
A GNSS/LiDAR/IMU Pose Estimation System Based on Collaborative Fusion of Factor Map and Filtering

Abstract
1. Introduction
2. Materials and Methods
2.1. Factor Graph Optimization
2.2. EKF Filter
3. Methodology
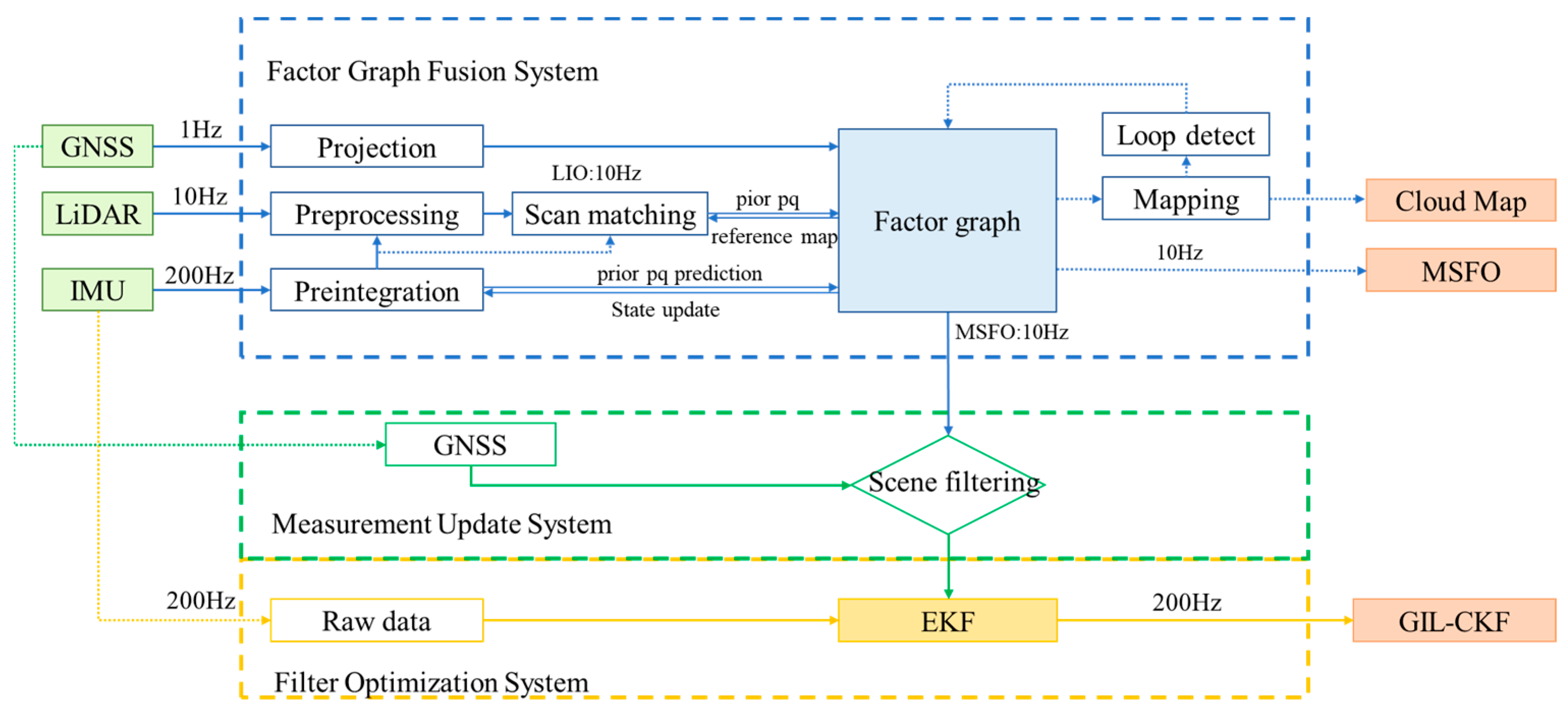
3.1. Technical Framework
3.2. Key Technology
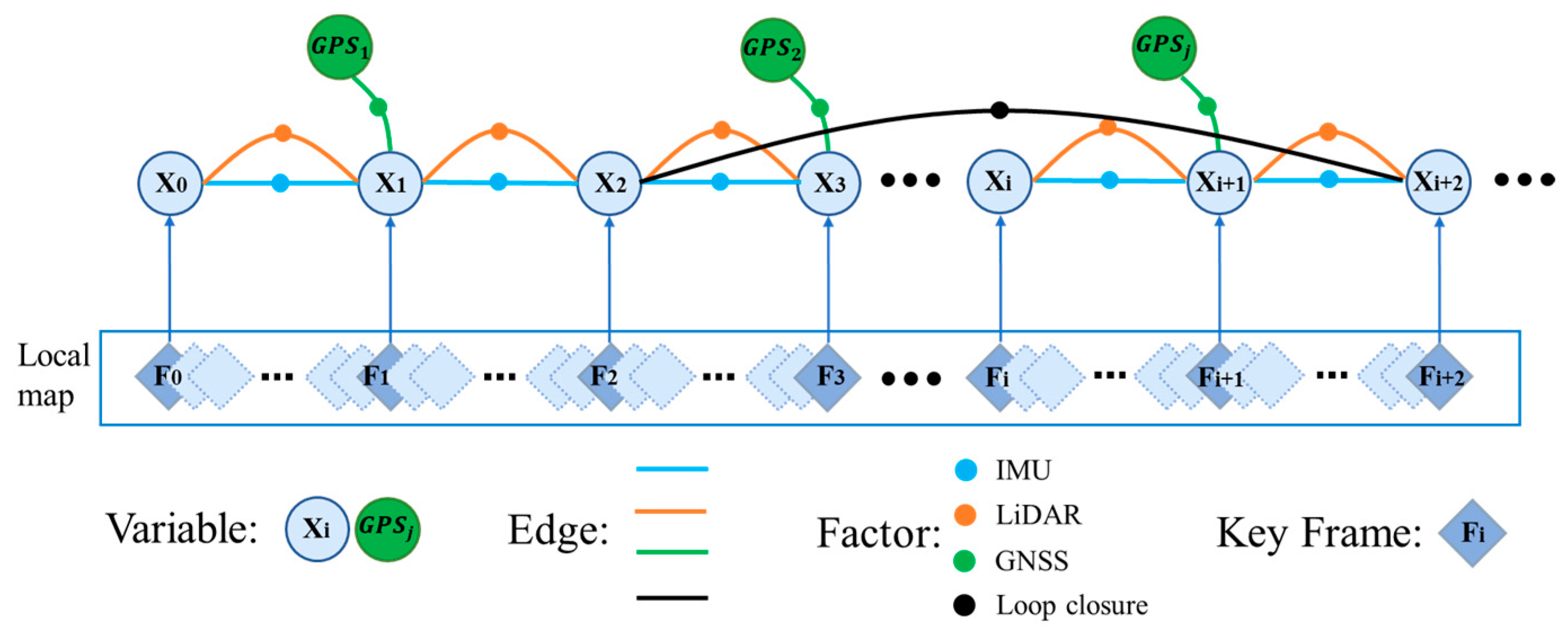
3.2.1. Multi-Sensor Fusion Odometer (MSFO)
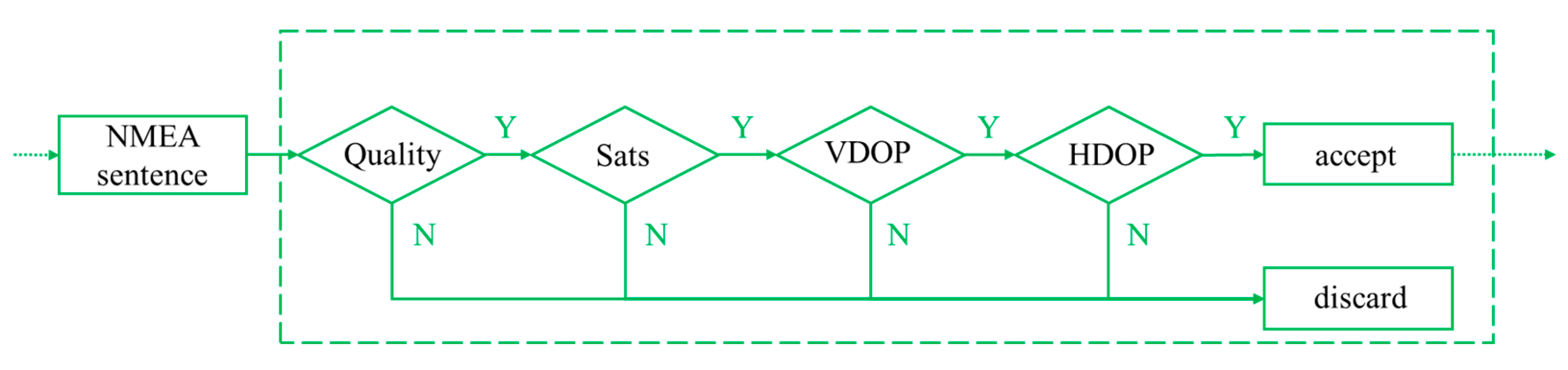
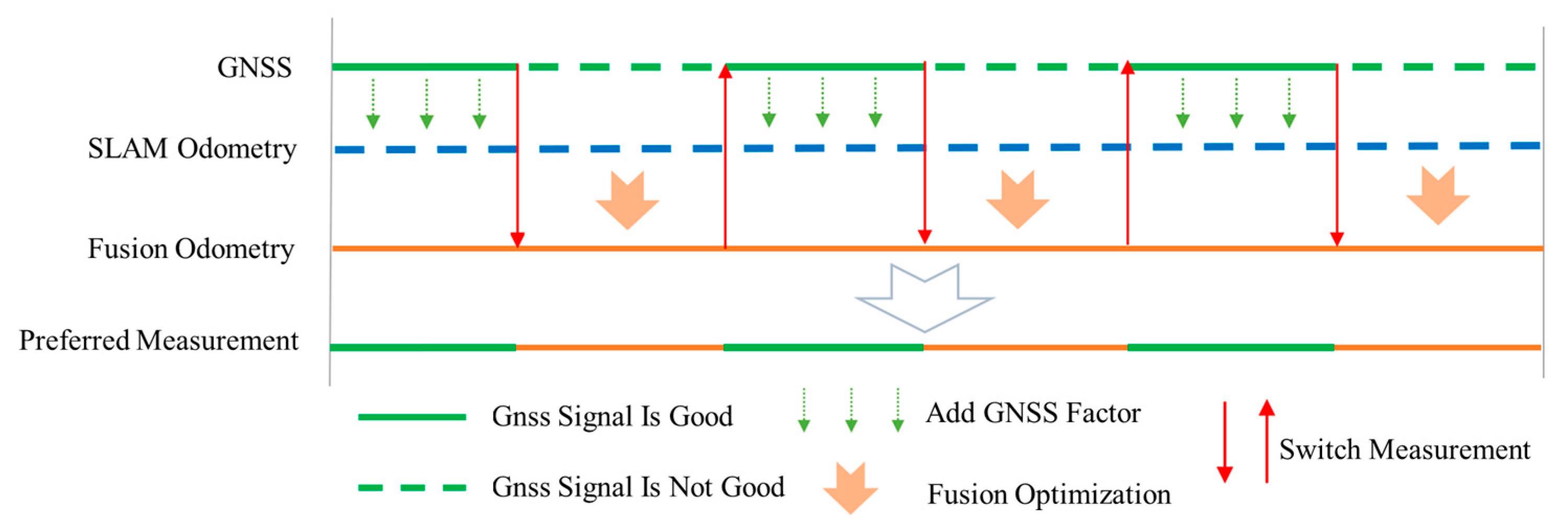
3.2.2. Scene Optimizer (SO)
3.2.3. EKF Optimization Smoothing
4. Experiment and Analysis
4.1. Self-Collection Dataset Experiments
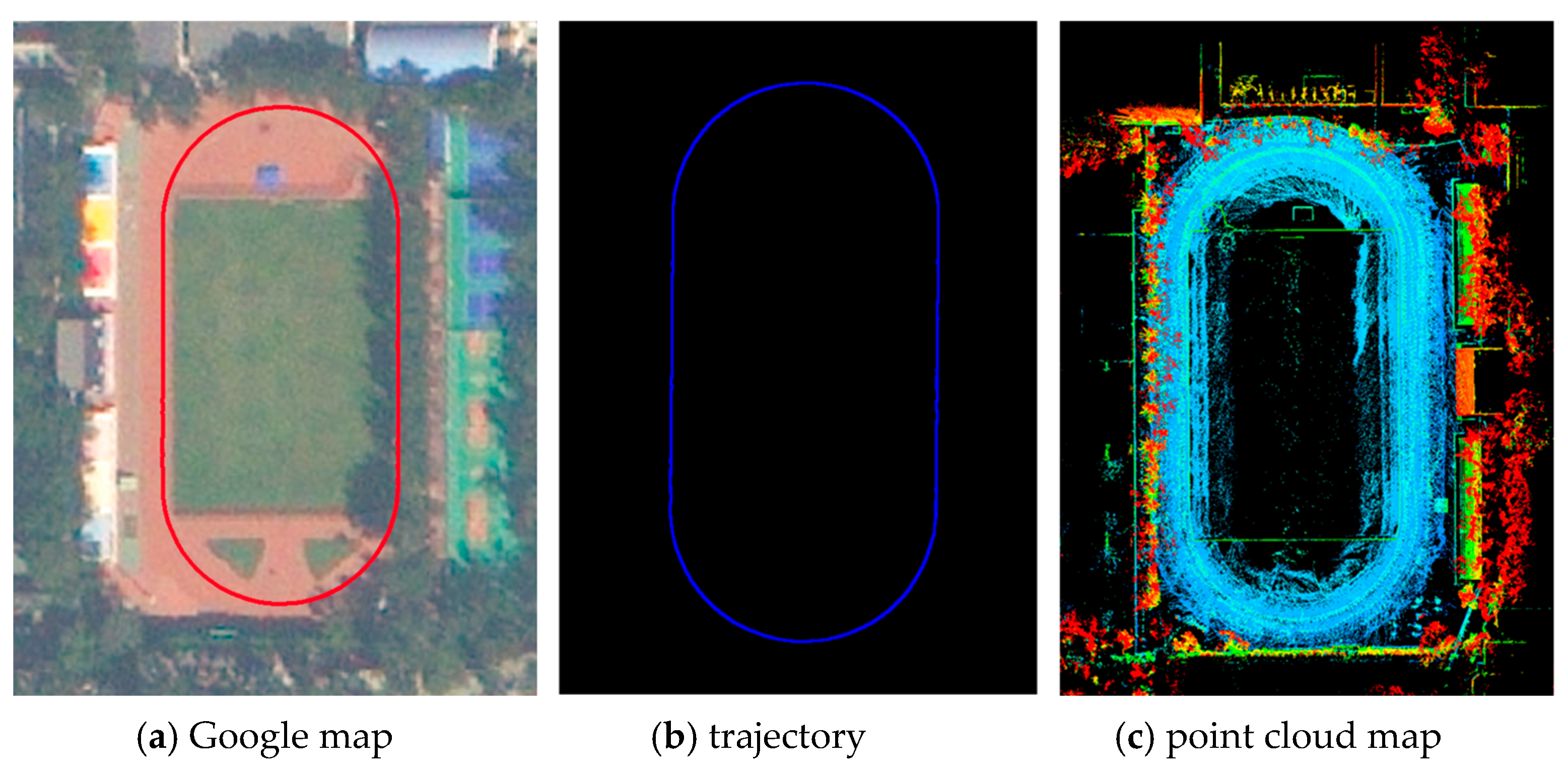
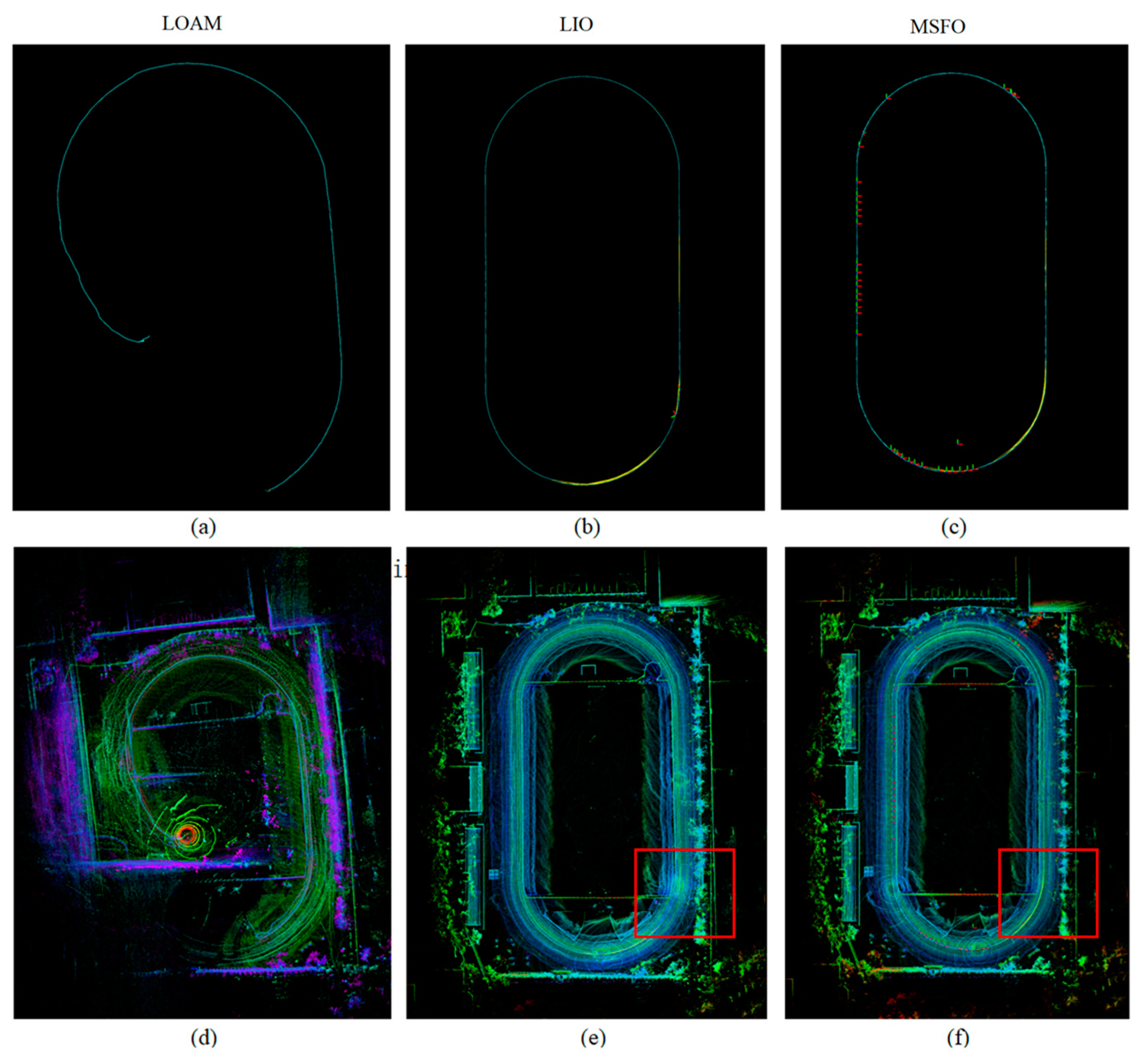
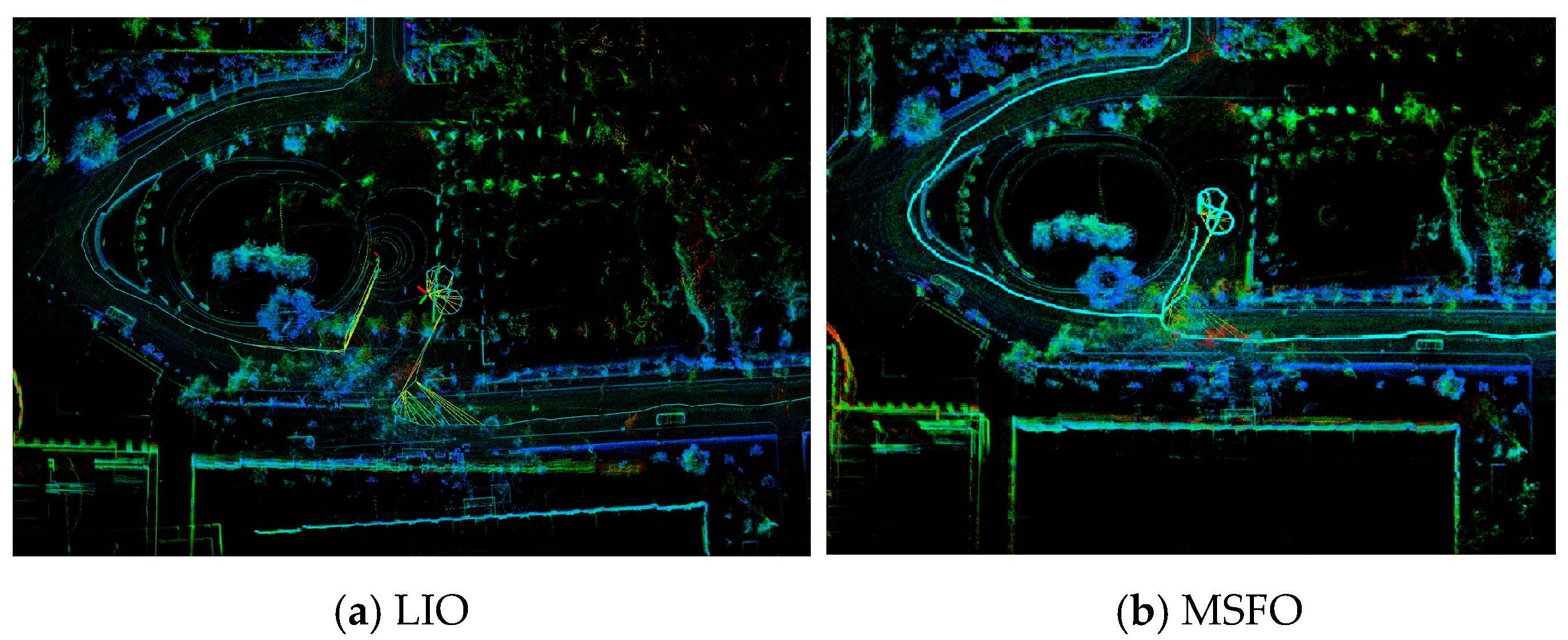
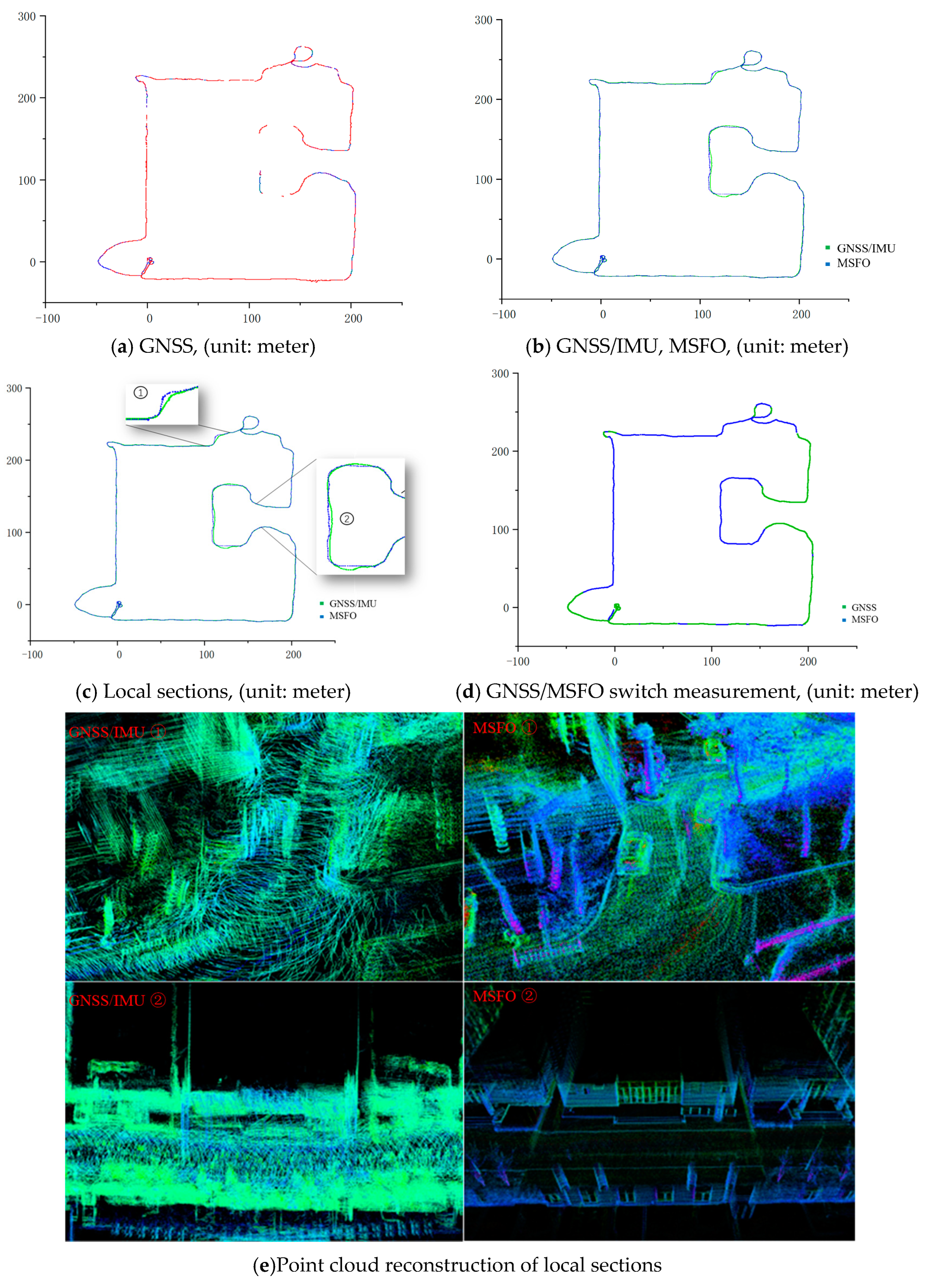
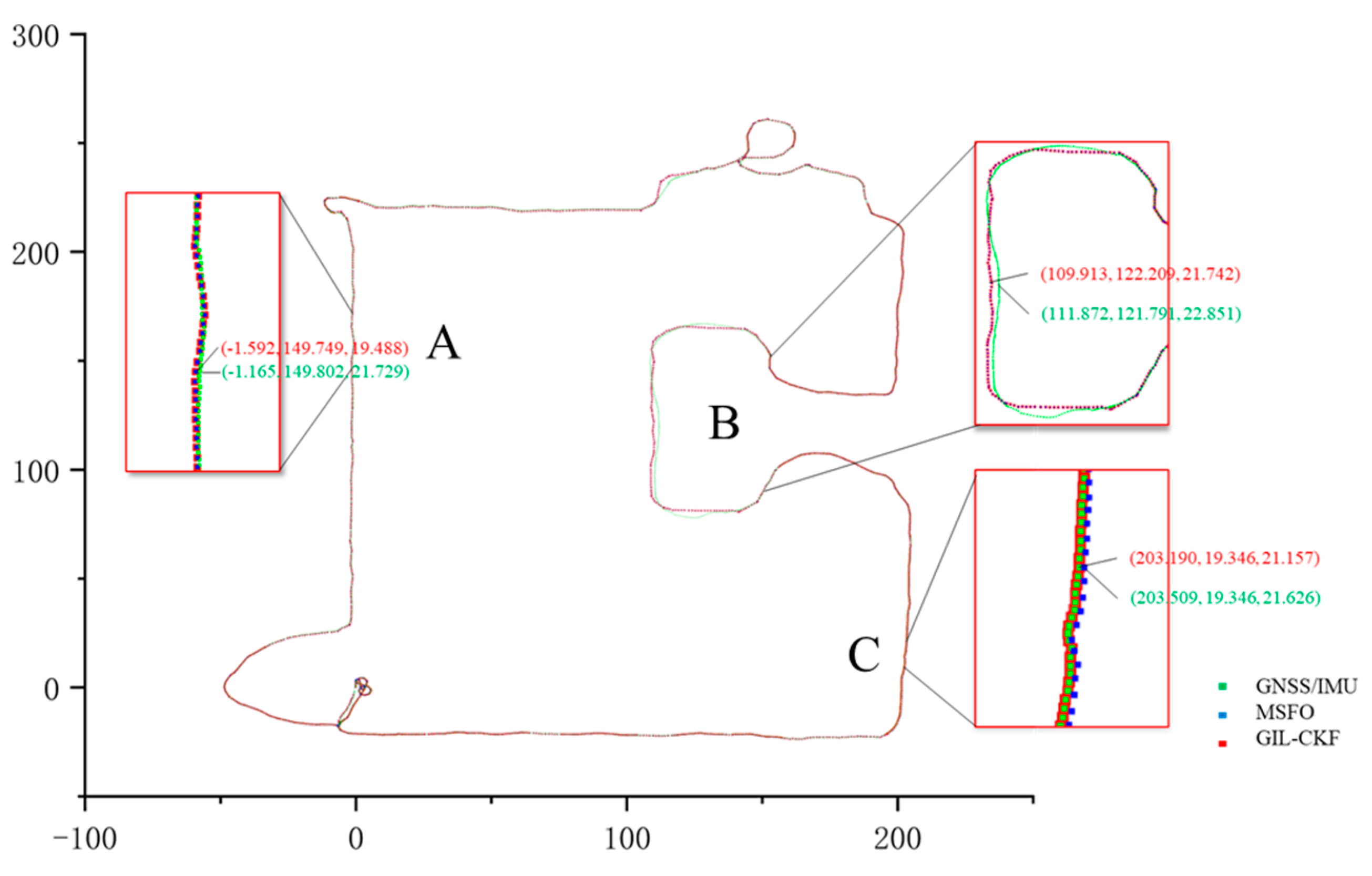
4.1.1. Playground Data
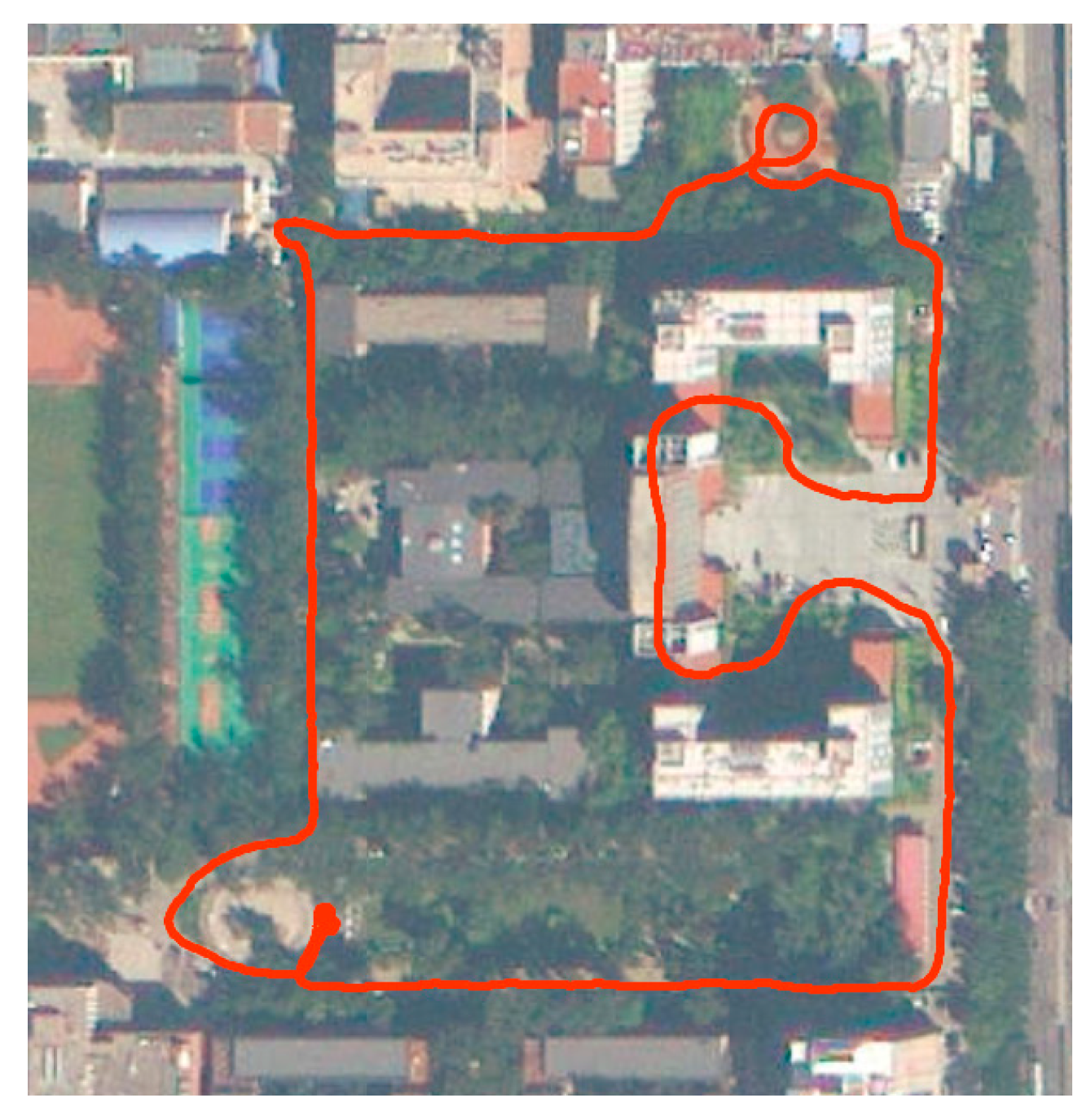
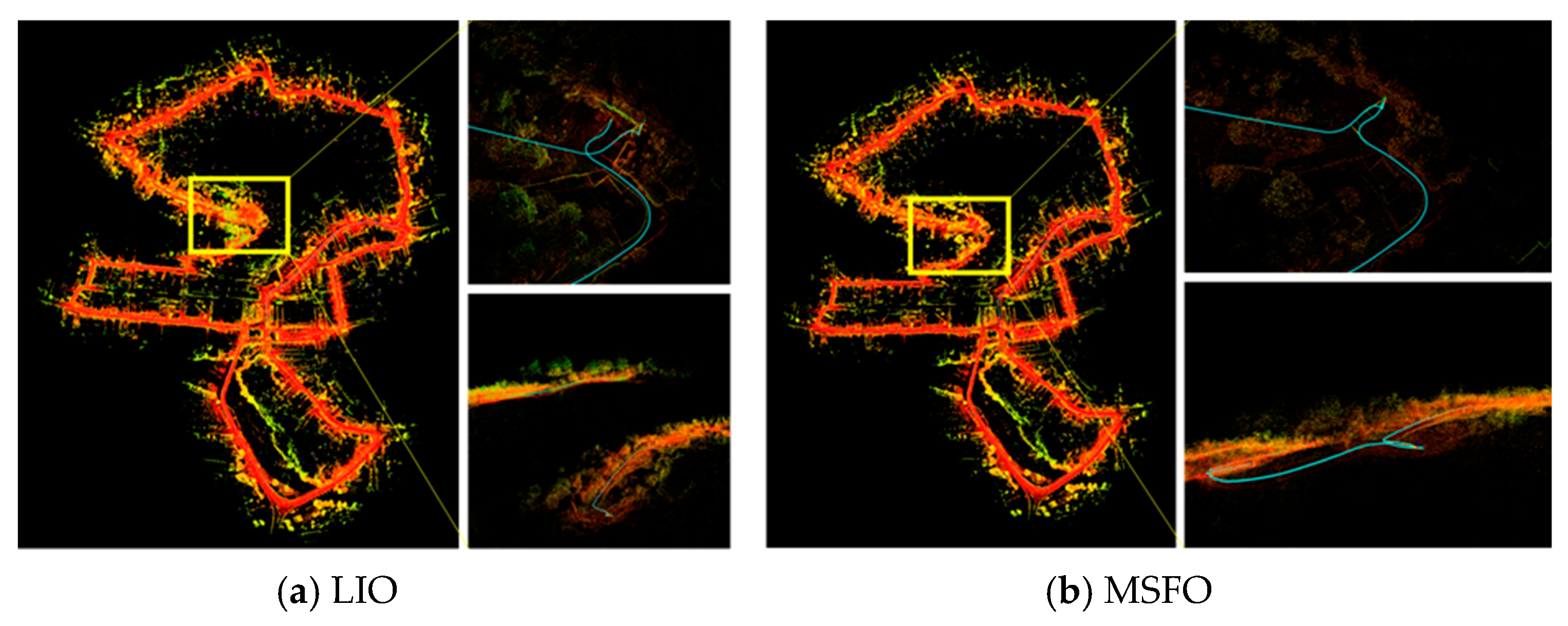
4.1.2. Campus Data
4.2. Utbm Dataset Experiment
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Puente, I.; González-Jorge, H.; Martínez-Sánchez, J.; Arias, P. Review of mobile mapping and surveying technologies. Measurement 2013, 46, 2127–2145. [Google Scholar] [CrossRef]
- Han, S.; Wang, J. Integrated GPS/INS navigation system with dual-rate Kalman Filter. GPS Solut. 2012, 16, 389–404. [Google Scholar] [CrossRef]
- Boime, G.; Sicsik-Pare, E.; Fischer, J. Differential GNSS+INS for Land Vehicle Autonomous Navigation Qualification. Available online: https://www.gpsworld.com/on-the-road-to-driverless/ (accessed on 1 June 2015).
- Han, H.; Wang, J.; Wang, J.; Moraleda, A.H. Reliable Partial Ambiguity Resolution for Single-Frequency GPS/BDS and INS Integration. GPS Solut. 2017, 21, 251–264. [Google Scholar] [CrossRef]
- Qian, C.; Liu, H.; Tang, J.; Chen, Y.; Kaartinen, H.; Kukko, A.; Zhu, L.; Liang, X.; Chen, L.; Hyyppä, J. An integrated GNSS/INS/LiDAR-SLAM positioning method for highly accurate forest stem mapping. Remote Sens. 2017, 9, 3. [Google Scholar] [CrossRef]
- Dissanayake, M.W.M.G.; Newman, P.; Clark, S.; Durrant-Whyte, H.F.; Csorba, M. A solution to the simultaneous localization and map building (SLAM) problem. IEEE Trans. Robot. Autom. 2001, 17, 229–241. [Google Scholar] [CrossRef]
- Bresson, G.; Alsayed, Z.; Yu, L.; Glaser, S. Simultaneous Localization and Mapping: A Survey of Current Trends in Autonomous Driving. IEEE Trans. Intell. Veh. 2017, 2, 194–220. [Google Scholar] [CrossRef]
- Cadena, C.; Carlone, L.; Carrillo, H.; Latif, Y.; Scaramuzza, D.; Neira, J.; Reid, I.; Leonard, J.J. Past, Present, and Future of Simultaneous Localization and Mapping: Toward the Robust-Perception Age. IEEE Trans. Robot. 2016, 32, 1309–1332. [Google Scholar] [CrossRef]
- Jindal, M.; Jha, A.; Cenkeramaddi, L.R. Bollard Segmentation and Position Estimation from Lidar Point Cloud for Autonomous Mooring. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–9. [Google Scholar] [CrossRef]
- Zhao, P.; Hu, Q.; Wang, S.; Ai, M.; Mao, Q. Panoramic Image and Three-Axis Laser Scanner Integrated Approach for Indoor 3D Mapping. Remote Sens. 2018, 10, 1269. [Google Scholar] [CrossRef]
- Gao, Y.; Liu, S.; Atia, M.M.; Noureldin, A. INS/GPS/LiDAR Integrated Navigation System for Urban and Indoor Environments Using Hybrid Scan Matching Algorithm. Sensors 2015, 15, 23286–23302. [Google Scholar] [CrossRef]
- Li, D.; Jia, X.; Zhao, J.; Xu, Q.; Zhang, P. An integrated navigation algorithm for SLAM/GNSS/INS based on extended Kalman filter. In Proceedings of the 9th China Satellite Navigation Conference (CSNC), Harbin, China, 23–25 May 2018; pp. 185–189. [Google Scholar]
- Rogers, J.G.; Fink, J.R.; Stump, E.A. Mapping with a ground robot in GPS denied and degraded environments. In Proceedings of the 2014 American Control Conference (ACC), Portland, OR, USA, 4–6 June 2014; pp. 1880–1885. [Google Scholar]
- Kaess, M.; Johannsson, H.; Roberts, R. Isam2: Incremental Smoothing and Mapping with Fluid Relinearization and Incremental Variable Reordering. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation (ICRA), Shanghai, China, 9–13 May 2011; pp. 3281–3288. [Google Scholar]
- Kaess, M.; Ranganathan, A.; Dellaert, F. Isam: Incremental Smoothing and Mapping. IEEE Trans. Robot. 2008, 24, 1365–1378. [Google Scholar] [CrossRef]
- Shan, T.; Englot, B.; Meyers, D.; Wang, W.; Ratti, C.; Rus, D. LIO-SAM: Tightly-Coupled Lidar Inertial Odometry via Smoothing and Mapping. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October–24 January 2021; pp. 5135–5142. [Google Scholar]
- Wan, G.; Yang, X.; Cai, R.; Li, H.; Wang, H.; Song, S. Robust and precise vehicle localization based on multi-sensor fusion in diverse city scenes. arXiv 2017, arXiv:1711.05805. [Google Scholar]
- Barfoot, T.D. State Estimation for Robotics; Cambridge University Press: Cambridge, UK, 2017; pp. 205–284. [Google Scholar]
- Chen, S.; Liu, B.; Feng, C.; Vallespi-Gonzalez, C.; Wellington, C. 3D Point Cloud Processing and Learning for Autonomous Driving: Impacting Map Creation, Localization, and Perception. IEEE Signal Process. Mag. 2021, 38, 68–86. [Google Scholar] [CrossRef]
- Wang, Z.; Wu, Y.; Niu, Q. Multi-Sensor Fusion in Automated Driving: A Survey. IEEE Access 2019, 8, 2847–2868. [Google Scholar] [CrossRef]
- Fung, M.L.; Chen, M.Z.; Chen, Y.H. Sensor fusion: A review of methods and applications. In Proceedings of the 2017 29th Chinese Control And Decision Conference (CCDC), Chongqing, China, 28–30 May 2017; pp. 3853–3860. [Google Scholar]
- Kim, H.; Lee, I. Localization of a car based on multi-sensor fusion. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci. 2018, 42, 247–250. [Google Scholar] [CrossRef]
- Strasdat, H.; Montiel, J.M.M.; Davison, A.J. Visual SLAM: Why filter? Image Vis. Comput. 2012, 30, 65–77. [Google Scholar] [CrossRef]
- Strasdat, H.; Montiel, J.; Davison, A.J. Real-time monocular SLAM: Why filter? In Proceedings of the 2010 IEEE International Conference on Robotics and Automation (ICRA), Anchorage, AK, USA, 3–7 May 2010; pp. 2657–2664. [Google Scholar]
- Mourikis, A.I.; Roumeliotis, S.I. A Multi-State Constraint Kalman Filter for Vision-aided Inertial Navigation. In Proceedings of the IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; pp. 3565–3572. [Google Scholar]
- Aulinas, J.; Petillot, Y.R.; Salvi, J.; Lladó, X. The slam problem: A survey. CCIA 2008, 184, 363–371. [Google Scholar]
- Liang, M.; Min, H.; Luo, R. Graph-based SLAM: A Survey. Robot 2013, 35, 500. [Google Scholar] [CrossRef]
- Dellaert, F.; Kaess, M. Factor graphs for robot perception. Found. Trends Robot. 2017, 6, 1–139. [Google Scholar] [CrossRef]
- Sola, J. Quaternion kinematics for the error-state Kalman filter. arXiv 2017, arXiv:1711.02508. [Google Scholar]
- Trawny, N.; Roumeliotis, S.I. Indirect Kalman filter for 3D attitude estimation. Univ. Minnesota Dept. Comp. Sci. Eng. Tech. Rep. 2005, 2, 2005. [Google Scholar]
- Forster, C.; Carlone, L.; Dellaert, F.; Scaramuzza, D. On-manifold preintegration for real-time visual—Inertial odometry. IEEE Trans. Robot. 2016, 33, 1–21. [Google Scholar] [CrossRef]
- Forster, C.; Carlone, L.; Dellaert, F.; Scaramuzza, D. IMU Preintegration on Manifold for Efficient Visual-Inertial Maximum-a-Posteriori Estimation. In Proceedings of the Robotics: Science and Systems, Rome, Italy, 13–17 July 2015. [Google Scholar]
- Moore, T.; Stouch, D. A Generalized Extended Kalman Filter Implementation for the Robot Operating System. In Proceedings of the 13th International Conference on Intelligent Autonomous Systems (IAS), Padova, Italy, 15–18 July 2016; pp. 335–348. [Google Scholar]
- Zhang, J.; Singh, S. LOAM: LiDAR odometry and mapping in real-time. In Proceedings of the Robotics: Science and Systems, Berkeley, CA, USA, 12–16 July 2014. [Google Scholar]
- Yan, Z.; Sun, L.; Krajnik, T.; Ruichek, Y. EU Long-term Dataset with Multiple Sensors for Autonomous Driving. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 25–29 October 2020. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hardware Module | Parameters() |
|---|---|
| NovAtel GNSS | Dual antenna; measurements (raw) data rate: 20 Hz; nominal accuracy: 1 cm (RTK); |
| IMU | Tactical-grade; gyroscopes angular random walk < 0.2 deg/√hr; and accelerometers velocity random walk < 0.035 m/s/√hr. |
| LiDAR | Number of channels: 16; accuracy of ranging: ±3 cm; scanning speed: 5 Hz,10 Hz,20 Hz; horizontal field of view: 360°; and vertical field of view: −15~+15°. |
| Data Name | Track Length | Acquisition Speed | Environmental Conditions |
|---|---|---|---|
| Playgrounds | 400 m | 1 m/s | Unobstructed |
| Campus | 1350 m | 1 m/s | Partially obscured by vegetation, buildings, etc. |
| Measurement | Points | Coords | GNSS | MSFO | GIL-CFK | GNSS-MSFO | GNSS-(GIL-CKF) | MFSO-(GIL-CKF) |
|---|---|---|---|---|---|---|---|---|
| MSFO | A | x | −345.058 | −346.122 | −346.166 | 1.064 | 1.108 | 0.044 |
| y | 135.007 | 133.756 | 134.136 | 1.251 | 0.871 | −0.38 | ||
| z | 6.714 | 10.599 | 10.341 | −3.885 | −3.627 | 0.258 | ||
| C | x | 85.709 | 85.134 | 85.115 | 0.575 | 0.594 | 0.019 | |
| y | −272.204 | −270.429 | −270.21 | −1.775 | −1.994 | −0.219 | ||
| z | −48.297 | −48.025 | −48.203 | −0.272 | −0.094 | 0.178 | ||
| F | x | 3.678 | 3.442 | 3.439 | 0.236 | 0.239 | 0.003 | |
| y | −270.326 | −271.588 | −271.126 | 1.262 | 0.8 | −0.462 | ||
| z | −48.352 | −48.124 | −48.24 | −0.228 | −0.112 | 0.116 | ||
| GNSS | B | x | 42.496 | 42.158 | 42.472 | 0.338 | 0.024 | −0.314 |
| y | 281.017 | 281.219 | 280.832 | −0.202 | 0.185 | 0.387 | ||
| z | −35.791 | −36.235 | −35.81 | 0.444 | 0.019 | −0.425 | ||
| D | x | 325.273 | 327.197 | 325.228 | −1.924 | 0.045 | 1.969 | |
| y | −484.906 | −483.345 | −484.83 | −1.561 | −0.076 | 1.485 | ||
| z | −48.351 | −48.14 | −48.363 | −0.211 | 0.012 | 0.223 | ||
| E | x | 161.932 | 161.896 | 161.922 | 0.036 | 0.01 | −0.026 | |
| y | −663.874 | −664.2 | −663.863 | 0.326 | −0.011 | −0.337 | ||
| z | −44.548 | −44.518 | −44.468 | −0.03 | −0.08 | −0.05 |
| Datasets | LO | LIO | MSFO | GIL-CKF |
|---|---|---|---|---|
| Playground dataset | >50 | 2.48 | 0.16 | 0.04 |
| Campus dataset | >100 | 18.3 | 0.38 | 0.05 |
| Utbm | —— | >100 | 2.27 | 1.36 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, H.; Wu, W.; Zhang, S.; Wu, C.; Zhong, R. A GNSS/LiDAR/IMU Pose Estimation System Based on Collaborative Fusion of Factor Map and Filtering. Remote Sens. 2023, 15, 790. https://doi.org/10.3390/rs15030790
Chen H, Wu W, Zhang S, Wu C, Zhong R. A GNSS/LiDAR/IMU Pose Estimation System Based on Collaborative Fusion of Factor Map and Filtering. Remote Sensing. 2023; 15(3):790. https://doi.org/10.3390/rs15030790
Chicago/Turabian StyleChen, Honglin, Wei Wu, Si Zhang, Chaohong Wu, and Ruofei Zhong. 2023. "A GNSS/LiDAR/IMU Pose Estimation System Based on Collaborative Fusion of Factor Map and Filtering" Remote Sensing 15, no. 3: 790. https://doi.org/10.3390/rs15030790
APA StyleChen, H., Wu, W., Zhang, S., Wu, C., & Zhong, R. (2023). A GNSS/LiDAR/IMU Pose Estimation System Based on Collaborative Fusion of Factor Map and Filtering. Remote Sensing, 15(3), 790. https://doi.org/10.3390/rs15030790