1. Introduction
Electromagnetic waves can be used efficiently for the analysis of materials using backscattered signals. Nowadays, systems that transmit and receive signals are commonly used as radars, which are used widely in remote sensing, subsurface analysis [
1], automotives, and health care [
2]. Radar signals can be generated using pulses in the time domain or continuous waves, and radar systems can be divided into time-domain and frequency domain radars [
3]. The pulse based radar transmits very narrow pulses in the time domain [
4]. Meanwhile, frequency domain radars use different signals in the frequency, and extract the phase and amplitude differences between the transmitted and received signals. Typical frequency domain radars are Frequency Modulated Continuous Wave (FMCW) radar [
5] and the Stepped Frequency Continuous Wave (SFCW) radar [
6]. Those radars are very interesting, because they do not require high speed analog-to-digital converters (ADC) at the receiver site, because the received signal is demodulated into an Intermediate Frequency (IF) signal. It is well known that those radars have good sensitivity properties compared to time domain radars [
7,
8]. The SFWC radar can, nowadays, be found in automotive radar applications [
9,
10,
11].
The frequency bandwidth and the spatial frequency resolution are two important parameters of the Ground Penetrating Radar (GPR) systems. Penetration depth of electro-magnetic waves depends on the frequency depended absorption in the soil. Using frequencies of transmitted signals below 100 MHz enables us to penetrate at least 10 m below the ground surface. Radio frequencies between 200–800 MHz are used to reach depths up to 4 m, and higher radio frequencies between 800–3000 MHz are used in applications that explore the subsurface up to 1 m. With lower frequencies, the resolution will be limited because of the higher wavelengths; therefore, a compromise between penetration depth and resolution is needed. Borehole radars operate in transmission mode, and can perform cross-hole measurements between two boreholes. Tomography analysis can be applied to the cross-hole measurements to estimate anomalies between two cross-holes. Electromagnetic attenuation in the soil limits the distance between boreholes [
12].
Many different approaches in radar design have been proposed over recent decades. The frequency-domain radars demodulate the amplitude and phase from the received data, which are represented within the frequency domain, and converted into a time domain using the inverse discrete Fourier transform (IDFT). The SFCW radar generates the data by sweeping over the frequency band using a predefined number of steps. The frequency hopping over a larger bandwidth requires some time, therefore, this is the main drawback of SFCW radars applied to the ground penetrating radar applications [
13,
14,
15,
16,
17]. The advantage of such designed system is a high sensitivity and a larger bandwidth. In recent years, through the wall imagining has become very attractive [
18,
19,
20,
21]. A second very important parameter is antenna coupling. In most of the GPR applications, the antenna is placed very close to the surface, causing that the echo from the ground surface can saturate the received signal, thus allowing the application of appropriate automatic gain control or echo suppression methods. The pulse based radars are implemented efficiently using ultra wide band principles for pulse generation. The design of pulse-based radars is based on avalanche transistors [
22], tunneling diodes [
23], nonlinear transmission lines [
24], and step recovery diodes [
25].
The GPR is a common tool for detecting subsurface object and subsurface analysis. The overview of methods for soil moisture detection using GPR with a single antenna pair and common midpoint survey using a multiple antenna system is analyzed deeply in [
26]. Once the radar signals, i.e., A-scans, are generated and detected, the received signals are organized into B-scans. Those signals are time dependent signals acquired in the time series. The signals within the B-scan are pre-processed using mean subtraction and gain correction. The changes and object detection can be detected using principal component analysis [
27], individual component analysis [
28], and object detection methods based on convolutional neural networks (CNN) [
29]. In the literature, many different algorithms can be found for object detection using CNN. The CNN algorithm is a subset of deep neural networks and deep learning paradigms [
30] and has proven its effectiveness for object detection in images, speech recognition, the futures extraction algorithm, etc. The novel research confirms that CNN has advantages in series forecasting [
31].
In this paper, we designed a pulse generator based on a system proposed in [
32,
33], where a generator is based on triggering MOSFET transistors and reverse bias diodes. The designed generator was able to generate a nanosecond pulse with 1 kV amplitude [
32]. In this paper, we propose to analyze data using a 3-dimensional (3D) regression CNN. The experimental results showed that the 3D regression CNN using data fed with time domain signals is not as accurate as 3D regression CNN, which is fed with pre-processed data using the transformation of 1-dimensional (1D) data series into a 2-dimensional (2D) image using short-time Fourier transform (STFT). The experimental results showed that the changes in the soil moisture can be detected using the proposed system and a 3D convolutional regression network.
This paper presents research study of automatic water leaking detection system over a large distance (15 km) within the canals that supplies water to hydro-power station. The particular canal is made of layers of soil with a thin concrete layer. Lined water canals are used as aqueducts, delivering water for consumption, agricultural irrigation, or water supply for hydroelectric power stations. Lining of impervious materials on the bed of water canal is used to ensure maximum water retention. Leakages in the water canal’s lining can reduce available water and can impact the efficiency of water usage at the canal’s end point. The main goal is to ensure security and prevent canal collapsing. The soil moisture can be detected using optical fiber system, where a different refractive index of soil can be detected along the optical fiber [
34]. Cross-hole tomography uses a pair of antennas—one antenna is fixed in the same position, and one antenna is lowered and raised in the borehole. Tomography system produces a lot of data and has additional hardware setup requirements. In case of our application, i.e., automated remote monitoring of a concrete lined water canal on longer distances, the tomography setup proved to be impractical, because of the desired depth, and to expensive to implement. Therefore, a preliminary experiments presented in this paper were carried out with simplified hardware setup and CNN processing of the data. We proposed a system divided into different sections using boreholes and a proposed cross-hole radar system. A custom made radar design is used for feasibility study presented in this paper. Proposed solution proved to be efficient in mitigating the hardware limitations of proposed cross-hole system by utilizing advanced processing techniques based on deep learning. The proposed hardware system is less complex, produces less data, and is more affordable, thus making it more suitable for long range automated remote monitoring system.
2. Generator Design
The goal of designing a pulse generator is to generate pulses with high amplitude (above 1 kV) and short in time (a few ns). The principle of the generator [
33] is shown in
Figure 1.
The short pulse is generated using junction recovery diodes. The goal is to transfer the energy stored in inductor
to the resistive load. The circuit is designed so that the maximal energy is stored in
when the diode stops conducting. This can be achieved by using a sinusoidal current, which enables diode switching. The authors in [
32,
33] determined that the most energy that can be stored in
is
and
when the diodes stop conducting. The rise time of the pulse is determined by the switching speed of the diodes, which is fixed, but the fall time of the pulse is an exponential decay with an
time constant. The pulse generator was designed using a series of ten diodes to handle voltages above 2 kV and currents above 30 A.
Author in [
32] enhances the generator by adding a parallel MOSFET transistor mode to provide higher currents and voltages and achieving two times higher voltage feed to the LC oscillator. The configuration is shown in
Figure 2, where four MOSFET transistors were used and operated in parallel switching mode. The T1 and T3 transistors are triggered simultaneously, while T2 and T4 are switched off, and vice versa. By using two switching transistors at the same time, twice as much energy is provided at the output. The output voltage from the switching circuit is fed to the pulse generator.
The device was triggered by a special time based triggering circuit provided by a clock generator CDCM6208V1 from Texas Instruments, where
was set to 2.5 V and the supply voltage was 5 V. The input voltage of 1000 V was generated by voltage regulator UMR-AA-1000, from Dean Technologies. The Marx generator assured 1000 V in-voltage and providing a voltage pulse of 2115 V. The pulse, generated using the designed nanosecond pulse generator is shown in
Figure 3, and was acquired by setting input voltage
to 1000 V. The authors in [
32] reported the increase in the input voltage by a factor of 9 using a similar circuit. In this paper, achieved input voltage increase factor using antenna with 200 Ω of resistivity was 2. Therefore, the proposed nanosecond pulse generator was not utilized optimally. The generated pulse, shown in
Figure 3 has the time width of 2.14 ns at 2115 V.
3. Antenna Design
The goal was to transmit the RF pulse over a distance of 100 m under the ground using the antenna. A special design is needed, as the pulse transmissions require antennas with a large bandwidth [
35]. In this paper, we found the most appropriate antenna for this application antenna design proposed in [
36], because the antenna’s bandwidth was reported to be high enough to ensure propagation of electromagnetic waves over larger distances using antenna’s center frequency of 200 MHz. The geometry of the antenna is shown in
Figure 4.
The antenna is built from a conductive arm with a length of 910 mm and the loaded arm with length of 630 mm, as shown in
Figure 4. The conductive arm is a copper cylinder that acts as housing for the receiver and transmitter electronics. The loaded arm is a narrow strip, 6 mm in width and an implementation of a discrete resistive Wu-King impedance loading profile (at 25, 27, 125, 175, 225, 275, 325, 375, 425, 475, 525, and 575 mm, a resistance of 77.6, 83.1, 93.8, 103.1, 118.3, 136.2, 160.7, 196, 248.1, 348.8, 563.4, and 1918.6 Ω are inserted, respectively) [
37]. The borehole antennas are connected to the proposed nanosecond pulse generator and receiver using coaxial cables.
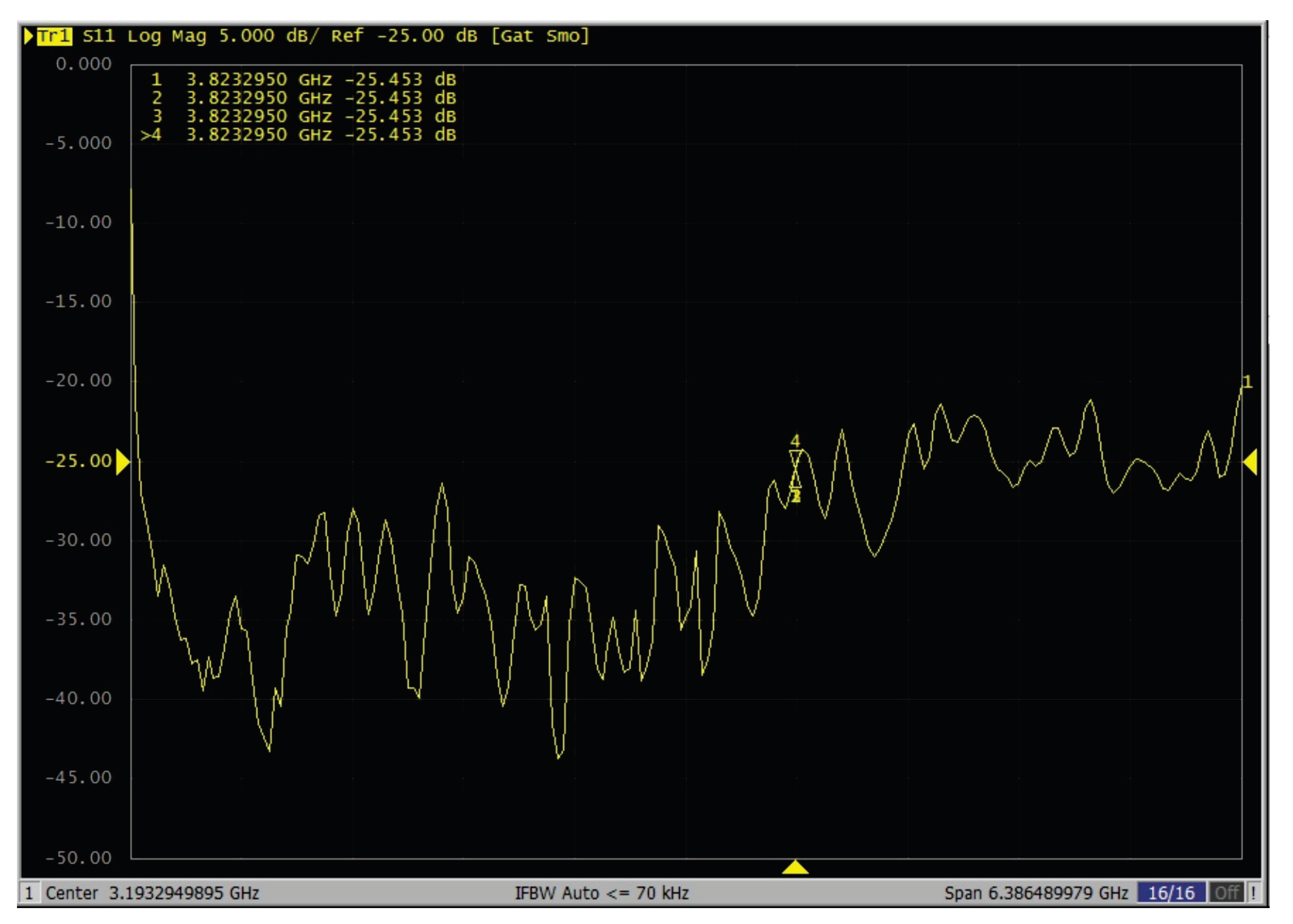
The
parameter of the fabricated antenna is shown in
Figure 5. The parameter
is defined as the reflection coefficient between the port impedance and the network’s input impedance, and it shows how much power is reflected back at the antenna port due to mismatch from the transmission line, and it measures the amount of energy returning to the analyzer. The amount of energy that returns to the analyzer is affected directly by how well the antenna is matched to the transmission line. A small
indicates a significant amount of energy has been delivered to the antenna. A good compromise is at −13 dB. If
is smaller than −13 dB, the impact from reflections will not be seen on the transmitted signal.
Figure 5 shows the measured
parameter where
parameter values are below −20 dB for frequency range between 100 kHz and 6.3 GHz.
4. System Overview and Operation
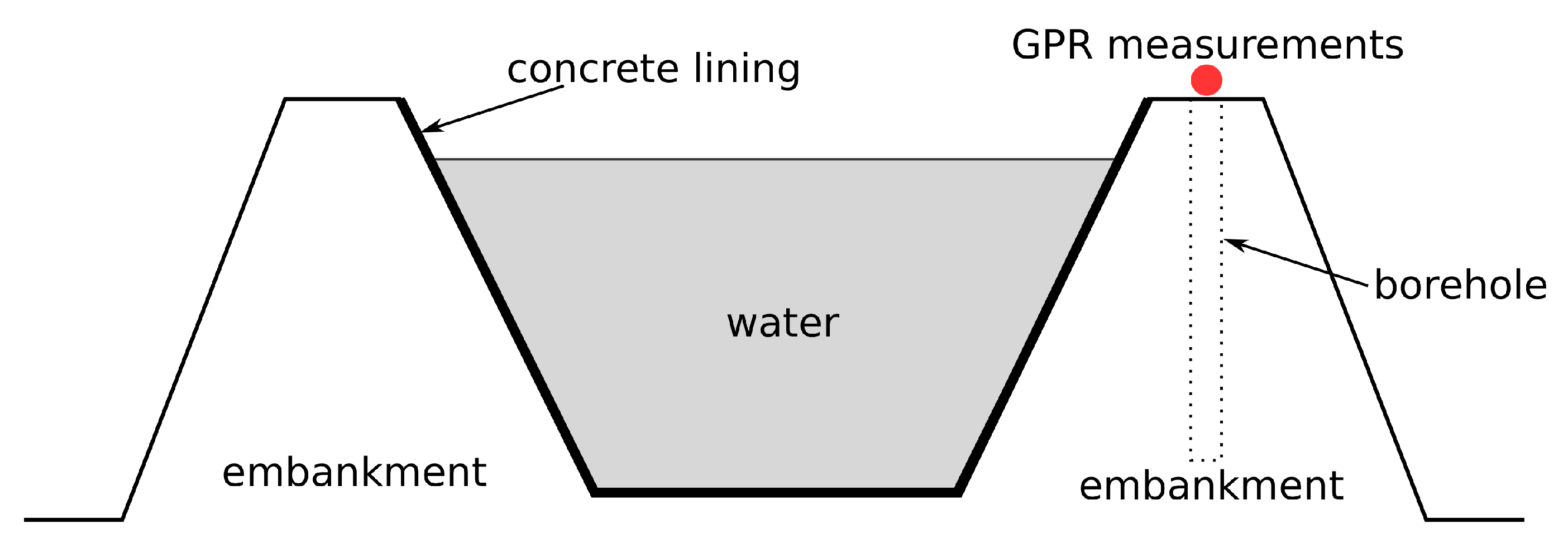
This paper aimed to detect changes in soil moisture over more considerable distances.
Figure 6 shows the water canal’s cross-section. The water canal is raised over the ground surface using an embankment of compacted soil. The inside of the water canal is lined with a layer of concrete to retain water. If there is a lining leak, the embankment’s soil moisture will change. Therefore, constant soil moisture monitoring in the embankment is performed since higher water content can cause soil erosion, and less water is distributed using a water canal. This paper proposes a cross-hole GPR system for autonomous monitoring over larger sections. The proposed system could reduce maintenance costs and could raise water distribution efficiency.
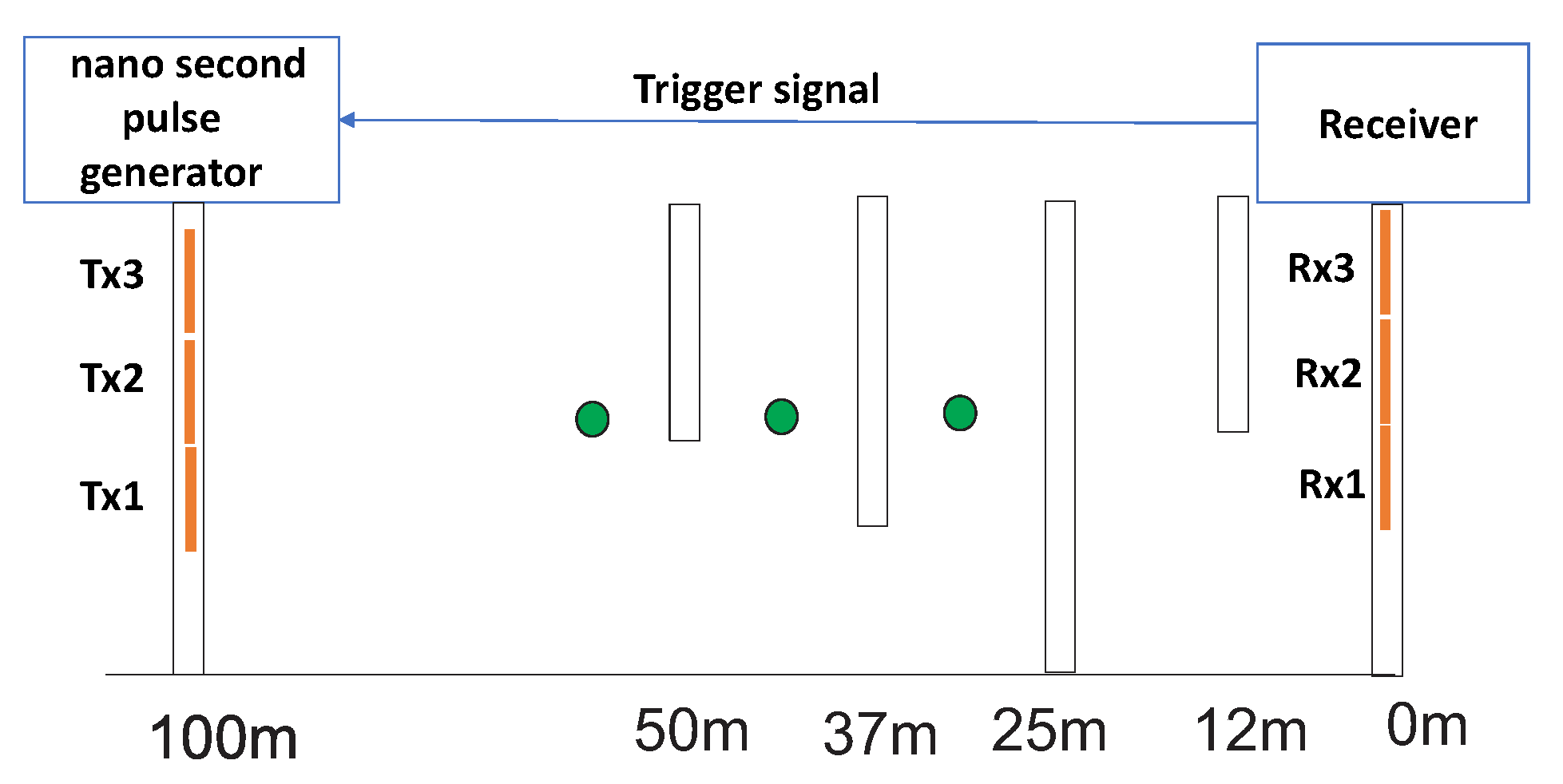
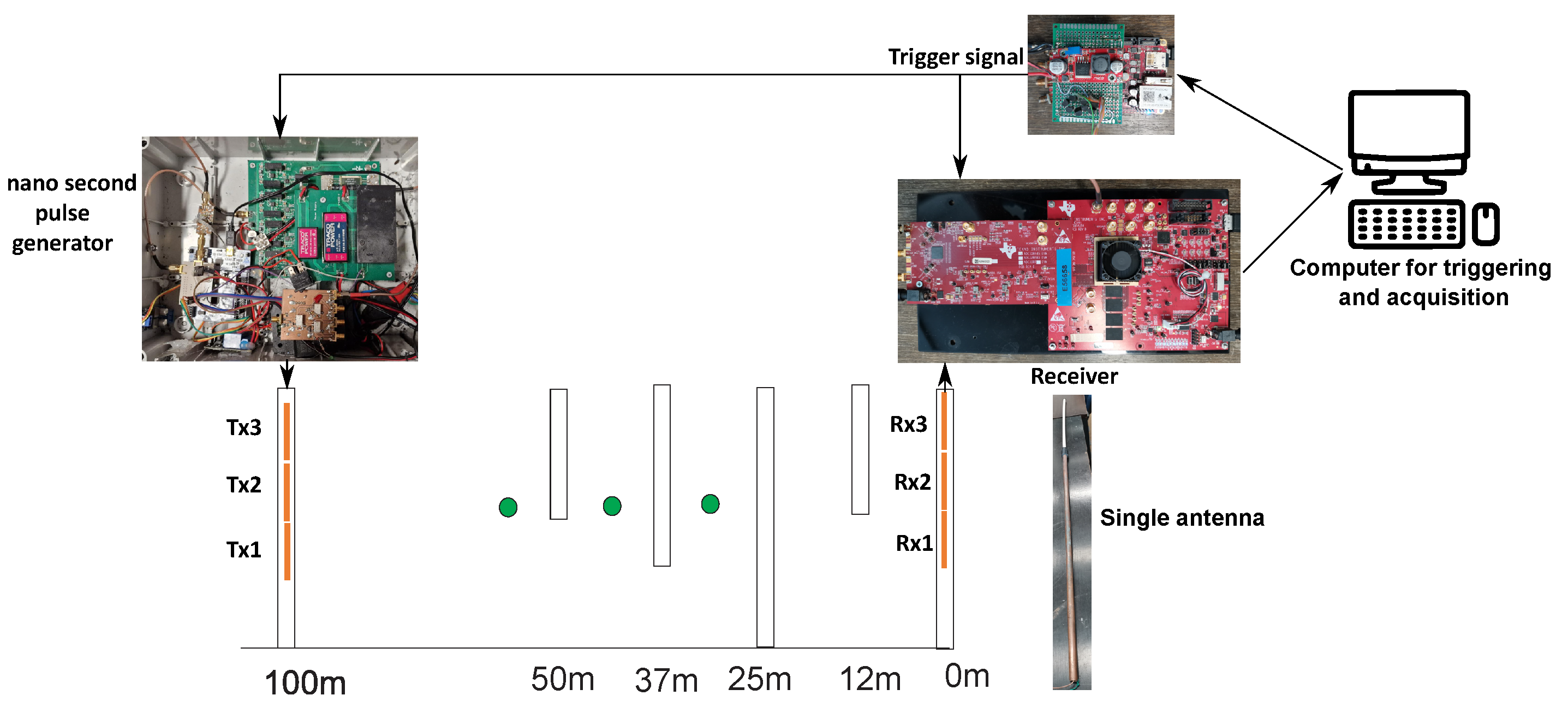
The system overview and the borehole placement at the test area are shown in
Figure 7. The transmitter (Tx) and receiver (Rx) of the designed system were placed on opposite sides of the observation area. The Tx unit transmits nanosecond pulses and the Rx unit is receiving them using a high-speed data acquisition card with a sampling rate of 3 Giga Samples per second. On the Rx side the timing unit was allocated that triggers the pulse generator at the Tx side and enables data acquisition. A series of pulses were transmitted using the pulse repetition frequency (PRF) of 1 kHz. Ten received pulses were averaged at the Rx side.
The boreholes for the Tx and Rx sides were 100 m apart, and additional boreholes were drilled at distances of 12.5, 25, 37.5, and 50 m from the Rx side. A total of six antennas were placed at different depths inside the Rx and Tx boreholes, and the system switched between three Tx and three Rx antennas, obtaining all 3 × 3 combinations. The antennas were designed to be 1.55 m in length, therefore, 3 antennas were placed inside the boreholes at depths of 2, 4, and 6 m. The soil moisture was measured by the soil moisture sensor buried at the depth of 2 m at three locations: 31, 43, and 56 m from the Rx borehole.
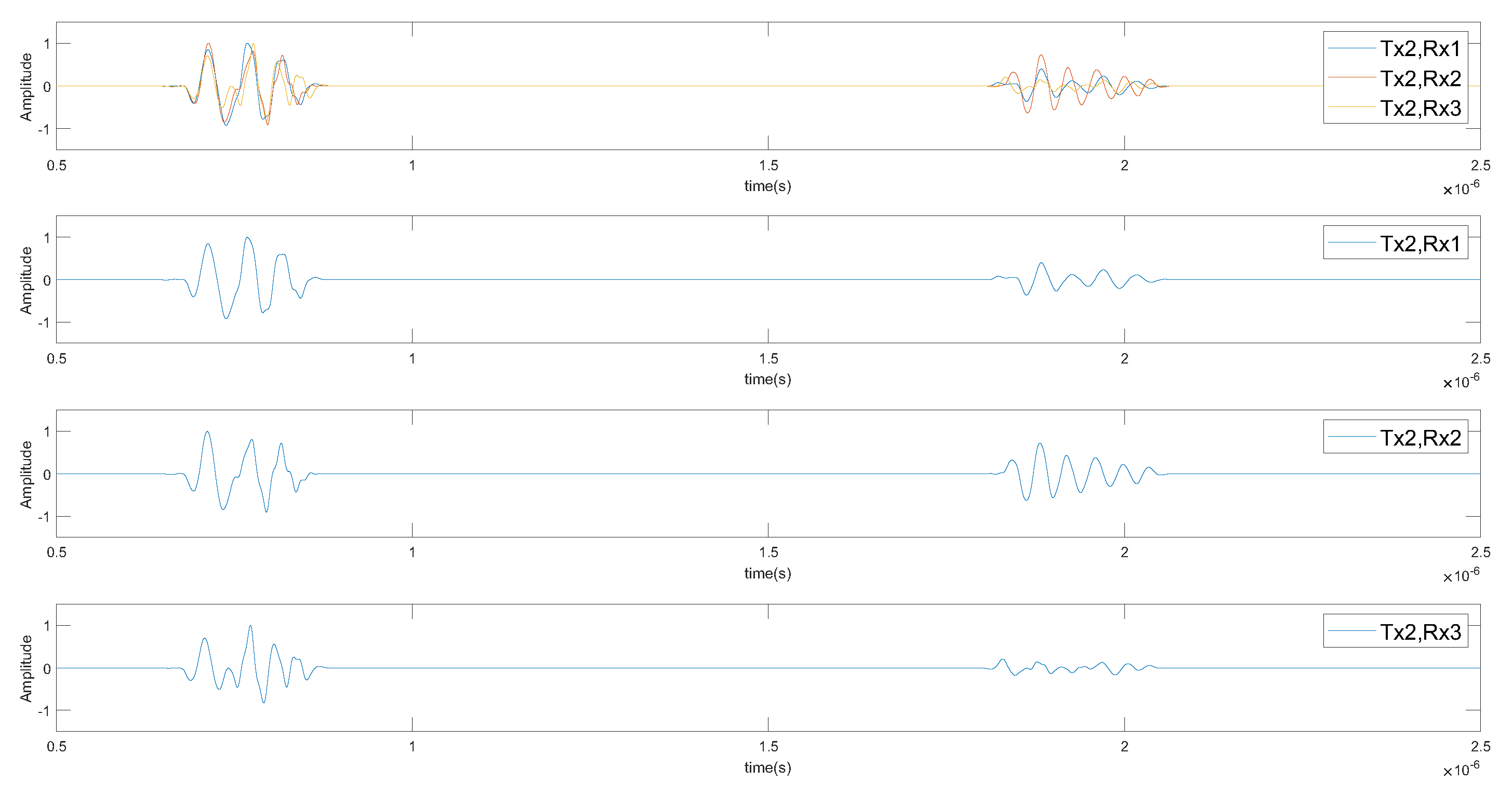
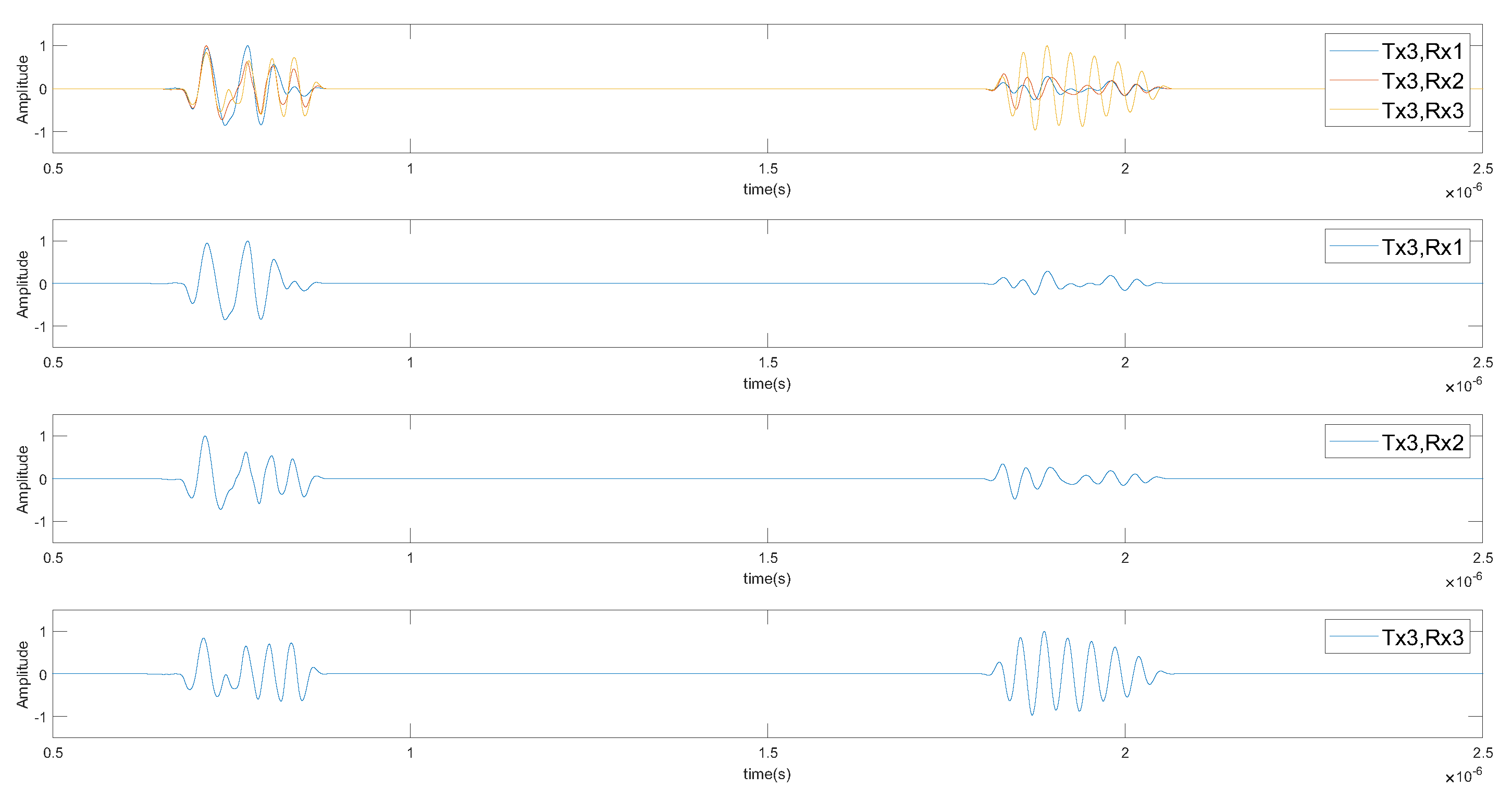
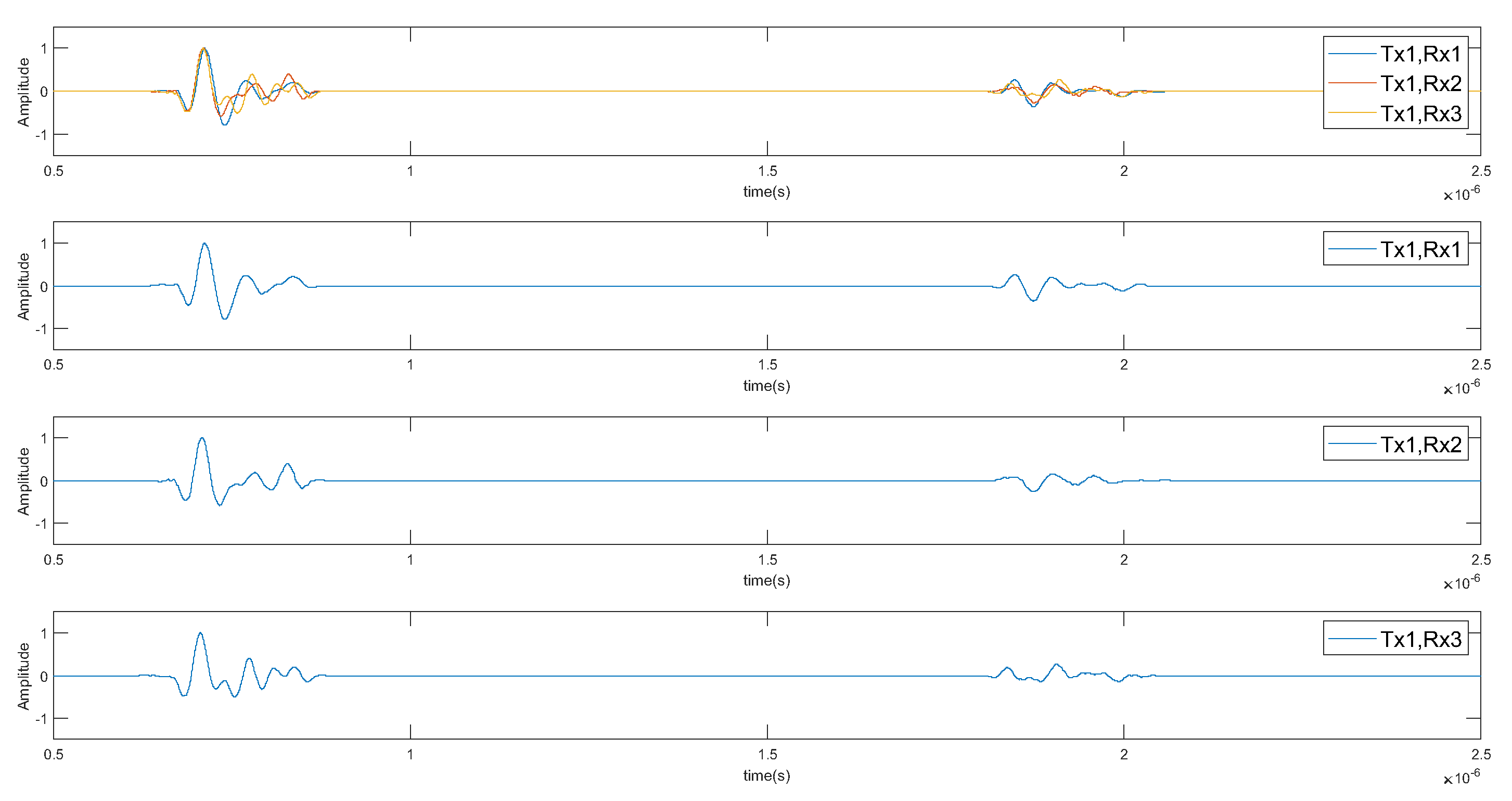
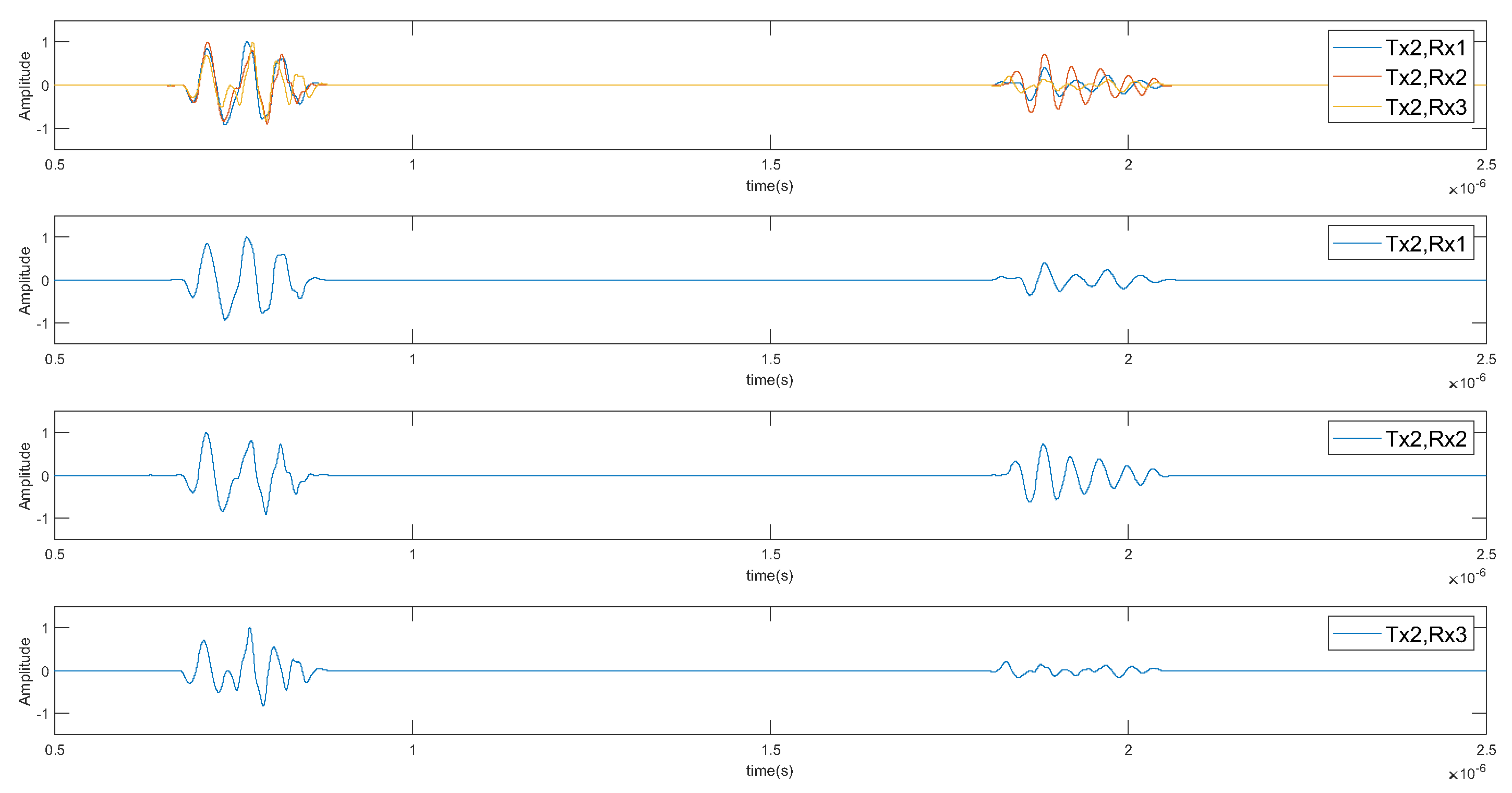
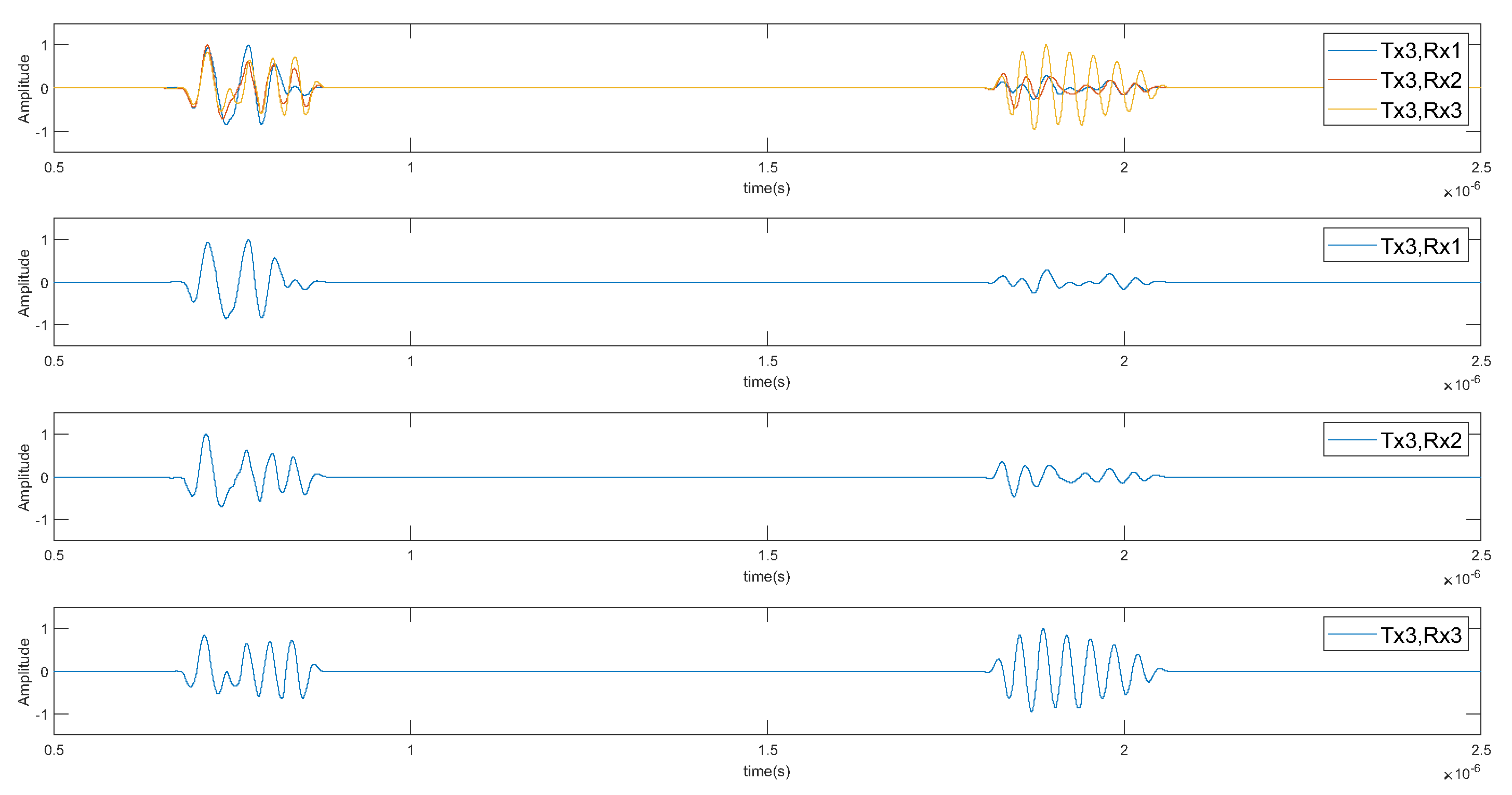
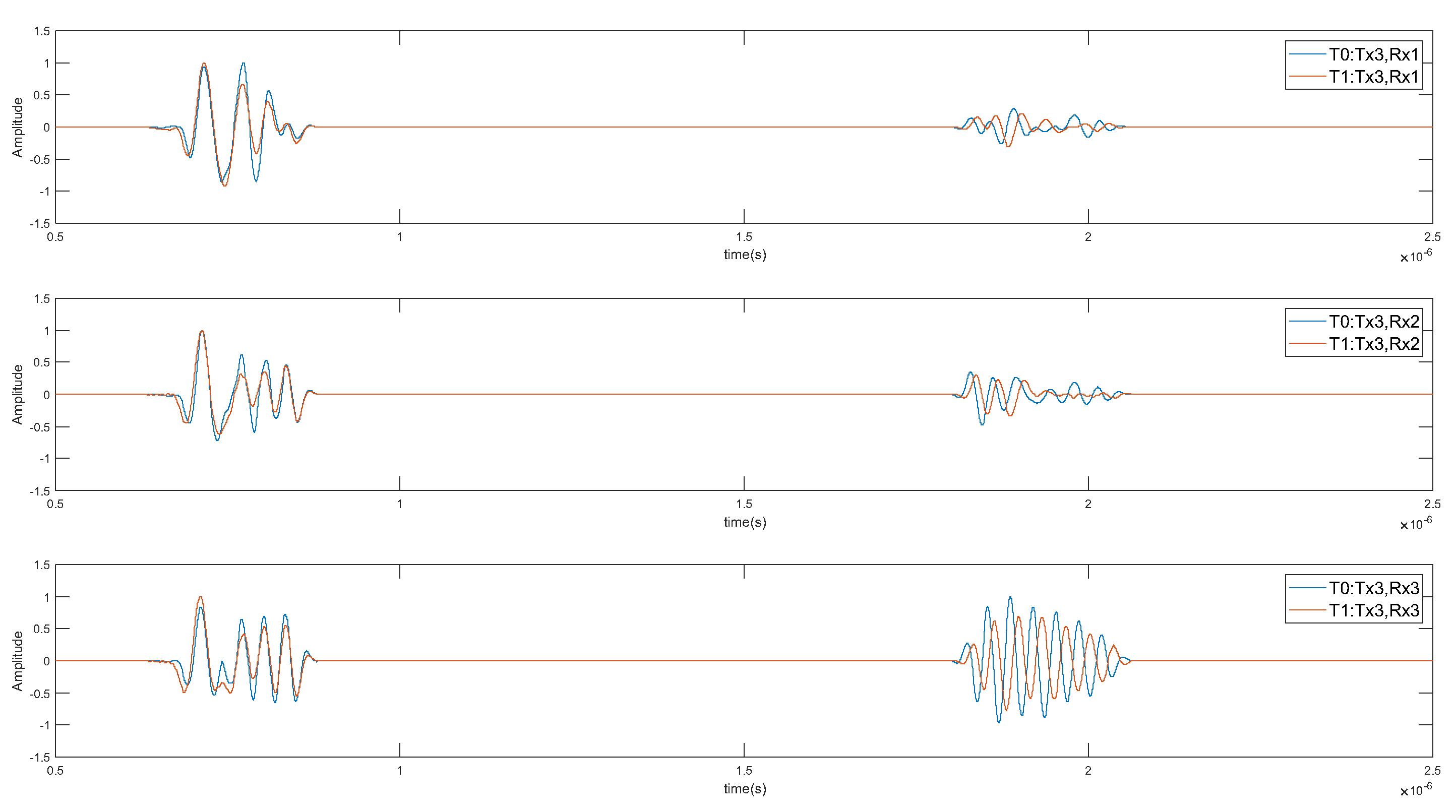
The signal’s time dependency for all three Rx antennas and all Tx antennas are shown in
Figure 8,
Figure 9 and
Figure 10. From
Figure 8, it can be seen that after the acquisition starts the transmitted signal can be detected on all the receiver’s antenna. The signal is delayed by the time trigger signal needs to travel 100 m from Rx side to Tx side over the coaxial cable (15 μs). The ground signal can be spotted at time 0.8 μs after triggering (signal propagates over the coaxial cable with a speed of
, where
c is the speed of EM wave in free space, resulting in 0.49 μs, and the ground signal propagates for additional 0.33 μs). It can be noticed that the designed antenna filters the input pulse from 2 ns to 57 ns at the receiver. This is due to the not optimally matched and balanced antenna resistance, which was approx. 200 Ω. The antenna was not designed and fabricated optimally. Nevertheless, the proposed system is used for soil moisture estimation and soil moisture change detection.
Figure 8,
Figure 9 and
Figure 10 show the signals received when Tx1–Tx3 are transmitting one-by-one and antennas Rx1–Rx3 are all receiving transmitted signals. The air-coupled signals have a constant delay.
Figure 8,
Figure 9 and
Figure 10 show the acquisition for dry soil condition.
The dielectric constant was estimated using the Topp model [
38] given in (2) and volumetric soil moisture was estimated with (2). Using the time delay of the received signal the dielectric constant was estimated to be 7.85 in dry conditions, resulting in 15% volumetric moisture and a propagation speed of
. Several experiments were made where 800 L of water were poured into a borehole installed at 50 m from the Rx borehole within 10 min.
Figure 11,
Figure 12 and
Figure 13 show time delayed signals before event and 1 h after the event. It is clearly visible that the received signals were additionally delayed due to the change in the soil moisture content. The measurements showed that the soil moisture in the upper layers changed from 15 to 19% of volumetric moisture.
The proposed system can cause safety concerns since the RF amplitudes are in the 1 kV range. Following the European Council recommendation on the limitation of exposure of the general public to electromagnetic fields (0 Hz to 300 GHz) 1999/519/EC, the reference levels for electric, magnetic, and electromagnetic fields should not exceed values presented in the first row of
Table 1. Electromagnetic field values were estimated to ensure the proposed cross-hole GPR system complies with the 1999/519/EC recommendations, as shown in the second row of
Table 1. The proposed system operates within 1999/519/EC limits for a frequency range of 10–400 MHz. Nevertheless, safety measures to protect the researchers and the environment were taken, such as limited exposure time, personal protection equipment, etc.
5. Regression Convolutional Neural Network
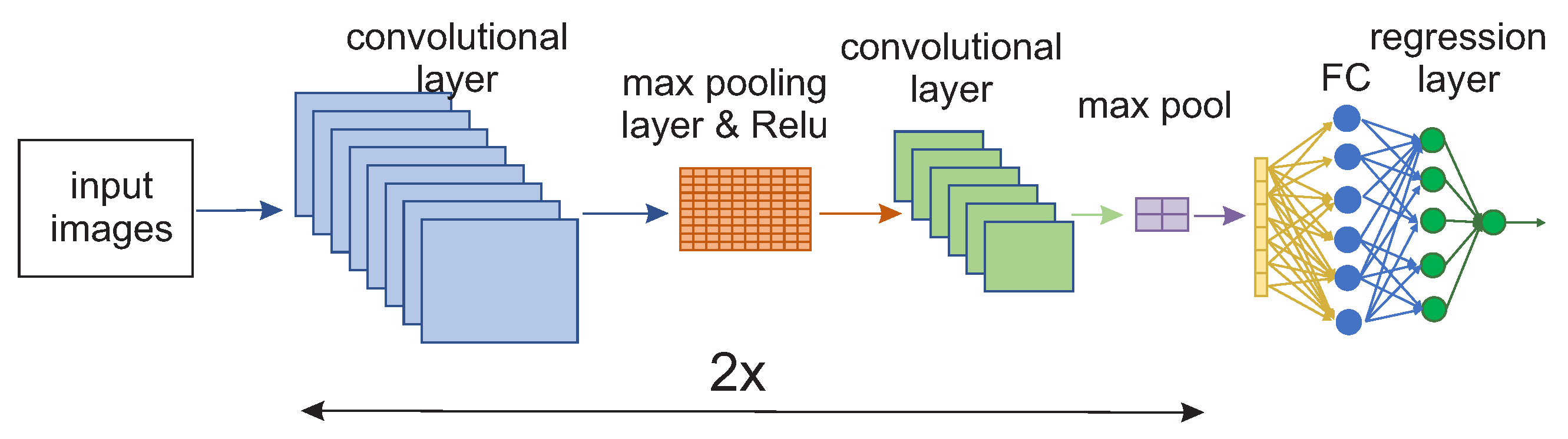
A CNN represent a series of filtering operations to extract features from the data and weight estimation, using regularization layers and closing a network with the fully connected layers. The STFT data are filtered by a series of 2D convolutional filters or kernels, and fed to a non-saturating activation function using the special rectified linear units (ReLU). The structure of proposed 2D regression CNN (2DCNN) is shown in
Figure 14. The structure of convolutional layer, max-pooling, ReLU, second convolutional layer, and max-pooling is repeated two times in a series in the proposed 2DCNN, and is followed by a fully connected layer and a regression layer. The 2D convolution extracts features using the local neighborhood. The feature evaluation is based on additive bias, and the result is estimated with the sigmoid function. Features compose the feature map, a 2D image containing the values of the extracted features. The value of extracted feature
at position
in the
j-th feature map in the
i-th layer can be estimated as
where
is the hyperbolic tangent function,
is the bias,
m represents indexes of the feature maps in the
-th layer connected to the current feature map,
is the value at the position
of the kernel connected to the
k-th feature map, and
and
are the dimensions of the kernel. The resolution of the feature maps is reduced by pooling over a local neighborhood on the feature maps, and provides invariance to the distortions. The trainable parameters of the CNN are the bias
and the kernel weights
. The supervised learning approach was used in this paper.
5.1. 3-Dimensional Convolutional Neural Networks
The idea of this paper is to extend a 2DCNN to a 3D regression CNN (3DCNN). The 2DCNN extracts 2D feature maps which represent features from the spatial dimensions only. A 3DCNN can enable both spatial and temporal feature extraction. The 3D convolution is represented by 3D convolutional filters or kernels. The feature maps in a 3D convolutional layer are interconnected over the temporal data inside the previous layer. This enables the extraction of temporal information. Equation (
3) represents a value in the feature map at position
for the 2DCNN, and can be expended into the value
at the position
on the
j-th feature map in the
i-th layer for the 3DCNN. The value
is estimated as
where
is the size of the 3D kernel along the temporal dimension,
is the
-th value of the kernel connected to the
m -th feature map in the previous layer. One drawback of the proposed 3DCNN is that the 3D convolutional filter can extract only one type of feature from the frame cube. This is due to the filter weights being replicated across the whole cube. This can be resolved similar to the 2D convolution. A general design principle of CNNs is that the number of feature maps should be increased in late layers by generating multiple types of features from the same set of lower-level feature maps. Therefore, by applying multiple 3D convolutions with distinct filter weights to the same location in the previous layer would enable multiple feature extraction.
5.2. Pre-Processing of Acquired Data Using STFT
Figure 15 and
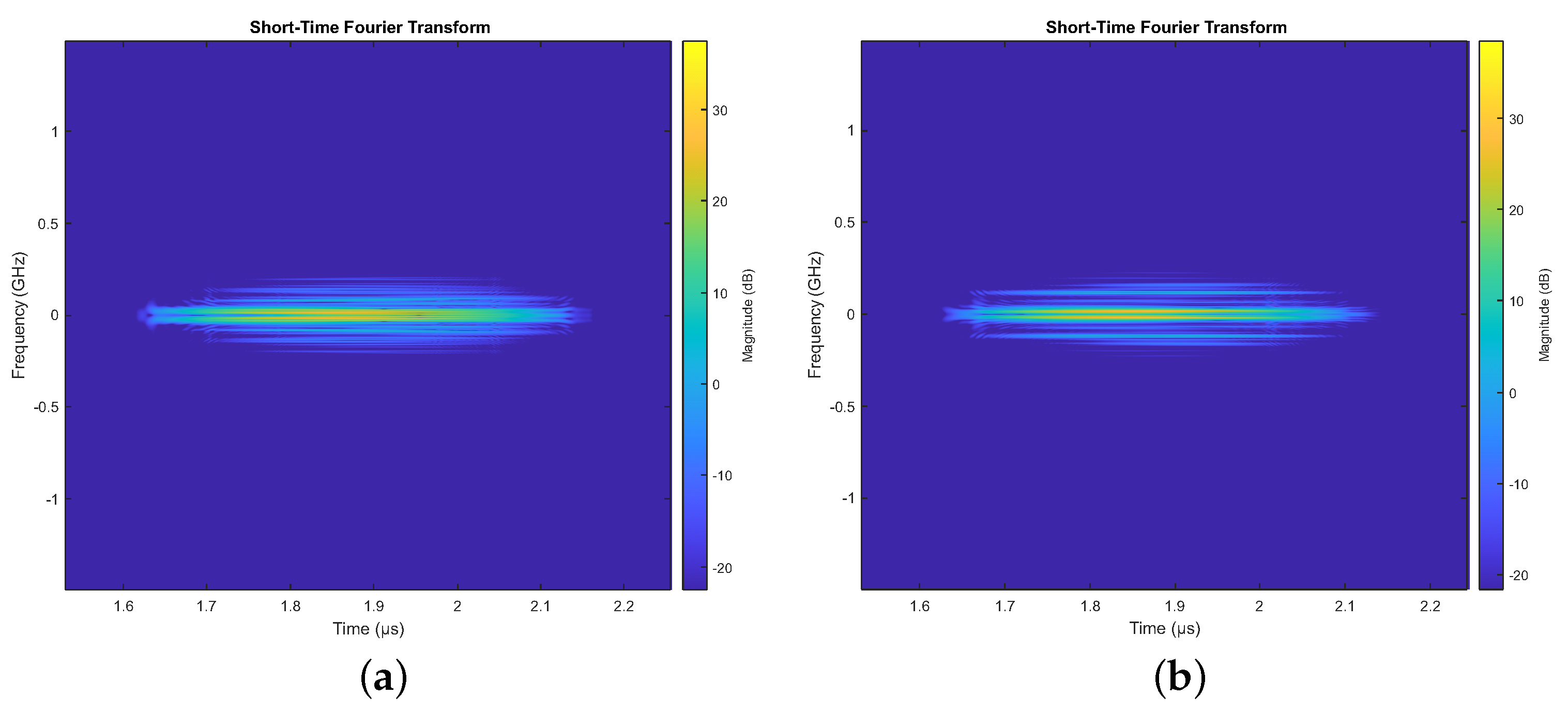
Figure 16 shows measurements and comparison in dry conditions. The received signal can be divided into an air-coupled signal and a ground-coupled signal. The air-coupled signal represents the first part of the signal that propagates through the air and partly over the ground. The air component is much higher in the amplitude than the ground component. Therefore, we decided to observe just the received signal that propagates over the ground. The 1D signal was sampled using the sample frequency of 3 GHz and the acquisition lasted for 4 μs. Using a 1D signal process (i.e., data series) using CNN, the 1D signal is transformed into a 2D signal or image using STFT. The STFT of the received signal is shown in
Figure 17a. The Hamming window of size 1024 samples and overlapping of 1023 samples was used to produce a 2D image 1024 × 1024 pixels in size. The STFT of the received signal on antenna Rx2 using transmitting antenna Tx2 in the dry condition and after 800 L of water were poured into borehole, is shown in
Figure 17b. After the event, higher frequencies within the STFT spectrogram were much more visible.
Figure 17a,b represent spectrograms of the received signal before and after the water was poured into the borehole. The change in frequency and its phase components are clearly evident. The complex values regression CNN is used to estimate soil moisture using the designed system.
6. Data Processing Using CNN
The soil moisture can be estimated by processing the data using analysis of time delayed signals. To perform a tomography, many antennas or moving antenna platform would be needed. The system was designed to monitor the soil moisture of the canal which supplies a hydro-power station, constantly between two boreholes and detect possible leaks. To process the data, we propose to use the CNNs to extract changes in the soil moisture automatically. Changes in the soil moisture can also be caused by longer rain periods. The acquired data were correlated with the rainy days’ data, and it was found that the estimated dielectric constant depends on an antenna’s position within the borehole. The proposed system has an additional feature, since the air-coupled signal was attenuated strongly on the rainy days.
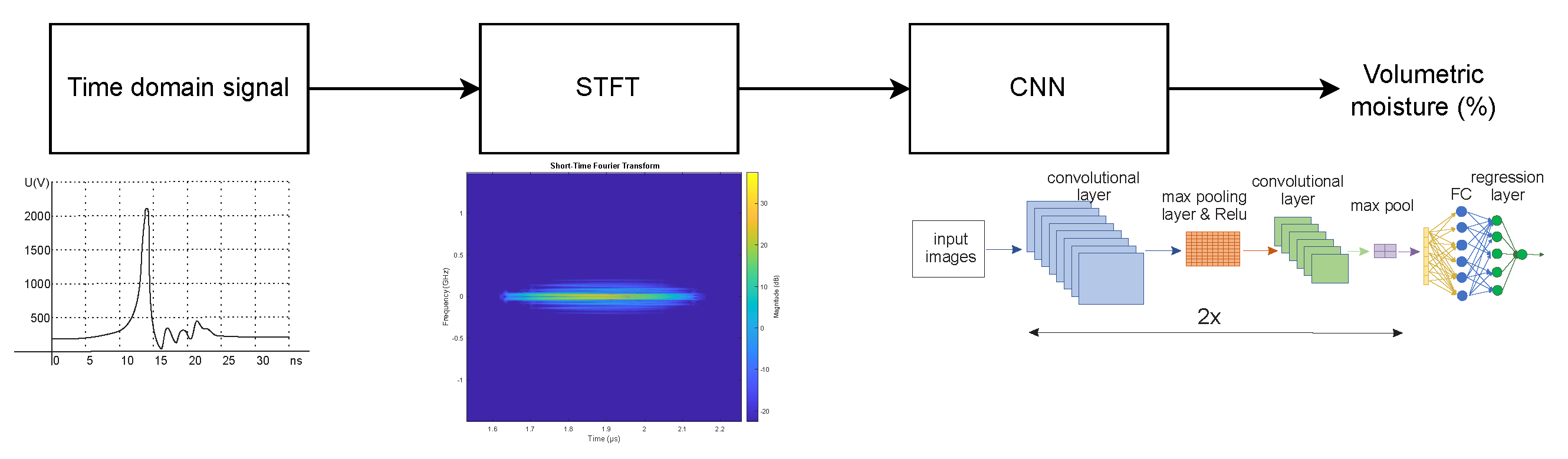
Figure 18 shows proposed data processing procedure. The radar signals are acquired with proposed cross-hole GPR system. The serialized data are then transformed into an image using STFT. To extract features from the acquired signals automatically, a CNN-based regression network was designed to process the 1D data series. In addition, a 3D regression CNN that can analyze data series and characterize the content of the soil moisture is proposed in this paper.
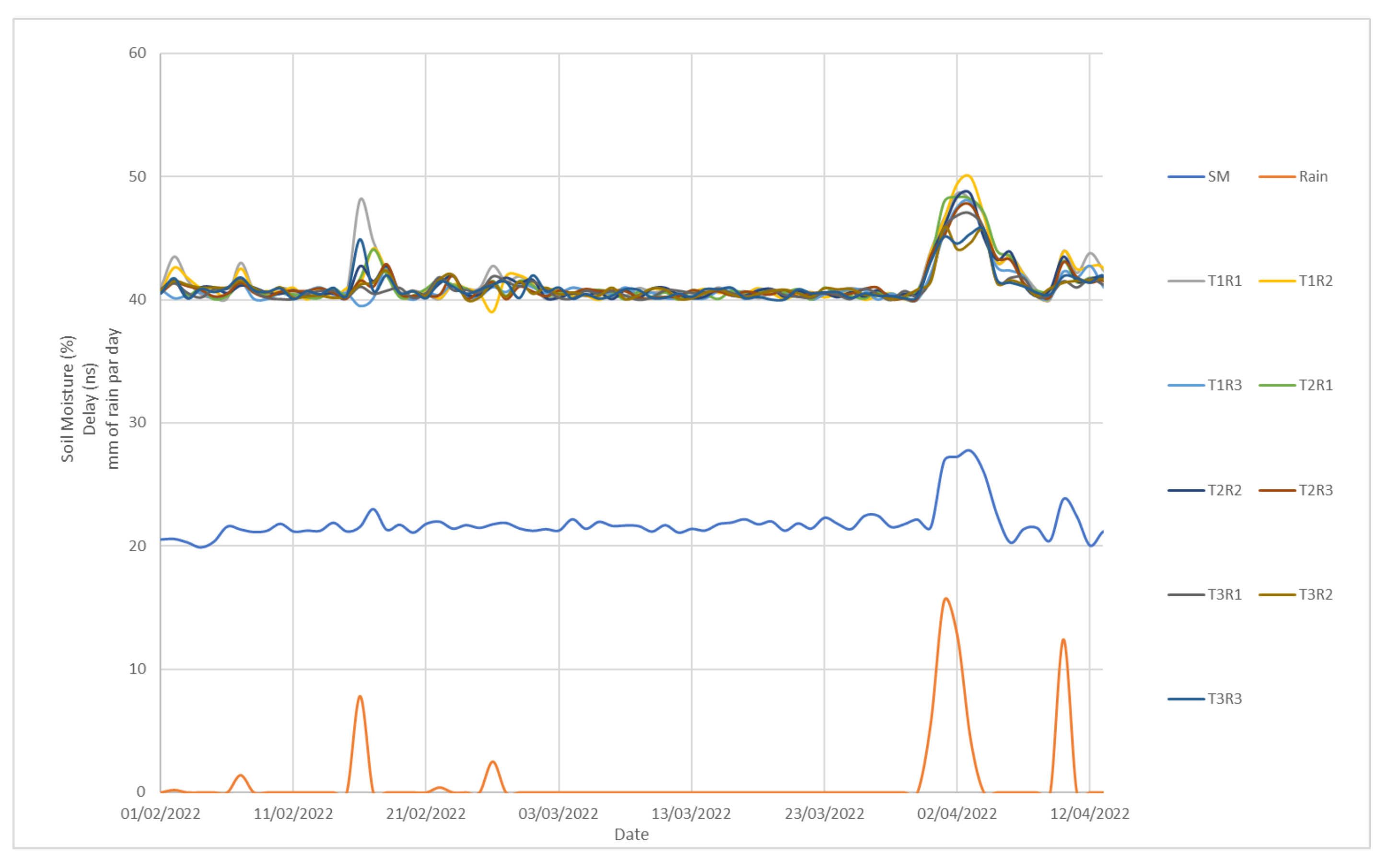
Figure 19 shows amount of rain in mm, average measurements of soil moisture using buried soil moisture sensors and delays between signals on Tx and Rx antennas in ns from 1 February till 15 April 2022. In that period, rain fell seven times and the amount of rain was between 0.5 mm to 12 mm per day. Soil moisture sensors buried below surface were capturing only 2 events on 1 April and 10 April. The delays between Tx and RX were randomly changing for all events, except the last 2. We decided to exclude data from continuous data acquisition and from training, validation, and testing when the amount of rain was below 12 mm per day.
All acquired data in the span of 73 days were used to test the proposed system and volumetric moisture. In addition, a second experiment was performed in which 800 L of water was poured in the specially prepared boreholes. Goal of the second experiment was to track changes in soil moisture in the case of a sudden injection of water. This was simulated by pouring the 800 L of water in specially prepared boreholes and measurements were taken every 15 min for next 6 h.
7. Experimental Results
The soil moisture extraction experiment is divided into several steps. The first step is data preparation, and the second step is a CNN configuration. The CNN is trained and validated in the last step. The training, validation, and testing data were acquired using a custom built database. Each data set consisted of an acquisition using 800 L of water poured into four different boreholes, located at different locations. The experiment was repeated four times, and Tx and Rx positions were swapped each time. The data were acquired every 30 min for 12 h after water injection, and the reference measurements were acquired using soil moisture sensors buried at the locations marked in
Figure 20. Each batch consisted of a hundred acquisitions of each measurement. Ten batches were used for CNN training, which covered a thousand samples for each measurement. The samples are divided equally into training, validation, and testing data sets.
The acquired data were firstly transformed using the STFT. The 3D convolution was applied, with a kernel size of . The 3D max-pooling operation was applied with dimensions of , followed by the batch normalization layer. The 3D convolutional layer was applied once again with the 3D max-pooling layer and batch normalization. The flatten, dense, and activation ReLU layers were applied, followed by the dense, ReLU activation, dense, and activation layers with a sigmoid function. The model was compiled with an Adam optimizer, a learning rate of and mean square error loss function. Too many layers in the network can cause overfitting. The overfitting prevents the network from processing non-learned samples accurately. The number of filters or kernels and kernel size and stride were determined experimentally.
The training and validation data parameters are reported in
Table 2.
Table 2 summarizes the measured relative soil moisture SM (%), and measured time delay between the transmitted signal and the groundcoupled signal at the Rx for all measurements. More than 20,000 measurements were made using the same distance between the Tx and Rx and different combinations. The measurements were sorted regarding the measured soil moisture, as shown in the first column of
Table 2. The reference soil moistures, shown in the last three columns of
Table 2, were measured at three different locations, as shown in
Figure 7. The reference measurements were averaged, and the average soil moisture was used as a target value in the supervised CNN learning. The reference soil moisture sensors were located 2 m below the surface, and the boreholes for water injection were 2–3 m in depth. The soil in the experiments was very dry at the beginning of the experiments, and the soil moisture was increased gradually by pouring several 1000 L of water into the boreholes to cover soil moisture between 15–45%, as shown in the first column of
Table 2.
Table 3 shows a comparison of different variations of the proposed method. Different network configurations are compared. The regression network (RN) depicted in
Figure 14 is compared to the method where the input data were pre-processed using STFT and trained with the RN, 3DCNN trained using the original data, 3DCNN trained using STFT pre-processed data. The results reported in
Table 3 show that all the presented methods can estimate soil moisture using the regression convolutional network. It is interesting that 1D data are not appropriate for a current configuration resulting in a mean square error (MSE) of 25, 3.4, 27.7, and 1.14, which shows clearly that the RN and 3DCNN methods cannot estimate the time delay using the regression approach. By converting 1D data to the 2D data the RN and 3DCNN methods can model the time delay efficiently, and thus predict the soil moisture. The 3DCNN method provided the best results in MSE measurements, followed by the RN method.
8. Conclusions
This paper presents automated soil moisture estimation using a custom-built system for cross borehole pulse transmission and soil moisture estimation using time domain data and 3DCNN. The novelty in this paper is the soil moisture extraction form real valued data using the proposed GPR system. The efficiency of CNN-based soil moisture extraction depends on the pre-processing technique; in this case, STFT, which is proven as a suitable approach for deep learning algorithms. The STFT provided higher accuracy, being more robust on measurement uncertainty and bias. The impact on the accuracy of soil moisture recognition was observed for regression-based estimation and regression-based estimation using a 3DCNN. The simple network can extract the soil moisture parameters efficiently, and the accuracy can be increased for when 1D data series is transformed using STFT into a 2D image. The advantage of the proposed system is efficient soil moisture estimation using a 3DCNN regression network, thus providing a simple data processing technique with high accuracy.
Preliminary research presented in this paper shows the ability to detect soil moisture changes over a large area. Further research should combine several proposed systems arranged in sections over the lined water canal’s full-length (several km). A network system of proposed cross-hole GPR systems could provide automated leak detection in lined water canals over large distances.


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}