
Methods of Analyzing the Error and Rectifying the Calibration of a Solar Tracking System for High-Precision Solar Tracking in Orbit

Abstract
1. Introduction
2. Materials and Methods
2.1. The Principle of Solar Tracking
2.2. Error Analysis and Rectifying the Deviation of the Solar Tracking System
2.2.1. Analysis of the Errors and Deviations of the Solar Tracking System
- The inherent errors and deviations of the solar tracking system include:
- (a)
- Error caused by software time delay.
- (1)
- The maximum main cycle period of the SECCS is 0.3 s, so the maximum of T1 is 0.3 s, and the maximum speed of the solar movement is 0.035°/s. Therefore, the maximum error generated by this time delay is 0.0105°.
- (2)
- The main cycle of CPU software of the turntable’s electrical cabinet is 1 ms, so the maximum of T2 is 1 ms, and the maximum error generated during this time is 0.000035° (negligible). It cannot be rectified but can be ignored.
- (b)
- Error caused by the SECCS calculation.This part of the error only involves that which is generated by the SECCS data processing. The chip of the solar irradiance spectrometer’s electrical cabinet’s CPU is a DSP, which can calculate 64-bit floating-point operations. Therefore, the CPU calculation error is 10−6 rad (negligible). It cannot be rectified but can be ignored.
- (c)
- Error and deviation caused by mechanical installation.This part of the error and deviation includes 4 items:
- (1)
- The installation deviation and measurement error between the turntable and the satellite’s mounting surface are in Table 1 (no. 4).
- (2)
- The installation deviation between the turntable’s mounting surface and the shaft system of the turntable and the measurement error are in Table 1 (no. 5).
- (3)
- The installation deviation and measurement error of the guide mirror’s optical axis and the shaft system of the turntable are in Table 1 (no. 6).
- (4)
- The installation deviation and measurement error of the guide mirror’s optical axis and vis channel optical axis are in Table 1 (no. 7).
- (d)
- Error caused by the turntable’s tracking control.The maximum error of the control turntable is 0.01°, and the error cannot be rectified.
- (e)
- The error in data provided by the satellite.
- (1)
- The solar vector error of the orbital coordinate system error is 0.009°.
- (2)
- The error caused by the update time of the solar vector and satellite attitude is 40″.
- (3)
- The cycle time of the orbit message sent to the spectrometer by the satellite is 2 s, and the maximum speed of the solar movement is 0.035°/s. Therefore, the maximum error generated by this cycle time is 0.07°.
- (f)
- The satellite sends its attitude angle in a broadcast message to the spectrometer, and the attitude angle is 0.006° (3σ) in Table 1 (no. 9).
- 2.
- The unpredictable deviations of the solar tracking system include:
- (a)
- The solar tracking simulation experiment on the ground is not sufficient, resulting in incorrect symbols of the angle values.
- (b)
- The solar tracking simulation experiment on the ground is not sufficient, resulting in an inaccurate angle calculation.
- (c)
- During satellite launch, new deviations occur between the mechanical structures due to vibration.
2.2.2. Rectification Method for the Deviation of the Solar Tracking System
3. Results of High-Precision Solar Tracking in Orbit
4. Discussion
- The rotation range of the turntable azimuth direction changes in orbit;
- The SECCS calculates the sunlight angle with Formula (4); ψx, φx, and θx are 0° in orbit;
- The mode switches in orbit are the same as the simulation on the ground;
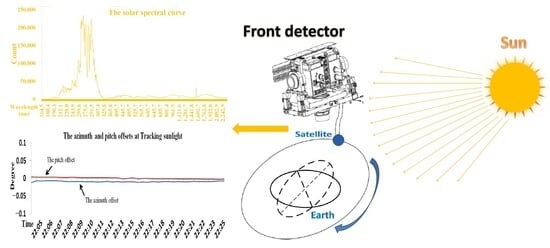
- The sunlight tracking accuracy meets the requirements of remote sensing instruments, and the solar spectral detection results are stable in orbit.
5. Conclusions
6. Patents
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ingrid, M.; Libor, N.; Jakub, V.; Tarjei, A.; Ashild, F.; Karine, I.; David, M.; Nicole, M.V.; Jiri, P.; Zoltan, S.; et al. Dust obserbations with antenna measurements and its prospects for observations with Parker Solar Probe and Solar Orbiter. Ann. Geophys. 2019, 37, 1121–1140. [Google Scholar]
- Dimitris, K.; Jesus, P. Editorial for the Special Issue Solar Radiantion, Modeling, and Remote Sensing. Remote Sens. 2019, 11, 1198. [Google Scholar]
- Chen, B.; Ding, G.X.; He, L.P. Solar X-ray and Extreme Ultraviolet Imager (X-EUVI) loaded onto China’s Fengyun-3E Satellite. Light Sci. Appl. 2022, 11, 29. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.-X.; Chen, B.; He, F.; Song, K.-F.; He, L.-P.; Liu, S.-J.; Guo, Q.-F.; Li, J.-W.; Wang, X.-D.; Zhang, H.-J.; et al. Wide-field auroral imager onboard the Fengyun satellite. Light Sci. Appl. 2019, 8, 47. [Google Scholar] [CrossRef] [PubMed]
- Gerard, T.; Zhu, P.; Martin, S.; Zhang, P.; Ye, X. Characteristics of solar-irradiance spectra from measurements, modeling, and theoretical approach. Light Sci. Appl. 2022, 11, 79. [Google Scholar]
- Zhang, C.X.; Liu, C.; Hu, Q.H.; Cai, Z.N.; Su, W.J.; Xia, C.Z.; Zhu, Y.Z.; Wang, S.W.; Liu, J.G. Satellite UV-Vis spectroscopy: Implications for air quality trends and their driving forces in China during 2005–2017. Light Sci. Appl. 2019, 8, 100. [Google Scholar] [CrossRef]
- Crommelynck, D.; Fichot, A.; Domingo, V.; Lee, R. SOLCON Solar Constant Observations from the ATLAS Missions. Geophys. Res. Lett. 1996, 23, 2293–2295. [Google Scholar] [CrossRef]
- Zhou, D.; Xiao, J.; Bonafoni, S.; Berger, C.; Deilami, K.; Zhou, Y.; Frolking, S.; Yao, R.; Qiao, Z.; Sobrino, J.A. Satellite Remote Sensing of Surface Urban Heat Islands: Progress, Challenges, and Perspectives. Remote Sens. 2019, 11, 48. [Google Scholar] [CrossRef]
- BenMoussa, A.; Gissot, S.; Schühle, U.; Del Zanna, G.; Auchère, F.; Mekaoui, S.; Jones, A.R.; Walton, D.; Eyles, C.J.; Thuillier, G.; et al. On-Orbit Degradation of Solar Instruments. Solar Phys. 2013, 288, 389–434. [Google Scholar] [CrossRef]
- Foukal, P.; Fröhlich, C.; Spruit, H.; Wigley, T.M.L. Variations in Solar luminosity and Their Effect on the Earth’s Climate. Nature 2006, 443, 161–166. [Google Scholar] [CrossRef]
- Raymond, J.C.; Thompson, B.J.; St Cyr, O.C.; Gopalswamy, N.; Kahler, S.; Kaiser, M.; Lara, A.; Ciaravella, A.; Romoli, M.; O’Neal, R. SOHO and radio obserbations of a CME shock wave. Geophys. Res. Lett. 2000, 27, 1439–1442. [Google Scholar] [CrossRef]
- Sabri, M.; Steven, D.; Christian, C.; Andre, C. Total solar irradiance absolute level from DIARAD/SOVIM on the International Space Station. Adv. Space Res. 2010, 45, 1393–1406. [Google Scholar]
- Meftah, M.; Damé, L.; Bolsée, D.; Hauchecorne, A.; Pereira, N.; Sluse, D.; Cessateur, G.; Irbah, A.; Bureau, J.; Weber, M.; et al. SOLAR-ISS: A new reference spectrum based on SOLAR/SOLSPEC observations. Astron. Astrophys. 2018, 611, A1. [Google Scholar] [CrossRef]
- Klein, R.; Gottwald, A.; Kolbe, M.; Richter, M.; Scholze, F.; Thornagel, R. UV and VUV Calibration Capabilities at the Metrology Light Source for Solar and Atmospheric Research. In AIP Conference Proceedings, Proceedings of the AIP International Symposium on Radiation Processes in the Atmosphere and Ocean, Berlin, Germany, 6–10 August 2012; AIP Publishing: Long Island, NY, USA, 2013; Volume 1531, pp. 879–882. [Google Scholar]
- Meftah, M.; Dewitte, S.; Irbah, A.; Chevalier, A.; Conscience, C.; Crommelynck, D.; Janssen, E.; Mekaoui, S. SOVAP/Picard, a Spaceborne Radiometer to Measure the Total Solar Irradiance. Solar Phys. 2014, 289, 1885–1899. [Google Scholar] [CrossRef]
- Stephane, B.; Jerald, H.; Thomas, W. 10 years of degradation trends of the SORCE SIM instrument. Proc. SPIE 2013, 8862, 223–239. [Google Scholar]
- Domingo, V.; Fleck, B. SOHO: The solar and heliospheric observatory. Space Sci. Rev. 1995, 72, 81–84. [Google Scholar] [CrossRef]
- Conscience, C.; Meftah, M.; Chevalier, A.; Dewitte, S. The space instrument SOVAP of the PICARD mission. Proc. SPIE 2011, 8146, 434–452. [Google Scholar]
- Li, Z.; Wang, S.; Huang, Y.; Lin, G.; Shao, Y.; Yu, M. High-Precision and Short-Time Solar Forecasting by Spaceborne Solar Irradiance Spectrometer. Acta Opt. Sin. 2019, 39, 1–5. [Google Scholar]
- Fehlmann, A.; Kopp, G.; Schmutz, W.; Winkler, R.; Finsterle, W.; Fox, N. Fourth World Radiometric Reference to SI radiometric scale comparison and implications for on-orbit measurements of the total solar irradiance. Metrologia 2012, 49, s34–s38. [Google Scholar] [CrossRef]
- Domingo, V.; Ermolli, I.; Fox, P.; Fröhlich, C.; Haberreiter, M.; Krivova, N.; Kopp, G.; Schmutz, W.; Solanki, S.; Spruit, H.C.; et al. Solar Surface Magnetism and Irradiance on Time Scales from Days to the 11-Year Cycle. Space Sci. Rev. 2009, 145, 337–380. [Google Scholar] [CrossRef]
- Mekaoui, S.; Dewitte, S. Total Solar Irradiance Measurement and Modelling during Cycle 23. Solar Phys. 2008, 247, 203–216. [Google Scholar] [CrossRef]
- Ye, X.; Yi, X.; Lin, C.; Fang, W.; Wang, K.; Xia, Z.; Ji, Z.; Zheng, Y.; Sun, D.; Quan, J. Instrument Development: Chinese Radiometric Benchmark of Reflected Solar Band Based on Space Cryogenic Absolute Radiometer. Remote Sens. 2020, 12, 2856. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Serial No. | Error/Deviation Item | Value of the Deviation | Value of the Error | Correction Plan | |
|---|---|---|---|---|---|
| 1 | Error caused by software time delay | T1 | - | 0.0175° | Cannot be rectified |
| 2 | T2 | - | 0.000035° | Can be ignored | |
| 3 | Software calculation error | - | 10−6 rad | Can be ignored | |
| 4 | Mechanical installation deviation and measurement error (angle of rotation around Z/X/Y in order) | Between the turntable and the satellite’s mounting surface | −0.30012′/0.13335′/−0.38334′ | 0.5″ | Rectified by the SECCS |
| 5 | Between the turntable’s mounting surface and the axis of the turntable coordinate system | −1.30744′/2.60464′/−0.27004′ | 0.5″ | Rectified by the SECCS | |
| 6 | Between the guide mirror and the axis of the turntable coordinate system | 1.05779′/−2.25331′/0.203515′ | 0.5″ | Rectified by the SECCS | |
| 7 | Between the guide mirror and the vis channel optical axis | 0.95779′/−1.95331′/0.303515′ | 0.5″ | Rectified by the guide mirror’s CPU software | |
| 8 | Error caused by the turntable’s tracking control | - | 0.01° | Cannot be rectified | |
| 9 | Deviation | Satellite attitude | - | 0.006° | Rectified by the SECCS |
| 10 | Error in data provided by the satellite | The solar vector error of the orbital coordinate system | - | 0.009° | Cannot be rectified |
| 11 | Error caused by the update time of the solar vector and the satellite attitude data | - | 40 t | Cannot be rectified | |
| 12 | Error caused by the cycle time of the orbit message | - | 0.07° | Cannot be rectified | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shao, Y.; Li, Z.; Yang, X.; Huang, Y.; Li, B.; Lin, G.; Li, J. Methods of Analyzing the Error and Rectifying the Calibration of a Solar Tracking System for High-Precision Solar Tracking in Orbit. Remote Sens. 2023, 15, 2213. https://doi.org/10.3390/rs15082213
Shao Y, Li Z, Yang X, Huang Y, Li B, Lin G, Li J. Methods of Analyzing the Error and Rectifying the Calibration of a Solar Tracking System for High-Precision Solar Tracking in Orbit. Remote Sensing. 2023; 15(8):2213. https://doi.org/10.3390/rs15082213
Chicago/Turabian StyleShao, Yingqiu, Zhanfeng Li, Xiaohu Yang, Yu Huang, Bo Li, Guanyu Lin, and Jifeng Li. 2023. "Methods of Analyzing the Error and Rectifying the Calibration of a Solar Tracking System for High-Precision Solar Tracking in Orbit" Remote Sensing 15, no. 8: 2213. https://doi.org/10.3390/rs15082213
APA StyleShao, Y., Li, Z., Yang, X., Huang, Y., Li, B., Lin, G., & Li, J. (2023). Methods of Analyzing the Error and Rectifying the Calibration of a Solar Tracking System for High-Precision Solar Tracking in Orbit. Remote Sensing, 15(8), 2213. https://doi.org/10.3390/rs15082213