
Terrain Self-Similarity-Based Transformer for Generating Super Resolution DEMs


Abstract
1. Introduction
2. Methodology
2.1. Self-Attention in Transformers
2.2. TTSR
2.3. Data Pre-Processing
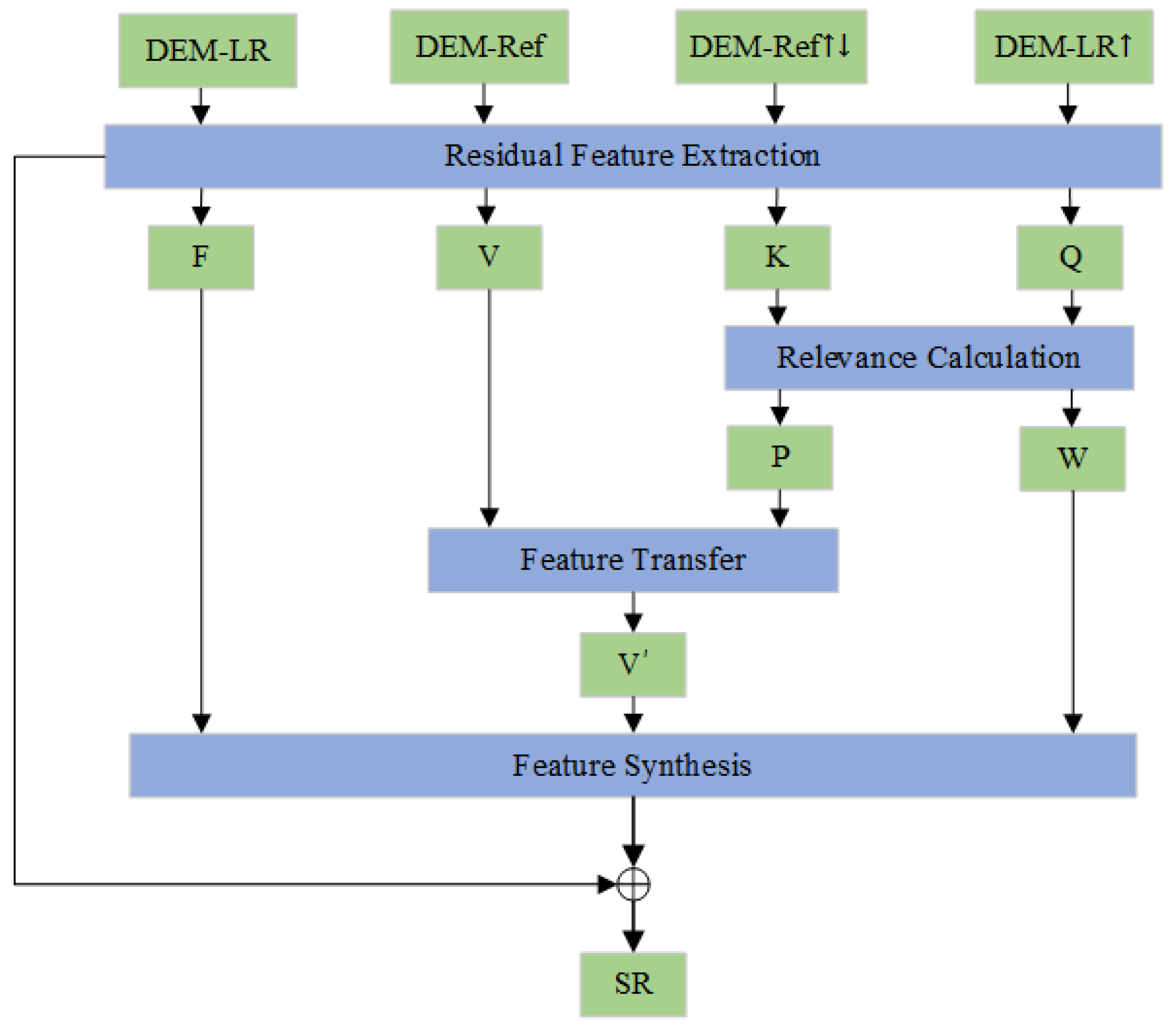
2.4. Model Architecture
2.4.1. Self-Similarity Transformer
2.4.2. Loss Function
2.4.3. Implementation Details
2.5. Evaluation Metrics
3. Experiments and Results
3.1. Data Descriptions
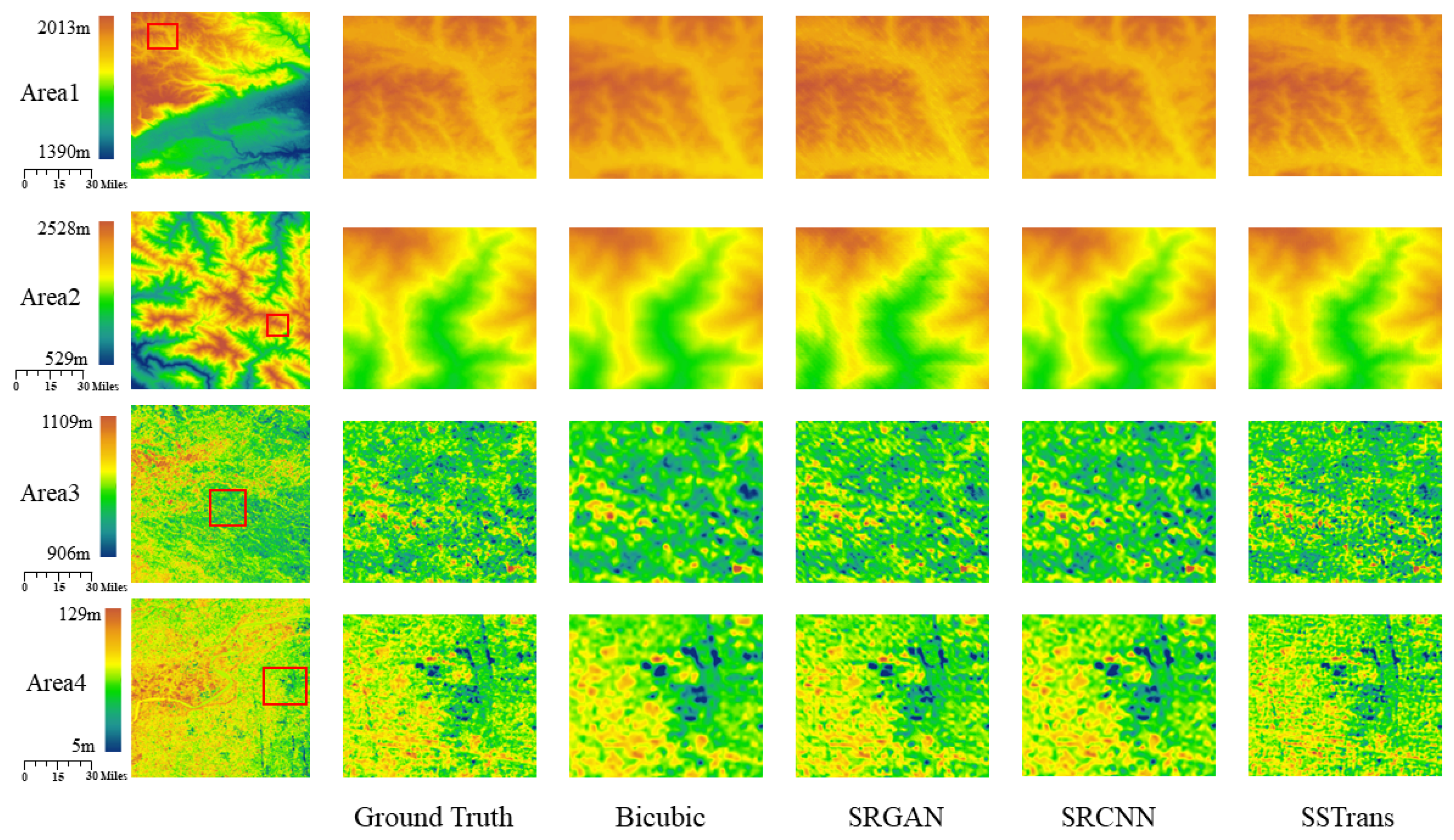
3.2. Results of the SR in Four Test Areas
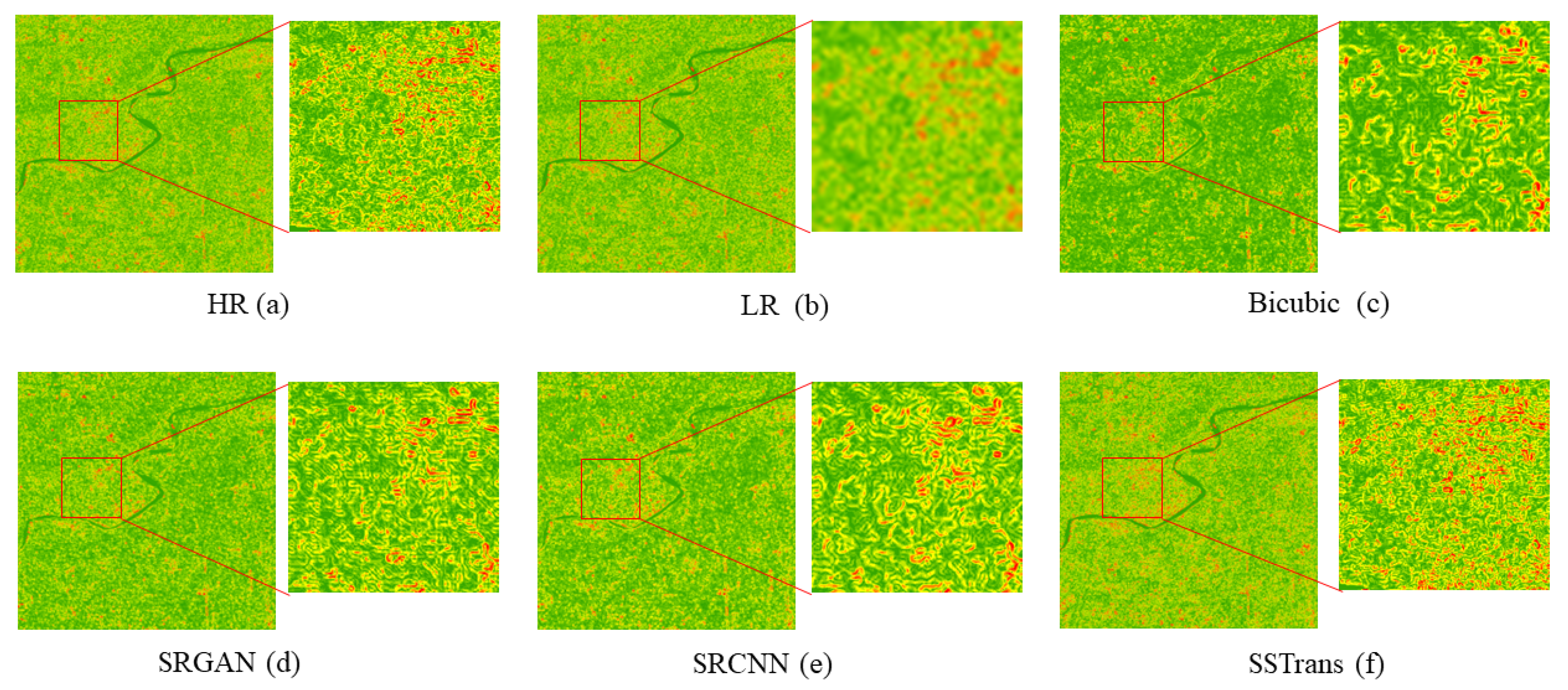
3.3. Comparison Analysis with Other SR Methods
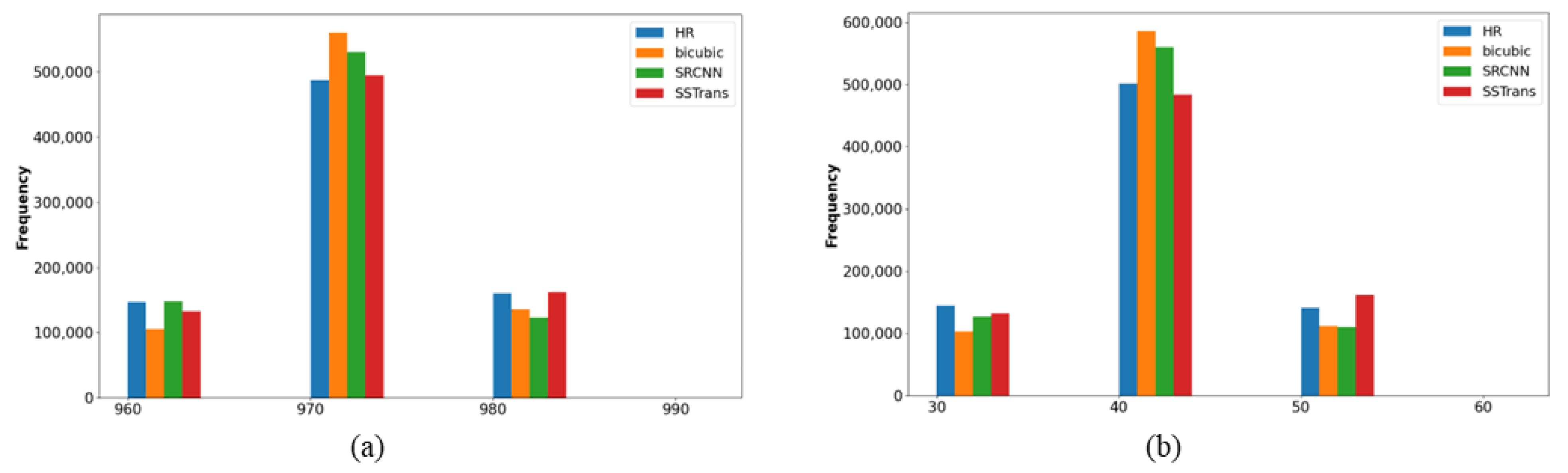
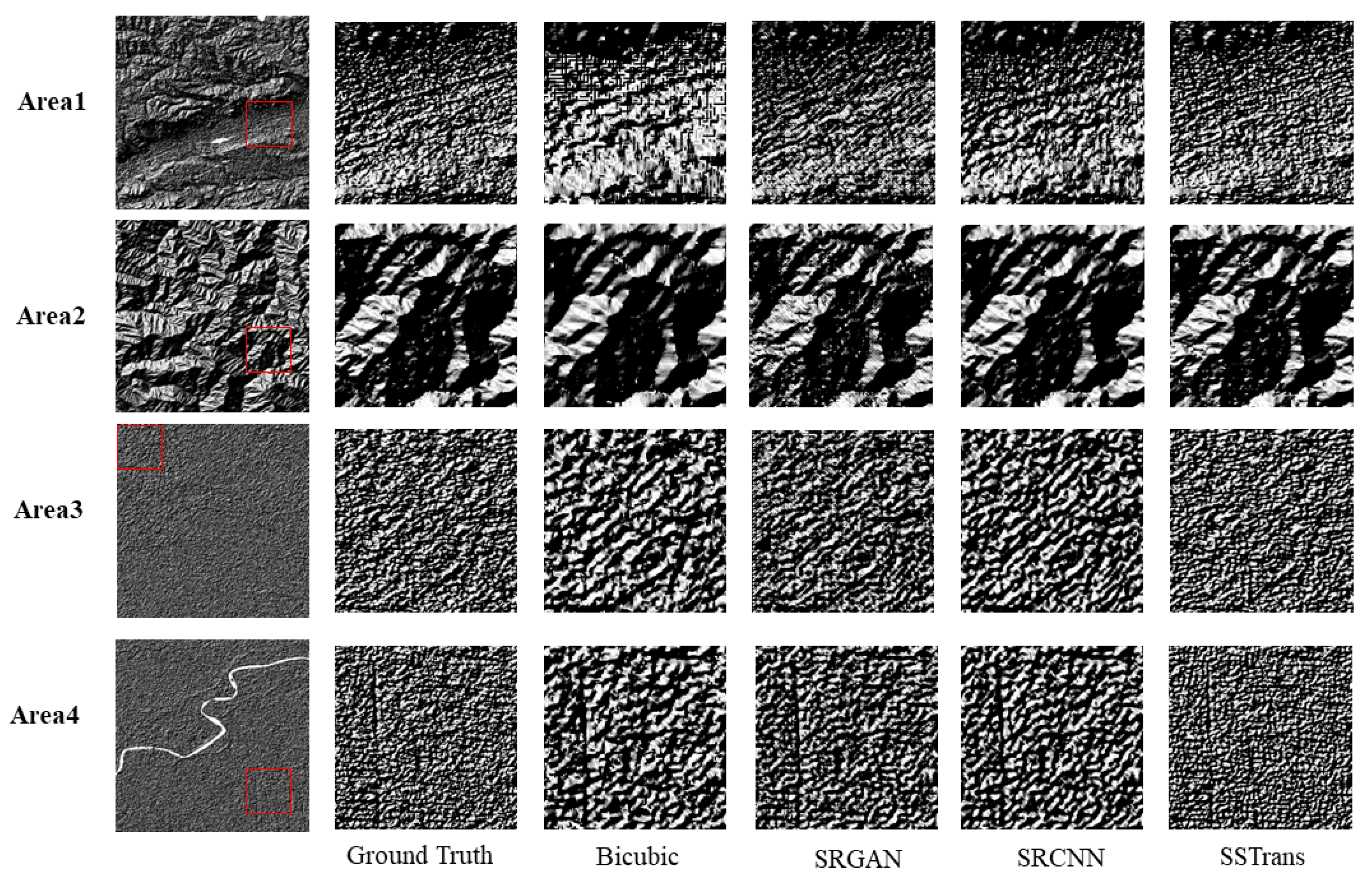
3.4. Terrain Parameters Maintenance
4. Conclusions
- We are one of the first to introduce the transformer method to DEM super-resolution (SR);
- We are one of the first to introduce the reference-based image super-resolution (RefSR) into DEM super-resolution (SR);
- To overcome the problem that the manual method of providing reference images is difficult to implement, we propose a method to automatically acquire high-resolution reference data for low-resolution DEM data using the self-similarity of terrain data.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Andreani, L.; Stanek, K.P.; Gloaguen, R.; Krentz, O.; Domínguez-González, L. DEM-based analysis of interactions between tectonics and landscapes in the Ore Mountains and Eger Rift (East Germany and NW Czech Republic). Remote Sens. 2014, 6, 7971–8001. [Google Scholar] [CrossRef]
- Wilson, J.P. Environmental Applications of Digital Terrain Modeling; John Wiley & Sons: New York, NY, USA, 2018. [Google Scholar]
- Simpson, A.L.; Balog, S.; Moller, D.K.; Strauss, B.H.; Saito, K. An urgent case for higher resolution digital elevation models in the world’s poorest and most vulnerable countries. Front. Earth Sci. 2015, 3, 50. [Google Scholar] [CrossRef]
- Vassilaki, D.I.; Stamos, A.A. TanDEM-X DEM: Comparative performance review employing LIDAR data and DSMs. ISPRS J. Photogramm. Remote Sens. 2020, 160, 33–50. [Google Scholar] [CrossRef]
- Liu, Z.; Han, L.; Yang, Z.; Cao, H.; Guo, F.; Guo, J.; Ji, Y. Evaluating the vertical accuracy of DEM generated from ZiYuan-3 stereo images in understanding the tectonic morphology of the Qianhe Basin, China. Remote Sens. 2021, 13, 1203. [Google Scholar] [CrossRef]
- De Almeida, G.A.; Bates, P.; Ozdemir, H. Modelling urban floods at submetre resolution: Challenges or opportunities for flood risk management? J. Flood Risk Manag. 2018, 11, S855–S865. [Google Scholar] [CrossRef]
- Toutin, T. Impact of terrain slope and aspect on radargrammetric DEM accuracy. ISPRS J. Photogramm. Remote Sens. 2002, 57, 228–240. [Google Scholar] [CrossRef]
- Liu, X. Airborne LiDAR for DEM generation: Some critical issues. Prog. Phys. Geogr. 2008, 32, 31–49. [Google Scholar]
- Shan, J.; Aparajithan, S. Urban DEM generation from raw LiDAR data. Photogramm. Eng. Remote Sens. 2005, 71, 217–226. [Google Scholar] [CrossRef]
- Yin, Q.; Chen, Z.; Zheng, X.; Xu, Y.; Liu, T. Sliding Windows Method based on terrain self-similarity for higher DEM resolution in flood simulating modeling. Remote Sens. 2021, 13, 3604. [Google Scholar] [CrossRef]
- Shepard, D. A two-dimensional interpolation function for irregularly-spaced data. In ACM ’68: Proceedings of the 1968 23rd ACM National Conference; ACM: New York, NY, USA, 1968; pp. 517–524. [Google Scholar]
- Chaplot, V.; Darboux, F.; Bourennane, H.; Leguédois, S.; Silvera, N.; Phachomphon, K. Accuracy of interpolation techniques for the derivation of digital elevation models in relation to landform types and data density. Geomorphology 2006, 77, 126–141. [Google Scholar] [CrossRef]
- Sibson, R. A brief description of natural neighbour interpolation. In Interpreting Multivariate Data; John Wiley & Sons: Hoboken, NJ, USA, 1981; pp. 21–36. [Google Scholar]
- Wang, B.; Shi, W.; Liu, E. Robust methods for assessing the accuracy of linear interpolated DEM. Int. J. Appl. Earth Obs. Geoinf. 2015, 34, 198–206. [Google Scholar] [CrossRef]
- Aguilar, F.J.; Agüera, F.; Aguilar, M.A.; Carvajal, F. Effects of terrain morphology, sampling density, and interpolation methods on grid DEM accuracy. Photogramm. Eng. Remote Sens. 2005, 71, 805–816. [Google Scholar] [CrossRef]
- Grohman, G.; Kroenung, G.; Strebeck, J. Filling SRTM voids: The delta surface fill method. Photogramm. Eng. Remote Sens. 2006, 72, 213–216. [Google Scholar]
- Shi, W.Z.; Li, Q.; Zhu, C. Estimating the propagation error of DEM from higher-order interpolation algorithms. Int. J. Remote Sens. 2005, 26, 3069–3084. [Google Scholar] [CrossRef]
- Li, X.; Shen, H.; Feng, R.; Li, J.; Zhang, L. DEM generation from contours and a low-resolution DEM. ISPRS J. Photogramm. Remote Sens. 2017, 134, 135–147. [Google Scholar] [CrossRef]
- Yue, L.; Shen, H.; Zhang, L.; Zheng, X.; Zhang, F.; Yuan, Q. High-quality seamless DEM generation blending SRTM-1, ASTER GDEM v2 and ICESat/GLAS observations. ISPRS J. Photogramm. Remote Sens. 2017, 123, 20–34. [Google Scholar] [CrossRef]
- Yue, L.; Shen, H.; Yuan, Q.; Zhang, L. Fusion of multi-scale DEMs using a regularized super-resolution method. Int. J. Geogr. Inf. Sci. 2015, 29, 2095–2120. [Google Scholar] [CrossRef]
- Zheng, X.; Xiong, H.; Yue, L.; Gong, J. An improved ANUDEM method combining topographic correction and DEM interpolation. Geocarto Int. 2016, 31, 492–505. [Google Scholar] [CrossRef]
- Xu, Z.; Chen, Z.; Yi, W.; Gui, Q.; Hou, W.; Ding, M. Deep gradient prior network for DEM super-resolution: Transfer learning from image to DEM. ISPRS J. Photogramm. Remote Sens. 2019, 150, 80–90. [Google Scholar] [CrossRef]
- Zhang, D.; Han, X.; Deng, C. Review on the research and practice of deep learning and reinforcement learning in smart grids. CSEE J. Power Energy Syst. 2018, 4, 362–370. [Google Scholar] [CrossRef]
- Dong, C.; Loy, C.C.; He, K.; Tang, X. Image super-resolution using deep convolutional networks. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 38, 295–307. [Google Scholar] [CrossRef] [PubMed]
- Chen, Z.; Wang, X.; Xu, Z. Convolutional neural network based dem super resolution. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 41. [Google Scholar]
- Demiray, B.Z.; Sit, M.; Demir, I. D-SRGAN: DEM super-resolution with generative adversarial networks. SN Comput. Sci. 2021, 2, 48. [Google Scholar] [CrossRef]
- Zhu, D.; Cheng, X.; Zhang, F.; Yao, X.; Gao, Y.; Liu, Y. Spatial interpolation using conditional generative adversarial neural networks. Int. J. Geogr. Inf. Sci. 2020, 34, 735–758. [Google Scholar] [CrossRef]
- Mirza, M.; Osindero, S. Conditional generative adversarial nets. arXiv 2014, arXiv:1411.1784. [Google Scholar]
- Yue, H.; Sun, X.; Yang, J.; Wu, F. Landmark image super-resolution by retrieving web images. IEEE Trans. Image Process. 2013, 22, 4865–4878. [Google Scholar]
- Zheng, H.; Ji, M.; Wang, H.; Liu, Y.; Fang, L. Crossnet: An end-to-end reference-based super resolution network using cross-scale warping. In Proceedings of the European Conference on Computer Vision (ECCV); Springer: Berlin, Germany, 2018; pp. 88–104. [Google Scholar]
- Yang, F.; Yang, H.; Fu, J.; Lu, H.; Guo, B. Learning texture transformer network for image super-resolution. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 5791–5800. [Google Scholar]
- Mandelbrot, B. How long is the coast of Britain? Statistical self-similarity and fractional dimension. Science 1967, 156, 636–638. [Google Scholar] [CrossRef]
- Goodchild, M.F.; Mark, D.M. The fractal nature of geographic phenomena. Ann. Assoc. Am. Geogr. 1987, 77, 265–278. [Google Scholar] [CrossRef]
- Lathrop, R.G.; Peterson, D.L. Identifying structural self-similarity in mountainous landscapes. Landsc. Ecol. 1992, 6, 233–238. [Google Scholar] [CrossRef]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, Ł.; Polosukhin, I. Attention is all you need. In Proceedings of the Advances in Neural Information Processing Systems 30 (NIPS 2017), Long Beach, CA, USA, 4–9 December 2017. [Google Scholar]
- Chen, H.; Wang, Y.; Guo, T.; Xu, C.; Deng, Y.; Liu, Z.; Ma, S.; Xu, C.; Xu, C.; Gao, W. Pre-trained image processing transformer. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 20–25 June 2021; pp. 12299–12310. [Google Scholar]
- Liang, J.; Cao, J.; Sun, G.; Zhang, K.; Van Gool, L.; Timofte, R. Swinir: Image restoration using swin transformer. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, QC, Canada, 10–17 October 2021; pp. 1833–1844. [Google Scholar]
- Isola, P.; Zhu, J.Y.; Zhou, T.; Efros, A.A. Image-to-image translation with conditional adversarial networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 1125–1134. [Google Scholar]
- Zhang, Z.; Song, Y.; Qi, H. Age progression/regression by conditional adversarial autoencoder. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 5810–5818. [Google Scholar]
- Gulrajani, I.; Ahmed, F.; Arjovsky, M.; Dumoulin, V.; Courville, A.C. Improved training of wasserstein gans. In Proceedings of the Advances in Neural Information Processing Systems 30 (NIPS 2017), Long Beach, CA, USA, 4–9 December 2017. [Google Scholar]
- Wang, Z.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Area | Maximum Elevation (m) | Minimum Elevation (m) | Maximum Elevation Difference (m) |
|---|---|---|---|
| Area 1 | 2206 | 1260 | 946 |
| Area 2 | 2528 | 190 | 2338 |
| Area 3 | 1109 | 906 | 203 |
| Area 4 | 129 | 5 | 124 |
| Area | MAE (m) | RMSE (m) | PSNR (dB) | SSIM |
|---|---|---|---|---|
| Area 1 | 4.44 | 5.65 | 34.09 | 98.93% |
| Area 2 | 12.96 | 16.52 | 23.77 | 99.04% |
| Area 3 | 1.55 | 2.03 | 41.99 | 96.13% |
| Area 4 | 1.63 | 2.14 | 41.51 | 94.11% |
| Area | Methods | MAE (m) | RMSE (m) | PSNR (dB) | SSIM |
|---|---|---|---|---|---|
| Area 1 | Bicubic | 6.12 | 7.30 | 30.47 | 97.31% |
| SRGAN | 6.17 | 8.15 | 29.90 | 96.09% | |
| SRCNN | 5.02 | 6.26 | 31.91 | 98.38% | |
| SSTrans | 4.44 | 5.65 | 33.06 | 98.93% | |
| Area 2 | Bicubic | 15.24 | 19.28 | 21.39 | 98.21% |
| SRGAN | 17.79 | 23.10 | 20.86 | 97.54% | |
| SRCNN | 14.86 | 18.20 | 22.02 | 98.85% | |
| SSTrans | 12.96 | 16.52 | 23.77 | 99.04% | |
| Area 3 | Bicubic | 2.46 | 3.18 | 38.08 | 86.32% |
| SRGAN | 2.10 | 2.78 | 39.22 | 87.71% | |
| SRCNN | 2.22 | 2.87 | 38.99 | 89.37% | |
| SSTrans | 1.55 | 2.03 | 41.99 | 96.13% | |
| Area 4 | Bicubic | 2.53 | 3.32 | 37.07 | 74.76% |
| SRGAN | 2.48 | 3.29 | 37.79 | 77.08% | |
| SRCNN | 2.40 | 3.17 | 38.10 | 78.35% | |
| SSTrans | 1.63 | 2.14 | 41.51 | 94.11% |
| Area | Terrain Parameters | Bicubic | SRGAN | SRCNN | SSTrans |
|---|---|---|---|---|---|
| Area 1 | 3.30 | 4.07 | 3.05 | 1.96 | |
| 68.11 | 75.39 | 63.97 | 39.78 | ||
| Area 2 | 5.28 | 7.66 | 5.17 | 4.04 | |
| 29.60 | 42.39 | 28.71 | 22.17 | ||
| Area 3 | 2.50 | 2.13 | 2.11 | 1.12 | |
| 84.41 | 86.05 | 79.25 | 33.29 | ||
| Area 4 | 2.93 | 2.42 | 2.52 | 1.64 | |
| 86.99 | 87.07 | 83.74 | 33.75 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, X.; Bao, Z.; Yin, Q. Terrain Self-Similarity-Based Transformer for Generating Super Resolution DEMs. Remote Sens. 2023, 15, 1954. https://doi.org/10.3390/rs15071954
Zheng X, Bao Z, Yin Q. Terrain Self-Similarity-Based Transformer for Generating Super Resolution DEMs. Remote Sensing. 2023; 15(7):1954. https://doi.org/10.3390/rs15071954
Chicago/Turabian StyleZheng, Xin, Zelun Bao, and Qian Yin. 2023. "Terrain Self-Similarity-Based Transformer for Generating Super Resolution DEMs" Remote Sensing 15, no. 7: 1954. https://doi.org/10.3390/rs15071954
APA StyleZheng, X., Bao, Z., & Yin, Q. (2023). Terrain Self-Similarity-Based Transformer for Generating Super Resolution DEMs. Remote Sensing, 15(7), 1954. https://doi.org/10.3390/rs15071954