
3D Landslide Monitoring in High Spatial Resolution by Feature Tracking and Histogram Analyses Using Laser Scanners



Abstract
:1. Introduction
- Reducing the errors caused by the matching process, especially in the border sections of the point cloud, by histogram analysis;
- Maintaining proper distribution of vectors throughout the study areas;
- Using various data to check the performance of the presented method more precisely. These data sets are different in size, type of deformation, density of point clouds, and direction of displacement;
- Evaluation of the accuracy of the presented method using the available data.
2. Literature Review
2.1. Global Navigation Satellite System (GNSS)
2.2. Image-Based Monitoring
2.3. Terrestrial Laser Scanners
3. Materials and Methods
3.1. Study Areas
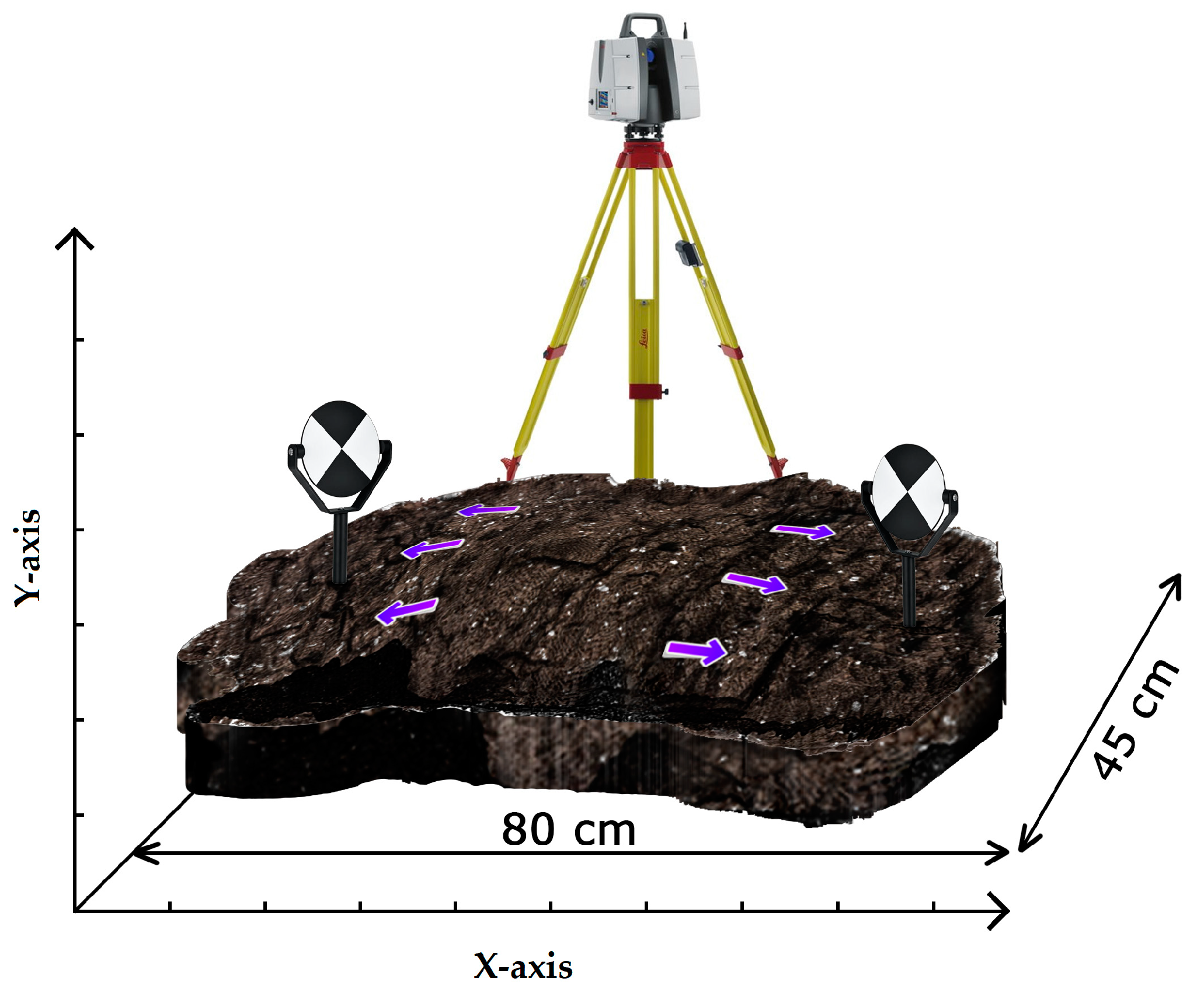
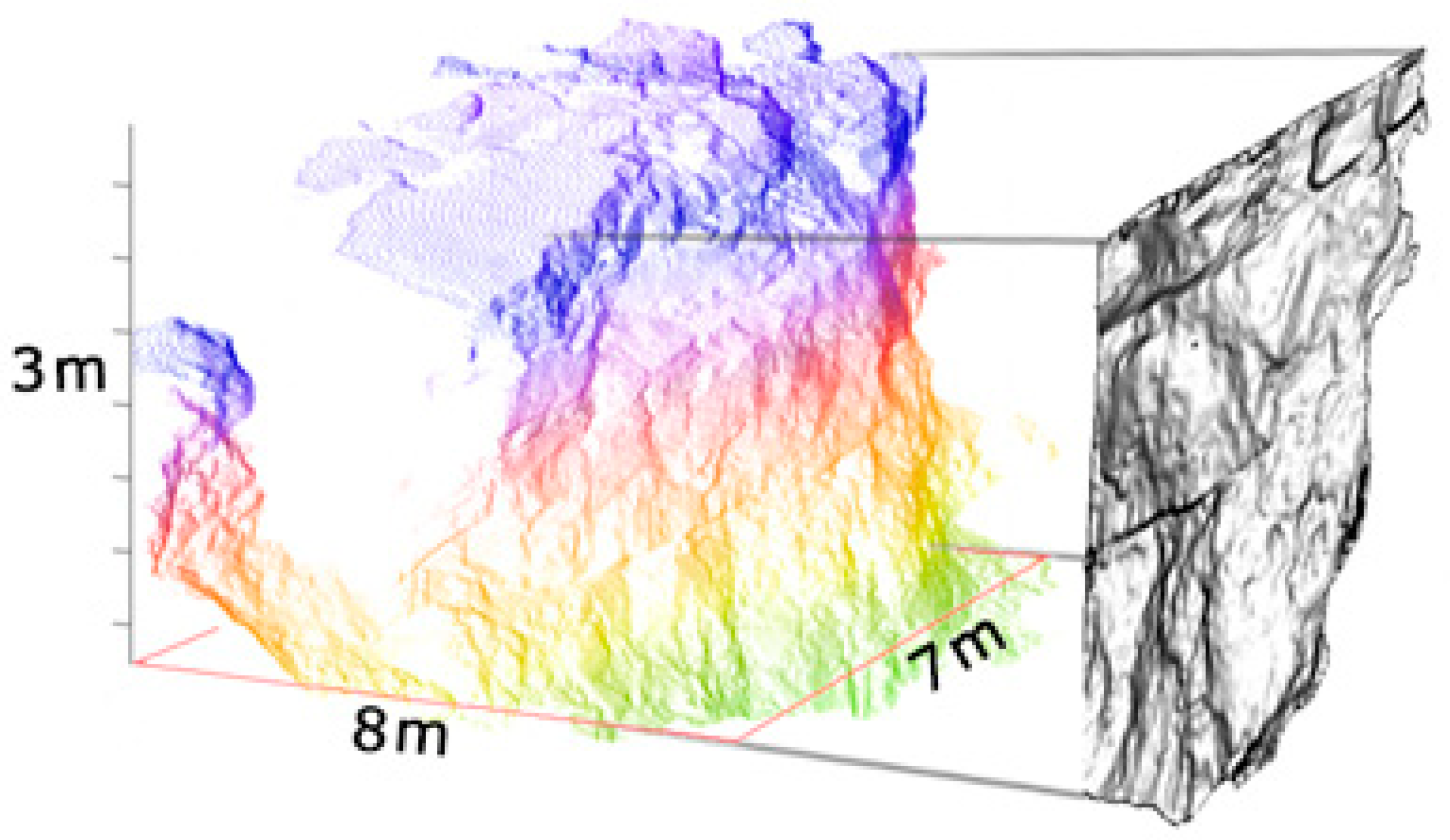
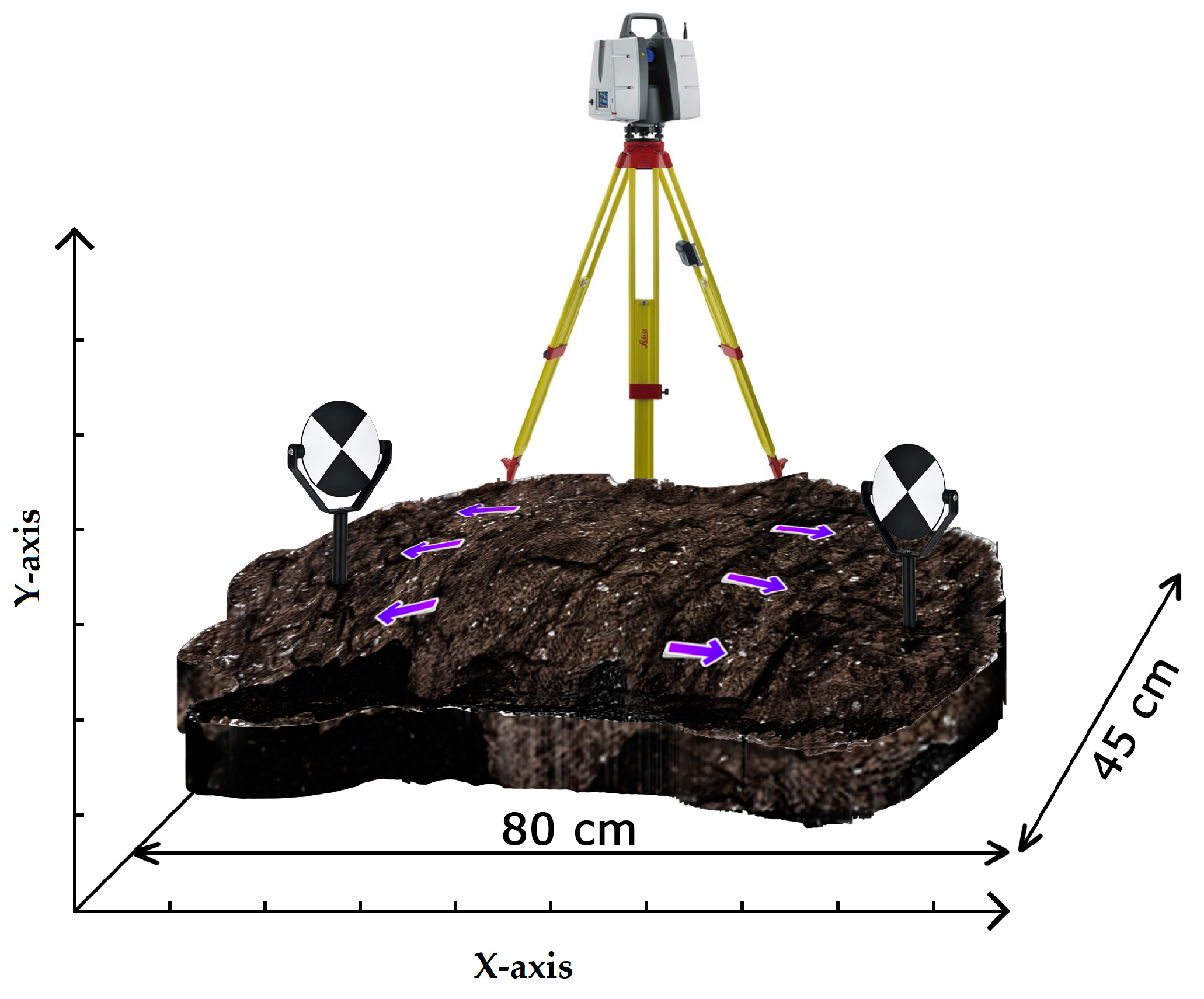
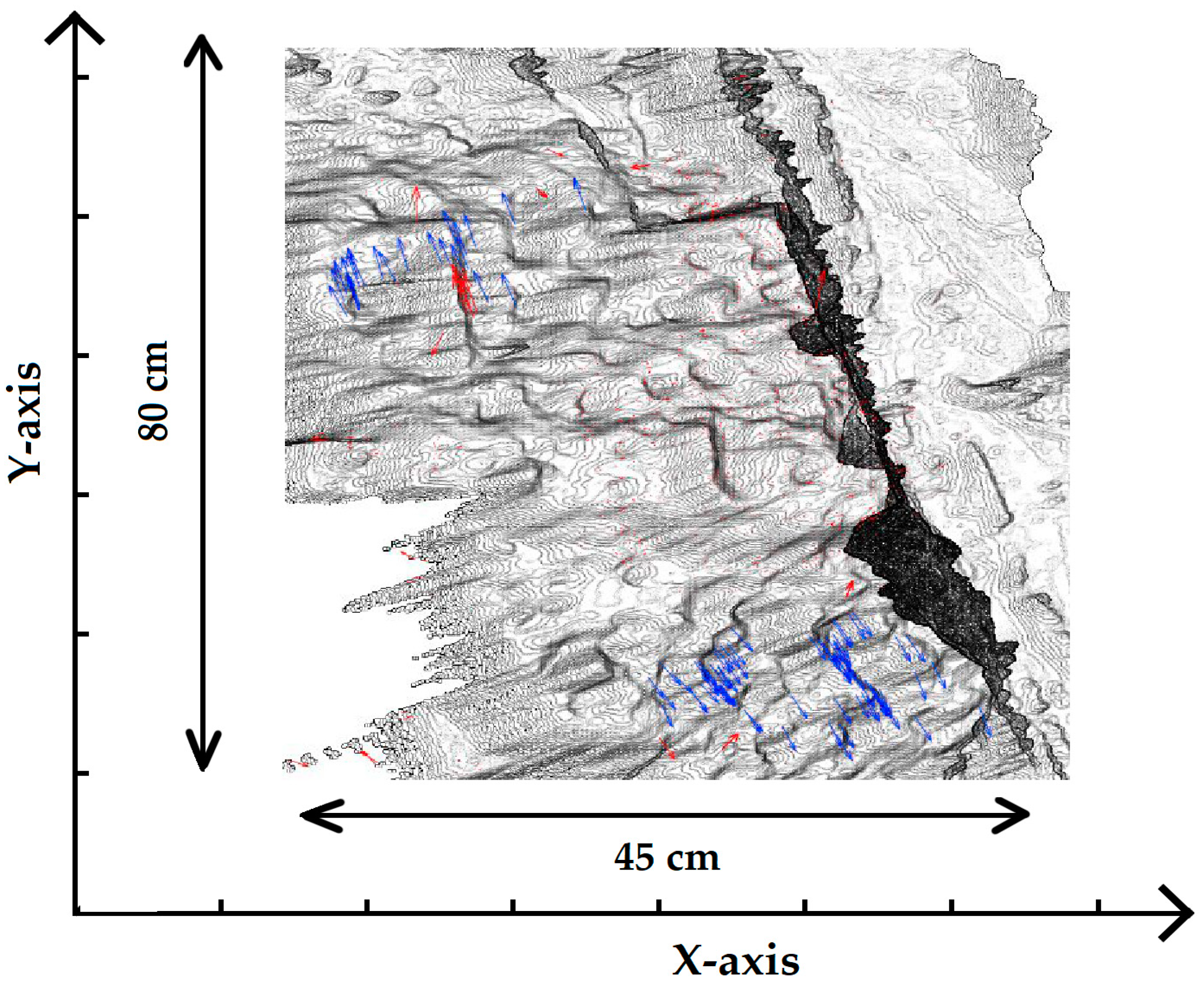
3.1.1. Simulated Laboratory Data Set
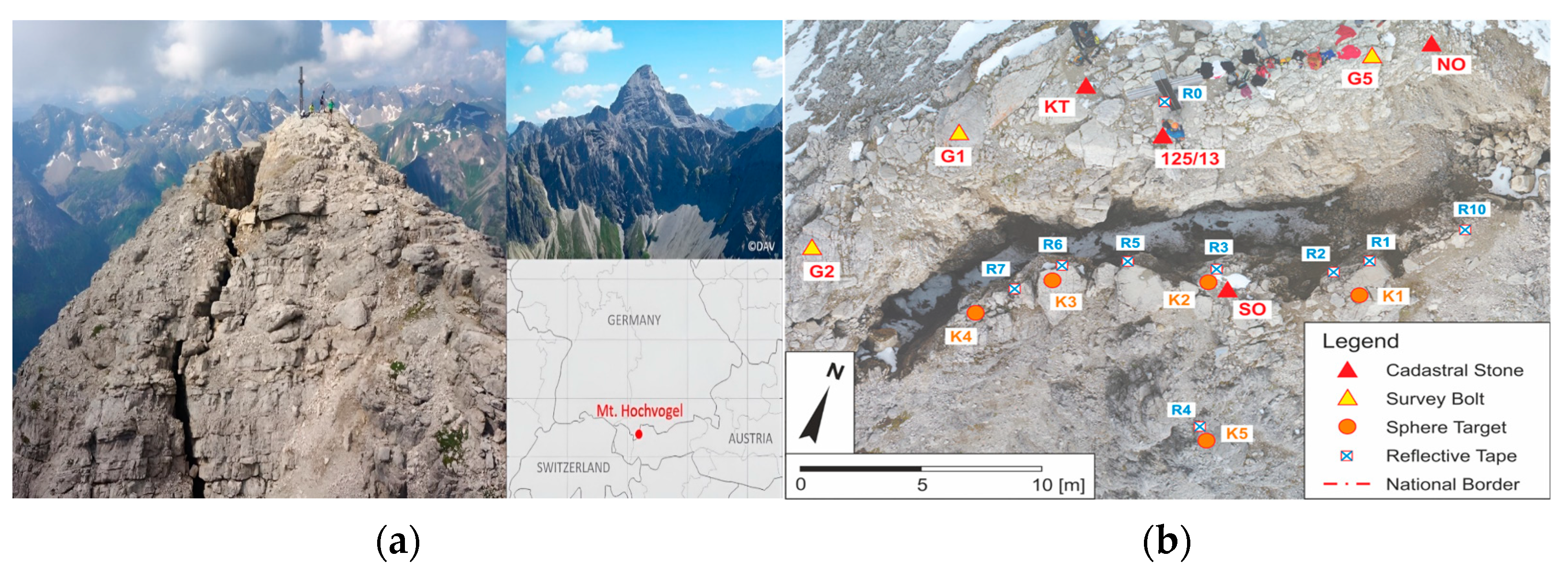
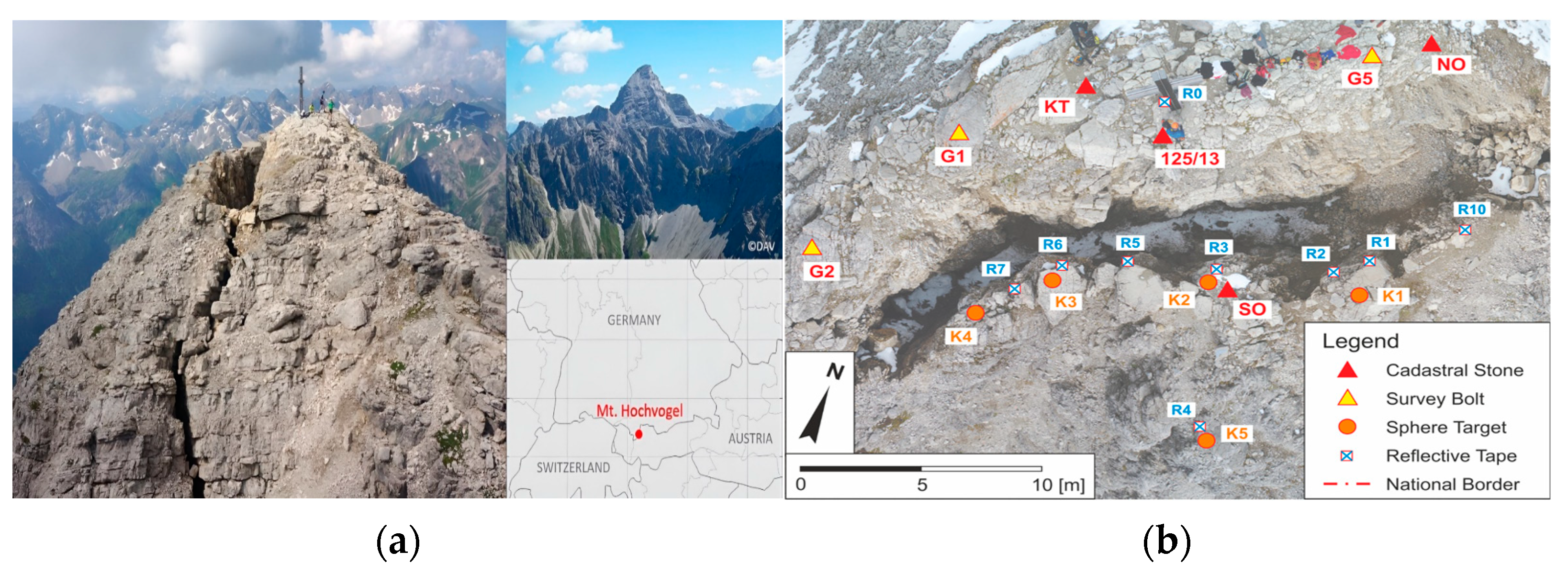
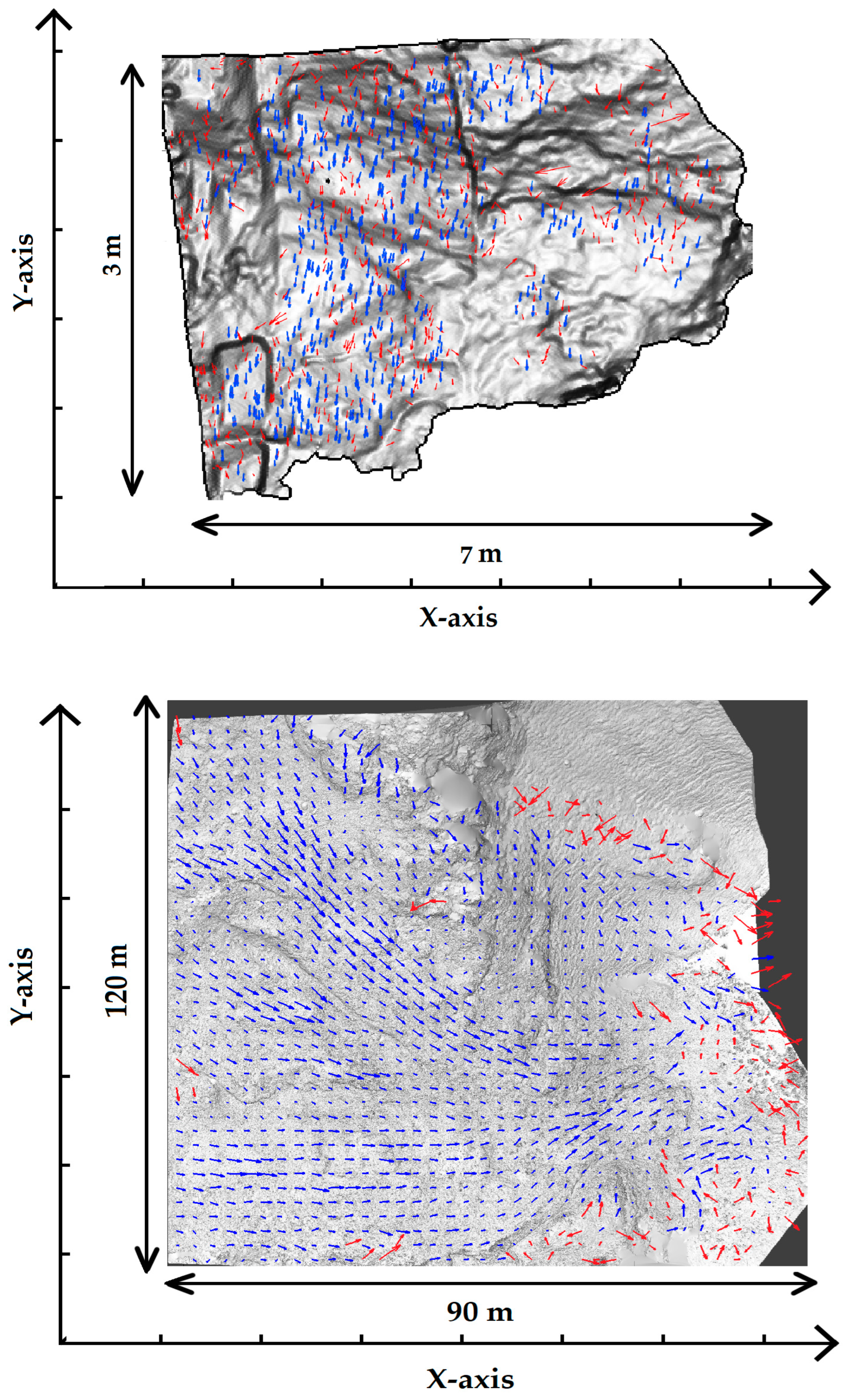
3.1.2. Hochvogel Data Set
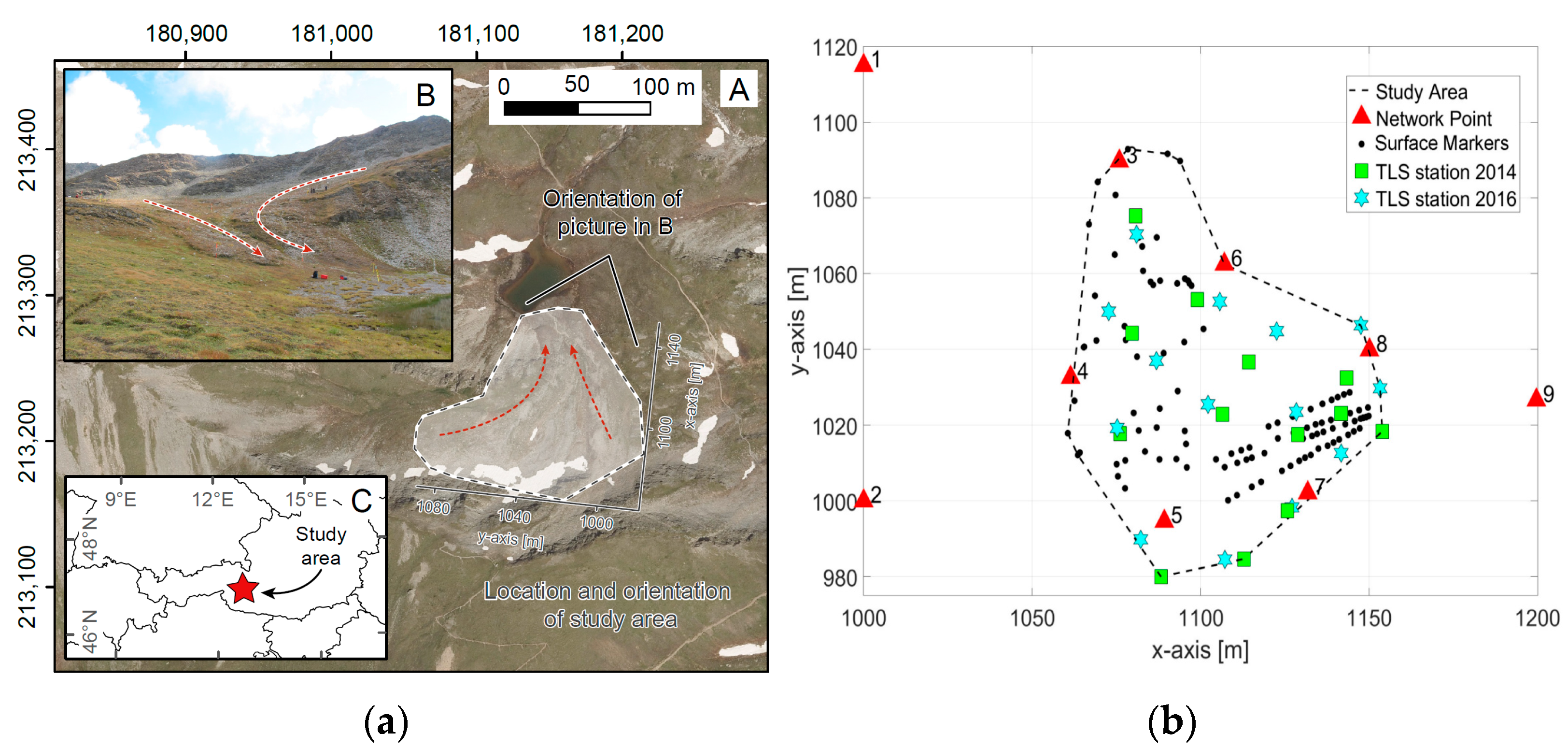
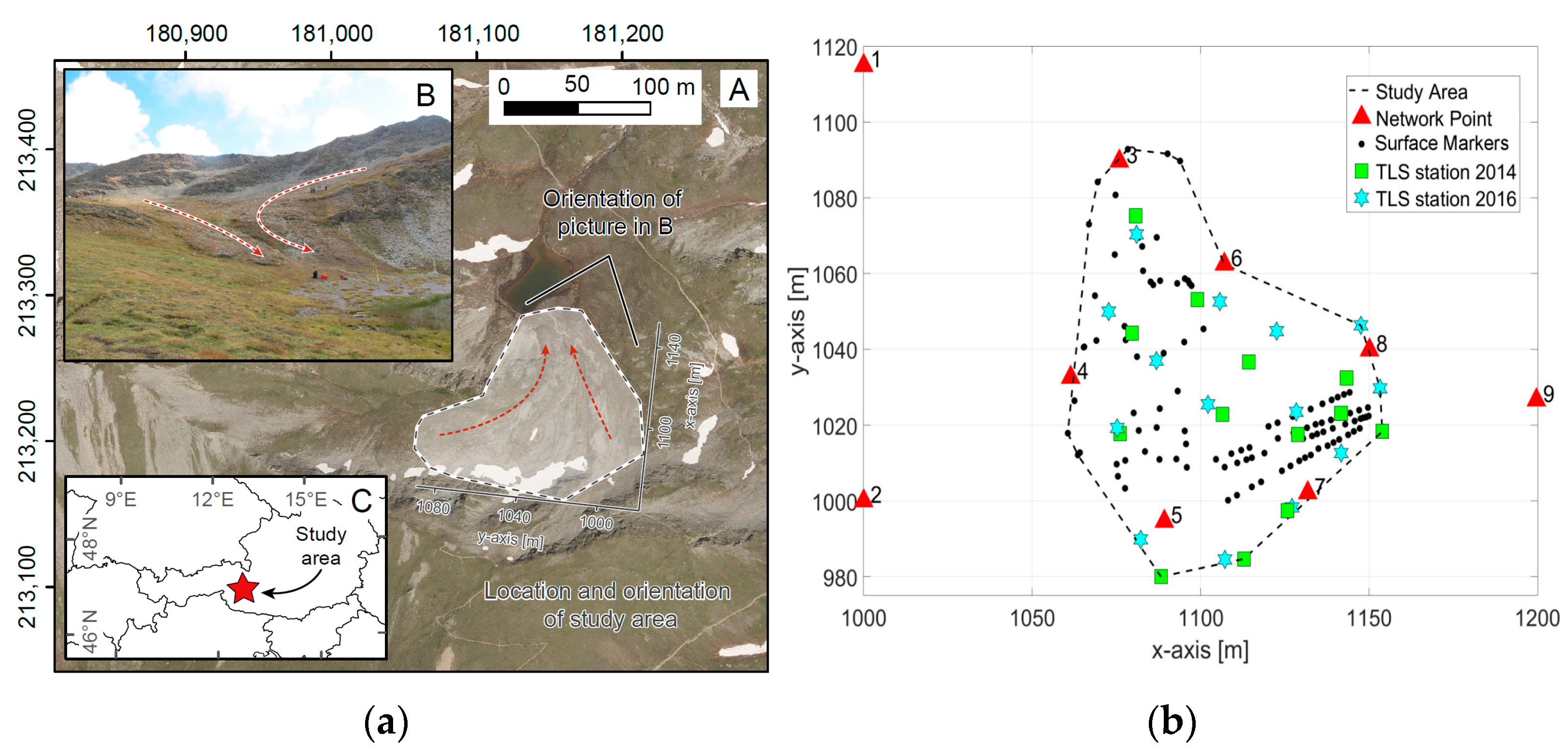
3.1.3. Hohe Tauern Data Set
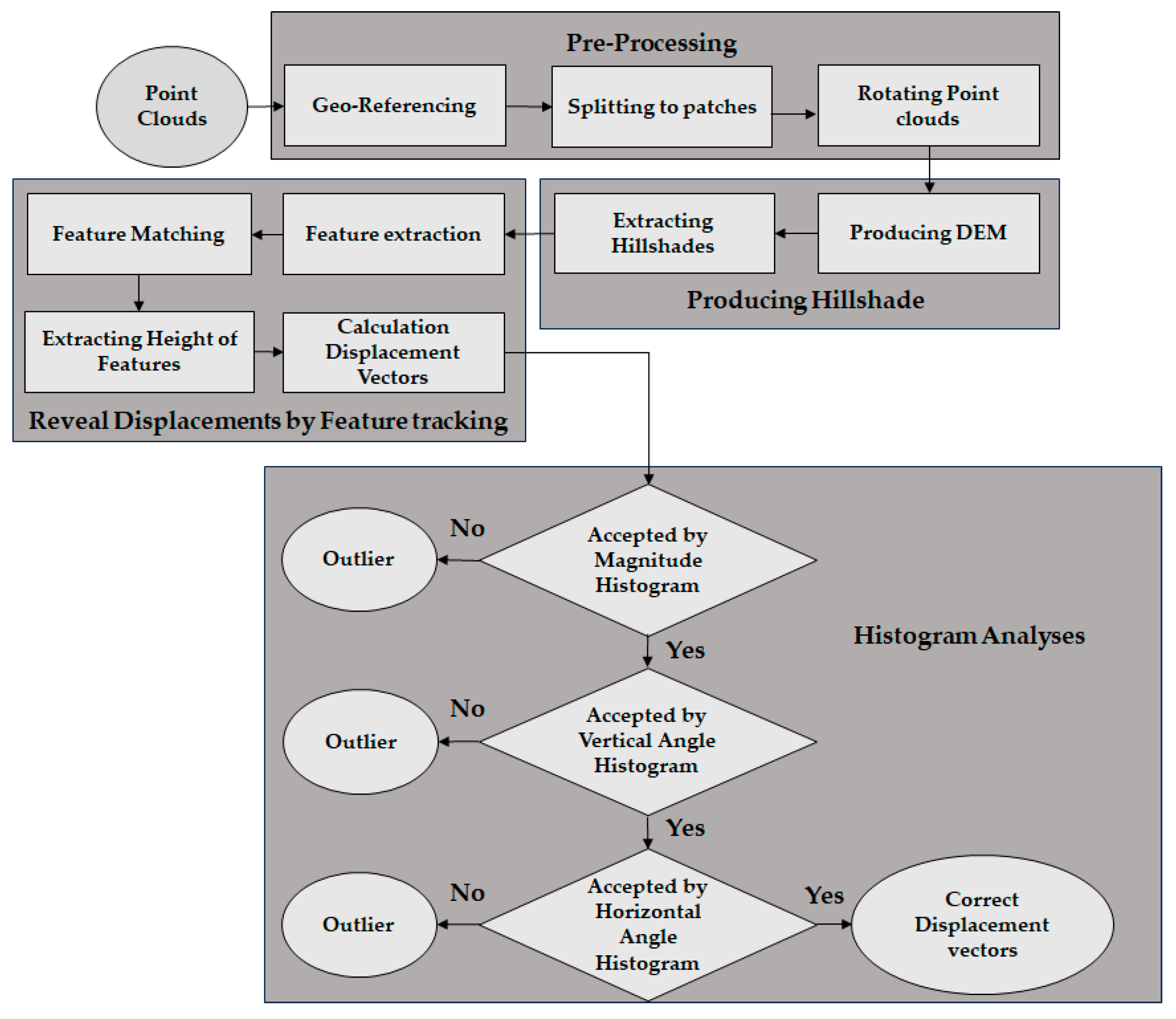
3.2. Methodology
4. Results
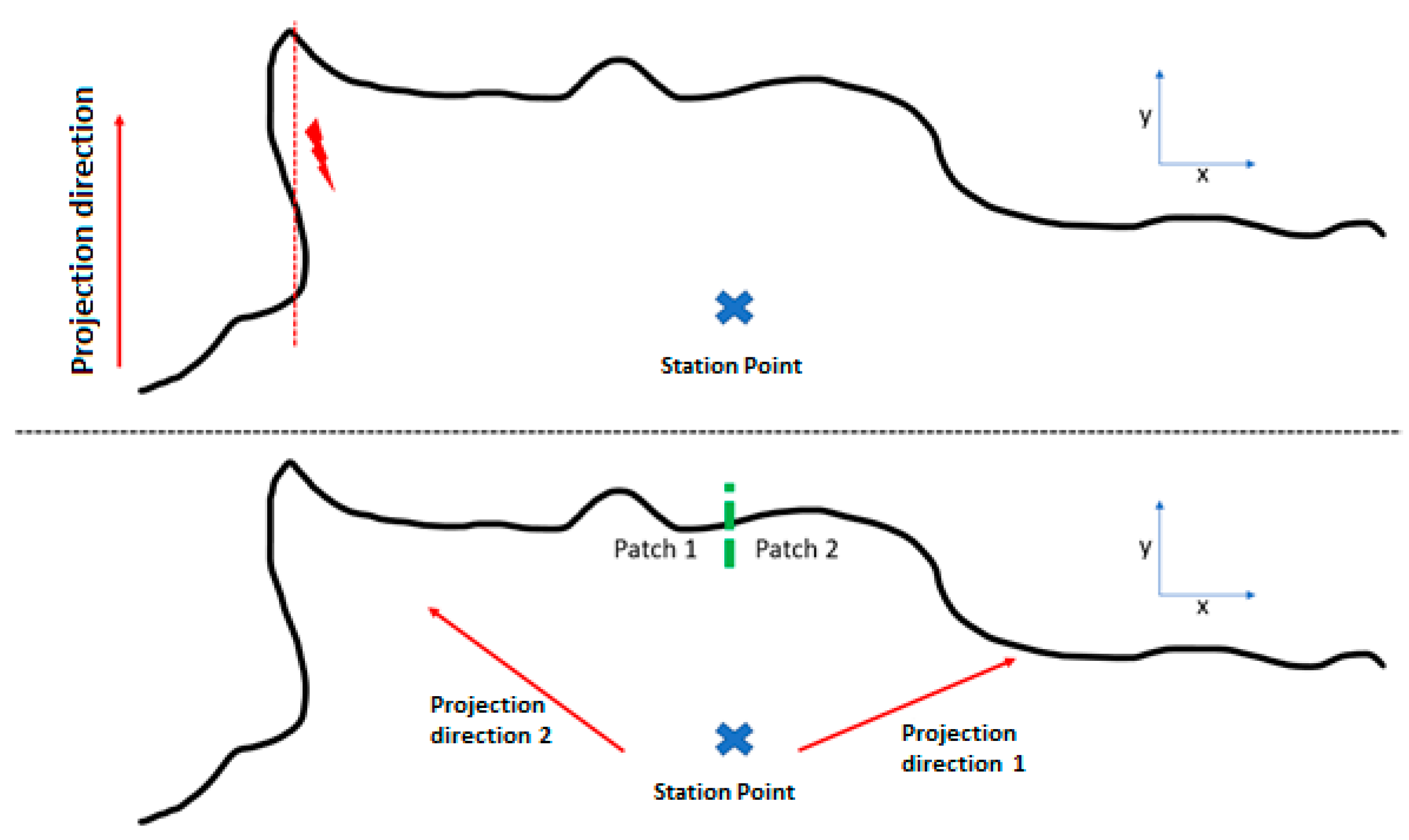
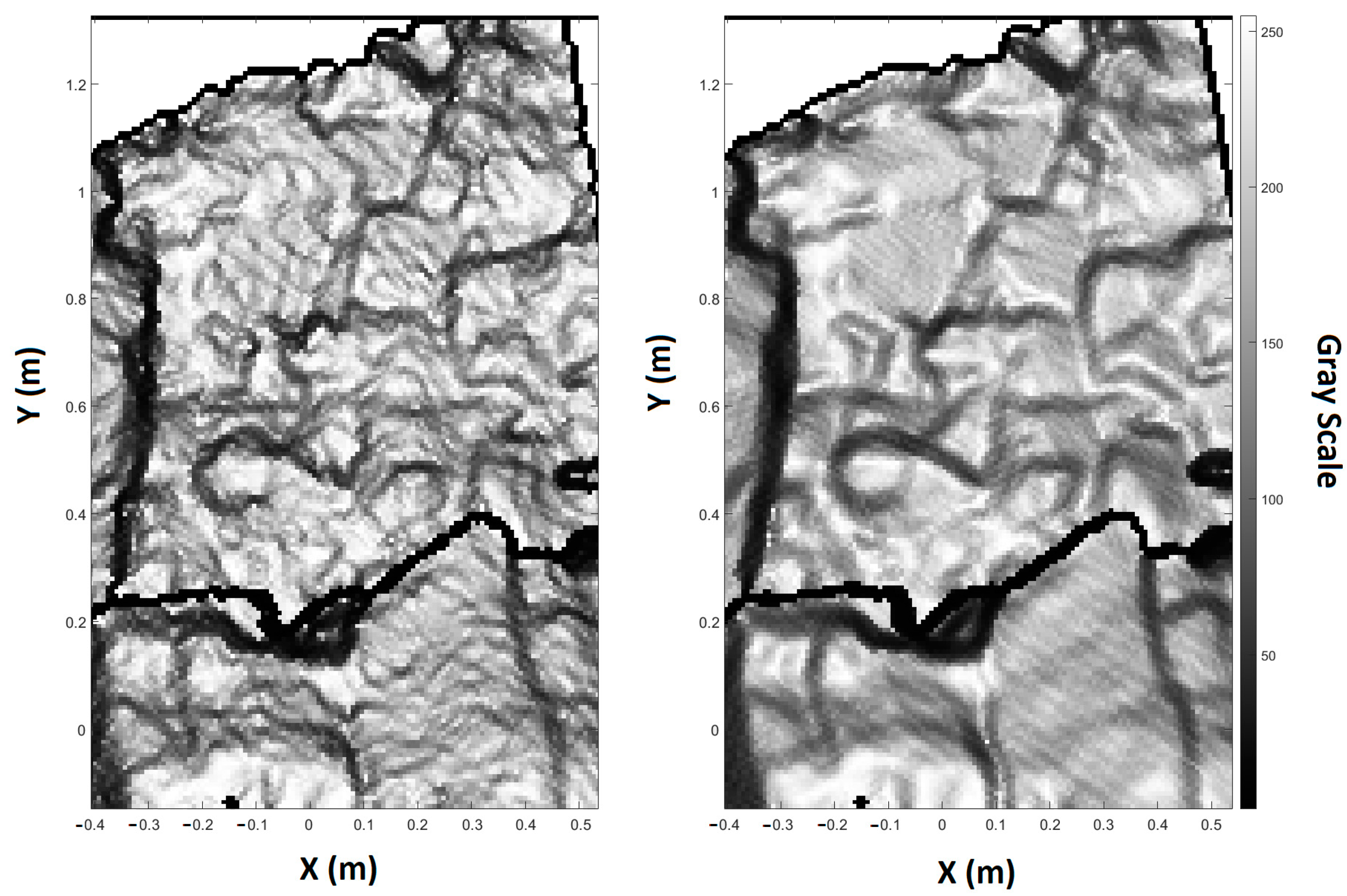
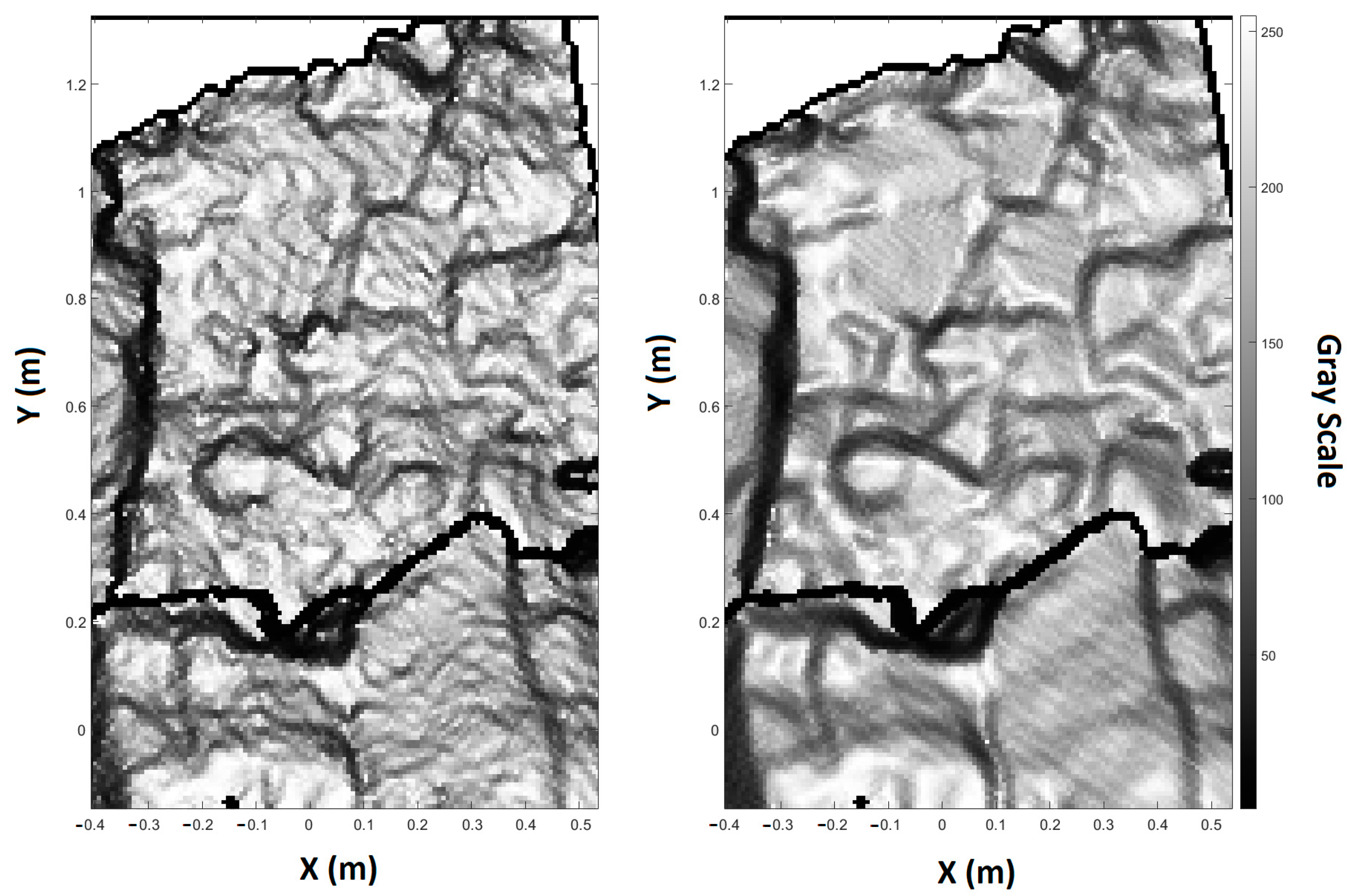
4.1. Producing Hillshades by Using Point Clouds
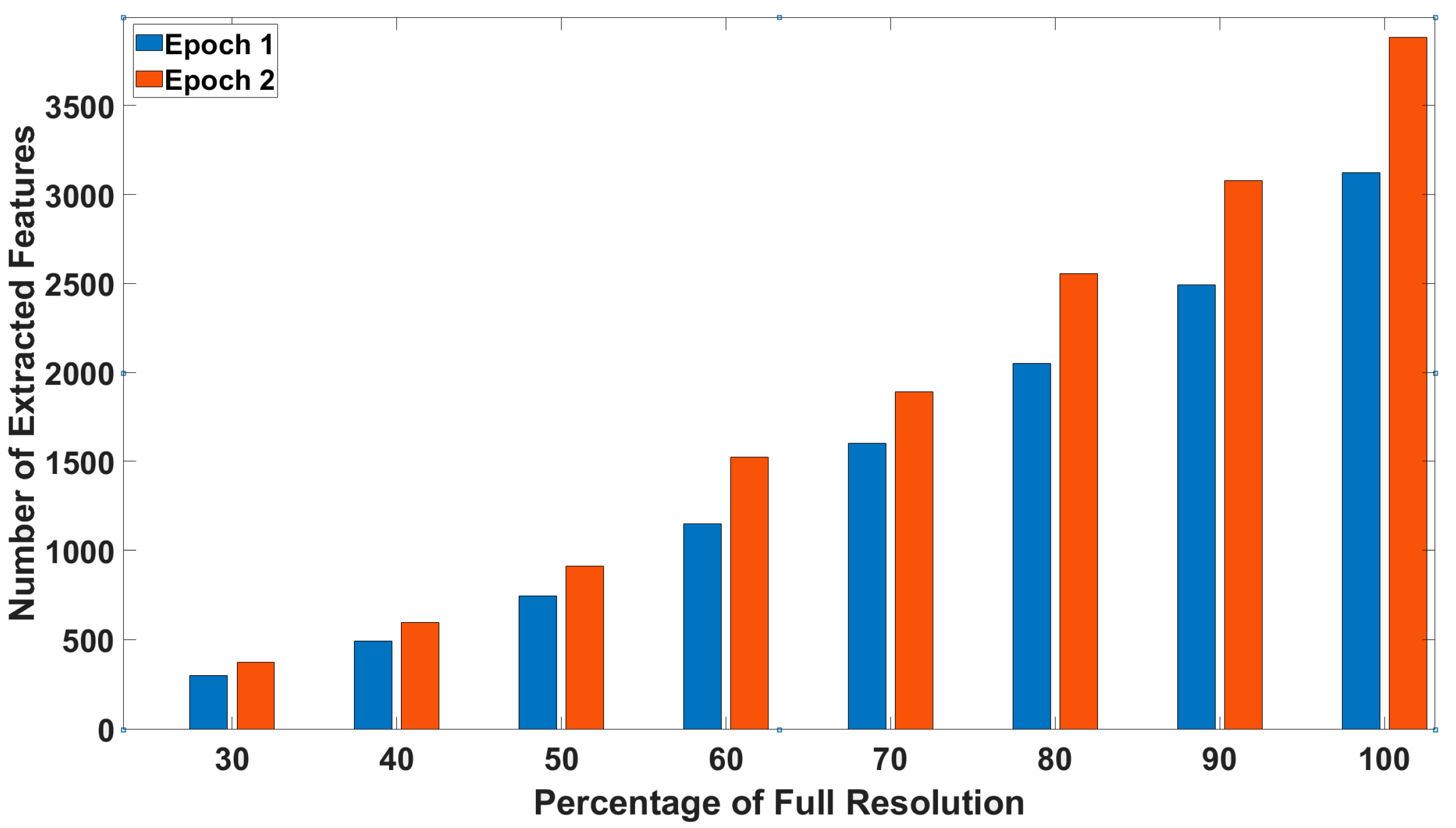
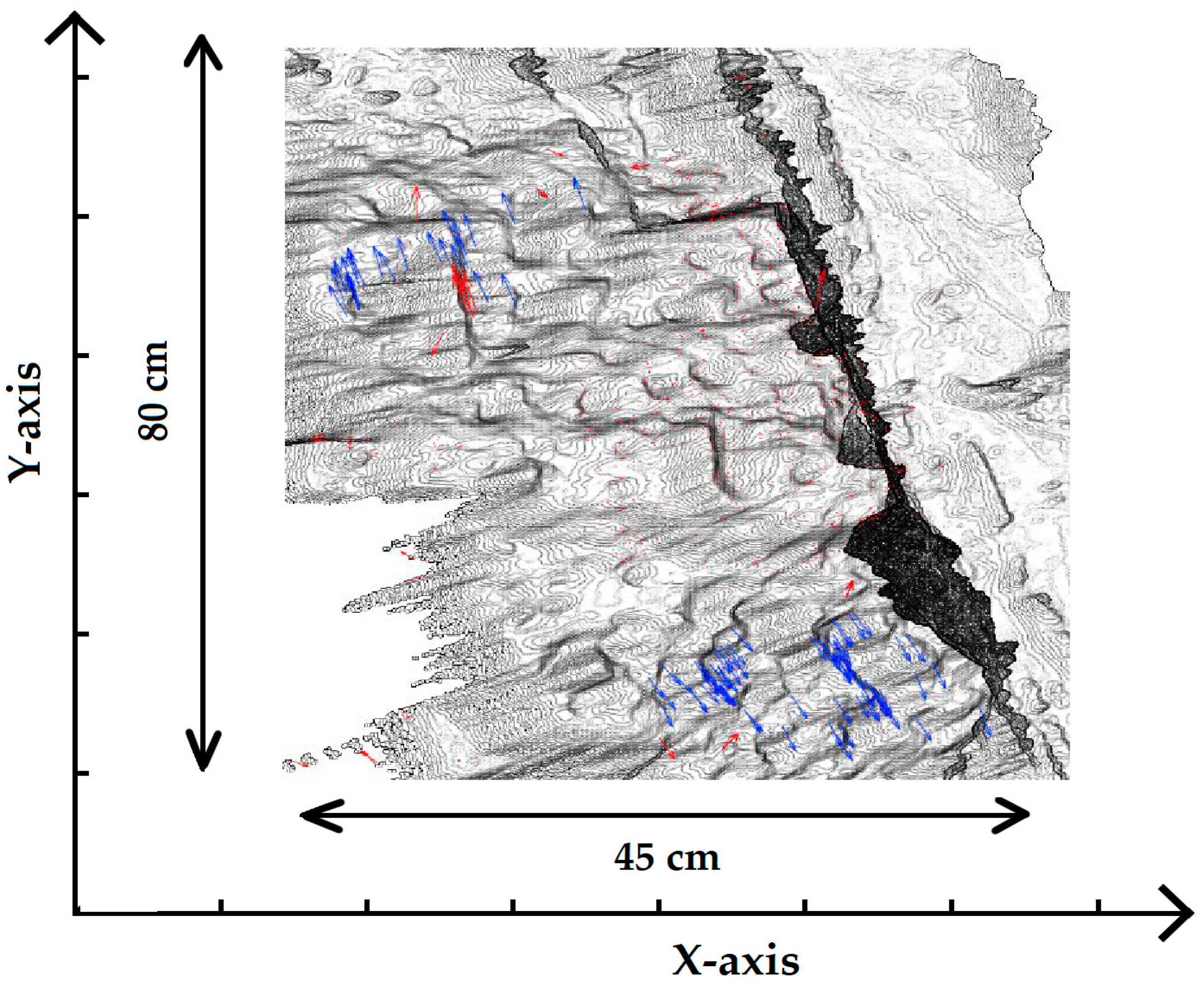
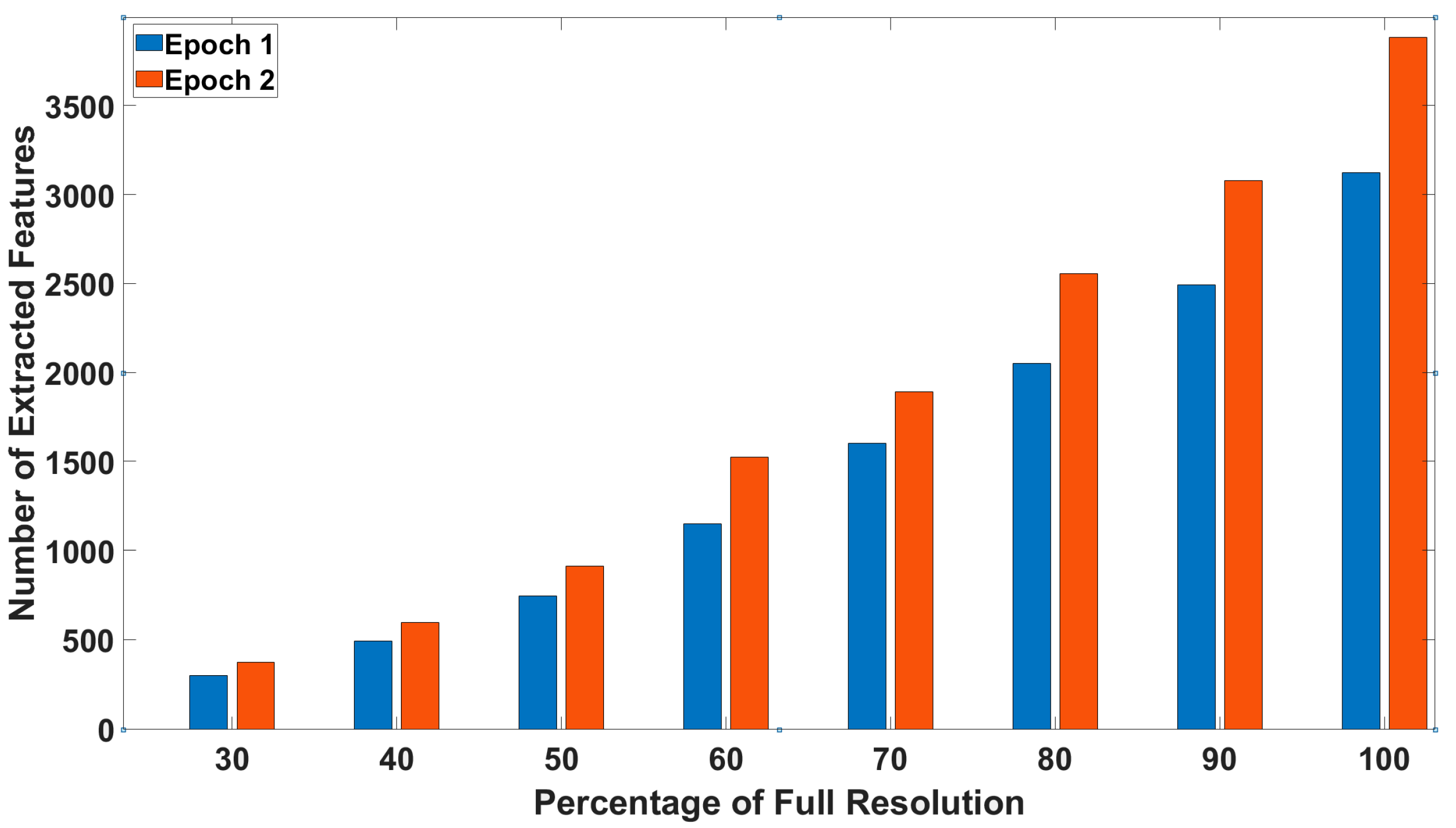
4.2. Matching Process and Histogram Analyses
4.3. Accuracy Assessment
5. Discussion
6. Conclusions and Outlook
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Long, J.; Li, C.; Liu, Y.; Feng, P.; Zuo, Q. A Multi-Feature Fusion Transfer Learning Method for Displacement Prediction of Rainfall Reservoir-Induced Landslide with Step-like Deformation Characteristics. Eng. Geol. 2022, 297, 106494. [Google Scholar] [CrossRef]
- Mizutori, M.; Guha-Sapir, D. Economic Losses, Poverty and Disasters 1998–2017; United Nations Office for Disaster Risk Reduction: Geneva, Switzerland, 2017; Volume 4, pp. 9–15. [Google Scholar]
- Yin, Y.; Liu, X.; Zhao, C.; Tomás, R.; Zhang, Q.; Lu, Z.; Li, B. Multi-Dimensional and Long-Term Time Series Monitoring and Early Warning of Landslide Hazard with Improved Cross-Platform SAR Offset Tracking Method. Sci. China Technol. Sci. 2022, 65, 1891–1912. [Google Scholar] [CrossRef]
- Zhang, Y.; Tang, J.; Cheng, Y.; Huang, L.; Guo, F.; Yin, X.; Li, N. Prediction of Landslide Displacement with Dynamic Features Using Intelligent Approaches. Int. J. Min. Sci. Technol. 2022, 32, 539–549. [Google Scholar] [CrossRef]
- Jiang, S. Study of Landslide Geological Hazard Prediction Method Based on Probability Migration. Nat. Hazards 2021, 108, 1753–1762. [Google Scholar] [CrossRef]
- Ma, J.; Xia, D.; Guo, H.; Wang, Y.; Niu, X.; Liu, Z.; Jiang, S. Metaheuristic-Based Support Vector Regression for Landslide Displacement Prediction: A Comparative Study. Landslides 2022, 19, 2489–2511. [Google Scholar] [CrossRef]
- Leinauer, J.; Weber, S.; Cicoira, A.; Beutel, J.; Krautblatter, M. Towards Prospective Failure Time Forecasting of Slope Failures. In Proceedings of the EGU General Assembly Conference Abstracts 2022, Vienna, Austria, 23–27 May 2022; p. EGU22-7673. [Google Scholar] [CrossRef]
- Ma, P.; Cui, Y.; Wang, W.; Lin, H.; Zhang, Y. Coupling InSAR and Numerical Modeling for Characterizing Landslide Movements under Complex Loads in Urbanized Hillslopes. Landslides 2021, 18, 1611–1623. [Google Scholar] [CrossRef]
- Tayyebi, S.M.; Pastor, M.; Stickle, M.M.; Yagüe, Á.; Manzanal, D.; Molinos, M.; Navas, P. SPH Numerical Modelling of Landslide Movements as Coupled Two-Phase Flows with a New Solution for the Interaction Term. Eur. J. Mech.-BFluids 2022, 96, 1–14. [Google Scholar] [CrossRef]
- Heidarzadeh, M.; Ishibe, T.; Sandanbata, O.; Muhari, A.; Wijanarto, A.B. Numerical Modeling of the Subaerial Landslide Source of the 22 December 2018 Anak Krakatoa Volcanic Tsunami, Indonesia. Ocean Eng. 2020, 195, 106733. [Google Scholar] [CrossRef]
- Xu, Y.; George, D.L.; Kim, J.; Lu, Z.; Riley, M.; Griffin, T.; de la Fuente, J. Landslide Monitoring and Runout Hazard Assessment by Integrating Multi-Source Remote Sensing and Numerical Models: An Application to the Gold Basin Landslide Complex, Northern Washington. Landslides 2021, 18, 1131–1141. [Google Scholar] [CrossRef]
- Jutz, B.K. Bergstürze in den Alpen mit Beispielen aus dem Ötztal; University Vienna: Vienna, Austria, 2012. [Google Scholar]
- Hungr, O.; Leroueil, S.; Picarelli, L. The Varnes Classification of Landslide Types, an Update. Landslides 2014, 11, 167–194. [Google Scholar] [CrossRef]
- Edrich, A.-K.; Yildiz, A.; Roscher, R.; Kowalski, J. A Modular and Scalable Workflow for Data-Driven Modelling of Shallow Landslide Susceptibility. In Proceedings of the EGU General Assembly Conference Abstracts 2022, Vienna, Austria, 23–27 May 2022; p. EGU22-4900. [Google Scholar] [CrossRef]
- Donati, D.; Rabus, B.; Engelbrecht, J.; Stead, D.; Clague, J.; Francioni, M. A Robust SAR Speckle Tracking Workflow for Measuring and Interpreting the 3D Surface Displacement of Landslides. Remote Sens. 2021, 13, 3048. [Google Scholar] [CrossRef]
- Strupler, M.; Anselmetti, F.S.; Hilbe, M.; Kremer, K.; Wiemer, S. A Workflow for the Rapid Assessment of the Landslide-Tsunami Hazard in Peri-Alpine Lakes. Geol. Soc. Lond. Spec. Publ. 2020, 500, 81–95. [Google Scholar] [CrossRef]
- Holst, C.; Janßen, J.; Schmitz, B.; Blome, M.; Dercks, M.; Schoch-Baumann, A.; Blöthe, J.; Schrott, L.; Kuhlmann, H.; Medic, T. Increasing Spatio-Temporal Resolution for Monitoring Alpine Solifluction Using Terrestrial Laser Scanners and 3D Vector Fields. Remote Sens. 2021, 13, 1192. [Google Scholar] [CrossRef]
- Carlà, T.; Tofani, V.; Lombardi, L.; Raspini, F.; Bianchini, S.; Bertolo, D.; Thuegaz, P.; Casagli, N. Combination of GNSS, Satellite InSAR, and GBInSAR Remote Sensing Monitoring to Improve the Understanding of a Large Landslide in High Alpine Environment. Geomorphology 2019, 335, 62–75. [Google Scholar] [CrossRef]
- Paziewski, J.; Sieradzki, R.; Baryla, R. Multi-GNSS High-Rate RTK, PPP and Novel Direct Phase Observation Processing Method: Application to Precise Dynamic Displacement Detection. Meas. Sci. Technol. 2018, 29, 035002. [Google Scholar] [CrossRef]
- Melgar, D.; Melbourne, T.I.; Crowell, B.W.; Geng, J.; Szeliga, W.; Scrivner, C.; Santillan, M.; Goldberg, D.E. Real-Time High-Rate GNSS Displacements: Performance Demonstration during the 2019 Ridgecrest, California, Earthquakes. Seismol. Res. Lett. 2020, 91, 1943–1951. [Google Scholar] [CrossRef]
- Capilla, R.M.; Berné, J.L.; Martín, A.; Rodrigo, R. Simulation Case Study of Deformations and Landslides Using Real-Time GNSS Precise Point Positioning Technique. Geomat. Nat. Hazards Risk 2016, 7, 1856–1873. [Google Scholar] [CrossRef]
- Gümüş, K.; Selbesoğlu, M.O. Evaluation of NRTK GNSS Positioning Methods for Displacement Detection by a Newly Designed Displacement Monitoring System. Measurement 2019, 142, 131–137. [Google Scholar] [CrossRef]
- Poluzzi, L.; Tavasci, L.; Corsini, F.; Barbarella, M.; Gandolfi, S. Low-Cost GNSS Sensors for Monitoring Applications. Appl. Geomat. 2020, 12, 35–44. [Google Scholar] [CrossRef]
- Notti, D.; Cina, A.; Manzino, A.; Colombo, A.; Bendea, I.H.; Mollo, P.; Giordan, D. Low-Cost GNSS Solution for Continuous Monitoring of Slope Instabilities Applied to Madonna Del Sasso Sanctuary (NW Italy). Sensors 2020, 20, 289. [Google Scholar] [CrossRef]
- Raffl, L.; Holst, C. Including Virtual Target Points from Laser Scanning into the Point-Wise Rigorous Deformation Analysis at Geo-Monitoring Applications. In Proceedings of the 5th Joint International Symposium on Deformation Monitoring-JISDM 2022, València, Spain, 20–22 June 2022; Editorial de la Universitat Politècnica de València: Valencia, Spain, 2022. [Google Scholar] [CrossRef]
- Dall’Asta, E.; Forlani, G.; Roncella, R.; Santise, M.; Diotri, F.; Morra di Cella, U. Unmanned Aerial Systems and DSM Matching for Rock Glacier Monitoring. ISPRS J. Photogramm. Remote Sens. 2017, 127, 102–114. [Google Scholar] [CrossRef]
- Eichel, J.; Draebing, D.; Kattenborn, T.; Senn, J.A.; Klingbeil, L.; Wieland, M.; Heinz, E. Unmanned Aerial Vehicle-based Mapping of Turf-banked Solifluction Lobe Movement and Its Relation to Material, Geomorphometric, Thermal and Vegetation Properties. Permafr. Periglac. Process. 2020, 31, 97–109. [Google Scholar] [CrossRef]
- Cenni, N.; Fiaschi, S.; Fabris, M. Integrated Use of Archival Aerial Photogrammetry, GNSS, and InSAR Data for the Monitoring of the Patigno Landslide (Northern Apennines, Italy). Landslides 2021, 18, 2247–2263. [Google Scholar] [CrossRef]
- Vanderhorst, H.R. Method of Applying Unmanned Aerial Vehicle (UAV) for Landslides Identification in the Dominican Republic. Preprint; In Review. 2022. Available online: https://www.researchsquare.com/article/rs-1653879/v1 (accessed on 17 July 2023).
- Đorđević, D.R.; Đurić, U.; Bakrač, S.T.; Drobnjak, S.M.; Radojčić, S. Using Historical Aerial Photography in Landslide Monitoring: Umka Case Study, Serbia. Land 2022, 11, 2282. [Google Scholar] [CrossRef]
- Lian, X.; Li, Z.; Yuan, H.; Liu, J.; Zhang, Y.; Liu, X.; Wu, Y. Rapid Identification of Landslide, Collapse and Crack Based on Low-Altitude Remote Sensing Image of UAV. J. Mt. Sci. 2020, 17, 2915–2928. [Google Scholar] [CrossRef]
- Peppa, M.V.; Mills, J.P.; Moore, P.; Miller, P.E.; Chambers, J.E. Accuracy assessment of a uav-based landslide monitoring system. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume XLI-B5, 2016 XXIII ISPRS Congress, Prague, Czech Republic, 12–19 July 2016; pp. 895–902. [Google Scholar] [CrossRef]
- Roncella, R.; Forlani, G.; Fornari, M.; Diotri, F. Landslide Monitoring by Fixed-Base Terrestrial Stereo-Photogrammetry. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, II–5, 297–304. [Google Scholar] [CrossRef]
- Cardenal, J.; Mata, E.; Perez-Garcia, J.L.; Delgado, J.; Hernandez, M.A.; Gonzalez, A.; Diaz-de-Teren, J.R. Close Range Digital Photogrammetry Techniques Applied to Landslide Monitoring. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2008, 37, 235–240. [Google Scholar]
- Lucks, L.; Hirt, P.-R.; Hoegner, L.; Stilla, U. Photogrammetric Monitoring of Gravitational Mass Movements in Alpine Regions by Markerless 3D Motion Capture. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2022, XLIII-B2-2022, 1063–1069. [Google Scholar] [CrossRef]
- Kundal, S.; Chowdhury, A.; Bhardwaj, A.; Garg, P.K.; Mishra, V. GeoBIA-Based Semi-Automated Landslide Detection Using UAS Data: A Case Study of Uttarakhand Himalayas. In Proceedings of the SPIE Conferences, Boston, MA, USA, 18–19 April 2023; Volume 12327, pp. 321–329. [Google Scholar] [CrossRef]
- Ullo, S.L.; Langenkamp, M.S.; Oikarinen, T.P.; Del Rosso, M.P.; Sebastianelli, A.; Piccirillo, F.; Sica, S. Landslide Geohazard Assessment with Convolutional Neural Networks Using Sentinel-2 Imagery Data. In Proceedings of the IGARSS 2019–2019 IEEE International Geoscience and Remote Sensing Symposium; IEEE: Yokohama, Japan, 2019; pp. 9646–9649. [Google Scholar] [CrossRef]
- König, T.; Kux, H.J.H.; Mendes, R.M. Shalstab Mathematical Model and WorldView-2 Satellite Images to Identification of Landslide-Susceptible Areas. Nat. Hazards 2019, 97, 1127–1149. [Google Scholar] [CrossRef]
- Wasowski, J.; Bovenga, F. Remote Sensing of Landslide Motion with Emphasis on Satellite Multi-Temporal Interferometry Applications. In Landslide Hazards, Risks, and Disasters; Elsevier: Amsterdam, The Netherlands, 2022; pp. 365–438. [Google Scholar] [CrossRef]
- Hussain, Y.; Schlögel, R.; Innocenti, A.; Hamza, O.; Iannucci, R.; Martino, S.; Havenith, H.-B. Review on the Geophysical and UAV-Based Methods Applied to Landslides. Remote Sens. 2022, 14, 4564. [Google Scholar] [CrossRef]
- Kermarrec, G.; Yang, Z.; Czerwonka-Schröder, D. Classification of Terrestrial Laser Scanner Point Clouds: A Comparison of Methods for Landslide Monitoring from Mathematical Surface Approximation. Remote Sens. 2022, 14, 5099. [Google Scholar] [CrossRef]
- Jiang, S.; Deng, X.; Chen, M. 3-D Laser Scanning Landslide Deformation Monitoring and Data Processing Based on Computer Cluster. J. Phys. Conf. Ser. 2019, 1345, 062039. [Google Scholar] [CrossRef]
- Pesántez Cabrera, P.C. Land Movement Detection from Terrestrial Laser Scanner (LiDAR) Analysis. In Laser Radar Technology and Applications XXVI; Turner, M.D., Kamerman, G.W., Eds.; SPIE: Online, USA, 2021; p. 17. [Google Scholar] [CrossRef]
- Ozdogan, M.V. Landslide Detection and Characterization Using Terrestrial 3D Laser Scanning (LiDAR). Acta Geodyn. Geomater. 2019, 16, 379–392. [Google Scholar] [CrossRef]
- Zhao, L.; Ma, X.; Xiang, Z.; Zhang, S.; Hu, C.; Zhou, Y.; Chen, G. Landslide Deformation Extraction from Terrestrial Laser Scanning Data with Weighted Least Squares Regularization Iteration Solution. Remote Sens. 2022, 14, 2897. [Google Scholar] [CrossRef]
- Guo, Y.; Li, X.; Ju, S.; Lyu, Q.; Liu, T. Utilization of 3D Laser Scanning for Stability Evaluation and Deformation Monitoring of Landslides. J. Environ. Public Health 2022. [Google Scholar] [CrossRef] [PubMed]
- Pesántez, P.C. Landslide Study Using Terrestrial Laser Scanner (Lidar) Analysis. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, XLIII-B3-2020, 1251–1256. [Google Scholar] [CrossRef]
- Jaboyedoff, M.; Derron, M.-H. Landslide Analysis Using Laser Scanners. In Developments in Earth Surface Processes; Elsevier: Amsterdam, The Netherlands, 2020; Volume 23, pp. 207–230. [Google Scholar] [CrossRef]
- Abbas, M.A.; Fuad, N.A.; Idris, K.M.; Opaluwa, Y.D.; Hashim, N.M.; Majid, Z.; Sulaiman, S.A. Reliability of Terrestrial Laser Scanner Measurement in Slope Monitoring. IOP Conf. Ser. Earth Environ. Sci. 2019, 385, 012042. [Google Scholar] [CrossRef]
- Zeybek, M.; Şanlıoğlu, İ. Accurate Determination of the Taşkent (Konya, Turkey) Landslide Using a Long-Range Terrestrial Laser Scanner. Bull. Eng. Geol. Environ. 2015, 74, 61–76. [Google Scholar] [CrossRef]
- Boyd, J.; Chambers, J.; Wilkinson, P.; Peppa, M.; Watlet, A.; Kirkham, M.; Jones, L.; Swift, R.; Ulhemann, S.; Holmes, J.; et al. Coupling Terrestrial Laser Scanning and UAV Photogrammetry with Geoelectrical Data for Better Time-Lapse Hydrological Characterisation of an Active Landslide. In Proceedings of the EGU General Assembly 2022, Vienna, Austria, 23–27 May 2022. [Google Scholar] [CrossRef]
- Ji, H.; Luo, X. 3D Scene Reconstruction of Landslide Topography Based on Data Fusion between Laser Point Cloud and UAV Image. Environ. Earth Sci. 2019, 78, 534. [Google Scholar] [CrossRef]
- Zheng, X.; Yang, X.; Ma, H.; Ren, G.; Yu, Z.; Yang, F.; Zhang, H.; Gao, W. Integrative Landslide Emergency Monitoring Scheme Based on GB-INSAR Interferometry, Terrestrial Laser Scanning and UAV Photography. J. Phys. Conf. Ser. 2019, 1213, 052069. [Google Scholar] [CrossRef]
- Jiang, N.; Li, H.; Hu, Y.; Zhang, J.; Dai, W.; Li, C.; Zhou, J.-W. A Monitoring Method Integrating Terrestrial Laser Scanning and Unmanned Aerial Vehicles for Different Landslide Deformation Patterns. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 10242–10255. [Google Scholar] [CrossRef]
- Jiang, N.; Li, H.-B.; Li, C.-J.; Xiao, H.-X.; Zhou, J.-W. A Fusion Method Using Terrestrial Laser Scanning and Unmanned Aerial Vehicle Photogrammetry for Landslide Deformation Monitoring Under Complex Terrain Conditions. IEEE Trans. Geosci. Remote Sens. 2022, 60, 4707214. [Google Scholar] [CrossRef]
- Besl, P.J.; McKay, N.D. Method for Registration of 3-D Shapes. In Proceedings of the SPIE Conferences, Boston, MA, USA, 14–15 November 1991; pp. 586–606. [Google Scholar] [CrossRef]
- Lague, D.; Brodu, N.; Leroux, J. Accurate 3D Comparison of Complex Topography with Terrestrial Laser Scanner: Application to the Rangitikei Canyon (N-Z). ISPRS J. Photogramm. Remote Sens. 2013, 82, 10–26. [Google Scholar] [CrossRef]
- Winiwarter, L.; Anders, K.; Höfle, B. M3C2-EP: Pushing the Limits of 3D Topographic Point Cloud Change Detection by Error Propagation. ISPRS J. Photogramm. Remote Sens. 2021, 178, 240–258. [Google Scholar] [CrossRef]
- Yang, Y.; Schwieger, V. Supervoxel-Based Targetless Registration and Identification of Stable Areas for Deformed Point Clouds. J. Appl. Geod. 2022, 17, 161–170. [Google Scholar] [CrossRef]
- Thomas Wunderlich, L.R. Challenges and Hybrid Approaches in Alpine Rockslide Prevention—An Alarming Case Study; INGEO&SIG: Tamil Nadu, India, 2020; p. 129. [Google Scholar]
- Horn, B.K.P. Hill Shading and the Reflectance Map. Proc. IEEE 1981, 69, 14–47. [Google Scholar] [CrossRef]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Alcantarilla, P.F.; Bartoli, A.; Davison, A.J. KAZE features. In Proceedings of the Computer Vision–ECCV 2012: 12th European Conference on Computer Vision, Florence, Italy, 7–13 October 2012; Proceedings, Part VI 12. Springer: Berlin/Heidelberg, Germany, 2012; pp. 214–227. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
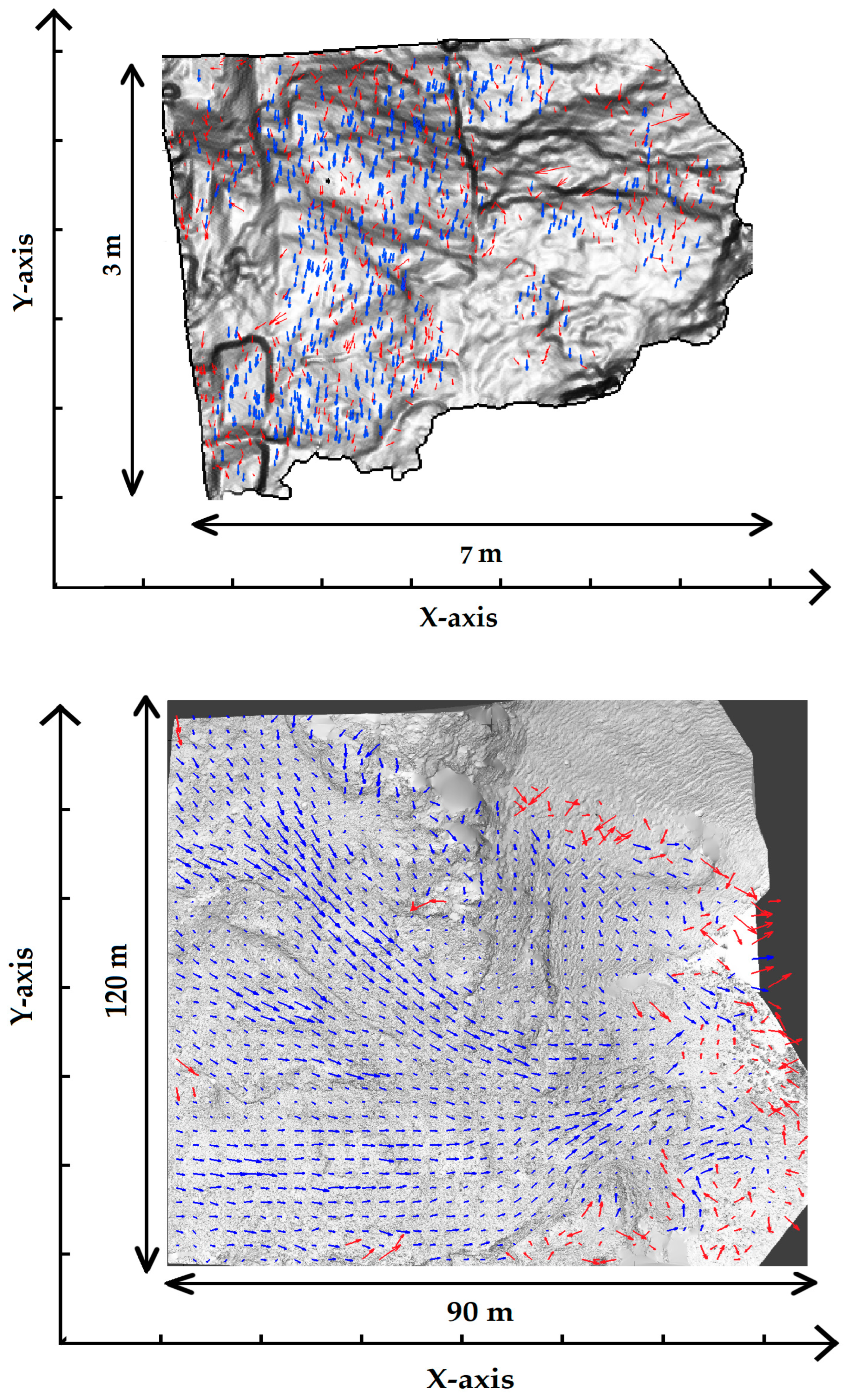
| Data Set | Displacement Vectors | Outliers | Percentage of Outliers |
|---|---|---|---|
| Laboratory | 138 | 36 | 26.1% |
| Hochvogel | 1068 | 169 | 15.8% |
| Hohe Tauern | 1220 | 322 | 26.4% |
| Point Number | Detected Displacement (mm) | Direction | The Difference with the Applied Displacement (mm) | The Ratio of Error to Magnitude |
|---|---|---|---|---|
| 1 | 16.2 | Right | 0.9 | 5.2% |
| 2 | 16.3 | Right | 0.8 | 4.6% |
| 3 | 16.9 | Right | 1.1 | 6.4% |
| 4 | 16.6 | Right | 0.5 | 2.9% |
| 5 | 13.4 | Left | 0.6 | 4.3% |
| 6 | 13.0 | Left | 1.0 | 7.1% |
| 7 | 13.3 | Left | 0.6 | 4.3% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hosseini, K.; Reindl, L.; Raffl, L.; Wiedemann, W.; Holst, C. 3D Landslide Monitoring in High Spatial Resolution by Feature Tracking and Histogram Analyses Using Laser Scanners. Remote Sens. 2024, 16, 138. https://doi.org/10.3390/rs16010138
Hosseini K, Reindl L, Raffl L, Wiedemann W, Holst C. 3D Landslide Monitoring in High Spatial Resolution by Feature Tracking and Histogram Analyses Using Laser Scanners. Remote Sensing. 2024; 16(1):138. https://doi.org/10.3390/rs16010138
Chicago/Turabian StyleHosseini, Kourosh, Leonhard Reindl, Lukas Raffl, Wolfgang Wiedemann, and Christoph Holst. 2024. "3D Landslide Monitoring in High Spatial Resolution by Feature Tracking and Histogram Analyses Using Laser Scanners" Remote Sensing 16, no. 1: 138. https://doi.org/10.3390/rs16010138
APA StyleHosseini, K., Reindl, L., Raffl, L., Wiedemann, W., & Holst, C. (2024). 3D Landslide Monitoring in High Spatial Resolution by Feature Tracking and Histogram Analyses Using Laser Scanners. Remote Sensing, 16(1), 138. https://doi.org/10.3390/rs16010138