
Satellite Magnetics Suggest a Complex Geothermal Heat Flux Pattern beneath the Greenland Ice Sheet

Abstract
1. Introduction

2. Method
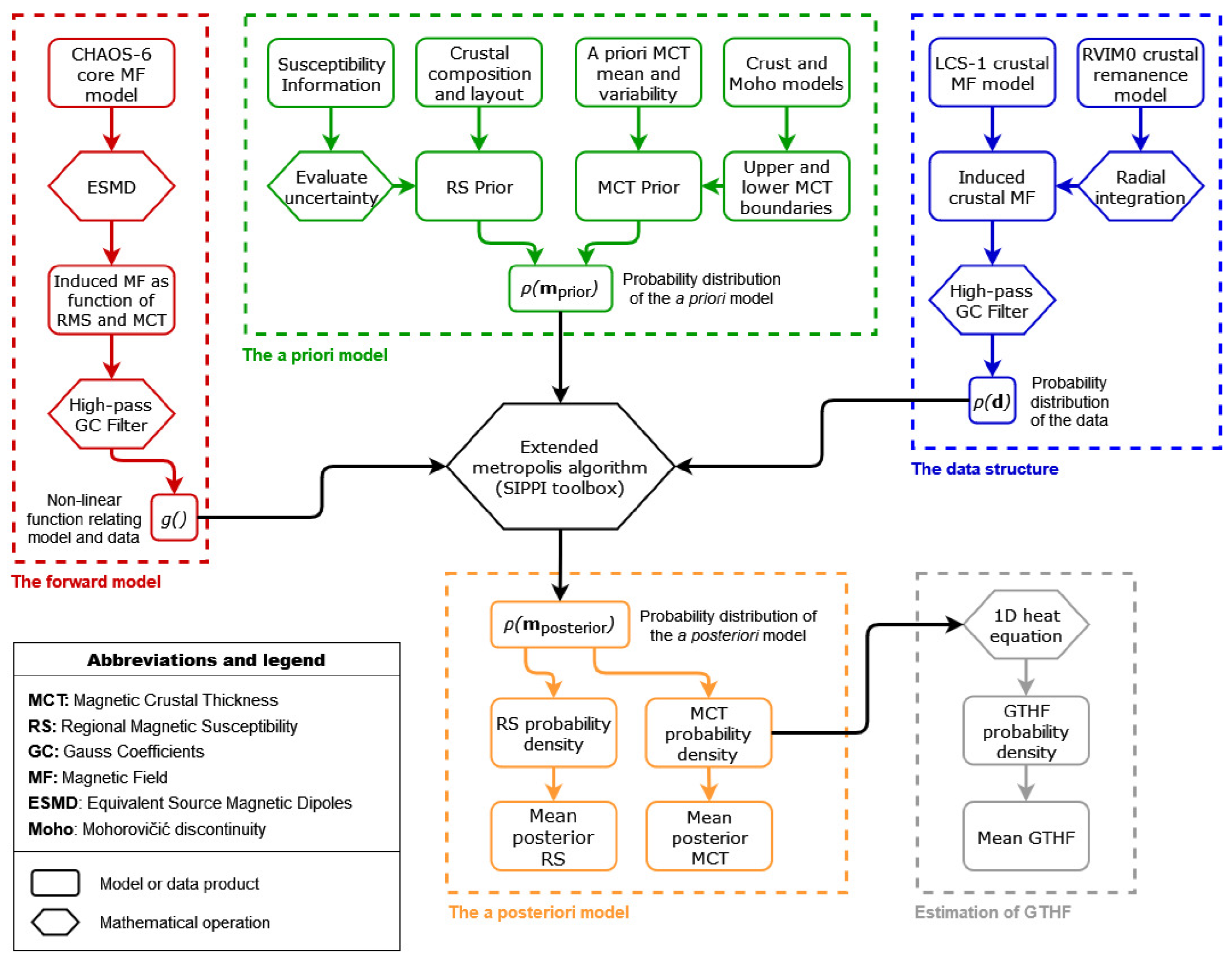
- 1.
- Samples can be drawn from the prior distribution;
- 2.
- The forward problem can be posed in such a way that it is solvable;
- 3.
- The likelihood of each solution can be evaluated, i.e., through evaluation of the data residual against a noise model.
3. Results
4. Discussion
4.1. No Clear Trace of a Mantle Plume
4.2. A Robust Heat Flux Anomaly near NEGIS Origin
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| GTHF | Geothermal Heat Flux |
| MCT | Magnetic Crustal Thickness |
| RS | Regional Susceptibility |
| NEGIS | Northeast Greenland Ice Stream |
Appendix A. Problem Parameterization

Appendix A.1. Determining the Distance of Negligible Influence

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Total Distance | Relative Impact | Query Point Position Relative to Dipole |
|---|---|---|
| 100% | Immediately above (at satellite altitude) | |
| ∼625 km | ∼10.8% | ∼ away |
| ∼1250 km | ∼1.2% | ∼ away |
| ∼2500 km | ∼0.16% | ∼ away |
| ∼13,000 km | ∼0.001% | At opposite side of Earth |
Appendix A.2. Solving the Linear Problem
Appendix B. Prior Information on the Unknown Model Parameters
| Region | Upper Crust Susceptibility | Lower Crust Susceptibility | Data Type |
|---|---|---|---|
| Ketilidian | or | Inferred | |
| Archaean | or | Inferred | |
| Caledonian | N/A | Direct | |
| Central | Inferred | ||
| North | N/A | Inferred | |
| oceanic | N/A | Inferred |
Appendix B.1. Susceptibility as a Function of Depth and Temperature
Appendix B.2. Susceptibility of the Ketilidian Mobile Belt
Appendix B.3. Susceptibility of the Archaean Block
Appendix B.4. Susceptibility of the Caledonian Fold Belt
Appendix B.5. Susceptibility of the Central Region
Appendix B.6. Susceptibility of the North Greenland Fold Belt
Appendix B.7. Susceptibility of the Oceanic crust
Appendix C. Probabilistic Solution Process and Forward Modeling Equations
- 1.
- Construct suitable probability distributions of the available prior information;
- 2.
- Draw a realization for each model parameter from the prior information;
- 3.
- Filter the model response to the same wavelengths as the crustal data (via Gauss Coefficients);
- 4.
- Solve the forward problem to obtain the magnetic response of the model, and compute the data misfit;
- 5.
- Evaluate whether or not to take a step in model space;
- 6.
- Repeat this process starting from step 2.
Appendix C.1. Sampling Strategy
- 1.
- Simulated annealing, in particular its ability to initialize the sampling scheme using a specific exploration setting, and then gradually decreasing that level of exploration;
- 2.
- Sequential Gibbs sampling, which enables us to optimize the step sizes taken toward a specific accept/reject rate;
- 3.
- Perturbation strategy, in particular how many parameter should be perturbed per iteration;
- 4.
- Iterations between posterior realizations, which enables us to determine how many iterations must occur before realizations can be considered statistically independent.
Appendix C.2. Forward Modeling Equations
Appendix D. Modeling Runs, Modeling Results, and GTHF Estimation
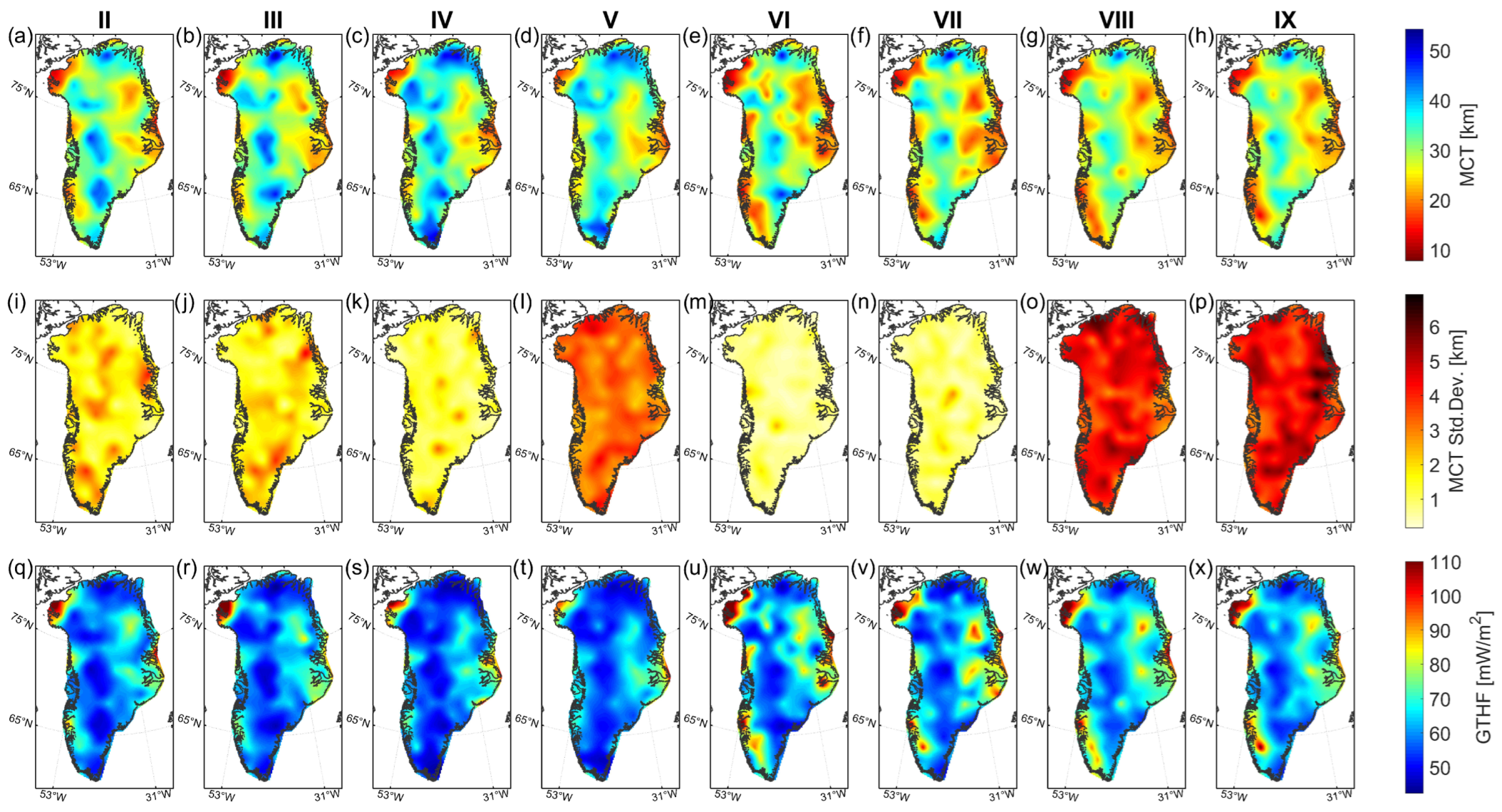
- II.
- Lower susceptibility of 35 assumed in the absence of lower susceptibility data;
- III.
- Strictly using the information available (no increase in susceptibility with depth without some form of geological evidence);
- IV.
- Same as III, but with a few of the susceptibility priors assumed to be more accurate than others, i.e., a few are assumed to already represent the RS well;
- V.
- Same as III, but with all of the susceptibility priors assumed to be more accurate, i.e., assumed to be good representations of the RS, and the data assumed to be less certain. The ocean floor MCT was also assumed to be even more uncertain than usual;
- VI.
- Same as II, but with a less certain MCT estimate alongside a less certain susceptibility estimate, while the data are assumed to be more accurate;
- VII.
- Same as II, but with a less certain MCT estimate while the data are assumed to be more accurate;
- VIII.
- Same as II, but with a less certain MCT estimate while, less certain data, and a higher overall susceptibility in the continental crust (the mean susceptibility values used to seed this run are equivalent to the fixed values used in [17];
- IX.
- Same as II, but with more uncertain MCT estimates, more uncertain susceptibilities, and more uncertain data.
| Ia | Ib | II | III | IV | V | VI | VII | VIII | IX | ||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Mean | C-MCT | 3/4 | 3/4 | 3/4 | 3/4 | 3/4 | 3/4 | 2/3 | 2/3 | 2/3 | 2/3 |
| O-MCT | 1/2 | 1/2 | 1/2 | 1/2 | 1/2 | 1/2 | 2/3 | 2/3 | 2/3 | 2/3 | |
| VIS | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | |
| Ketilidian | 9.1 | 9.1 | 9.1 | 9.1 | 9.1 | 9.1 | 9.1 | 9.1 | 35.0 | 9.1 | |
| Archaean | 24.6 | 24.6 | 24.6 | 14.1 | 14.1 | 14.1 | 24.6 | 24.6 | 35.0 | 24.6 | |
| Caledonian | 21.7 | 21.7 | 21.7 | 8.3 | 8.3 | 8.3 | 21.7 | 21.7 | 35.0 | 21.7 | |
| Central | 21.4 | 21.4 | 21.4 | 7.8 | 7.8 | 7.8 | 21.4 | 21.4 | 35.0 | 21.4 | |
| North | 27.2 | 27.2 | 27.2 | 19.3 | 19.3 | 19.3 | 27.2 | 27.2 | 35.0 | 27.2 | |
| Oceanic | 40.0 | 40.0 | 40.0 | 40.0 | 40.0 | 40.0 | 40.0 | 40.0 | 40.0 | 40.0 | |
| C-MCT | 1/8 | 1/8 | 1/8 | 1/8 | 1/8 | 1/8 | 1/5 | 1/6 | 1/5 | 1/5 | |
| O-MCT | 1/4 | 1/4 | 1/4 | 1/4 | 1/4 | 1/2 | 1/5 | 1/6 | 1/5 | 1/5 | |
| VIS | 1/3 | 1/3 | 1/3 | 1/3 | 1/3 | 1/3 | 1/3 | 1/3 | 1/3 | 1/3 | |
| Ketilidian | 1/3 | 1/3 | 1/3 | 1/3 | 1/6 | 1/6 | 1/2 | 1/3 | 1/3 | 1/2 | |
| Archaean | 1/3 | 1/3 | 1/3 | 1/3 | 1/6 | 1/6 | 1/2 | 1/3 | 1/3 | 1/2 | |
| Caledonian | 1/3 | 1/3 | 1/3 | 1/3 | 1/3 | 1/6 | 1/2 | 1/3 | 1/3 | 1/2 | |
| Central | 1/3 | 1/3 | 1/3 | 1/3 | 1/3 | 1/6 | 1/2 | 1/3 | 1/3 | 1/2 | |
| North | 1/3 | 1/3 | 1/3 | 1/3 | 1/3 | 1/6 | 1/2 | 1/3 | 1/3 | 1/2 | |
| Oceanic | 1/3 | 1/3 | 1/3 | 1/3 | 1/3 | 1/6 | 1/2 | 1/3 | 1/3 | 1/2 |
| Ia | Ib | II | III | IV | V | VI | VII | VIII | IX | ||
|---|---|---|---|---|---|---|---|---|---|---|---|
| BurnIn | 1 × | 1 × | 1 × | 1 × | 1 × | 1 × | 1 × | 1 × | 1 × | 1 × | |
| Seq.Gibbs | 1 × | 1 × | 1 × | 1 × | 1 × | 1 × | 1 × | 1 × | 1 × | 1 × | |
| 700 | 700 | 99 | 94 | 100 | 100 | 100 | 100 | 100 | 100 | ||
| 1 × | 1 × | 2 × | 2 × | 2 × | 2 × | 2 × | 2 × | 2 × | 2 × | ||
| SimAnneal | 0 | 1 × | 5 × | 5 × | 5 × | 5 × | 5 × | 5 × | 5 × | 5 × | |
| T | SimAnneal | 1 | 100 | 5 | 5 | 5 | 5 | 5 | 5 | 5 | 5 |
| Sampling | 1 | 3 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | |
| Data | 1 * | 1 | 1 | 1 | 1 | 1.7 | 0.5 | 0.5 | 1.7 | 1.5 |
Appendix D.1. Susceptibility Results
| Ia | Ib | II | III | IV | V | VI | VII | VIII | IX | ||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Mean | Ketilidian | 18.1 | 22.5 | 45.4 | 45.9 | 30.5 | 21.2 | 60.0 | 45.4 | 78.9 | 51.1 |
| Archaean | 95.7 | 81.5 | 62.8 | 58.4 | 44.3 | 42.6 | 76.8 | 65.3 | 78.5 | 75.4 | |
| Caledonian | 35.7 | 21.3 | 19.9 | 18.5 | 14.5 | 11.0 | 24.9 | 25.2 | 28.4 | 25.7 | |
| Central | 60.2 | 42.9 | 35.9 | 33.9 | 28.3 | 26.4 | 39.1 | 38.7 | 45.4 | 42.3 | |
| North | 25.2 | 8.7 | 9.4 | 5.4 | 7.9 | 7.9 | 8.1 | 12.0 | 14.2 | 12.9 | |
| Oceanic | 39.1 | 40.9 | 76.9 | 74.3 | 58.8 | 63.0 | 56.2 | 45.9 | 55.7 | 54.2 | |
| Ketilidian | 1.0 | 2.4 | 1.4 | 0.8 | 0.4 | 1.1 | 0.7 | 0.5 | 4.8 | 2.1 | |
| Archaean | 2.8 | 2.6 | 1.4 | 1.0 | 0.6 | 1.3 | 1.9 | 0.4 | 3.4 | 3.0 | |
| Caledonian | 0.9 | 1.4 | 0.8 | 0.4 | 0.4 | 0.7 | 0.4 | 0.5 | 1.7 | 1.5 | |
| Central | 1.0 | 1.2 | 0.5 | 0.4 | 0.2 | 0.5 | 0.4 | 0.2 | 1.3 | 1.0 | |
| North | 1.9 | 2.0 | 0.7 | 0.9 | 0.6 | 1.7 | 0.6 | 0.9 | 3.3 | 2.4 | |
| Oceanic | 3.1 | 13.6 | 1.4 | 2.4 | 1.3 | 3.2 | 0.2 | 0.5 | 1.9 | 2.1 |
Appendix D.2. Estimating Geothermal Heat Flux
References
- Wolfe, C.J.; Bjarnason, I.T.; VanDecar, J.C.; Solomon, S.C. Seismic structure of the Iceland mantle plume. Nature 1997, 385, 245–247. [Google Scholar] [CrossRef]
- Bijwaard, H.; Spakman, W. Tomographic evidence for a narrow whole mantle plume below Iceland. Earth Planet. Sci. Lett. 1999, 166, 121–126. [Google Scholar] [CrossRef]
- French, S.W.; Romanowicz, B. Broad plumes rooted at the base of the Earth’s mantle beneath major hotspots. Nature 2015, 525, 95–99. [Google Scholar] [CrossRef] [PubMed]
- Anell, I.; Thybo, H.; Artemieva, I.M. Cenozoic uplift and subsidence in the North Atlantic region: Geological evidence revisited. Tectonophysics 2009, 474, 78–105. [Google Scholar] [CrossRef]
- Bonow, J.M.; Japsen, P.; Nielsen, T.F. High-level landscapes along the margin of southern East Greenland—A record of tectonic uplift and incision after breakup in the NE Atlantic. Glob. Planet. Chang. 2014, 116, 10–29. [Google Scholar] [CrossRef]
- Døssing, A.; Japsen, P.; Watts, A.B.; Nielsen, T.; Jokat, W.; Thybo, H.; Dahl-Jensen, T. Miocene uplift of the NE Greenland margin linked to plate tectonics: Seismic evidence from the Greenland Fracture Zone, NE Atlantic. Tectonics 2016, 35, 257–282. [Google Scholar] [CrossRef]
- Rohrman, M.; van der Beek, P. Cenozoic postrift domal uplift of North Atlantic margins: An asthenospheric diapirism model. Geology 1996, 24, 901–904. [Google Scholar] [CrossRef]
- Arrowsmith, S.J.; Kendall, M.; White, N.; VanDecar, J.C.; Booth, D.C. Seismic imaging of a hot upwelling beneath the British Isles. Geology 2005, 33, 345–348. [Google Scholar] [CrossRef]
- Rickers, F.; Fichtner, A.; Trampert, J. The Iceland–Jan Mayen plume system and its impact on mantle dynamics in the North Atlantic region: Evidence from full-waveform inversion. Earth Planet. Sci. Lett. 2013, 367, 39–51. [Google Scholar] [CrossRef]
- Steinberger, B.; Bredow, E.; Lebedev, S.; Schaeffer, A.; Torsvik, T.H. Widespread volcanism in the Greenland–North Atlantic region explained by the Iceland plume. Nat. Geosci. 2019, 12, 61–68. [Google Scholar] [CrossRef]
- Torsvik, T.H.; Mosar, J.; Eide, E.A. Cretaceous–tertiary geodynamics: A North Atlantic exercise. Geophys. J. Int. 2001, 146, 850–866. [Google Scholar] [CrossRef]
- Forsyth, D.A.; Morel-AL’Huissier, P.; Asudeh, I.; Green, A.G. Alpha Ridge and iceland-products of the same plume? J. Geodyn. 1986, 6, 197–214. [Google Scholar] [CrossRef]
- Lawver, L.A.; Müller, R.D. Iceland hotspot track. Geology 1994, 22, 311–314. [Google Scholar] [CrossRef]
- Steinberger, B.; Spakman, W.; Japsen, P.; Torsvik, T.H. The key role of global solid-Earth processes in preconditioning Greenland’s glaciation since the Pliocene. Terra Nova 2015, 27, 1–8. [Google Scholar] [CrossRef]
- Smith-Johnsen, S.; de Fleurian, B.; Schlegel, N.; Seroussi, H.; Nisancioglu, K. Exceptionally high heat flux needed to sustain the Northeast Greenland Ice Stream. Cryosphere 2020, 14, 841–854. [Google Scholar] [CrossRef]
- Khan, S.; Choi, Y.; Morlighem, M.; Rignot, E.; Helm, V.; Humbert, A.; Mouginot, J.; Millan, R.; Kjær, K.; Bjørk, A. Extensive inland thinning and speed-up of Northeast Greenland Ice Stream. Nature 2022, 611, 727–732. [Google Scholar] [CrossRef]
- Fox Maule, C.; Purucker, M.E.; Olsen, N. Inferring maGnetic Crustal Thickness and Geothermal Heat Flux from Crustal Magnetic Field Models. Danish Climate Centre, Report 09–09; Danish Meteorological Institute: Copenhagen, Denmark, 2009. [Google Scholar]
- Martos, Y.M.; Jordan, T.A.; Catalán, M.; Jordan, T.M.; Bamber, J.L.; Vaughan, D.G. Geothermal Heat Flux Reveals the Iceland Hotspot Track Underneath Greenland. Geophys. Res. Lett. 2018, 45, 8214–8222. [Google Scholar] [CrossRef]
- Greve, R. Relation of measured basal temperatures and the spatial distribution of the geothermal heat flux for the Greenland ice sheet. Ann. Glaciol. 2005, 42, 424–432. [Google Scholar] [CrossRef]
- Colgan, W.; Wansing, A.; Mankoff, K.; Lösing, M.; Hopper, J.; Louden, K.; Ebbing, J.; Christiansen, F.G.; Ingeman-Nielsen, T.; Liljedahl, L.C.; et al. Greenland Geothermal Heat Flow Database and Map (Version 1). Earth Syst. Sci. Data 2022, 14, 2209–2238. [Google Scholar] [CrossRef]
- Rogozhina, I.; Hagedoorn, J.M.; Martinec, Z.; Fleming, K.; Soucek, O.; Greve, R.; Thomas, M. Effects of uncertainties in the geothermal heat flux distribution on the Greenland Ice Sheet: An assessment of existing heat flow models. J. Geophys. Res. Earth Surf. 2012, 117, F02025. [Google Scholar] [CrossRef]
- Bamber, J.L.; Layberry, R.L.; Gogineni, S. A new ice thickness and bed data set for the Greenland ice sheet: 1. Measurement, data reduction, and errors. J. Geophys. Res. Atmos. 2001, 106, 33773–33780. [Google Scholar] [CrossRef]
- Tarantola, A. Inverse Problem Theory and Methods for Model Parameter Estimation; SIAM: Philadelphia, PA, USA, 2005; p. 342. [Google Scholar]
- Mosegaard, K.; Tarantola, A. Monte Carlo sampling of solutions to inverse problems. J. Geophys. Res. Solid Earth 1995, 100, 12431–12447. [Google Scholar] [CrossRef]
- Hansen, T.M.; Cordua, K.S.; Looms, M.C.; Mosegaard, K. SIPPI: A Matlab toolbox for sampling the solution to inverse problems with complex prior information: Part 1–Methodology. Comput. Geosci. 2013, 52, 470–480. [Google Scholar] [CrossRef]
- Hansen, T.M.; Cordua, K.S.; Looms, M.C.; Mosegaard, K. SIPPI: A Matlab toolbox for sampling the solution to inverse problems with complex prior information: Part 2—Application to crosshole GPR tomography. Comput. Geosci. 2013, 52, 481–492. [Google Scholar] [CrossRef]
- Steinberger, B.; Sutherland, R.; O’connell, R.J. Prediction of Emperor-Hawaii seamount locations from a revised model of global plate motion and mantle flow. Nature 2004, 430, 167–173. [Google Scholar] [CrossRef]
- Cox, A.; Hart, R.B. Plate Tectonics: How It Works; John Wiley & Sons: Hoboken, NJ, USA, 2009. [Google Scholar]
- O’Neill, C.; Müller, D.; Steinberger, B. On the uncertainties in hot spot reconstructions and the significance of moving hot spot reference frames. Geochem. Geophys. Geosystems 2005, 6. [Google Scholar] [CrossRef]
- Doubrovine, P.V.; Steinberger, B.; Torsvik, T.H. Absolute plate motions in a reference frame defined by moving hot spots in the Pacific, Atlantic, and Indian oceans. J. Geophys. Res. Solid Earth 2012, 117. [Google Scholar] [CrossRef]
- Müller, R.D.; Royer, J.Y.; Lawver, L.A. Revised plate motions relative to the hotspots from combined Atlantic and Indian Ocean hotspot tracks. Geology 1993, 21, 275–278. [Google Scholar] [CrossRef]
- Olsen, N.; Ravat, D.; Finlay, C.; Kother, L.K. LCS-1: A high-resolution global model of the lithospheric magnetic field derived from CHAMP and Swarm satellite observations. Geophys. J. Int. 2017, 211, 1461–1477. [Google Scholar] [CrossRef]
- Fox Maule, C.; Purucker, M.E.; Olsen, N.; Mosegaard, K. Heat flux anomalies in Antarctica revealed by satellite magnetic data. Science 2005, 309, 464–467. [Google Scholar] [CrossRef] [PubMed]
- Dyment, J.; Arkani-Hamed, J. Equivalent source magnetic dipoles revisited. Geophys. Res. Lett. 1998, 25, 2003–2006. [Google Scholar] [CrossRef]
- Escher, A.; Watt, W.S. Geology of Greenland; Geological Survey of Greenland: København, Denmark, 1976. [Google Scholar]
- Goodwin, A.M. Chapter 1—Distribution and Tectonic Setting of Precambrian Crust. In Principles of Precambrian Geology; Goodwin, A.M., Ed.; Academic Press: London, UK, 1996; p. 32. [Google Scholar] [CrossRef]
- Kolb, J. Structure of the Palaeoproterozoic Nagssugtoqidian Orogen, South-East Greenland: Model for the tectonic evolution. Precambrian Res. 2014, 255, 809–822. [Google Scholar] [CrossRef]
- Matthews, K.J.; Maloney, K.T.; Zahirovic, S.; Williams, S.E.; Seton, M.; Mueller, R.D. Global plate boundary evolution and kinematics since the late Paleozoic. Glob. Planet. Chang. 2016, 146, 226–250. [Google Scholar] [CrossRef]
- Tarantola, A.; Valette, B. Inverse Problems = Quest for Information. J. Geophys. 1982, 50, 159–170. [Google Scholar]
- Paige, C.; Saunders, M. LSQR—An algorithm for sparse linear-equations and sparse least-squares. ACM Trans. Math. Softw. 1982, 8, 43–71. [Google Scholar] [CrossRef]
- Darbyshire, F.A.; Dahl-Jensen, T.; Larsen, T.B.; Voss, P.H.; Joyal, G. Crust and uppermost-mantle structure of Greenland and the Northwest Atlantic from Rayleigh wave group velocity tomography. Geophys. J. Int. 2018, 212, 1546–1569. [Google Scholar] [CrossRef]
- Laske, G.; Masters, G.; Ma, Z.; Pasyanos, M. Update on CRUST1.0—A 1-degree Global Model of Earth’s Crust. In Proceedings of the EGU General Assembly Conference Abstracts, Gottingen, Germany, 23–28 April 2013; Volume 15, p. EGU2013-2658. [Google Scholar]
- St-Onge, M.R.; Van Gool, J.A.; Garde, A.A.; Scott, D.J. Correlation of Archaean and Palaeoproterozoic units between northeastern Canada and western Greenland: Constraining the pre-collisional upper plate accretionary history of the Trans-Hudson orogen. Geol. Soc. 2009, 318, 193–235. [Google Scholar] [CrossRef]
- Kerr, A.; Hall, J.; Wardle, R.; Gower, C.; Ryan, B. New reflections on the structure and evolution of the Makkovikian-Ketilidian Orogen in Labrador and southern Greenland. Tectonics 1997, 16, 942–965. [Google Scholar] [CrossRef]
- Van Breemen, O.; Aftalion, M.; Allaart, J. Isotopic and geochronologic studies on granites from the Ketilidian mobile belt of South Greenland. Geol. Soc. Am. Bull. 1974, 85, 403–412. [Google Scholar] [CrossRef]
- Korja, T.; Smirnov, M.; Pedersen, L.B.; Gharibi, M. Structure of the Central Scandinavian Caledonides and the underlying Precambrian basement, new constraints from magnetotellurics. Geophys. J. Int. 2008, 175, 55–69. [Google Scholar] [CrossRef]
- Kalsbeek, F.; Taylor, P.; Pidgeon, R. Unreworked Archean Basement and Proterozoic Supracrustal Rocks from Northeastern Disko Bugt, West Greenland—Implications for the Nature of Proterozoic Mobile Belts in Greenland. Can. J. Earth Sci. 1988, 25, 773–782. [Google Scholar] [CrossRef]
- Sanborn-Barrie, M.; Thrane, K.; Wodicka, N.; Rayner, N. The Laurentia—West Greenland connection at 1.9 Ga: New insights from the Rinkian fold belt. Gondwana Res. 2017, 51, 289–309. [Google Scholar] [CrossRef]
- Mertanen, S.; Karell, F. Rock magnetic investigations constraining relative timing for gold deposits in Finland. Bull. Geol. Soc. Finl. 2011, 83, 75–94. [Google Scholar] [CrossRef]
- Tschirhart, V.; St-Onge, M.R.; Weller, O. Preliminary geophysical interpretation of the McKeand River area, southern Baffin Island, Nunavut: Insights from gravity, magnetic and geological data. Summ. Act. 2015, 2015, 49–60. [Google Scholar]
- Olesen, O.; Bronner, M.; Ebbing, J.; Gellein, J.; Gernigon, L.; Koziel, J.; Lauritsen, T.; Myklebust, R.; Pascal, C.; Sand, M.; et al. New aeromagnetic and gravity compilations from Norway and adjacent areas: Methods and applications. Pet. Geol. Conf. Ser. 2010, 7, 559–586. [Google Scholar] [CrossRef]
- Schlindwein, V. Structure and evolution of the continental crust of northern east Greenland from integrated geophysical studies. Ber. Polarforsch. 1998, 270, 15227–15245. [Google Scholar] [CrossRef]
- Estrada, S.; Damaske, D.; Henjes-Kunst, F.; Schreckenberger, B.; Oakey, G.N.; Piepjohn, K.; Eckelmann, K.; Linnemannn, U. Multistage Cretaceous magmatism in the northern coastal region of Ellesmere Island and its relation to the formation of Alpha Ridge—Evidence from aeromagnetic, geochemical and geochronological data. Nor. J. Geol. 2016, 96, 65–95. [Google Scholar] [CrossRef]
- Schlinger, C.M. Magnetization of lower crust and interpretation of regional magnetic anomalies: Example from Lofoten and Vesteralen, Norway. J. Geophys. Res. 1985, 90, 11484–11504. [Google Scholar] [CrossRef]
- Elo, S.; Korja, A. Geophysical Interpretation of the Crustal and Upper-Mantle Structure in the Wiboorg Rapakivi Granite Area, Southeastern Finland. Precambrian Res. 1993, 64, 273–288. [Google Scholar] [CrossRef]
- Williams, M.; Shive, P.; Fountain, D.; Frost, B. Magnetic-Properties of Exposed Deep crustal Rocks From the Superior Province of Manitoba. Earth Planet. Sci. Lett. 1985, 76, 176–184. [Google Scholar] [CrossRef]
- Pilkington, M.; Percival, J.A. Crustal magnetization and long-wavelength aeromagnetic anomalies of the Minto block, Quebec. J. Geophys. Res. Solid Earth 1999, 104, 7513–7526. [Google Scholar] [CrossRef]
- Purucker, M.; Langlais, B.; Olsen, N.; Hulot, G.; Mandea, M. The southern edge of cratonic North America: Evidence from new satellite magnetometer observations. Geophys. Res. Lett. 2002, 29, 56-1–56-4. [Google Scholar] [CrossRef]
- Goodwin, A.M. Chapter 3—Early Proterozoic Crust. In Principles of Precambrian Geology; Goodwin, A.M., Ed.; Academic Press: London, UK, 1996; pp. 123–176. [Google Scholar] [CrossRef]
- Lucas, S.B.; St-Onge, M.R. Geology of the Precambrian Superior and Grenville Provinces and Precambian Fossils in North America; Geological Society of America: Boulder, CO, USA, 1998. [Google Scholar]
- Purucker, M.E.; Langel, R.A.; Rajaram, M.; Raymond, C. Global magnetization models with a priori information. J. Geophys. Res. Solid Earth 1998, 103, 2563–2584. [Google Scholar] [CrossRef]
- Masterton, S.M.; Gubbins, D.; Mueller, R.D.; Singh, K.H. Forward modelling of oceanic lithospheric magnetization. Geophys. J. Int. 2012, 192, 951–962. [Google Scholar] [CrossRef]
- Finlay, C.; Olsen, N.; Kotsiaros, S.; Gillet, N.; Tøffner-Clausen, L. Recent geomagnetic secular variation from Swarm and ground observatories as estimated in the CHAOS-6 geomagnetic field model. Earth Planets Space 2016, 68, 112. [Google Scholar] [CrossRef]
- Artemieva, I.; Mooney, W. Thermal thickness and evolution of Precambrian lithosphere: A global study. J. Geophys.-Res.-Solid Earth 2001, 106, 16387–16414. [Google Scholar] [CrossRef]
- Fox Maule, C. Geophysical Interpretation of Magnetic Field Models. Ph.D. Thesis, University of Copenhagen, Faculty of Science, København, Denmark, 2005. [Google Scholar]
- Jaupart, C.; Mareschal, J.C. The thermal structure and thickness of continental roots. Dev. Geotecton. 1999, 24, 93–114. [Google Scholar] [CrossRef]
- Jaupart, C.; Mareschal, J.C.; Iarotsky, L. Radiogenic heat production in the continental crust. Lithos 2016, 262, 398–427. [Google Scholar] [CrossRef]
- Drury, M.J. The heat flow—heat generation relationship: Implications for the nature of continental crust. Tectonophysics 1989, 164, 93–106. [Google Scholar] [CrossRef]
- Pribnow, D.; Winter, H. Radiogenic heat production in the upper third of continental crust from KTB. Geophys. Res. Lett. 1997, 24, 349–352. [Google Scholar] [CrossRef]
- Howell, S.M.; Ito, G.; Breivik, A.J.; Rai, A.; Mjelde, R.; Hanan, B.; Sayit, K.; Vogt, P. The origin of the asymmetry in the Iceland hotspot along the Mid-Atlantic Ridge from continental breakup to present-day. Earth Planet. Sci. Lett. 2014, 392, 143–153. [Google Scholar] [CrossRef]
- Dordevic, M.; Georgen, J. Dynamics of plume-triple junction interaction: Results from a series of three-dimensional numerical models and implications for the formation of oceanic plateaus. J. Geophys. Res. Solid Earth 2016, 121, 1316–1342. [Google Scholar] [CrossRef]
- Heyn, B.H.; Conrad, C.P. On the Relation Between Basal Erosion of the Lithosphere and Surface Heat Flux for Continental Plume Tracks. Geophys. Res. Lett. 2022, 49, e2022GL098003. [Google Scholar] [CrossRef]
- Rogozhina, I.; Petrunin, A.G.; Vaughan, A.P.; Steinberger, B.; Johnson, J.V.; Kaban, M.K.; Calov, R.; Rickers, F.; Thomas, M.; Koulakov, I. Melting at the base of the Greenland ice sheet explained by Iceland hotspot history. Nat. Geosci. 2016, 9, 366–369. [Google Scholar] [CrossRef]
- Fahnestock, M.; Abdalati, W.; Joughin, I.; Brozena, J.; Gogineni, P. High geothermal heat flow, basal melt, and the origin of rapid ice flow in central Greenland. Science 2001, 294, 2338–2342. [Google Scholar] [CrossRef] [PubMed]
- Toyokuni, G.; Matsuno, T.; Zhao, D. P Wave Tomography Beneath Greenland and Surrounding Regions: 2. Lower Mantle. J. Geophys. Res. Solid Earth 2020, 125, e2020JB019839. [Google Scholar] [CrossRef]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kolster, M.E.; Døssing, A.; Khan, S.A. Satellite Magnetics Suggest a Complex Geothermal Heat Flux Pattern beneath the Greenland Ice Sheet. Remote Sens. 2023, 15, 1379. https://doi.org/10.3390/rs15051379
Kolster ME, Døssing A, Khan SA. Satellite Magnetics Suggest a Complex Geothermal Heat Flux Pattern beneath the Greenland Ice Sheet. Remote Sensing. 2023; 15(5):1379. https://doi.org/10.3390/rs15051379
Chicago/Turabian StyleKolster, Mick Emil, Arne Døssing, and Shfaqat Abbas Khan. 2023. "Satellite Magnetics Suggest a Complex Geothermal Heat Flux Pattern beneath the Greenland Ice Sheet" Remote Sensing 15, no. 5: 1379. https://doi.org/10.3390/rs15051379
APA StyleKolster, M. E., Døssing, A., & Khan, S. A. (2023). Satellite Magnetics Suggest a Complex Geothermal Heat Flux Pattern beneath the Greenland Ice Sheet. Remote Sensing, 15(5), 1379. https://doi.org/10.3390/rs15051379