
Feature Selection for Edge Detection in PolSAR Images

 , , and
, , and 
Abstract
1. Introduction
- (i)
- Computational Resources used in this research.
- (ii)
- The data (images) used in this research.
- (iii)
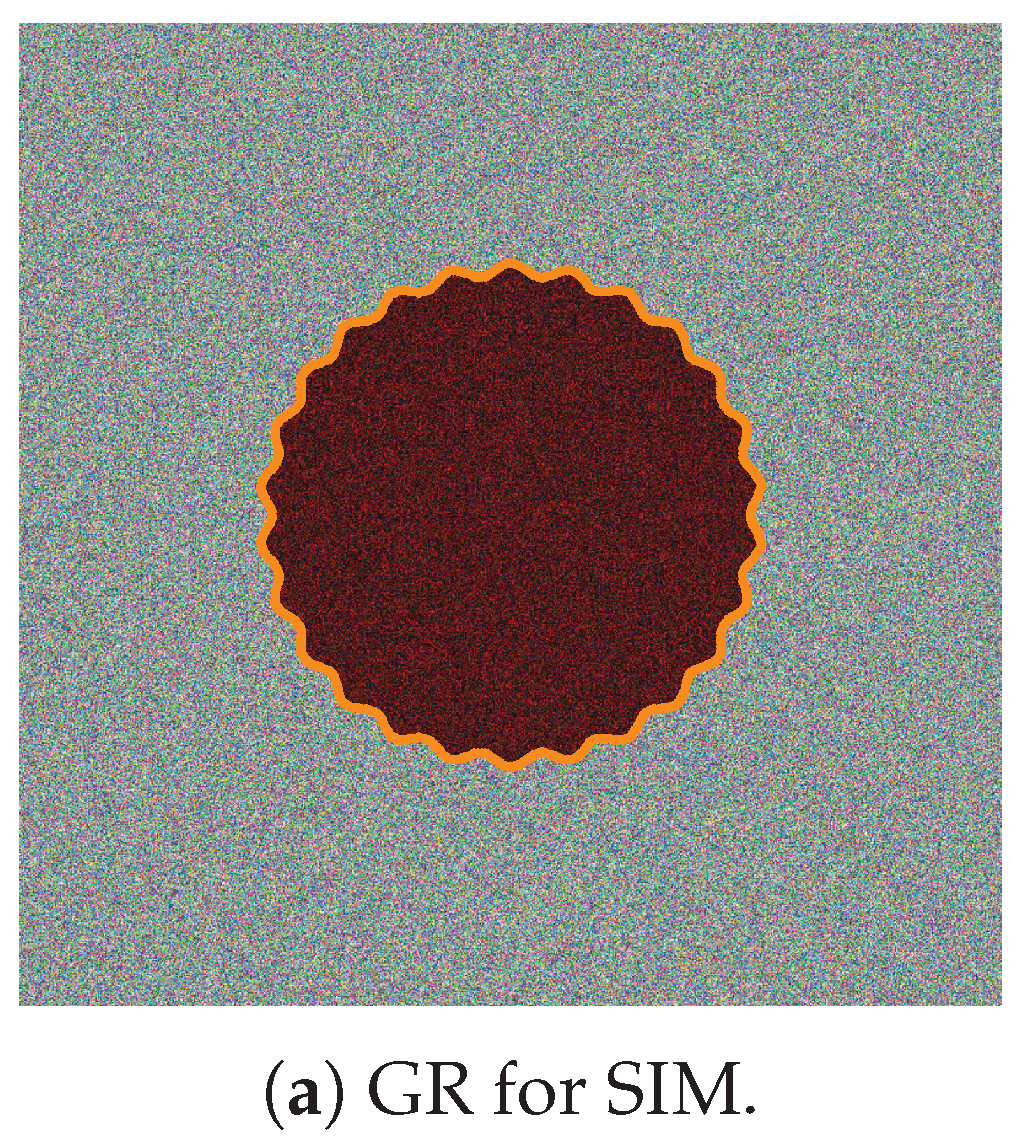
- The ground references (GR) for each image.
- (iv)
- The Gambini algorithm (GA).
- (v)
- The statistical models stipulated through their probability density functions. In this article, we add two models not used in the literature for edge detection.
- (vi)
- Information fusion. We propose a new approach named S-ROC. We use the principal component analysis (PCA) and a threshold to compute each image’s weight in the fusion process.
- (vii)
- We conclude this section by discussing the Hausdorff distance (Hd) as a quality measure.
2. Materials and Methods
2.1. Computational Resources
2.2. Data
- Airborne AIRSAR sensor in L-Band data [15]:
- Airborne Uninhabited Aerial Vehicle Synthetic Aperture Radar (UAVSAR) sensor in L-Band available on [16]:
- OrbiSAR-2 sensor in P-Band image available on [17]:
- (a)
- Sub-scene 01 of Santos City, Brazil (S01) acquired with the airborne OrbiSAR-2 sensor in P-Band (Figure 3a).
- (b)
- Sub-scene 02 of Santos City, Brazil (S02) also acquired with the airborne sensor provides details about the S01 and S02 datasets (Figure 3b). Both images were acquired on 12 August 2015.
2.3. Ground References and Images
2.4. The Gambini Algorithm
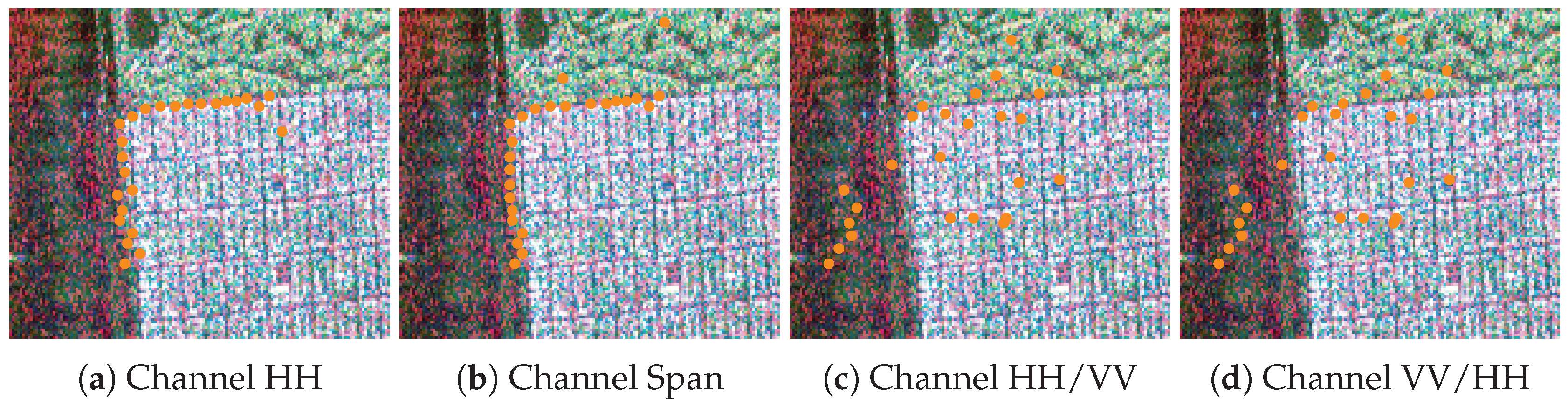
2.5. Distributions
- Gamma univariate PDF for intensities: the distribution of each intensity channel follows a gamma law with probability density functionwhere (rather than to allow for flexibility), is the mean, and is the indicator function of the set A. Given the random sample , its reduced log-likelihood under the Wishart model is
- The density that characterizes the ratio of any pair of intensities iswhere and . We can normalize the ratio of intensities asIf we define , with with and , where is the ratio intensity parameter, then (6) becomesThe reduced log-likelihood function under this model is
- Feng et al. [23] show that the gamma distribution models the span, i.e., the sum of the intensities:where and . The reduced log-likelihood under this model for the random sample is:
2.6. Information Fusion Methods
2.6.1. PCA Fusion Methods
- (i)
- Stack the binary images in column vectors to obtain the matrix .
- (ii)
- Calculate the covariance matrix of .
- (iii)
- Compute the eigenvalues () and corresponding eigenvectors () of the covariance matrix. Sort the eigenvalues and corresponding eigenvectors in decreasing order.
- (iv)
- Compute the vector , where , and is the eigenvalue associated with the eigenvector of ; notice that .
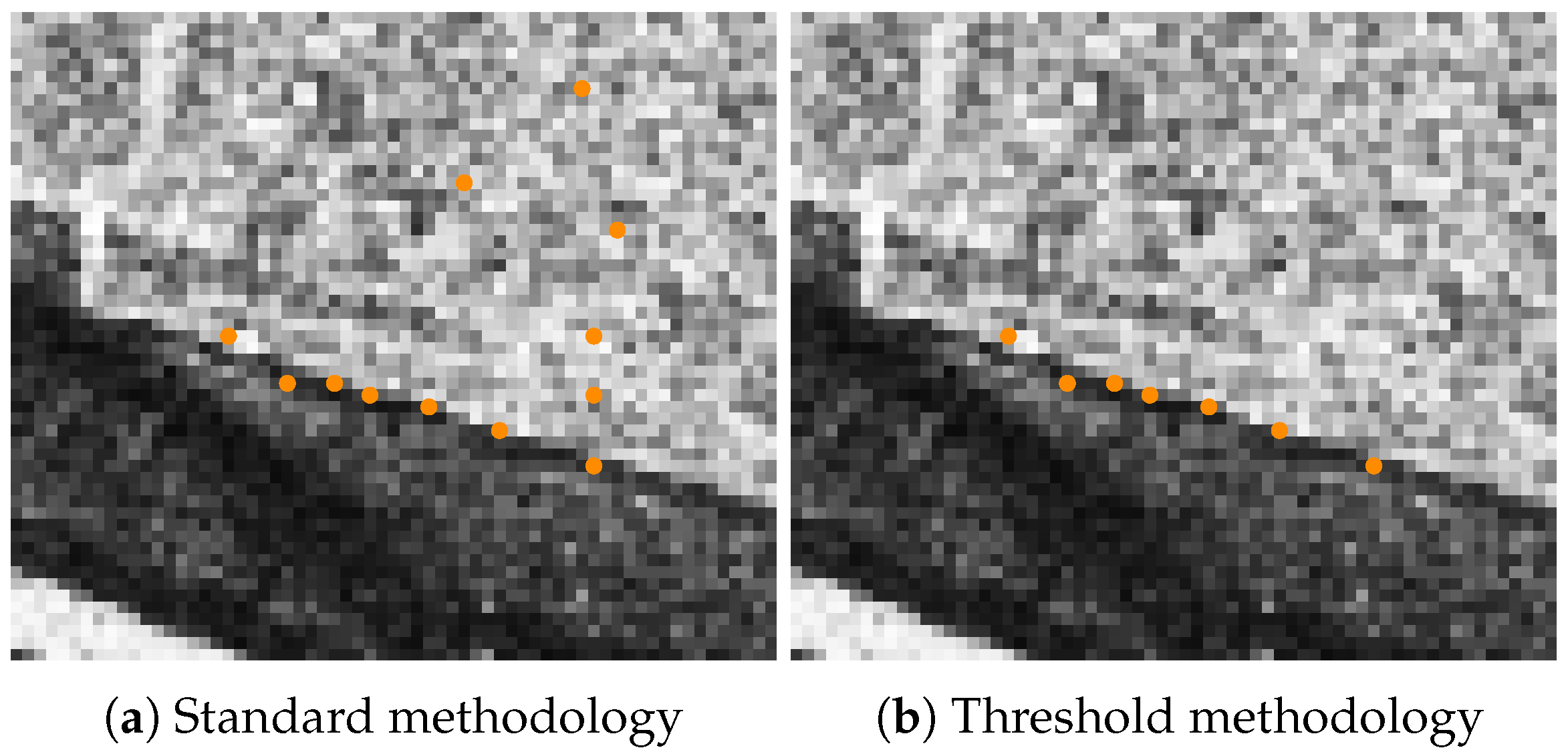
2.6.2. S-ROC and S-ROC Fusion Methods
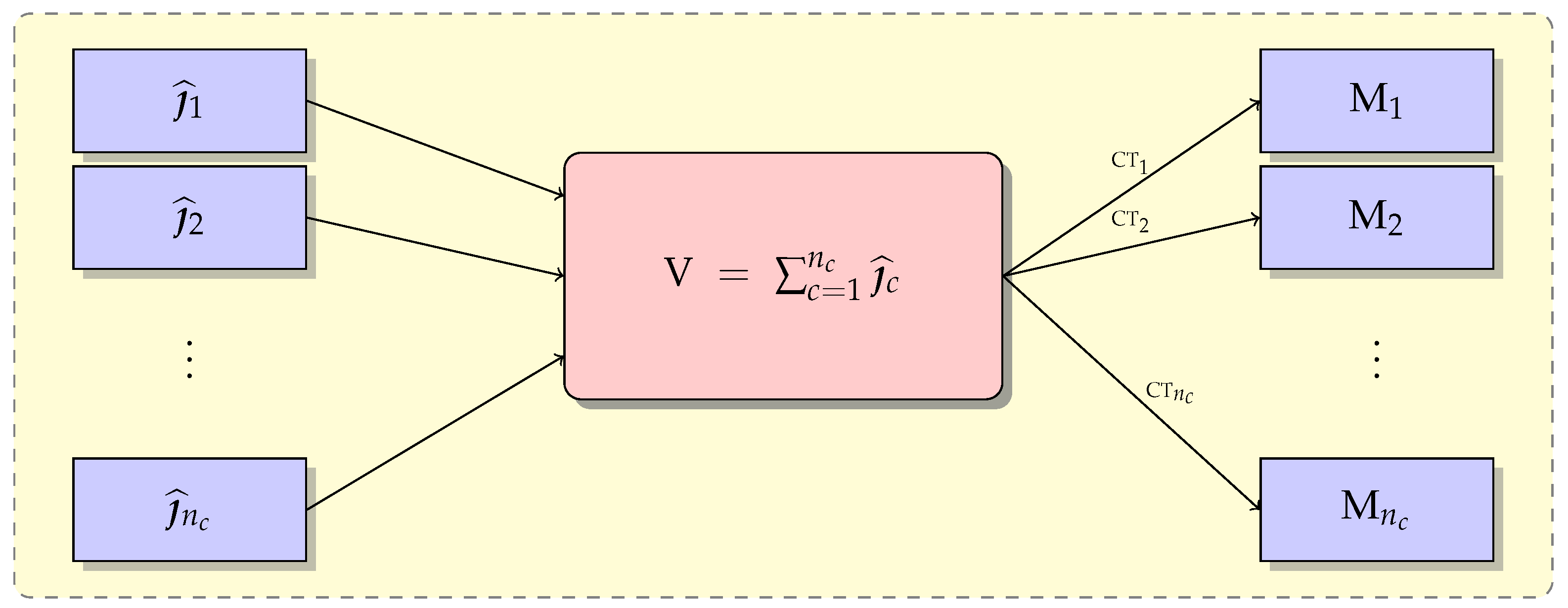
- (i)
- Add the binary images to produce the frequency matrix ().
- (ii)
- Use automatic optimal thresholds ranging from on to generate matrices .
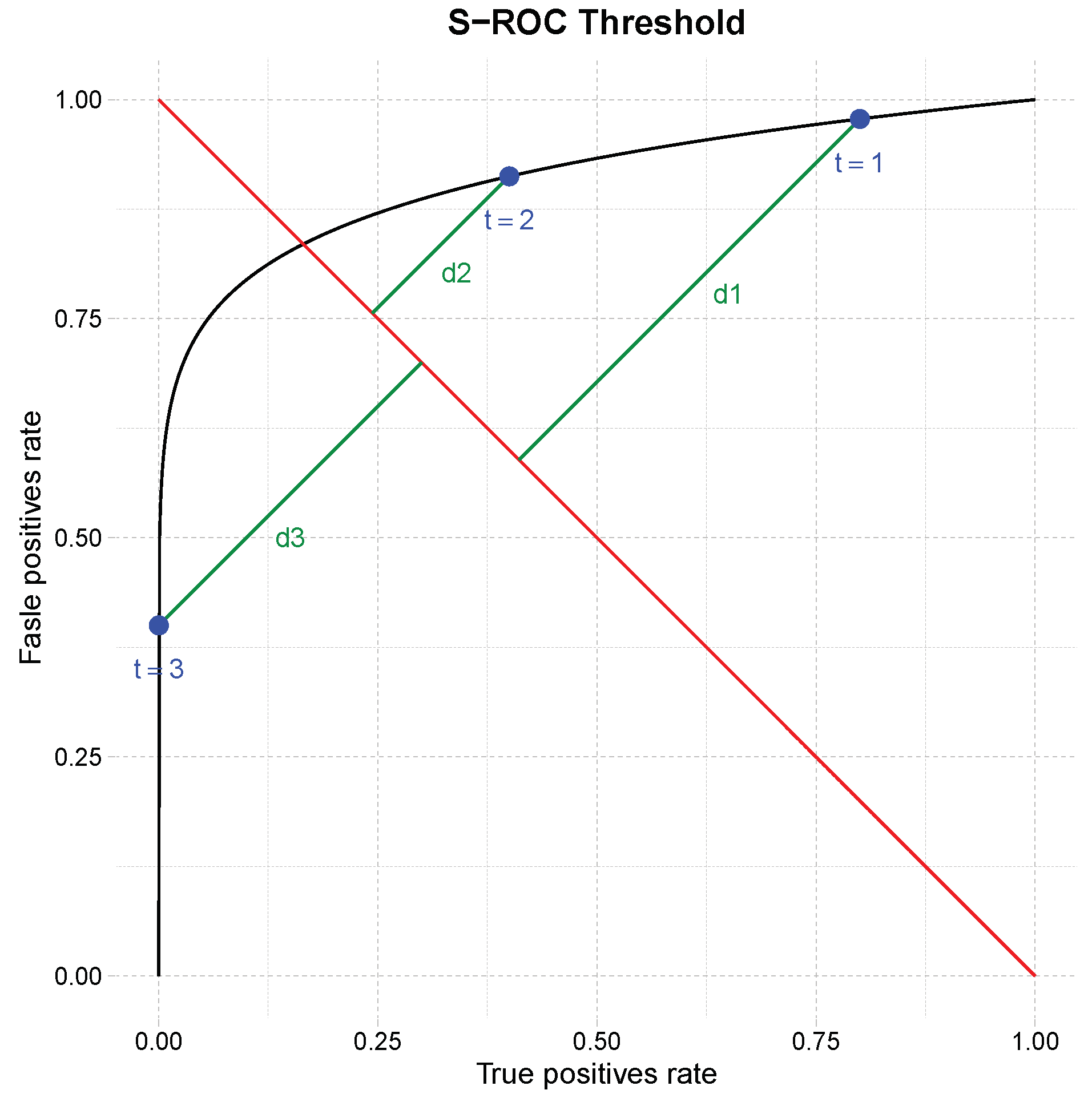
- (iii)
- Compare each with all , find the confusion matrix, and generate the ROC curve. The optimal threshold corresponds to the point of the ROC curve at the smallest Euclidean distance to the diagnostic line.
- (iv)
- Use PCA information to choose the channels that will be fused: only those above a threshold () will enter the S-ROC procedure. We used 10% of the sum of the PCA coefficients as the threshold. We named these methods by S-ROC.
- (v)
- The fusion is the matrix which corresponds to the optimal threshold.
2.7. Measures of Quality
3. Results
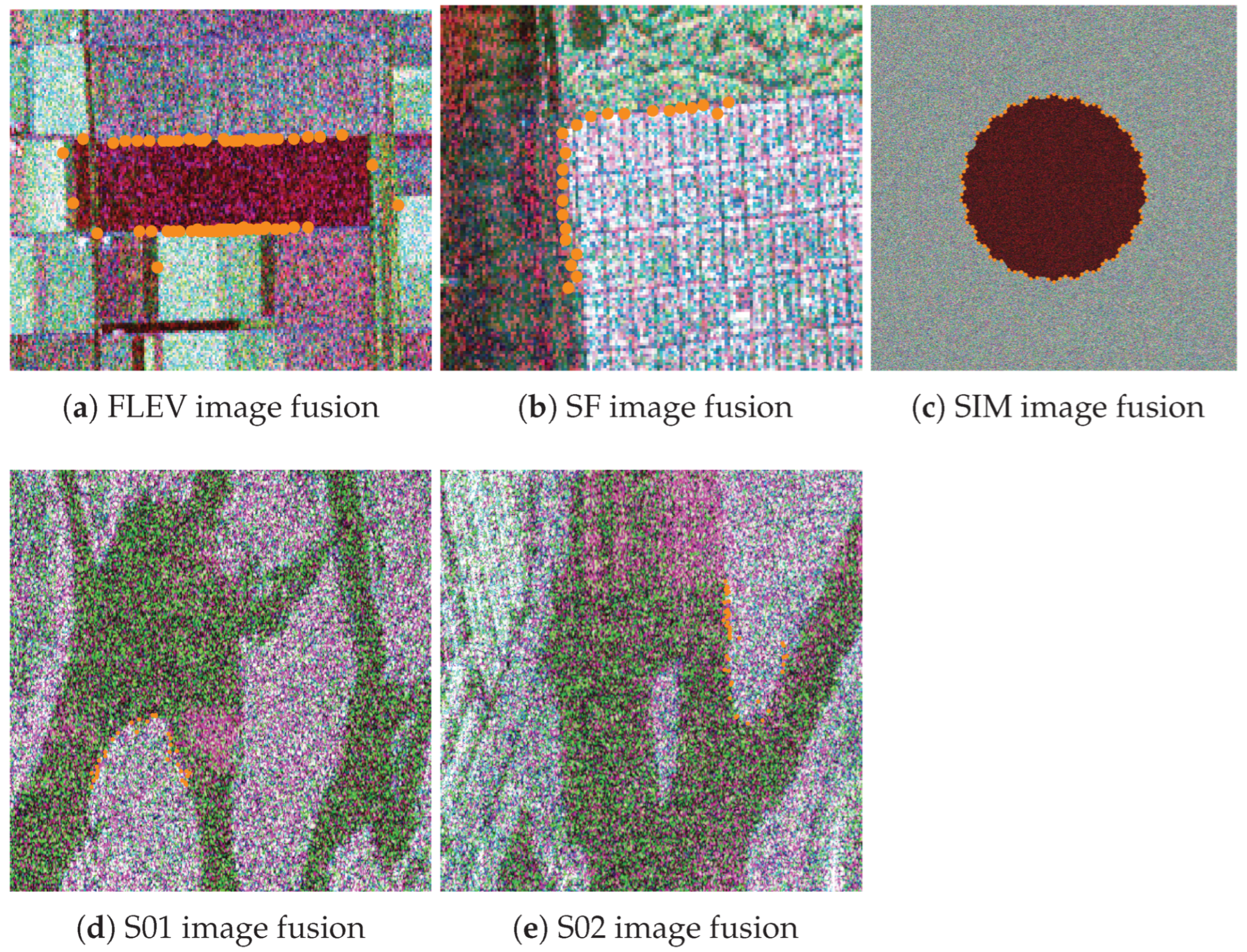
3.1. Flower Simulated Image
3.2. Flevoland Images
3.3. San Francisco Image
3.4. Sub-Scene 01 of Santos City
3.5. Hd Metric Applied to Edge Evidence Estimates
3.6. PCA Analysis
3.7. S-ROC and S-ROC Information Fusion
3.8. Change Detection
4. Discussion
- (i)
- Although the estimation by maximization of the log-likelihood with the BFGS algorithm is stable, it is most sensitive to the initial point with the distribution of ratios. We used the first- and second-order moments estimates with good results.
- (ii)
- Table 2 shows that the PCA method recommends the fusion of the intensities or span channels, except in image S02; we used these channels to build the fusion methods S-ROC.
- (iii)
- The S-ROC method performs best concerning Hd.
- (iv)
- S02 (Figure 1) is a unique data set in which the ratio of intensities contributes to the S-ROC fusion.
- (v)
- S-ROC is better than S-ROC at discarding outliers.
- (vi)
- S-ROC and S-ROC work well in images from various sensors.
- (vii)
- S-ROC rejects false positive detection on homogeneous areas.
- (viii)
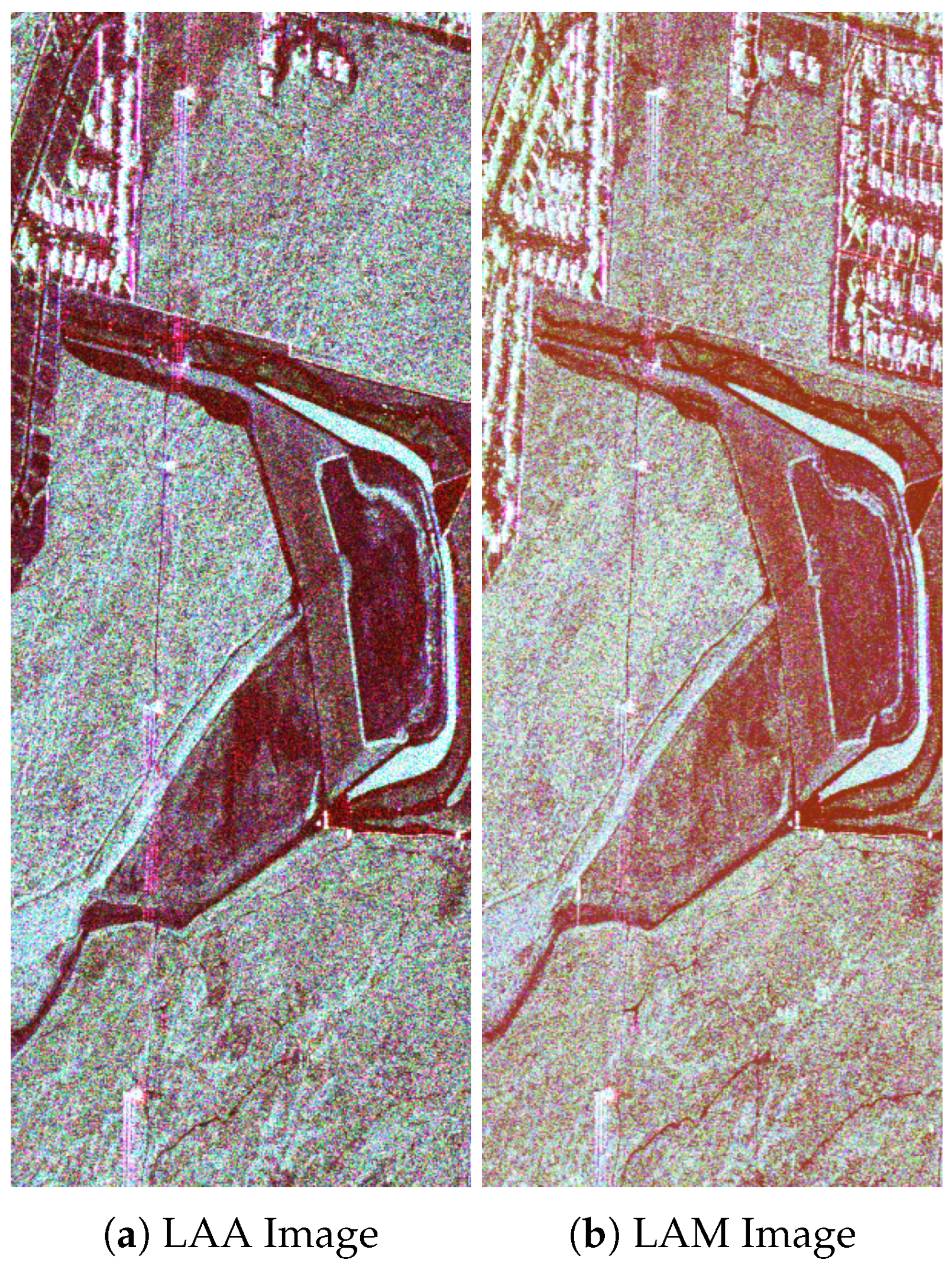
- Figure 16 and Figure 17 show the thresholding results by the likelihood using the HH, and Span channels, and edge detection by S-ROC and S-ROC. These results motivated us to check the change detection in two images of Los Angeles taken from the same region at different times. The result is shown in Figure 18. The visual inspection of Figure 18a (LAA image) and Figure 18b (LAM image) shows the method’s ability to identify changes.
- (ix)
- We used images with different numbers of looks: images S01 and S02 are single-look, while the others have four; our methods present similar performance.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| Probability Density Function | |
| GR | Ground Reference |
| SAR | Synthetic-Aperture Radar |
| PolSAR | Polarimetric Synthetic-Aperture Radar |
| AIRSAR | Airborne Synthetic-Aperture Radar |
| OrbiSAR-2 | Orbital SAR |
| JPL | Jet Propulsion Laboratory |
| UAVSAR | Uninhabited Aerial Vehicle Synthetic-Aperture Radar |
| SIM | Flower Simulated Image |
| FLEV | Flevoland Image |
| SF | San Francisco Image |
| S01 | Sub-scene 01 of Santos City |
| S02 | Sub-scene 02 of Santos City |
| LAA | Los Angeles Image on April 2009 |
| LAM | Los Angeles Image on May 2015 |
| ROI | Region Of Interest |
| MLE | Maximum-Likelihood Estimator |
| BFGS | Broyden–Fletcher–Goldfarb–Shanno |
| GenSA | Generalized Simulated Annealing |
| S-ROC | Statistic Receiver Operating Characteristic |
| S-ROC | Statistic Receiver Operating Characteristic with a threshold |
| PCA | Principal Component Analysis |
| Hd | Hausdorff Distance |
References
- Blake, A.; Isard, M. Active Contours; Springer: Berlin/Heidelberg, Germany, 1998. [Google Scholar]
- Szeliski, R. Computer Vision: Algorithms and Applications, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2022. [Google Scholar]
- Gambini, J.; Mejail, M.; Jacobo-Berlles, J.; Frery, A.C. Feature Extraction in Speckled Imagery using Dynamic B-Spline Deformable Contours under the G0 Model. Int. J. Remote Sens. 2006, 27, 5037–5059. [Google Scholar] [CrossRef]
- Gambini, J.; Mejail, M.; Jacobo-Berlles, J.; Frery, A.C. Accuracy of Edge Detection Methods with Local Information in Speckled Imagery. Stat. Comput. 2008, 18, 15–26. [Google Scholar] [CrossRef]
- Frery, A.C.; Jacobo-Berlles, J.; Gambini, J.; Mejail, M. Polarimetric SAR Image Segmentation with B-Splines and a New Statistical Model. Multidimens. Syst. Signal Process. 2010, 21, 319–342. [Google Scholar] [CrossRef]
- Nascimento, A.D.C.; Horta, M.M.; Frery, A.C.; Cintra, R.J. Comparing Edge Detection Methods Based on Stochastic Entropies and Distances for PolSAR Imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 648–663. [Google Scholar] [CrossRef]
- Naranjo-Torres, J.; Gambini, J.; Frery, A.C. The Geodesic Distance between GI0 Models and its Application to Region Discrimination. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 987–997. [Google Scholar] [CrossRef]
- Girón, E.; Frery, A.C.; Cribari-Neto, F. Nonparametric edge detection in speckled imagery. Math. Comput. Simul. 2012, 82, 2182–2198. [Google Scholar] [CrossRef]
- Borba, A.A.D.; Marengoni, M.; Frery, A.C. Fusion of Evidences in Intensities Channels for Edge Detection in PolSAR Images. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Rey, A.; Revollo Sarmiento, N.; Frery, A.C.; Delrieux, C. Automatic Delineation of Water Bodies in SAR Images with a Novel Stochastic Distance Approach. Remote Sens. 2022, 14, 5716. [Google Scholar] [CrossRef]
- Asokan, A.; Anitha, J. Change detection techniques for remote sensing applications: A survey. Earth Sci. Informatics 2019, 12, 143–160. [Google Scholar] [CrossRef]
- Bouhlel, N.; Akbari, V.; Méric, S. Change Detection in Multilook Polarimetric SAR Imagery with Determinant Ratio Test Statistic. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–15. [Google Scholar] [CrossRef]
- Touzi, R.; Lopes, A.; Bousquet, P. A statistical and geometrical edge detector for SAR images. IEEE Trans. Geosci. Remote Sens. 1988, 26, 764–773. [Google Scholar] [CrossRef]
- Schou, J.; Skriver, H.; Nielsen, A.; Conradsen, K. CFAR edge detector for polarimetric SAR images. IEEE Trans. Geosci. Remote Sens. 2003, 41, 20–32. [Google Scholar] [CrossRef]
- Chapman, B.; Shi., J. CLPX-Airborne: Airborne Synthetic Aperture Radar (AIRSAR) Imagery, Version 1 [Data Set]; NASA National Snow and Ice Data Center Distributed Active Archive Center: Boulder, CO, USA, 2004. [Google Scholar] [CrossRef]
- Bouhlel, N.; Akbari, V.; Méric, S. Change Detection in Multilook Polarimetric SAR Imagery with DRT Statistic. IEEE Dataport 2021. [Google Scholar] [CrossRef]
- Nobre, R.; Rodrigues, A.; Rosa, R.; Medeiros, F.; Feitosa, R.; Estevão, A.; Barros, A. GRSS SAR/PolSAR Database. IEEE Dataport 2017. [Google Scholar] [CrossRef]
- Long, D.G.; Ulaby, F.T. Microwave Radar and Radiometric Remote Sensing; The University of Michigan Press: Norwood, MI, USA, 2014. [Google Scholar]
- Goodman, N.R. Statistical Analysis Based on a Certain Complex Gaussian Distribution (an Introduction). Ann. Math. Stat. 1963, 34, 152–177. [Google Scholar] [CrossRef]
- Lee, J.S.; Hoppel, K.W.; Mango, S.A.; Miller, A.R. Intensity and phase statistics of multilook polarimetric and interferometric SAR imagery. IEEE Trans. Geosci. Remote Sens. 1994, 32, 1017–1028. [Google Scholar] [CrossRef]
- Hagedorn, M.; Smith, P.J.; Bones, P.J.; Millane, R.P.; Pairman, D. A trivariate chi-squared distribution derived from the complex Wishart distribution. J. Multivar. Anal. 2006, 97, 655–674. [Google Scholar] [CrossRef]
- Ferreira, J.A.; Nascimento, A.D.C.; Frery, A.C. PolSAR Models with Multimodal Intensities. Remote Sens. 2022, 14, 5083. [Google Scholar] [CrossRef]
- Feng, Y.; Wen, M.; Zhang, J.; Ji, F.; Ning, G. Sum of arbitrarily correlated Gamma random variables with unequal parameters and its application in wireless communications. In Proceedings of the 2016 International Conference on Computing, Networking and Communications (ICNC), Kauai, HI, USA, 15–18 February 2016; pp. 1–5. [Google Scholar]
- Henningsen, A.; Toomet, O. maxLik: A package for maximum likelihood estimation in R. Comput. Stat. 2011, 26, 443–458. [Google Scholar] [CrossRef]
- Xiang, Y.; Gubian, S.; Suomela, B.; Hoeng, J. Generalized Simulated Annealing for Global Optimization: The GenSA Package. R J. 2013, 5, 13–28. [Google Scholar] [CrossRef]
- Giannarou, S.; Stathaki, T. Optimal edge detection using multiple operators for image understanding. EURASIP J. Adv. Signal Process. 2011, 2011, 28. [Google Scholar] [CrossRef]
- Naidu, V.P.S.; Raol, J.R. Pixel-level Image Fusion using Wavelets and Principal Component Analysis. Def. Sci. J. 2008, 58, 338–352. [Google Scholar] [CrossRef]
- Mitchell, H. Image Fusion: Theories, Techniques and Applications; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Taha, A.A.; Hanbury, A. An Efficient Algorithm for Calculating the Exact Hausdorff Distance. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 2153–2163. [Google Scholar] [CrossRef] [PubMed]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index | Channel (PDF) | FLEV | SF | S01 | S02 | SIM |
|---|---|---|---|---|---|---|
| 1 | Gamma (HH) | 31.78 | 13.60 | 14.86 | 11.18 | 8.24 |
| 2 | Gamma (HV) | 14.00 | 40.04 | 33.37 | 28.00 | 7.61 |
| 3 | Gamma (VV) | 76.00 | 22.00 | 35.84 | 11.66 | 8.06 |
| 4 | Gamma for the span | 52.00 | 29.00 | 10.63 | 9.05 | 7.61 |
| 5 | PDF ratio (HH/HV) | 70.00 | 25.31 | 36.24 | 53.60 | 10.77 |
| 6 | PDF ratio (HH/VV) | 79.00 | 38.00 | 35.84 | 53.03 | 115.10 |
| 7 | PDF ratio (HV/VV) | 37.00 | 29.00 | 37.01 | 44.01 | 12.08 |
| 8 | PDF ratio (HV/HH) | 19.00 | 25.31 | 36.24 | 53.60 | 10.77 |
| 9 | PDF ratio (VV/HV) | 64.00 | 26.47 | 37.01 | 44.01 | 12.08 |
| 10 | PDF ratio (VV/HH) | 79.00 | 38.00 | 37.64 | 51.00 | 115.10 |
| Channel (PDF) | FLEV | SF | S01 | S02 | SIM |
|---|---|---|---|---|---|
| Gamma (HH) | 29.04 | 28.34 | 24.00 | 22.71 | 53.28 |
| Gamma (HV) | 18.86 | 19.95 | 18.78 | 18.21 | 19.90 |
| Gamma (VV) | 17.43 | 18.20 | 15.52 | 15.77 | 12.09 |
| Gamma for the span | 0.19 | 13.47 | 13.91 | 14.69 | 9.06 |
| PDF ratio (HH/HV) | 2.36 | 7.75 | 9.09 | 10.02 | 0.36 |
| PDF ratio (HH/VV) | 8.92 | 5.21 | 8.77 | 8.65 | 0.18 |
| PDF ratio (HV/VV) | 4.55 | 2.66 | 4.54 | 5.07 | 0.00 |
| PDF ratio (HV/HH) | 5.46 | 2.08 | 4.95 | 4.19 | 0.00 |
| PDF ratio (VV/HV) | 5.60 | 1.46 | 4.00 | 0.44 | 0.00 |
| PDF ratio (VV/HH) | 7.53 | 0.40 | 0.00 | 0.22 | 0.00 |
| Fusion | S-ROC | S-ROC | S-ROC |
|---|---|---|---|
| (All Channels) | (Selected Channel) | Channels | |
| FLEV | 32.00 | 23.70 | HH–HV–VV |
| SF | 12.00 | 5.09 | HH–HV–VV–Span |
| S01 | 35.84 | 10.63 | HH–HV–VV–Span |
| S02 | 14.21 | 18.35 | HH–HV–VV–Span–HH/HV |
| SIM | 13.03 | 20.09 | HH–HV–VV |
| Fusion Methods | ||
|---|---|---|
| S-ROC | S-ROC | S-ROC |
| (All Channels) | (Selected Channel) | Channels |
| 7.61 () | HH–HV–VV–Span | |
| 13.03 | 20.09 () | HH–HV–VV |
| 8.24 () | HH | |
| Mean Time [s] | |||
|---|---|---|---|
| Edges Evidence | S-ROC | S-ROC | |
| Image | (All Channels) | (All Channels) | (Selected Channels) |
| FLEV | 3136 | 54 | 5 |
| SF | 656 | 19 | 3 |
| S01 | 645 | 11 | 2 |
| S02 | 975 | 12 | 3 |
| SIM | 15375 | 45 | 4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
De Borba, A.A.; Muhuri, A.; Marengoni, M.; Frery, A.C. Feature Selection for Edge Detection in PolSAR Images. Remote Sens. 2023, 15, 2479. https://doi.org/10.3390/rs15092479
De Borba AA, Muhuri A, Marengoni M, Frery AC. Feature Selection for Edge Detection in PolSAR Images. Remote Sensing. 2023; 15(9):2479. https://doi.org/10.3390/rs15092479
Chicago/Turabian StyleDe Borba, Anderson A., Arnab Muhuri, Mauricio Marengoni, and Alejandro C. Frery. 2023. "Feature Selection for Edge Detection in PolSAR Images" Remote Sensing 15, no. 9: 2479. https://doi.org/10.3390/rs15092479
APA StyleDe Borba, A. A., Muhuri, A., Marengoni, M., & Frery, A. C. (2023). Feature Selection for Edge Detection in PolSAR Images. Remote Sensing, 15(9), 2479. https://doi.org/10.3390/rs15092479