0.0050 | 0.6608 | 0.0681 | 0.4747 |
| C36 | 0.3620 | 0.3809 | 0.1827 | 0.4225 | 0.0529 | 0.2952 | 0.0587 | 0.5641 | 0.0812 | 0.3615 |
| C38 | 0.0340 | 0.3364 | 0.1106 | 0.3932 | 0.0020 | 0.3588 | 0.0340 | 0.3364 | 0.0480 | 0.4118 |
| C39 | 0.0614 | 0.2766 | 0.0505 | 0.3501 | 0.0191 | 0.2686 | 0.0447 | 0.3514 | 0.0241 | 0.2386 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, J.; Tang, Z.; Zhou, C.; Wei, J. Characterization of BDS Multipath Effect Based on AT-Conv-LSTM Network. Remote Sens. 2024, 16, 73. https://doi.org/10.3390/rs16010073
Sun J, Tang Z, Zhou C, Wei J. Characterization of BDS Multipath Effect Based on AT-Conv-LSTM Network. Remote Sensing. 2024; 16(1):73. https://doi.org/10.3390/rs16010073
Chicago/Turabian StyleSun, Jie, Zuping Tang, Chuang Zhou, and Jiaolong Wei. 2024. "Characterization of BDS Multipath Effect Based on AT-Conv-LSTM Network" Remote Sensing 16, no. 1: 73. https://doi.org/10.3390/rs16010073
APA StyleSun, J., Tang, Z., Zhou, C., & Wei, J. (2024). Characterization of BDS Multipath Effect Based on AT-Conv-LSTM Network. Remote Sensing, 16(1), 73. https://doi.org/10.3390/rs16010073