

Integration of Remote-Sensing Techniques for the Preventive Conservation of Paleolithic Cave Art in the Karst of the Altamira Cave

 , , ,
, , , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
2.1. Global Navigation Satellite System (GNSS)
2.2. 3D Terrestrial Laser Scanning
- Length: 296.5 m (20 longer)
- Area: 11,390.9 m2
- Volume: 9372.7 m3
2.3. Unmanned Aerial Vehicle
2.4. Ground-Penetrating Radar
2.4.1. Field Data Acquisition
- -
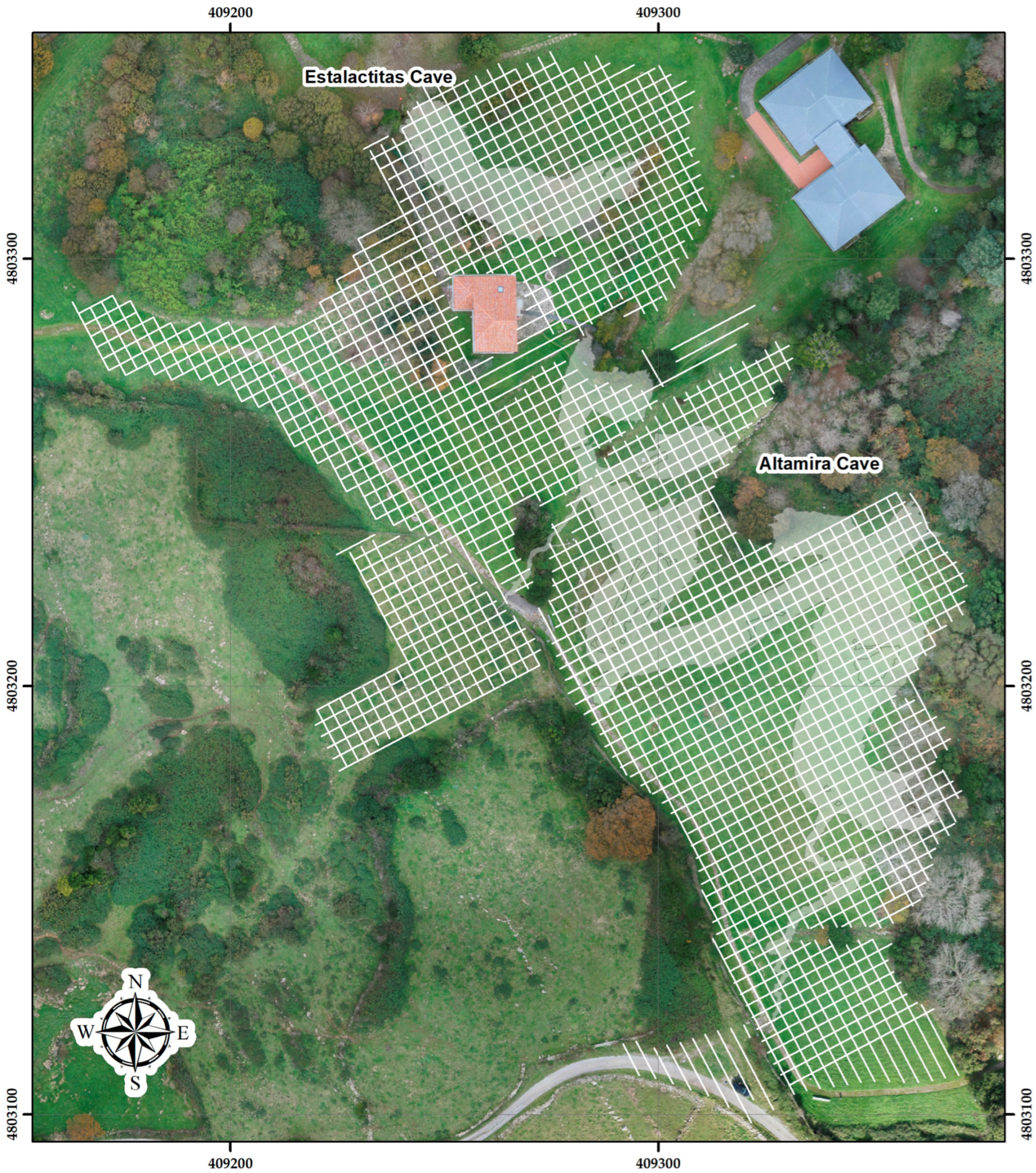
- In order to pinpoint discontinuities and karst structures in deep layers, a 100 MHz nominal center frequency antenna was used for the area in and around Altamira Cave. The 100 MHz antenna was able to penetrate to depths of about 10 m in the study area, and a centimeter resolution could be achieved [63,64]. The design of the GPR profile grid mainly took into account the dimensions and directionalities of a series of karst structures and faults, in some cases extending over more than half a kilometer, mapped in previous studies in the Altamira Cave area [65,66]. Therefore, a profile grid for GPR data acquisition was designed with equidistant 2D orthogonal lines, spaced every 3 m, with respect to a longitudinal axis that was, in turn, perpendicular to the main fracture directions in the Altamira Cave area, as described in these previous studies. Every 2D profile line was topographically georeferenced by GNSS (Figure 5 and Figure 6).
- -
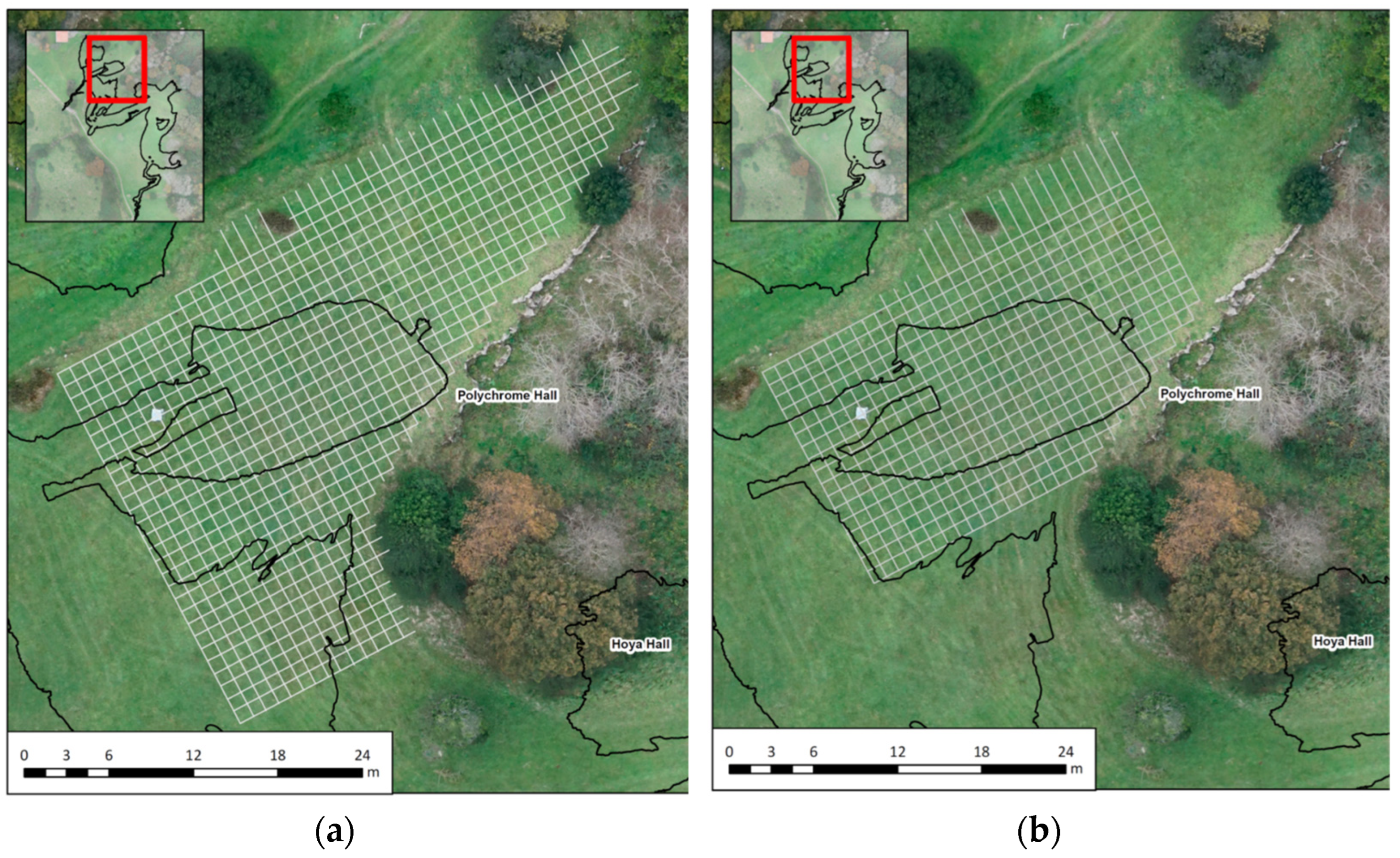
- Due to the importance of the cave paintings on the Polychrome Hall ceiling for the Cave of Altamira, it was considered necessary to study the first meters of its overlying rock strata and its lapiés area in greater detail and at a higher resolution. Two GPR profile grids were planned in the Polychrome Hall area:
- ○
- A profile grid for the study of its strata in the first meters using a 400 MHz nominal center frequency antenna to identify discontinuities and karst structures. The 400 MHz antenna was able to penetrate to depths of about 4 m in the study area, with centimeter resolution [67].
- ○
- A profile grid for the study of its lapiés zone using a 900 MHz nominal center frequency antenna to define the lapiés groove system. The 900 MHz antenna was able to penetrate to depths of about 1.5 m in the study area with a centimeter resolution [68].
2.4.2. Data Processing
Velocity Estimation
Selected Processing Flow
3. Results
3.1. Integration of UAV and 3DTLS
3.2. Intregration of UAV and GPR
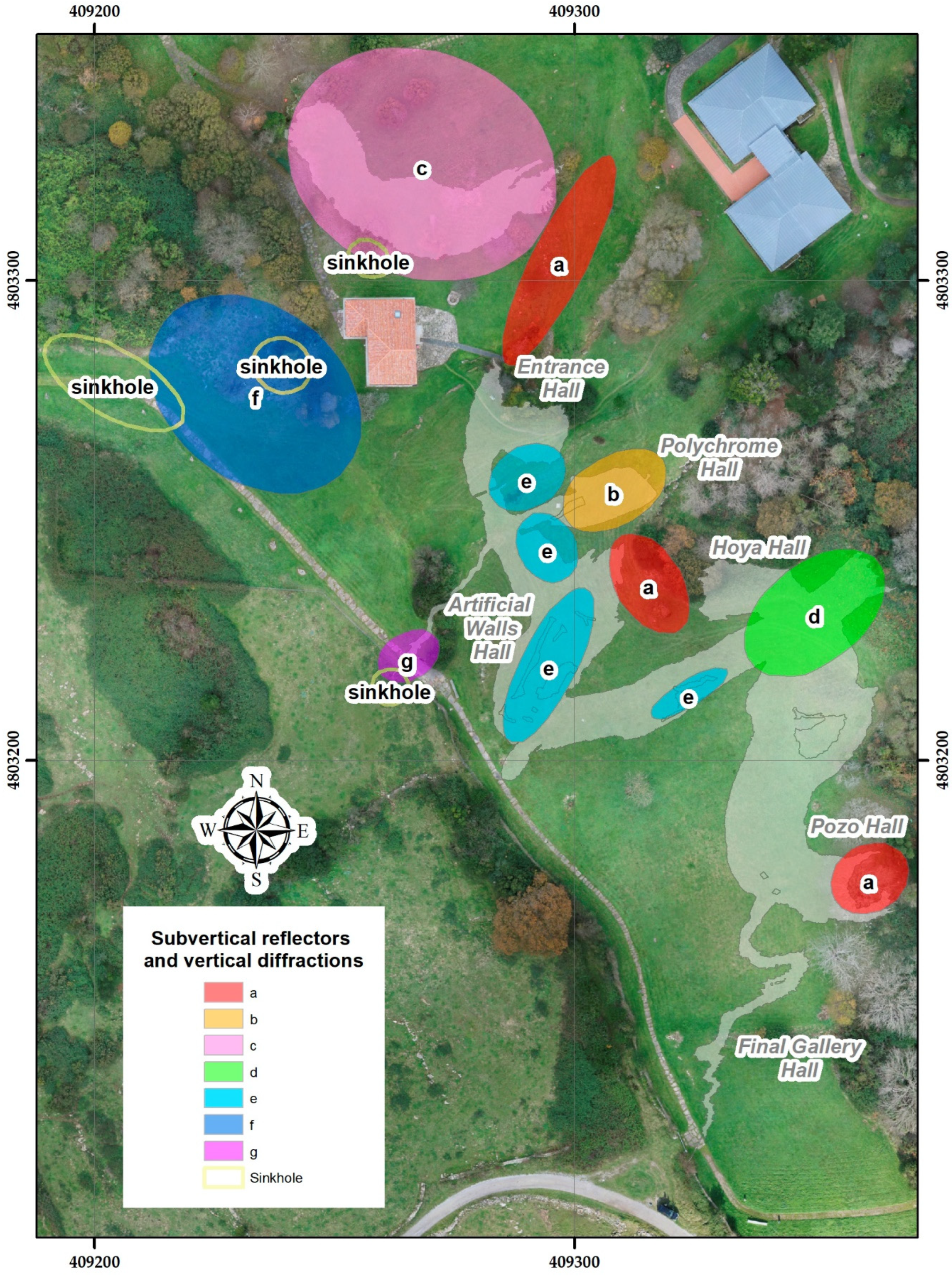
3.2.1. Results from the Overlying Layer of the Altamira Cave Site Derived from the 100 MHz Antenna
- The surrounding sinkholes (cave entrance, areas of Hoya Hall and El Pozo).
- The Polychrome Hall.
- The Stalactites Cave.
- The Hoya Hall.
- The artificial walls.
- An area to the NW where a house and a cowshed with its dunghill were located.
- The end zone of the westernmost branch line.
- To the northwest of the Altamira Cave, specifically on the road to the south of the Museum building and where buildings and constructions demolished (house, bar, stable, and a dunghill) were located.
- In the end zone of the westernmost branch line of Altamira Cave.
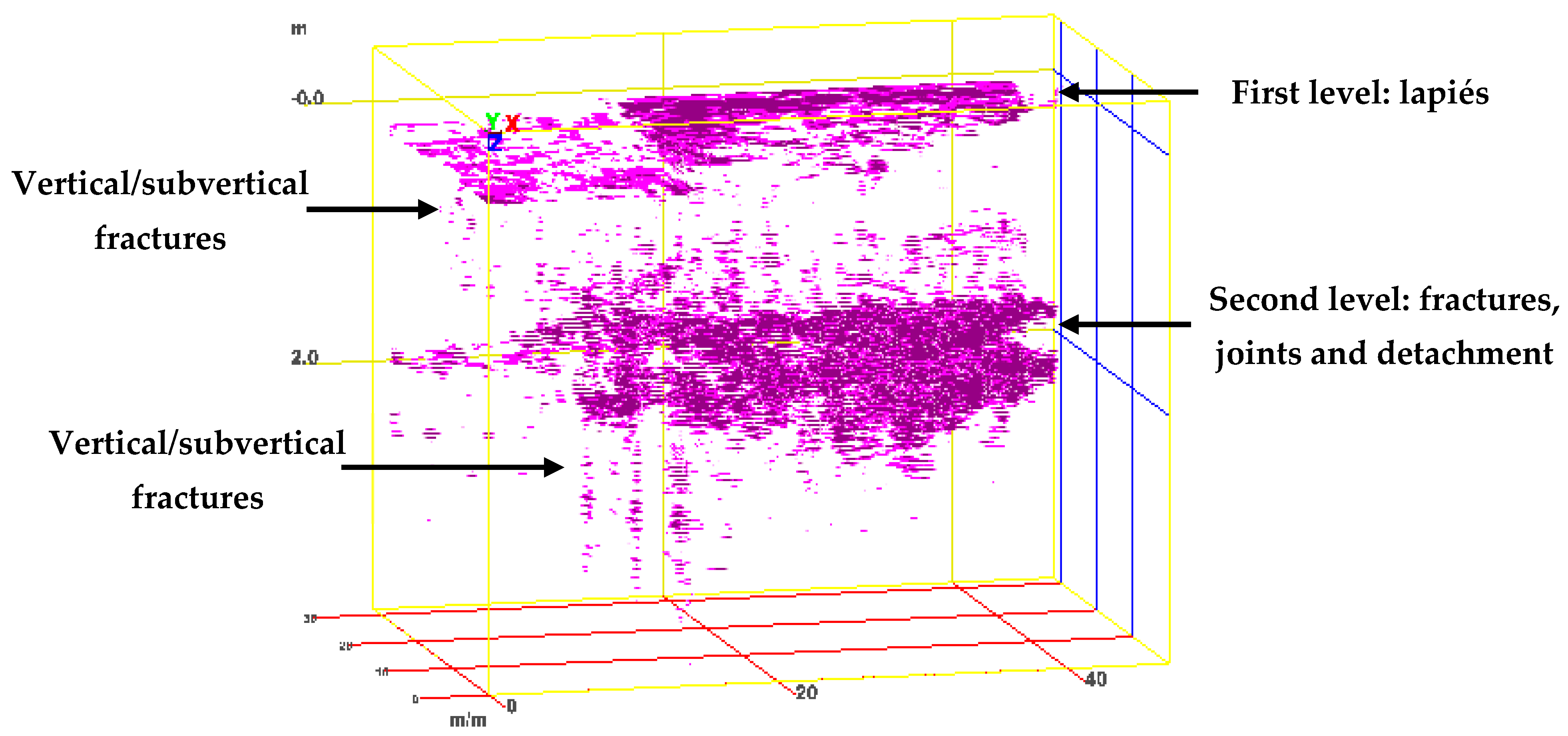
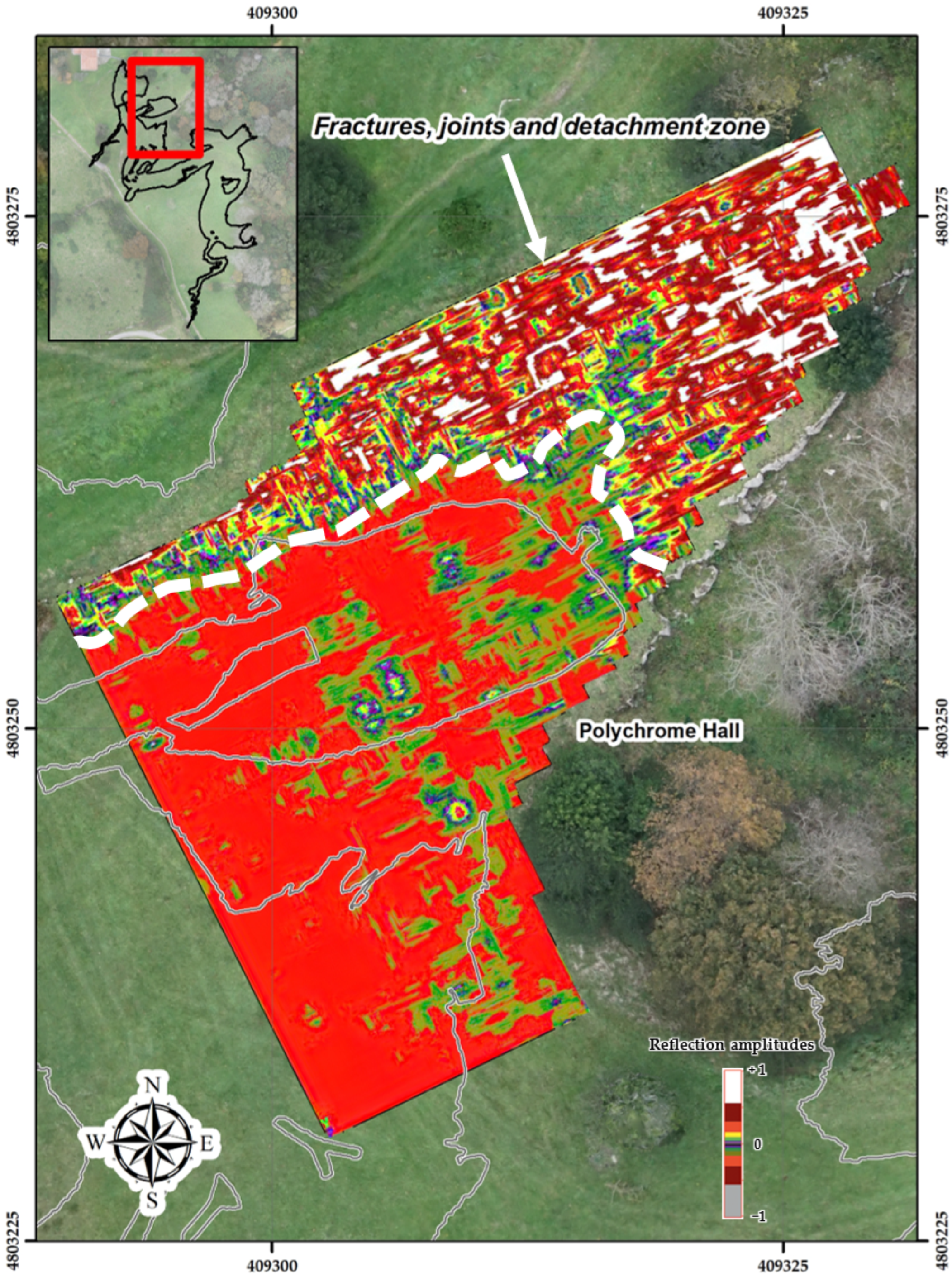
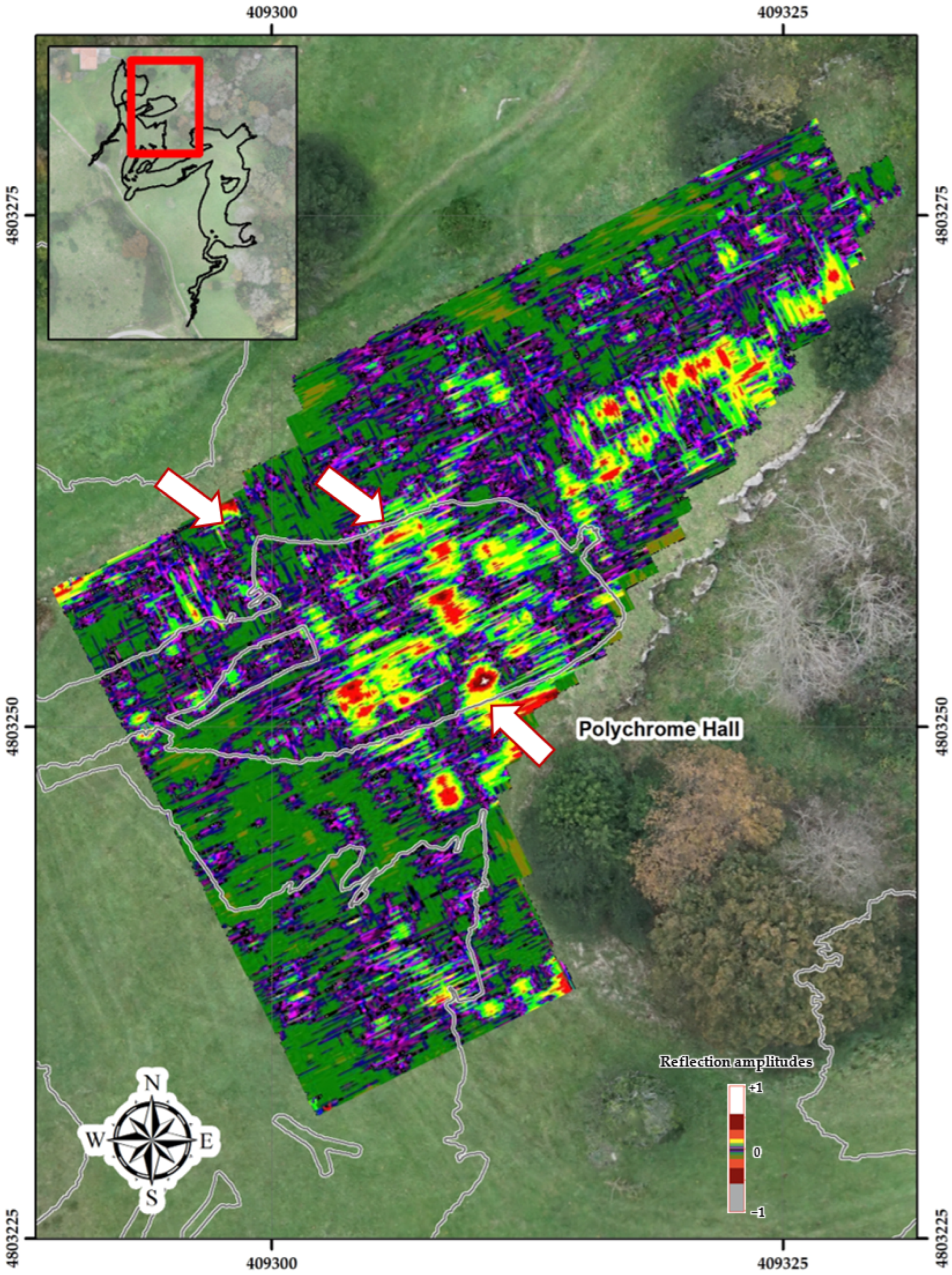
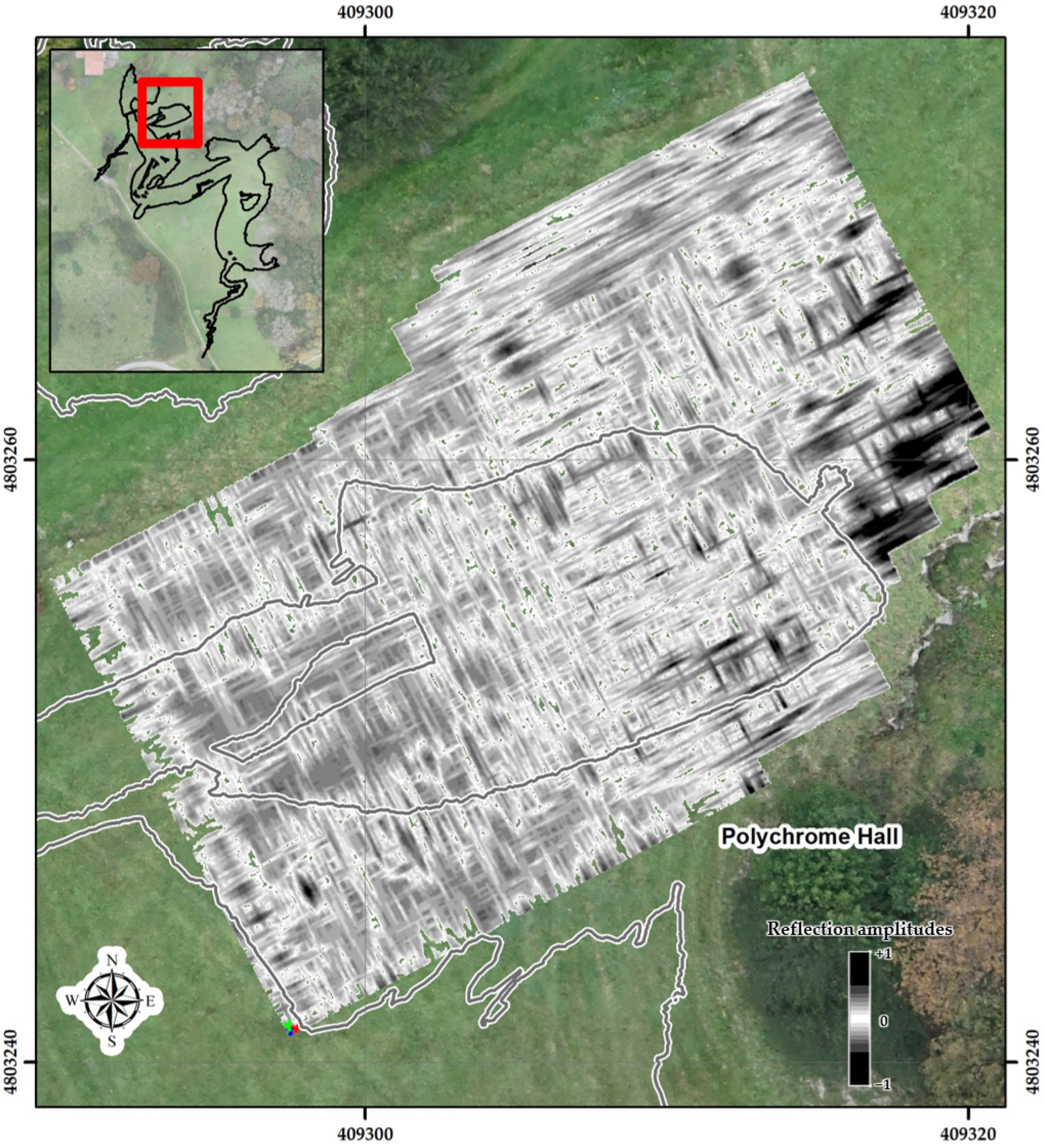
3.2.2. Results from the Overlying Layer of the Polychrome Hall Derived from the 400 MHz and 900 MHz Antennae
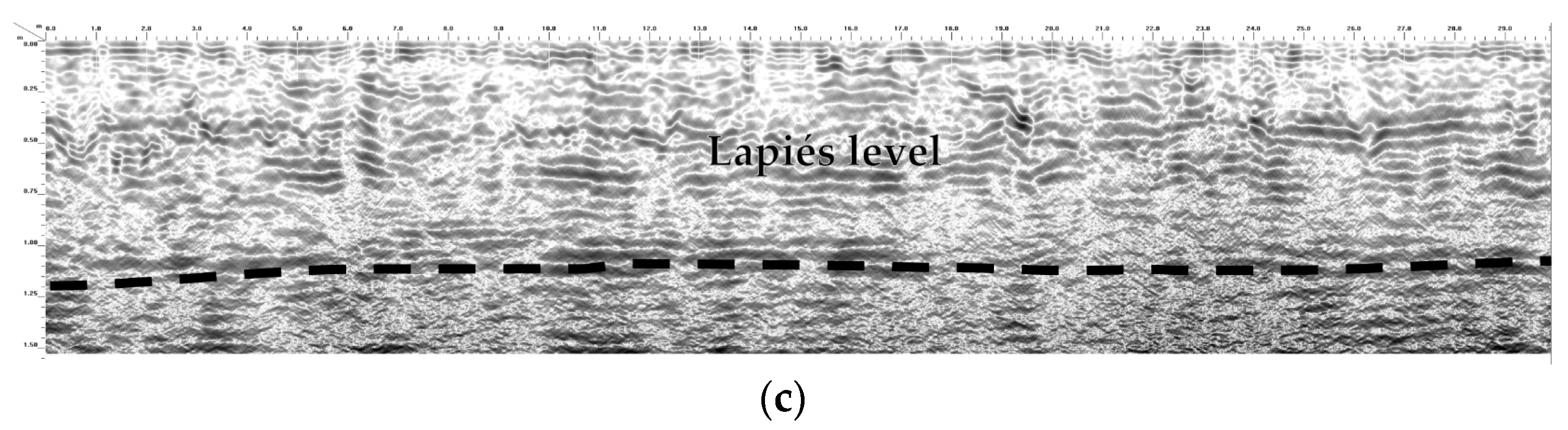
- A first level from the surface to a depth of about 1.20 m, which corresponds to the lapiés zone.
- A second level located in a variable interval between 1.70 m and 2.80 m depth, which may correspond mainly to the existence of fractures, joints, and an extended zone of detachments.
- ○
- the decision at the beginning of the 20th century to construct the artificial walls to the north and east of the Polychrome Hall, or
- ○
- the current topography of the surface above Polychrome Hall, reflecting a change in orientation and slope that tilts towards the NE on the surface, which coincides with the surface projection of this detected level of high amplitude reflectors (Figure 16), or
- ○
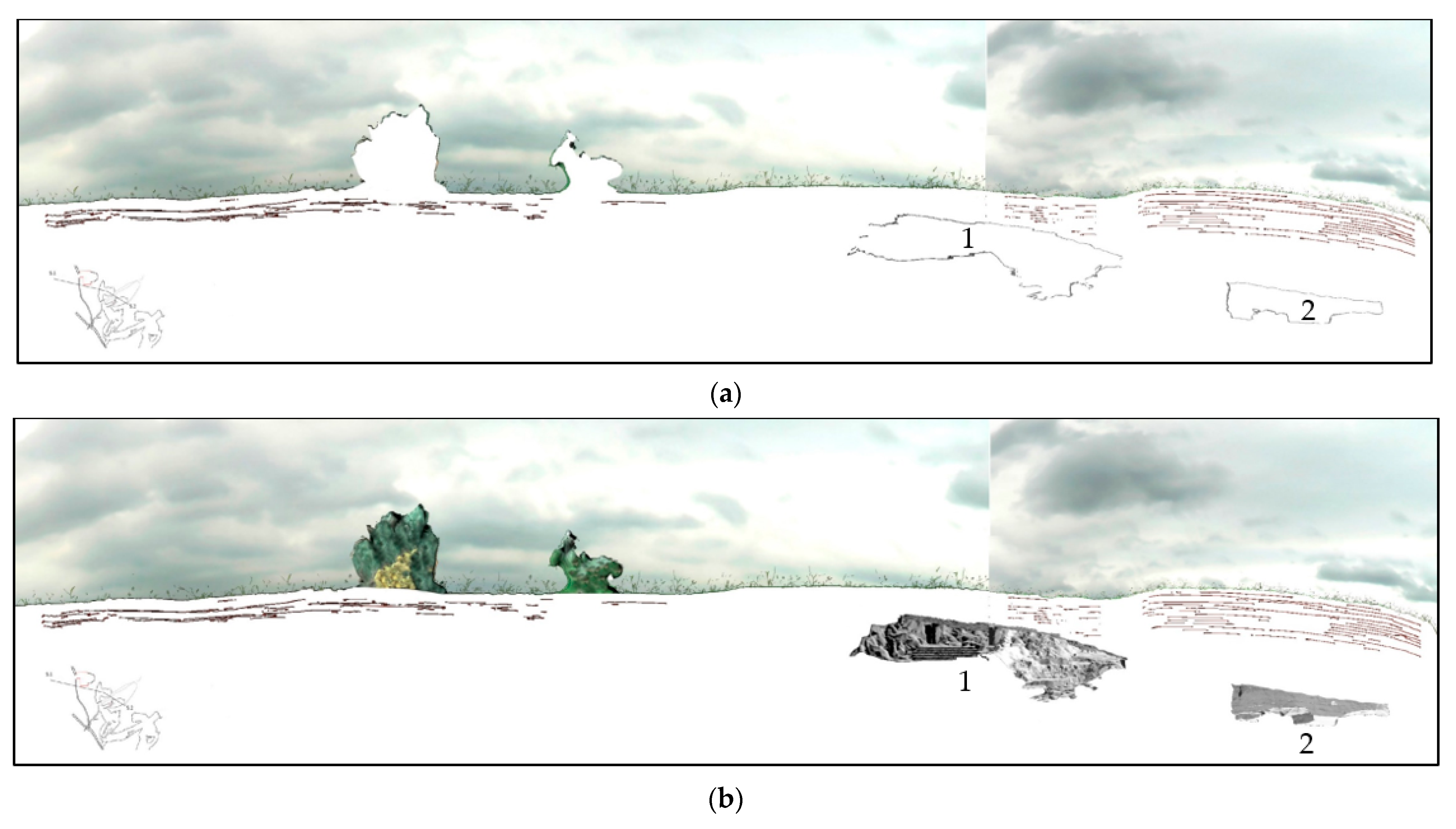
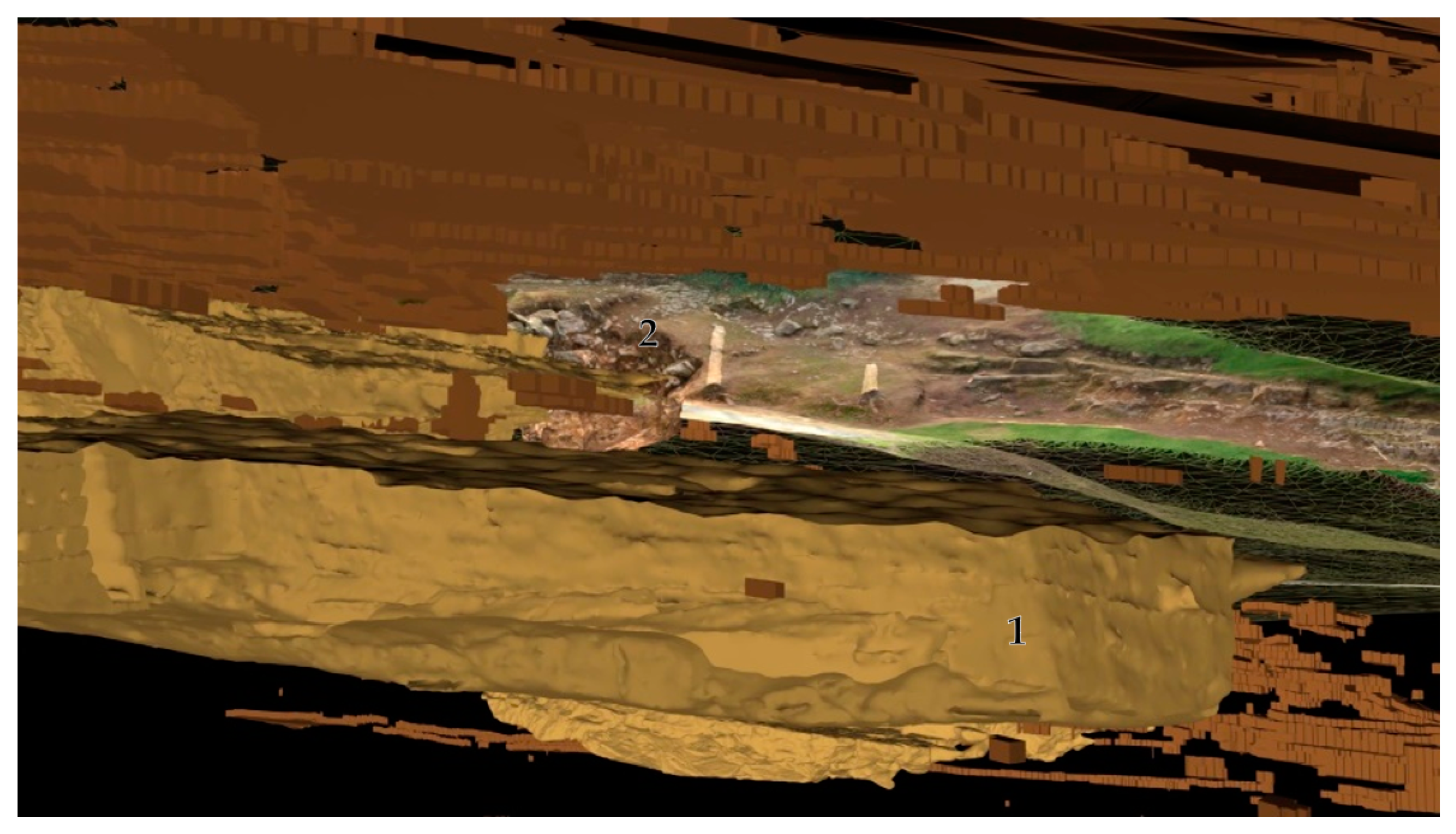
3.3. Visualization of the Integration of UAV, 3DTLS, and GPR
4. Discussion
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Cabrelles, M.; Lerma, J.L.; Villaverde, V. Macro Photogrammetry & Surface Features Extraction for Paleolithic Portable Art Documentation. Appl. Sci. 2020, 10, 6908. [Google Scholar] [CrossRef]
- Porter, S.T.; Huber, N.; Hoyer, C.; Floss, H. Portable and low-cost solutions to the imaging of Paleolithic art objects: A comparison of photogrammetry and reflectance transformation imaging. J. Archaeol. Sci. Rep. 2016, 10, 859–863. [Google Scholar] [CrossRef]
- Díaz-Guardamino, M.; García, L.; Wheatley, D.; Rodríguez, V. RTI and the study of engraved rock art: A re-examination of the Iberian south-western stelae of Setefilla and Almadén de la Plata 2 (Seville, Spain). Digit. Appl.Archaeol. Cult. Herit. 2015, 2, 41–54. [Google Scholar] [CrossRef]
- Ontañón, R.; Bayarri, V.; Castillo, E.; Montes, R.; Morlote, J.M.; Muñoz, E.; Palacio, E. New discoveries of pre-Magdalenian cave art in the central area of the Cantabrian region (Spain). J. Archaeol. Sci. Rep. 2019, 28, 102020. [Google Scholar] [CrossRef]
- Mendoza, M.A.D.; De La Hoz Franco, E.; Gómez, J.E.G. Technologies for the Preservation of Cultural Heritage—A Systematic Review of the Literature. Sustainability 2023, 15, 1059. [Google Scholar] [CrossRef]
- Cecotti, H. Cultural Heritage in Fully Immersive Virtual Reality. Virtual Worlds 2022, 1, 82–102. [Google Scholar] [CrossRef]
- Zhang, X.; Yang, D.; Yow, C.H.; Huang, L.; Wu, X.; Huang, X.; Guo, J.; Zhou, S.; Cai, Y. Metaverse for Cultural Heritages. Electronics 2022, 11, 3730. [Google Scholar] [CrossRef]
- Boutsi, A.-M.; Ioannidis, C.; Soile, S. Interactive online visualization of complex 3D geometries. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, XLII-2/W9, 173–180. [Google Scholar] [CrossRef]
- Barrera, S.; Otaola, A.; Bayarri-Cayón, V. Explotación Turística no Intrusita de la Cueva de Santimamiñe (Vizcaya) Mediante Realidad Virtual. In II Congreso Español de Cuevas Turísticas; Asociación de Cuevas Turísticas Española: Madrid, Spain, 2009; pp. 359–371. [Google Scholar]
- Domingo, I.; Chieli, A. Characterizing the pigments and paints of prehistoric artists. Archaeol. Anthropol. Sci. 2021, 13, 196. [Google Scholar] [CrossRef]
- Bayarri, V.; Sebastián, M.A.; Ripoll, S. Hyperspectral Imaging Techniques for the Study, Conservation and Management of Rock Art. Appl. Sci. 2019, 9, 5011. [Google Scholar] [CrossRef]
- Bayarri, V.; Castillo, E.; Ripoll, S.; Sebastián, M.A. Improved Application of Hyperspectral Analysis to Rock Art Panels from El Castillo Cave (Spain). Appl. Sci. 2021, 11, 1292. [Google Scholar] [CrossRef]
- Rahkonen, S.; Lind, L.; Raita-Hakola, A.-M.; Kiiskinen, S.; Pölönen, I. Reflectance Measurement Method Based on Sensor Fusion of Frame-Based Hyperspectral Imager and Time-of-Flight Depth Camera. Sensors 2022, 22, 8668. [Google Scholar] [CrossRef] [PubMed]
- Groom, K.M. 3.25-Field Assessment in Rock Art and Cultural Stone Decay. In Treatise on Geomorphology, 2nd ed.; Academic Press: Cambridge, MA, USA, 2022; pp. 480–511. ISBN 9780128182352. [Google Scholar] [CrossRef]
- Bayarri, V.; Latova, J.; Castillo, E.; Lasheras, J.A.; De Las Heras, C.; Prada, A. Nueva documentación y estudio del arte empleando técnicas hiperespectrales en la Cueva de Altamira. ARKEOS | perspectivas em diálogo, nº 37. In XIX Interna-tional Rock Art Conference IFRAO 2015. Symbols in the Landscape: Rock Art and Its Context. Conference Proceedings; Instituto Terra e Memória: Tomar, Portugal, 2015; ISBN 978-84-9852-463-. [Google Scholar]
- Ripoll, S.; Bayarri, V.; Muñoz, F.J.; Ortega, R.; Castillo, E.; Latova, J.; Herrera, J.; Moreno-Salinas, D.; Martín, I. Hands Stencils in El Castillo Cave (Puente Viesgo, Cantabria, Spain). An Interdisciplinary Study. In Proceedings of the Prehistoric Society; Cambridge University Press: Cambridge, UK, 2021; pp. 1–21. [Google Scholar]
- Lafon-Pham, D.; Konik, S.; Monney, J. On-site spectroradiometric analysis of Palaeolithic cave art: Investigating colour variability in the red rock art of Points cave (France). J. Archaeol. Sci. Rep. 2022, 42, 103384. [Google Scholar] [CrossRef]
- Bayarri, V. Algoritmos de Análisis de Imágenes Multiespectrales e Hiperespectrales para la Documentación e Interpretación del Arte Rupestre. Ph.D Thesis, Universidad Nacional de Educación a Distancia, Madrid, Spain, May 2020. Available online: http://e-spacio.uned.es/fez/view/tesisuned:ED-Pg-TecInd-Vbayarri (accessed on 25 January 2021).
- Ripoll, S.; Bayarri, V.; Muñoz, F.J.; Latova, J.; Gutiérrez, R.; Pecci, H. El arte rupestre de la cueva de El Castillo (Puente Viesgo, Cantabria): Unas reflexiones metodológicas y una propuesta cronológica. In Capítulo en Libro Cien Años de Arte Rupestre Paleolítico Centenario del Descubrimiento de la Cueva de la Peña de Candamo (1914–2014); Ediciones Universidad de Salamanca: Salamanca, Spain, 2014; ISBN 978-84-9012-480-2. [Google Scholar]
- Sciuto, C.; Cantini, F.; Chapoulie, R.; Cou, C.; De la Codre, H.; Gattiglia, G.; Granier, X.; Mounier, A.; Palleschi, V.; Sorrentino, G.; et al. What Lies Beyond Sight? Applications of Ultraportable Hyperspectral Imaging (VIS-NIR) for Archaeological Fieldwork. J. Field Archaeol. 2022, 47, 522–535. [Google Scholar] [CrossRef]
- Ontañon, R.; Bayarri, V.; Herrera, J.; Gutierrez, R. The conservation of prehistoric caves in Cantabria, Spain. In The Con-servation of Subterranean Cultural Heritage; CRC Press/Balkema: Boca Raton, FL, USA; Taylor & Francis Group: London, UK, 2014; ISBN1 978-1-138-02694-0 (Hbk). ISBN2 978-1-315-73997-7. [Google Scholar]
- Martín-Béjar, S.; Claver, J.; Sebastián, M.A.; Sevilla, L. Graphic Applications of Unmanned Aerial Vehicles (UAVs) in the Study of Industrial Heritage Assets. Appl. Sci. 2020, 10, 8821. [Google Scholar] [CrossRef]
- Raimundo, J.; Lopez-Cuervo Medina, S.; Prieto, J.F.; Aguirre de Mata, J. Super Resolution Infrared Thermal Imaging Using Pansharpening Algorithms: Quantitative Assessment and Application to UAV Thermal Imaging. Sensors 2021, 21, 1265. [Google Scholar] [CrossRef]
- Cartailhac, É. Les cavernes ornées de dessins: La grotte d’Altamira, Espagne. "Mea culpa" d’un sceptique. L’Anthropologie 1902, 13, 348–354. [Google Scholar]
- Cartailhac, É.; Breuil, H. La Caverne d´Altamira á Santillane près Santander (Espagne); Imprimerie de Mónaco: Monaco, Mónaco, 1906. [Google Scholar]
- Hoyos, M. Procesos de alteración de soporte y pintura en diferentes cuevas con arte rupestre del norte de España: Santi-mamiñe, Arenaza, Altamira y Llonín. In La Protección y Conservación del Arte Rupestre Paleolítico; Mesa redonda hispano-francesa [Colombres-Asturias: 3 a 6 de junio de 1991]; Consejería de Educación, Cultura, Deportes y Juventud del Principado de Asturias: Asturias, Spain, 1992; pp. 51–74. [Google Scholar]
- Lasheras, J.A.; De La Heras, C.; Prada, A.; Dohijo, E. Altamira y su futuro. In The Conservation of Subterranean Cultural Her-itage; CRC Press/Balkema: Boca Raton, FL, USA; Taylor & Francis Group: London, UK, 2014; ISBN1 978-1-138-02694-0 (Hbk). ISBN2 ISBN 978-1-315-73997-7. [Google Scholar]
- Sánchez-Moral, S. Estudio integral del estado de conservación de la Cueva de Altamira y su arte paleolítico (2007–2009). Perspectivas futuras de conservación. In Monografías del Museo Nacional y Centro de Investigación de Altamira, no. 24; Ministerio de Educación, Cultura y Deporte: Madrid, Spain, 2014. [Google Scholar]
- Bayarri-Cayón, V.; Castillo, E. Caracterización geométrica de elementos complejos mediante la integración de diferentes técnicas geomáticas. Resultados obtenidos en diferentes cuevas de la Cornisa Cantábrica. In Proceedings of the VIII Semana Geomática Internacional, Barcelona, Spain, 3–5 March 2009. [Google Scholar]
- Strang, G.; Kai, B. Linear Algebra, Geodesy and GPS; Wellesley Cambridge Press: Wellesley, MA, USA, 1997. [Google Scholar]
- TOPCON. Topcon Hyper II GNSS Receiver Specifications. Available online: https://topconcare.com/en/hardware/gnss-receivers/hiper-ii/specifications/ (accessed on 7 February 2023).
- TOPCON. Topcon Tools 8. Technical Datasheet. Available online: https://topconcare.com/en/software/office-applications/topcon-tools-8/ (accessed on 7 February 2023).
- Leick, A.; Rapoport, L.; Tatarnikov, D. GPS Satellite Surveying, 4th ed.; John Wiley & Sons: New York, NY, USA, 2015. [Google Scholar]
- Teunissen, P.; Khodabandeh, A. Review and principles of PPP-RTK methods. J. Geod. 2015, 89, 217–240. [Google Scholar] [CrossRef]
- TOPCON. Topcon GPT. Available online: https://topconcare.com/en/hardware/optical/gpt-series-total-stations/ (accessed on 7 February 2023).
- FARO. FARO Laser Scanner Focus 3D X 130 Technical Datasheet. Available online: https://downloads.faro.com/index.php/s/XYSMR89BwyD5fqg?dir=undefined&openfile=41913 (accessed on 8 February 2023).
- Bayarri, V.; Castillo, E.; Ripoll, S.; Sebastián, M.A. Control of Laser Scanner Trilateration Networks for Accurate Georef-erencing of Caves: Application to El Castillo Cave (Spain). Sustainability 2021, 13, 13526. [Google Scholar] [CrossRef]
- Mancini, F.; Dubbini, M.; Gattelli, M.; Stecchi, F.; Fabbri, S.; Gabbianelli, G. Using Unmanned Aerial Vehicles (UAV) for High-Resolution Reconstruction of Topography: The Structure from Motion Approach on Coastal Environments. Remote Sens. 2013, 5, 6880–6898. [Google Scholar] [CrossRef]
- Kyriou, A.; Nikolakopoulos, K.G.; Koukouvelas, I.K. Timely and Low-Cost Remote Sensing Practices for the Assessment of Landslide Activity in the Service of Hazard Management. Remote Sens. 2022, 14, 4745. [Google Scholar] [CrossRef]
- Kovanič, Ľ.; Blistan, P.; Štroner, M.; Urban, R.; Blistanova, M. Suitability of Aerial Photogrammetry for Dump Documentation and Volume Determination in Large Areas. Appl. Sci. 2021, 11, 6564. [Google Scholar] [CrossRef]
- TOPCON. TOPCON Intel Falcon 8+ Drone. Technical Datasheet. Available online: https://www.topconpositioning.com/sites/default/files/product_files/falcon_8_plus_datasheet_7010_2243_reva_sm_4.pdf (accessed on 9 December 2022).
- SONY. Sony A7 R Mark ii. Available online: https://www.sony.com/electronics/support/res/manuals/W000/W0005150M.pdf (accessed on 9 December 2022).
- Neal, A. Ground-penetrating radar and its use in sedimentology: Principles, problems and progress. Earth Sci. Rev. 2004, 66, 261–330. [Google Scholar] [CrossRef]
- Theune, U.; Rokosh, D.; Sacchi, M.; Schmitt, D. Mapping fractures with GPR: A case study from Turtle Mountain. Geophysics 2006, 71, B139–B150. [Google Scholar] [CrossRef]
- Rashed, M.; Kawamura, D.; Nemoto, H.; Miyata, T.; Nakagawa, K. Ground penetrating radar investigations across the Uemachi fault, Osaka, Japan. J. Appl. Geophys. 2003, 53, 63–75. [Google Scholar] [CrossRef]
- Davis, J.; Annan, A. Ground-penetrating radar for high-resolution mapping of soil and rock stratigraphy. Geophys. Prospect. 1989, 37, 531–551. [Google Scholar] [CrossRef]
- Ferrero, A.; Godio, A.; Sambuelli, L. Geophysical and Geomechanical Investigations Applied to the Rock Mass Charac-terisation for Distinct Element Modelling. Rock Mech. Rock Eng. 2007, 40, 603–622. [Google Scholar] [CrossRef]
- Uriarte, J.A.; Damas Molla, L.; Sagarna, M.; Aranburu, A.; García, F.; Antiguedad, I.; Morales, T. Characterization of complex groundwater flows in the environment of singular buildings by combining hydrogeological and non-destructive geophysical (ground-penetrating radar) techniques: Punta Begona Galleries (Getxo, Spain). Hydrol. Process. 2020, 34, 1004–1015. [Google Scholar] [CrossRef]
- Lunt, I.A.; Hubbard, S.S.; Rubin, Y. Soil moisture content estimation using ground-penetrating radar reflection data. J. Hydrol. 2005, 307, 254–269. [Google Scholar] [CrossRef]
- Longoni, L.; Arosio, D.; Scaioni, M.; Papini, M.; Zanzi, L.; Roncella, R.; Brambilla, D. Surface and subsurface non-invasive investigations to improve the characterization of a fractured rock mass. J. Geophys. Eng. 2012, 9, 461–472. [Google Scholar] [CrossRef]
- Grodner, M. Delination of rockburst fractures with ground penetrating radar in the Witwatersrand Basin, South Africa. Int. J. Rock Mech. 2001, 38, 885–891. [Google Scholar] [CrossRef]
- Pipan, M.; Baradello, L.; Forte, E.; Prizzon, A. GPR study of bedding planes, fractures and cavities in limestone. In Proceedings of the 8th International Conference on Ground Penetrating Radar, Gold Coast, Australia, 23–26 May 2000. [Google Scholar] [CrossRef]
- Neal, A.; Grasmueck, M.; McNeill, D.F.; Viggiano, D.A.; Eberli, G.P. Full-Resolution 3D Radar Stratigraphy of Complex Oolitic Sedimentary Architecture: Miami Limestone, Florida, U.S.A. J. Sediment. Res. 2008, 78, 638–653. [Google Scholar] [CrossRef]
- Jeannin, M.; Garambois, S.; Grégoire, C.; Jongmans, D. Multiconfiguration GPR measurements for geometric fracture characterization in limestone cliffs (Alps). Geophysics 2006, 71, B85–B92. [Google Scholar] [CrossRef]
- Chalikakis, K.; Plagnes, V.; Guerin, R.; Valois, R.; Bosch, F.P. Contribution of geophysical methods to karst-system ex-ploration: An overview. Hydrogeol. J. 2011, 19, 1169–1180. [Google Scholar] [CrossRef]
- Grasmueck, M.; Quintà, M.C.; Pomar, K.; Eberli, G.P. Diffraction imaging of subvertical fractures and karst with full-resolution 3D Ground-Penetrating Radar. Geophys. Prospect. 2013, 61, 907–918. [Google Scholar] [CrossRef]
- Fernandes, A.L.; Medeiros, W.E.; Bezerra, F.H.R.; Oliveira, J.G.; Cazarin, C.L. GPR investigation of karst guided by com-parison with outcrop and unmanned aerial vehicle imagery. J. Appl. Geophys. 2015, 112, 268–278. [Google Scholar] [CrossRef]
- Pueyo-Anchuela, O.; Casas-Sainz, A.M.; Soriano, M.A.; Pocoví-Juan, A. A geophysical survey routine for the detection of doline areas in the surroundings of Zaragoza (NE Spain). Eng. Geol. 2010, 114, 382–396. [Google Scholar] [CrossRef]
- Medeiros, W.E.; Oliveira, J.G.; de Santana, F.; Bezerra, F.; Cazarin, C. Enhancing Stratigraphic and Structural Features in GPR Images of Limestone Karst through Adequate Data Processing. In Proceedings of the 24th European Meeting of Environmental and Engineering Geophysic, Porto, Portugal, 9–12 September 2018. [Google Scholar] [CrossRef]
- Bermejo, L.; Ortega, A.I.; Parés, J.M.; Campaña, I.; Bermúdez de Castro, J.M.; Carbonell, E.; Conyers, L.B. Karst features interpretation using ground-penetrating radar: A case study from the Sierra de Atapuerca, Spain. Geomorphology 2020, 367, 107311. [Google Scholar] [CrossRef]
- Conyers, L.B. Ground-Penetrating Radar for Archaeology, 3rd ed.; Rowman and Littlefield Publishers: Lanham, MD, USA; Alta Mira Press: Lanham, MD, USA, 2013; p. 241. [Google Scholar]
- Daniels, D.J. Ground Penetrating Radar, 2nd ed.; IEE Radar, Sonar and Navigation Series 15 ed. The Institution of Elec-trical Engineers: London, UK, 2004; p. 752. [Google Scholar] [CrossRef]
- Jol, H.M. Ground penetrating radar antennae frequencies and transmitter powers compared for penetration depth, resolution and reflection continuity. Geophys. Prospect. 1995, 43, 693–709. [Google Scholar] [CrossRef]
- Anchuela, O.; Casas-Sainz, A.; Pocoví, A.; Gil-Garbi, H.; Calvín, P. Characterization of the Karstic Process in an Urban Environment Using GPR Surveys. J. Mater. Civ. Eng. 2014, 26. [Google Scholar] [CrossRef]
- Foyo, A.; Tomillo, C.; Sánchez, M.A.; Suarez, J.L. Esquema Geológico del Entorno de la Cueva de Altamira; LAS-HERAS, J.A., Ed.; Redescubrir Altamira, Turner: Madrid, Spain, 2002; pp. 273–286. [Google Scholar]
- Hoyos, M.; Bustillo, A.; García, A.; Martin, C.; Ortiz, R.; Suazo, C. Características Geológico-Kársticas de la Cueva de Al-Tamira (Santillana del Mar, Santander); Informe Ministerio de Cultura: Madrid, Spain, 1981; p. 81.
- Pérez-Garcia, V.; García, F.; Rodríguez Abad, I. GPR evaluation of the damage found in the reinforced concrete base of a block of flats: A case study. NDT E Int. 2008, 41, 341–353. [Google Scholar] [CrossRef]
- Estudio integral del estado de conservación de la Cueva de Altamira y sus representaciones artísticas paleolíticas. In Perspectivas Futuras de Conservación Consejo Superior de Investigaciones Científicas; Ministerio de Ciencia e Innovación: Madrid, Spain, 2009; p. 397.
- Benedetto, A.; Tosti, F.; Bianchini Ciampoli, L.; D’Amico, F. An overview of ground-penetrating radar signal processing techniques for road inspections. Signal Process. 2017, 132, 201–209. [Google Scholar] [CrossRef]
- Bayarri-Cayón, V.; Latova, J.; Castillo, E.; Lasheras, J.A.; De Las Heras, C.; Prada, A. Nueva ortoimagen verdadera del Techo de Polícromos de la Cueva de Altamira, in: ARKEOS | perspectivas em diálogo, nº 37. In XIX International Rock Art Conference IFRAO 2015. Symbols in the Landscape: Rock Art and Its Context. Conference Proceedings; Instituto Terra e Memória: Tomar, Portugal, 2015; pp. 2308–2320. ISBN 978-84-9852-463-5. [Google Scholar]
- Elez, J.; Cuezva, S.; Fernandez-Cortes, A.; Garcia-Anton, E.; Benavente, D.; Cañaveras, J.C.; Sanchez-Moral, S. A GIS-based methodology to quantitatively define an Adjacent Protected Area in a shallow karst cavity: The case of Altamira cave. J. Environ. Manag. 2013, 118, 122–134. [Google Scholar] [CrossRef] [PubMed]
- Blender Online Community. Blender—A 3D Modelling and Rendering Package; Blender Foundation, Stichting Blender Foundation: Amsterdam, The Netherlands, 2018. [Google Scholar]
- Cendrero, A. Influencia de la composición de la roca soporte en el deterioro de las pinturas de Altamira. In Volumen Con-memorativo Centenario Altamira; Dirección General del Patrimonio: Madrid, Spain, 1981; pp. 579–580. [Google Scholar]
- Sánchez-Moral, S.; Cañaveras, J.C.; Soler, V.; Saiz, C.; Bedoya, J.; Lario, J. La Conservación del Monumento. In Redescubrir Altamira; Turner Ediciones: Madrid, Spain, 2002; pp. 245–257. [Google Scholar]
- Valle, F.J.; Moya, J.S.; Cendrero, A. Estudio de la roca soporte de las pinturas rupestres de la cueva de Altamira. Zephyrus 1978, 28–29, 5–15. [Google Scholar]





















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bayarri, V.; Prada, A.; García, F.; Díaz-González, L.M.; De Las Heras, C.; Castillo, E.; Fatás, P. Integration of Remote-Sensing Techniques for the Preventive Conservation of Paleolithic Cave Art in the Karst of the Altamira Cave. Remote Sens. 2023, 15, 1087. https://doi.org/10.3390/rs15041087
Bayarri V, Prada A, García F, Díaz-González LM, De Las Heras C, Castillo E, Fatás P. Integration of Remote-Sensing Techniques for the Preventive Conservation of Paleolithic Cave Art in the Karst of the Altamira Cave. Remote Sensing. 2023; 15(4):1087. https://doi.org/10.3390/rs15041087
Chicago/Turabian StyleBayarri, Vicente, Alfredo Prada, Francisco García, Lucía M. Díaz-González, Carmen De Las Heras, Elena Castillo, and Pilar Fatás. 2023. "Integration of Remote-Sensing Techniques for the Preventive Conservation of Paleolithic Cave Art in the Karst of the Altamira Cave" Remote Sensing 15, no. 4: 1087. https://doi.org/10.3390/rs15041087
APA StyleBayarri, V., Prada, A., García, F., Díaz-González, L. M., De Las Heras, C., Castillo, E., & Fatás, P. (2023). Integration of Remote-Sensing Techniques for the Preventive Conservation of Paleolithic Cave Art in the Karst of the Altamira Cave. Remote Sensing, 15(4), 1087. https://doi.org/10.3390/rs15041087