
Quantitative Evaluation of Maize Emergence Using UAV Imagery and Deep Learning


Abstract
1. Introduction
2. Materials and Methods
2.1. Study Sites
2.2. UAV Data Collection
2.3. Image Pre-Processing
2.4. Evaluation for Maize Emergence
2.4.1. Model Training Data Creation and Model Verification Data Collection
2.4.2. Model Training
2.4.3. Model Prediction
2.4.4. Calculation for Parameters of Seedling Growth and Distribution of Maize
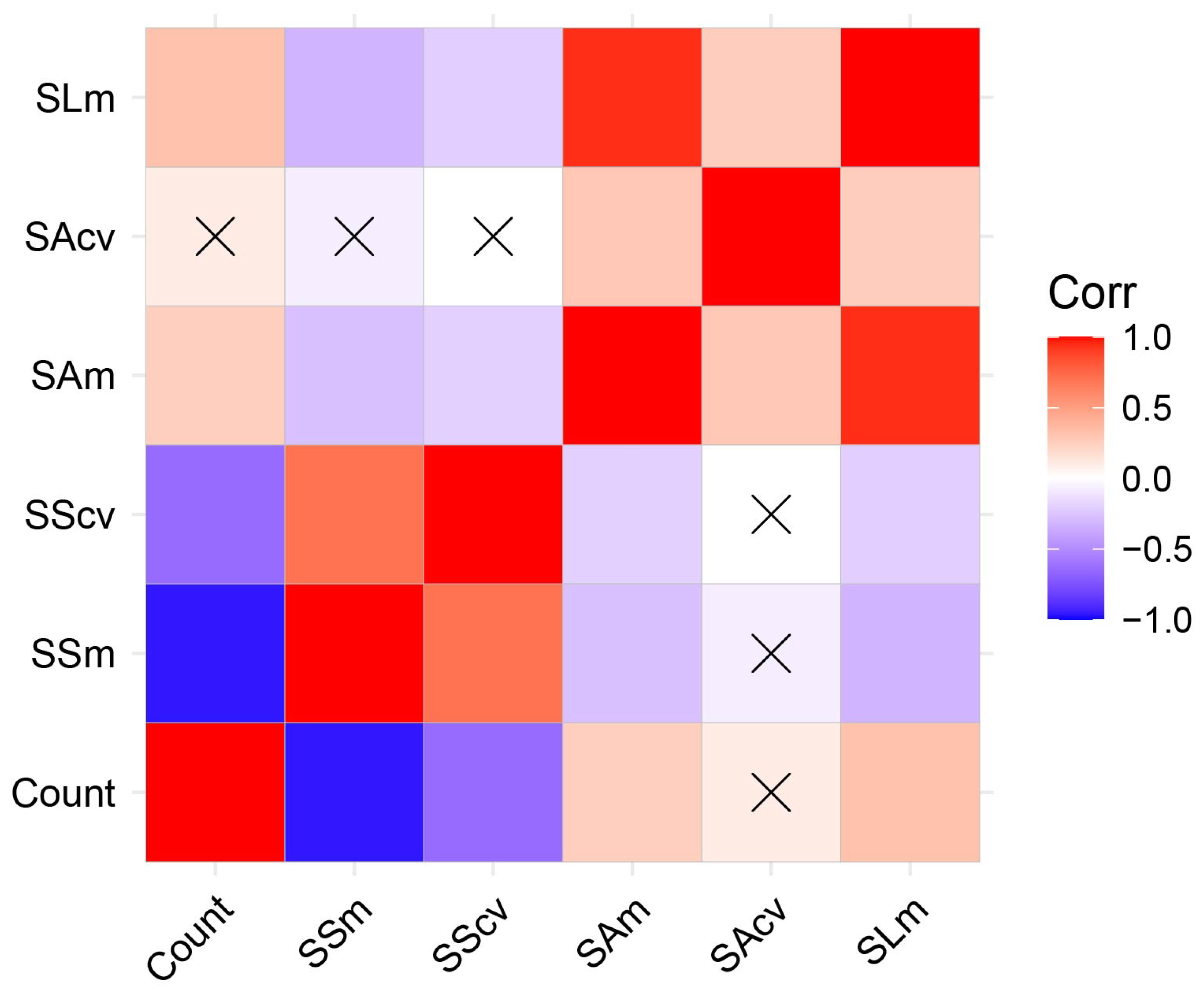
2.5. Statistical Analysis
3. Results
3.1. Quantitative Maize Emergence
3.2. Evaluation of Seedling Measurement System for Predicting the Seedling Count of Maize
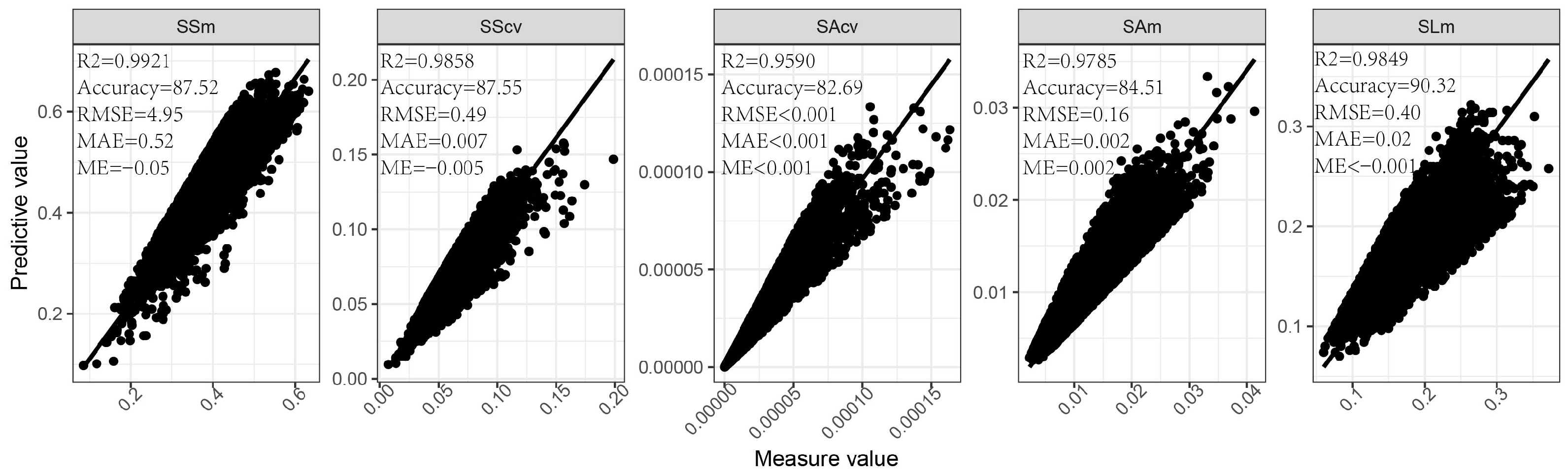
3.3. Evaluation of the Seedling Measurement System on Prediction of Maize Seedling Distribution
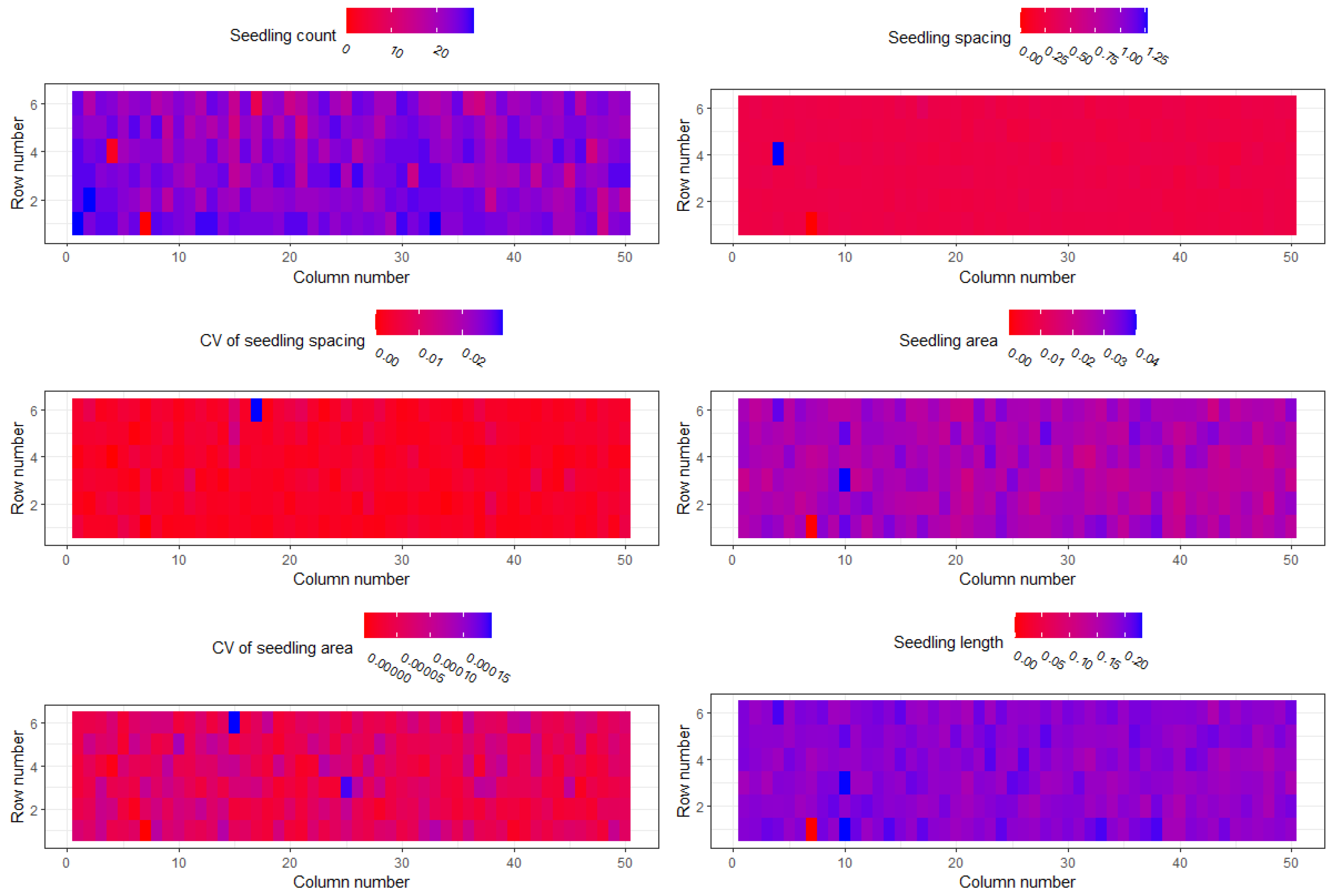
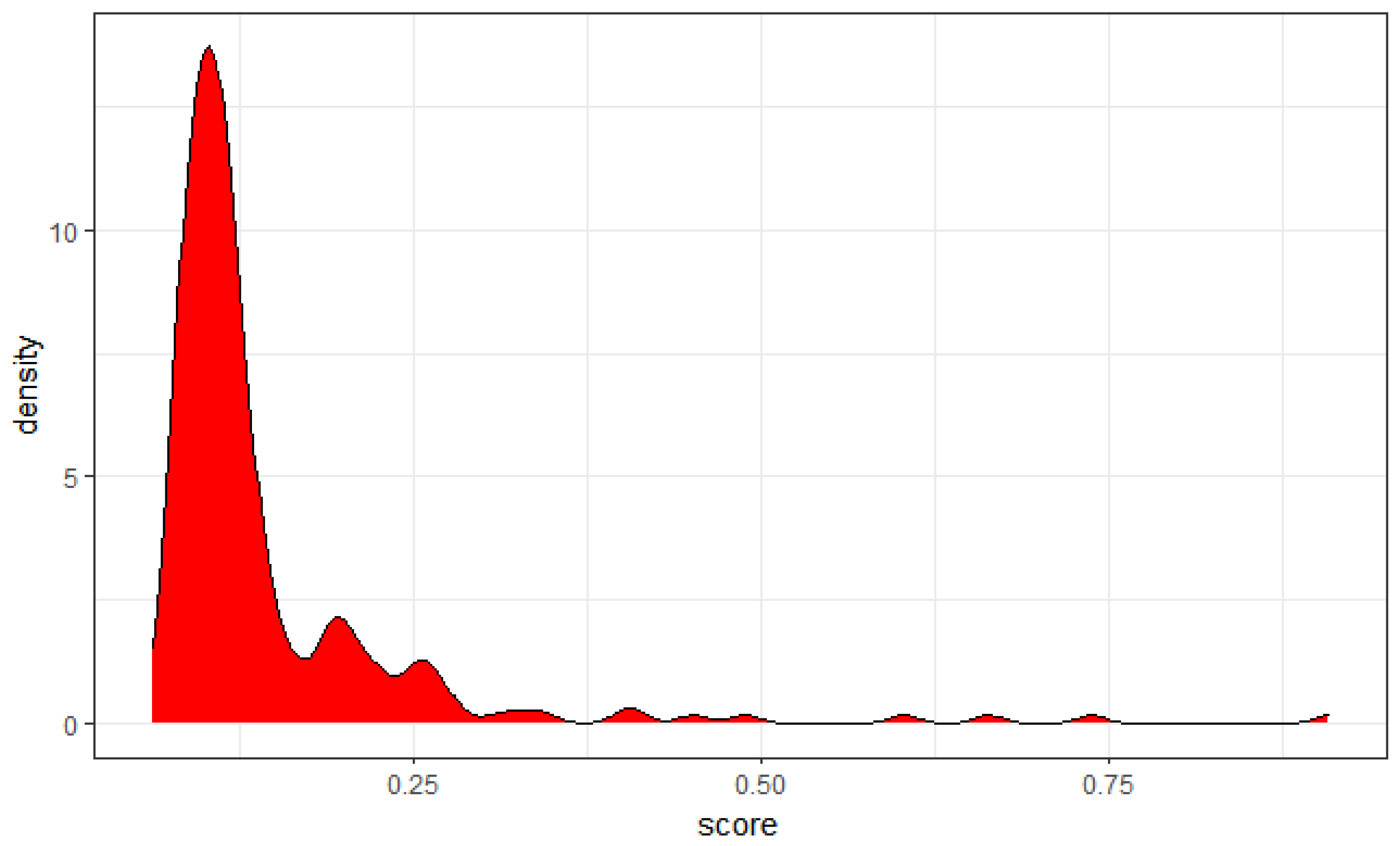
3.4. Application of the Seedling Measurement System
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Searchinger, T.; Waite, R.; Hanson, C.; Ranganathan, J.; Dumas, P.; Matthews, E.; Klirs, C. Creating a Sustainable Food Future: A Menu of Solutions to Feed Nearly 10 Billion People by 2050. Final Report; World Resources Institute: Washington, DC, USA, 2019. [Google Scholar]
- FAO. The State of Food and Agriculture: Climate Change, Agriculture and Food Security; Food and Agriculture Organization of the United Nations: Rome, Italy, 2016. [Google Scholar]
- Shirzadifar, A.; Maharlooei, M.; Bajwa, S.G.; Oduor, P.G.; Nowatzki, J.F. Mapping Crop Stand Count and Planting Uniformity Using High Resolution Imagery in a Maize Crop. Biosyst. Eng. 2020, 200, 377–390. [Google Scholar] [CrossRef]
- Bai, Y.; Nie, C.; Wang, H.; Cheng, M.; Liu, S.; Yu, X.; Shao, M.; Wang, Z.; Wang, S.; Tuohuti, N.; et al. A Fast and Robust Method for Plant Count in Sunflower and Maize at Different Seedling Stages Using High-Resolution UAV RGB Imagery. Precis. Agric. 2022, 23, 1720–1742. [Google Scholar] [CrossRef]
- Karayel, D.; Özmerzi, A. Evaluation of Three Depth-Control Components on Seed Placement Accuracy and Emergence for a Precision Planter. Appl. Eng. Agric. 2008, 24, 271–276. [Google Scholar] [CrossRef]
- Liu, T.; Li, R.; Jin, X.; Ding, J.; Zhu, X.; Sun, C.; Guo, W. Evaluation of Seed Emergence Uniformity of Mechanically Sown Wheat with UAV RGB Imagery. Remote Sens. 2017, 9, 1241. [Google Scholar] [CrossRef]
- Egli, D. Relationship of Uniformity of Soybean Seedling Emergence to Yield. J. Seed Technol. 1993, 17, 22–28. [Google Scholar]
- Ranum, P.; Peña-Rosas, J.P.; Garcia-Casal, M.N. Global Maize Production, Utilization, and Consumption. Ann. N. Y. Acad. Sci. 2014, 1312, 105–112. [Google Scholar] [CrossRef]
- Liu, S.; Baret, F.; Allard, D.; Jin, X.; Andrieu, B.; Burger, P.; Hemmerlé, M.; Comar, A. A Method to Estimate Plant Density and Plant Spacing Heterogeneity: Application to Wheat Crops. Plant Methods 2017, 13, 38. [Google Scholar] [CrossRef]
- Liu, Y.; Bachofen, C.; Wittwer, R.; Duarte, G.S.; Sun, Q.; Klaus, V.H.; Buchmann, N. Using PhenoCams to Track Crop Phenology and Explain the Effects of Different Cropping Systems on Yield. Agric. Syst. 2022, 195, 103306. [Google Scholar] [CrossRef]
- Aasen, H.; Kirchgessner, N.; Walter, A.; Liebisch, F. PhenoCams for Field Phenotyping: Using Very High Temporal Resolution Digital Repeated Photography to Investigate Interactions of Growth, Phenology, and Harvest Traits. Front. Plant Sci. 2020, 11, 593. [Google Scholar] [CrossRef]
- Jin, X.; Liu, S.; Baret, F.; Hemerlé, M.; Comar, A. Estimates of Plant Density of Wheat Crops at Emergence from Very Low Altitude UAV Imagery. Remote Sens. Environ. 2017, 198, 105–114. [Google Scholar] [CrossRef]
- Maertens, K.; Reyns, P.; De Clippel, J.; De Baerdemaeker, J. First Experiments on Ultrasonic Crop Density Measurement. J. Sound Vib. 2003, 266, 655–665. [Google Scholar] [CrossRef]
- Shi, Y.; Wang, N.; Taylor, R.; Raun, W. Improvement of a Ground-LiDAR-Based Corn Plant Population and Spacing Measurement System. Comput. Electron. Agric. 2015, 112, 92–101. [Google Scholar] [CrossRef]
- Bai, J.; Li, J.; Li, S. Monitoring the Plant Density of Cotton with Remotely Sensed Data. In Proceedings of the International Conference on Computer and Computing Technologies in Agriculture; Springer: Berlin/Heidelberg, Germany, 2010; pp. 90–101. [Google Scholar]
- Ren, H.; Zhao, Y.; Xiao, W.; Hu, Z. A Review of UAV Monitoring in Mining Areas: Current Status and Future Perspectives. Int. J. Coal Sci. Technol. 2019, 6, 320–333. [Google Scholar] [CrossRef]
- Yang, Q.; Shi, L.; Han, J.; Yu, J.; Huang, K. A near Real-Time Deep Learning Approach for Detecting Rice Phenology Based on UAV Images. Agric. For. Meteorol. 2020, 287, 107938. [Google Scholar] [CrossRef]
- Zhou, M.; Zheng, H.; He, C.; Liu, P.; Awan, G.M.; Wang, X.; Cheng, T.; Zhu, Y.; Cao, W.; Yao, X. Wheat Phenology Detection with the Methodology of Classification Based on the Time-Series UAV Images. Field Crops Res. 2023, 292, 108798. [Google Scholar] [CrossRef]
- Feng, A.; Zhou, J.; Vories, E.; Sudduth, K.A. Evaluation of Cotton Emergence Using UAV-Based Imagery and Deep Learning. Comput. Electron. Agric. 2020, 177, 105711. [Google Scholar] [CrossRef]
- Che, Y.; Wang, Q.; Zhou, L.; Wang, X.; Li, B.; Ma, Y. The Effect of Growth Stage and Plant Counting Accuracy of Maize Inbred Lines on LAI and Biomass Prediction. Precis. Agric. 2022, 23, 2159–2185. [Google Scholar] [CrossRef]
- Liu, T.; Wu, W.; Chen, W.; Sun, C.; Zhu, X.; Guo, W. Automated Image-Processing for Counting Seedlings in a Wheat Field. Precis. Agric. 2016, 17, 392–406. [Google Scholar] [CrossRef]
- Feng, A.; Zhou, J.; Vories, E.; Sudduth, K.A. Evaluation of Cotton Emergence Using UAV-Based Narrow-Band Spectral Imagery with Customized Image Alignment and Stitching Algorithms. Remote Sens. 2020, 12, 1764. [Google Scholar] [CrossRef]
- Vong, C.N.; Conway, L.S.; Feng, A.; Zhou, J.; Kitchen, N.R.; Sudduth, K.A. Corn Emergence Uniformity Estimation and Mapping Using UAV Imagery and Deep Learning. Comput. Electron. Agric. 2022, 198, 107008. [Google Scholar] [CrossRef]
- Forcella, F.; Arnold, R.L.B.; Sanchez, R.; Ghersa, C.M. Modeling Seedling Emergence. Field Crops Res. 2000, 67, 123–139. [Google Scholar] [CrossRef]
- Egli, D.; Rucker, M. Seed Vigor and the Uniformity of Emergence of Corn Seedlings. Crop Sci. 2012, 52, 2774–2782. [Google Scholar] [CrossRef]
- Li, B.; Xu, X.; Han, J.; Zhang, L.; Bian, C.; Jin, L.; Liu, J. The Estimation of Crop Emergence in Potatoes by UAV RGB Imagery. Plant Methods 2019, 15, 15. [Google Scholar] [CrossRef]
- Banerjee, B.P.; Sharma, V.; Spangenberg, G.; Kant, S. Machine Learning Regression Analysis for Estimation of Crop Emergence Using Multispectral UAV Imagery. Remote Sens. 2021, 13, 2918. [Google Scholar] [CrossRef]
- Liu, S.; Yin, D.; Feng, H.; Li, Z.; Xu, X.; Shi, L.; Jin, X. Estimating Maize Seedling Number with UAV RGB Images and Advanced Image Processing Methods. Precis. Agric. 2022, 23, 1604–1632. [Google Scholar] [CrossRef]
- Valente, J.; Sari, B.; Kooistra, L.; Kramer, H.; Mücher, S. Automated Crop Plant Counting from Very High-Resolution Aerial Imagery. Precis. Agric. 2020, 21, 1366–1384. [Google Scholar] [CrossRef]
- Kamilaris, A.; Prenafeta-Boldú, F.X. Deep Learning in Agriculture: A Survey. Comput. Electron. Agric. 2018, 147, 70–90. [Google Scholar] [CrossRef]
- Perugachi-Diaz, Y.; Tomczak, J.M.; Bhulai, S. Deep Learning for White Cabbage Seedling Prediction. Comput. Electron. Agric. 2021, 184, 106059. [Google Scholar] [CrossRef]
- Lin, Y.; Chen, T.; Liu, S.; Cai, Y.; Shi, H.; Zheng, D.; Lan, Y.; Yue, X.; Zhang, L. Quick and Accurate Monitoring Peanut Seedlings Emergence Rate through UAV Video and Deep Learning. Comput. Electron. Agric. 2022, 197, 106938. [Google Scholar] [CrossRef]
- Pix4D SA. Pix4Dmapper. Available online: https://www.pix4d.com/product/pix4dmapper-photogrammetry-software (accessed on 15 November 2021).
- Adobe Photoshop, Adobe. Available online: https://www.adobe.com/products/photoshop.html (accessed on 20 April 2019).
- Lin, T. LabelImg. 2015. Available online: https://github.com/heartexlabs/labelImg (accessed on 13 September 2022).
- Huang, Y.Q.; Zheng, J.C.; Sun, S.D.; Yang, C.F.; Liu, J. Optimized YOLOv3 Algorithm and Its Application in Traffic Flow Detections. Appl. Sci. 2020, 10, 3079. [Google Scholar] [CrossRef]
- Koonce, B.; Koonce, B. ResNet 50. In Convolutional Neural Networks with Swift for Tensorflow: Image Recognition and Dataset Categorization; APress: New York, NY, USA, 2021; pp. 63–72. [Google Scholar]
- Barhoom, A.M.; Al-Hiealy, M.R.J.; Abu-Naser, S.S. Bone Abnormalities Detection and Classification Using Deep Learning-Vgg16 Algorithm. J. Theor. Appl. Inf. Technol. 2022, 100, 6173–6184. [Google Scholar]
- YOLO-V5. Available online: https://github.com/ultralytics/yolov5 (accessed on 13 August 2020).
- Redmon, J.; Farhadi, A. Yolov3: An Incremental Improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Yazdi, M.M. Topsis: TOPSIS Method for Multiple-Criteria Decision Making (MCDM). 2013. Available online: https://cran.r-project.org/web/packages/topsis/ (accessed on 6 October 2022).
- Olson, D.L. Comparison of Weights in TOPSIS Models. Math. Comput. Model. 2004, 40, 721–727. [Google Scholar] [CrossRef]
- Sansone, C.; Isakeit, T.; Lemon, R.; Warrick, B. Texas Cotton Production: Emphasizing Integrated Pest Management; TCE Magazine: College Station, TX, USA, 2002. [Google Scholar]
- Sun, C.; Bian, Y.; Zhou, T.; Pan, J. Using of Multi-Source and Multi-Temporal Remote Sensing Data Improves Crop-Type Mapping in the Subtropical Agriculture Region. Sensors 2019, 19, 2401. [Google Scholar] [CrossRef]
- Jiang, Y.; Li, C.; Paterson, A.H.; Robertson, J.S. DeepSeedling: Deep Convolutional Network and Kalman Filter for Plant Seedling Detection and Counting in the Field. Plant Methods 2019, 15, 141. [Google Scholar] [CrossRef]
- Wu, W.; Liu, T.; Zhou, P.; Yang, T.; Li, C.; Zhong, X.; Sun, C.; Liu, S.; Guo, W. Image Analysis-Based Recognition and Quantification of Grain Number per Panicle in Rice. Plant Methods 2019, 15, 122. [Google Scholar] [CrossRef]
- Barreto, A.; Lottes, P.; Yamati, F.R.I.; Baumgarten, S.; Wolf, N.A.; Stachniss, C.; Mahlein, A.-K.; Paulus, S. Automatic UAV-Based Counting of Seedlings in Sugar-Beet Field and Extension to Maize and Strawberry. Comput. Electron. Agric. 2021, 191, 106493. [Google Scholar] [CrossRef]
- Al-Naggar, A.; Soliman, A.; Hussien, M.; Mohamed, A. Genetic Diversity of Maize Inbred Lines Based on Morphological Traits and Its Association with Heterosis. SABRAO J. Breed. Genet. 2022, 54, 589–597. [Google Scholar] [CrossRef]
- Liu, S.; Baret, F.; Andrieu, B.; Burger, P.; Hemmerlé, M. Estimation of Wheat Plant Density at Early Stages Using High Resolution Imagery. Front. Plant Sci. 2017, 8, 739. [Google Scholar]
- Zhang, Y.; Wang, R.; Wang, S.; Ning, F.; Wang, H.; Wen, P.; Li, A.; Dong, Z.; Xu, Z.; Zhang, Y.; et al. Effect of Planting Density on Deep Soil Water and Maize Yield on the Loess Plateau of China. Agric. Water Manag. 2019, 223, 105655. [Google Scholar] [CrossRef]
- Zhang, M.; Tao, C.; Latifmanesh, H.; Feng, X.; Cao, T.; Qian, C.; Deng, A.; Song, Z.; Zhang, W. How Plant Density Affects Maize Spike Differentiation, Kernel Set, and Grain Yield Formation in Northeast China? J. Integr. Agric. 2018, 17, 1745–1757. [Google Scholar] [CrossRef]
- Armalivia, S.; Zainuddin, Z.; Achmad, A.; Wicaksono, M.A. Automatic Counting Shrimp Larvae Based You Only Look Once (YOLO). In Proceedings of the 2021 International Conference on Artificial Intelligence and Mechatronics Systems (AIMS), Bandung, Indonesia, 28–30 April 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1–4. [Google Scholar]
- Gao, M.; Yang, F.; Wei, H.; Liu, X. Individual Maize Location and Height Estimation in Field from UAV-Borne LiDAR and RGB Images. Remote Sens. 2022, 14, 2292. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Year | 2021 | 2022 | ||||
|---|---|---|---|---|---|---|
| Station | Zhuozhou | Gongzhuling | Zhangye | Zhuozhou | Gongzhuling | Zhangye |
| Latitude | N39.5° | N43.5° | N38.8° | N39.5° | N43.5° | N38.8° |
| Longitude | E115.8° | E124.8° | E100.37° | E115.8° | E124.8° | E100.37° |
| Altitude (m) | 45 | 200 | 1548 | 45 | 200 | 1548 |
| Soil | Sandy loam | Chernozem | Irrigated desert soil | Sandy loam | Chernozem | Irrigated desert soil |
| Crop | Hybrid line | Transgenic line | Inbred line | Hybrid and inbred line | Hybrid and inbred line | Inbred line |
| Row spacing (m) | 0.6 | 0.6 | 0.6 | 0.6 | 0.6 | 0.6 |
| Plant spacing (m) | 0.206–0.37 | 0.25 | 0.25 | 0.206–0.37 | 0.206–0.37 | 0.25 |
| Number of plots | 217 | 641 | 301 | 771 | 1024 | 300 |
| Year | 2021 | 2022 | ||||
|---|---|---|---|---|---|---|
| Site | Zhuozhou | Gongzhuling | Zhangye | Zhuozhou | Gongzhuling | Zhangye |
| Stage | 4–5 leaves | 4 leaves | 5 leaves | 5 leaves | 5 leaves | 5 leaves |
| Date | 5/24 | 6/15 | 5/24 | 6/1 | 6/14 | 6/11 |
| UAV | MAVIC PRO2 | MAVIC PRO2 | MAVIC PRO1 | MAVIC PRO1 | MAVIC PRO2 | MAVIC PRO1 |
| Height above ground (m) | 20 | 20 | 15 | 15 | 20 | 15 |
| Stitching accuracy (RMS Error: x, y, z, %) | 0.50, 0.23, 0.37 | 0.56, 0.65, 1.43 | 0.70, 0.78, 0.76 | 0.44, 0.37, 0.37 | 0.38, 0.43, 1.10 | 0.16, 0.28, 0.27 |
| Year | Station | R2 | Accuracy | RMSE | ME | MAE |
|---|---|---|---|---|---|---|
| 2021 | Gongzhuling | 0.9937 | 92.00 | 28.82 | 1.14 | 1.15 |
| 2021 | Zhangye | 0.9641 | 83.93 | 32.50 | 1.88 | 3.20 |
| 2021 | Zhuozhou | 0.9984 | 96.99 | 11.50 | 0.78 | 0.88 |
| 2022 | Gongzhuling | 0.8897 | 77.76 | 120.19 | 3.77 | 3.81 |
| 2022 | Zhangye | 0.9358 | 43.96 | 214.02 | 12.36 | 12.36 |
| 2022 | Zhuozhou | 0.9753 | 89.00 | 68.52 | 2.53 | 2.57 |
| The Type | ID | Row | Col | Score | Rank |
|---|---|---|---|---|---|
| Top 10 plots | 4_34 | 4 | 34 | 0.907732 | 1 |
| 4_35 | 4 | 35 | 0.737265 | 2 | |
| 4_43 | 4 | 43 | 0.663084 | 3 | |
| 4_36 | 4 | 36 | 0.602543 | 4 | |
| 4_39 | 4 | 39 | 0.487979 | 5 | |
| 4_9 | 4 | 9 | 0.450847 | 6 | |
| 4_22 | 4 | 22 | 0.408759 | 7 | |
| 4_41 | 4 | 41 | 0.401846 | 8 | |
| 4_61 | 4 | 61 | 0.344274 | 9 | |
| 4_52 | 4 | 52 | 0.328818 | 10 | |
| The last 10 plots | 4_25 | 4 | 25 | 0.079492 | 207 |
| 2_73 | 2 | 73 | 0.078795 | 208 | |
| 2_6 | 2 | 6 | 0.078173 | 209 | |
| 3_30 | 3 | 30 | 0.077785 | 210 | |
| 4_6 | 4 | 6 | 0.077404 | 211 | |
| 2_44 | 2 | 44 | 0.07678 | 212 | |
| 3_49 | 3 | 49 | 0.075722 | 213 | |
| 3_74 | 3 | 74 | 0.075224 | 214 | |
| 4_63 | 4 | 63 | 0.071147 | 215 | |
| 4_47 | 4 | 47 | 0.061903 | 216 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, M.; Su, W.-H.; Wang, X.-Q. Quantitative Evaluation of Maize Emergence Using UAV Imagery and Deep Learning. Remote Sens. 2023, 15, 1979. https://doi.org/10.3390/rs15081979
Liu M, Su W-H, Wang X-Q. Quantitative Evaluation of Maize Emergence Using UAV Imagery and Deep Learning. Remote Sensing. 2023; 15(8):1979. https://doi.org/10.3390/rs15081979
Chicago/Turabian StyleLiu, Minguo, Wen-Hao Su, and Xi-Qing Wang. 2023. "Quantitative Evaluation of Maize Emergence Using UAV Imagery and Deep Learning" Remote Sensing 15, no. 8: 1979. https://doi.org/10.3390/rs15081979
APA StyleLiu, M., Su, W.-H., & Wang, X.-Q. (2023). Quantitative Evaluation of Maize Emergence Using UAV Imagery and Deep Learning. Remote Sensing, 15(8), 1979. https://doi.org/10.3390/rs15081979