
High-Resolution Mapping of Soil Organic Matter at the Field Scale Using UAV Hyperspectral Images with a Small Calibration Dataset


 ,
,  ,
,
Abstract
1. Introduction
2. Materials and Methods
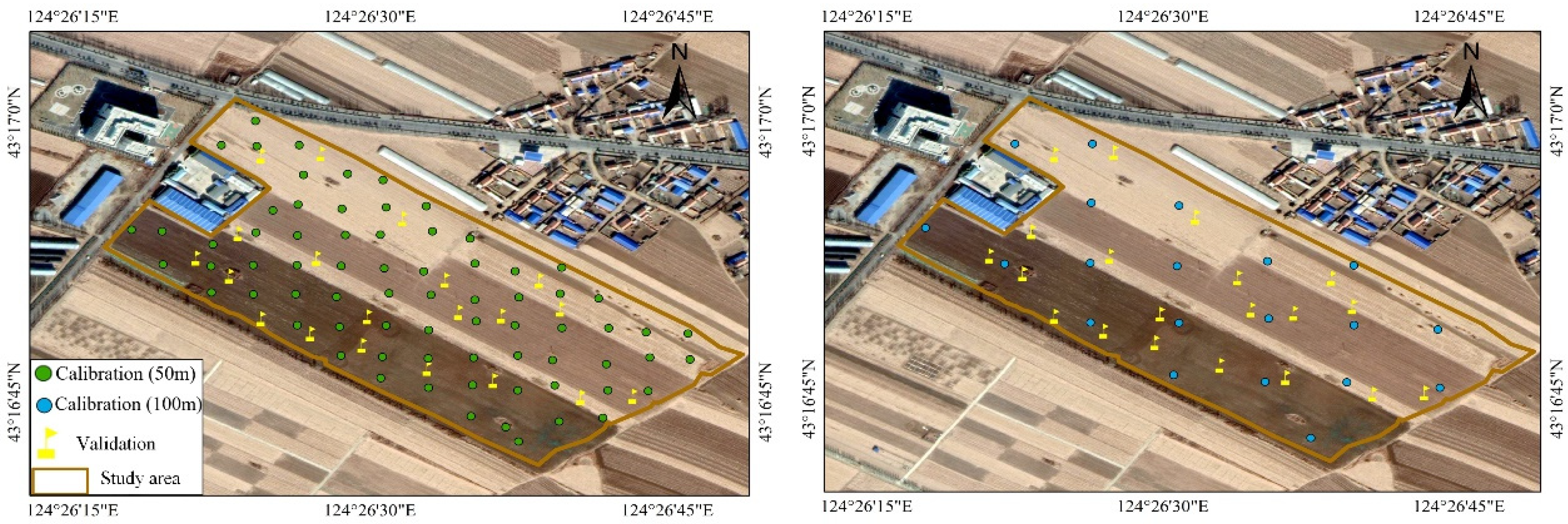
2.1. Study Sites and Experimental Design
2.2. Hyperspectroscopy Data
2.2.1. UAV Hyperspectroscopy-Based Image Acquisition
2.2.2. UAV Hyperspectral Image Processing
Image Processing
Soil Spectral Extraction
2.2.3. Visible Near-Infrared (NIR) Spectra Acquisition
2.2.4. Spectral Preprocessing
2.3. SOM Mapping Using Random Forest (RF) and Hyperspectroscopy Data
2.4. Reference DSM Method for Comparison
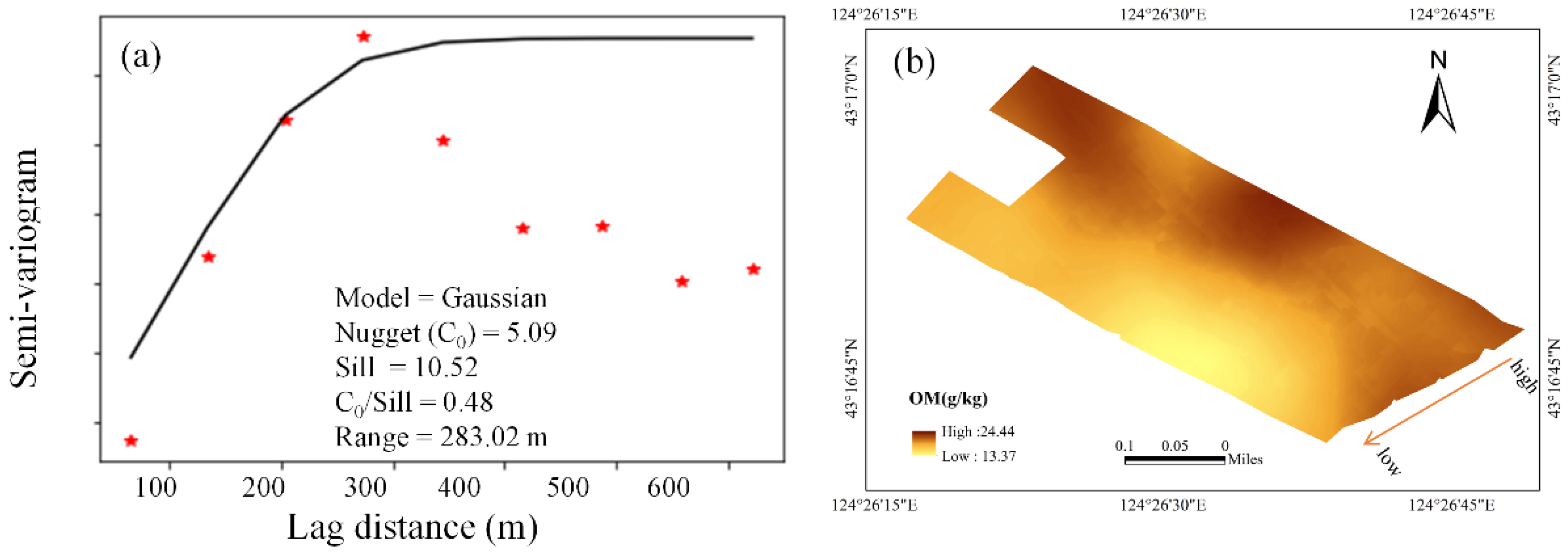
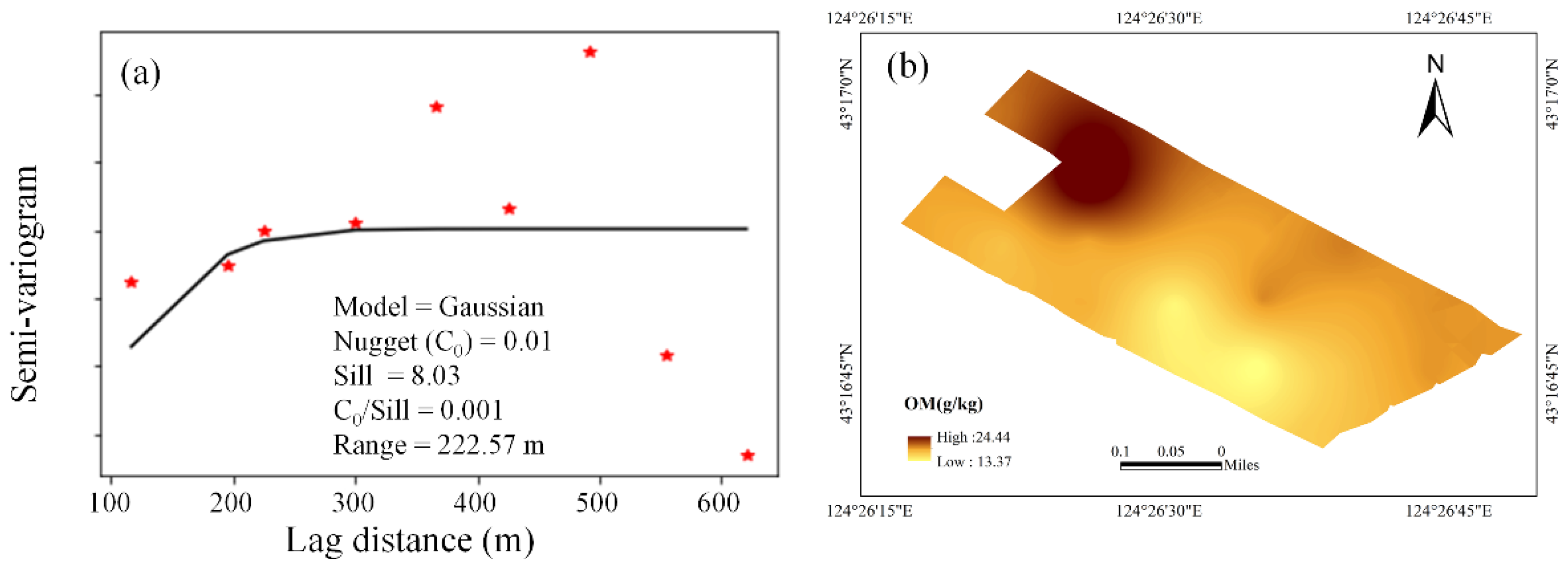
2.4.1. Semi-Variance Analysis
2.4.2. OK
2.5. Model Evaluation
3. Results
3.1. Basic Statistics
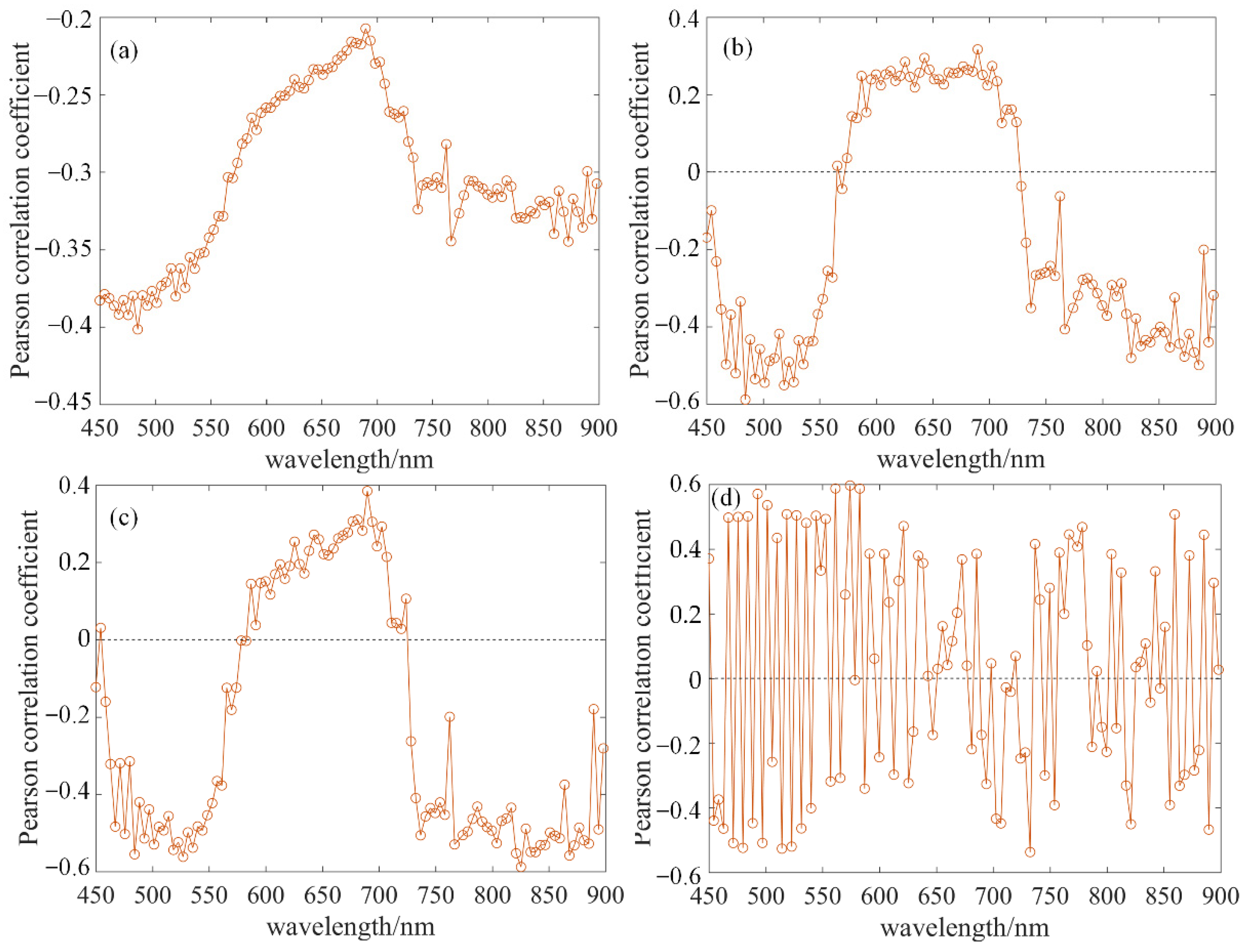
3.2. Spectral Pretreatment Methods for UAV Hyperspectral Data Analysis
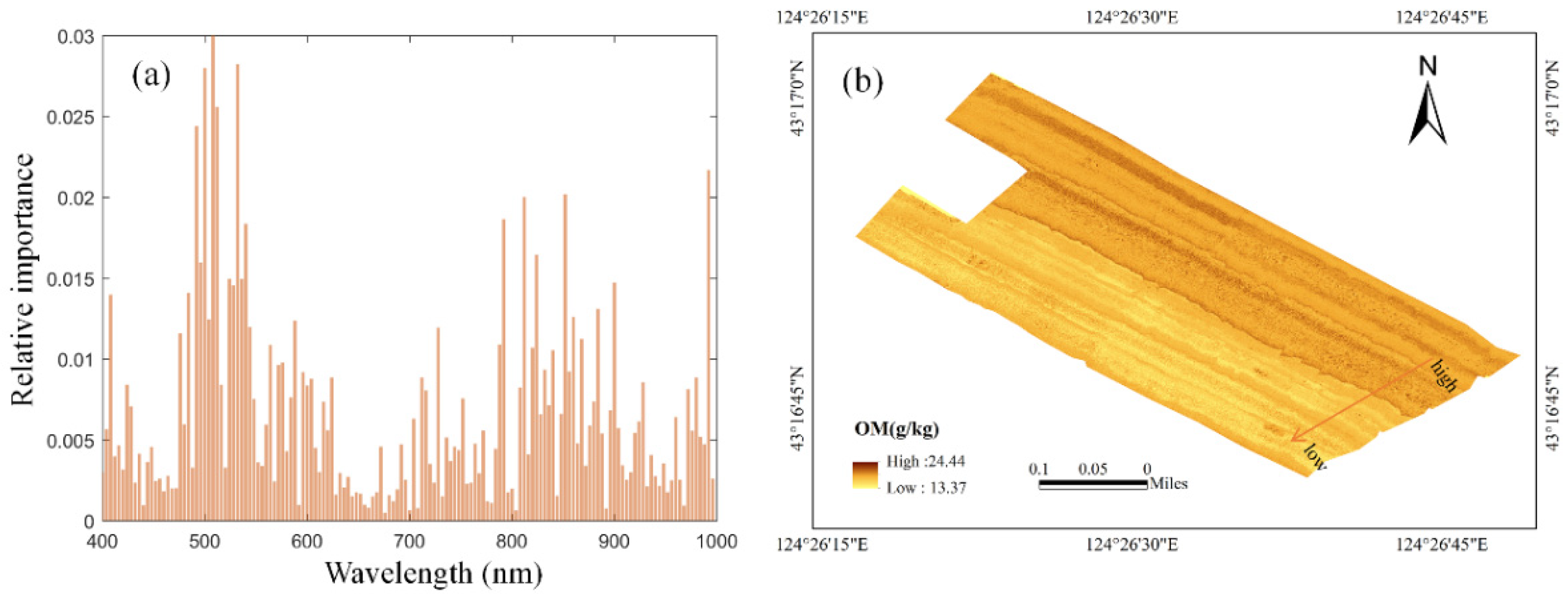
3.3. Performance of the RF Model Using UAV Hyperspectral Data (UAV-RF) in SOM Prediction
3.4. Performance of OK in SOM Prediction
3.5. Performance of the RF Model Using Proximal Sensing (PS-RF) in SOM Prediction
4. Discussion
4.1. Spectral Pretreatment Methods
4.2. Characteristic Bands of SOM
4.3. Comparison of the Effectiveness of UAV-RF, PS-RF, and Geostatistical Interpolation for SOM Prediction
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Xu, X.Z.; Xu, Y.; Chen, S.C.; Xu, S.G.; Zhang, H.W. Soil loss and conservation in the black soil region of Northeast China: A retrospective study. Environ. Sci. Policy 2010, 13, 793–800. [Google Scholar] [CrossRef]
- Rossel, R.V.; McBratney, A.B. Soil chemical analytical accuracy and costs: Implications from precision agriculture. Aust. J. Exp. Agric. 1998, 38, 765–775. [Google Scholar] [CrossRef]
- Ciais, P.; Gervois, S.; Vuichard, N.; Piao, S.L.; Viovy, N. Effects of land use change and management on the European cropland carbon balance. Glob. Change Biol. 2011, 17, 320–338. [Google Scholar] [CrossRef]
- Yan, Y.; Kayem, K.; Hao, Y.; Shi, Z.; Zhang, C.; Peng, J.; Liu, W.; Zuo, Q.; Ji, W.; Li, B. Mapping the Levels of Soil Salination and Alkalization by Integrating Machining Learning Methods and Soil-Forming Factors. Remote Sens. 2022, 14, 3020. [Google Scholar] [CrossRef]
- Zhang, N.; Zhang, X.; Yang, G.; Zhu, C.; Huo, L.; Feng, H. Assessment of defoliation during the Dendrolimus tabulaeformis Tsai et Liu disaster outbreak using UAV-based hyperspectral images. Remote Sens. Environ. 2018, 217, 323–339. [Google Scholar] [CrossRef]
- Bedini, E.; Van Der Meer, F.; Van Ruitenbeek, F. Use of HyMap imaging spectrometer data to map mineralogy in the Rodalquilar caldera, southeast Spain. Int. J. Remote Sens. 2009, 30, 327–348. [Google Scholar] [CrossRef]
- Tsouros, D.C.; Bibi, S.; Sarigiannidis, P.G. A review on UAV-based applications for precision agriculture. Information 2019, 10, 349. [Google Scholar] [CrossRef]
- Adão, T.; Hruška, J.; Pádua, L.; Bessa, J.; Peres, E.; Morais, R.; Sousa, J.J. Hyperspectral imaging: A review on UAV-based sensors, data processing and applications for agriculture and forestry. Remote Sens. 2017, 9, 1110. [Google Scholar] [CrossRef]
- Recena, R.; Fernández-Cabanás, V.M.; Delgado, A. Soil fertility assessment by Vis-NIR spectroscopy: Predicting soil functioning rather than availability indices. Geoderma 2019, 337, 368–374. [Google Scholar] [CrossRef]
- Zhu, W.; Rezaei, E.E.; Nouri, H.; Yang, T.; Li, B.; Gong, H.; Lyu, Y.; Peng, J.; Sun, Z. Quick detection of field-scale soil comprehensive attributes via the integration of UAV and sentinel-2B remote sensing data. Remote Sens. 2021, 13, 4716. [Google Scholar] [CrossRef]
- Hu, J.; Peng, J.; Zhou, Y.; Xu, D.; Zhao, R.; Jiang, Q.; Fu, T.; Wang, F.; Shi, Z. Quantitative estimation of soil salinity using UAV-borne hyperspectral and satellite multispectral images. Remote Sens. 2019, 11, 736. [Google Scholar] [CrossRef]
- Ivushkin, K.; Bartholomeus, H.; Bregt, A.K.; Pulatov, A.; Franceschini, M.H.; Kramer, H.; van Loo, E.N.; Roman, V.J.; Finkers, R. UAV based soil salinity assessment of cropland. Geoderma 2019, 338, 502–512. [Google Scholar] [CrossRef]
- Ge, X.; Wang, J.; Ding, J.; Cao, X.; Zhang, Z.; Liu, J.; Li, X. Combining UAV-based hyperspectral imagery and machine learning algorithms for soil moisture content monitoring. PeerJ 2019, 7, e6926. [Google Scholar] [CrossRef] [PubMed]
- Fang, Y.; Hu, Z.; Xu, L.; Wong, A.; Clausi, D.A. Estimation of iron concentration in soil of a mining area from UAV-based hyperspectral imagery. In Proceedings of the 2019 10th Workshop on Hyperspectral Imaging and Signal Processing: Evolution in Remote Sensing (WHISPERS), Amsterdam, The Netherlands, 24–26 September 2019; pp. 1–5. [Google Scholar]
- Wei, L.; Zhang, Y.; Lu, Q.; Yuan, Z.; Li, H.; Huang, Q. Estimating the spatial distribution of soil total arsenic in the suspected contaminated area using UAV-Borne hyperspectral imagery and deep learning. Ecol. Indic. 2021, 133, 108384. [Google Scholar] [CrossRef]
- Geladi, P.; MacDougall, D.; Martens, H. Linearization and scatter-correction for near-infrared reflectance spectra of meat. Appl. Spectrosc. 1985, 39, 491–500. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, Y.; Chen, Y.; Zhang, Y.; Shi, T.; Wang, J.; Hong, Y.; Fei, T.; Zhang, Y. The influence of spectral pretreatment on the selection of representative calibration samples for soil organic matter estimation using Vis-NIR reflectance spectroscopy. Remote Sens. 2019, 11, 450. [Google Scholar] [CrossRef]
- Silalahi, D.D.; Midi, H.; Arasan, J.; Mustafa, M.S.; Caliman, J. Robust generalized multiplicative scatter correction algorithm on pretreatment of near infrared spectral data. Vib. Spectrosc. 2018, 97, 55–65. [Google Scholar] [CrossRef]
- Cheng, H.; Shen, R.; Chen, Y.; Wan, Q.; Shi, T.; Wang, J.; Wan, Y.; Hong, Y.; Li, X. Estimating heavy metal concentrations in suburban soils with reflectance spectroscopy. Geoderma 2019, 336, 59–67. [Google Scholar] [CrossRef]
- Wollenhaupt, N.C.; Wolkowski, R.P. Grid soil sampling. Better Crops 1994, 78, 6–9. [Google Scholar]
- Nelson, D.A.; Sommers, L.E. Total carbon, organic carbon, and organic matter. In Methods of Soil Analysis: Part 2 Chemical and Microbiological Properties; Wiley: Hoboken, NJ, USA, 1983; Volume 9, pp. 539–579. [Google Scholar]
- Tan, C.; Zhang, P.; Zhou, X.; Wang, Z.; Xu, Z.; Mao, W.; Li, W.; Huo, Z.; Guo, W.; Yun, F. Quantitative monitoring of leaf area index in wheat of different plant types by integrating NDVI and Beer-Lambert law. Sci. Rep. 2020, 10, 929. [Google Scholar] [CrossRef]
- Wagenseil, H.; Samimi, C. Assessing spatio-temporal variations in plant phenology using Fourier analysis on NDVI time series: Results from a dry savannah environment in Namibia. Int. J. Remote Sens. 2006, 27, 3455–3471. [Google Scholar] [CrossRef]
- Yang, X.; Bao, N.; Li, W.; Liu, S.; Fu, Y.; Mao, Y. Soil nutrient estimation and mapping in farmland based on uav imaging spectrometry. Sensors 2021, 21, 3919. [Google Scholar] [CrossRef] [PubMed]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Cambardella, C.A.; Moorman, T.B.; Novak, J.M.; Parkin, T.B.; Karlen, D.L.; Turco, R.F.; Konopka, A.E. Field-scale variability of soil properties in central Iowa soils. Soil Sci. Soc. Am. J. 1994, 58, 1501–1511. [Google Scholar] [CrossRef]
- Chang, C.; Laird, D.A.; Mausbach, M.J.; Hurburgh, C.R. Near-infrared reflectance spectroscopy–principal components regression analyses of soil properties. Soil Sci. Soc. Am. J. 2001, 65, 480–490. [Google Scholar] [CrossRef]
- Ji, W.; Adamchuk, V.I.; Chen, S.; Su, A.S.M.; Ismail, A.; Gan, Q.; Shi, Z.; Biswas, A. Simultaneous measurement of multiple soil properties through proximal sensor data fusion: A case study. Geoderma 2019, 341, 111–128. [Google Scholar] [CrossRef]
- Hillel, D. Applications of Soil Physics; Elsevier: Amsterdam, The Netherlands, 2012. [Google Scholar]
- Stenberg, B.; Rossel, R.V.; Mouazen, A.M.; Wetterlind, J. Advances in Agronomy; Academic Press: Burlington, NJ, USA, 2010; Volume 107, pp. 163–215. [Google Scholar]
- Lu, Y.; Bai, Y.; Yang, L.; Wang, H. Prediction and validation of soil organic matter content based on hyperspectrum. Sci. Agric. Sin. 2007, 40, 1989–1995. [Google Scholar]
- Bao, Y.; Meng, X.; Ustin, S.; Wang, X.; Zhang, X.; Liu, H.; Tang, H. Vis-SWIR spectral prediction model for soil organic matter with different grouping strategies. Catena 2020, 195, 104703. [Google Scholar] [CrossRef]
- Rossel, R.V.; Walvoort, D.; McBratney, A.B.; Janik, L.J.; Skjemstad, J.O. Visible, near infrared, mid infrared or combined diffuse reflectance spectroscopy for simultaneous assessment of various soil properties. Geoderma 2006, 131, 59–75. [Google Scholar] [CrossRef]
- O’Rourke, S.M.; Holden, N.M. Determination of soil organic matter and carbon fractions in forest top soils using spectral data acquired from visible–near infrared hyperspectral images. Soil Sci. Soc. Am. J. 2012, 76, 586–596. [Google Scholar] [CrossRef]
- Ji, W.; Shi, Z.; Zhou, Q.; Zhou, L. VIS-NIR reflectance spectroscopy of the organic matter in several types of soils. J. Infrared Millim. Wave 2012, 31, 277–282. [Google Scholar] [CrossRef]
- Kweon, G.; Maxton, C. Soil organic matter sensing with an on-the-go optical sensor. Biosyst. Eng. 2013, 115, 66–81. [Google Scholar] [CrossRef]
- Zhang, Z.; Yu, D.; Shi, X.; Wang, N.; Zhang, G. Priority selection rating of sampling density and interpolation method for detecting the spatial variability of soil organic carbon in China. Environ. Earth Sci. 2015, 73, 2287–2297. [Google Scholar] [CrossRef]
- Njoku, E.A.; Akpan, P.E.; Effiong, A.E.; Babatunde, I.O. The effects of station density in geostatistical prediction of air temperatures in Sweden: A comparison of two interpolation techniques. Resour. Environ. Sustain. 2023, 11, 100092. [Google Scholar] [CrossRef]
- Tsui, C.; Liu, X.; Guo, H.; Chen, Z. Effect of Sampling Density on Estimation of Regional Soil Organic Carbon Stock for Rural Soils in Taiwan. In Geospatial Technology-Environmental and Social Applications; InTech: Rijeka, Croatia, 2016; pp. 35–53. [Google Scholar]
- Sun, W.; Zhao, Y.; Huang, B.; Shi, X.; Landon Darilek, J.; Yang, J.; Wang, Z.; Zhang, B. Effect of sampling density on regional soil organic carbon estimation for cultivated soils. J. Plant Nutr. Soil Sci. 2012, 175, 671–680. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sample Set | N | Mean | Min | Max | SD | CV (%) | Kurtosis | Skewness |
|---|---|---|---|---|---|---|---|---|
| The entire dataset | 92 | 18.13 | 11.95 | 26.45 | 2.72 | 0.15 | 3.85 | 0.34 |
| Calibration (50 m) | 72 | 18.12 | 11.95 | 26.45 | 2.86 | 0.16 | 0.88 | 0.5 |
| Calibration (100 m) | 20 | 17.7 | 12.83 | 25.82 | 2.74 | 0.15 | 2.98 | 0.98 |
| Validation | 20 | 18.16 | 12.59 | 21.35 | 2.15 | 0.12 | 0.95 | −1.06 |
| Method | Dataset | RMSE (g kg−1) | R2 | RPD |
|---|---|---|---|---|
| UAV-RF | Validation | 1.48 | 0.53 | 1.46 |
| Method | Dataset | RMSE (g kg−1) | R2 | RPD |
|---|---|---|---|---|
| OK (100 m × 100 m) | Validation | 2.17 | 0.02 | 0.99 |
| OK (50 m × 50 m) | Validation | 1.37 | 0.59 | 1.57 |
| Method | Dataset | RMSE (g kg−1) | R2 | RPD |
|---|---|---|---|---|
| PS-RF | Validation | 1.41 | 0.57 | 1.51 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, Y.; Yang, J.; Li, B.; Qin, C.; Ji, W.; Xu, Y.; Huang, Y. High-Resolution Mapping of Soil Organic Matter at the Field Scale Using UAV Hyperspectral Images with a Small Calibration Dataset. Remote Sens. 2023, 15, 1433. https://doi.org/10.3390/rs15051433
Yan Y, Yang J, Li B, Qin C, Ji W, Xu Y, Huang Y. High-Resolution Mapping of Soil Organic Matter at the Field Scale Using UAV Hyperspectral Images with a Small Calibration Dataset. Remote Sensing. 2023; 15(5):1433. https://doi.org/10.3390/rs15051433
Chicago/Turabian StyleYan, Yang, Jiajie Yang, Baoguo Li, Chengzhi Qin, Wenjun Ji, Yan Xu, and Yuanfang Huang. 2023. "High-Resolution Mapping of Soil Organic Matter at the Field Scale Using UAV Hyperspectral Images with a Small Calibration Dataset" Remote Sensing 15, no. 5: 1433. https://doi.org/10.3390/rs15051433
APA StyleYan, Y., Yang, J., Li, B., Qin, C., Ji, W., Xu, Y., & Huang, Y. (2023). High-Resolution Mapping of Soil Organic Matter at the Field Scale Using UAV Hyperspectral Images with a Small Calibration Dataset. Remote Sensing, 15(5), 1433. https://doi.org/10.3390/rs15051433