
Impact of SAR Azimuth Ambiguities on Doppler Velocity Estimation Performance: Modeling and Analysis
 , , ,
, , ,
Abstract
1. Introduction
- (1)
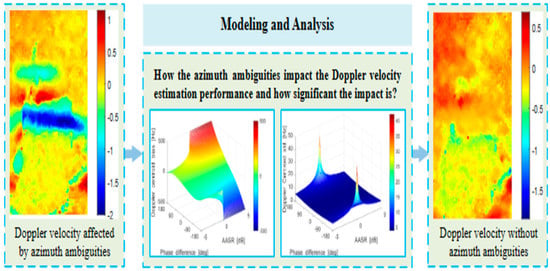
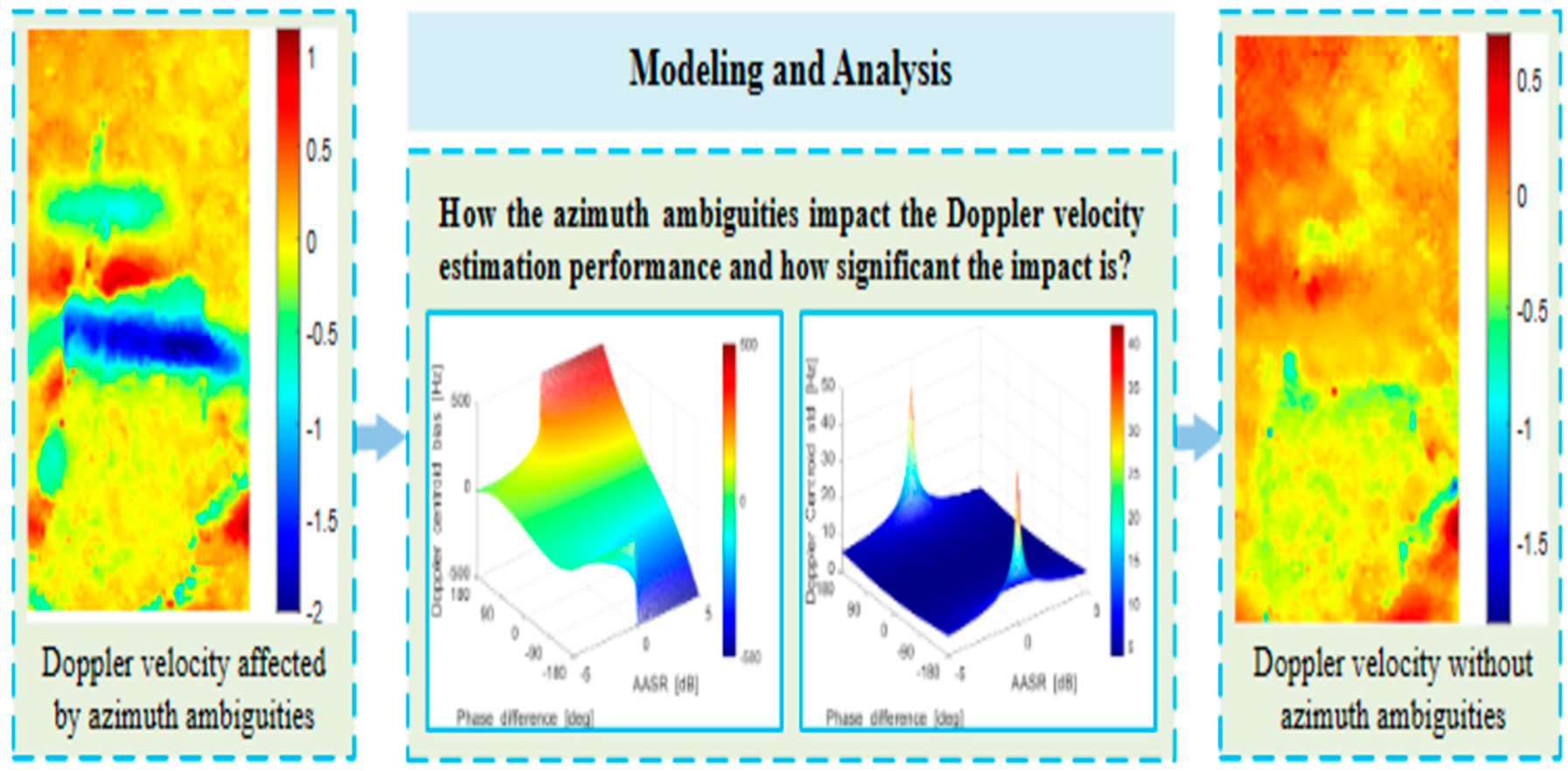
- A model for ocean surface Doppler velocity estimation affected by azimuth ambiguities is developed to investigate how the azimuth ambiguities impact the ocean surface Doppler velocity estimation performance.
- (2)
- Based on the developed model, the estimated bias and standard deviation are derived, and how significant the azimuth ambiguities affect the Doppler velocity estimation performance is quantitatively analyzed.
2. Model for Ocean Surface Doppler Velocity Estimation Affected by Azimuth Ambiguities
3. Statistic of Doppler Velocity Estimation Affected by Azimuth Ambiguities
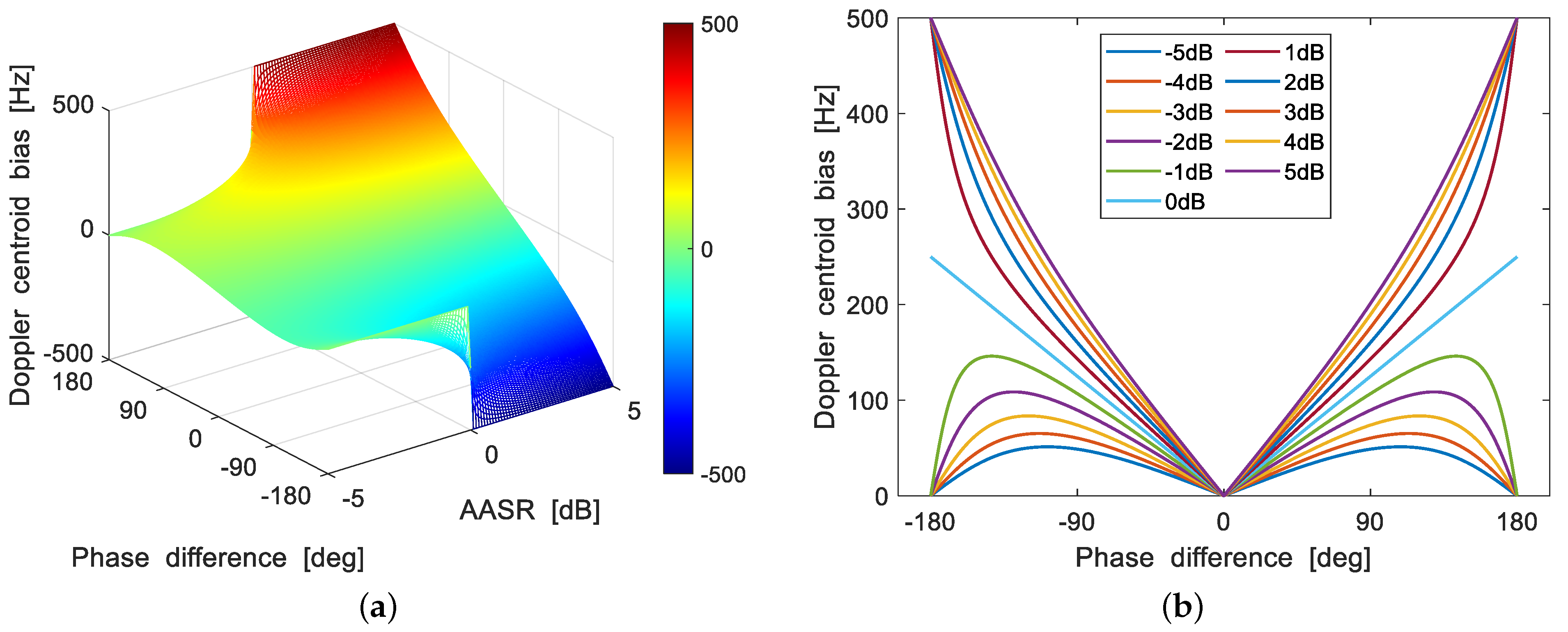
3.1. Doppler Velocity Estimation Bias Affected by Azimuth Ambiguities
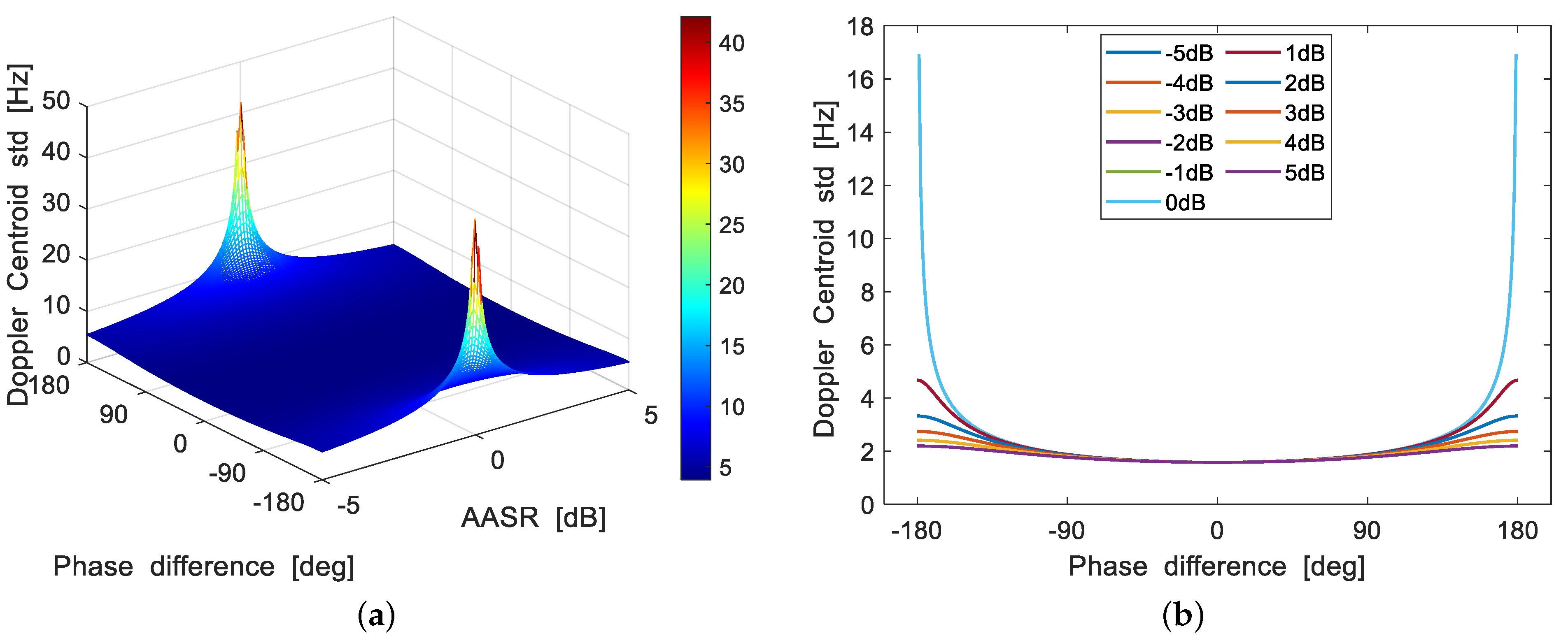
3.2. Standard Deviation of Doppler Velocity Estimates Affected by Azimuth Ambiguities
4. Validation
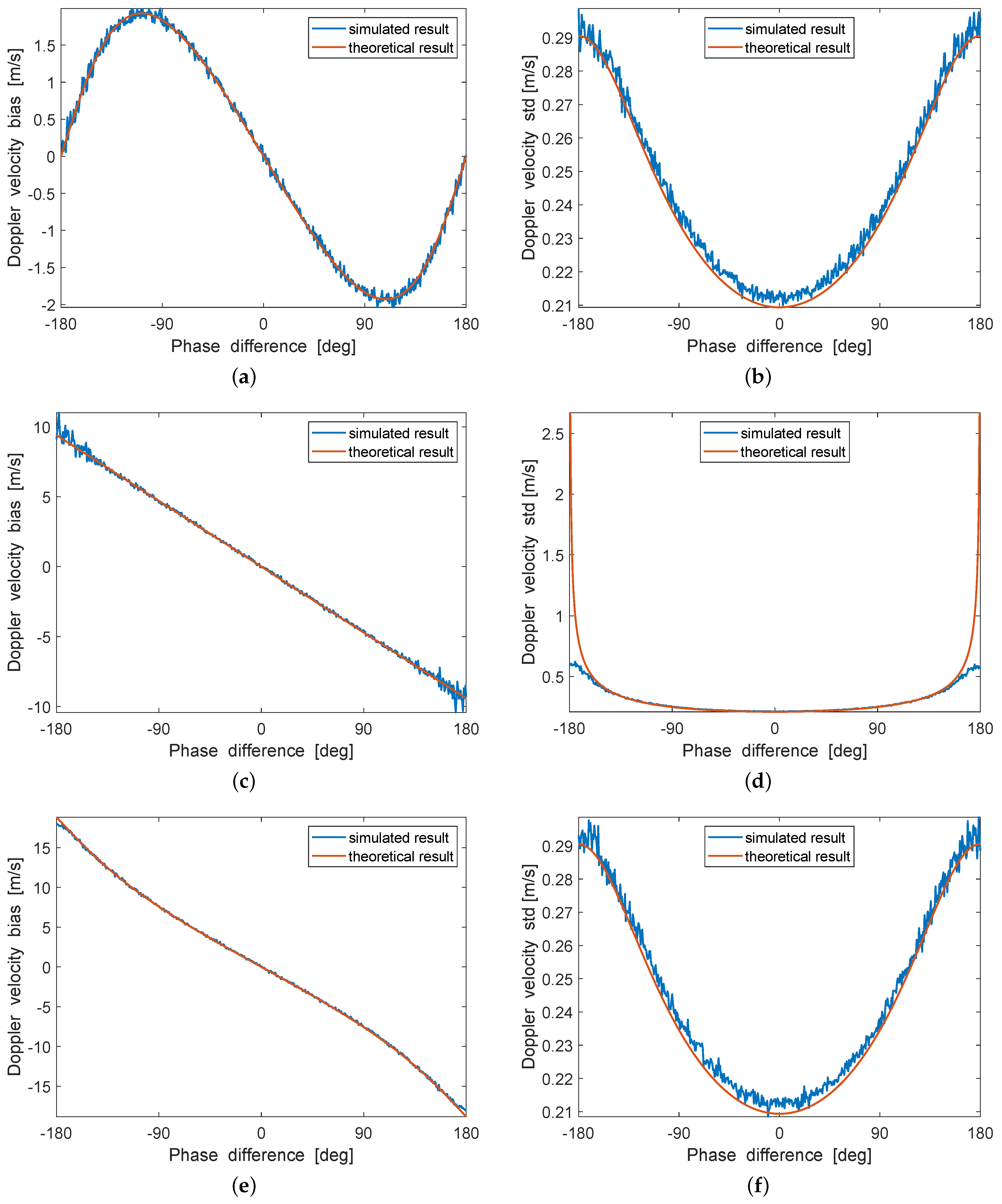
4.1. Validation with Simulation
4.2. Validation with Chinese GF-3 SAR Data
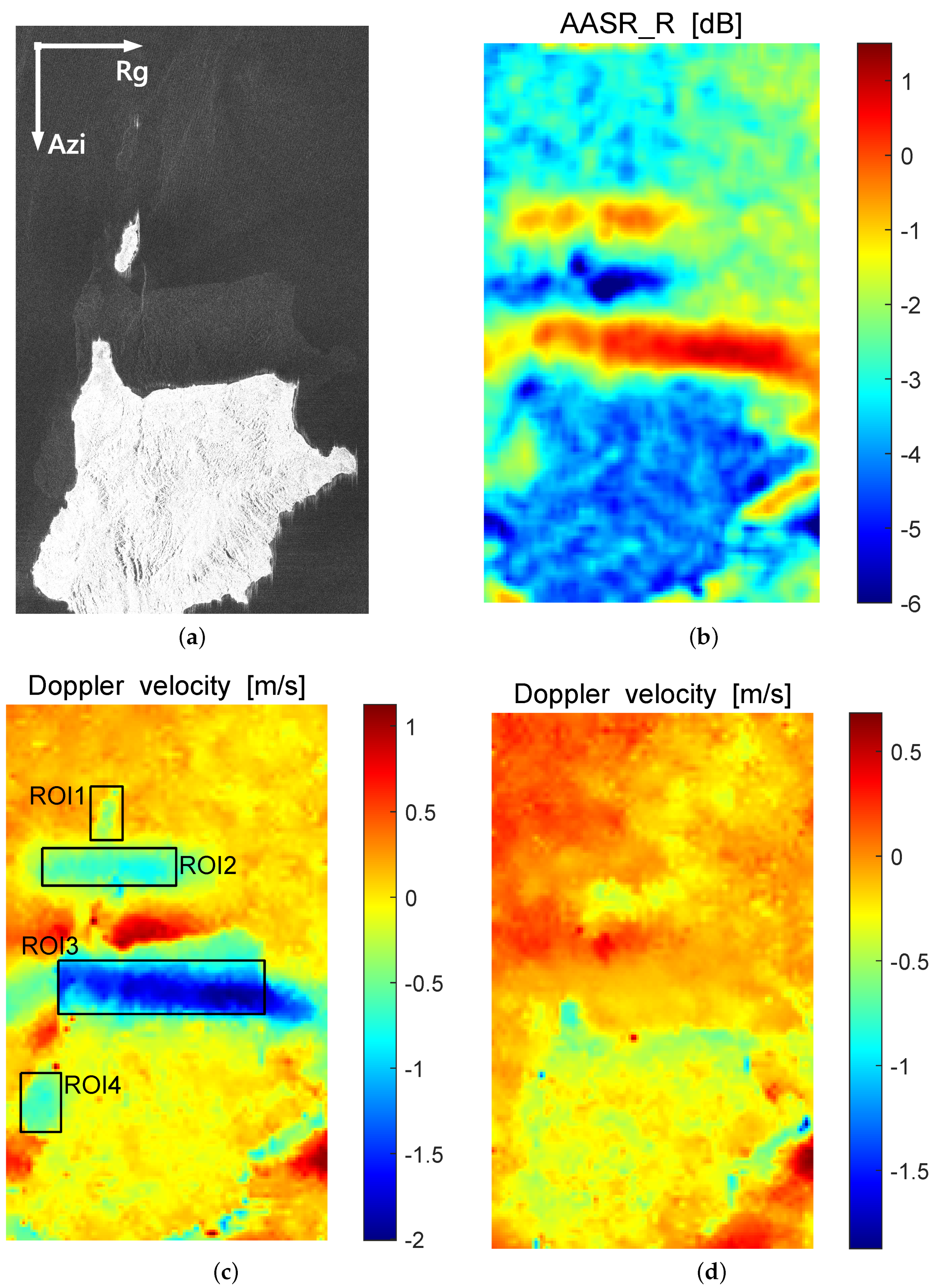
4.2.1. GF-3 SAR Data Affected by the Right Azimuth Ambiguity
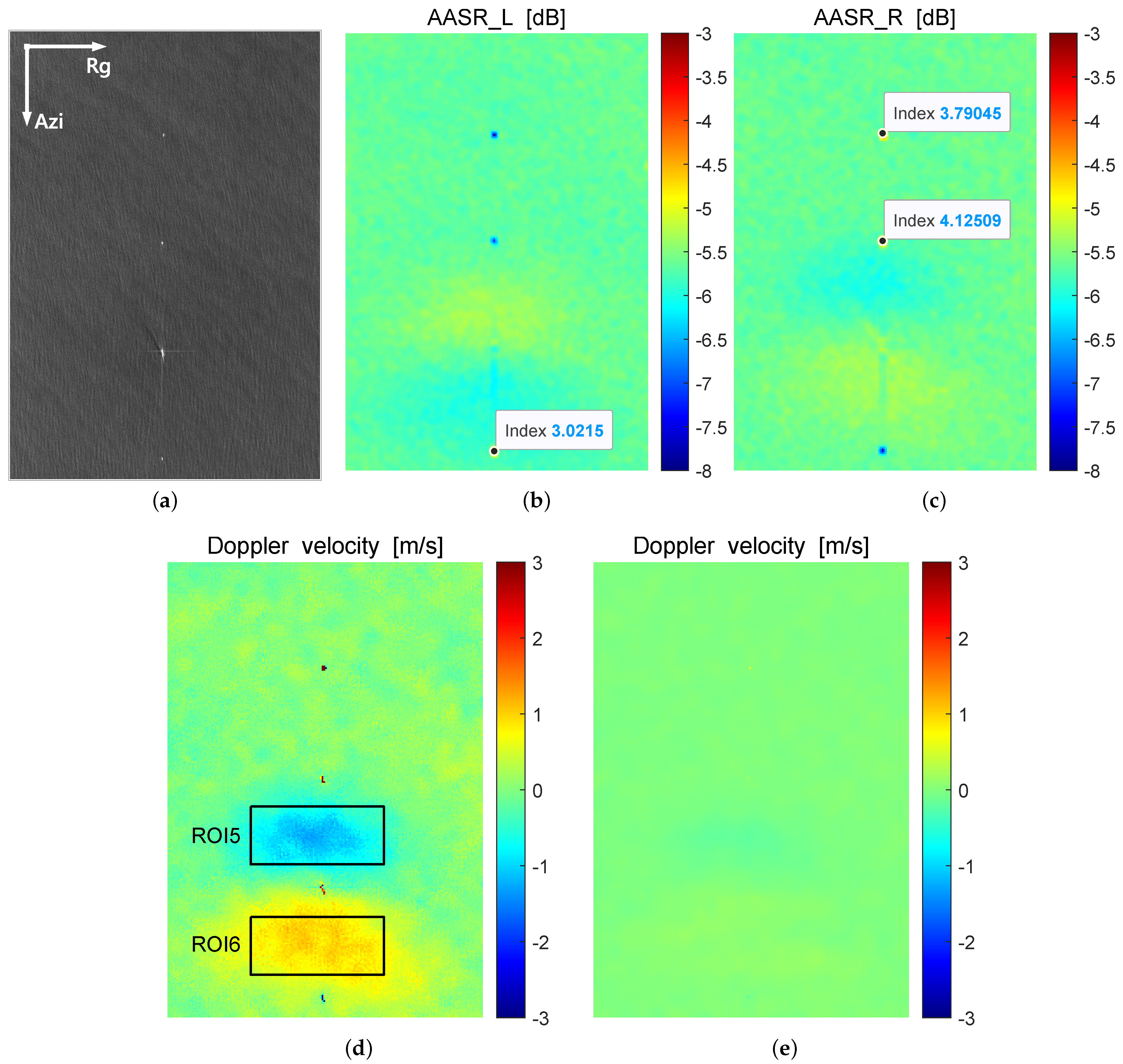
4.2.2. GF-3 SAR Data Affected by the Left and Right Azimuth Ambiguities
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chapron, B.; Collard, F.; Ardhuin, F. Direct measurements of ocean surface velocity from space: Interpretation and validation. J. Geophys. Res. 2005, 110, C07008. [Google Scholar] [CrossRef]
- Rouault, M.J.; Mouche, A.; Collard, F.; Johannessen, J.A.; Chapron, B. Mapping the Agulhas Current from space: An assessment of ASAR surface current velocities. J. Geophys. Res. 2010, 115, C10026. [Google Scholar] [CrossRef]
- Shuchman, R.; Rufenach, C.; Gonzalez, F.; Klooster, A. The feasibility of measurement of ocean current detection using SAR data. In Proceedings of the 2013 IEEE International Geoscience and Remote Sensing Symposium, Melbourne, Australia, 21–26 July 2003. [Google Scholar]
- Elyouncha, A.; Eriksson, L.E.B.; Johnsen, H. Direct Comparison of Sea Surface Velocity Estimated From Sentinel-1 and TanDEM-X SAR Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 2425–2436. [Google Scholar] [CrossRef]
- Zamparelli, V.; De Santi, F.; Cucco, A.; Zecchetto, S.; De Carolis, G.; Fornaro, G. Surface currents derived from SAR Doppler processing: An analysis over the naples coastal region in south Italy. J. Mar. Sci. Eng. 2020, 8, 203. [Google Scholar] [CrossRef]
- Moiseev, A.; Johnsen, H.; Hansen, M.; Johannessen, J. Evaluation of Radial Ocean Surface Currents Derived from Sentinel-1 IW Doppler Shift Using Coastal Radar and Lagrangian Surface Drifter Observations. J. Geophys. Res. Ocean. 2020, 125, e2019JC015743. [Google Scholar] [CrossRef]
- Moiseev, A.; Johnsen, H.; Johannessen, J.A.; Collard, F.; Guitton, G. On removal of sea state contribution to sentinel–1 doppler shift for retrieving reliable ocean surface current. J. Geophys. Res. Ocean. 2020, 125, e2020JC016288. [Google Scholar] [CrossRef]
- Hansen, M.W.; Collard, F.; Dagestad, K.F.; Johannessen, J.A.; Fabry, P.; Chapron, B. Retrieval of Sea Surface Range Velocities from Envisat ASAR Doppler Centroid Measurements. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3582–3592. [Google Scholar] [CrossRef]
- Yang, X.; He, Y. Retrieval of a Real-Time Sea Surface Vector Field from SAR Doppler Centroid: 1. Ekman Current Retrieval. J. Geophys. Res. Ocean. 2023, 128, e2022JC018657. [Google Scholar] [CrossRef]
- Elyouncha, A.; Eriksson, L.E.B.; Broström, G.; Axell, L.; Ulander, L.H.M. Joint retrieval of ocean surface wind and current vectors from satellite SAR data using a Bayesian inversion method. Remote Sens. Environ. 2021, 260, 112455. [Google Scholar] [CrossRef]
- Biron, K.; Van Wychen, W.; Vachon, P.W. Gulf stream detection from SAR Doppler anomaly. Can. J. Remote Sens. 2019, 44, 311–320. [Google Scholar] [CrossRef]
- Van Wychen, W.; Vachon, P.W.; Wolfe, J.; Biron, K. The utility of Sentinel-1 data for ocean surface feature analysis in the vicinity of the Gulf Stream. Can. J. Remote Sens. 2018, 44, 144–152. [Google Scholar] [CrossRef]
- Van Wychen, W.; Vachon, P.W.; Wolfe, J.; Biron, K. Synergistic RADARSAT-2 and Sentinel-1 SAR images for ocean feature analysis. Can. J. Remote Sens. 2019, 45, 591–602. [Google Scholar] [CrossRef]
- Moreira, A. Suppressing the azimuth ambiguities in synthetic aperture radar images. IEEE Trans. Geosci. Remote Sens. 1993, 31, 885–895. [Google Scholar] [CrossRef]
- Li, F.k.; Johnson, W.T.K. Ambiguities in Spacebornene Synthetic Aperture Radar Systems. IEEE Trans. Aerosp. Electron. Syst. 1983, 3, 389–397. [Google Scholar] [CrossRef]
- Villano, M.; Krieger, G. Spectral-Based Estimation of the Local Azimuth Ambiguity-to-Signal Ratio in SAR Images. IEEE Trans. Geosci. Remote Sens. 2014, 52, 2304–2313. [Google Scholar] [CrossRef]
- Johannessen, J.A.; Chapron, B.; Collard, F.; Kudryavtsev, V.; Mouche, A.; Akimov, D.; Dagestad, K.F. Direct ocean surface velocity measurements from space: Improved quantitative interpretation of Envisat ASAR observations. Geophys. Res. Lett. 2008, 35, L22608. [Google Scholar] [CrossRef]
- Vespe, M.; Greidanus, H. SAR Image Quality Assessment and Indicators for Vessel and Oil Spill Detection. IEEE Trans. Geosci. Remote Sens. 2012, 50, 4726–4734. [Google Scholar] [CrossRef]
- Velotto, D.; Soccorsi, M.; Lehner, S. Azimuth Ambiguities Removal for Ship Detection Using Full Polarimetric X-Band SAR Data. IEEE Trans. Geosci. Remote Sens. 2014, 52, 76–88. [Google Scholar] [CrossRef]
- Cumming, I.G. A spatially selective approach to Doppler estimation for frame-based satellite SAR processing. IEEE Trans. Geosci. Remote Sens. 2004, 42, 1135–1148. [Google Scholar] [CrossRef]
- Romeiser, R.; Johannessen, J.; Chapron, B.; Collard, F.; Kudryavtsev, V.; Runge, H.; Suchandt, S. Direct surface current field imaging from space by along-track InSAR and conventional SAR. In Oceanography from Space; Springer: Dordrecht, The Netherlands, 2010; pp. 73–91. [Google Scholar]
- Villano, M.; Krieger, G. Impact of Azimuth Ambiguities on Interferometric Performance. IEEE Geosci. Remote Sens. Lett. 2012, 9, 896–900. [Google Scholar] [CrossRef]
- Madsen, S.N. Estimating the Doppler centroid of SAR data. IEEE Trans. Aerosp. Electron. Syst. 1989, 25, 134–140. [Google Scholar] [CrossRef]
- Bamler, R. Doppler frequency estimation and the Cramer-Rao bound. IEEE Trans. Geosci. Remote Sens. 1991, 29, 385–390. [Google Scholar] [CrossRef]
- Romeiser, R.; Thompson, D.R. Numerical study on the along-track interferometric radar imaging mechanism of oceanic surface currents. IEEE Trans. Geosci. Remote Sens. 2000, 38, 446–458. [Google Scholar] [CrossRef]
- Li, X.M.; Zhang, T.; Huang, B.; Jia, T. Capabilities of Chinese Gaofen-3 Synthetic Aperture Radar in Selected Topics for Coastal and Ocean Observations. Remote Sens. 2018, 10, 1929. [Google Scholar] [CrossRef]
- Wang, H.; Wang, J.; Yang, J.; Ren, L.; Zhu, J.; Yuan, X.; Xie, C. Empirical Algorithm for Significant Wave Height Retrieval from Wave Mode Data Provided by the Chinese Satellite Gaofen-3. Remote Sens. 2018, 10, 363. [Google Scholar] [CrossRef]
- Zhao, L.; Zhang, Q.; Li, Y.; Qi, Y.; Yuan, X.; Liu, J.; Li, H. China’s gaofen-3 satellite system and its application and prospect. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 11019–11028. [Google Scholar] [CrossRef]
- Cumming, I.G.; Wong, F.H. Digital Processing of Synthetic Aperture Radar Data; Artech House: Norwood, MA, USA, 2005. [Google Scholar]
- Amadori, M.; Zamparelli, V.; De Carolis, G.; Fornaro, G.; Toffolon, M.; Bresciani, M.; Giardino, C.; De Santi, F. Monitoring Lakes Surface Water Velocity with SAR: A Feasibility Study on Lake Garda, Italy. Remote Sens. 2021, 13, 2293. [Google Scholar] [CrossRef]
- Yang, J.; Yuan, X.; Han, B.; Zhao, L.; Sun, J.; Shang, M.; Wang, X.; Ding, C. Phase Imbalance Analysis of GF-3 Along-Track InSAR Data for Ocean Current Measurement. Remote Sens. 2021, 13, 269. [Google Scholar] [CrossRef]
- Muhammad, A.I.; Anghe, A.; Datcu, M. Doppler centroid estimation for ocean surface current retrieval from Sentinel-1 SAR data. In Proceedings of the 2021 18th European Radar Conference (EuRAD), London, UK, 5–7 April 2022; IEEE: New York, NY, USA, 2022. [Google Scholar]
- Liu, L.; Datcu, M.; Zhang, Q.; Schwarz, G.; Liu, J.; Liu, Y. Direct ocean surface velocity measurement for Chinese GaoFen-3 SAR satellite. In Proceedings of the 2020 17th European Radar Conference (EuRAD), Utrecht, The Netherlands, 13–15 January 2021; IEEE: New York, NY, USA, 2021. [Google Scholar]
- Long, Y.; Zhao, F.; Zheng, M.; Jin, G.; Zhang, H. An Azimuth Ambiguity Suppression Method Based on Local Azimuth Ambiguity-to-Signal Ratio Estimation. IEEE Geosci. Remote Sens. Lett. 2020, 17, 2075–2079. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value |
|---|---|---|
| Pulse Repetition Frequency | 1000 Hz | |
| Electromagnetic Wavenumber | 118 rad/m | |
| Incidence Angle | 45 | |
| Power of Main Signal | 1 J | |
| Azimuth Ambiguity-to-Signal Ratio | −5 dB, 0 dB, 5 dB |
| MAE | RMSE | PCC | ||
|---|---|---|---|---|
| = −5 dB | BIAS | 0.05 m/s | 0.06 m/s | 0.99 |
| STD | 0.01 m/s | 0.01 m/s | 0.99 | |
| = 0 dB | BIAS | 0.13 m/s | 0.22 m/s | 0.99 |
| STD | 0.04 m/s | 0.19 m/s | 0.81 | |
| = 5 dB | BIAS | 0.12 m/s | 0.18 m/s | 0.99 |
| STD | 0.01 m/s | 0.01 m/s | 0.99 |
| AASR | Method | Bias | Standard Deviation | |||
|---|---|---|---|---|---|---|
| Theoretical Value | Measured Value | Theoretical Value | Measured Value | |||
| ROI1 | −3.03 | OE | −0.56 m/s | −0.55 m/s | 0.23 m/s | 0.20 m/s |
| CDE | −0.56 m/s | −0.54 m/s | 0.23 m/s | 0.18 m/s | ||
| ROI2 | −1.22 | OE | −0.88 m/s | −0.87 m/s | 0.22 m/s | 0.18 m/s |
| CDE | −0.88 m/s | −0.84 m/s | 0.22 m/s | 0.16 m/s | ||
| ROI3 | 0.60 | OE | −1.80 m/s | −1.85 m/s | 0.25 m/s | 0.29 m/s |
| CDE | −1.80 m/s | −1.83 m/s | 0.25 m/s | 0.27 m/s | ||
| ROI4 | −2.53 | OE | −0.50 m/s | −0.52 m/s | 0.22 m/s | 0.24 m/s |
| CDE | −0.50 m/s | −0.51 m/s | 0.22 m/s | 0.23 m/s | ||
| AASR | Method | Bias | Standard Deviation | |||
|---|---|---|---|---|---|---|
| Theoretical Value | Measured Value | Theoretical Value | Measured Value | |||
| ROI5 | −5.60 | OE | −3.00 m/s | −3.05 m/s | 0.77 m/s | 0.79 m/s |
| CDE | −3.00 m/s | −3.07 m/s | 0.77 m/s | 0.78 m/s | ||
| ROI6 | −5.66 | OE | 2.74 m/s | 2.73 m/s | 0.73 m/s | 0.78 m/s |
| CDE | 2.74 m/s | 2.75 m/s | 0.73 m/s | 0.78 m/s | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, K.; Diao, L.; Zhao, Y.; Zhao, W.; Xu, Y.; Chong, J. Impact of SAR Azimuth Ambiguities on Doppler Velocity Estimation Performance: Modeling and Analysis. Remote Sens. 2023, 15, 1198. https://doi.org/10.3390/rs15051198
Sun K, Diao L, Zhao Y, Zhao W, Xu Y, Chong J. Impact of SAR Azimuth Ambiguities on Doppler Velocity Estimation Performance: Modeling and Analysis. Remote Sensing. 2023; 15(5):1198. https://doi.org/10.3390/rs15051198
Chicago/Turabian StyleSun, Kai, Lijie Diao, Yawei Zhao, Wenjia Zhao, Yongsheng Xu, and Jinsong Chong. 2023. "Impact of SAR Azimuth Ambiguities on Doppler Velocity Estimation Performance: Modeling and Analysis" Remote Sensing 15, no. 5: 1198. https://doi.org/10.3390/rs15051198
APA StyleSun, K., Diao, L., Zhao, Y., Zhao, W., Xu, Y., & Chong, J. (2023). Impact of SAR Azimuth Ambiguities on Doppler Velocity Estimation Performance: Modeling and Analysis. Remote Sensing, 15(5), 1198. https://doi.org/10.3390/rs15051198