

Identifying Old-Growth Forests in Complex Landscapes: A New LiDAR-Based Estimation Framework and Conservation Implications



Abstract
:
1. Introduction
- (1)
- Use LiDAR to map old-growth forests across a large topographically complex landscape;
- (2)
- Determine the proportion of the landscape that is multi-aged;
- (3)
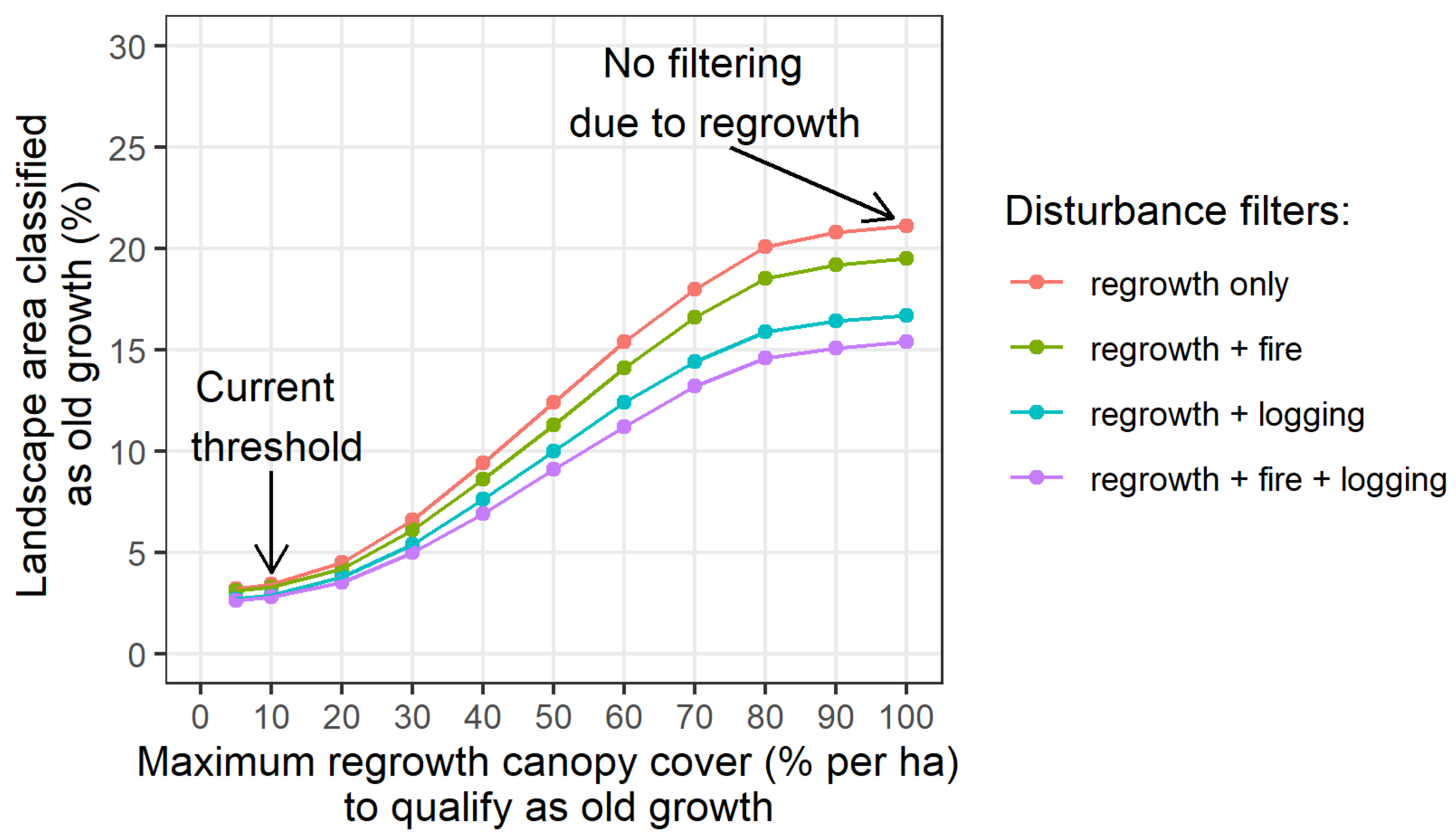
- Run a sensitivity analysis on the impact of the old-growth definition on the proportion of landscape that is classified as old growth;
- (4)
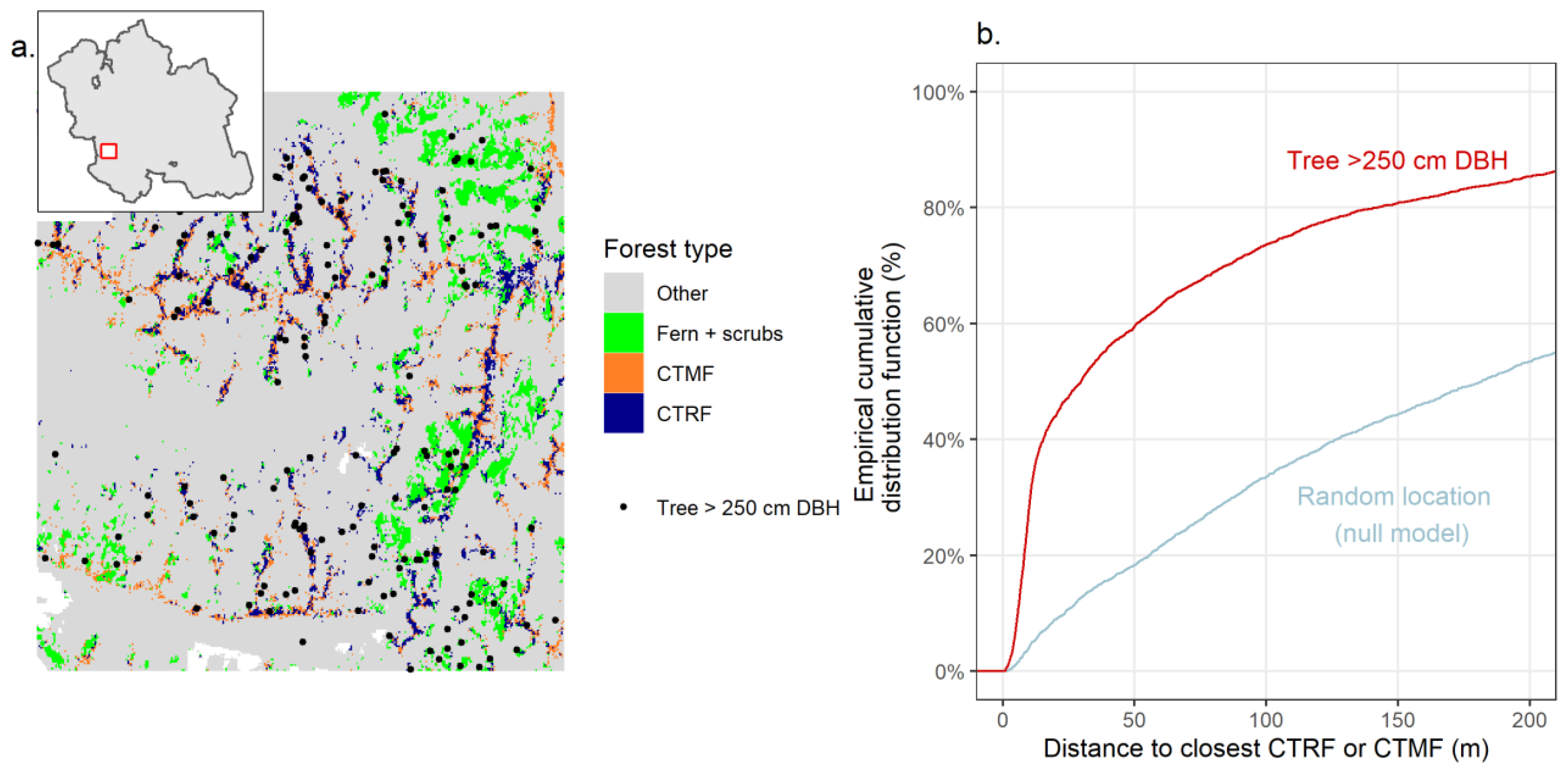
- Quantify the presence of giant trees (>250 cm diameter at breast height, DBH) and their proximity to cool temperate rainforest and cool temperate mixed forests.
2. Material and Methods
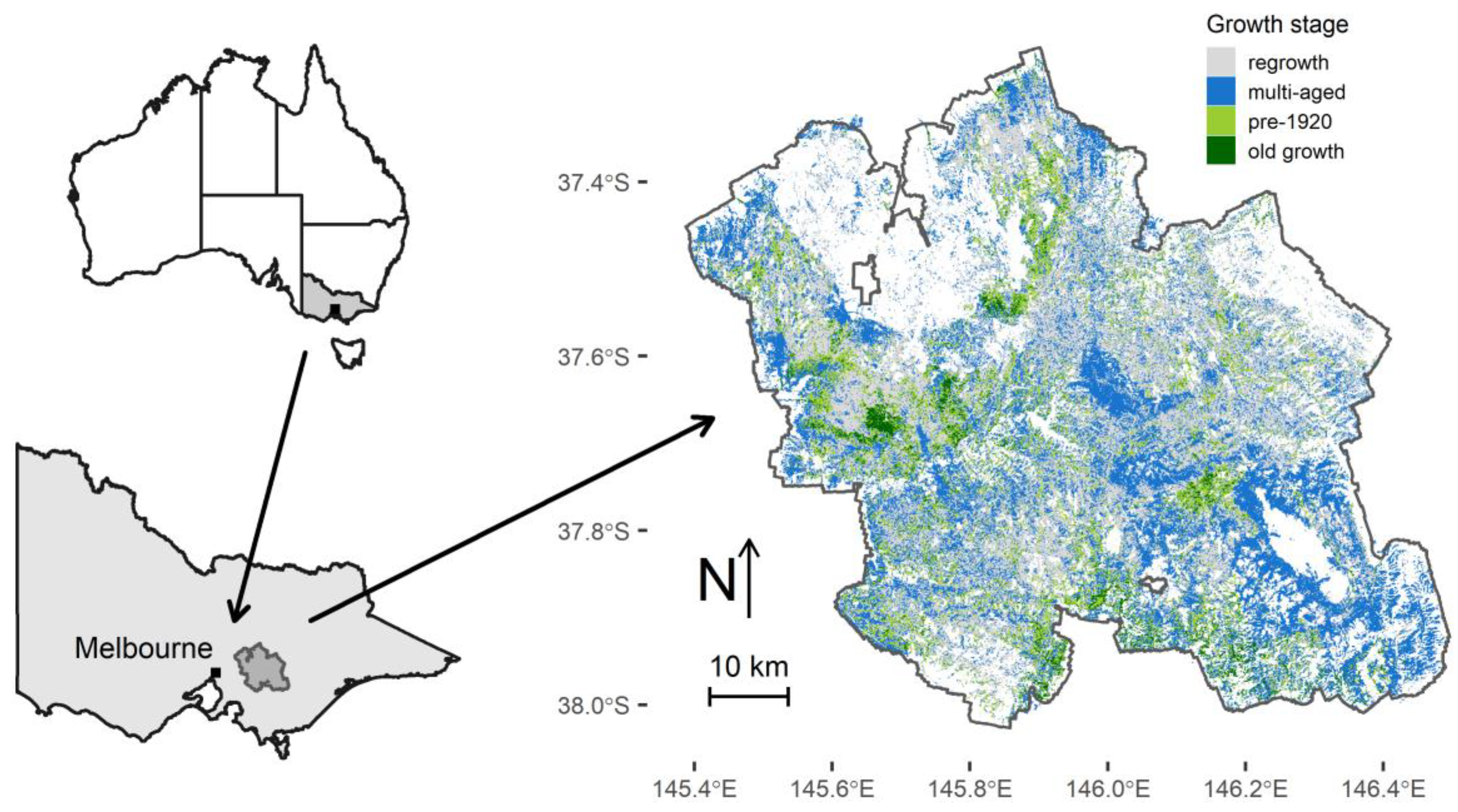
2.1. Study Region
2.2. Binary Classification of Old-Growth Forests
3. Results
3.1. Validating our Refined Watershed-ITD Algorithm for Eucalyptus Forest Applications
3.2. Old Growth Map Validation
3.3. Old-Growth Forest Varies in Abundance across Ecological Vegetation Classes
3.4. Regrowth Threshold and Disturbance Filters have a Large Impact on the Extent of Old-Growth Forest
3.5. Giant Trees Are Located Close to Cool Temperate Rainforests and Cool Temperate Mixed Forests
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Blicharska, M.; Mikusinski, G. Incorporating Social and Cultural Significance of Large Old Trees in Conservation Policy. Conserv. Biol. 2014, 28, 1558–1567. [Google Scholar] [CrossRef] [PubMed]
- Luyssaert, S.; Schulze, E.-D.; Börner, A.; Knohl, A.; Hessenmöller, D.; Law, B.; Ciais, P.; Grace, J. Old-growth forests as global carbon sinks. Nature 2008, 455, 213–215. [Google Scholar] [CrossRef] [PubMed]
- Watson, J.E.M.; Evans, T.; Venter, O.; Williams, B.; Tulloch, A.; Stewart, C.; Thompson, I.; Ray, J.C.; Murray, K.; Salazar, A.; et al. The exceptional value of intact forest ecosystems. Nat. Ecol. Evol. 2018, 2, 599–610. [Google Scholar] [CrossRef] [PubMed]
- Martin-Benito, D.; Pederson, N.; Férriz, M.; Gea-Izquierdo, G. Old forests and old carbon: A case study on the stand dynamics and longevity of aboveground carbon. Sci. Total Environ. 2021, 765, 142737. [Google Scholar] [CrossRef] [PubMed]
- Keenan, R.J.; Read, S.M. Assessment and management of old-growth forests in south eastern Australia. Plant Biosyst.—Int. J. Deal. All Asp. Plant Biol. 2012, 146, 214–222. [Google Scholar] [CrossRef]
- Lindenmayer, D.B. Old forest, new perspectives—Insights from the Mountain Ash forests of the Central Highlands of Victoria, south-eastern Australia. For. Ecol. Manag. 2009, 258, 357–365. [Google Scholar] [CrossRef]
- Lindenmayer, D.B.; Cunningham, R.; Donnelly, C.; Franklin, J. Structural features of old-growth Australian montane ash forests. For. Ecol. Manag. 2000, 134, 189–204. [Google Scholar] [CrossRef]
- Baker, S.C.; Kasel, S.; van Galen, L.G.; Jordan, G.J.; Nitschke, C.R.; Pryde, E.C. Identifying regrowth forests with advanced mature forest values. For. Ecol. Manag. 2019, 433, 73–84. [Google Scholar] [CrossRef]
- Wirth, C.; Messier, C.; Bergeron, Y.; Frank, D.; Fankhänel, A. Old-growth forest definitions: A pragmatic view. In Old-Growth Forests; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Woodgate, P.W.; Peel, B.; Coram, J.; Farrell, S.; Ritman, K.; Lewis, A. Old-growth forest studies in Victoria, Australia Concepts and principles. For. Ecol. Manag. 1996, 85, 79–94. [Google Scholar] [CrossRef]
- Spies, T.A. Ecological concepts and diversity of old-growth forests. J. For. 2004, 102, 14–20. [Google Scholar]
- Oliver, C.D.; Larson, B.A. Forest Stand Dynamics; Yale School of the Environment: New York, NY, USA, 1996. [Google Scholar]
- Woodgate, P.W. A Study of the Old-Growth Forests of East Gippsland; Department of Conservation and Natural Resources: Melbourne, VIC, Australia, 1994. [Google Scholar]
- Burgman, M.A. Characterisation and delineation of the eucalypt old-growth forest estate in Australia: A review. For. Ecol. Manag. 1996, 83, 149–161. [Google Scholar] [CrossRef]
- Turner, P.A.M.; Balmer, J.; Kirkpatrick, J.B. Stand-replacing wildfires?: The incidence of multi-cohort and single-cohort Eucalyptus regnans and E. obliqua forests in southern Tasmania. For. Ecol. Manag. 2009, 258, 366–375. [Google Scholar] [CrossRef]
- Lindenmayer, D.; Taylor, C. Extensive recent wildfires demand more stringent protection of critical old growth forest. J. Pac. Conserv. Biol. 2020, 26, 384–394. [Google Scholar] [CrossRef]
- Ashton, D.H. The Big Ash forest, Wallaby Creek, Victoria; changes during one lifetime. Aust. J. Bot. 2000, 48, 1–26. [Google Scholar] [CrossRef]
- Simkin, R.; Baker, P.J. Disturbance history and stand dynamics in tall open forest and riparian rainforest in the Central Highlands of Victoria. Austral Ecol. 2008, 33, 747–760. [Google Scholar] [CrossRef]
- Fedrigo, M.; Stewart, S.B.; Kasel, S.; Levchenko, V.; Trouvé, R.; Nitschke, C.R. Radiocarbon dating informs tree fern population dynamics and disturbance history of temperate forests in southeast Australia. Radiocarbon 2018, 61, 445–460. [Google Scholar] [CrossRef]
- Australian and New Zealand Environment and Conservation Council; Australia Ministerial Council on Forestry, Fisheries and Aquaculture. Nationally Agreed Criteria for the Establishment of a Comprehensive, Adequate and Representative Reserve System for Forests in Australia; Joint Australian and New Zealand Environment and Conservation Council/Ministerial Council on Forestry: Canberra, ACT, Australia, 1997; p. 22. [Google Scholar]
- Collins, L.; Clarke, H.; Clarke, M.F.; Gausden, S.C.M.; Nolan, R.H.; Penman, T.; Bradstock, R. Warmer and drier conditions have increased the potential for large and severe fire seasons across south-eastern Australia. Glob. Ecol. Biogeogr. 2022, 31, 1933–1948. [Google Scholar] [CrossRef]
- Lim, K.; Treitz, P.; Wulder, M.; St-Onge, B.; Flood, M. LiDAR remote sensing of forest structure. Prog. Phys. Geogr. Earth Environ. 2003, 27, 88–106. [Google Scholar] [CrossRef]
- Næsset, E. Predicting forest stand characteristics with airborne scanning laser using a practical two-stage procedure and field data. Remote Sens. Environ. 2002, 80, 88–99. [Google Scholar] [CrossRef]
- Coops, N.C.; Tompalski, P.; Goodbody, T.R.; Queinnec, M.; Luther, J.E.; Bolton, D.K.; White, J.C.; Wulder, M.A.; van Lier, O.R.; Hermosilla, T. Modelling lidar-derived estimates of forest attributes over space and time: A review of approaches and future trends. Remote Sens. Environ. 2021, 260, 112477. [Google Scholar] [CrossRef]
- Hevia, A.; Calzado, A.; Alejano, R.; Vázquez-Piqué, J. Identification of old-growth Mediterranean forests using airborne laser scanning and geostatistical analysis. Remote Sens. 2022, 14, 4040. [Google Scholar] [CrossRef]
- Barros, L.A.; Elkin, C. An index for tracking old-growth value in disturbance-prone forest landscapes. Ecol. Indic. 2021, 121, 107175. [Google Scholar] [CrossRef]
- Spracklen, B.; Spracklen, D.V. Determination of Structural Characteristics of Old-Growth Forest in Ukraine Using Spaceborne LiDAR. Remote Sens. 2021, 13, 1233. [Google Scholar] [CrossRef]
- Martin, M.; Valeria, O. “Old” is not precise enough: Airborne laser scanning reveals age-related structural diversity within old-growth forests. Remote Sens. Environ. 2022, 278, 113098. [Google Scholar] [CrossRef]
- Fuhr, M.; Lalechère, E.; Monnet, J.; Bergès, L. Detecting overmature forests with airborne laser scanning (ALS). Remote Sens. Ecol. Conserv. 2022, 8, 731–743. [Google Scholar] [CrossRef]
- Hirschmugl, M.; Sobe, C.; Di Filippo, A.; Berger, V.; Kirchmeir, H.; Vandekerkhove, K. Review on the possibilities of mapping old-growth temperate forests by remote sensing in Europe. Environ. Model. Assess. 2023, 28, 761–785. [Google Scholar] [CrossRef]
- Sverdrup-Thygeson, A.; Ørka, H.O.; Gobakken, T.; Næsset, E. Can airborne laser scanning assist in mapping and monitoring natural forests? For. Ecol. Manag. 2016, 369, 116–125. [Google Scholar] [CrossRef]
- van der Ploeg, T.; Austin, P.C.; Steyerberg, E.W. Modern modelling techniques are data hungry: A simulation study for predicting dichotomous endpoints. BMC Med. Res. Methodol. 2014, 14, 137. [Google Scholar] [CrossRef]
- Gill, A.M. Eucalyptus and fires: Interdependent or independent? In Eucalypt Ecology: Individuals to Ecosystems; Williams, J.E., Woinarski, J.C.Z., Eds.; Cambridge University Press: Cambridge, UK, 1997; pp. 151–167. [Google Scholar]
- Crisp, M.D.; Burrows, G.E.; Cook, L.G.; Thornhill, A.H.; Bowman, D.M.J.S. Flammable biomes dominated by eucalypts originated at the Cretaceous–Palaeogene boundary. Nat. Commun. 2011, 2, 193. [Google Scholar] [CrossRef]
- Berry, L.E.; Driscoll, D.A.; Banks, S.C.; Lindenmayer, D.B. The use of topographic fire refuges by the greater glider (Petauroides volans) and the mountain brushtail possum (Trichosurus cunninghami) following a landscape-scale fire. J. Aust. Mammal. 2015, 37, 39–45. [Google Scholar] [CrossRef]
- Trouvé, R.; Jiang, R.; Fedrigo, M.; White, M.D.; Kasel, S.; Baker, P.J.; Nitschke, C.R. Combining Environmental, Multispectral, and LiDAR Data Improves Forest Type Classification: A Case Study on Mapping Cool Temperate Rainforests and Mixed Forests. Remote Sens. Environ. 2023, 15, 60. [Google Scholar] [CrossRef]
- DEECA. 2015-16 Central Highlands LiDAR Project. Department of Energy, Environment and Climate Action. 2016. Available online: https://dev-metashare.maps.vic.gov.au/geonetwork/srv/eng/catalog.search#/metadata/c68b1084-e8f3-5c9c-851b-b58f32f1c9a5. (accessed on 10 October 2023).
- Jiang, R. Using LiDAR for Landscape-Scale Mapping of Potential Habitat for the Critically Endangered Leadbeater’s Possum, in School of Ecosystem and Forest Sciences. Ph.D. thesis, The University of Melbourne, Victoria, VIC, Australia, 2019. [Google Scholar]
- Kwak, D.-A.; Lee, W.-K.; Lee, J.-H.; Biging, G.S.; Gong, P. Detection of individual trees and estimation of tree height using LiDAR data. J. For. Res. 2007, 12, 425–434. [Google Scholar] [CrossRef]
- Amiri, N. Assessment of Marker-Controlled Watershed Segmentation Algorithm for Individual Tree Top Detection and Crown Delineation. Master’s Thesis, University of Twente, Enschede, The Netherlands, 2014. [Google Scholar]
- Kalapala, M.; Rao, V.S.; Srinivas, K. Robust Tree Crown Delineation using Novel Marker Controlled Watershed Segmentation Algorithm. Int. J. Eng. Res. Technol. 2012, 1, 7. [Google Scholar]
- Ayrey, E.; Fraver, S.; Kershaw, J.A., Jr.; Kenefic, L.S.; Hayes, D.; Weiskittel, A.R.; Roth, B.E. Layer Stacking: A Novel Algorithm for Individual Forest Tree Segmentation from LiDAR Point Clouds. Can. J. Remote Sens. 2017, 43, 16–27. [Google Scholar] [CrossRef]
- Ma, K.; Chen, Z.; Fu, L.; Tian, W.; Jiang, F.; Yi, J.; Du, Z.; Sun, H. Performance and sensitivity of individual tree segmentation methods for UAV-LiDAR in multiple forest types. Remote Sens. 2022, 14, 298. [Google Scholar] [CrossRef]
- Wu, B.; Yu, B.; Wu, Q.; Huang, Y.; Chen, Z.; Wu, J. Individual tree crown delineation using localized contour tree method and airborne LiDAR data in coniferous forests. Int. J. Appl. Earth Obs. Geoinf. 2016, 52, 82–94. [Google Scholar] [CrossRef]
- Dalponte, M.; Coomes, D.A. Tree-centric mapping of forest carbon density from airborne laser scanning and hyperspectral data. Methods Ecol. Evol. 2016, 7, 1236–1245. [Google Scholar] [CrossRef]
- Jiang, R. Individual Tree Delineation in Broadleaf Forest. 2023. Available online: https://github.com/ruizhuj/Individual_Tree_Delineation_in_Broadleaf_forest/blob/main/README.md (accessed on 21 August 2023).
- Trouvé, R.; Nitschke, C.R.; Robinson, A.P.; Baker, P.J. Estimating the self-thinning line from mortality data. For. Ecol. Manag. 2017, 402, 122–134. [Google Scholar] [CrossRef]
- Nitschke, C.R.; Nichols, S.; Allen, K.; Dobbs, C.; Livesley, S.J.; Baker, P.J.; Lynch, Y. The influence of climate and drought on urban tree growth in southeast Australia and the implications for future growth under climate change. Landsc. Urban Plan. 2017, 167, 275–287. [Google Scholar] [CrossRef]
- Chick, R.; Molloy, J. Forest Protection Survey Program, Survey Guideline, Coupe Habitat and Sign Survey (V4); Department of Energy, Environment and Climate Action (DEECA): Melbourne, VIC, Australia, 2020; p. 10. [Google Scholar]
- Kuhn, M. Building predictive models in R using the caret package. J. Stat. Softw. 2008, 28, 1–26. [Google Scholar] [CrossRef]
- Landis, J.R.; Koch, G.G. The Measurement of Observer Agreement for Categorical Data. Biometrics 1977, 1, 159–174. [Google Scholar] [CrossRef]
- Allouche, O.; Asaf, T.; Ronen, R. Assessing the accuracy of species distribution models: Prevalence, Kappa and the True Skill Statistic (TSS). J. Appl. Ecol. 2006, 43, 1223–1232. [Google Scholar] [CrossRef]
- Foody, G.M. Explaining the unsuitability of the kappa coefficient in the assessment and comparison of the accuracy of thematic maps obtained by image classification. Remote Sens. Environ. 2020, 239, 111630. [Google Scholar] [CrossRef]
- Fairman, T.A.; Nitschke, C.R.; Bennett, L.T. Too much, too soon? A review of the effects of increasing wildfire frequency on tree mortality and regeneration in temperate eucalypt forests. Int. J. Wildland Fire 2016, 25, 831–848. [Google Scholar] [CrossRef]
- Orwig, D.A.; Abrams, M.D. Impacts of Early Selective Logging on the Dendroecology of an Old-Growth, Bottomland Hemlock-White Pine-Northern Hardwood Forest on the Allegheny Plateau. J. Torrey Bot. Soc. 1999, 126, 234–244. [Google Scholar] [CrossRef]
- Ding, Y.; Zang, R.; Lu, X.; Huang, J. The impacts of selective logging and clear-cutting on woody plant diversity after 40years of natural recovery in a tropical montane rain forest, south China. Sci. Total Environ. 2017, 579, 1683–1691. [Google Scholar] [CrossRef] [PubMed]
- DEECA. Old Growth Forest Identification Assessment Tool; Department of Energy, Environment and Climate Action, Conservation Regulator: Melbourne, VIC, Australia, 2020. [Google Scholar]
- McCarthy, M.A.; Malcolm Gill, A.; Lindenmayer, D.B. Fire regimes in mountain ash forest: Evidence from forest age structure, extinction models and wildlife habitat. For. Ecol. Manag. 1999, 124, 193–203. [Google Scholar] [CrossRef]
- Nitschke, C.R.; Trouvé, R.; Lumsden, L.F.; Bennett, L.T.; Fedrigo, M.; Robinson, A.P.; Baker, P.J. Spatial and temporal dynamics of habitat availability and stability for a critically endangered arboreal marsupial: Implications for conservation planning in a fire-prone landscape. Landsc. Ecol. 2020, 35, 1553–1570. [Google Scholar] [CrossRef]
- Nitschke, C.R.; Innes, J.L. Potential effect of climate change on observed fire regimes in the Cordilleran forests of South-Central Interior, British Columbia. Clim. Change 2013, 116, 579–591. [Google Scholar] [CrossRef]
- Keenan, R.J.; Nitschke, C. Forest management options for adaptation to climate change: A case study of tall, wet eucalypt forests in Victoria’s Central Highlands region. Aust. For. 2016, 79, 96–107. [Google Scholar] [CrossRef]
- Trouvé, R.; Oborne, L.; Baker, P.J. The effect of species, size, and fire intensity on tree mortality within a catastrophic bushfire complex. Ecol. Appl. 2021, 31, e2383. [Google Scholar] [CrossRef] [PubMed]
- Barros, L.A.; Venter, M.; Elkin, C.; Venter, O. Managing forests for old-growth attributes better promotes the provision of ecosystem services than current age-based old-growth management. For. Ecol. Manag. 2022, 511, 120130. [Google Scholar] [CrossRef]
- McCarter, J.B.; Wilson, J.S.; Baker, P.J.; Moffett, J.L.; Oliver, C.D. Landscape management through integration of existing tools and emerging technologies. J. For. 1998, 96, 17–23. [Google Scholar]
- Berry, L.E.; Driscoll, D.A.; Stein, J.A.; Blanchard, W.; Banks, S.C.; Bradstock, R.A.; Lindenmayer, D.B. Identifying the location of fire refuges in wet forest ecosystems. Ecol. Appl. 2015, 25, 2337–2348. [Google Scholar] [CrossRef] [PubMed]
- Tng, D.Y.P.; Williamson, G.J.; Jordan, G.J.; Bowman, D.M.J.S. Giant eucalypts—globally unique fire-adapted rain-forest trees? New Phytol. 2012, 196, 1001–1014. [Google Scholar] [CrossRef] [PubMed]
- Dalponte, M.; Orka, H.O.; Ene, L.T.; Gobakken, T.; Naesset, E. Tree crown delineation and tree species classification in boreal forests using hyperspectral and als data. Remote Sens. Environ. 2014, 140, 306–317. [Google Scholar] [CrossRef]
- Wang, L.; Gong, P.; Biging, G.S. Individual tree-crown delineation and treetop detection in high-spatial-resolution aerial imagery. Photogramm. Eng. Remote Sens. 2004, 70, 351–357. [Google Scholar] [CrossRef]
- Popescu, S.C.; Wynne, R.H.; Nelson, R.F. Estimating plot-level tree heights with lidar: Local filtering with a canopy-height based variable window size. Comput. Electron. Agric. 2002, 37, 71–95. [Google Scholar] [CrossRef]
- Soille, P. Morphological Image Analysis: Principles and Applications; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Ke, Y.H.; Quackenbush, L.J. A review of methods for automatic individual tree-crown detection and delineation from passive remote sensing. Int. J. Remote Sens. 2011, 32, 4725–4747. [Google Scholar] [CrossRef]
- Rahman, M.; Gorte, B.; Bucksch, A. A new method for individual tree measurement from airborne lidar. In Proceedings of the SilviLaser 2009, College Station, TX, USA, 14–16 October 2009. [Google Scholar]
- Rahman, M.A.; Gorte, B. Individual tree detection based on densities of high points of high resolution airborne lidar. In Proceedings of the GEOBIA 2008, Calgary, AB, Canada, 5–8 August 2008; pp. 350–355. [Google Scholar]
- Rahman, M.; Gorte, B. Tree crown delineation from high resolution airborne lidar based on densities of high points. ISPRS 2009, XXXVIII, 123–128. [Google Scholar]
- Ritchie, M.W.; Hann, D.W. Equations for Predicting Height to Crown Base for Fourteen Tree Species in Southwest Oregon; Forest Research Laboratory, College of Forestry, Oregon State University: Corvallis, OR, USA, 1987. [Google Scholar]
- Nutto, L.; Spathelf, P.; Seling, I. Management of individual tree diameter growth and implications for pruning for brazilian eucalyptus grandis hill ex maiden. Floresta 2006, 36, 397–413. [Google Scholar] [CrossRef]
- Rijal, B.; Weiskittel, A.R.; Kershaw, J.A. Development of height to crown base models for thirteen tree species of the north american acadian region. For. Chron. 2012, 88, 60–73. [Google Scholar] [CrossRef]
- Sharma, R.P.; Vacek, Z.; Vacek, S.; Podrázský, V.; Jansa, V. Modelling individual tree height to crown base of norway spruce (Picea abies (L.) karst.) and european beech (Fagus sylvatica L.). PLoS ONE 2017, 12, e0186394. [Google Scholar] [CrossRef] [PubMed]
- Persson, A.; Holmgren, J.; Söderman, U. Detecting and measuring individual trees using an airborne laser scanner. Photogramm. Eng. Remont Sens. 2002, 68, 925–932. [Google Scholar]
- Wulder, M.; Niemann, K.O.; Goodenough, D.G. Local maximum filtering for the extraction of tree locations and basal area from high spatial resolution imagery. Remote Sens. Environ. 2000, 73, 103–114. [Google Scholar] [CrossRef]
- Popescu, S.C.; Wynne, R.H. Seeing the trees in the forest. Photogramm. Eng. Remote Sens. 2004, 70, 589–604. [Google Scholar] [CrossRef]
- Brandtberg, T.; Walter, F. Automated delineation of individual tree crowns in high spatial resolution aerial images by multiple-scale analysis. Mach. Vis. Appl. 1998, 11, 64–73. [Google Scholar] [CrossRef]
- Dralle, K.; Rudemo, M. Stem number estimation by kernel smoothing of aerial photos. Can. J. For. Res. 1996, 26, 1228–1236. [Google Scholar] [CrossRef]
- Xu, X.; Iuricich, F.; De Floriani, L. A topology-based approach to individual tree segmentation from airborne lidar data. GeoInformatica 2023, 27, 759–788. [Google Scholar] [CrossRef]
- Sačkov, I.; Hlásny, T.; Bucha, T.; Juriš, M. Integration of tree allometry rules to treetops detection and tree crowns delineation using airborne lidar data. Iforest-Biogeosci. For. 2017, 10, 459. [Google Scholar] [CrossRef]
- Roussel, J.-R.; Auty, D.; Coops, N.C.; Tompalski, P.; Goodbody, T.R.; Meador, A.S.; Bourdon, J.-F.; De Boissieu, F.; Achim, A. Lidr: An r package for analysis of airborne laser scanning (als) data. Remote Sens. Environ. 2020, 251, 112061. [Google Scholar] [CrossRef]
- Huisman, J.; Olff, H.; Fresco, L.F.M. A hierarchical set of models for species response analysis. J. Veg. Sci. 1993, 4, 37–46. [Google Scholar] [CrossRef]
- Ashton, D. The development of even-aged stands of eucalyptus regnans f. Muell. In central victoria. Aust. J. Bot. 1976, 24, 397–414. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Simplified Growth Stage | Definition |
|---|---|
| Old growth | The stand has at least one pre-1900 cohort and there is no visible disturbance trace. This means less than 10% regrowth crown cover (i.e., trees that were established after 1900), and being outside the footprint of fire (canopy burn and crown scorch) and logging disturbances is defined using GIS layers. This old growth stage is referred to as modelled old growth (MOG-2022) in this study. |
| Multi-aged | Stands with several cohorts that may or may not be ecologically mature. |
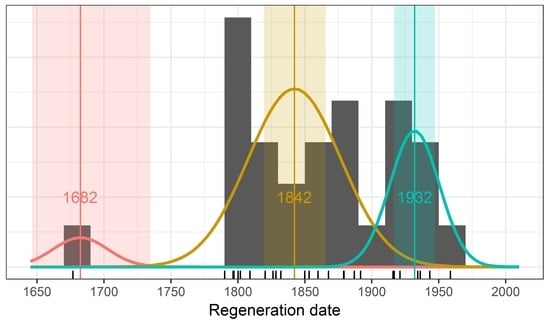
| Pre-1920 | Single cohort stands that regenerated between 1900 and 1920 and that have the potential to be next-generation old growth. |
| Regrowth | Single cohort stands that regenerated after 1920. |
| Field Validation (Observed) | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| 0 | 1 | Kappa | Sensitivity | Specificity | Precision | TSS 1 | |||
| Predicted | MOG-2022 | 0 | 42 | 4 | 0.56 | 0.43 | 1.00 | 1.00 | 0.43 |
| 1 | 0 | 3 | |||||||
| MOG-2009 | 0 | 36 | 5 | 0.13 | 0.27 | 0.86 | 0.25 | 0.13 | |
| 1 | 6 | 2 | |||||||
| Simplified Growth Stage | ||||||
|---|---|---|---|---|---|---|
| EVC (ha) | Regrowth | Multi-Aged | Pre-1920 | Old Growth | Total (ha) | Total (%) |
| EVC 29: damp forest | 44,033 | 41,558 | 11,316 | 1726 | 98,633 | 29.2 |
| EVC 30: wet forest | 48,432 | 28,891 | 16,878 | 3678 | 97,879 | 29.0 |
| EVC 39: montane Wet Forest | 16,981 | 15,257 | 6396 | 1173 | 39,807 | 11.8 |
| EVC 23: herb-rich foothill forest | 12,404 | 9859 | 1384 | 112 | 23,759 | 7.0 |
| EVC 45: Shrubby Foothill Forest | 6425 | 10,654 | 1136 | 158 | 18,373 | 5.4 |
| EVC 18: riparian forest | 6414 | 4990 | 3762 | 1081 | 16,247 | 4.8 |
| EVC 38: montane damp forest | 9694 | 5027 | 1153 | 83 | 15,957 | 4.7 |
| EVC 31: cool temperate rainforest | 3961 | 2418 | 3337 | 965 | 10,681 | 3.2 |
| Others EVCs | 6835 | 7359 | 1740 | 278 | 16,212 | 4.8 |
| Total (ha) | 154,898 | 125,959 | 47,102 | 9589 | 337,548 | |
| Total (%) | 46.0 | 37.3 | 14.0 | 2.7 | 100.0 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Trouvé, R.; Jiang, R.; Baker, P.J.; Kasel, S.; Nitschke, C.R. Identifying Old-Growth Forests in Complex Landscapes: A New LiDAR-Based Estimation Framework and Conservation Implications. Remote Sens. 2024, 16, 147. https://doi.org/10.3390/rs16010147
Trouvé R, Jiang R, Baker PJ, Kasel S, Nitschke CR. Identifying Old-Growth Forests in Complex Landscapes: A New LiDAR-Based Estimation Framework and Conservation Implications. Remote Sensing. 2024; 16(1):147. https://doi.org/10.3390/rs16010147
Chicago/Turabian StyleTrouvé, Raphaël, Ruizhu Jiang, Patrick J. Baker, Sabine Kasel, and Craig R. Nitschke. 2024. "Identifying Old-Growth Forests in Complex Landscapes: A New LiDAR-Based Estimation Framework and Conservation Implications" Remote Sensing 16, no. 1: 147. https://doi.org/10.3390/rs16010147
APA StyleTrouvé, R., Jiang, R., Baker, P. J., Kasel, S., & Nitschke, C. R. (2024). Identifying Old-Growth Forests in Complex Landscapes: A New LiDAR-Based Estimation Framework and Conservation Implications. Remote Sensing, 16(1), 147. https://doi.org/10.3390/rs16010147