
Research on Photon-Integrated Interferometric Remote Sensing Image Reconstruction Based on Compressed Sensing



Abstract
1. Introduction
- (1)
- We improved the traditional OMP algorithm and proposed the TL-GOMP algorithm, which was used to reconstruct the sparse spatial frequency information collected by the PIC and recover the content information of the detected target. In the simulation, we compared the TL-GOMP algorithm with the other improved OMP image reconstruction algorithm from the same series and the non-OMP image reconstruction algorithm, and subsequently verified its superiority in image reconstruction.
- (2)
- Simultaneously, we used this algorithm to reconstruct and simulate the sparse signals collected by photonic integrated chips at different distances. The simulation results showed that the TL-GOMP algorithm can be applied in the field of photon-integrated interferometric remote sensing detection and imaging to recover the content information of unknown targets.
2. Related Work
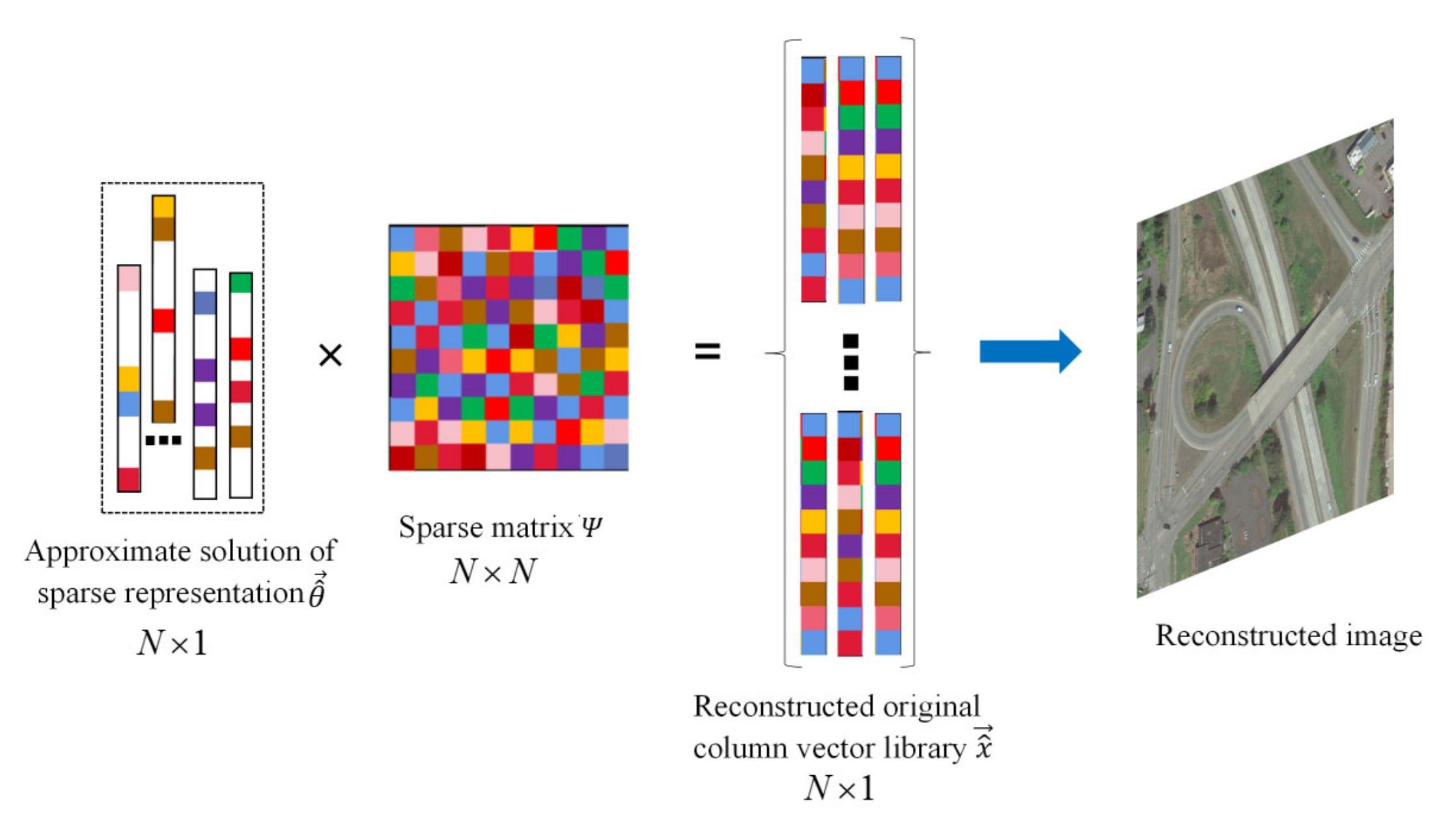
2.1. Sparse Signal Representation
2.2. Design of Measurement Matrix
2.3. Design of Reconstruction Algorithm
2.3.1. Traditional Iterative Compressed Sensing Reconstruction Algorithm
2.3.2. Reconstruction Algorithm Based on Deep Compressed Sensing Network
3. Methods
3.1. The Reconstruction Principle of the OMP Algorithm Based on Compressed Sensing
| Algorithm 1: Orthogonal Matching Pursuit |
| Input: Sensor matrix B, Sparseness k |
| Output: |
| Initialize: , , t = 1 |
| Loop performs the following five steps: (1) ; (2) Update the index set: ; Reconstruction of atomic collection: ; (3) Least-squares method:; (4) Update the residual: ; (5) Judgment: If t > k, stop the iteration, or go to step (1). |
3.2. The Reconstruction Principle of the TL-GOMP Algorithm Based on Compressed Sensing
| Algorithm 2: Threshold Limited–Generalized Orthogonal Matching Pursuit |
| Input: Sensor matrix B, Sparseness k |
| Output: |
| Initialize:, t = 1 |
| Loop performs the following five steps: ; ; (3) Least-squares method: ; ; (5) Judgment: If t > k, stop the iteration, or go to step (1). |
4. Experiments
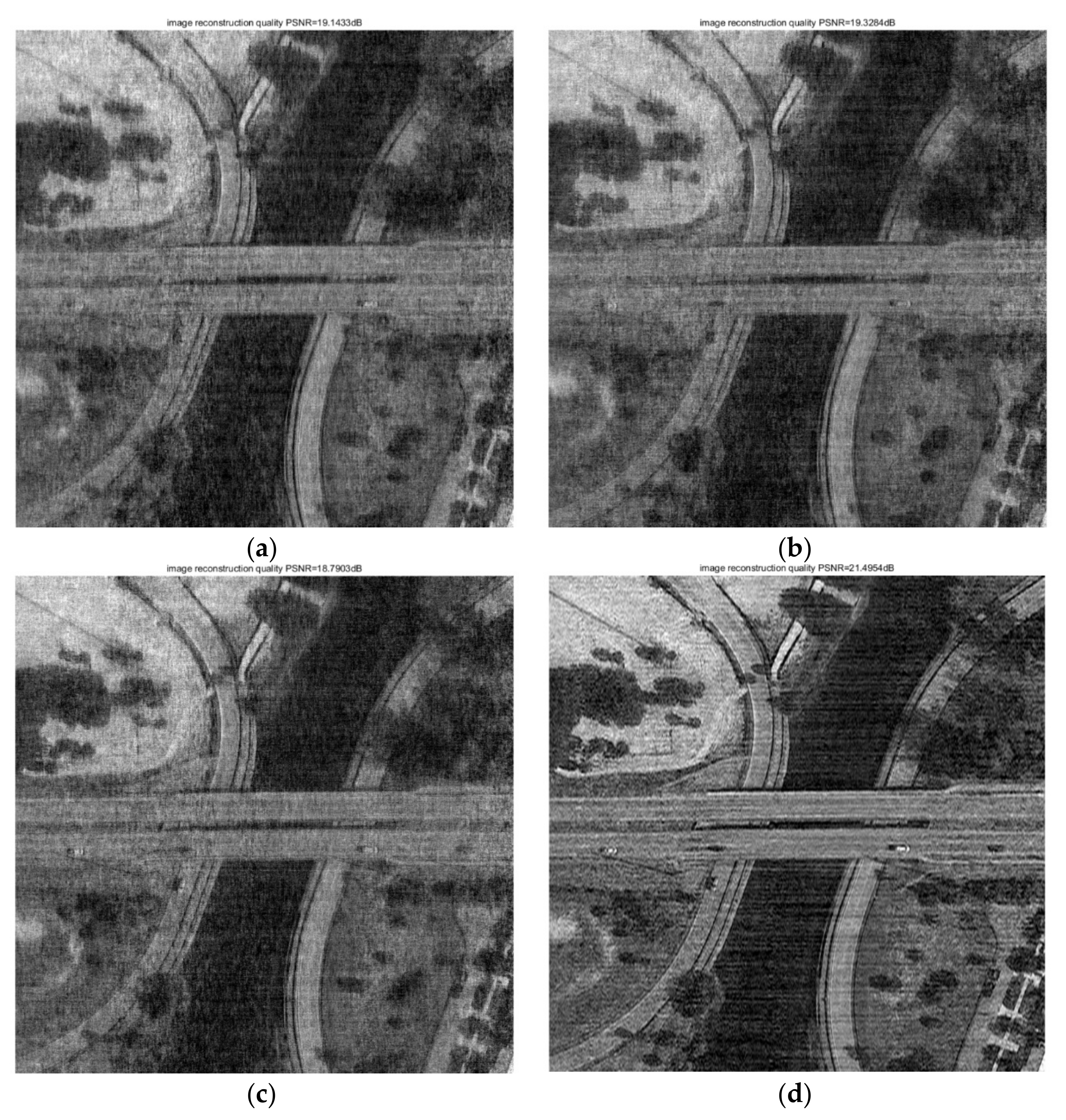
4.1. Comparison of Simulation Results of the TL-GOMP and OMP Series Algorithms
4.2. Comparison of Simulation Results of the TL-GOMP and Other Algorithms
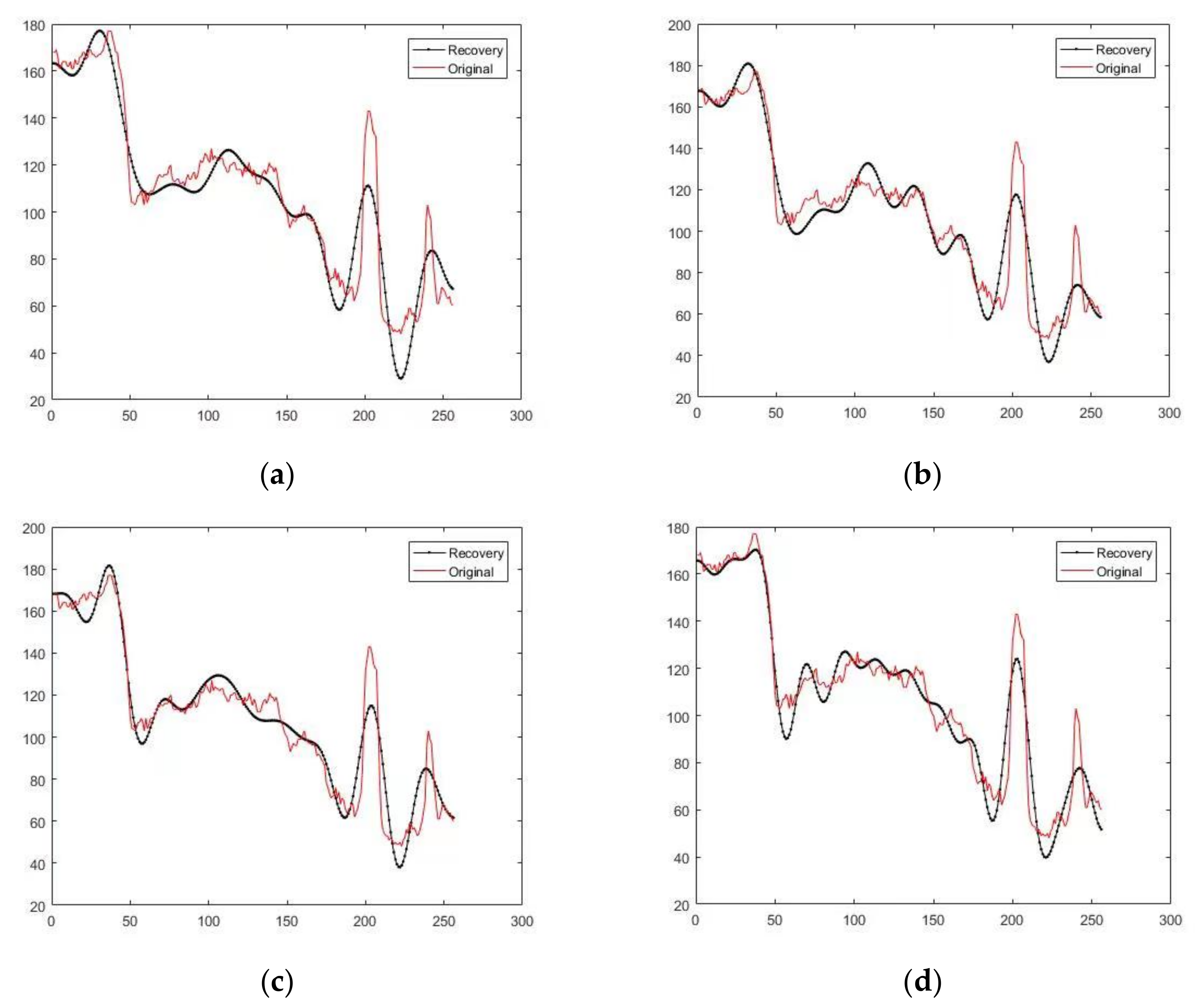
4.3. Simulation Results of Single-Column Signal Reconstruction by the CS TL-GOMP Algorithm
4.4. Simulation Results of the CS TL-GOMP Algorithm in Image Reconstruction at Different Distances
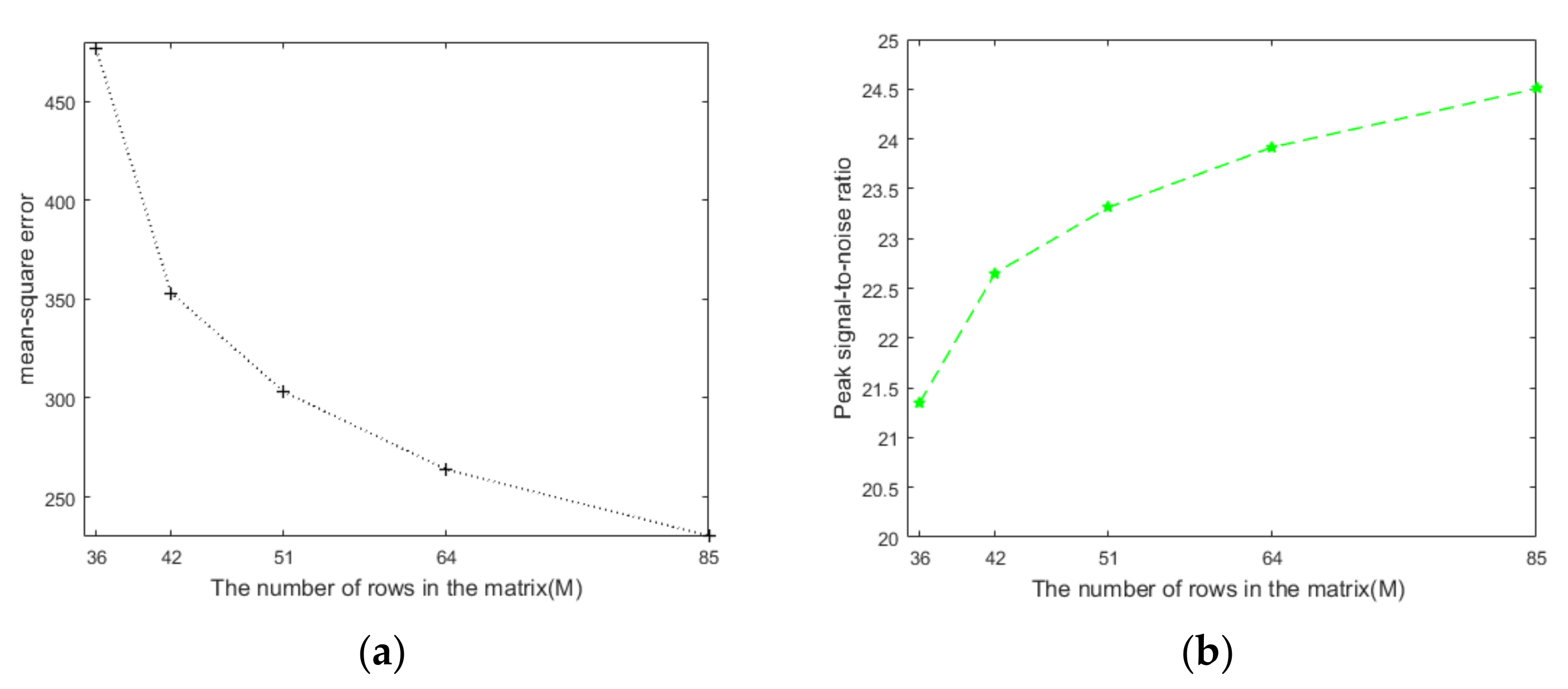
4.5. Influence of Measurement Number M in the CS TL-GOMP Algorithm
4.6. Influence of Measurement Matrix M × N and Sparsity k in the CS TL-GOMP Algorithm on the Quality of the Reconstructed Image
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ogden, C.; Wilm, J.; Stubbs, D.M.; Thurman, S.T.; Su, T.; Scott, R.P.; Yoo, S.J.B. Flat panel space based space surveillance sensor. In Proceedings of the Advanced Maui Optical and Space Surveillance Technologies (AMOS) Conference, Maui, HI, USA, 10–13 September 2013. [Google Scholar]
- Su, T.H.; Liu, G.Y.; Badham, K.E.; Thurman, S.T.; Kendrick, R.L.; Duncan, A.; Wuchenich, D.; Ogden, C.; Chriqui, G.; Feng, S.; et al. Interferometric imaging using Si3N4 photonic integrated circuits for a SPIDER imager. Opt. Express 2018, 26, 12801–12812. [Google Scholar] [CrossRef] [PubMed]
- Aufdenberg, J.; Mérand, A.; Foresto, V.C.D.; Absil, O.; Di Folco, E.; Kervella, P.; Ridgway, S.; Berger, D.; Brummelaar, T.T.; McAlister, H. First results from the CHARA Array. VII. Long-baseline interferometric measurements of Vega consistent with a pole-on, rapidly rotating star. Astrophys. J. 2006, 645, 664–675. [Google Scholar] [CrossRef]
- Brummelaar, T.A.; McAlister, H.A.; Ridgway, S.T.; Bagnuolo, W.G., Jr.; Turner, N.H.; Sturmann, L.; Sturmann, J.; Berger, D.H.; Ogden, C.E.; Cadman, R.; et al. First Results from the CHARA Array. II. A Description of the Instrument. Astrophys. J. 2005, 628, 453–465. [Google Scholar] [CrossRef]
- Petrov, R.G.; Malbet, F.; Weigelt, G.; Antonelli, P.; Beckmann, U.; Bresson, Y.; Chelli, A.; Dugué, M.; Duvert, G.; Gennari, S.; et al. AMBER, the near-infrared spectro-interferometric three-telescope VLTI instrument. Astron. Astrophys. 2007, 464, 1–12. [Google Scholar] [CrossRef]
- Armstrong, J.T.; Mozurkewich, D.; Rickard, L.J.; Hutter, D.J.; Benson, J.A.; Bowers, P.; Elias, N., II; Hummel, C.; Johnston, K.; Buscher, D.; et al. The navy prototype optical interferometer. Astrophys. J. 1998, 496, 550–571. [Google Scholar] [CrossRef]
- Pearson, T.; Readhead, A. Image formation by self-calibration in radio astronomy. Annu. Rev. Astron. Astrophys. 1984, 22, 97–130. [Google Scholar] [CrossRef]
- Badham, K.; Kendrick, R.L.; Wuchenich, D.; Ogden, C.; Chriqui, G.; Duncan, A.; Thurman, S.T.; Su, T.; Lai, W.; Chun, J.; et al. Photonic integrated circuit-based imaging system for SPIDER. In Proceedings of the 2017 Conference on Lasers and Electro-Optics Pacific Rim (CLEO-PR), Singapore, 31 July–4 August 2017. [Google Scholar]
- Scott, R.P.; Su, T.; Ogden, C.; Thurman, S.T.; Kendrick, R.L.; Duncan, A.; Yu, R.; Yoo, S. Demonstration of a photonic integrated circuit for multi-baseline interferometric imaging. In Proceedings of the 2014 IEEE Photonics Conference (IPC), San Diego, CA, USA, 12–16 October 2014; pp. 1–2. [Google Scholar]
- Mishali, M.; Eldar, Y.C. From theory to practice: Sub-Nyquist sampling of sparse wideband analog signals. IEEE J. Sel. Top. Signal Process. 2010, 4, 375–391. [Google Scholar] [CrossRef]
- Hariri, A.; Babaie-Zadeh, M. Compressive detection of sparse signals in additive white Gaussian noise without signal reconstruction. Signal Process. 2017, 131, 376–385. [Google Scholar] [CrossRef]
- Usala, J.D.; Maag, A.; Nelis, T.; Gamez, G. Compressed sensing spectral imaging for plasma optical emission spectroscopy. J. Anal. At. Spectrom. 2016, 31, 2198–2206. [Google Scholar] [CrossRef]
- Chen, Y.; Ye, X.; Huang, F. A novel method and fast algorithm for MR image reconstruction with significantly under-sampled data. Inverse Probl. Imaging 2017, 4, 223–240. [Google Scholar] [CrossRef]
- Lv, S.T.; Liu, J. A novel signal separation algorithm based on compressed sensing for wideband spectrum sensing in cognitive radio networks. Int. J. Commun. Syst. 2014, 27, 2628–2641. [Google Scholar] [CrossRef]
- Bu, H.; Tao, R.; Bai, X.; Zhao, J. A novel SAR imaging algorithm based on compressed sensing. IEEE Geosci. Remote Sens. Lett. 2017, 12, 1003–1007. [Google Scholar] [CrossRef]
- He, Z.; Zhao, X.; Zhang, S.; Ogawa, T.; Haseyama, M. Random combination for information extraction in compressed sensing and sparse representation-based pattern recognition. Neurocomputing 2014, 145, 160–173. [Google Scholar] [CrossRef]
- Kajbaf, H.; Case, J.T.; Yang, Z.; Zheng, Y.R. Compressed sensing for SAR-based wideband three-dimensional microwave imaging system using non-uniform fast Fourier transform. IET Radar Sonar Navig. 2013, 7, 658–670. [Google Scholar] [CrossRef]
- Li, Q.; Han, Y.H.; Dang, J.W. Image decomposing for inpainting using compressed sensing in DCT domain. Front. Comput. Sci. 2014, 8, 905–915. [Google Scholar] [CrossRef]
- Zhang, J.; Xia, L.; Huang, M.; Li, G. Image reconstruction in compressed sensing based on single-level DWT. In Proceedings of the IEEE Workshop on Electronics, Computer & Applications, Ottawa, ON, Canada, 8–9 May 2014. [Google Scholar]
- Monajemi, H.; Jafarpour, S.; Gavish, M.; Stat 330/CME 362 Collaboration Donoho; Donoho, D.L.; Ambikasaran, S.; Bacallado, S.; Bharadia, D.; Chen, Y.; Choi, Y.; et al. Deterministic matrices matching the compressed sensing phase transitions of Gaussian random matrices. Proc. Natl. Acad. Sci. USA 2013, 110, 1181–1186. [Google Scholar] [CrossRef]
- Lu, W.; Li, W.; Kpalma, K.; Ronsin, J. Compressed sensing performance of random Bernoulli matrices with high compression ratio. IEEE Signal Process. Lett. 2015, 22, 1074–1078. [Google Scholar]
- Li, X.; Zhao, R.; Hu, S. Blocked polynomial deterministic matrix for compressed sensing. In Proceedings of the International Conference on Wireless Communications Networking & Mobile Computing, Chengdu, China, 23–25 September 2010. [Google Scholar]
- Yan, T.; Lv, G.; Yin, K. Deterministic sensing matrices based on multidimensional pseudo-random sequences. Circ. Syst. Signal Process. 2014, 33, 1597–1610. [Google Scholar]
- Boyd, S.; Vandenberghe, L. Convex optimization. IEEE Trans. Autom. Control 2006, 51, 1859. [Google Scholar]
- Mota, J.F.; Xavier, J.M.; Aguiar, P.M.; Puschel, M. Distributed basis pursuit. IEEE Trans. Signal Process. 2012, 60, 1942–1956. [Google Scholar] [CrossRef]
- Lee, J.; Choi, J.W.; Shim, B. Sparse signal recovery via tree search matching pursuit. J. Commun. Netw. 2016, 18, 699–712. [Google Scholar] [CrossRef]
- Wang, R.; Zhang, J.; Ren, S.; Li, Q. A reducing iteration orthogonal matching pursuit algorithm for compressive sensing. Tsinghua Sci. Technol. 2016, 21, 71–79. [Google Scholar] [CrossRef]
- Sahoo, S.K.; Makur, A. Signal recovery from random measurements via extended orthogonal matching pursuit. IEEE Trans. Signal Process 2015, 63, 2572–2581. [Google Scholar] [CrossRef]
- Tropp, J.A.; Gilbert, A.C. Signal recovery from random measurements via orthogonal matching pursuit. IEEE Trans. Inf. Theory 2007, 53, 4655–4666. [Google Scholar] [CrossRef]
- Hu, Z.; Liang, D.; Xia, D.; Zheng, H. Compressing sampling in computed tomography: Method and application. Nucl. Instrum. Methods Phys. Res. 2014, 748, 26–32. [Google Scholar] [CrossRef]
- Shang, F.F.; Li, K.Y. The Application of Wavelet Transform to Breast-Infrared Images. Cogn. Inform. 2006, 2, 939–943. [Google Scholar]
- Rubinstein, R.; Brucktein, A.M.; Elad, M. Dictionaries for sparse representation modeling. Proc. IEEE 2010, 98, 1045–1057. [Google Scholar] [CrossRef]
- He, J.; Wang, T.; Wang, C.; Chen, Y. Improved Measurement Matrix Construction with Random Sequence in Compressed Sensing. Wirel. Pers. Commun. 2022, 123, 3003–3024. [Google Scholar] [CrossRef]
- Wang, X.; Cui, G.; Wang, L.; Jia, X.L.; Nie, W. Construction of measurement matrix in compressed sensing based on balanced Gold sequence. Chin. J. Sci. Instrum. 2014, 35, 97–102. [Google Scholar]
- Xu, G.; Xu, Z. Compressed sensing matrices from Fourier matrices. IEEE Trans. Inf. Theory 2015, 61, 469–478. [Google Scholar] [CrossRef]
- Lum, D.J.; Knarr, S.H.; Howell, J.C. Fast Hadamard transforms for compressive sensing of joint systems: Measurement of a 3.2 million-demensional bi-photon probability distribution. Opt. Express 2015, 23, 27636–27649. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Wang, K.; Wang, Q.Y.; Liang, R.; Zuo, J.; Zhao, L.; Zou, C. Deterministic Random Measurement Matrices Construction for Compressed Sensing. J. Signal Process. 2014, 30, 436–442. [Google Scholar]
- Narayanan, S.; Sahoo, S.; Makur, A. Greedy pursuits assisted basis pursuit for reconstruction of joint-sparse signals. Signal Process. 2018, 142, 485–491. [Google Scholar] [CrossRef]
- Figueiredo, M.A.T.; Nowak, R.D.; Wright, S.J. Gradient Projection for Sparse Reconstruction: Application to Compressed Sensing and Other Inverse Problems. IEEE J. Sel. Top. Signal Process. 2008, 1, 586–597. [Google Scholar] [CrossRef]
- Ji, S.H.; Xue, Y.; Carin, L. Bayesian compressive sensing. IEEE Trans. Signal Process. 2008, 56, 2346–2356. [Google Scholar] [CrossRef]
- Zhang, J.; Liu, S.; Xiong, R.; Ma, S.; Zhao, D. Improved total variation based image compressive sensing recovery by nonlocal regularization. In Proceedings of the 2013 IEEE International Symposium on Circuits and Systems (ISCAS), Beijing, China, 19–23 May 2013; pp. 2836–2839. [Google Scholar]
- Kulkarni, K.; Lohit, S.; Turaga, P.; Kerviche, R.; Ashok, A. Reconnet: Non-iterative reconstruction of images from compressively sensed measurements. In Proceedings of the Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2016; pp. 449–458. [Google Scholar]
- Yao, H.; Dai, F.; Zhang, D.; Ma, Y.; Zhang, S.; Zhang, Y.; Tian, Q. DR 2 -Net: Deep Residual Reconstruction Network for Image Compressive Sensing. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Lohit, S.; Kulkarni, K.; Kerviche, R.; Turaga, P.; Ashok, A. Convolutional neural networks for noniterative reconstruction of compressively sensed images. IEEE Trans. Comput. Imaging 2018, 4, 326–340. [Google Scholar] [CrossRef]
- Du, J.; Xie, X.; Wang, C.; Shi, G.; Xu, X.; Wang, Y. Fully convolutional measurement network for compressive sensing image reconstruction. Neurocomputing 2019, 328, 105–112. [Google Scholar] [CrossRef]
- Nie, G.; Fu, Y.; Zheng, Y.; Huang, H. Image Restoration from Patch-based Compressed Sensing Measurement. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Shi, W.; Jiang, F.; Zhang, S.; Zhao, D. Deep networks for compressed image sensing. In Proceedings of the 2017 IEEE International Conference on Multimedia and Expo (ICME), Hong Kong, China, 10–14 July 2017; pp. 877–882. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| OMP | STOMP | GOMP | TL-GOMP | |
|---|---|---|---|---|
| PSNR (dB) | 18.1671 | 18.4884 | 18.2944 | 21.1882 |
| MSE | 991.6670 | 920.9654 | 963.0243 | 494.6024 |
| Running time (s) | 3.3577 | 1.7663 | 2.7278 | 2.5031 |
| OMP | STOMP | GOMP | TL-GOMP | |
|---|---|---|---|---|
| PSNR (dB) | 18.5193 | 18.5506 | 18.5136 | 21.856 |
| MSE | 914.4386 | 907.8610 | 915.6401 | 424.1134 |
| Running time (s) | 6.7739 | 3.2574 | 5.5594 | 5.6994 |
| OMP | STOMP | GOMP | TL-GOMP | |
|---|---|---|---|---|
| PSNR (dB) | 18.9683 | 18.9774 | 18.6246 | 21.8993 |
| MSE | 824.6088 | 822.8859 | 892.5204 | 419.9057 |
| Running time (s) | 12.1603 | 5.5557 | 12.0085 | 11.5920 |
| OMP | STOMP | GOMP | TL-GOMP | |
|---|---|---|---|---|
| PSNR (dB) | 19.1433 | 19.3284 | 18.7903 | 21.4954 |
| MSE | 792.0467 | 759.0033 | 859.1182 | 460.8311 |
| Running time (s) | 18.8039 | 8.7040 | 22.8444 | 23.6628 |
| 350 × 350 Pixel Values | 500 × 500 Pixel Values | 650 × 650 Pixel Values | 800 × 800 Pixel Values | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| PSNR | MSE | Time | PSNR | MSE | Time | PSNR | MSE | Time | PSNR | MSE | Time |
| 21.3302 | 478.6986 | 3.0450 | 21.9785 | 412.3144 | 5.7769 | 21.7634 | 433.2510 | 12.1419 | 21.4110 | 469.8728 | 24.8091 |
| 21.3607 | 475.3485 | 2.4762 | 21.8199 | 427.6476 | 5.7062 | 21.8976 | 420.0683 | 12.2621 | 21.1822 | 495.2878 | 24.8688 |
| 21.2495 | 487.6785 | 2.4810 | 21.6895 | 440.6868 | 5.7678 | 21.7275 | 436.8474 | 16.2619 | 21.3847 | 472.7259 | 24.6147 |
| 21.3407 | 477.5455 | 2.4567 | 21.9302 | 416.9279 | 5.6955 | 21.9430 | 415.7013 | 12.2062 | 21.2746 | 484.8612 | 24.4856 |
| 21.1693 | 496.7621 | 2.4414 | 21.6719 | 442.4760 | 5.7021 | 21.9532 | 414.7298 | 12.2592 | 21.2543 | 487.1404 | 24.2110 |
| 21.2787 | 484.4030 | 2.4960 | 21.7925 | 430.3612 | 5.8279 | 21.8741 | 422.3505 | 15.7850 | 21.2940 | 482.7085 | 24.5258 |
| 21.2071 | 492.4605 | 2.4652 | 21.8286 | 426.7995 | 5.6639 | 21.7166 | 437.9442 | 15.4912 | 21.3495 | 476.5711 | 24.5294 |
| 21.3974 | 471.3456 | 2.4356 | 21.8625 | 423.4784 | 5.6723 | 21.6169 | 448.1164 | 15.5665 | 21.1921 | 494.1608 | 24.6656 |
| 21.2362 | 489.1702 | 2.4730 | 21.8421 | 425.4695 | 5.6400 | 21.7768 | 431.9201 | 14.7710 | 21.2277 | 490.1291 | 23.7997 |
| 21.1882 | 494.6024 | 2.5031 | 21.8560 | 424.1134 | 5.6994 | 21.8993 | 419.9057 | 11.5920 | 21.4954 | 460.8311 | 23.6628 |
| PSNR Mean: 21.2758 MSE Mean: 484.8015 | PSNR Mean: 21.8272 MSE Mean: 427.0275 | PSNR Mean: 21.8168 MSE Mean: 428.0835 | PSNR Mean: 21.3066 MSE Mean: 481.4289 | ||||||||
| 350 × 350 Pixel Values | 500 × 500 Pixel Values | 650 × 650 Pixel Values | 800 × 800 Pixel Values | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| PSNR | MSE | Time | PSNR | MSE | Time | PSNR | MSE | Time | PSNR | MSE | Time |
| 18.1671 | 991.6670 | 3.9888 | 18.4080 | 938.1606 | 7.5859 | 18.9861 | 821.2361 | 12.3038 | 19.0968 | 800.5658 | 20.3478 |
| 18.2682 | 968.8629 | 3.2198 | 18.5454 | 908.9571 | 7.7925 | 18.9347 | 831.0171 | 12.5650 | 19.1620 | 788.6510 | 21.0002 |
| 18.3101 | 959.5554 | 3.4737 | 18.4466 | 929.8707 | 7.2411 | 18.9399 | 830.0296 | 12.5509 | 19.2571 | 771.5568 | 20.4160 |
| 18.3829 | 943.6068 | 3.6291 | 18.5152 | 915.3030 | 7.1395 | 19.1091 | 798.3158 | 12.4553 | 19.0280 | 813.3486 | 20.9783 |
| 18.0393 | 1021.3 | 3.6883 | 18.4265 | 934.1821 | 7.7281 | 18.9553 | 827.0812 | 12.3023 | 19.2065 | 780.6037 | 22.2521 |
| 18.2515 | 972.5983 | 3.2354 | 18.5735 | 903.0985 | 7.4901 | 18.9398 | 830.0348 | 12.4164 | 19.1368 | 793.2272 | 20.6466 |
| 18.3869 | 942.7279 | 3.2961 | 18.6313 | 891.1402 | 7.5999 | 19.0351 | 812.0306 | 12.4421 | 19.0966 | 800.6090 | 20.4755 |
| 18.2823 | 965.7220 | 3.2445 | 18.6419 | 888.9868 | 6.7575 | 18.8986 | 837.9640 | 12.5608 | 19.1766 | 785.9948 | 20.5140 |
| 18.2712 | 968.1929 | 3.2312 | 18.6113 | 895.2566 | 6.7414 | 19.0885 | 802.0964 | 12.4971 | 19.1135 | 797.4937 | 19.9576 |
| 18.1671 | 991.6670 | 3.3577 | 18.5193 | 914.4386 | 6.7739 | 18.9683 | 824.6088 | 12.1603 | 19.1433 | 792.0467 | 18.8039 |
| PSNR Mean: 18.2523 MSE Mean: 972.5902 | PSNR Mean: 18.5319 MSE Mean: 911.9394 | PSNR Mean: 18.9855 MSE Mean: 821.4414 | PSNR Mean: 19.1417 MSE Mean: 792.4097 | ||||||||
| 350 × 350 Pixel Values | 500 × 500 Pixel Values | 650 × 650 Pixel Values | 800 × 800 Pixel Values | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| PSNR | MSE | Time | PSNR | MSE | Time | PSNR | MSE | Time | PSNR | MSE | Time |
| 18.4565 | 927.7439 | 1.9871 | 18.8762 | 842.2853 | 3.2992 | 19.1958 | 782.5286 | 5.3546 | 19.4015 | 746.3251 | 8.9414 |
| 18.6146 | 894.5757 | 1.7530 | 18.7574 | 865.6460 | 3.0897 | 19.0214 | 814.5855 | 5.5177 | 19.1294 | 794.5858 | 8.4978 |
| 18.3691 | 946.6053 | 1.7672 | 18.9131 | 835.1674 | 3.2591 | 19.1162 | 797.0074 | 5.3404 | 19.3628 | 753.0119 | 8.3268 |
| 18.7747 | 862.2063 | 1.6509 | 18.6830 | 880.5934 | 3.1428 | 19.0212 | 814.6351 | 5.4728 | 19.3334 | 758.1162 | 8.3945 |
| 18.5523 | 907.5075 | 1.6583 | 18.7680 | 863.5269 | 3.1527 | 19.1821 | 784.9930 | 5.8004 | 19.2737 | 768.6233 | 8.8009 |
| 18.5249 | 913.2449 | 1.7565 | 18.9101 | 835.7386 | 3.1413 | 19.1222 | 795.9122 | 5.2623 | 19.2195 | 778.2766 | 9.1070 |
| 18.4711 | 924.6457 | 1.8162 | 18.9665 | 824.9626 | 3.0769 | 19.1388 | 792.8615 | 5.3666 | 19.1329 | 793.9458 | 8.9904 |
| 18.5027 | 917.9382 | 1.7327 | 18.8543 | 846.5476 | 3.2085 | 19.0365 | 811.7637 | 5.2851 | 19.2444 | 773.8263 | 9.3969 |
| 18.5617 | 905.5508 | 1.6634 | 18.6145 | 894.5940 | 3.1701 | 19.1874 | 784.0488 | 6.3562 | 19.0907 | 801.6980 | 9.0372 |
| 18.4884 | 920.9654 | 1.7663 | 18.5506 | 907.8610 | 3.2574 | 18.9774 | 822.8859 | 5.5557 | 19.3284 | 759.0033 | 8.7040 |
| PSNR Mean: 18.5316 MSE Mean: 912.0984 | PSNR Mean: 18.7894 MSE Mean: 859.6923 | PSNR Mean: 19.0999 MSE Mean: 800.1222 | PSNR Mean: 19.2517 MSE Mean: 772.7412 | ||||||||
| 350 × 350 Pixel Values | 500 × 500 Pixel Values | 650 × 650 Pixel Values | 800 × 800 Pixel Values | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| PSNR | MSE | Time | PSNR | MSE | Time | PSNR | MSE | Time | PSNR | MSE | Time |
| 18.5342 | 911.3028 | 2.5342 | 18.5828 | 901.1544 | 5.5202 | 18.6002 | 897.5575 | 12.2352 | 18.6504 | 887.2426 | 25.3709 |
| 18.5119 | 915.9863 | 2.3974 | 18.5438 | 909.2880 | 5.2957 | 18.7124 | 874.6603 | 12.7123 | 18.7940 | 858.3842 | 24.2956 |
| 18.4565 | 927.7495 | 2.4619 | 18.5660 | 904.6536 | 5.3261 | 18.7070 | 875.7537 | 11.9305 | 18.6203 | 893.4049 | 25.9419 |
| 18.4604 | 926.9053 | 2.3857 | 18.5033 | 917.7947 | 5.3010 | 18.6821 | 880.7937 | 11.6473 | 18.7787 | 861.4088 | 24.9687 |
| 18.4557 | 927.9302 | 2.4236 | 18.5870 | 900.2903 | 5.2821 | 18.8511 | 847.1601 | 11.7459 | 18.6419 | 888.9819 | 25.1073 |
| 18.5121 | 915.9399 | 2.4229 | 18.4860 | 921.4620 | 5.4175 | 18.6688 | 883.4962 | 11.5865 | 18.7756 | 862.0250 | 25.7629 |
| 18.6042 | 896.7213 | 2.4183 | 18.4826 | 922.1833 | 5.3205 | 18.6093 | 895.6809 | 11.4574 | 18.7594 | 865.2522 | 28.2525 |
| 18.4933 | 919.9185 | 2.4489 | 18.5674 | 904.3666 | 5.2700 | 18.5587 | 906.1624 | 11.5960 | 18.5693 | 903.9659 | 25.3977 |
| 18.3236 | 956.5777 | 2.4210 | 18.5627 | 905.3299 | 5.3125 | 18.6640 | 884.4572 | 11.6323 | 18.6851 | 880.1824 | 24.9104 |
| 18.2944 | 963.0243 | 2.7278 | 18.5136 | 915.6401 | 5.5594 | 18.6246 | 892.5204 | 12.0085 | 18.7903 | 859.1182 | 22.8444 |
| PSNR Mean: 18.4646 MSE Mean: 926.2056 | PSNR Mean: 18.5395 MSE Mean: 910.2163 | PSNR Mean: 18.6680 MSE Mean: 883.8242 | PSNR Mean: 18.7063 MSE Mean: 875.9966 | ||||||||
| CoSaMP | GBP | IHT | IRLS | SP | TL-GOMP | |
|---|---|---|---|---|---|---|
| PSNR (dB) | 16.8484 | 19.2067 | 15.2984 | 20.1498 | 18.0819 | 21.1882 |
| MSE | 1343.5 | 780.5690 | 1919.8 | 628.2036 | 1011.3 | 494.6024 |
| Running time (s) | 8.2561 | 15.1944 | 0.9567 | 10.8665 | 6.9127 | 2.5031 |
| CoSaMP | GBP | IHT | IRLS | SP | TL-GOMP | |
|---|---|---|---|---|---|---|
| PSNR (dB) | 17.1099 | 19.7444 | 15.3828 | 21.0134 | 18.2516 | 21.8560 |
| MSE | 1265 | 689.6748 | 1882.8 | 514.9214 | 972.5734 | 424.1134 |
| Running time (s) | 20.4365 | 60.4386 | 2.5600 | 64.1737 | 16.4263 | 5.6994 |
| CoSaMP | GBP | IHT | IRLS | SP | TL-GOMP | |
|---|---|---|---|---|---|---|
| PSNR (dB) | 17.3410 | 20.1147 | 15.3888 | 21.2962 | 18.6761 | 21.8993 |
| MSE | 1199.4 | 633.3042 | 1880.2 | 482.4597 | 881.9959 | 419.9057 |
| Running time (s) | 47.6477 | 151.2679 | 5.5886 | 260.7229 | 34.7940 | 11.5920 |
| CoSaMP | GBP | IHT | IRLS | SP | TL-GOMP | |
|---|---|---|---|---|---|---|
| PSNR (dB) | 17.4872 | 20.4032 | 15.5785 | 21.4114 | 18.7344 | 21.4954 |
| MSE | 1159.7 | 592.5921 | 1799.8 | 469.8253 | 870.2398 | 460.8311 |
| Running time (s) | 96.3305 | 308.2801 | 10.4591 | 650.7766 | 66.1669 | 23.6628 |
| 350 × 350 Pixel Values | 500 × 500 Pixel Values | 650 × 650 Pixel Values | 800 × 800 Pixel Values | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| PSNR | MSE | Time | PSNR | MSE | Time | PSNR | MSE | Time | PSNR | MSE | Time |
| 16.8092 | 1355.7 | 8.8949 | 16.9569 | 1310.4 | 21.0424 | 17.4505 | 1169.6 | 53.1953 | 17.4279 | 1175.7 | 104.1132 |
| 16.4940 | 1457.7 | 8.5638 | 17.1272 | 1260 | 20.5154 | 17.3648 | 1192.9 | 51.8239 | 17.5628 | 1139.7 | 100.1575 |
| 16.4971 | 1456.7 | 8.6117 | 17.0410 | 1285.2 | 20.8961 | 17.4114 | 1180.2 | 47.8983 | 17.4618 | 1166.6 | 99.2829 |
| 16.8151 | 1353.8 | 8.6880 | 17.0706 | 1276.5 | 20.2516 | 17.3835 | 1187.8 | 48.2978 | 17.6096 | 1127.5 | 102.0728 |
| 16.7148 | 1385.5 | 8.6742 | 17.1166 | 1263 | 20.0926 | 17.4745 | 1163.1 | 46.9857 | 17.4945 | 1157.8 | 102.7467 |
| 16.5159 | 1450.4 | 8.2333 | 16.9466 | 1313.5 | 20.1809 | 17.3226 | 1204.5 | 48.5044 | 17.6168 | 1125.6 | 106.1725 |
| 16.7907 | 1361.5 | 8.0242 | 17.1552 | 1251.9 | 20.0922 | 17.1436 | 1255.2 | 47.4073 | 17.5932 | 1131.8 | 103.6256 |
| 16.6924 | 1392.7 | 8.1107 | 17.1143 | 1263.7 | 20.1702 | 17.3318 | 1202 | 47.1307 | 17.5843 | 1134.1 | 102.4037 |
| 16.6452 | 1407.9 | 8.0281 | 16.9100 | 1324.6 | 20.1803 | 17.3889 | 1186.3 | 46.7126 | 17.6081 | 1127.9 | 102.3405 |
| 16.8484 | 1343.5 | 8.2561 | 17.1099 | 1265 | 20.4365 | 17.3410 | 1199.4 | 47.6477 | 17.4872 | 1159.7 | 96.3305 |
| PSNR Mean: 16.6823 MSE Mean: 1396.54 | PSNR Mean: 17.0548 MSE Mean: 1281.38 | PSNR Mean: 17.3613 MSE Mean: 1194.1 | PSNR Mean: 17.5446 MSE Mean: 1144.64 | ||||||||
| 350 × 350 Pixel Values | 500 × 500 Pixel Values | 650 × 650 Pixel Values | 800 × 800 Pixel Values | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| PSNR | MSE | Time | PSNR | MSE | Time | PSNR | MSE | Time | PSNR | MSE | Time |
| 19.4978 | 729.9666 | 16.7171 | 19.9097 | 663.9063 | 60.8671 | 20.2651 | 611.7477 | 152.6819 | 20.4798 | 582.2355 | 313.1546 |
| 19.1973 | 782.2584 | 15.4194 | 19.8177 | 678.1193 | 58.8448 | 20.2567 | 612.9301 | 151.4318 | 20.4731 | 583.1371 | 307.3742 |
| 19.4500 | 738.0428 | 15.7188 | 19.9173 | 662.7476 | 60.3878 | 20.0630 | 640.8796 | 152.0517 | 20.3483 | 600.1356 | 306.4753 |
| 19.3991 | 746.7401 | 15.4124 | 19.8520 | 672.7897 | 60.0065 | 20.1227 | 632.1369 | 152.8503 | 20.4549 | 585.5920 | 315.1839 |
| 19.3752 | 750.8673 | 15.4889 | 19.7395 | 690.4477 | 59.8597 | 20.2543 | 613.2665 | 151.6609 | 20.4367 | 588.0450 | 307.7829 |
| 19.2693 | 769.3932 | 15.3593 | 19.9330 | 660.3565 | 62.0048 | 20.3432 | 600.8463 | 151.6051 | 20.4022 | 592.7377 | 311.2913 |
| 19.4267 | 742.0074 | 15.5287 | 19.7074 | 695.5632 | 60.5518 | 20.2234 | 617.6454 | 150.1376 | 20.5054 | 578.8216 | 306.9459 |
| 19.3039 | 763.2860 | 15.4373 | 19.7071 | 695.6140 | 60.3061 | 20.2587 | 612.6538 | 150.4258 | 20.3715 | 596.9458 | 308.9359 |
| 19.4260 | 742.1325 | 15.4490 | 19.8390 | 674.8012 | 60.0366 | 20.2990 | 606.9950 | 149.5369 | 20.4816 | 581.9978 | 308.8351 |
| 19.2067 | 780.5690 | 15.1944 | 19.7444 | 689.6748 | 60.4386 | 20.1147 | 633.3042 | 151.2679 | 20.4032 | 592.5921 | 308.2801 |
| PSNR Mean: 19.3552 MSE Mean: 754.5263 | PSNR Mean: 19.8167 MSE Mean: 678.4020 | PSNR Mean: 20.2201 MSE Mean: 618.2406 | PSNR Mean: 20.4357 MSE Mean: 588.2240 | ||||||||
| 350 × 350 Pixel Values | 500 × 500 Pixel Values | 650 × 650 Pixel Values | 800 × 800 Pixel Values | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| PSNR | MSE | Time | PSNR | MSE | Time | PSNR | MSE | Time | PSNR | MSE | Time |
| 15.3230 | 1908.9 | 1.0292 | 15.5289 | 1820.5 | 2.7308 | 15.5357 | 1817.6 | 5.8068 | 15.1495 | 1986.7 | 10.6558 |
| 15.2696 | 1932.5 | 0.9657 | 15.3572 | 1893.9 | 2.5608 | 15.5149 | 1826.4 | 5.7885 | 15.6001 | 1790.9 | 10.7756 |
| 15.4349 | 1860.3 | 0.9223 | 15.3438 | 1899.8 | 2.5887 | 15.3108 | 1914.3 | 5.5971 | 15.4884 | 1837.6 | 10.4584 |
| 15.6466 | 1771.8 | 0.9237 | 15.5348 | 1818 | 2.5473 | 15.2720 | 1931.4 | 5.6787 | 15.3543 | 1895.2 | 10.7111 |
| 15.6298 | 1778.7 | 0.9336 | 15.3886 | 1880.3 | 2.5745 | 15.3944 | 1877.8 | 5.5852 | 15.1589 | 1982.4 | 10.4426 |
| 15.4950 | 1834.7 | 0.9343 | 15.6286 | 1779.2 | 2.5784 | 15.4219 | 1865.9 | 5.6056 | 15.2874 | 1924.6 | 10.5495 |
| 15.3671 | 1889.6 | 0.9265 | 15.3710 | 1887.9 | 2.5645 | 15.4774 | 1842.2 | 5.6063 | 15.4666 | 1846.8 | 10.5276 |
| 15.4187 | 1867.3 | 0.9262 | 15.3187 | 1910.8 | 2.5596 | 15.2540 | 1939.5 | 5.6121 | 15.4023 | 1874.4 | 10.4417 |
| 15.6738 | 1760.8 | 0.9315 | 15.6133 | 1785.5 | 2.5755 | 15.3534 | 1895.6 | 5.5838 | 15.4003 | 1875.2 | 10.4518 |
| 15.2984 | 1919.8 | 0.9567 | 15.3828 | 1882.8 | 2.5600 | 15.3888 | 1880.2 | 5.5886 | 15.5785 | 1799.8 | 10.4591 |
| PSNR Mean: 15.4557 MSE Mean: 1852.44 | PSNR Mean: 15.4468 MSE Mean: 1855.87 | PSNR Mean: 15.3923 MSE Mean: 1879.09 | PSNR Mean: 15.3886 MSE Mean: 1881.36 | ||||||||
| 350 × 350 Pixel Values | 500 × 500 Pixel Values | 650 × 650 Pixel Values | 800 × 800 Pixel Values | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| PSNR | MSE | Time | PSNR | MSE | Time | PSNR | MSE | Time | PSNR | MSE | Time |
| 20.6086 | 565.2282 | 11.7302 | 21.2215 | 490.8249 | 65.6006 | 21.3258 | 479.1809 | 270.9207 | 21.3758 | 473.7010 | 664.0105 |
| 20.6022 | 566.0515 | 10.5527 | 21.0093 | 515.4109 | 74.9643 | 21.4131 | 469.6444 | 262.2276 | 21.5207 | 458.1548 | 693.0186 |
| 20.6176 | 564.0528 | 11.4481 | 20.8764 | 531.4202 | 66.3486 | 21.4715 | 463.3728 | 260.0932 | 21.3714 | 474.1812 | 668.7674 |
| 20.4171 | 590.7103 | 10.6213 | 21.0181 | 514.3672 | 64.8940 | 21.6391 | 445.8292 | 261.3721 | 21.5438 | 455.7273 | 662.6378 |
| 20.7530 | 546.7416 | 11.0238 | 21.2248 | 490.4610 | 65.6442 | 21.2211 | 490.8747 | 258.2043 | 21.6174 | 448.0666 | 666.4153 |
| 21.0103 | 515.2937 | 11.2650 | 20.8733 | 531.7981 | 64.7945 | 21.2544 | 487.1234 | 261.8442 | 21.5099 | 459.2951 | 668.0591 |
| 21.1637 | 497.4021 | 11.4127 | 20.9998 | 516.5319 | 64.5561 | 21.2597 | 486.5327 | 255.4833 | 21.3478 | 476.7588 | 677.1501 |
| 20.4757 | 582.7821 | 10.9141 | 21.1686 | 496.8444 | 64.5493 | 21.2293 | 489.9456 | 255.1096 | 21.3538 | 476.1018 | 666.8833 |
| 20.6876 | 555.0313 | 10.6173 | 21.1205 | 502.3765 | 64.5562 | 21.3770 | 473.5656 | 264.4215 | 21.3173 | 480.1209 | 663.1420 |
| 20.1498 | 628.2036 | 10.8665 | 21.0134 | 514.9214 | 64.1737 | 21.2962 | 482.4597 | 260.7229 | 21.4114 | 469.8253 | 650.7766 |
| PSNR Mean: 18.6069 MSE Mean: 561.1497 | PSNR Mean: 21.0526 MSE Mean: 510.4957 | PSNR Mean: 21.3487 MSE Mean: 476.8529 | PSNR Mean: 21.4369 MSE Mean: 467.1933 | ||||||||
| 350 × 350 Pixel Values | 500 × 500 Pixel Values | 650 × 650 Pixel Values | 800 × 800 Pixel Values | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| PSNR | MSE | Time | PSNR | MSE | Time | PSNR | MSE | Time | PSNR | MSE | Time |
| 17.9046 | 1053.5 | 7.1466 | 18.4409 | 931.0924 | 17.3122 | 18.5753 | 902.7211 | 36.5388 | 18.8447 | 848.4259 | 70.6439 |
| 17.8879 | 1057.5 | 6.9380 | 18.1981 | 984.6217 | 16.6595 | 18.6085 | 895.8334 | 35.2757 | 18.8404 | 849.2576 | 68.9989 |
| 17.8405 | 1069.1 | 7.0076 | 18.1930 | 985.7762 | 16.7420 | 18.5203 | 914.2157 | 36.1913 | 18.8246 | 852.3637 | 74.357 |
| 17.8168 | 1075 | 6.8259 | 18.1758 | 989.6957 | 16.6609 | 18.4910 | 920.4035 | 34.9478 | 18.5796 | 901.8120 | 70.4628 |
| 17.7943 | 1080.6 | 6.7711 | 18.2247 | 978.6191 | 16.6698 | 18.5779 | 902.1786 | 35.1908 | 18.7513 | 866.8650 | 74.8542 |
| 17.7769 | 1084.9 | 6.739 | 18.2543 | 971.9713 | 16.7688 | 18.7444 | 868.2313 | 35.4837 | 18.7457 | 867.9828 | 70.8790 |
| 17.7737 | 1085.7 | 6.6753 | 18.3440 | 952.0871 | 17.0695 | 18.2689 | 968.6950 | 35.2054 | 18.7504 | 867.0365 | 71.0472 |
| 18.0686 | 1014.4 | 6.8211 | 18.1780 | 989.1917 | 17.3466 | 18.7020 | 876.7578 | 35.1299 | 18.7856 | 860.0449 | 69.8509 |
| 17.8676 | 1062.5 | 6.8499 | 18.2797 | 966.3036 | 16.6775 | 18.5849 | 900.7179 | 35.1921 | 18.7113 | 874.8790 | 71.3209 |
| 18.0819 | 1011.3 | 6.9127 | 18.2516 | 972.5734 | 16.4263 | 18.6761 | 881.9959 | 34.7940 | 18.7344 | 870.2398 | 66.1669 |
| PSNR Mean: 17.8813 MSE Mean: 1059.45 | PSNR Mean: 18.2540 MSE Mean: 972.1932 | PSNR Mean: 18.5800 MSE Mean: 903.1750 | PSNR Mean: 18.7568 MSE Mean: 865.8907 | ||||||||
| Times of Signal Reconstruction | 1 | 50 | 100 | 200 |
|---|---|---|---|---|
| Value of residual | 168.5664 | 161.6117 | 150.3473 | 136.5506 |
| Residual Values | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 1 time | 168.5664 | 168.6020 | 162.6642 | 165.0314 | 169.6857 | 165.8414 | 158.1089 | 155.4569 | 155.4202 | 149.4011 |
| 50 times | 161.6117 | 159.0616 | 160.1910 | 155.4877 | 155.4719 | 150.6663 | 142.2037 | 149.5014 | 148.7272 | 155.5769 |
| 100 times | 150.3473 | 150.5078 | 150.1486 | 147.8456 | 148.4673 | 153.6050 | 153.2938 | 147.4182 | 155.6388 | 149.4355 |
| 200 times | 136.5506 | 143.0227 | 139.9187 | 143.3128 | 146.7156 | 147.7237 | 146.9315 | 141.7615 | 144.6260 | 143.4051 |
| d (m) | 75 | 125 | 175 | 225 |
|---|---|---|---|---|
| PSNR (dB) | 13.5770 | 10.4228 | 11.2921 | 12.2664 |
| MSE | 2.8525 × 103 | 5.8992 × 103 | 4.8292 × 103 | 3.8587 × 103 |
| 9 | 10 | 11 | 12 | 13 | |
|---|---|---|---|---|---|
| PSNR | 24.4658 | 25.9451 | 26.2747 | 26.4402 | 26.5216 |
| MSE | 232.5423 | 165.4131 | 153.3254 | 147.5921 | 144.8496 |
| 85 | 64 | 51 | 42 | 36 | |
|---|---|---|---|---|---|
| PSNR | 24.5055 | 23.9166 | 23.3133 | 22.6527 | 21.3493 |
| MSE | 230.4277 | 263.8865 | 303.2150 | 353.0308 | 476.5985 |
| k = 9 | PSNR | 24.4658 | 24.4578 | 24.5642 | 24.6083 | 24.5429 | 24.3835 | 24.4639 | 24.4566 | 24.5734 | 24.5788 |
| MSE | 232.5423 | 232.9702 | 227.3323 | 225.0338 | 228.4496 | 236.9926 | 232.6450 | 233.0364 | 226.8511 | 226.5680 | |
| k = 10 | PSNR | 25.9451 | 25.9281 | 25.9644 | 25.9163 | 26.1031 | 26.0670 | 26.1165 | 25.9435 | 26.2481 | 25.9240 |
| MSE | 165.4131 | 166.0630 | 164.6806 | 166.5131 | 159.5034 | 160.8350 | 159.0111 | 165.4743 | 154.2653 | 166.2188 | |
| k = 11 | PSNR | 26.2747 | 26.2508 | 26.3373 | 26.1912 | 26.3492 | 26.2861 | 26.2062 | 26.2744 | 26.2622 | 26.1795 |
| MSE | 153.3254 | 154.1708 | 151.1292 | 156.3016 | 150.7153 | 152.9223 | 155.7619 | 153.3364 | 153.7671 | 156.7223 | |
| k = 12 | PSNR | 26.4402 | 26.4753 | 26.3413 | 26.2574 | 26.5338 | 26.4707 | 26.3457 | 26.4020 | 26.3657 | 26.5155 |
| MSE | 147.5921 | 146.4039 | 150.9896 | 153.9345 | 144.4438 | 146.5585 | 150.8391 | 148.8964 | 150.1456 | 145.0545 | |
| k = 13 | PSNR | 26.5216 | 26.4978 | 26.5798 | 26.6370 | 26.6094 | 26.4142 | 26.6716 | 26.4771 | 26.4774 | 26.6881 |
| MSE | 144.8496 | 145.6461 | 142.9226 | 141.0527 | 141.9519 | 148.4760 | 139.9344 | 146.3412 | 146.3327 | 139.4024 |
| M = 85 | PSNR | 24.5055 | 24.6425 | 24.5528 | 24.5056 | 24.5522 | 24.5659 | 24.5421 | 24.5434 | 24.4919 | 24.4003 |
| MSE | 230.4277 | 223.2689 | 227.9270 | 230.4216 | 227.9595 | 227.2443 | 228.4929 | 228.4230 | 231.1488 | 236.0733 | |
| M = 64 | PSNR | 23.9166 | 24.1006 | 23.9725 | 24.0803 | 24.1310 | 24.0046 | 24.0576 | 24.1294 | 23.9754 | 24.0435 |
| MSE | 263.8865 | 252.9398 | 260.5121 | 254.1288 | 251.1774 | 258.5935 | 255.4592 | 251.2689 | 260.3421 | 256.2885 | |
| M = 51 | PSNR | 23.3133 | 23.5388 | 23.5970 | 23.4893 | 23.4474 | 23.2988 | 23.2958 | 23.3413 | 23.4279 | 23.3476 |
| MSE | 303.2150 | 287.8705 | 284.0408 | 291.1752 | 293.9946 | 304.2291 | 304.4373 | 301.2679 | 295.3188 | 300.8316 | |
| M = 42 | PSNR | 22.6527 | 22.7587 | 23.1023 | 22.7050 | 22.5485 | 22.8871 | 23.2799 | 22.9354 | 22.9467 | 22.6748 |
| MSE | 353.0308 | 344.5174 | 318.3073 | 348.8021 | 361.6032 | 334.4826 | 305.5548 | 330.7809 | 329.9219 | 351.2371 | |
| M = 36 | PSNR | 21.3493 | 21.9878 | 21.9421 | 21.8499 | 22.1946 | 21.9828 | 21.8089 | 21.8007 | 22.1391 | 21.0789 |
| MSE | 476.5985 | 411.4304 | 415.7896 | 424.7125 | 392.2991 | 411.9064 | 428.7317 | 429.5465 | 397.3452 | 507.2072 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yong, J.; Li, K.; Feng, Z.; Wu, Z.; Ye, S.; Song, B.; Wei, R.; Cao, C. Research on Photon-Integrated Interferometric Remote Sensing Image Reconstruction Based on Compressed Sensing. Remote Sens. 2023, 15, 2478. https://doi.org/10.3390/rs15092478
Yong J, Li K, Feng Z, Wu Z, Ye S, Song B, Wei R, Cao C. Research on Photon-Integrated Interferometric Remote Sensing Image Reconstruction Based on Compressed Sensing. Remote Sensing. 2023; 15(9):2478. https://doi.org/10.3390/rs15092478
Chicago/Turabian StyleYong, Jiawei, Kexin Li, Zhejun Feng, Zengyan Wu, Shubing Ye, Baoming Song, Runxi Wei, and Changqing Cao. 2023. "Research on Photon-Integrated Interferometric Remote Sensing Image Reconstruction Based on Compressed Sensing" Remote Sensing 15, no. 9: 2478. https://doi.org/10.3390/rs15092478
APA StyleYong, J., Li, K., Feng, Z., Wu, Z., Ye, S., Song, B., Wei, R., & Cao, C. (2023). Research on Photon-Integrated Interferometric Remote Sensing Image Reconstruction Based on Compressed Sensing. Remote Sensing, 15(9), 2478. https://doi.org/10.3390/rs15092478