
Improved Analytical Formula for the SAR Doppler Centroid Estimation Standard Deviation for a Dynamic Sea Surface


Abstract
1. Introduction
2. Derivation of an Improved Analytical Formula for the SAR Doppler Centroid Estimation STD for a Dynamic Sea Surface
2.1. Derivation of the Formula for
- Expressing as a function of and , rather than PRF, has the consequence of decoupling the PRF and the Doppler bandwidth because they can each take any value independently.
- How the four parameters of , , and in Equation (7) govern the value is explained as follows:
- Given that the Doppler centroid estimator shown in Equation (1) is equivalent to the Doppler centroid estimator that works by correlating the Doppler power spectrum of the received SAR data with a sine function, the total amount of noise incorporated into the correlation results reduces with a decrease in the Doppler bandwidth; thus, the smaller the value of (or what is equivalent, the narrower the radar beam in the azimuth direction), the lower the value of .
- An increase in the amount of the scene observation time, increases the accuracy of the Doppler centroid measurement; hence, the larger the value of , the smaller the value of .
- An increase in the sharpness of the shape that the Doppler power spectrum exhibits facilitates the determination of the Doppler centroid in the presence of speckle and thermal noises. Therefore, the larger the spectrum sharpness factor , the smaller the value of .
- It is a straightforward fact that the larger the number of range samples, , the smaller the value of .
2.2. Derivation of the Formula for
3. Method of Monte Carlo Simulations
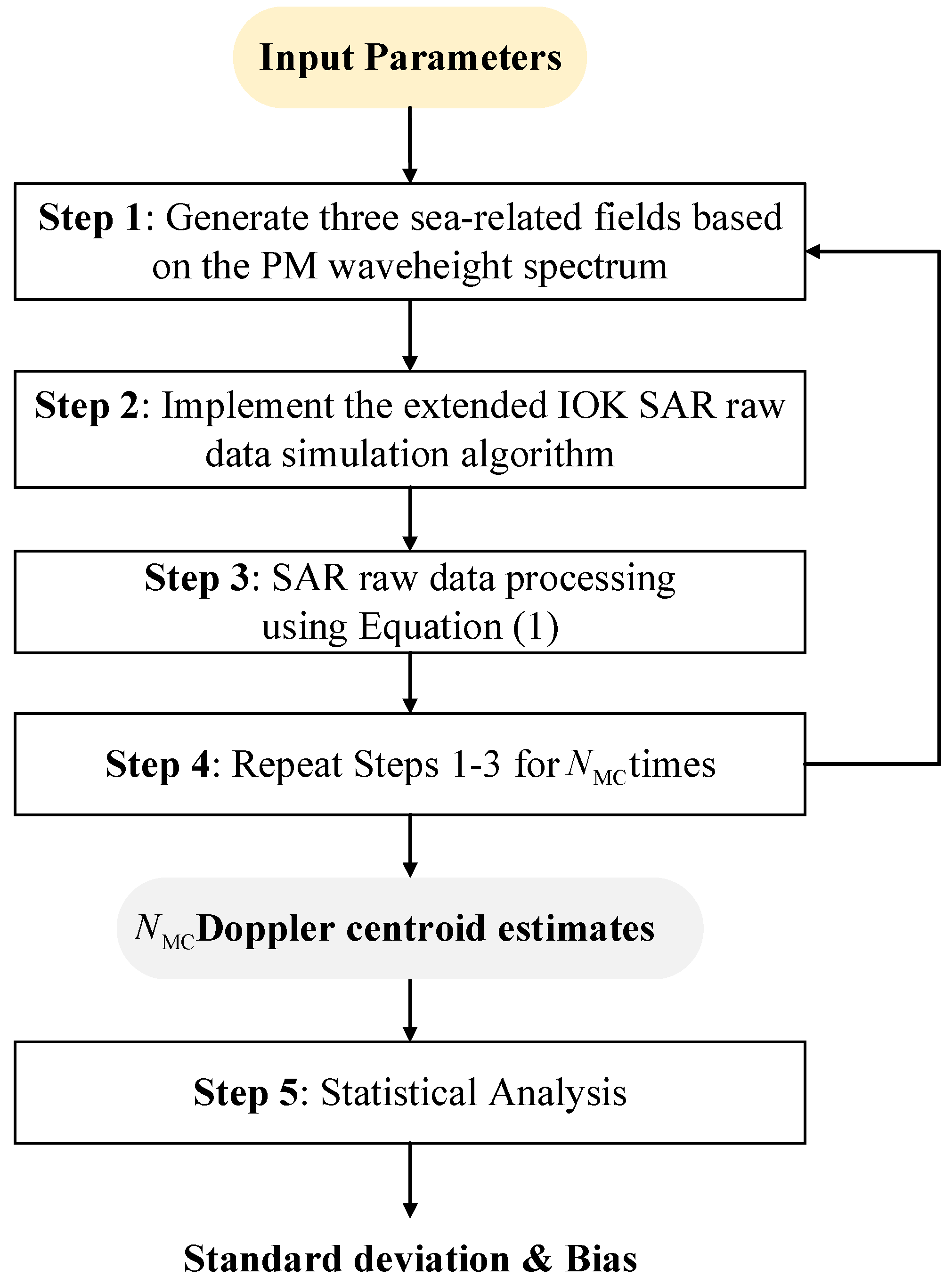
3.1. Procedures of Monte Carlo Simulations
- A 2D random discrete wave height field with a given grid cell spacing is generated as a superimposition of a series of 2D sine harmonic waves (As discussed in [31], at wavelengths more than 10 m in our simulation, the interactions between small- and large-scale waves can be considered negligible. Consequently, the sea surface can be defined by a Gaussian probability density function where the phases of each component are independent and equally distributed between 0 and 2π.), with each harmonic wave component characterized by its amplitude, phase, and propagation direction [31]. The amplitude of each harmonic wave component is generated by a Rayleigh distribution random number generator with a variance set to the energy contained in each spectral bin of the resulting PM wave height spectrum. The phase of each harmonic wave component is generated by a random number generator equally distributed between 0 and . The phases of the individual harmonic wave components are made to be statistically uncorrelated to obtain a Gaussian-distributed sea surface.
- Once a 2D wave height field is realized, we can compute the local incidence angle at each grid cell on the generated discrete 2D sea surface. Subsequently, these local incidence angles are used as input parameters in a theoretical formula for the NRCS in the Bragg regime [33] such that a 2D discrete NRCS field can be realized. Hydrodynamic modulation is also considered in generating the NRCS field. Afterward, the 2D random discrete complex reflectivity field can be generated using a Gaussian random number generator, with the variance of the generated Gaussian-distributed number at each grid cell equal to the NRCS value at the same grid cell. In this way, the speckle noise is incorporated into the 2D complex reflectivity field.
- Given the generated 2D wave height field, we can also calculate a 2D radial velocity field corresponding to large-scale sea waves with sizes greater than a grid cell using the transfer function relating the radial orbital velocities of large-scale sea waves to the wave heights [32,34]. Moreover, the spread of small-scale velocities within one single-grid cell is modeled as a random perturbation of the local long-wave orbital velocity [35]. In this way, the 2D random discrete radial sea wave velocity field can be realized.
- The 2D radial sea wave velocity field generated in Step 1 enters both the envelope and the phase of the 2D frequency (range and Doppler frequencies) complex spectrum of the SAR signal, from which the extended IOK algorithm developed in [35] can be implemented to simulate the SAR raw data for the moving sea surface. To account for the spatial variation of the ocean motion parameters, this simulator adopts the batch-processing operation, where a single implementation of the IOK algorithm will simultaneously simulate a collection of ocean surface backscattering elements with the same radial velocity, significantly raising the computational simulation efficiency. Further details about this simulator can be found in [35].
- A sinc-squared function is assumed for the Doppler envelope of the 2D frequency complex spectrum of the SAR signal.
- SAR raw data are first simulated with a relatively large PRF (e.g., twice the originally prescribed PRF). The simulated SAR raw data are then subsampled in the azimuth time domain by a factor of two to obtain the Doppler-aliased SAR raw data.
- A discrete grid of white thermal noise is added to the simulated SAR raw data such that a certain prescribed SNR is achieved. The prescribed SNR is determined as the ratio of the mean NRCS of the sea to the NESZ using Equation (14). The mean NRCS is computed according to a geophysical model function (GMF) (e.g., the CMOD5 GMF [36], the XMOD2 GMF [37], etc.), which directly relates the wind speed to the NRCS.
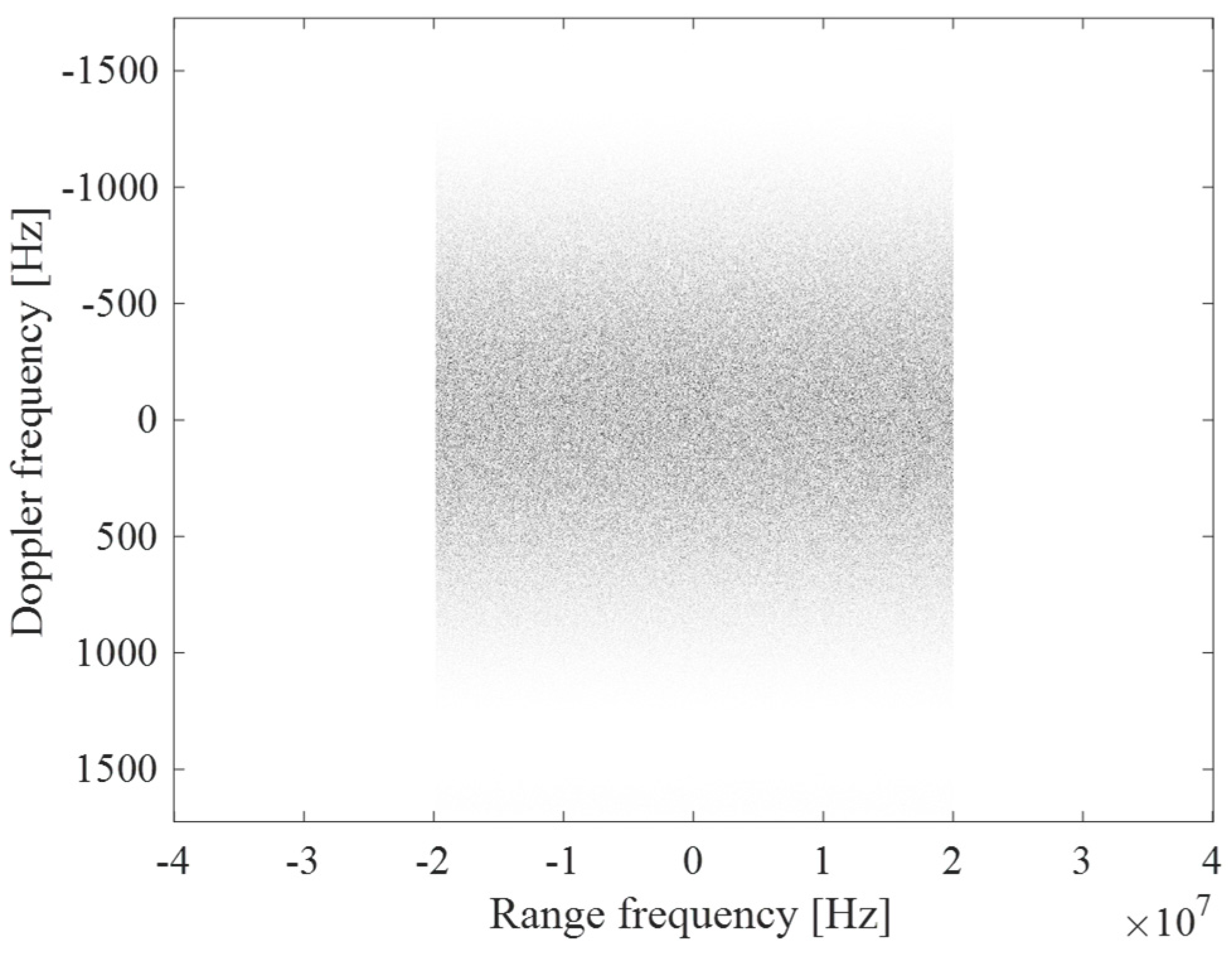
3.2. Example of Monte Carlo Simulations
4. Comparison of the New Formula with Other Existing Formulas
4.1. Doppler Centroid Estimation STD versus Wind Speed
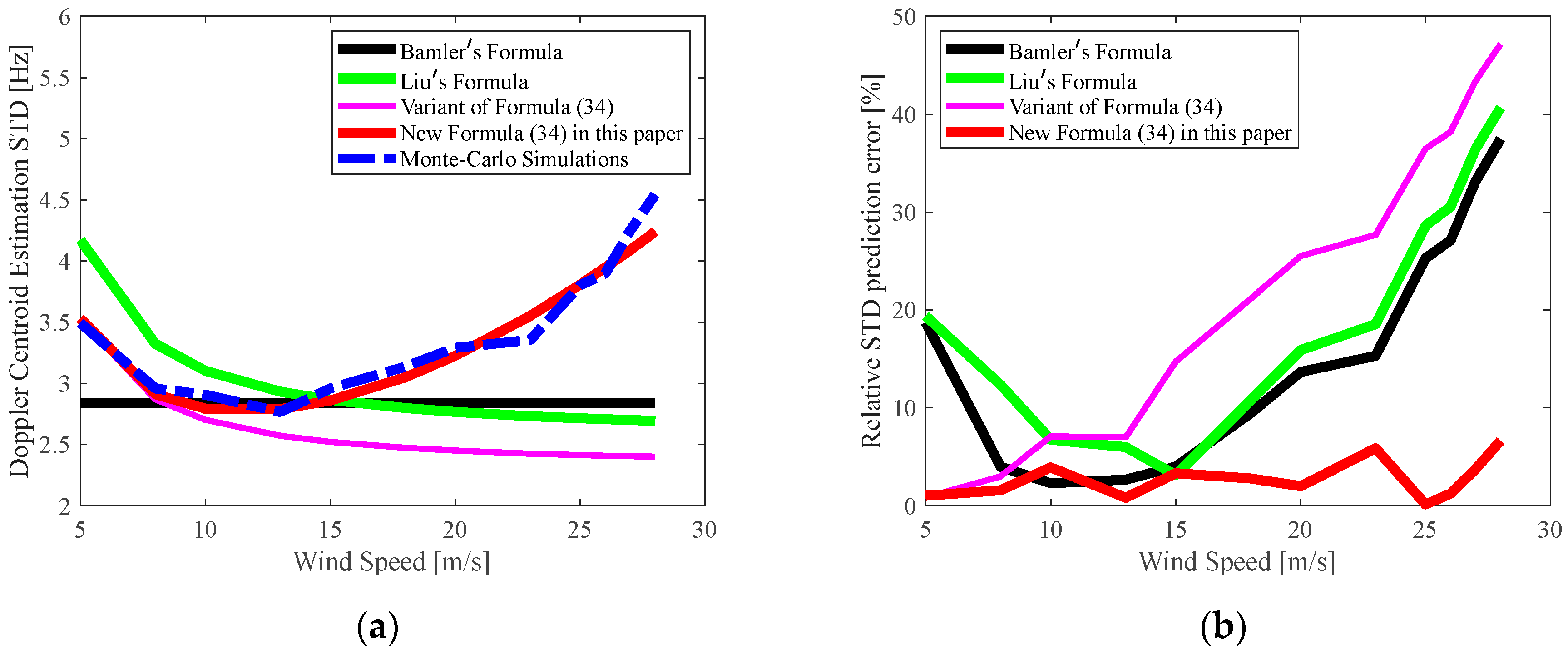
- Bamler’s formula (Equation (36), [23]) fails to characterize the changes in the Doppler centroid estimation STD with the wind speed because it does not consider the SNR variation with the wind speed or the sea wave motions.
- Liu’s formula (Equation (18), [24]) evidently underappreciates the effect of the sea wave motions on the Doppler centroid estimation STD when the wind speed exceeds 13 m/s because it fails to consider the correlation in the sea wave motion between two adjacent SAR range resolution cells. Instead, it takes the number of range resolution cells as the number of independent range samples of the sea wave velocity field, making the number of independent range samples of the sea wave velocity field used in this formula (Equation (18), [24]) larger than it is in practical situations.
- In contrast, the newly derived formula in this paper [Equation (34)] does not suffer from any of the aforementioned limitations. In Figure 15a, the curve of the Doppler centroid estimation STD predicted by the newly derived formula [Equation (34)] is more consistent with that obtained from the Monte Carlo simulations than the curves predicted by Bamler’s (Equation (36), [23]) and Liu’s (Equation (18), [24]) formulas. The improvements in predicting the Doppler centroid estimation STD provided by the newly derived formula [Equation (34)] result from the consideration of both the SNR variation with the wind speed [see Equations (12) and (14)] and the variation of the correlation length of the sea wave velocity field with the wind speed [Equation (30)] derived in this work. These improvements can also be observed in Figure 14b. The relative prediction error, defined as the absolute value of the difference between the predicted and measured values of the Doppler centroid estimation STD divided by the latter, for the newly derived formula [Equation (34)] is smaller than that for Bamler’s (Equation (36), [23]) and Liu’s (Equation (18), [24]) formulas over most of the wind speed region.
- The significance of including the correlation length of the sea wave velocity field is further justified by observing the curve of the Doppler centroid estimation STD predicted by the variant of Equation (34), in which [Equation (17)] is replaced by the number of geometric range resolution cells. In Figure 15, this curve exhibits poor agreement with that measured from the Monte Carlo simulations, especially for wind speeds above 10 m/s.
4.2. Doppler Centroid Estimation STD Versus SNR
- Within the SNR range of −4 to 8 dB, the curve predicted by Liu’s formula (Equation (18), [24]) is inconsistent with the curve obtained from the Monte Carlo simulations. This is because Liu’s formula (Equation (18), [24]) heuristically quantifies the overall effect of the thermal noise and the Doppler aliasing on the Doppler centroid estimation STD as the product of their individual effects (Equation (A5), [24]). Consequently, this limits the ability of their formula to reflect the real situation.
- In Figure 16a, the curve of the Doppler centroid estimation STD predicted by the newly derived formula [Equation (34)] is more consistent with that obtained from the Monte Carlo simulations than those predicted by Bamler’s (Equation (36), [23]) and Liu’s (Equation (18), [24]) formulas. The improvement provided by the newly derived formula [Equation (34)] in predicting the Doppler centroid estimation STD is attributed to the inclusion of the SNR variation in Equation (34) and the effects of Doppler aliasing and thermal noise on the Doppler sharpness factor variations being jointly quantified in a mathematically exact, rather than heuristic, manner, as in Liu’s formula (Equation (18), [24]). The improvements can also be observed from the relative prediction error versus the SNR, as shown in Figure 15b, for the newly derived formula [Equation (34)], which is more stable as a whole than those errors related to Bamler’s (Equation (36), [23]) and Liu’s (Equation (18), [24]) formulas.
4.3. Doppler Centroid Estimation STD Versus Azimuth Oversampling Ratio
- Bamler’s formula (Equation (36), [23]) visibly again fails to characterize the changes in the Doppler centroid estimation STD with the azimuth oversampling ratio because it uses a fixed azimuth oversampling ratio without considering the decoupling of the PRF and the Doppler bandwidth.
- Liu’s formula (Equation (18), [24]) fails to accurately predict the variation of the Doppler centroid estimation STD with the azimuth oversampling ratio, though a mild change in the STD is found. This behavior can be explained as follows: Liu’s formula (Equation (18), [24]) considers the effect of the Doppler bandwidth variation on the overall speckle noise level but does not account for its effect on the Doppler spectrum sharpness factor (this formula sets the Doppler aliasing-related spectrum sharpness factor to a fixed value of 0.7 regardless of its actual variation with the azimuth oversampling ratio).
- From Figure 17, the newly derived formula [Equation (34)] performs better than the other formulas in predicting the Doppler centroid estimation STD. These improvements are obtained because the newly derived formula fully decouples the PRF and Doppler bandwidth by considering the effect of the Doppler bandwidth variation on the overall speckle noise level [see Equation (7)] and expressing the spectrum sharpness factor as a function of the azimuth oversampling ratio [see Equation (12)]. This means that the PRF and Doppler bandwidth can independently take any value, as discussed in Section 2.1.
4.4. Overall Assessment of the Performance of the Newly Derived Formula
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Marra, J.; Martin, S. An Introduction to Ocean Remote Sensing, 2nd ed.; Cambridge University Press: Cambridge, UK, 2014. [Google Scholar]
- Klemas, V. Remote Sensing of Coastal and Ocean Currents: An Overview. J. Coast. Res. 2012, 28, 576–586. [Google Scholar]
- Goldstein, R.M.; Zebker, H.A. Interferometric Radar Measurement of Ocean Surface Currents. Nature 1987, 328, 707–709. [Google Scholar]
- Graber, H.C.; Thompson, D.R.; Carande, R.E. Ocean Surface Features and Currents Measured with Synthetic Aperture Radar Interferometry and HF Radar. J. Geophys. Res. Ocean. 1996, 101, 25813–25832. [Google Scholar] [CrossRef]
- Romeiser, R. Current Measurements by Airborne Along-Track InSAR: Measuring Technique and Experimental Results. IEEE J. Ocean. Eng. 2005, 30, 552–569. [Google Scholar]
- Romeiser, R.; Breit, H.; Eineder, M.; Runge, H.; Flament, P.; Jong, K.D.; Vogelzang, J. Current Measurements by SAR Along-Track Interferometry from a Space Shuttle. IEEE Trans. Geosci. Remote Sens. 2005, 43, 2315–2324. [Google Scholar]
- Romeiser, R.; Runge, H. Theoretical Evaluation of Several Possible Along-Track InSAR Modes of TerraSAR-X for Ocean Current Measurements. IEEE Trans. Geosci. Remote Sens. 2007, 45, 21–35. [Google Scholar]
- Romeiser, R.; Suchandt, S.; Runge, H.; Steinbrecher, U.; Grünler, S. First Analysis of TerraSAR-X Along-Track InSAR-Derived Current Fields. IEEE Trans. Geosci. Remote Sens. 2010, 48, 820–829. [Google Scholar]
- Romeiser, R.; Runge, H.; Suchandt, S.; Kahle, R.; Rossi, C.; Bell, P.S. Quality Assessment of Surface Current Fields from TerraSAR-X and TanDEM-X Along-Track Interferometry and Doppler Centroid Analysis. IEEE Trans. Geosci. Remote Sens. 2014, 52, 2759–2772. [Google Scholar] [CrossRef]
- Martin, A.C.H.; Gommenginger, C. Towards Wide-Swath High-Resolution Mapping of Total Ocean Surface Current Vectors from Space: Airborne Proof-of-Concept and Validation. Remote Sens. Environ. 2017, 197, 58–71. [Google Scholar] [CrossRef]
- Shuchman, R.; Rufenach, C.L.; González, F.; Klooster. The feasibility of measurement of ocean current detection using SAR data. Remote Sens. Environ. 1979, 1, 93–102. [Google Scholar]
- Kooij, M.; Hughes, W.; Sato, S. Doppler Current Velocity Measurements: A New Dimension to Spaceborne SAR Data; Report Published Online; Atlantis Scientific: Nepean, ON, Canada, 2001. [Google Scholar]
- Chapron, B.; Collard, F.; Ardhuin, F. Direct Measurements of Ocean Surface Velocity from Space: Interpretation and Validation. J. Geophys. Res. 2005, 110, C07008-1–C07008-17. [Google Scholar]
- Krug, M.; Mouche, A.; Collard, F.; Johannessen, J.A.; Chapron, B. Mapping the Agulhas Current from Space: An Assessment of ASAR Surface Current Velocities. J. Geophys. Res. 2010, 115, C10026-1–C10026-14. [Google Scholar] [CrossRef]
- Hansen, M.W.; Johannessen, J.A.; Dagestad, K.F.; Collard, F.; Chapron, B. Monitoring the Surface Inflow of Atlantic Water to the Norwegian Sea Using Envisat ASAR. J. Geophys. Res. 2011, 116, C12008-1–C12008-13. [Google Scholar]
- Hansen, M.W.; Collard, F.; Dagestad, K.-F.; Johannessen, J.A.; Fabry, P.; Chapron, B. Retrieval of Sea Surface Range Velocities from Envisat ASAR Doppler Centroid Measurements. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3582–3592. [Google Scholar]
- Romeiser, R.; Thompson, D.R. Numerical Study on the Along-Track Interferometric Radar Imaging Mechanism of Oceanic Surface Currents. IEEE Trans. Geosci. Remote Sens. 2000, 38, 446–458. [Google Scholar] [CrossRef]
- Johannessen, J.A.; Chapron, B.; Collard, F.; Kudryavtsev, V.; Mouche, A.; Akimov, D.; Dagestad, K.-F. Direct Ocean Surface Velocity Measurements from Space: Improved Quantitative Interpretation of Envisat ASAR Observations. Geophys. Res. Lett. 2008, 35, L22608-1–L22608-6. [Google Scholar] [CrossRef]
- Hansen, M.W.; Kudryavtsev, V.; Chapron, B.; Johannessen, J.A.; Collard, F.; Dagestad, K.-F.; Mouche, A.A. Simulation of Radar Backscatter and Doppler Shifts of Wave–Current Interaction in the Presence of Strong Tidal Current. Remote Sens. Environ. 2012, 120, 113–122. [Google Scholar]
- Martin, A.C.H.; Gommenginger, C.; Marquez, J.; Doody, S.; Navarro, V.; Buck, C. Wind-wave-induced Velocity in ATI SAR Ocean Surface Currents: First Experimental Evidence from an Airborne Campaign. J. Geophys. Res. Ocean. 2016, 121, 1640–1653. [Google Scholar]
- Yurovsky, Y.; Kudryavtsev, V.; Grodsky, S.; Chapron, B. Sea Surface Ka-Band Doppler Measurements: Analysis and Model Development. Remote Sens. 2019, 11, 839. [Google Scholar] [CrossRef]
- Mouche, A.A.; Collard, F.; Chapron, B.; Dagestad, K.-F.; Guitton, G.; Johannessen, J.A.; Kerbaol, V.; Hansen, M.W. On the Use of Doppler Shift for Sea Surface Wind Retrieval From SAR. IEEE Trans. Geosci. Remote Sens. 2012, 50, 2901–2909. [Google Scholar]
- Bamler, R. Doppler Frequency Estimation and the Cramer-Rao Bound. IEEE Trans. Geosci. Remote Sens. 1991, 29, 385–390. [Google Scholar]
- Liu, B.; He, Y.; Li, X. A New Concept of Full Ocean Current Vector Retrieval with Spaceborne SAR Based on Intrapulse Beam-Switching Technique. IEEE Trans. Geosci. Remote Sens. 2020, 58, 7682–7704. [Google Scholar]
- Madsen, S.N. Estimating the Doppler Centroid of SAR Data. IEEE Trans. Aerosp. Electron. Syst. 1989, 25, 134–140. [Google Scholar]
- Cumming, I.G.; Wong, F.H. Digital Processing of Synthetic Aperture Radar Data: Algorithms and Implementation; Artech House: Norwood, MA, USA, 2005. [Google Scholar]
- Jackson, F.C.; Lyzenga, D.R. Microwave techniques for measuring directional wave spectra. In Surface Waves and Fluxes; Geernhaert, G.L., Plant, W.J., Eds.; Kluwer: Amsterdam, The Netherlands, 1990; Volume 2, pp. 221–264. [Google Scholar]
- Frasier, S.J.; Camps, A.J. Dual-Beam Interferometry for Ocean Surface Current Vector Mapping. IEEE Trans. Geosci. Remote Sens. 2001, 39, 401–414. [Google Scholar]
- Pierson, W.J.; Moskowitz, L. A Proposed Spectral Form for Fully Developed Wind Seas Based on the Similarity Theory of S. A. Kitaigorodskii. J. Geophys. Res. 1964, 69, 5181–5203. [Google Scholar] [CrossRef]
- Jackson, F.C. The Radar Ocean–Wave Spectrometer. Johns Hopkins APL Tech. Dig. 1987, 8, 116–127. [Google Scholar]
- Havuser, D.; Soussi, E.; Thouvenot, E. SWIMSAT: A Real-Aperture Radar to Measure Directional Spectra of Ocean Waves from Space-Main Characteristics and Performance Simulation. J. Atmos. Ocean. Technol. 2001, 18, 421–437. [Google Scholar] [CrossRef]
- Alpers, W.R.; Rufenach, C.L. The Effect of Orbital Motion on Synthetic Aperture Radar Imaging of Ocean Waves. IEEE Trans. Antennas Propag. 1979, 27, 685–690. [Google Scholar] [CrossRef]
- Alpers, W.R.; Ross, D.B.; Rufenach, C.L. On the Detectability of Ocean Surface Waves by Real and Synthetic Aperture Radar. J. Geophys. Res. 1981, 86, 6481–6498. [Google Scholar] [CrossRef]
- Lyzenga, D.R. Numerical Simulation of Synthetic Aperture Radar Image Spectra for Ocean Waves. IEEE Trans. Geosci. Remote Sens. 1986, 24, 863–872. [Google Scholar]
- Liu, B.; He, Y. SAR Raw Data Simulation for Ocean Scenes Using Inverse Omega-K Algorithm. IEEE Trans. Geosci. Remote Sens. 2016, 54, 6151–6169. [Google Scholar]
- Hersbach, H.; Stoffelen, A.S.; Haan, S.D. An Improved C-Band Scatterometer Ocean Geophysical Model Function: CMOD5. J. Geophys. Res. 2007, 112, C03006. [Google Scholar] [CrossRef]
- Li, X.; Lehner, S. Algorithm for sea surface wind retrieval from Terrasar-X and Tandem-X data. IEEE Trans. Geosci. Remote Sens. 2014, 52, 2928–2939. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Radar platform velocity | 7600 m/s |
| NESZ | −20 dB |
| Antenna length in azimuth | 9.6 m |
| Chirp bandwidth | 40 MHz |
| Pulse repetition frequency | 1725 Hz |
| Doppler centroid estimation resolution | 1.0 × 1.0 km |
| Doppler bandwidth | 1403 Hz |
| Signal bandwidth | 40 MHz |
| Significant wave height | 2.8 m |
| Wind speed at a height of 10 m | 13 m/s |
| Incidence angle | 45° |
| Squint angle | 0° |
| Relative wind direction | 45° |
| Dominant wavelength | 155 m |
| Radar platform altitude | 700 km |
| Radar carrier frequency | 9.6 GHz |
| Range sampling rate | 80 MHz |
| Polarization | VV |
| Relative dielectric constant of ocean water | 48–35 J |
| Mean NRCS | −12 dB |
| Velocity component of current in azimuth | −0.0 m/s |
| Velocity component of current in ground range | +0.65 m/s |
| True Doppler centroid | −29.3674 Hz |
| Number of averaged pulses | 227 |
| Azimuth observation time | 0.1316 s |
| Number of averaged range samples | 380 |
| Number of independent Monte Carlo runs | 390 |
| STD vs. Wind Speed | Average Relative Prediction Error (%) | Correlation Coefficient |
| Bamler’s formula (Equation (36), [23]) | 16.10 | ≈0 |
| Liu’s formula (Equation (18), [24]) | 19.10 | 0.2741 |
| Variant of Equation (34) | 22.69 | 0.2629 |
| Newly derived formula [Equation (34)] | 2.76 | 0.9764 |
| STD vs. SNR | Average Relative Prediction Error (%) | Correlation Coefficient |
| Bamler’s formula (Equation (36), [23]) | 15.99 | ≈0 |
| Liu’s formula (Equation (18), [24]) | 7.92 | 0.9987 |
| Variant of Equation (34) | 8.26 | 0.9988 |
| Newly derived formula [Equation (34)] | 2.61 | 0.9991 |
| STD vs. Azimuth Oversampling Ratio | Average Relative Prediction Error (%) | Correlation Coefficient |
| Bamler’s formula (Equation (36), [23]) | 34.14 | ≈0 |
| Liu’s formula (Equation (18), [24]) | 24.33 | 0.8653 |
| Variant of Equation (34) | 8.65 | 0.9993 |
| Newly derived formula [Equation (34)] | 4.69 | 0.9987 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qiao, S.; Liu, B.; He, Y. Improved Analytical Formula for the SAR Doppler Centroid Estimation Standard Deviation for a Dynamic Sea Surface. Remote Sens. 2023, 15, 867. https://doi.org/10.3390/rs15030867
Qiao S, Liu B, He Y. Improved Analytical Formula for the SAR Doppler Centroid Estimation Standard Deviation for a Dynamic Sea Surface. Remote Sensing. 2023; 15(3):867. https://doi.org/10.3390/rs15030867
Chicago/Turabian StyleQiao, Siqi, Baochang Liu, and Yijun He. 2023. "Improved Analytical Formula for the SAR Doppler Centroid Estimation Standard Deviation for a Dynamic Sea Surface" Remote Sensing 15, no. 3: 867. https://doi.org/10.3390/rs15030867
APA StyleQiao, S., Liu, B., & He, Y. (2023). Improved Analytical Formula for the SAR Doppler Centroid Estimation Standard Deviation for a Dynamic Sea Surface. Remote Sensing, 15(3), 867. https://doi.org/10.3390/rs15030867