

An Earth Observation Task Representation Model Supporting Dynamic Demand for Flood Disaster Monitoring and Management

Abstract
1. Introduction
2. Earth Observation Task Representation Model
2.1. Principles and Requirements
- Comprehensive: The need for a comprehensive fine-grain representation of EO task information. How a sensor planner understands and configures task planning constraints are determined by the description of the EO task.
- Dynamic: The need for a process description of an EO task. The life cycle of an EO task is described to satisfy the dynamics of flood monitoring and improve the efficiency of EO sensor resource utilization.
- Formality and extensibility: The need for formality and flexible extensibility. Concise descriptions of EO demands that can be tracked and documented with task information can be provided by models, while allowing extension to satisfy different use purposes.
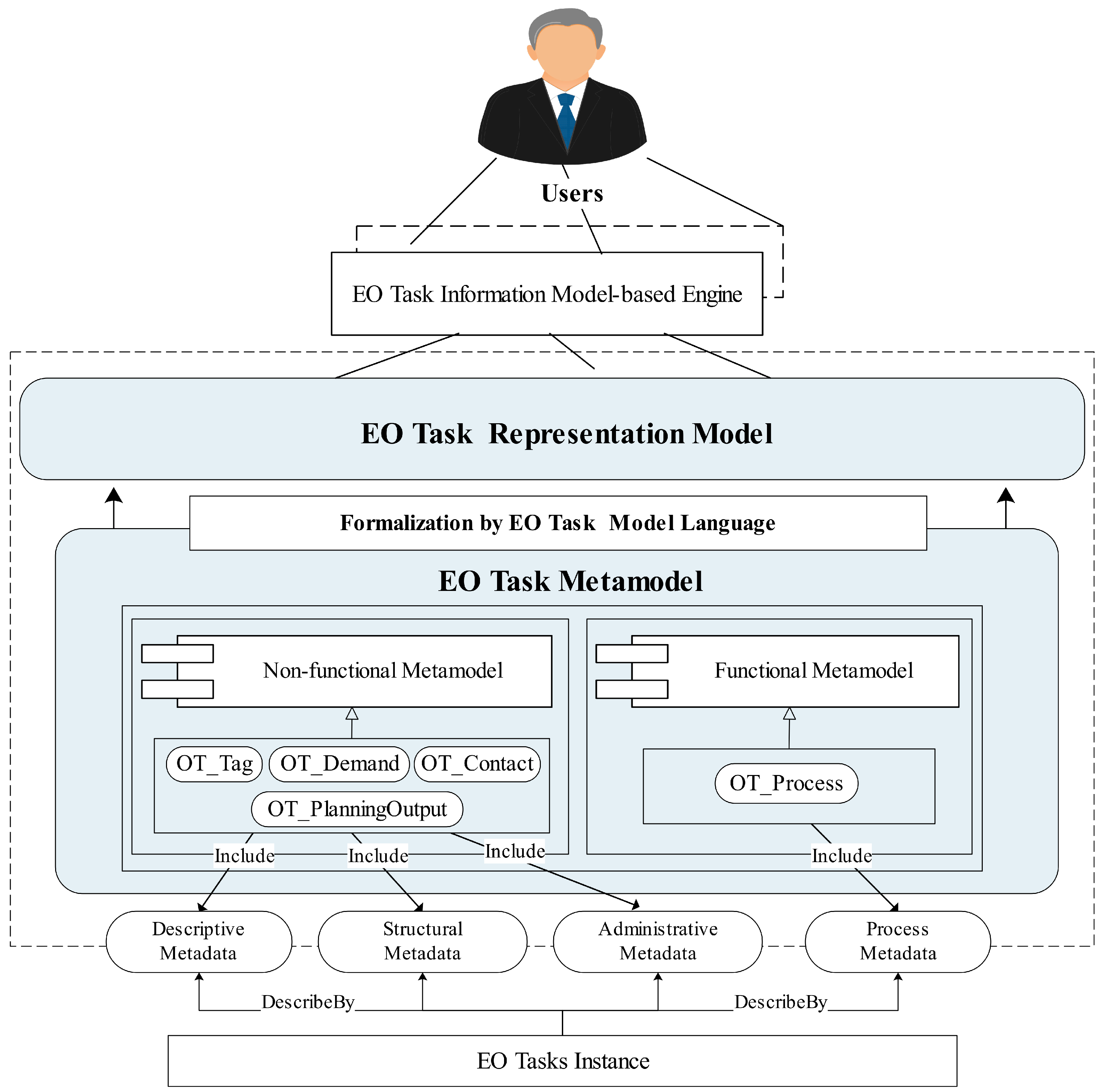
2.2. Information Organization of an Earth Observation Task
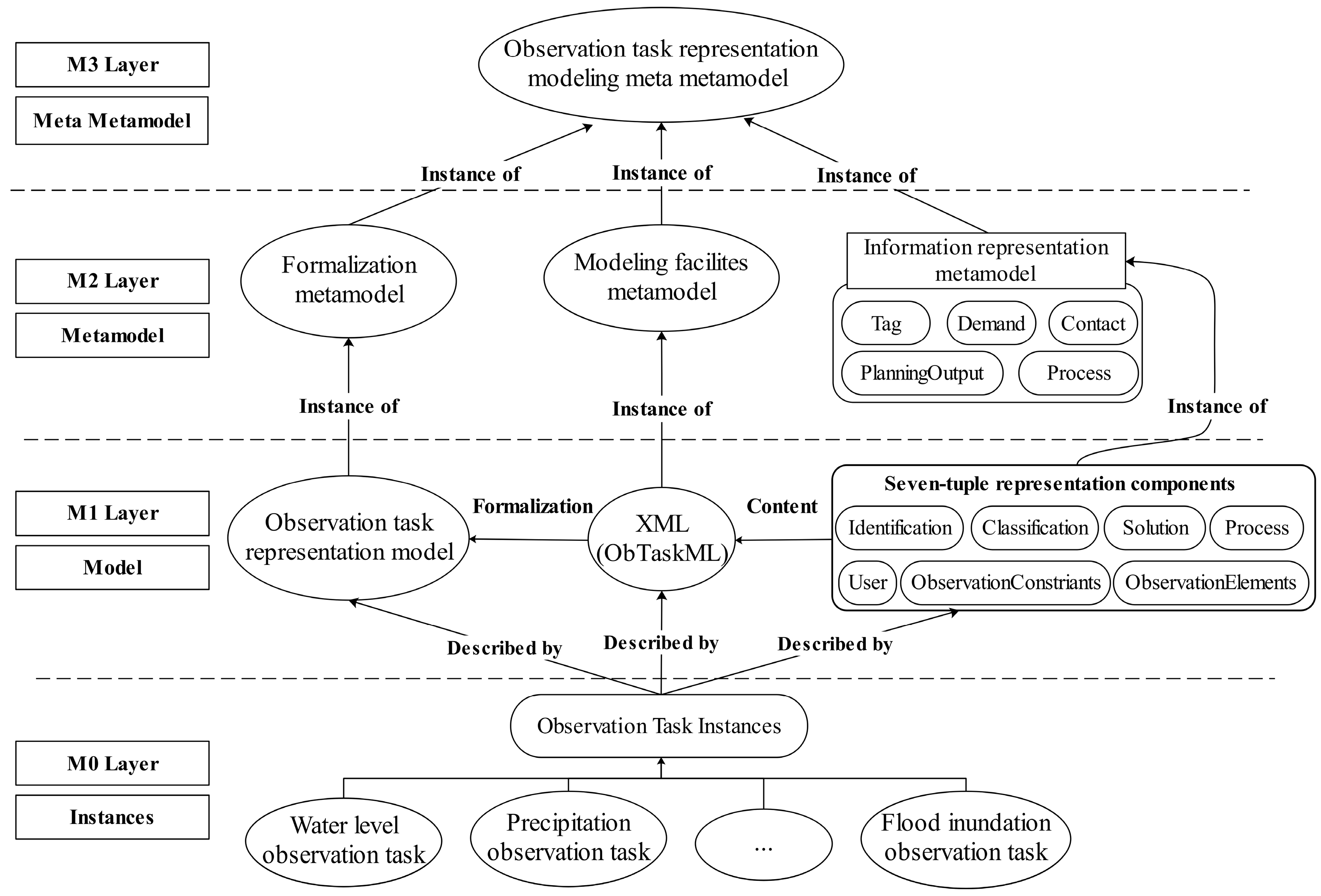
2.3. Metamodeling Architecture of Earth Observation Task Representation
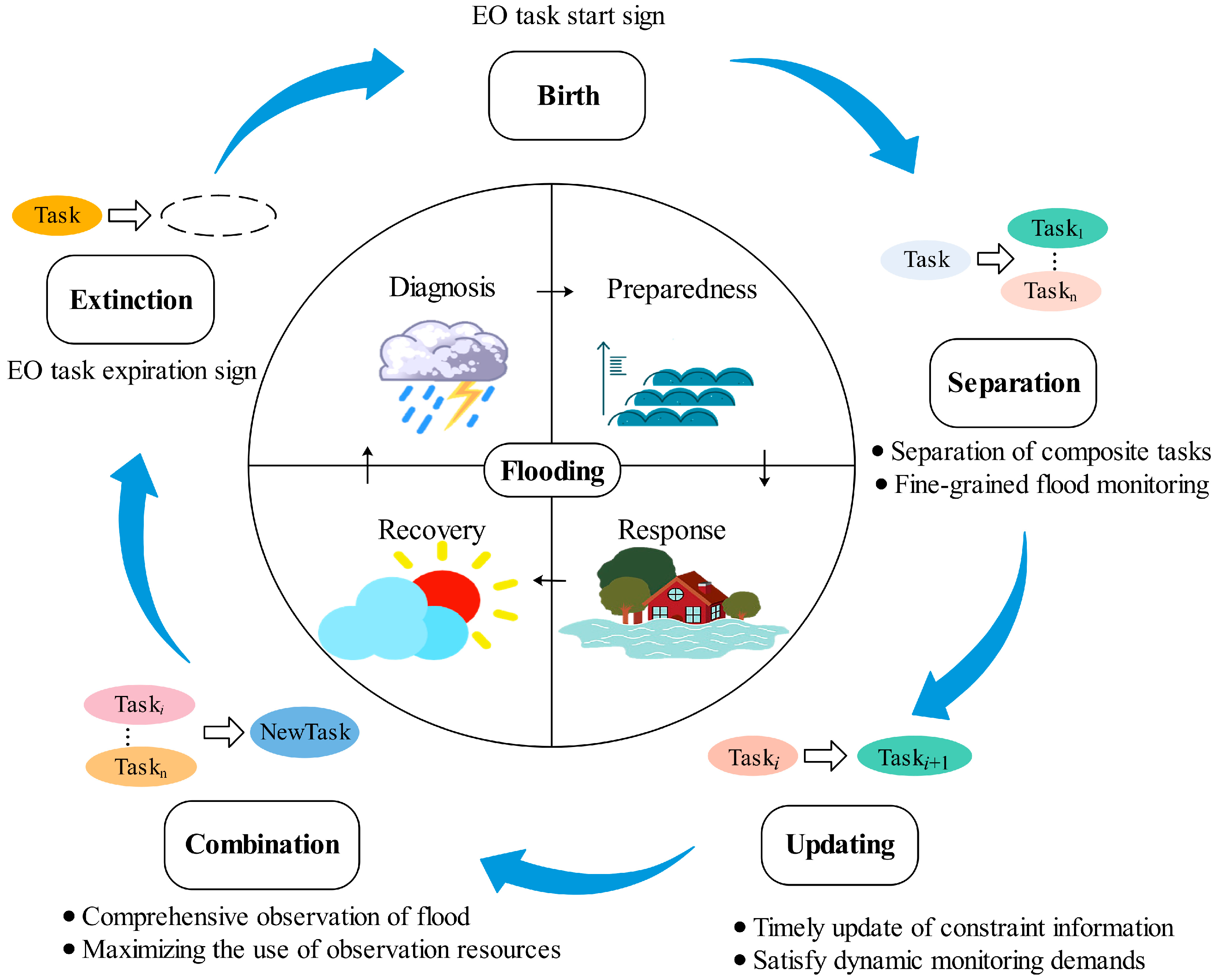
2.4. Dynamics of an Earth Observation Task with Full Life Cycle
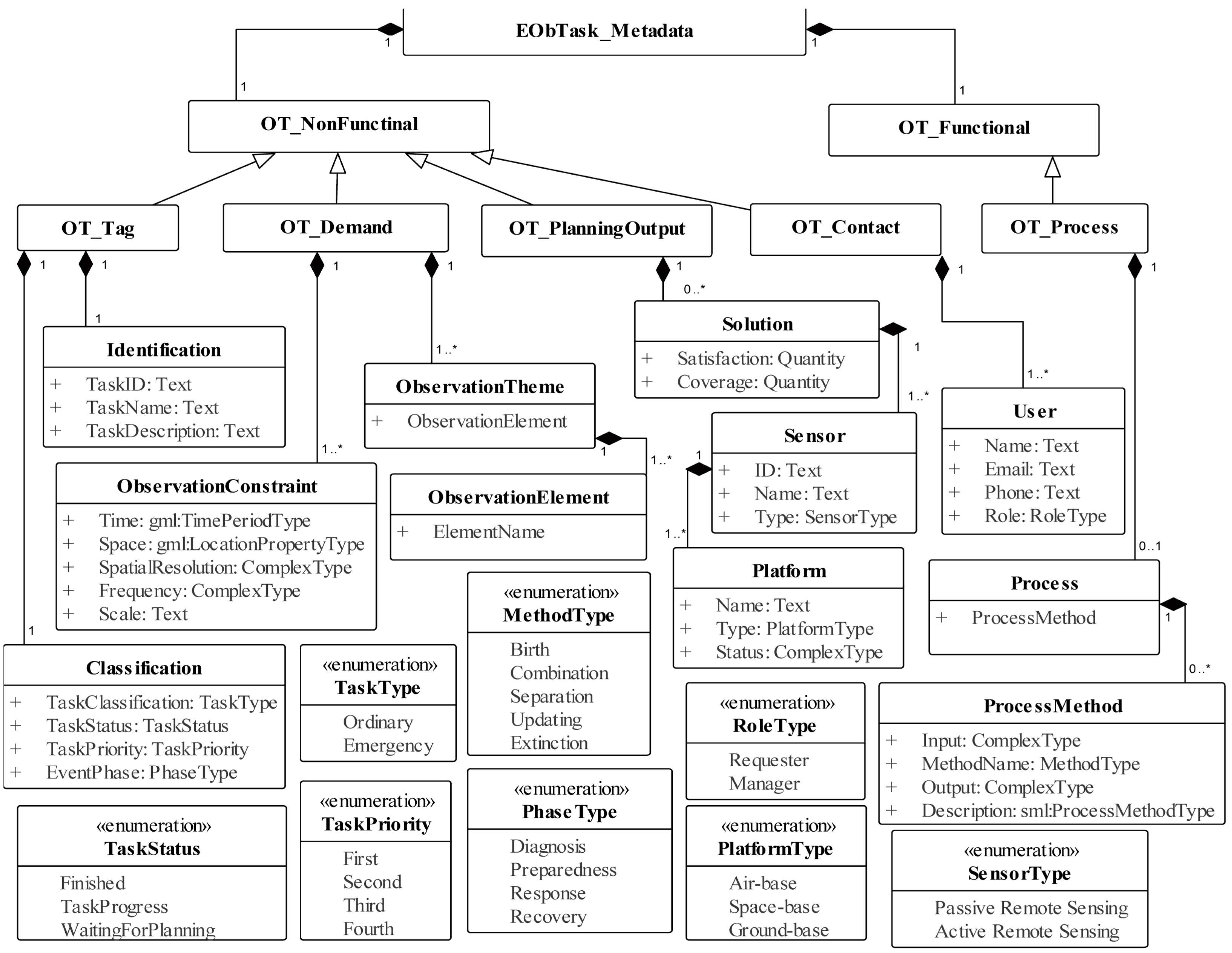
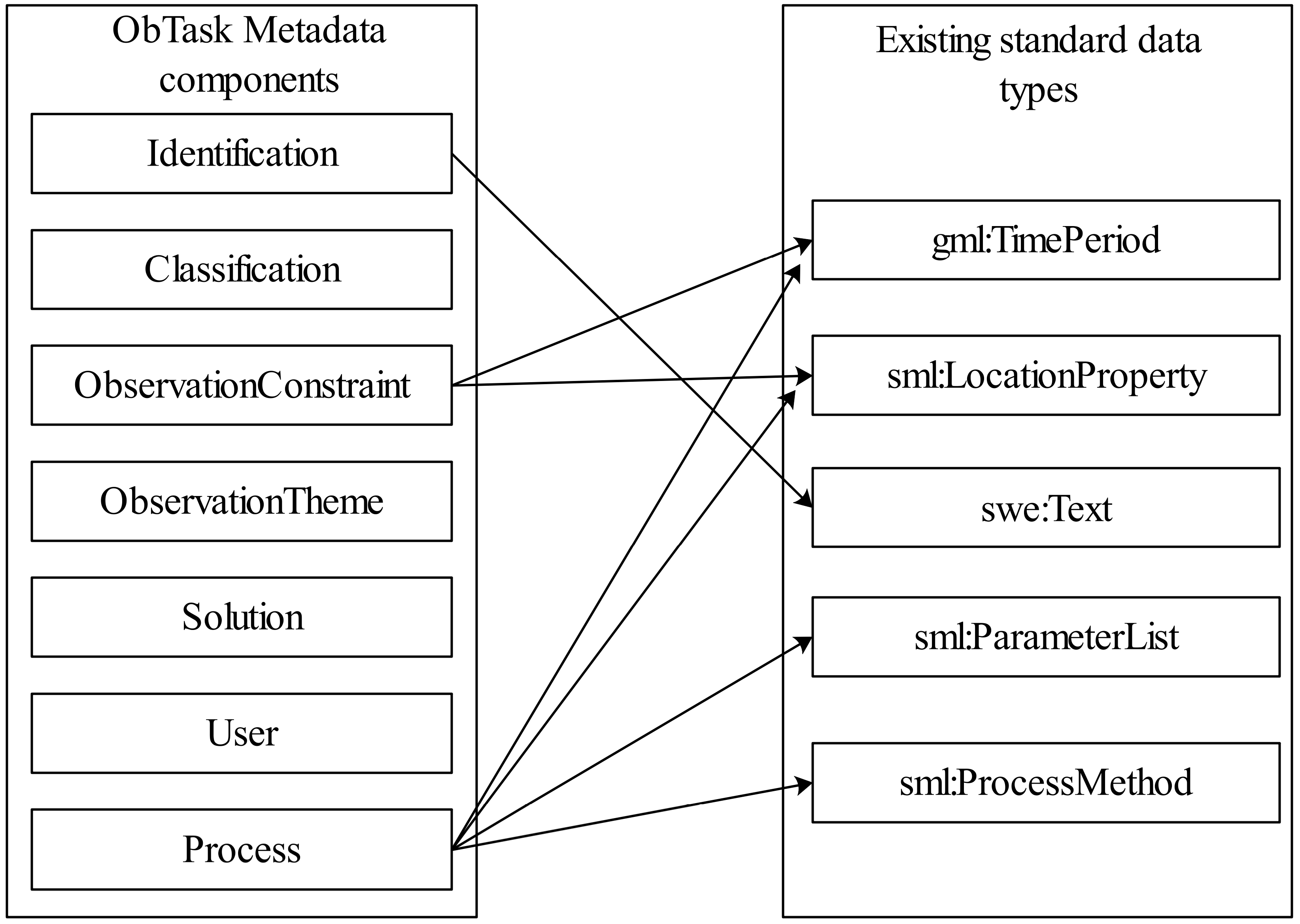
2.5. Contents of Earth Observation Task Representation
- (1)
- Identification includes the ID, name, and description of an EO task.
- (2)
- Classification includes task classification, status, priority, and event phase.
- (3)
- ObservationConstraint includes time, space, spatial resolution, observation frequency, and observation scale.
- (4)
- ObservationTheme includes information about observation elements.
- (5)
- Solution includes information about observation resources, such as sensor ID, name, and type.
- (6)
- User includes the contact information of the user, such his/her name, email address, phone number, and role.
- (7)
- Process includes the description of process methods, such as their input, name, and output.
2.6. Formalization of Earth Observation Task Representation Models
3. System Implementation and Experiment
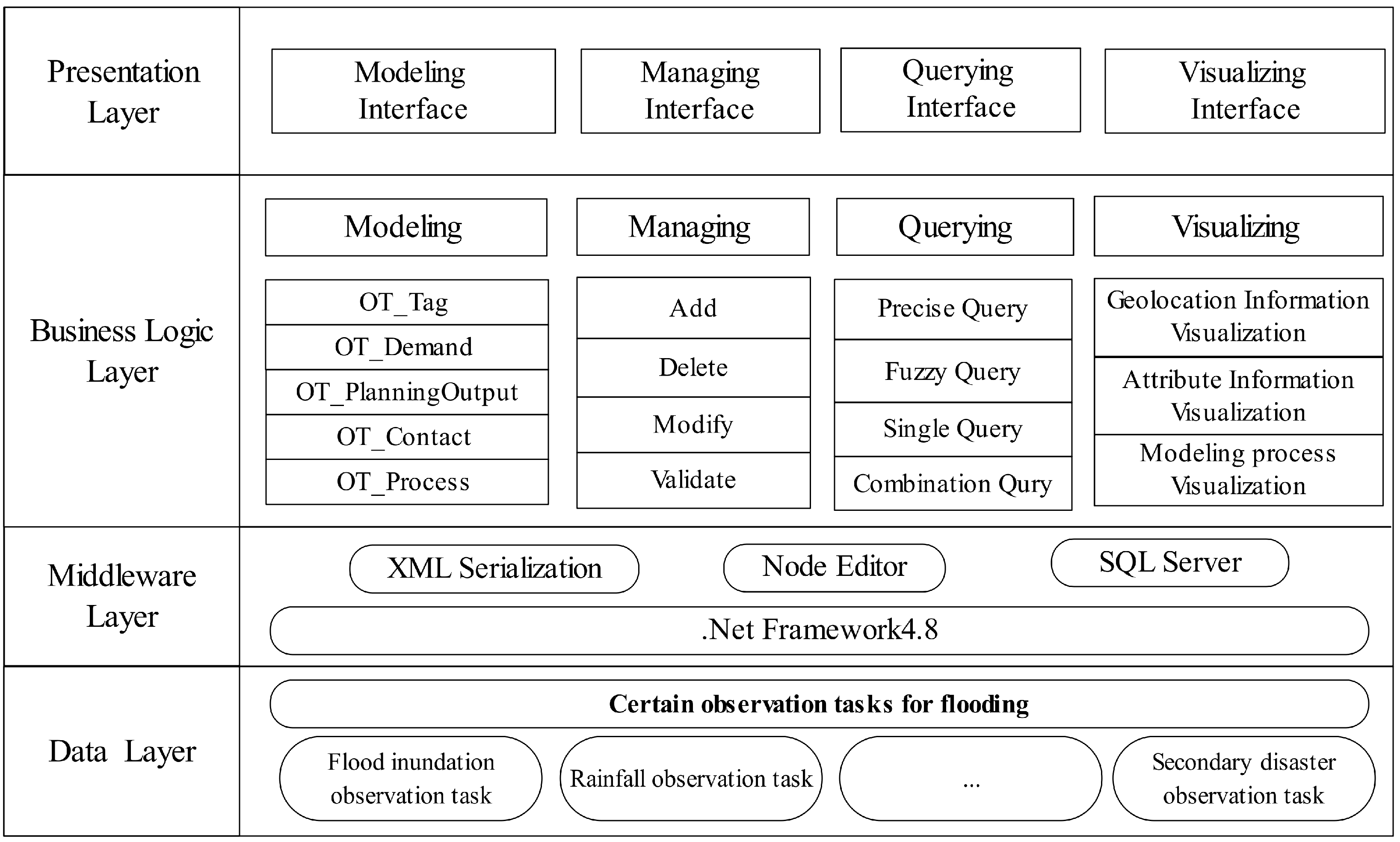
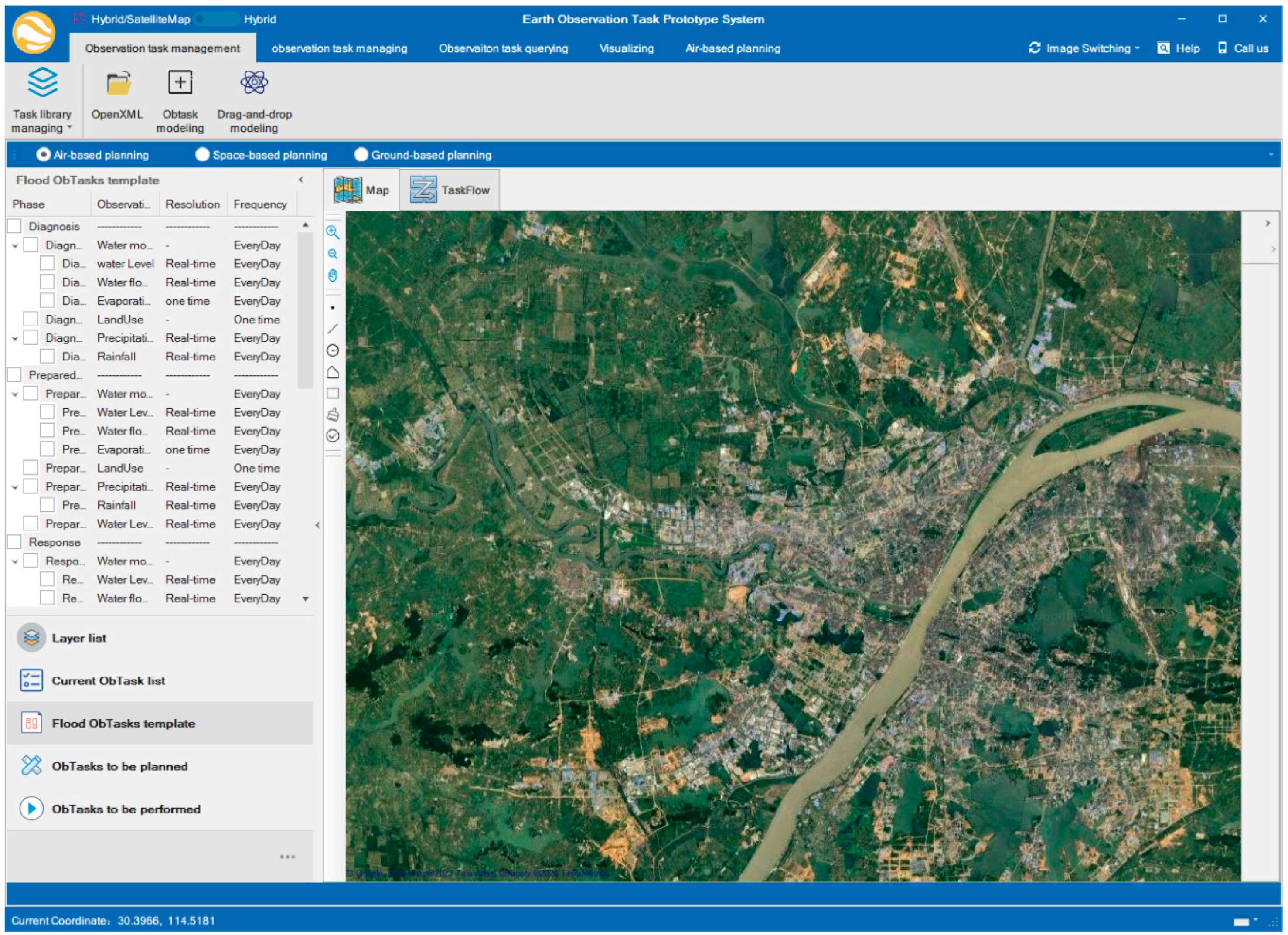
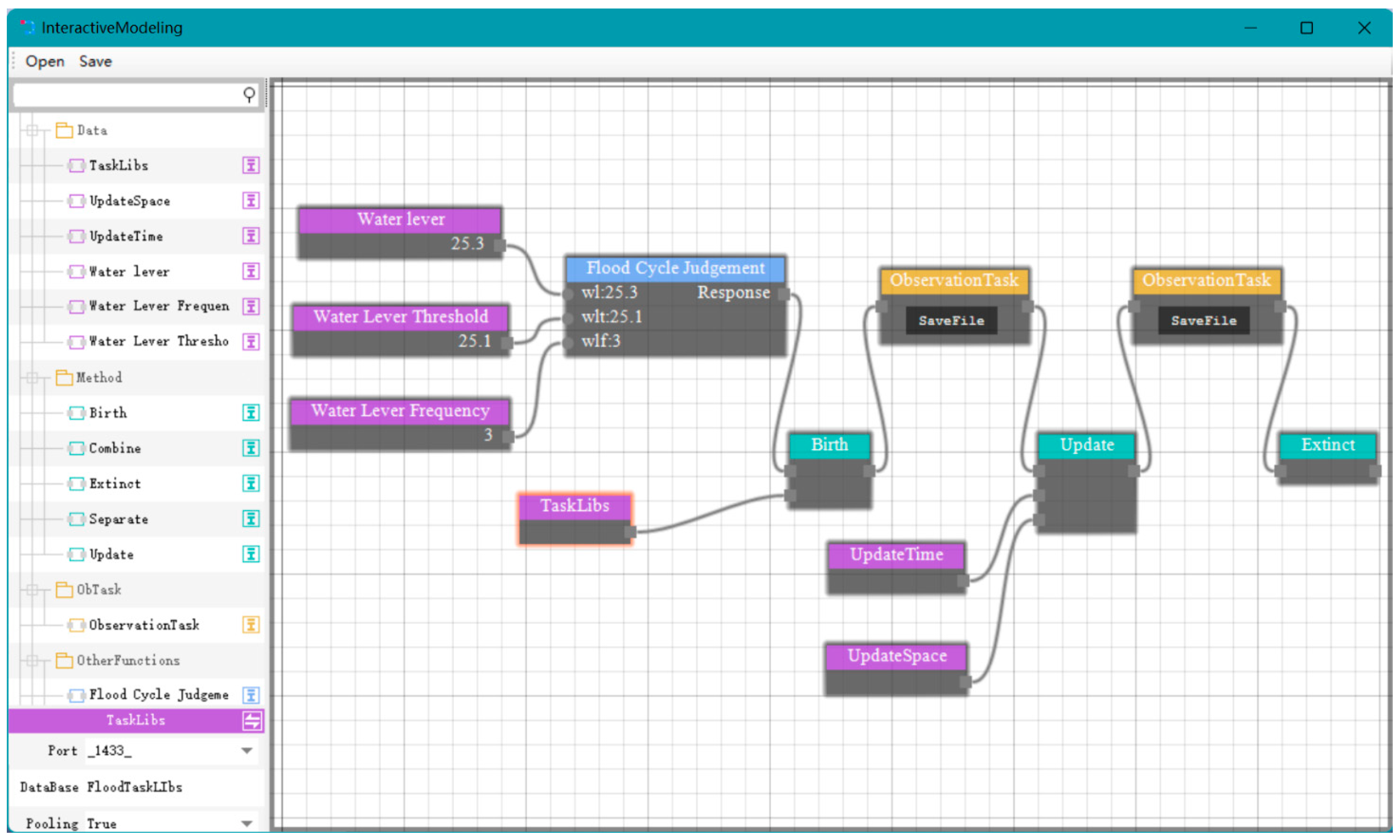
3.1. System Development
3.2. Flood-Oriented Earth Observation Task Experiments
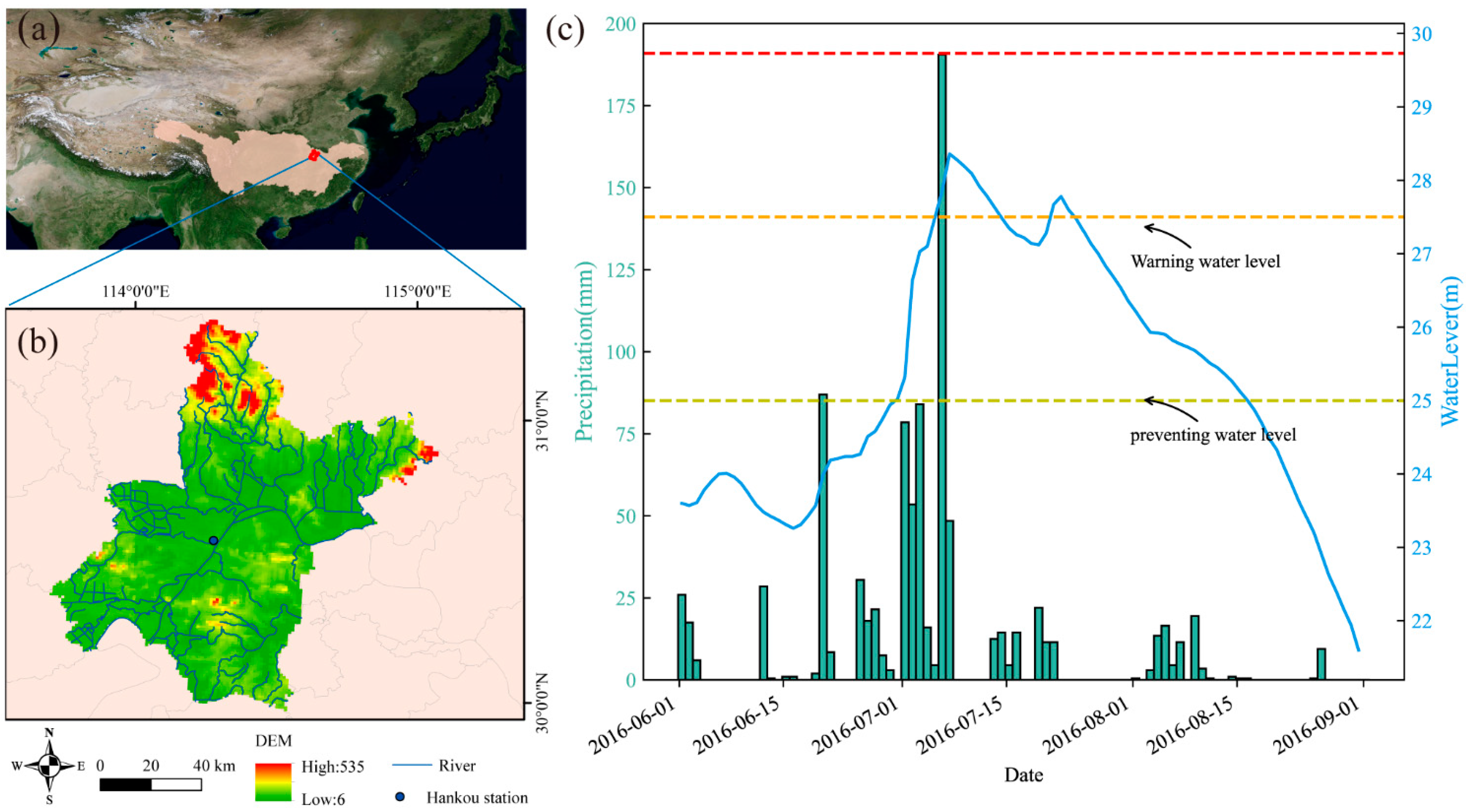
3.2.1. Experiment Background
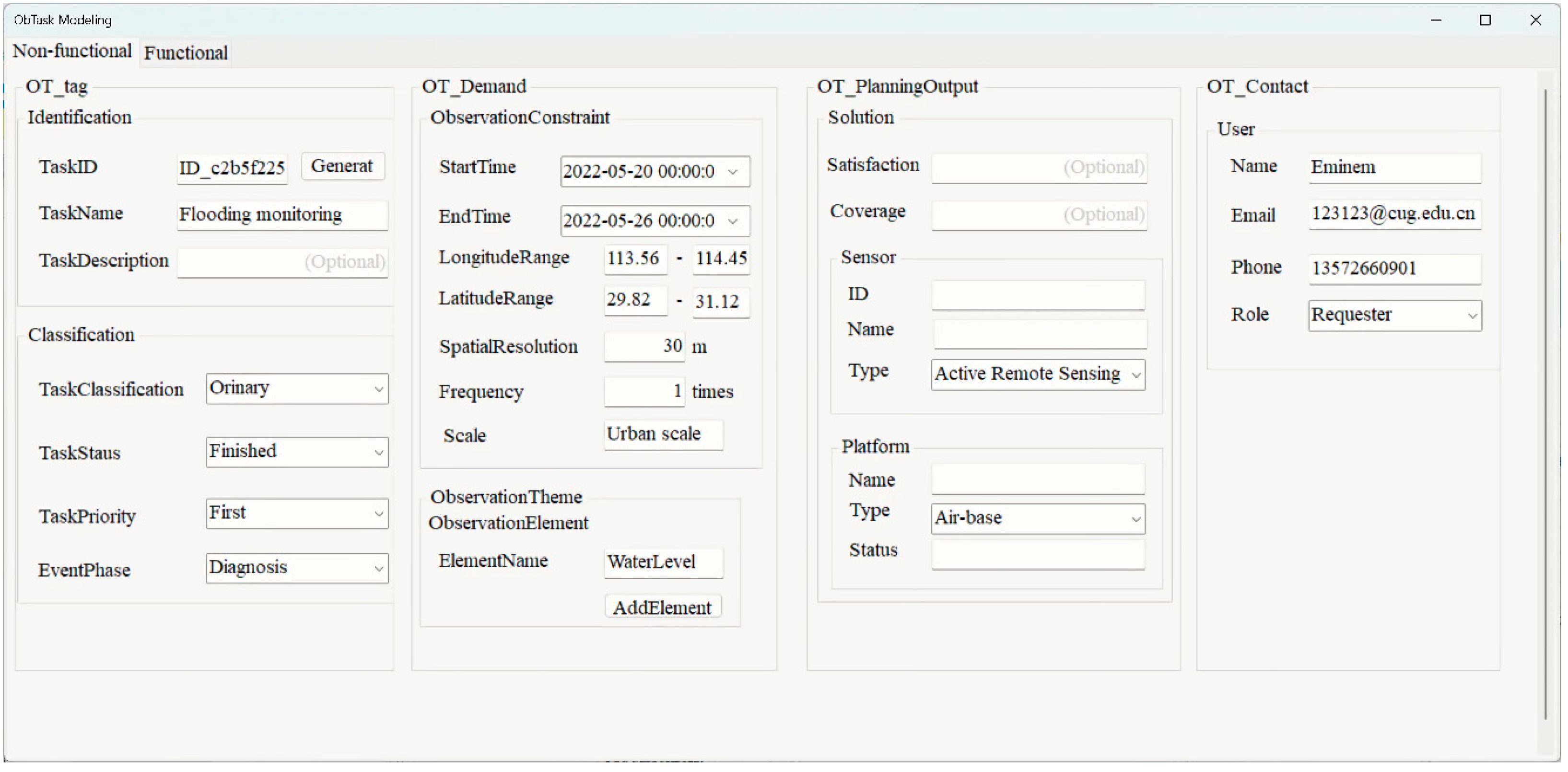
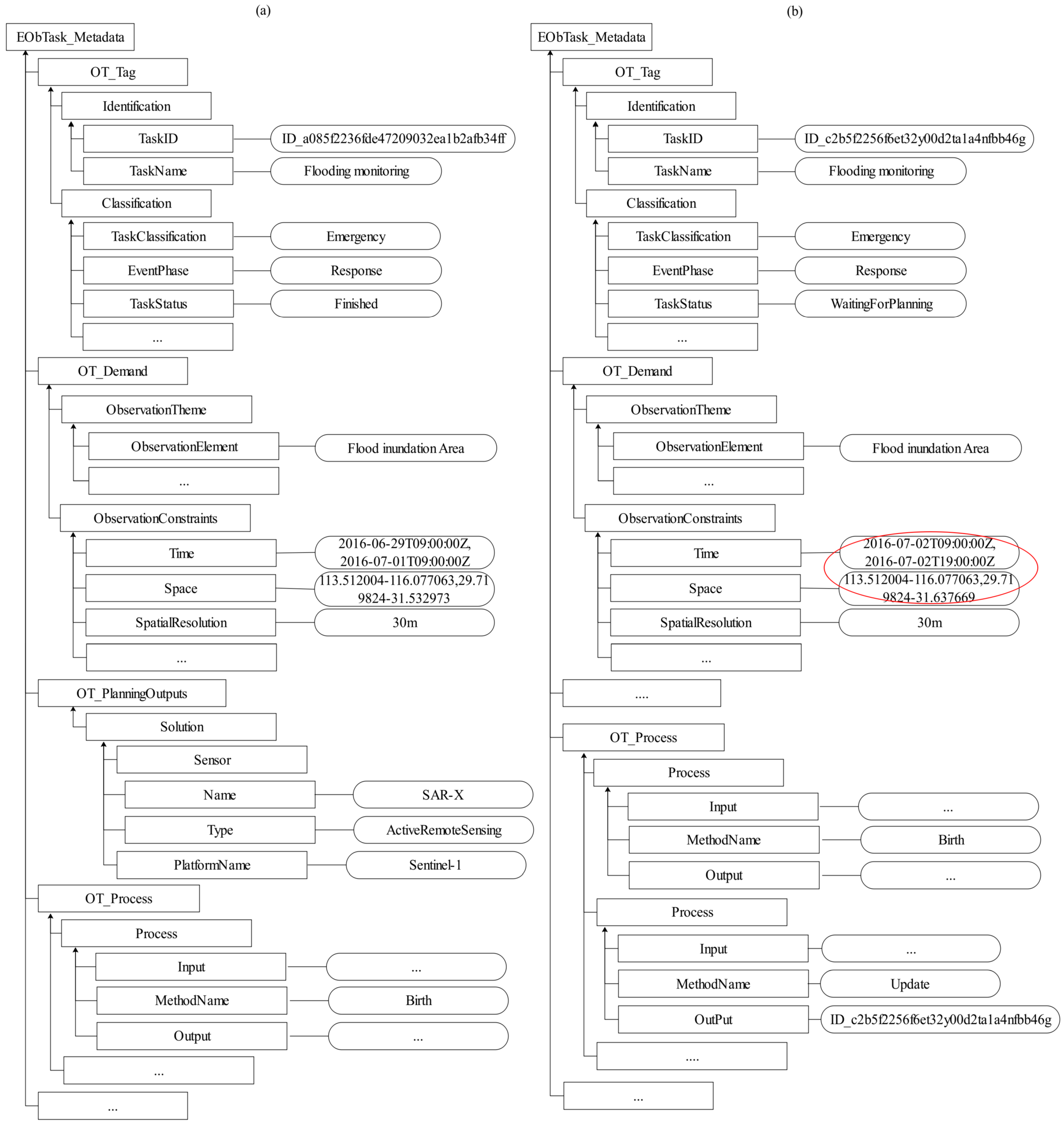
3.2.2. Representation Modeling of Flood Observation Task
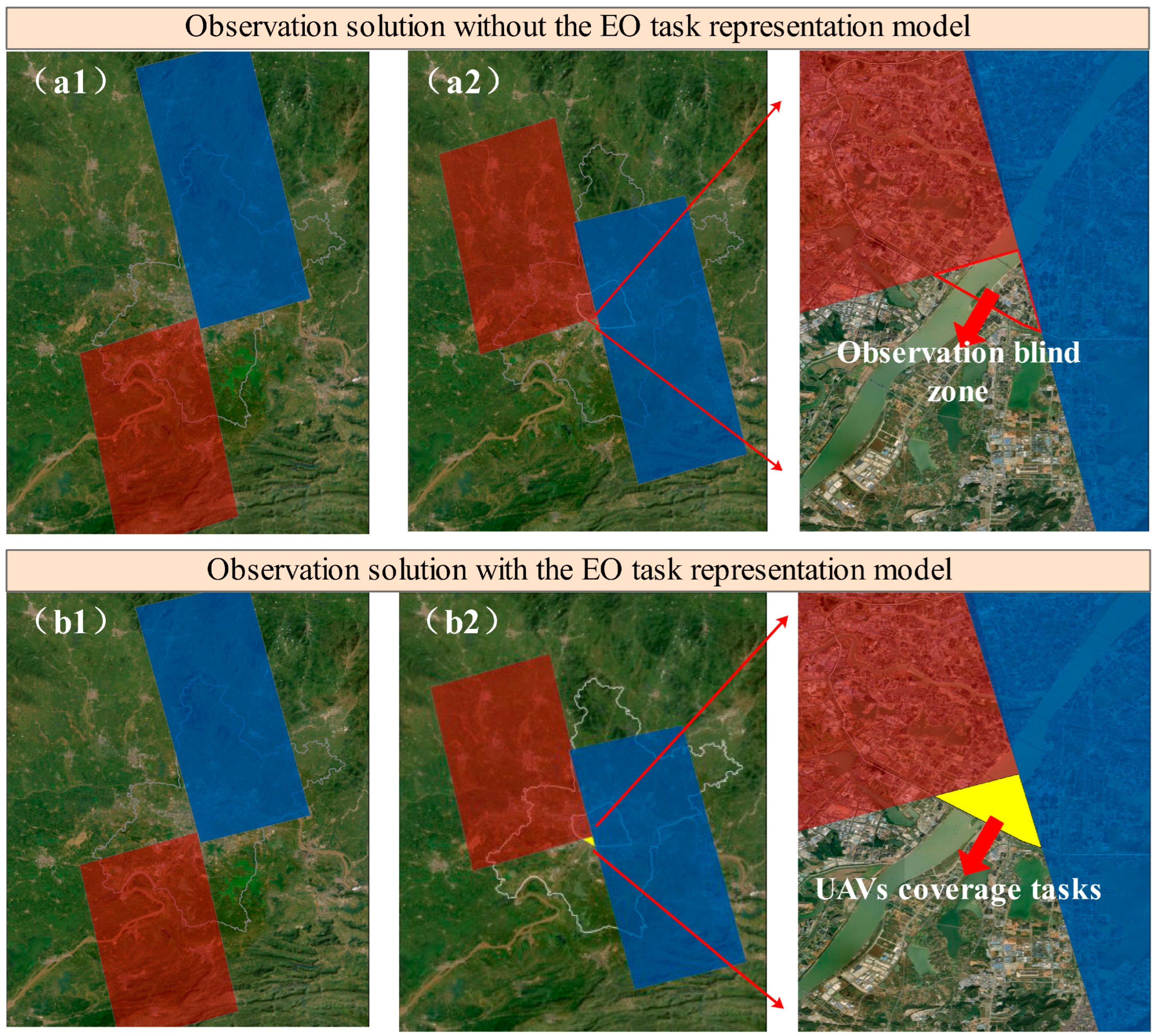
3.2.3. Coverage Effect Analysis Using EObTask
4. Discussion
4.1. Enhancement for Flood Disaster Management
4.2. Versatility and Extensibility
4.3. Advantages of the Observation Task Process
4.4. Comparison with Other Models
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
| Algorithm A1: Birth Algorithm |
| Input: Water level wl, Flood task list ftl, Water level thresholds for different flood cycle wi, Frequency thresholds for different flood cycle fi, Flood task graph composed of flood tasks in observation, Flood Task library G, Observation Task ObTask |
| Use: floodCycle ← DetermineFloodCycle (wl, wi, fi); |
| Output: new flood task list nftl |
 |
| Algorithm A2: Separation Algorithm |
| Input: Observation Task ObTask, Flood task library G Output: New flood task list nftl  |
| Algorithm A3: Combination Algorithm |
| Input: Flood atom task1 fat1, Flood atom task2 fat2 Output: Flood task newTask  |
| Algorithm A4: Updating Algorithm |
| Input: Observation task ObTask, Observation data Data Use: SFT ← SensingOfFloodTask (Data); Output: Observation task ObTask  |
| Algorithm A5: Extinction Algorithm |
| Input: Flood task list ftl, Current time time Output: New flood task list nftl  |
References
- Cortes, M.; Turco, M.; Ward, P.; Sanchez-Espigares, J.A.; Alfieri, L.; Llasat, M.C. Changes in Flood Damage with Global Warming on the Eastern Coast of Spain. Nat. Hazards Earth Syst. Sci. 2019, 19, 2855–2877. [Google Scholar] [CrossRef]
- Wang, S.; Zhang, K.; Chao, L.; Li, D.; Tian, X.; Bao, H.; Chen, G.; Xia, Y. Exploring the Utility of Radar and Satellite-Sensed Precipitation and Their Dynamic Bias Correction for Integrated Prediction of Flood and Landslide Hazards. J. Hydrol. 2021, 603, 126964. [Google Scholar] [CrossRef]
- Bates, P.D.; Quinn, N.; Sampson, C.; Smith, A.; Wing, O.; Sosa, J.; Savage, J.; Olcese, G.; Neal, J.; Schumann, G.; et al. Combined Modeling of US Fluvial, Pluvial, and Coastal Flood Hazard under Current and Future Climates. Water Resour. Res. 2021, 57, e2020WR028673. [Google Scholar] [CrossRef]
- Rentschler, J.; Salhab, M.; Jafino, B.A. Flood Exposure and Poverty in 188 Countries. Nat. Commun. 2022, 13, 3527. [Google Scholar] [CrossRef] [PubMed]
- Othman, S.H.; Beydoun, G. A Metamodel-Based Knowledge Sharing System for Disaster Management. Expert Syst. Appl. 2016, 63, 49–65. [Google Scholar] [CrossRef]
- Adikari, K.E.; Shrestha, S.; Ratnayake, D.T.; Budhathoki, A.; Mohanasundaram, S.; Dailey, M.N. Evaluation of Artificial Intelligence Models for Flood and Drought Forecasting in Arid and Tropical Regions. Environ. Model. Softw. 2021, 144, 105136. [Google Scholar] [CrossRef]
- Chen, N.; Du, W.; Song, F.; Chen, Z. FLCNDEMF: An Event Metamodel for Flood Process Information Management under the Sensor Web Environment. Remote Sens. 2015, 7, 7231–7256. [Google Scholar] [CrossRef]
- Yang, C.; Luo, J.; Hu, C.; Tian, L.; Li, J.; Wang, K. An Observation Task Chain Representation Model for Disaster Process-Oriented Remote Sensing Satellite Sensor Planning: A Flood Water Monitoring Application. Remote Sens. 2018, 10, 375. [Google Scholar] [CrossRef]
- Chen, N.; Wang, K.; Xiao, C.; Gong, J. A Heterogeneous Sensor Web Node Meta-Model for the Management of a Flood Monitoring System. Environ. Model. Softw. 2014, 54, 222–237. [Google Scholar] [CrossRef]
- Hu, C.; Tian, L.; Li, J.; Wang, K.; Chen, N. An Observation Capability Information Association Model for Multisensor Observation Integration Management: A Flood Observation Use Case in the Yangtze River Basin. IEEE Sens. J. 2019, 19, 11510–11525. [Google Scholar] [CrossRef]
- Chen, N.; Xing, C.; Zhang, X.; Zhang, L.; Gong, J. Spaceborne Earth-Observing Optical Sensor Static Capability Index for Clustering. IEEE Trans. Geosci. Remote Sens. 2015, 53, 5504–5518. [Google Scholar] [CrossRef]
- Tellman, B.; Sullivan, J.; Kuhn, C.; Kettner, A.; Doyle, C.; Brakenridge, G.; Erickson, T.; Slayback, D. Satellite Imaging Reveals Increased Proportion of Population Exposed to Floods. Nature 2021, 596, 80–86. [Google Scholar] [CrossRef] [PubMed]
- Li, D.; Wang, M.; Dong, Z.; Shen, X.; Shi, L. Earth Observation Brain (EOB): An Intelligent Earth Observation System. Geo-Spat. Inf. Sci. 2017, 20, 134–140. [Google Scholar] [CrossRef]
- Xiao, C.; Chen, N.; Wang, K. Design and Implementation of Geospatial Sensor Web Node Management Prototype System. In Proceedings of the 2013 21st International Conference on Geoinformatics, Kaifeng, China, 19–21 June 2013; pp. 1–5. [Google Scholar]
- Du, W.; Chen, N.; Yuan, S.; Wang, C.; Huang, M.; Shen, H. Sensor Web-Enabled Flood Event Process Detection and Instant Service. Environ. Model. Softw. 2019, 117, 29–42. [Google Scholar] [CrossRef]
- Copernicus Emergency Management Service. Available online: https://emergency.copernicus.eu/ (accessed on 23 March 2023).
- Sentinel Asia. Available online: https://sentinel-asia.org/ (accessed on 24 March 2023).
- About the Charter-International Disasters Charter. Available online: https://disasterscharter.org/web/guest/about-the-charter (accessed on 22 March 2023).
- Kreibich, H.; Di Baldassarre, G.; Vorogushyn, S.; Aerts, J.C.; Apel, H.; Aronica, G.T.; Arnbjerg-Nielsen, K.; Bouwer, L.M.; Bubeck, P.; Caloiero, T.; et al. Adaptation to Flood Risk: Results of International Paired Flood Event Studies. Earth’s Future 2017, 5, 953–965. [Google Scholar] [CrossRef]
- Kumar, P.; Debele, S.E.; Sahani, J.; Rawat, N.; Marti-Cardona, B.; Alfieri, S.M.; Basu, B.; Basu, A.S.; Bowyer, P.; Charizopoulos, N.; et al. An Overview of Monitoring Methods for Assessing the Performance of Nature-Based Solutions against Natural Hazards. Earth Sci. Rev. 2021, 217, 103603. [Google Scholar] [CrossRef]
- Varlas, G.; Anagnostou, M.N.; Spyrou, C.; Papadopoulos, A.; Kalogiros, J.; Mentzafou, A.; Michaelides, S.; Baltas, E.; Karymbalis, E.; Katsafados, P. A Multi-Platform Hydrometeorological Analysis of the Flash Flood Event of 15 November 2017 in Attica, Greece. Remote Sens. 2018, 11, 45. [Google Scholar] [CrossRef]
- Othman, S.H.; Beydoun, G. Model-Driven Disaster Management. Inf. Manag. 2013, 50, 218–228. [Google Scholar] [CrossRef]
- Global Flood Awareness System (Glofas-Gfm). Available online: https://www.globalfloods.eu/technical-information/glofas-gfm/ (accessed on 22 March 2023).
- Global Flood Monitoring System (GFMS). Available online: http://flood.umd.edu/ (accessed on 22 March 2023).
- European Flood Awareness System|Copernicus. Available online: https://www.copernicus.eu/en/european-flood-awareness-system (accessed on 26 March 2023).
- The Flood Observatory. Available online: https://floodobservatory.colorado.edu/ (accessed on 22 March 2023).
- Jafari, N.H.; Li, X.; Chen, Q.; Le, C.-Y.; Betzer, L.P.; Liang, Y. Real-Time Water Level Monitoring Using Live Cameras and Computer Vision Techniques. Comput. Geosci. 2021, 147, 104642. [Google Scholar] [CrossRef]
- JAXA Global Rainfall Watch (GSMaP). Available online: https://sharaku.eorc.jaxa.jp/GSMaP/ (accessed on 22 March 2023).
- ECMWF Charts. Available online: https://charts.ecmwf.int/products/medium-rain-acc?base_time=202303211200&projection=opencharts_europe&valid_time=202303211200 (accessed on 22 March 2023).
- Schumann, G.J.; Brakenridge, G.R.; Kettner, A.J.; Kashif, R.; Niebuhr, E. Assisting Flood Disaster Response with Earth Observation Data and Products: A Critical Assessment. Remote Sens. 2018, 10, 1230. [Google Scholar] [CrossRef]
- Zeng, Z.; Guan, D.; Steenge, A.E.; Xia, Y.; Mendoza-Tinoco, D. Flood Footprint Assessment: A New Approach for Flood-Induced Indirect Economic Impact Measurement and Post-Flood Recovery. J. Hydrol. 2019, 579, 124204. [Google Scholar] [CrossRef]
- Jian, W.; Li, S.; Lai, C.; Wang, Z.; Cheng, X.; Lo, E.Y.-M.; Pan, T.-C. Evaluating Pluvial Flood Hazard for Highly Urbanised Cities: A Case Study of the Pearl River Delta Region in China. Nat. Hazard. 2021, 105, 1691–1719. [Google Scholar] [CrossRef]
- Zhu, L.; He, S.; Qin, H.; He, W.; Zhang, H.; Zhang, Y.; Jian, J.; Li, J.; Su, P. Analyzing the Multi-Hazard Chain Induced by a Debris Flow in Xiaojinchuan River, Sichuan, China. Eng. Geol. 2021, 293, 106280. [Google Scholar] [CrossRef]
- Lan, H.; Peng, J.; Zhu, Y.; Li, L.; Pan, B.; Huang, Q.; Li, J.; Zhang, Q. Research on Geological and Surfacial Processes and Major Disaster Effects in the Yellow River Basin. Sci. China Earth Sci. 2022, 65, 234–256. [Google Scholar] [CrossRef]
- Jones, E.; Botterell, A. Common Alerting Protocol, Version 1.1; OASIS: Burlington, MA, USA, 2005.
- Raymond, M.; Webb, S.; Aymond, P. Emergency Data Exchange Language (EDXL) Distribution Element, Version 1.0; OASIS: Burlington, MA, USA, 2006.
- Aymond, P.; Brooks, R.; Grapes, T.; Ham, G.; Iannella, R.; Robinson, K.; Joerg, W.; Triglia, A. Emergency Data Exchange Language Resource Messaging (EDXL-RM), Version 1.0; OASIS: Burlington, MA, USA, 2009.
- Iannella, R.; Robinson, K. Tsunami Warning Markup Language (TWML), Version 1.0; National ICT Australia: Sydney, Australia, 2006.
- Babaie, H.A.; Babaei, A. Developing the Earthquake Markup Language and Database with UML and XML Schema. Comput. Geosci. 2005, 31, 1175–1200. [Google Scholar] [CrossRef]
- Xiang, Z.; Demir, I. Flood Markup Language—A Standards-Based Exchange Language for Flood Risk Communication. Environ. Model. Softw. 2022, 152, 105397. [Google Scholar] [CrossRef]
- Scherp, A.; Franz, T.; Saathoff, C.; Staab, S. F--A Model of Events Based on the Foundational Ontology Dolce+DnS Ultralight. In Proceedings of the Fifth International Conference on Knowledge Capture, 1 September 2009; Association for Computing Machinery: New York, NY, USA, 2009; pp. 137–144. [Google Scholar]
- Chen, N.; Zhou, L.; Chen, Z. A Sharable and Efficient Metadata Model for Heterogeneous Earth Observation Data Retrieval in Multi-Scale Flood Mapping. Remote Sens. 2015, 7, 9610–9631. [Google Scholar] [CrossRef]
- Chen, N.; Hu, C. A Sharable and Interoperable Meta-Model for Atmospheric Satellite Sensors and Observations. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2012, 5, 1519–1530. [Google Scholar] [CrossRef]
- Sun, Z.; Yue, P.; Lu, X.; Zhai, X.; Hu, L. A Task Ontology Driven Approach for Live Geoprocessing in a Service-Oriented Environment. Trans. GIS 2012, 16, 867–884. [Google Scholar] [CrossRef]
- Atkinson, C.; Kuhne, T. Model-Driven Development: A Metamodeling Foundation. IEEE Softw. 2003, 20, 36–41. [Google Scholar] [CrossRef]
- Portele, C. OpenGIS Geography Markup Language (GML) Encoding Standard, Version 3.2.1 (OGC 07-036); Open Geospatial Consortium: Wayland, MA, USA, 2007.
- Botts, M.; Robin, A. OGC® SensorML: Model and XML Encoding Standard. OGC Encoding Standard, Version 2.0; Open Geospatial Consortium: Wayland, MA, USA, 2014.
- Robin, A. SWE Common Data Model, Encoding Standard, Version 2.0 (OGC 08-094r1); Open Geospatial Consortium: Wayland, MA, USA, 2010.
- Donlon, C.; Berruti, B.; Buongiorno, A.; Ferreira, M.-H.; Féménias, P.; Frerick, J.; Goryl, P.; Klein, U.; Laur, H.; Mavrocordatos, C.; et al. The Global Monitoring for Environment and Security (GMES) Sentinel-3 Mission. Remote Sens. Environ. 2012, 120, 37–57. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Task Representation of TICSMD | Task Representation of This Work | |
|---|---|---|
| 1 | Authorized user (AU) describes the observation demands through the user request form (URF). | Description of observation demands through a standardized EO task representation model. |
| 2 | AU needs to resubmit the URF when the observation demand changes with the evolution of the disaster. | Observation demands do not need to be resubmitted. The model supports updating the observation space and time through the task process mechanism. |
| 3 | Supports only AU descriptions of satellite-oriented task demands. | The model supports describing the different task demands of satellites, UAVs, and in situ stations. |
| Models | FloodML | FLCNDEM | OTChain | EObTask | |
|---|---|---|---|---|---|
| Support Features | |||||
| Dynamic observation information description | × | ¤ | ¤ | √ | |
| EO task process description | × | × | × | √ | |
| Observation interconnection | × | × | √ | √ | |
| Time-series observation planning | × | √ | √ | √ | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Z.; Hu, C.; Wang, K.; Zhang, Y.; Xu, Z.; Ding, X. An Earth Observation Task Representation Model Supporting Dynamic Demand for Flood Disaster Monitoring and Management. Remote Sens. 2023, 15, 2193. https://doi.org/10.3390/rs15082193
Zhao Z, Hu C, Wang K, Zhang Y, Xu Z, Ding X. An Earth Observation Task Representation Model Supporting Dynamic Demand for Flood Disaster Monitoring and Management. Remote Sensing. 2023; 15(8):2193. https://doi.org/10.3390/rs15082193
Chicago/Turabian StyleZhao, Zhongguo, Chuli Hu, Ke Wang, Yixiao Zhang, Zhangyan Xu, and Xuan Ding. 2023. "An Earth Observation Task Representation Model Supporting Dynamic Demand for Flood Disaster Monitoring and Management" Remote Sensing 15, no. 8: 2193. https://doi.org/10.3390/rs15082193
APA StyleZhao, Z., Hu, C., Wang, K., Zhang, Y., Xu, Z., & Ding, X. (2023). An Earth Observation Task Representation Model Supporting Dynamic Demand for Flood Disaster Monitoring and Management. Remote Sensing, 15(8), 2193. https://doi.org/10.3390/rs15082193