



Estimation of Tropical Cyclone Intensity Using Multi-Platform Remote Sensing and Deep Learning with Environmental Field Information

 , and
, and 
Abstract
1. Introduction
2. Data and Preprocessing
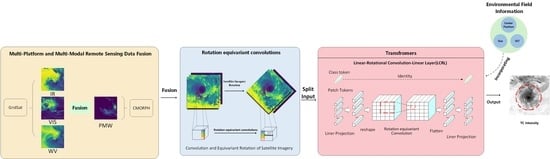
3. Methodology
4. Experiments and Discussion
4.1. Experimental Settings and Analysis of Ablation Study
4.2. Performance Analysis
4.3. Different Categories of Tc Intensity Estimation Analysis
4.4. Tc Environmental Factor Correlation Analysis
4.5. Hierarchical Analysis of Tcicvit Model Performance
4.6. Individual Case Analysis
4.7. Comparison to Other Satellite Estimation Methods
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Dvorak, V.F. Tropical Cyclone Intensity Analysis Using Satellite Data; US Department of Commerce, National Oceanic and Atmospheric Administration: Washington, DC, USA, 1984; Volume 11. [Google Scholar]
- Jaiswal, N.; Kishtawal, C.; Pal, P. Cyclone intensity estimation using similarity of satellite IR images based on histogram matching approach. Atmos. Res. 2012, 118, 215–221. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhao, C.; Sun, R.; Wang, Z. A multiple linear regression model for tropical cyclone intensity estimation from satellite infrared images. Atmosphere 2016, 7, 40. [Google Scholar] [CrossRef]
- Olander, T.L.; Velden, C.S. The advanced Dvorak technique (ADT) for estimating tropical cyclone intensity: Update and new capabilities. Weather Forecast. 2019, 34, 905–922. [Google Scholar] [CrossRef]
- Piñeros, M.F.; Ritchie, E.A.; Tyo, J.S. Estimating tropical cyclone intensity from infrared image data. Weather Forecast. 2011, 26, 690–698. [Google Scholar] [CrossRef]
- Piñeros, M.F.; Ritchie, E.A.; Tyo, J.S. Objective measures of tropical cyclone structure and intensity change from remotely sensed infrared image data. IEEE Trans. Geosci. Remote Sens. 2008, 46, 3574–3580. [Google Scholar] [CrossRef]
- Ritchie, E.A.; Wood, K.M.; Rodríguez-Herrera, O.G.; Piñeros, M.F.; Tyo, J.S. Satellite-derived tropical cyclone intensity in the North Pacific Ocean using the deviation-angle variance technique. Weather Forecast. 2014, 29, 505–516. [Google Scholar] [CrossRef]
- Krizhevsky, A. Learning Multiple Layers Ofmul Features from Tiny Images; University of Toronto: Toronto, ON, Canada, 2012. [Google Scholar]
- Ahn, B.; Park, J.; Kweon, I.S. Real-time head orientation from a monocular camera using deep neural network. In Proceedings of the Computer Vision–ACCV 2014: 12th Asian Conference on Computer Vision, Singapore, 1–5 November 2014; Revised Selected Papers, Part III. Springer: Berlin/Heidelberg, Germany, 2015; pp. 82–96. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Pradhan, R.; Aygun, R.S.; Maskey, M.; Ramachandran, R.; Cecil, D.J. Tropical cyclone intensity estimation using a deep convolutional neural network. IEEE Trans. Image Process. 2017, 27, 692–702. [Google Scholar] [CrossRef]
- Wimmers, A.; Velden, C.; Cossuth, J.H. Using deep learning to estimate tropical cyclone intensity from satellite passive microwave imagery. Mon. Weather Rev. 2019, 147, 2261–2282. [Google Scholar] [CrossRef]
- Dawood, M.; Asif, A.; Minhas, F.u.A.A. Deep-PHURIE: Deep learning based hurricane intensity estimation from infrared satellite imagery. Neural Comput. Appl. 2020, 32, 9009–9017. [Google Scholar] [CrossRef]
- Combinido, J.S.; Mendoza, J.R.; Aborot, J. A convolutional neural network approach for estimating tropical cyclone intensity using satellite-based infrared images. In Proceedings of the 2018 24th International Conference on Pattern Recognition (ICPR), Beijing, China, 20–24 August 2018; pp. 1474–1480. [Google Scholar]
- Dosovitskiy, A.; Beyer, L.; Kolesnikov, A.; Weissenborn, D.; Zhai, X.; Unterthiner, T.; Dehghani, M.; Minderer, M.; Heigold, G.; Gelly, S.; et al. An image is worth 16×16 words: Transformers for image recognition at scale. arXiv 2020, arXiv:2010.11929. [Google Scholar]
- Carion, N.; Massa, F.; Synnaeve, G.; Usunier, N.; Kirillov, A.; Zagoruyko, S. End-to-end object detection with transformers. In Proceedings of the Computer Vision–ECCV 2020: 16th European Conference, Glasgow, UK, 23–28 August 2020; Proceedings, Part I 16. Springer: Berlin/Heidelberg, Germany, 2020; pp. 213–229. [Google Scholar]
- Wang, H.; Zhu, Y.; Adam, H.; Yuille, A.; Chen, L.C. Max-deeplab: End-to-end panoptic segmentation with mask transformers. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 20–25 June 2021; pp. 5463–5474. [Google Scholar]
- Chen, X.; Yan, B.; Zhu, J.; Wang, D.; Yang, X.; Lu, H. Transformer tracking. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 20–25 June 2021; pp. 8126–8135. [Google Scholar]
- Jiang, Y.; Chang, S.; Wang, Z. Transgan: Two pure transformers can make one strong gan, and that can scale up. Adv. Neural Inf. Process. Syst. 2021, 34, 14745–14758. [Google Scholar]
- Chen, H.; Wang, Y.; Guo, T.; Xu, C.; Deng, Y.; Liu, Z.; Ma, S.; Xu, C.; Xu, C.; Gao, W. Pre-trained image processing transformer. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 20–25 June 2021; pp. 12299–12310. [Google Scholar]
- Chen, Z.M.; Cui, Q.; Zhao, B.; Song, R.; Zhang, X.; Yoshie, O. Sst: Spatial and semantic transformers for multi-label image recognition. IEEE Trans. Image Process. 2022, 31, 2570–2583. [Google Scholar] [CrossRef]
- Luo, W.; Li, Y.; Urtasun, R.; Zemel, R. Understanding the effective receptive field in deep convolutional neural networks. Adv. Neural Inf. Process. Syst. 2016, 29. [Google Scholar]
- Sun, L.; Cheng, S.; Zheng, Y.; Wu, Z.; Zhang, J. SPANet: Successive pooling attention network for semantic segmentation of remote sensing images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 4045–4057. [Google Scholar] [CrossRef]
- Sun, L.; Fang, Y.; Chen, Y.; Huang, W.; Wu, Z.; Jeon, B. Multi-structure KELM with attention fusion strategy for hyperspectral image classification. IEEE Trans. Geosci. Remote. Sens. 2022, 60, 5539217. [Google Scholar] [CrossRef]
- Chen, B.; Chen, B.F.; Lin, H.T. Rotation-blended CNNs on a new open dataset for tropical cyclone image-to-intensity regression. In Proceedings of the 24th ACM SIGKDD International Conference on Knowledge Discovery & Data Mining, London, UK, 19–23 August 2018; pp. 90–99. [Google Scholar]
- Inamdar, A.K.; Knapp, K.R. Intercomparison of independent calibration techniques applied to the visible channel of the ISCCP B1 data. J. Atmos. Ocean. Technol. 2015, 32, 1225–1240. [Google Scholar] [CrossRef]
- Knapp, K.R.; Ansari, S.; Bain, C.L.; Bourassa, M.A.; Dickinson, M.J.; Funk, C.; Helms, C.N.; Hennon, C.C.; Holmes, C.D.; Huffman, G.J.; et al. Globally gridded satellite observations for climate studies. Bull. Am. Meteorol. Soc. 2011, 92, 893–907. [Google Scholar] [CrossRef]
- Joyce, R.J.; Janowiak, J.E.; Arkin, P.A.; Xie, P. CMORPH: A method that produces global precipitation estimates from passive microwave and infrared data at high spatial and temporal resolution. J. Hydrometeorol. 2004, 5, 487–503. [Google Scholar] [CrossRef]
- Chu, J.H.; Sampson, C.R.; Levine, A.S.; Fukada, E. The Joint Typhoon Warning Center Tropical Cyclone Best-Tracks, 1945–2000; Ref. NRL/MR/7540-02; Joint Typhoon Warning Center: Honolulu, HI, USA, 2002; Volume 16. [Google Scholar]
- Yuan, K.; Guo, S.; Liu, Z.; Zhou, A.; Yu, F.; Wu, W. Incorporating convolution designs into visual transformers. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, BC, Canada, 11–17 October 2021; pp. 579–588. [Google Scholar]
- Cohen, T.; Welling, M. Group equivariant convolutional networks. In Proceedings of the International Conference on Machine Learning, New York, NY, USA, 19–24 June 2016; pp. 2990–2999. [Google Scholar]
- Fetanat, G.; Homaifar, A.; Knapp, K.R. Objective tropical cyclone intensity estimation using analogs of spatial features in satellite data. Weather Forecast. 2013, 28, 1446–1459. [Google Scholar] [CrossRef]
- Liu, C.C.; Liu, C.Y.; Lin, T.H.; Chen, L.D. A satellite-derived typhoon intensity index using a deviation angle technique. Int. J. Remote Sens. 2015, 36, 1216–1234. [Google Scholar] [CrossRef]
- Zhang, C.J.; Wang, X.J.; Ma, L.M.; Lu, X.Q. Tropical cyclone intensity classification and estimation using infrared satellite images with deep learning. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 2070–2086. [Google Scholar] [CrossRef]
- Velden, C.S.; Herndon, D. A consensus approach for estimating tropical cyclone intensity from meteorological satellites: SATCON. Weather Forecast. 2020, 35, 1645–1662. [Google Scholar] [CrossRef]
- Zhang, C.J.; Luo, Q.; Dai, L.J.; Ma, L.M.; Lu, X.Q. Intensity estimation of tropical cyclones using the relevance vector machine from infrared satellite image data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 763–773. [Google Scholar] [CrossRef]
- Chen, B.F.; Chen, B.; Lin, H.T.; Elsberry, R.L. Estimating tropical cyclone intensity by satellite imagery utilizing convolutional neural networks. Weather Forecast. 2019, 34, 447–465. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Channel | Wavelength | Temporal Resolution (h) | Spatial Resolution (°) | Sorce | Temporal Coverage |
|---|---|---|---|---|---|
| IR | 11 μm | 3 | 0.07 | GridSat | 2003–2017 |
| WV | 6.7 μm | 3 | 0.07 | GridSat | 2003–2017 |
| VIS | 0.6 μm | 3 | 0.07 | GridSat | 2003–2017 |
| PMW | 85 Ghz | 3 | 0.25 | CMORPH | 2003–2017 |
| Category | Symbol | Wind Speed (kt) |
|---|---|---|
| No Category | NC | ≤20 |
| Tropical depression | TD | 21–33 |
| Tropical storm | TS | 34–63 |
| One | H1 | 64–82 |
| Two | H2 | 83–95 |
| Three | H3 | 96–112 |
| Four | H4 | 113–136 |
| Five | H5 | ≥137 |
| DataSet | Frame | Years | Basins |
|---|---|---|---|
| Training | 58,447 | 2003–2014, 2016 | Global |
| Validation | 6495 | 2003–2014, 2016 | Global |
| Testing | 10,118 | 2015, 2017 | Global |
| Reconnaissance assistance | 482 | 2017 | East Pacific, Atlantic |
| Model | Convolution Layers | Heads | LRCL | ||||||
|---|---|---|---|---|---|---|---|---|---|
| REConv1 | REConv2 | REConv3 | Maxpool | Channels | Encoder Blocks | e | k | ||
| TCICVIT | K3s2 | K3s2 | K3s2 | K3s2 | 32 | 8 | 3 | 4 | 3 |
| Model | Module | Input Channel | RMSE (kt) | (%) |
|---|---|---|---|---|
| M1 | TCICVit (Baseline) | IR | 9.14 | - |
| M2 | +REConv | IR | 8.92 | 2.41 |
| M3 | +REConv/SST | IR | 8.66 | 5.25 |
| M4 | +REConv/R35 | IR | 8.81 | 3.61 |
| M5 | +REConv/Center position | IR | 8.84 | 3.28 |
| M6 | +REConv/Center position/R35 | IR | 8.79 | 3.83 |
| M7 | +REConv/Center position/SST | IR | 8.63 | 5.58 |
| M8 | +REConv/R35/SST | IR | 8.60 | 5.91 |
| M9 | +REConv/R35 /SST/Center position | IR | 8.43 | 7.77 |
| Model | Module | Input Channel | RMSE (kt) | (%) |
|---|---|---|---|---|
| M1 | TCICVit (Baseline) | IR, PMW | 8.93 | - |
| M2 | +REConv | IR, PMW | 8.79 | 1.57 |
| M3 | +REConv/SST | IR, PMW | 8.52 | 4.59 |
| M4 | +REConv/R35 | IR, PMW | 8.64 | 3.25 |
| M5 | +REConv/Center position | IR, PMW | 8.69 | 2.69 |
| M6 | +REConv/Center position/R35 | IR, PMW | 8.72 | 2.35 |
| M7 | +REConv/Center position/SST | IR, PMW | 8.59 | 3.91 |
| M8 | +REConv/R35/SST | IR, PMW | 8.57 | 4.03 |
| M9 | +REConv/R35 /SST/Center position | IR, PMW | 8.21 | 8.06 |
| Model | Module | Input Channel | RMSE (kt) | (%) |
|---|---|---|---|---|
| M1 | TCICVit (Baseline) | IR, PMW, WV | 9.02 | - |
| M2 | +REConv | IR, PMW, WV | 8.83 | 2.11 |
| M3 | +REConv/SST | IR, PMW, WV | 8.61 | 4.55 |
| M4 | +REConv/R35 | IR, PMW, WV | 8.75 | 2.99 |
| M5 | +REConv/Center position | IR, PMW, WV | 8.78 | 2.66 |
| M6 | +REConv/Center position/R35 | IR, PMW, WV | 8.73 | 3.22 |
| M7 | +REConv/Center position/SST | IR, PMW, WV | 8.49 | 5.88 |
| M8 | +REConv/R35/SST | IR, PMW, WV | 8.51 | 5.65 |
| M9 | +REConv/R35 /SST/Center position | IR, PMW, WV | 8.19 | 9.20 |
| Category | All Samples | RMSE (kt) | Bias (kt) | Std (kt) |
|---|---|---|---|---|
| NC | 704 | 8.61 | 6.89 | 3.43 |
| TD | 2621 | 4.63 | 1.36 | 4.43 |
| TS | 3952 | 6.61 | −2.54 | 2.23 |
| H1 | 1147 | 8.94 | −2.09 | 5.72 |
| H2 | 679 | 9.15 | −1.35 | 5.84 |
| H3 | 465 | 9.30 | −1.14 | 6.13 |
| H4 | 455 | 9.46 | −1.96 | 6.26 |
| H5 | 95 | 9.91 | −6.09 | 7.70 |
| Models | Data | Year | RMSE |
|---|---|---|---|
| DeepMicroNet [12] | MINT | 2007, 2012 | 10.60 |
| FASI [32] | IR | 1989–2004 | 12.70 |
| Y. Zhao [3] | IR | 2008, 2009 | 12.01 |
| TI index [33] | IR | 2011 | 9.34 |
| CNN(VGG19) [14] | IR | 2015 | 10.49 |
| Deep CNN [11] | IR | 1999–2014 | 10.18 |
| Improved DAV-T [26] | IR | 2007 | 12.70 |
| CNN classification and regression [34] | IR | 2017–2019 | 9.59 |
| TCICVIT | IR | 2015, 2017 | 8.43 |
| ADT (smooth)[25] | IR, VIS, PMW | 2018 | 11.79 |
| SATCON (smooth) [35] | ADT, AMSU, SSMIS, ATMS | 2017 | 9.21 |
| TCIENet model [36] | IR, WV | 2017 | 9.98 |
| CNN-TC (nosmoothed) [37] | IR, PMW | 2015–2016 | 10.38 |
| CNN-TC (nosmoothed) [37] | IR, PMW | 2015–2016 | 8.39 |
| TCICVIT | IR, PMW | 2015, 2017 | 8.21 |
| TCICVIT | IR, PMW, WV | 2015, 2017 | 8.19 |
| TCICVIT (reconnaissance assistance) | IR, PMW, WV | 2017 | 7.88 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tian, W.; Lai, L.; Niu, X.; Zhou, X.; Zhang, Y.; Kenny, L.K.S.T.C. Estimation of Tropical Cyclone Intensity Using Multi-Platform Remote Sensing and Deep Learning with Environmental Field Information. Remote Sens. 2023, 15, 2085. https://doi.org/10.3390/rs15082085
Tian W, Lai L, Niu X, Zhou X, Zhang Y, Kenny LKSTC. Estimation of Tropical Cyclone Intensity Using Multi-Platform Remote Sensing and Deep Learning with Environmental Field Information. Remote Sensing. 2023; 15(8):2085. https://doi.org/10.3390/rs15082085
Chicago/Turabian StyleTian, Wei, Linhong Lai, Xianghua Niu, Xinxin Zhou, Yonghong Zhang, and Lim Kam Sian Thiam Choy Kenny. 2023. "Estimation of Tropical Cyclone Intensity Using Multi-Platform Remote Sensing and Deep Learning with Environmental Field Information" Remote Sensing 15, no. 8: 2085. https://doi.org/10.3390/rs15082085
APA StyleTian, W., Lai, L., Niu, X., Zhou, X., Zhang, Y., & Kenny, L. K. S. T. C. (2023). Estimation of Tropical Cyclone Intensity Using Multi-Platform Remote Sensing and Deep Learning with Environmental Field Information. Remote Sensing, 15(8), 2085. https://doi.org/10.3390/rs15082085